四象限变流器PWM双闭环控制系统的计算机仿真_李波
四象限变流器控制策略研究与仿真概要
四象限变流器控制策略研究与仿真宋文胜 , 刘志敏 , 冯晓云(西南交通大学电气工程学院 , 四川成都610031摘要 :在建立基于理想开关函数的单相四象限变流器数学模型的基础上 , 对四象限变流器常用的 5种控制策略进行研究 , 并通过计算机仿真对各种控制策略的控制性能进行对比分析。
仿真结果表明 , 预测电流控制和瞬态电流控制可以达到直流侧电压稳定、网侧电流谐波小、网侧单位功率因数等控制目标。
关键词 :四象限变流器 ; 控制策略 ; 仿真中图分类号 :U264.3+7; TM 461文献标识码 :A文章编号 :1672-1187(2007 02-0034-04Research and simulation on the control strategy of 4-quadrant converterSONG Wen-sheng , LIU Zhi-min , FENG Xiao-yun(College of Electrical Engineering , Southwest Jiaotong University , Chengdu 610031, ChinaAbstract :Based on the mathematic model of ideal switch function for a single-phase 4-quadrant converter , five kinds of control strategy are studied , and analysis is made for each strategy by computer simulation. Results show that the predicted current control andtransient current control can reach the control aims , such as voltage stabilization of DC-link , low harmonic distortion of the line current and unity power factor.Key words :4-quadrant converter ; control strategy ; simulation电力机车与城轨车辆Electric Locomotives &Mass Transit Vehicles研究开发第 30卷第 2期 2007年 3月 20日Vol. 30No. 2M ar. 20th , 2007收稿日期 :2006-10-20作者简介 :宋文胜 , 在读硕士研究生 , 主要研究方向为电力电子与电传动。
双闭环PWM逆变器的MATLAB仿真
3主 要结 论及支 护建 议
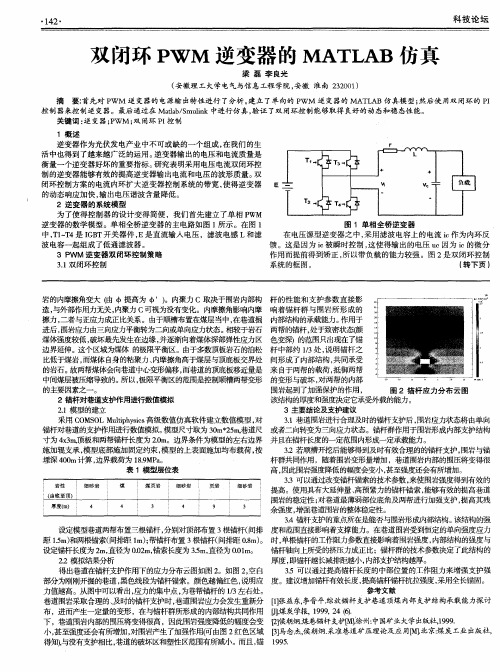
采用 C O MS O L M u l t i p h y s i c s 高级数值仿 真软件建立数值模型 , 对 3 . 1巷道围岩进行合理及时的锚杆支护后 , 围岩应力状态将由单向 锚杆对巷道的支护作用进行数值模拟。 模型尺寸取为 3 0 m* 2 5 m , :  ̄道尺 或者二向转变为三 向应力状态。锚杆群作用于围岩形成内部支护结构 寸为 4 x 3 r n ’ 顶板和两帮锚杆长度为 2 . 0 m。边界条件为模型的左右边界 并且在锚杆长度 的一定范围内形成一定承载能力。 施加辊支承 , 模 型底部施加 固定约束 , 模型的上表面施加均布载荷 , 按 3 . 2若顺槽开挖后能够得到及时有效合理的的锚杆支护 , 围岩与锚 埋深 4 0 0 m计算, 边界载荷为 1 8 . 9 MP a 。 杆群共同作用 ,随着围岩变形量增加 ,巷道围岩内部的围压将变得很 表 1模型层位表 高, 因此围岩强度降低 的幅度会变小 , 甚至强度还会有所增加 。 3 . 3可以通过改变锚杆锚索的技术参数 , 来使围岩强度得到有效的 岩性 细砂 岩 煤 煤 页岩 细砂岩 员岩 细 砂岩 提高。使用具有大延伸量 、 高预紧力的锚杆锚索 , 能够有效的提高巷道 ( 由底至顶) 围岩的稳定性; 对巷道最薄弱部位底角及两帮进行加强支护, 提高其残 厚度( m) 4 4 3 4 9 3 余强度 , 增强巷道围岩的整体稳定陛。 3 . 4锚杆支护的重点所在是能否与围岩形成内音 潴 构。 该结构的强 设定模型巷道两帮布置三根锚杆 , 分别对顶部布置 3根锚杆( 间排 度和范围 直接影响着支撑能力 。 在巷道 围 岩受到恒定的单 向强度应力 距1 . 5 m) 和两根锚索( 间排距 l m) ; 帮锚杆布置 3 根锚杆( 间排距 0 . 8 m) 。 时, 单根锚杆的工作阻力参数直接影响着围岩强度 , 内部结构的强度与 设定锚杆长度为 2 m, 直径为 0 . 