基于MATLAB的液压马达行走驱动控制原理仿真与应用
matlab液压马达控制编程案例
matlab液压马达控制编程案例液压马达是一种将液压能转化为机械能的装置,广泛应用于工业生产中。
为了实现对液压马达的精确控制,我们可以利用Matlab进行编程,实现对液压马达的控制。
首先,我们需要了解液压马达的工作原理。
液压马达通过液压油的流动来驱动转子旋转,从而产生机械能。
液压马达的转速和扭矩可以通过控制液压油的流量和压力来实现。
在Matlab中,我们可以利用Simulink工具箱来进行液压马达的控制编程。
首先,我们需要建立一个模型来描述液压马达的动态特性。
可以使用Simulink中的传输线模块来模拟液压油的流动,使用旋转机械模块来模拟液压马达的转子旋转。
接下来,我们需要确定控制液压马达的目标。
例如,我们可以设置一个期望的转速和扭矩值,然后通过调节液压油的流量和压力来实现这些目标。
可以使用Simulink中的PID控制器模块来实现对液压马达的控制。
在编程过程中,我们还需要考虑到液压马达的动态响应特性。
液压马达的转速和扭矩响应时间较长,因此在控制过程中需要考虑到这些延迟。
可以使用Simulink中的延迟模块来模拟液压马达的响应延迟。
最后,我们可以通过Matlab的仿真功能来验证我们的控制策略。
可以设置不同的输入信号,例如阶跃信号或正弦信号,来测试液压马达的控制性能。
通过观察输出信号的响应,我们可以评估控制策略的有效性。
总之,利用Matlab进行液压马达控制编程可以帮助我们实现对液压马达的精确控制。
通过建立模型、设置控制目标、考虑动态响应特性以及进行仿真验证,我们可以设计出高效的液压马达控制策略。
这对于提高工业生产的效率和质量具有重要意义。
基于AMESim的轮胎式起重机行走液压系统仿真与优化_韩彗仙
基于A MESi m的轮胎式起重机行走液压系统仿真与优化湖南机电职业技术学院 韩彗仙 三一重工股份有限公司 曹显利摘 要:介绍了AM ES i m软件的主要特点,分析了轮胎式起重机行走系统的工况和对液压系统的性能要求,根据工况要求提出了液压系统的设计方案,应用AM ESi m构建了轮胎式起重机行走液压系统模型,通过模型的制动性能测试和参数优化,得出了轮胎式起重机行走液压系统建模与仿真的结论。
关键词:轮胎式起重机;行走液压系统;仿真;优化Abstrac t:T he paper presents t he m a i n feat ures of AM ESi m so ft wa re and ana lyzes the opera ti ona l cond iti on o f t he rub-ber-tired C rane s trave li ng sy stem and perfo r mance requ i re m ent of the hydrau lic syste m It also offers how t o desi gn the hy-drau lic trave li ng sy stem m eeti ng the crane operationa l require m ent aud how the m ode l fo r the travc li ng syste m is bu ilt by m eans o f AM ESi m The opti m iza ti on resu lts can be obta i ned through braki ng per f o r m ance test and pa rame tr i c op ti m ization K eywords:rubber-tired crane;hydraulic traveli ng syste m;s i m u l ation;opti m i zati on1 引言AM ES i m是由法国I M AG I N E公司开发的一款仿真平台,其主要特点有:(1)多学科协同仿真平台,能对动力、机构、液压、电控、气动、热力学等不同领域的对象进行联合仿真;(2)其提供的模型库基于国际标准的图形符号,易于使用,用户无需有很深的建模能力即可构建较为真实的仿真系统;(3)运用该软件建模与仿真过程分为搭结构、选模型、定参数、运行等步骤,每个步骤都可逐步细化,使仿真系统的复杂程度逐步提高,直到实现满意的运行结果;(4)AMESi m可对仿真系统进行静态和动态性能分析,可提供功能强大的图形分析工具,使仿真结果输出更直观;(5)液压元件设计库和超模块功能可进行模型的2次开发;(6)批处理功能可对仿真系统进行优化设计。
利用MATLAB实现变量泵定量马达调速系统的动态仿真_张红俊

