携高性能、长航时海骑兵SD
CH-46“海上骑士”运输直升机.
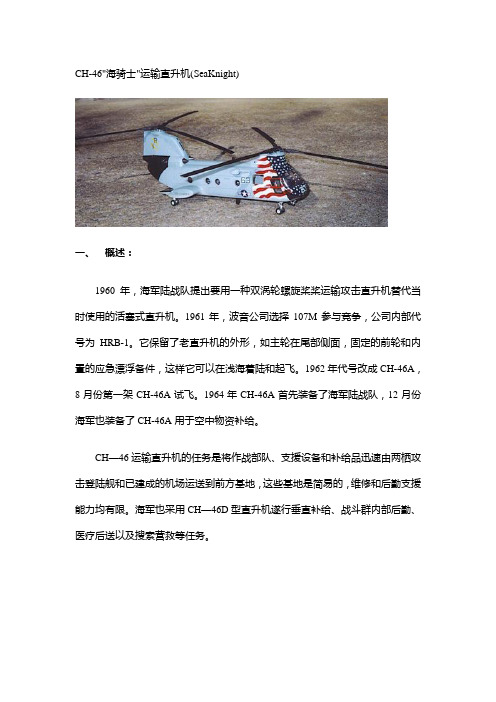
CH-46"海骑士"运输直升机(SeaKnight)一、概述:1960年,海军陆战队提出要用一种双涡轮螺旋桨桨运输攻击直升机替代当时使用的活塞式直升机。
1961年,波音公司选择107M参与竞争,公司内部代号为HRB-1。
它保留了老直升机的外形,如主轮在尾部侧面,固定的前轮和内置的应急漂浮备件,这样它可以在浅海着陆和起飞。
1962年代号改成CH-46A,8月份第一架CH-46A试飞。
1964年CH-46A首先装备了海军陆战队,12月份海军也装备了CH-46A用于空中物资补给。
CH—46运输直升机的任务是将作战部队、支援设备和补给品迅速由两栖攻击登陆舰和已建成的机场运送到前方基地,这些基地是简易的,维修和后勤支援能力均有限。
海军也采用CH—46D型直升机遂行垂直补给、战斗群内部后勤、医疗后送以及搜索营救等任务。
二、性能指标:乘员:正常4人(正副驾驶,机长,机械师),作战5人(正副驾驶,机长,两名炮手);有效载荷4540公斤或26名军人及680公斤行装;空重4868公斤;最大起飞重量:11032(公斤);机长:25.69米(旋翼展开),13.89米(旋翼折叠);机宽:15.54米(旋翼展开),4.49 米(旋翼折叠);机高:5.08米。
最大速度271公里/小时,最大爬升率8.7米/秒。
实用升限3960米。
航程175公里。
主承包商:波音伟图公司机组成员:4名具备初始作战能力的时间:1964年拥有数量:324架机长:13.7米旋翼直径:15.31米起飞重量:11032.2公斤最大速度:268.25公里/小时航程:176公里(单程)续航时间:2小时(CH-46D)1.75小时(CH—46E)武器:2门MZ(25.4毫米)或M60(70毫米)机炮(只装备CH—46E飞机)三、结构特点:(总体布局、材料、动力等)CH-46采用两副三片桨叶纵列式反向旋转旋翼,使用波音107 II型的桨叶,口型钢梁,胶接铝肋玻璃钢(刻铝)蒙皮后缘盒形结构,后缘为不锈钢条,桨叶装有力梁内部监测系统,该系统在桨叶大梁破坏前15小时可指出大梁存在裂纹。
“飞航杯”第二届全国未来飞行器设计大赛首轮晋级作品名单 (1)
第一类作品 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 序号
第二类作品 临
第三类作品 未来飞
1 2 3 4 5 6 7 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
第六类作品 飞行器关键技
国未来飞行器设计大赛首轮晋级作品名单
一类作品 空天飞行器设计 参赛单位 301所 西北工业大学 西北工业大学 西北工业大学 西北工业大学 清华大学 清华大学 南京航空航天大学 南京航空航天大学 哈尔滨工业大学 哈尔滨工业大学 国防科技大学 北京理工大学
类作品 临近空间飞行器设计 参赛单位 西北工业大学 西北工业大学 西北工业大学 西北工业大学 西北工业大学 西北工业大学 南京航空航天大学 南京航空航天大学 南京航空航天大学 南京航空航天大学 三部 哈尔滨工业大学 哈尔滨工业大学
第六类作品 飞行
“飞航杯”第二届全国未来飞行器设