0 2 m, 锚索长度为 3 . 5 m, 直径为 0 . 0 1 m。 锚杆轴 向上所受的挤压力成正 比;锚杆群的技术参数决定了此结构的 2 . 2模拟结果分析 厚度 , 即锚杆越长减排距越小, 内部支护结构越厚。 得出巷道在锚杆支护作用下的应力分布云图如 图 2 。如图 2 , 空白 3 . 5可以通过提高锚杆长度的中部位置的工作阻力来增强支护强 部分为刚刚开掘的巷道 , 黑色线段为锚杆锚索。颜色越偏红色, 说明应 度。建 曾 加锚汗= 有效长度, 提高锚杆锚杆抗拉强度, 采用全长锚 固。 参考 文献 力值越高。从图中可以看出, 应力的集中点 , 为巷帮锚杆的 1 / 3 左右处 。 巷道围岩采取合理的、 及时的锚杆支护时 , 巷道围岩应力会发生重新分 f 1 1 张益 东, 李晋平. 综放锚杆支护巷道顶煤 内部支护结构承载能力探讨 布,进而产生一定量的变形 ,在与锚杆群所形成的内部结构共同作用 叨. 煤炭 学抿 1 9 9 9 , 2 4 . 2 喉 朝炯. 煤巷锚杆支护口 . 徐州: 中国矿业大学出版社, 1 9 9 9 . 下 ,巷道围岩内部的围压将变得很高 ,因此围岩强度降低的幅度会变 f
四象限变流器控制策略研究与仿真

四象限变流器控制策略研究与仿真四象限变流器是一种用于电力系统中的电力电子装置,用于控制和调节电流的方向和大小。
它可以将电能从一个电源传输到另一个负载,同时可以改变电流的方向和大小。
四象限变流器具有广泛的应用领域,包括电力系统中的输配电、工业过程控制和电动机驱动等。
四象限变流器的控制策略研究与仿真是为了优化其性能和提高其控制效果。
通过研究和仿真,可以找到最佳的控制策略,使四象限变流器在不同工况下都能保持稳定的运行。
在四象限变流器的控制策略研究中,有几个关键的问题需要解决。
首先是如何实现电流的双向控制。
由于四象限变流器可以改变电流的方向,因此需要设计合适的控制算法来实现电流的双向控制。
其次是如何实现电流的精确调节。
在不同的应用场景下,电流的大小需要根据实际需求进行调节,因此需要设计合适的控制策略来实现电流的精确调节。
最后是如何实现系统的稳定性和抗干扰性。
在实际的工作环境中,系统可能会受到各种干扰,因此需要设计合适的控制算法来保证系统的稳定性和抗干扰性。
为了研究四象限变流器的控制策略,可以使用仿真工具进行仿真实验。
通过建立四象限变流器的数学模型,并设计合适的控制算法,可以对系统进行仿真,并分析系统的性能指标。
通过仿真实验,可以得到系统的响应特性、控制精度和稳定性等信息,从而评估不同控制策略的优劣。
在仿真实验中,可以使用不同的控制策略进行比较和分析。
可以比较不同控制策略在电流调节精度、系统稳定性和抗干扰性等方面的性能差异。
通过比较和分析,可以找到最佳的控制策略,以满足实际应用需求。
除了仿真实验,还可以进行实际的实验验证。
通过搭建实际的四象限变流器系统,并设计合适的控制策略,可以进行实验验证。
通过实验验证,可以验证仿真结果的准确性,并进一步优化控制策略。
四象限变流器的控制策略研究与仿真是为了优化其性能和提高其控制效果。
通过研究和仿真,可以找到最佳的控制策略,使四象限变流器在不同工况下都能保持稳定的运行。
通过仿真实验和实际实验验证,可以验证控制策略的有效性,并进一步优化系统性能。
双闭环控制PWM变流器动态响应性能优化研究
Op t i ma l St ud y o n t h e Dy n a mi c Re s po n s e Pe r f o r ma nc e o f
c u r r e n t . F i n a l l y , a s i mu l a t i o n mo d e l i s b u i l t i m MAT L AB / S i mu l i n k . T h e s i mu l a t i o n r e s u l t s h o w s t h a t t h e r e c t i i f e r a d o p t e d t h e n e w c o n t r o l me t h o d i s f r u t h e r t o i mp r o v e d y n a r i c r e s p o n s e c h a r a c t e i r s t i c o f t h e DC b u s v o h a g e o f t h e r e c t i i f e r t h a n t h e
1 引言
基于 传统 双闭 环控 制 的三 相 P WM 变 流 器现 如 今
的硬件成本, 具有良好的工程应用前景。 2 变流器数学模型
2 . 1 网侧变 流器模 型
被广泛的使用在各类领域 , 但 是随着工业领域对变流 器控制性能要求的不断提高, 传统控制方式下的变流 器动态响应需要改进。在此前提下 , 本文结合传统控 制方式 , 提出了改进型控制策略 , 即在电流内环引入前