利用M AT LAB 实现变量泵定量马达调速系统的动态仿真张红俊1,李增玲2(1.山西煤炭职业技术学院,山西太原030031;2.山东省东营市东营区试验中学,山东东营257000)摘 要:通过对变量泵定量马达容积调速系统的数学建模和利用M AT L AB 进行动态仿真,直观地分析了系统的动态特性以及影响特性的因素和影响规律,仿真结果与系统的理论分析相符合。
关键词:容积调速系统;动态特性;动态仿真中图分类号:T P393 文献标识码:A 文章编号:1008-8881(2004)01-0082-02工程实际中广泛利用变量泵定量马达调速系统,尤其是大型工业机械。
系统回路的动态分析是系统设计及生产实际的需要,利用M AT L AB 这一强大的工程工具进行计算机动态特性的分析是十分有效和有实际意义的。
一、液压调速系统原理变量泵定量马达的调速系统如图1。
图1 容积调速液压系统原理通过改变泵的每转排量q p 来调节马达的转速n m 。
n m =q p n p q m(1)式中:n p )))变量泵的转速;q m )))定量马达的每转排量。
二、系统数学模型的建立为了分析方便,作如下假设:液压泵的吸油口和液压马达的回油口油压力为零;油液的粘性不变;液压泵和液压马达的泄漏油流为层流;不考虑油液的液阻和液感及管路中的动态过程,仅考虑液容;不考虑液压泵的脉动性。
1.流量连续性方程n p q p -(c p +c m )p-n m q m =v k dpdt(2)式中:n p ,n m )))泵和马达的转速;v )))压力油腔总容积;q p ,q m )))泵和马达的排量;p )))压力油腔压力;k )))油液体积弹性模量;c p ,c m )))泵和马达的泄漏系数。
2.液压马达转矩平衡方程q m p=Jdn mdt+Bn m +T l (3)式中:J )))马达及负载折算到马达轴上的等效转动惯量;B )))粘性阻尼系数;T 1)))负载力矩。
在Simulink环境中建立液压元件仿真子模块解读

5.1.3 在Simulink环境中建立液压元件仿真子模块5.1.3.1 Simulink环境中液压系统的仿真与建模原理Simulink可以用来对动态系统进行建模、仿真和分析,支持连续、离散及两者混合的线性、非线性系统,并提供了建模的图形接口,包括了众多线性和非线性等环节,可方便地扩展,使得系统的构建容易,所以适合于液压系统中普遍存在的非线性问题的求解,并且与传统的仿真软件包用微分方程和差分方程建模相比,具有更直观、方便、灵活的优点。
液压系统模型的建立充分利用了Simulink所提供的建立子模块的方法,采用从上到下或从下到上的递阶结构创建复杂系统的仿真模型。
对于每一个液压元件及容腔节点建立一个可重复利用和易于参数修改的子模块,在模型的最上层,对各处模块进行连接即可建立系统的仿真模型。
各子模块的建立是根据液压元件的数学模型,利用Simulink所提供的基本的线性和非线性模块将液压元件的数学模型表述出来,根据液压元件的功能与特性定义其输入输出。
模块为黑箱结构,只通过输入输出与外界联系,通过参数定义界面,可由用户对元件的参数进行赋值或实时修改。
液压系统建模是依据节点法建模。
系统某点的压力与流入和流出该点的流量有关。
根据节点法建模的原理,在每个液压元件建模时要对一些数学模型进行适当的等价变换。
要求元件的输入为压力,输出为流量。
含有微分方程的数学模型要进行拉氏变换,使得元件的数学模型能够利用Simulink软件表述出来。
Simulink仿真库包含有sinks(输入方式)、 Source(输入源)、 Continuous (连续模块)、 Discontinuities(非线性模块)、 Connection(连接与接口)等子模块库,每个子模块库中都包含有相应的功能模块,用户也可以定制和创建自己的模块。
利用这些模块可以将液压系统中的每个元件都定义为一个子模块。
根据不同的液压系统可以将这些子模块方便的组成液压系统仿真模型。
液压系统建模和仿真SimHydraulics
--液压系统建模和仿真SimHydraulics是液压传动和控制系统的建模和仿真工具,扩展了Simulink®的功能。
使用这个工具可以建立起含有液压和机械元件的物理网络模型,可用于跨专业领域系统的建模。
SimHydraulics提供了构成液压系统的元器件模块库,库中也包括了用于构造其它元件的基本元素模块。
SimHydraulics适用于汽车,航空,国防和工业装备等领域中的各种应用,例如自动变速器,舵面操纵系统和重载驱动装置的建模分析。
SimHydraulics同SimMechanics,SimDriveline和SimPowerSystems一同使用,能够支持对复杂机液系统和电液系统的建模,以分析他们相互交联的影响。
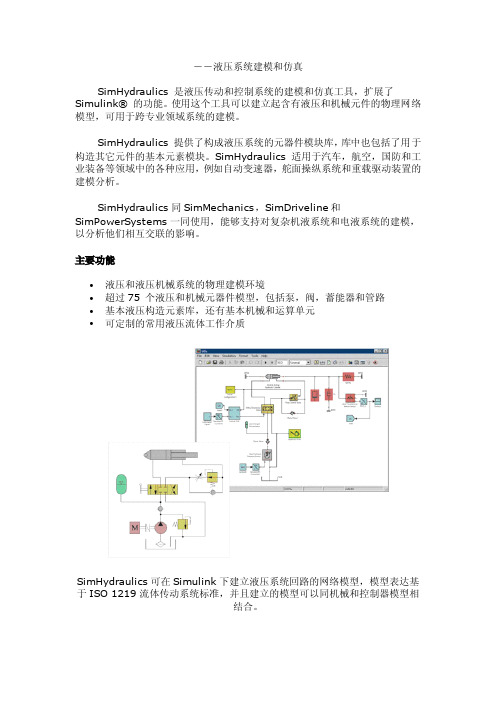