l i n e f u z z y c o r r e c t i o n PI D p a r a me t e r s . Me a n u hi l e t h e f e e d f o r wa r d c o mp e n s a t i o n me c h a n i s m i s a d d e d t o i n t e r n a l c o n t r o l o f
全数字化双闭环可逆直流PWM调速系统的研究-开题报告
毕业设计(论文)开题报告信电系专业级班
课题名称:全数字化双闭环可逆直流PWM调速系统的研究
毕业设计(论文)起止时间:
20 年 2 月15 日~ 6 月7 日(共13 周)
学生姓名:学号:
指导教师:
报告日期:年3月5日
说明:
1.本报告必须由承担毕业设计(论文)课题任务的学生在接到“毕业设计(论文)任务书”、正式开始做毕业设计(论
文)的第2周或第3周末之前独立撰写完成,并交指导教师审阅。
2.每个毕业设计(论文)课题撰写本报告一份,作为指导教师、教研室主任审查学生能否承担该毕业设计(论文)课
题任务的依据,并接受学校的抽查。
直流电机PWM双闭环调速系统的控制策略优化与仿真
直流电机PWM双闭环调速系统的控制策略优化与仿真作者:杨世芳邹富雄来源:《科教导刊·电子版》2014年第20期摘要本文经过对仿真模型的讨论,采用H型主电路和直流PWM-M双闭环可逆调速控制策略对直流电机调速。
运用MATLAB/Simulink搭建仿真,仿真结果显示良好的动态与静态性能,且有效抑制过流,为直流电机控制系统分析和设计提供了有效途径。
关键词直流电动机调速 MATLAB/Simulink 电力拖动自动控制系统中图分类号:TM921.5 文献标识码:A直流调速系统调速范围广、稳定性好、过载能力大,具有良好的稳态、动态性能,在高性能的拖动技术领域中,可以克服交流调速的诸多缺点,例如变频必须变压、变频变压调速的两个非线性关系的问题等,直流电机调压调速,不改变电机负载的性质,并且速度与电压线性相关,较之交流调速,有更广泛的应用价值。
为充分利用电动机的过载能力加快启动进程,在单闭环系统基础上,专门加入电流调节器,构成转速-电流双闭环调速系统。
实现在最大电枢电流约束下的转速最快过渡过程。
由于双闭环调速系统调速范围广、精度高、动态性能好、易于调节与控制的优点,在工业生产过程及电气传动领域中得到广泛应用。
1双闭环调速系统的设计与仿真为了优化单闭环系统的调速过渡过程,同时克服几个信号综合在一个调节器输入端的不便,将被控量电机转速与电流分别加以控制,形成转速——电流双闭环调速系统。
1.1双闭环调速系统的结构双闭环调速系统采用转速——电流双闭环控制,其中电流调节环为系统的内环,速度调节环为外环。
将电动机监测速度与给定速度相比较,其偏差经PI调节形成电流参考值,再与实际电流相比较,经PWM调制得到占空比可调的调制波,从而调整电机电枢两端的平均电压,改变直流电动机的转速。
实现转速负反馈与电流负反馈双重控制。
1.2双闭环调速系统的设计与数学模型假设电机补偿良好,忽略电枢反应、涡流效应和磁滞,并假定励磁电流恒定,整理得到电流与电压以及电动势与电流之间的传递函数分别为:==式中:T1=L/R为电枢回路的电磁时间常数(s);IdL=TL/Cm为负载电流(A);Tm为电流拖动系统的机电时间常数(s)。
四象限变流器双闭环电流控制的研究
四象限变流器双闭环电流控制的研究摘要:介绍了四象限变流器的工作原理,并在此基础上推导出四象限变流器的数学模型。
通过四象限变流器双闭环直接电流控制的数学模型搭建了仿真框架,最后通过MATLAB/Simulink进行了仿真研究,结果表明基于双闭环直接电流控制的四象限变流器具有很好的稳态和瞬态性能,网侧功率因数接近于1。
叙词:谐波污染功率因数直接电流控制Abstract:The four-quadrant converter mathematical model is derived by its operation principle and working conditions and then the simulation is built according to its mathematical model. The simulation which is used by MATLAB/Simulink proved that double-loop direct current control is an effective way to achieve stable output DC voltage, suppress the harmonics effectively and achieve the net power factor close to 1. Keyword:Harmonic pollution, Power factor, Direct current control1 引言随着电力电子装置的广泛使用,由此引起的谐波污染问题逐渐受到了人们的重视。
整流装置是谐波主要的来源,因此有必要研制高功率因数、低谐波整流器以消除谐波源。
与传统的二极管不控整流、相控整流相比,四象限变流器具有功率因数高、直流侧电压稳定、输入电流谐波小、开关损耗小、电磁污染少等优点[3]。
四象限变流器的控制策略主要有间接电流控制和直接电流控制两种。
计算机仿真在直流双闭环调速系统教学中的应用研究
计算机仿真在直流双闭环调速系统教学中的应用研究张军;陈冲【摘要】对双闭环直流调速系统突加给定的启动过程进行了计算机仿真分析,详细给出了四种解决转速超调的控制方案,并通过实际的仿真验证。
重点介绍了内模控制在双闭环直流调速系统中的应用,并与常规PI控制相比较,使学生认识到选择合适的控制策略可以消除电机在启动过程中的转速超调现象,使系统获得良好的动静态性能。
该控制器设计思想简捷,易于实现。
【期刊名称】《林区教学》【年(卷),期】2012(000)012【总页数】3页(P81-83)【关键词】双闭环直流调速;计算机仿真,转速超调;MATLAB【作者】张军;陈冲【作者单位】盐城工学院电气工程学院,江苏盐城224051;盐城工学院电气工程学院,江苏盐城224051【正文语种】中文【中图分类】TM9211 引言传统的“电力拖动控制系统”教学一般只能从理论上进行分析,难以使用实验手段让学生获得感性的认识。
由于计算机仿真技术投资少,使用方便,简单易学,且可以模拟实际系统的运行,这就为本课程的课堂教学提供了有力的支持。
双闭环直流调速系统是一种应用非常广泛的调速系统,也是“电力拖动控制系统”课程教学的重要内容。
笔者从教学实践出发,将计算机仿真技术引入到双闭环直流调速系统的课堂教学中,一方面可以使学生对直流电机启动时转速和电流的动态过程获得一个感性的认识,另一方面可以有效地帮助学生理解并解决双闭环直流调速系统启动过程中的转速超调问题。
2 双闭环直流调速系统的组成转速—电流双闭环直流调速系统的结构如图1所示。
系统实行嵌套连接,转速调节器ASR的输出U*i作为电流调节器ACR的输入,ACR的输出Uc去控制电力电子变换器。
从闭环结构看,转速环在外面,称为外环;电流环在里面,称为内环,这就组成了转速—电流双闭环直流调速系统。
3 计算机仿真教学案例[1]直流电动机:220V,136A,1460r/min,Ce=0.132 Vmin/r,允许过载倍数λ=1.5;晶闸管装置放大系数Ks=40;电枢回路总电阻R=0.5Ω;Tl=0.03s,Tm=0.075s;β =0.05 V/A(≈10V/1.5IN)。
四象限斩波控制直流调速系统的技术研究

四象限斩波控制直流调速系统的技术研究李一鸣;荣军;邓斌;易学良【摘要】DC motor has wide speeding range and high precision, and it has very important application for the industrial fields required to speeding and braking performance. Firstly, the mathematical model of DC motor is introduces, and the three methods of its speed regulation are given, and the method of changing the armature voltage is chosen as the method of its speed regulation. Then the working principle of DC speeding system for four-quadrant chopper control is analyzed in detail, andthemodels is established based on Matlab/Simulink, and the simulation results are given. Through the analysis of simulation results, the simulation results are consistent with the theoretical analysis, and the correctness of theoretical analysis and modeling simulation of DC speed control system for the four-quadrant chopper control is verified.Finally, the advantages of DC speed control system for the four-quadrant chopper control are highlighted by comparing the simulation results with the other two kinds of chopper DC drive system.%直流电动机具有调速范围广以及调速精度高的特点,因此在要求调速和制动性能高的工业领域有非常广泛的应用。