主要功能•液压和液压机械系统的物理建模环境•超过75个液压和机械元器件模型,包括泵,阀,蓄能器和管路•基本液压构造元素库,还有基本机械和运算单元•可定制的常用液压流体工作介质SimHydraulics可在Simulink下建立液压系统回路的网络模型,模型表达基于ISO1219流体传动系统标准,并且建立的模型可以同机械和控制器模型相结合。
机械液压和液压系统网络建模使用SimHydraulics可以建立起完整的液压系统模型,过程如同组建一个真实的物理系统。
SimHydraulics使用物理网络方式构建模型:每个建模模块对应真实的液压元器件,诸如油泵,液压马达和控制阀;元件模块之间以代表动力传输管路的线条连接。
这样,就可以通过直接描述物理构成搭建模型,而不是从基本的数学方程做起。
SimHydraulics库提供了75个以上的流体和液压机械元件,包括油泵,油缸,蓄能器,液压管路和一维机构单元,大部分商品化元器件都可以找到对应模型。
SimHydraulics的模型符号符合ISO1219流体动力系统标准,SimHydraulics可以自动从模型原理图综合出描述系统行为特征的方程组。
SimHydraulics得到的是直接使用Simulink的求解器求解的方程组形式,而不是采用同步仿真方法,这样液压系统模型就完全同其它Simulink模型部分集成在一起。
基于matlab的步进电机转速控制仿真(论文)
摘要一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。
每输入一个冲信号,该电动机就转过一定的角度(有的步进电动机可以直接输出线位移,称为直线电动机)。
因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。
随着数字控制系统的发展,步进电动机的应用逐渐扩大。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机、交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
在产品成型之初尚若利用仿真软件设计电路,仿真是对其进行研究的一个重要的不可缺少的手段,在仿真环境中进行控制程序的调试,这不仅不需要实际的硬件设备,更能部分满足工程需求。
MATLAB 语言是一种面向科学工程计算的高级语言,它集科学计算、自动控制、信号处理、神经网络、图像处理等功能于一体,是一种高级的数学分析与运算软件,可用作动态系统的建模和仿真。
基于MATLAB的simulink仿真环境下建立了步进电机模型,不仅仿真结果与实物仿真一致,而且其仿真方法简单,仿真时间大大缩短,是一种理想的步进电机仿真研究方法。
关键词:步进电机,matlab,simulink,仿真ABSTRACTGeneral Motors is a continuous rotation, while the step is electric rotating step by step, so called stepper motors. Each input of a red signal, the motor will turn a certain angle (some stepper motors can be directly output line displacement, known as the linear motor). Therefore, the stepper motor is a pulse into the point of displacement (or linear displacement) of the implementation of the components. With the development of digital control systems, stepper motor application gradually expanding. Although the stepper motor has been widely used, but the stepper motor does not like a normal DC motor, AC motor used in the routine. It must be double-ring pulse signal drive circuit composed of control before use.Used in the product forming the beginning of Shang Ruoli simulation software circuit simulation is an important