三相双PWM四象限交流电力传动系统仿真

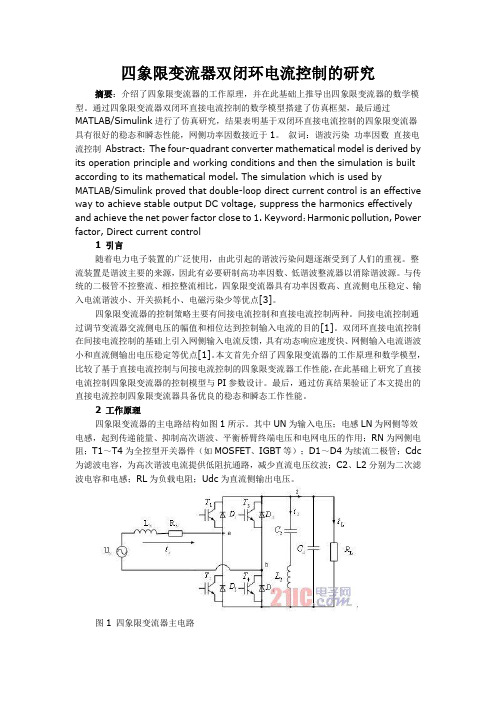
三相双PWM四象限交流电力传动系统仿真黄敏瑶;杨文焕;候甜甜;李登科【摘要】传统的功率变换器由于整流环节不可控,而存在网侧功率因数低,谐波含量高等且应用范围有限,控制系统的电机转速稳定性与精确性较差,不能四象限运行问题.文中利用Matlab建立起双PWM变换器的交流调速系统模型并进行了仿真,利用矢量控制方法让电机四象限运行.系统的动态特性和静态均较好,改善了网侧功率因数低,谐波含量高等缺点,电机的转速稳定性与精确性也较好,验证了控制策略的可用性和控制器的有效性.【期刊名称】《电子科技》【年(卷),期】2016(029)005【总页数】4页(P183-186)【关键词】PWM变换器;Matlab;交流调速;矢量控制【作者】黄敏瑶;杨文焕;候甜甜;李登科【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】TM461双PWM 变流器是由两个全控型器件为基础的电压源型变流器,背靠背连接构成,中间采用电容器做电压支撑。
该装置拥有多项优点,比如变流器两侧的无功功率可单独控制,交流侧功率因数可调,输出谐波少,直流电压可控,能量双向流动等[1],因而其应用广泛,在风力发电,柔性直流输电,变频调速等许多领域都有其重要的参与[2]。
在交流传动系统变频调速领域,传统控制策略控制性能差,尤其是参数时变、网侧和机侧独立控制、负载不确定性等增加了控制难度,交流传动系统的动、静态性能总需提高。
在此运用矢量控制对两个变流器所需实现的不同功能分别设计了控制器,并且对变流器的整流环节的控制提出了新的控制策略。
四象限交流传动系统主要由网侧PWM变流器(VSC1)、机侧PWM变流器(VSC2)、直流侧电容c等组成,通过产生SVPWM波控制变流器工作,从而产生电动机需要的三相电压。
基于PWM装置的直流电机双闭环调速系统的设计与仿真_肖诚
( 兰州交通大学, 甘肃 兰州 730070 )
摘
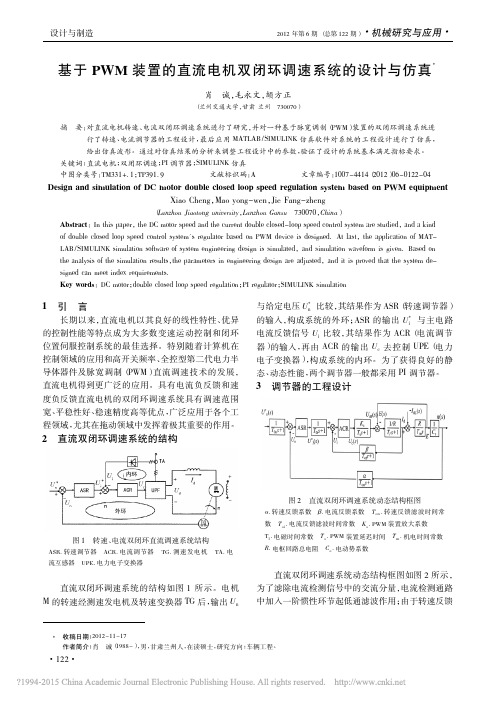
要: 对直流电机转速、 电流双闭环调速系统进行了研究, 并对一种基于脉宽调制( PWM) 装置的双闭环调速系统进 行了转速、 电流调节器的工程设计, 最后应用 MATLAB / SIMULINK 仿真软件对系统的工程设计进行了仿真, 给出仿真波形。通过对仿真结果的分析来调整工程设计中的参数, 验证了设计的系统基本满足指标要求 。
1
引
言
与给定电压 U n 比较, 其结果作为 ASR( 转速调节器)
* 的输入, 构成系统的外环; ASR 的输出 U i 与主电路 电流反馈信号 U i 比较, 其结果作为 ACR ( 电流调节 器) 的输入, 再由 ACR 的输出 U c 去控制 UPE ( 电力
*
长期以来, 直流电机以其良好的线性特性、 优异 的控制性能等特点成为大多数变速运动控制和闭环 位置伺服控制系统的最佳选择。 特别随着计算机在 控制领域的应用和高开关频率、 全控型第二代电力半 导体器件及脉宽调制 ( PWM ) 直流调速技术的发展, 直流电机得到更广泛的应用。 具有电流负反馈和速 度负反馈直流电机的双闭环调速系统具有调速范围 宽、 平稳性好、 稳速精度高等优点, 广泛应用于各个工 程领域, 尤其在拖动领域中发挥着极其重要的作用 。
* 限幅值即电流调节器的输入 U i = U i = βI dl = 0. 04ˑ1. 5 ˑ150 = 9V; 电流调节器的限幅值 U c = C e n + I dl R / K s =
( 2 ) 计算调节器参数 按照要求, 空载起动到额定转速 σ n ≤10% , 并且 取 h = 5, 则 ASR 的超 按跟随和抗扰型都较好的原则, 前时间常数为: τ n = hT ∑n = 5ˑ0. 0142s = 0. 071 ( s) 则可求得转速环开环增益: 6 h +1 KN = 2 2 = s -2 = 595. 1 ( s -2 ) 2 h T ∑n 2ˑ25ˑ0. 0142 2 于是可得 ASR 的比例系数为: ( h + 1 ) βC e T m Kn = 2 hαRT ∑n = 6ˑ0. 04ˑ0. 570ˑ0. 18 = 20. 4 2ˑ5ˑ0. 017ˑ0. 5ˑ0. 0142
双闭环控制的PWM可逆整流器的仿真与实验

调制比(m≤1)。 电压调节器 AUR 仍然采用 PI 调节