study of itsIndispensable want of means to control program simulation environment for debugging, not only without actually hardware, better Bufen meet the engineering requirements. Matlab language is a science and engineering calculations for high-level language, which combines scientific computing, automatic control, signal processing, neural networks, image processing and other functions into one, is an advanced mathematical analysis and computation software can be used as dynamic Modeling and Simulation. MATLAB-Simulink simulation environment based on the establishment of a stepping motor under the model, simulation results not only consistent with the physical simulation, and the simulation method is simple, the simulation time is shortened, it is an ideal stepping motor simulation methods.KEY WORDS:Stepper motor, matlab, simulink, simulation前言步进电机问世以后,很快确定了自己的应用场合为开环高分辨率的定位系统,工业应用发展到今已有约30年的历史,目前还没有更适合的取代它的产品,而且已经发展成为除直流和交流电机外的第三大类电动机产品,但毕竟发展历史不长,人们从应用的角度看仍有不成熟的感觉。
基于AMESim与Simulink的液压牵引器驱动机构联合仿真
机电工程技术第50卷第01期MECHANICAL&ELECTRICAL ENGINEERING TECHNOLOGY Vol.50No.01 DOI:10.3969/j.issn.1009-9492.2021.01.019洪诗益,吴伟,刘斌基于AMESim与Simulink的液压牵引器驱动机构联合仿真[j].机电工程技术,2021,50(01):67-70.基于AMESim与Simulink的液压牵引器驱动机构联合仿真洪诗益,吴伟,刘斌(西安石油大学机械工程学院,西安710065)摘要:在复杂的水平井工况下,轮式液压牵引器比机械式牵引器表现更好。
而液压牵引器推靠系统需要能适应套管变化的控制系统才能应对复杂的井下工况。
以某一型号液压牵引器的液压推靠系统为研究对象,先利用AMESim软件建立对应的牵引器液压推靠系统仿真模型,根据Simulink软件在控制系统设计方面的优势,设计了PID控制和模糊PID控制,对牵引器液压推靠系统进行联合仿真。
结果表明,模糊PID控制更加拟合仿真曲线,具有更好的控制效果,为牵引器液压推靠控制提供技术支持。
关键词:液压牵引器;AMEsim/Simulink;联合仿真;模糊PID中图分类号:TP273文献标志码:A文章编号:1009-9492(2021)01-0067-04开放科学(资源服务)标识码(OSID):Simulation Analysis of Driving Mechanism of Hydraulic Tractor Based onAMESim/SimulinkHong Shiyi,Wu Wei,Liu Bin(School of Mechanical Engineering,Xi'an Shiyou University,Xi'an710065,China)Abstract:Wheeled hydraulic tractors perform better than mechanical tractors in complex horizontal well conditions.The hydraulic retractor propulsion system needs a control system that can adapt to casing changes in order to cope with complex downhole