器,并考虑直流侧电容,则三相 VSR 电压外 环控制
结构如图 6 所示。 图 6 中,τν 表示电压环采样小时 间 常 数 ,Wci(s)为 电 流 环 闭 环 传 递 函 数 。
3 系统的仿真与实验 在 MATLAB/Simulink 环境下对上述系统进行仿
种:(1) 没有引入电流反馈的间接电流控制;(2)引 矢量将复平面划分为 6 个扇区,并在任一扇区内等 57
Vol.31No.05
双闭环控制的 PWM 可逆整流器的仿真与实验— ——朱一凡,等
效参考电压 矢量;2 条零矢 量均匀地分 布在每一个 PWM 开关周期中非零矢量以外的时间内,用以维持 PWM 波的基波频率不变。
1 PWM 整流器的基本原理 1.1 主电路分析
三相电压型 PWM 脉宽调制可逆整流器的主电 路如图 1 所 示 。 由 于 交 流 侧 电 感 Li(i=a,b,c)的 作 用,使电路呈升压斩波特性。 三相桥工作在脉宽调
入电流反馈的直接电流控制。 本文采用 dq 坐标变 换的电流直接控制方法,其参考值和反馈值在稳态 时均为直流信号,因此通过调节器可以实现无稳态 误差的电流跟踪控制。
AUR 同样为 PI 调节器,其传递函数为
WAUR(s)=Kνp
Tνs+1 Tνs
(12)
式中 Kνp、Tν— ——电压调节器的参数,KνI=Kνp/Tν。
电 压 外 环 的 近 似 处 理 : 由 式 (10) 可 知 ,Wci(s)≈
1 ; 考虑对系统稳定性的最大影响, 用 0.75 1+3Ts s mImcos θ 的最大比例增益 0.75 代替; 合并电压环采 样 小 时 间 常 数 τν 和 电 流 内 环 等 效 小 时 间 常 数 3Ts, 得 Teν=τν+3Ts;忽略负载电流 iL 的扰动。 综合以上分 析,电压环的简化控制结构如图 7 所示。
双极性模式下pwm逆变电路的计算机仿真
双极性模式下pwm逆变电路的计算机仿真————————————————————————————————作者:————————————————————————————————日期:《电力电子电路的计算机仿真》综合训练报告班级姓名学号专业电气工程及其自动化指导教师2011年12 月日摘要PWM控制技术是逆变电路中应用最为广泛的技术,现在大量应用的逆变电路中,绝大部分都是PWM型逆变电路.为了对PWM型逆变电路进行分析,首先建立了逆变器控制所需的电路模型,采用IGBT作为开关器件,并对单相桥式电压型逆变电路和PWM控制电路的工作原理进行了分析,运用MATLAB中的SIMULINK对电路进行了仿真,给出了最终仿真波形.关键字:双极性模式pwm逆变电路matlaB仿真目录摘要 1 一逆变电路相关概述 3 二主电路工作原理说明8 三主电路设计的详细过程10 四仿真模型的建立及各模块参数设置11 五仿真结果分析15 六总结18 七参考文献19 八体会20一概述1。
1MATLAB的介绍MATLAB (Matrix Laboratory)为美国Mathworks公司1983年首次推出的一套高性能的数值分析和计算软件,其功能不断扩充,版本不断升级,1992年推出划时代的4。
0版,1993年推出了可以配合Microsoft Windous使用的微机版,95年4.2版,97年5。
0版,99年5.3版,5。
X版无论是界面还是内容都有长足的进展,其帮助信息采用超文本格式和PDF格式,可以方便的浏览。
至2001年6月推出6。
1版,2002年6月推出6.5版,继而推出6.5.1版, 2004年7月MATLAB7和Simulink6。
0被推出,目前的最新版本为7.1版。
MATLAB将矩阵运算、数值分析、图形处理、编程技术结合在一起,为用户提供了一个强有力的科学及工程问题的分析计算和程序设计工具,它还提供了专业水平的符号计算、文字处理、可视化建模仿真和实时控制等功能,是具有全部语言功能和特征的新一代软件开发平台。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收修改稿日期:1999-12-28作者简介:李 波(1973—),男,1995年毕业于上海铁道大学电力牵引与传动控制专业,研实员,现主要从事交流传动电力机车牵引变流器控制系统的研制工作。
研究开发 四象限变流器PWM 双闭环控制系统的计算机仿真李 波(铁道部科学研究院机车车辆研究所,北京 100081)摘 要:介绍了使用SA BER 对四象限变流器P WM 双闭环控制系统进行计算机仿真的一套方法,阐述了P WM 双闭环控制原理,将部分仿真波形与实际试验波形进行了对比,表明仿真结果是可信的。