conditions.Taking the hydraulic propulsion system of a certain type of hydraulic retractor as the research object,AMESim software was first used to establish the corresponding hydraulic propulsion system simulation model. According to the advantages of Simulink software in the control system design,PID control and fuzzy PID control were designed to carry out joint simulation of the hydraulic propulsion system of the retractor.The results show that the fuzzy PID control can better fit the simulation curve and has better control effect,which provides technical support for the hydraulic pushback control of the tractor.Key words:hydraulic tractor;AMEsim/Simulink;co-simulition;fuzzyPID0引言井下牵引器是依靠自身所携带的动力源,具有一定自主操控能力并能在井下特殊环境中完成特定工作任务的机电一体化装置。
液压系统仿真软件及其应用
液压系统仿真软件及其应用王亮1, 韩虎2, 高洁1(1.山东科技大学机电学院, 山东青岛266510 ; 2.临沂师范学院工程学院, 山东临沂276005)摘要: 主要介绍了几种常用液压系统仿真软件:Hopsan ,ADAMS/Hydraulics ,Matlab/Simulink , AMESim ,简要分析了这些软件的特点,最后分别给出了每种软件的工程实例应用, 择这些仿真软件中的一种进行液压系统设计。
关键词: 液压系统; 仿真; ADAMS/Hydraulics ; MATLAB/Simulink ; AMESim中图分类号: TP31 文献标志码:A文章编号:1003-0794 (2007) 12-0102-03System Simulation Soft ware and UtilizationWANG Liang1,HAN Hu2,GAO Jie1(1. College of Mechanic and Electric Engineering, Shandong University of Science and Technology, Qingdao 266510,China; 2. Engineering College , Linyi Normal University , Linyi276005 ,China)Abstract :Some kinds of hydraulic system simulation software were intruduced :Hopsan ,ADAMS/Hydraulics , Matlab/Simulink ,AMESim , analyzed their own character , at last , given a project application example respectively , this examples proved that can chose a kind of hydraulic system simulation software to carry on designing of hydraulic system.Key words :hydraulic system ; simulation ; ADAMS/Hydraulics ; MATLAB/Simulink ; AMESim 0引言随着机电一体化技术在现代机械中的应用,液压系统在一台机械中的造价比率越来越高,液压系统越来越复杂,因此对液压系统进行设计和分析的困难越来越大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4 现场使用分析
将本文建立的液压马达系统原理应用于国外某新
建的连铸生产线中, 验证该系统的实际使用情况。现 场中间罐车实际使用情况如图 6 所示。
14
Hydraulics Pneumatics & Seals/No.02.2017
doi:10.3969/j.issn.1008-0813.2017.02.005
路 16 中的单双向节流阀 6 实现; 中间罐车行走马达高、 换速度调节通过调整高速控制回路 16 中的单双向节流 阀 6 实现, 保证速度切换时中间罐车运行平稳, 避免出 现管路冲击现象。
3 仿真分析
成, MATLAB/Simulink 软件是目前机电液耦合系统仿真
本 文 的 仿 真 利 用 MATLAB/Simulink 仿 真 软 件 完
立的仿真模型如图 3 所示。图中液压马达排量为 列的普通换向阀, 按照连铸工艺要求的运行工况对该 液压马达运行情况进行运转, 观察液压马达行走驱动 系统的响应特性是否满足使用要求。 3.1 空载时系统响应特性 系统的响应特性可以通过检测液压马达的旋转速 度的数值来判定。根据中间罐车的运行要求, 中间罐 车从等待位置驶向浇注位置, 在中间罐车的运行起始 阶段, 为了减少中间罐车的冲击, 中间罐车以低速启 动, 运行一定距离后, 为了提高作业效率, 使中间罐车 尽快到达浇注位置并开始浇注作业, 中间罐车须加速 运行, 在即将到达浇注位置时, 为了保证中间罐车能平 稳地停靠在浇注位置, 中间罐车设置有减速位置, 以使
(c) 中间罐车带载运行状态 (d)中间罐车驻车浇注状态
图 6 现场液压马达驱动中间罐车行走使用图
6b 为在空载状态下中间罐车的运行图, 图 6c 为带载状
图 6a 为现场实际的液压马达控制回路实物图, 图
态下中间罐车的运行图, 图 6d 为中间罐车驻车浇注状 态图, 经现场调试及连续生产使用表明, 该系统具有运 等优点。
13
10-两位电磁换向阀 11-单向节流阀 12-液控单向阀 13-单向阀 17-制动器回路。
图 2 中间罐车液压马达驱动控制原理
供油控制回路 14、 低速控制回路 15、 高速控制回路 16
如图 2 所示, 液压系统包括液压马达 1、 制动器 2、
和制动器回路 17。当中间罐车行走到浇注位置及烘烤 位置时,通过操作供油控制回路 14, 操作人员能方便地 切断高压油源,使中间罐车能可靠地停留在工艺要求的 位置,防止误操作及液压阀故障导致中间罐行走失控现
图 1 中间罐车机械结构
磁换向阀 10 的电磁铁 b 得电, 行走马达制动器 2 松开, 制动器速度通过调节单向节流阀 11 实现; 低速控制回 路 15 中的三位电磁换向阀 9 的电磁铁得电, 中间罐车 回路 15 中的单双向节流阀 6 实现; 高速控制回路 16 中 的三位电磁换向阀 9 的电磁铁得电、 低速控制回路 15
领域使用较为广泛的软件, 在灵活的系统环境下提供 了各种控制系统的仿真模块, 支持对各种控制系统的 建模及仿真研究。在 MATLAB/Simulink 软件环境下建 125mL/r, 系统工作压力为 20MPa, 方向阀选用力士乐系
6-单双向节流阀 7-液压锁 8-液控换向阀 9-三位电磁换向阀 14-供油控制回路 15-低速控制回路 16-高速控制回路 1-液压马达 2-制动器 3-高压胶管 4-高压球阀 5-溢流阀
收稿日期: 2016-12-22
1 中间罐车设备
在连续铸钢领域, 中间罐车的作用是将烘烤到一
定温度的中间罐从烘烤位置运送到钢水浇注位置, 从 而保证高温的钢水从大包顺利注入中间罐, 再由中间 罐通过塞棒机构控制流入结晶器内的钢水容量, 以使 钢水在结晶器内形成一定尺寸规格的铸坯。在钢水浇 注完成后, 中间罐车再将完成钢水浇注且只剩下钢渣 的中间罐运送回中间罐烘烤位置, 进行中间罐的更换 工序。如果在钢水浇注过程中, 由于出现事故导致中 间罐的钢水无法控制, 中间罐车将从钢水浇注位快速 逃离并驶向事故位置, 从而保证设备及人员的安全。 图 1 所示为中间罐车的机械结构, 图中用于承载钢
图 4 空载时速度-时间响应特性
行可靠、 电气控制方式简便、 故障排除容易及维修简单
5 结论
3.2 带载时系统响应特性 中间罐车带负载运行时, 控制要求与空载运行相 同, 现按最大负载考虑, 即中间罐车增加中间罐及钢水 的总重量, 系统运行过程中的速度响应特性如图 5 所 示, 仿真结果表明: 由于系统带负载运行, 该液压马达 行走系统速度较空载时速度变化时间较长, 且最大稳 定运行速度下降, 但运行过程平稳, 完成能满足中间罐 车的使用要求。
水的中间罐 4 置于中间罐车车体 1 上; 两台左右对称的 液压马达行走机构 3 固定在中间罐车车体 1 上, 用于驱 达控制阀台 2 也固定在中间罐车车体 1 上, 用于控制和
基金项目: 陕西省工业科技攻关项目 (2016GY-010) 专业:液压传动与控制。
作者简介: 丘铭军 (1979-) , 男, 广东梅州人, 高级工程师, 研究生, 从事