关键词:四象限变流器;脉宽调制;控制系统;计算机仿真中图分类号:T M 46;T P 391.9 文献标识码:A 文章编号:1000-128X (2000)03-0016-04Computer simulation of PWM double closed -loopcontrol system for 4-q converterLI Bo(Rolling S tock Research Institute,Ch ina Academy of Railw ay S cien ces ,Beijin g 100081,Ch ina)Abstract :A co mputer simulation met ho d using SA BER f or PW M do uble closed-loop co ntro l system for 4-q co nv ert er is intr oduced.T he pr inciple o f PW M double closed-lo op is descr par ison of so me simulat ion w avefo rms w ith measured test w avefo rms show s the simulat ion r esults are believ able .Key words :4-q conv erter ;P WM ;contr ol system ;comput er simulatio n0 引言自从70年代产生四象限变流这种独特的交直变换拓扑结构以来,四象限变流器便作为交流传动电力机车交直交传动系统的电网侧变流器,扮演着重要角色。
简言之,通过四象限变流器的控制,对电网侧,可以使电网电流波形接近于正弦,电网功率因数接近于1,最大程度地提高电网的经济效益,减少电网对周围环境的电磁污染;对直流侧,在电网电压或负载发生变化时,能够维持直流中间电压的稳定,给电机侧逆变器提供良好的工作条件。
而且,四象限变流器可以实现牵引与再生工况间快速平滑地转换。
80年代以来,随着计算机的飞速发展,计算机仿真技术已逐步深入到科研、产品开发等各个领域。
在电力电子领域,通过使用计算机仿真技术,设计者在设计阶段就能全面考察系统的动静态特性,选择合理的系统结构及参数,在最大程度上避免设计的盲目性,提高试验的一次成功率,缩短研制周期、节约研制成本。
这种利用计算机仿真技术进行辅助设计的方法已成为电力电子研究领域的发展方向。
本文介绍了使用SABER 软件对四象限变流器PWM 双闭环控制系统进行计算机仿真的过程,并给出了仿真波形及相对照的部分实际试验波形。
1 SABER 简介SABER 是美国ANALOGY 公司开发的一种可用于电力电子、自动控制、光电、电磁、机械、液压、热工等领域的计算机仿真软件。
从结构上看,它主要由3部分组成:SABER SKET CH 、SABER GUIDE 和SABER SCOPE 。
SABER SKET CH 用于以图形方式输入被仿真的系统;SABER GUIDE 把输入的系统当作一个网络,首先通过网络列表(Netlist )提取系统的结构信息,然后通过直流分析(DC Analy sis)得到系统的静态工作点,在此基础上再对系统进行时域(Time Do main)及频域(Frequency Dom ain)范围内的各种分析;当对系统完成分析计算后,便可用SABER SCOPE 观看所有变量的波形,并对波形进行各种分析运算。
SABER 的优点可概述如下:(1)SABER 秉承了模块化、自顶向下、层次化(Hierarchy)的设计思想,增强了设计的科学性,提高了设计效率。
—16—2000年第3期机 车 电 传 动№3,2000 2000年5月10日EL ECT RI C D RIV E FO R L O COM O T I VE M ay 10,2000 (2)SABER 具有丰富的模型,它的模型库中包括了电力电子、机械、液压等领域的各种常用模型。
同时,SABER 还给用户提供了一个硬件级的建模语言M AST 。
使用M AST 语言,可以方便地构造出自己的模型。
(3)SABER 提供了强大的系统分析功能。
设计者可以从各个方面对系统进行考察。
在时域方面有直流分析(DC Analysis)、瞬态分析(T ransient A nalysis)等;在频域方面有傅立叶分析(FFT )、频响分析(Small-Signal Frequency Analysis)、畸变分析(Small-Signal Distortion Analysis)等。
SABER 还可用于应力分析(Str ess Analy sis )及统计学方面的蒙特卡罗分析(M onte Carlo Analysis )。
SABER 还有一个非常实用的分析功能——参数敏感性分析(Parametr ic Sensitivity Analy sis),利用这种分析功能,设计者可以控制一个或几个参数在一定的范围内变化,观察它们对系统特性的影响,从而找出它们最合适的数值来。
(4)SABER 不仅对数模混合系统仿真得心应手,而且可以对由电力电子、电磁、机械、液压等数个不同系统构成的一个混合系统进行仿真。
这种强大的混合仿真能力其实是SABER 的最大优点。
2 四象限变流器PWM 双闭环控制原理四象限变流器PWM 双闭环控制系统的工作原理及各种参数的计算方法在文献[1]和[2]中已做了详尽论述,在此仅对四象限变流器PWM 双闭环控制原理做一简述。
四象限变流器主电路的原理电路如图1所示。
四象限变流器作为交直交传动系统中的电网侧变流器,其实质是交流电网与直流中间回路进行能量交换的中间介质。
当负载增加时,它从电网吸取更多的能量供给直流侧;当负载减小时,它将直流侧多余的能量返送给电网;当由牵引转入再生时,它使直流侧由从电网吸收能量变为向电网输送能量,反之亦然。
在对能量的这些控制过程中,四象限变流器通过PWM 双闭环控制算法来实现维持直流中间电压稳定,使电网功率因数接近于1,电网电流波形接近于正弦等控制特性。
图1 四象限变流器主回路原理电路图 图2 U =0时四象限变 流器输入回路矢量图 (U 为U →N 与I→N1的相位差角) 由四象限变流器的瞬时功率平衡公式u N i N =U d I d 可以看出,四象限变流器对能量的控制实际体现在对i N 的控制上,对U d 和功率因数的控制最终都是通过控制i N 来实现。
根据图1可画出四象限变流器输入电路矢量图(见图2)。
根据图2,可得四象限变流器输入电路矢量方程U →N =j X L I o N1+RI o N 1+U →S 1(1)……………………U →L =j X L I o N 1 U →R =R I oN1式中:I →N 1——I →N 的基波分量;U →S 1——U →S 的基波分量;ûU →S1û=K ・U d ,K 为调制比。
从图2及式(1)可以看出,在U →N 、I →N1、U →S13个量中,U →S1是控制对象,通过对U →S 1的控制可达到对I →N 1的控制。
在控制过程中只要保持矢量U →L 与U →N 的正交,就可保证电网的基波功率因数等于1。
四象限变流器PWM 双闭环控制正是基于此原理实现的。
以U d 给定值与反馈值之差作为电压调节器的输入,以U 给定值与反馈值之差作为相位调节器的输入,2个调节器的输出经PWM 调制对矢量U →S1进行控制,达到稳定U d 和保证U =0的目的,从而实现电压、相位双闭环控制。
图3为控制系统的原理框图。
图3 四象限变流器PW M 双闭环控制系统原理框图3 计算机仿真3.1 仿真系统构成整个仿真系统由主电路及控制电路构成。
主电路根据图1来构建。
交流侧使用理想交流电压源,因为进行的是系统级仿真,所以对GT O 元件做了合理简化,将其近似为理想开关。
主电路中的电阻、电感、电容器、理想开关、交流电压源等均采用SABER 提供的模型。
—17—第3期 李 波:四象限变流器PW M 双闭环控制系统的计算机仿真 图4 仿真系统结构图控制电路根据图3来构建,包括滤波器、整形、相位检测、软启动控制器、相位调节器、电压调节器、PWM 控制器、直流中间电压动态过压限制器等模块。
除滤波器采用SABER 提供的模型外,其余模块均使用MA ST 语言自己建立。
这个仿真系统充分利用了SABER 的数模混合仿真功能,达到了将四象限变流器主电路与控制电路结合起来进行仿真的目的。
整个系统的结构如图4所示。
图5 四象限变流器软启动时U d 波形(a)试验波形;(b)仿真波形负载的急剧突变有可能使四象限变流器不能及时将直流侧能量返送给交流侧,从而使直流中间电压快速上升,造成过压,对系统产生严重损害。
因此,应在直流侧加入一个保护环节——直流中间电压动态过压限制器。
当直流中间电压快速上升,四象限变流器来不及将其调回给定值时,直流中间电压动态过压限制器工作,通过斩波限压的方式,将直流中间电压限制在保护值以下,协助四象限变流器将直流中间电压调回到给定值上。
3.2 仿真策略主电路参数:u N =1200V ,给定值U d 为2600V ,系统额定输出功率为1200kW 。
在仿真过程中,用在直流侧投切电阻的方法来模拟负载的突变。
负载分3次投入,每投入1个电阻,系统输出功率升高400kW ,第3个电阻投入后,系统输出功率升为1200kW 。
然后,将3个电阻一起切除,与此同时,将一个串直流电压源、电阻和电感的支路投入,模拟由满功率牵引突然转为满功率再生的情况。
通过这些操作,可以观察直流中间电压U d 和电网电流i N 的动态响应,衡量控制系统的动态调节性能。
3.3 仿真结果3.3.1 部分仿真波形与实际试验波形的对照图5~图7将部分仿真波形与实际试验波形做了比较,从中可以看出,SABER 的仿真真实度是比较高的,仿真结果是可信的。
图6 四象限变流器软启动时i N 波形(a)试验波形;(b)仿真波形—18— 机 车 电 传 动2000年3.3.2 系统动态性能仿真结果当直流中间环节出现过压时,直流中间电压动态过压限制器将会进行限压,图8比较了有和没有直流中间电压动态过压限制器时直流中间电压的波形。