(China National Heavy Machinery Research Institute Co., Ltd., xi’ an 710032, China)
Abstract: Travelling control system of hydraulic motor in tundish car is usually controlled by servo valve or proportional valve, this paper introduces the specific structure of machinery and travelling control requirementsof hydraulic motor, proposes the combination of normal directional valve into travelling system as well asconducts simulated analysis to this model.The controlling system has been proved on-site thatit has stable operation, simple structure, low failure rate and easy in maintenance. Key words: tundish car; travelling; hydraulic motor; directional valve; simulation; Simulink
文献标志码: A 文章编号: 1008-0813 (2017) 02-0012-04
Байду номын сангаас
丘铭军, 郭星良, 宁
博, 陈国防
Simulation and Application of Hydraulic Motor Travelling Control System Based on MATLAB
QIU Ming-jun, GUO Xing-liang, NING Bo, CHEN Guo-fang
2 液压系统原理
如图 2 所示。
根据中间罐车的控制要求, 结合中间罐车的机械
行走马达实现慢速行走, 行走速度通过调节低速控制
结构特性, 设计中间罐车液压马达驱动控制液压原理
中的三位电磁换向阀 9 的电磁铁得电, 中间罐车行走马 低速切换时对高速控制回路 16 中的液控换向阀 8 的切
达实现高速行走, 高速行走速度通过调节高速控制回
液压气动与密封/2017 年第 02 期
doi:10.3969/j.issn.1008-0813.2017.02.004
基于 MATLAB 的液压马达行走 驱动控制原理仿真与应用
(中国重型机械研究院股份公司, 陕西 西安 710032)
摘 要: 连铸中间罐车液压马达行走驱动控制原理通常采用伺服阀或者比例阀进行控制, 该文介绍了中间罐车的具体结构及液压马达 的行走驱动控制要求, 提出了采用普通换向阀进行组合控制的方式, 并对该原理进行了仿真研究。通过现场的使用, 证明该控制原理 具有运行稳定、 结构简单、 故障率低以及维修容易等优点。 关键词: 中间罐车; 行走驱动; 液压马达; 换向阀; 仿真; Simulink 中图分类号: TH137.5
基于 AMESim 的动力猫道钻杆推送机构 同步问题仿真分析
刘永胜 1,2,刘远波 1,2,刘志林 1,2,廖丽华 1,2,李友兴 1,2,郭乾坤 1,2
2.国家油气钻井装备工程技术研究中心, 陕西 宝鸡 721002)
摘 要: 钻柱自动化处理系统是提高钻机自动化水平和钻井作业效率的重要装备。该文以钻柱自动化处理系统中的猫道机在现场试 验过程中出现的钻杆推送机构不同步问题进行研究, 分析了钻杆推送机构的液压系统及不同步的原因, 并建立了 AMESim 的仿真模 结果与原模型结果进行比较, 选出了对于现场应用来说的理想解决方案, 指导现场解决不同步问题。 关键词: 猫道机; 钻杆推送机构; AMESim; 同步性能; 仿真分析 中图分类号: TH137
动中间罐车在支撑钢轨 5 上行走; 中间罐车行走液压马
12
驱动液压马达行走机构 3。
象。通过操作低速控制回路 15, 操作人员能方便地控 启动及停止时发生的冲击现象。通过操作高速控制回 路 16, 操作人员能快速控制中间罐的行走, 节省中间罐 车从预热位置移动到浇注位置的时间, 同时在浇注出 现事故时, 中间罐车能快速逃离浇注位置, 保护中间罐 车设备不受钢水烧毁, 保证设备及人员的安全, 避免出 现安全生产事故。
0 引言
统复杂, 后期维护运营成本大。 本文将采用普通换向阀组合控制方式对中间罐车 行走液压马达进行控制, 与采用比例阀或伺服阀相比, 电气控制方式简单, 成本低, 维修方便并能大大提高系 统的工作可靠性。