作品名称 未来天地往返运输系统 天狼号多任务空天飞机 天基对地打击系统 猎鹰空天飞行器 “凌霄者”空天变体无人飞行器 “夸父”号金星探测器——基于太阳能热驱动的长久驻留大气层飞行器 “流星1号”高超声速飞行器 “先驱者”空天无人机 “天剑”单级入轨飞行器 新型混合动力空天飞机 “云帆”空天运载/防御通用平台 “流明”月空飞行器 全球空天运输变体飞行器 作品名称 “渊虹”临近空间飞艇 浮萍号飞艇 多用途亚轨道高超声速飞行器“风暴”号 “羲和”大型临近空间侦查打击一体化飞艇 "天空之眼"侦察型太阳能无人机 “利剑”临近空间高超声速无人平台 “虬龙”大型地效航空平台 “星陨”高超声速轰炸机 “猛隼”无人飞行器 “临龙盾” 近空间防御武器平台 “晨曦号”多功能长航时临近空间飞行器 新概念平流层侦查及攻击作战平台设计 “苍穹”临近空间悬浮平台 作品名称
海上常用直升机型号及参数
海上常用直升机型号及参数海上常用直升机型号及参数是指那些经常在海上执行任务的直升机。
这些直升机具有适应海上环境、满足特殊任务需求的特点。
本文将从直升机的类型、参数及其在海上的应用等方面进行介绍。
首先,海上常用直升机可以分为多种类型,包括通用型、搜索救援型、反潜型和武装型等。
通用型直升机主要用于物资运输、人员转移和医疗救援等任务。
搜索救援型直升机则专门用于海上搜救行动,具有良好的悬停稳定性和较长的航程。
反潜型直升机则用于海上反潜巡逻和侦查任务,其具备良好的隐蔽性和潜水深度适应性。
而武装型直升机则具备攻击和火力支援能力,主要用于海上战斗和打击任务。
接下来,我们将逐一介绍海上常用直升机的参数及特点。
首先是通用型直升机。
这类直升机通常具有较大的载荷能力和长航程,以满足海上物资运输、人员转移和医疗救援等任务需求。
其中一种常用型号是美国的Sikorsky S-92。
Sikorsky S-92是一种中型通用直升机,具有双发动机、双主旋翼设计,以及先进的自动飞行控制系统。
它可以携带16至19名乘客,飞行速度可达到280千米/小时,最大航程超过1000千米。
搜索救援型直升机是执行海上搜救任务的关键工具。
其中一种常用型号是法国的欧洲直升机公司(Airbus Helicopters)H225直升机。
H225是一种大型直升机,可携带多达24名乘客,并具备长达858千米的航程。
该型号具有先进的搜索雷达和红外传感器,可以在恶劣的天气条件下执行搜救任务。
反潜型直升机则具备海上反潜任务的能力。
其中一种常用型号是美国的Sikorsky SH-60直升机。
SH-60是一种中型双引擎直升机,它可以携带多种反潜武器和传感器,包括声纳、磁强计和雷达等。
SH-60具备优秀的机动性和航速性能,能够在海上巡逻并寻找潜在的潜艇威胁。
最后是武装型直升机,它们主要用于海上战斗和打击任务。
其中一种常用型号是美国的AH-64“阿帕奇”直升机。
AH-64具备强大的火力和防护能力,可以携带各类导弹、火箭弹和机关炮等武器系统。
海上、陆地应急搜救装备大全
海上、陆地应急搜救装备大全一、通用装备(1)固定翼救援飞机:其特点有一是速度快。
目前喷射客机的巡航时速在900千米/小时左右。
二是机动性高。
固定翼机飞行不受高山、河流、沙漠、海洋的阻隔,而且可根据客、货源数量随时增加班次。
三是安全舒适。
(2)旋翼救援飞机:直升机救援是把直升机应用于应急救援(空中120),能更快速到达水、陆路不可通达的作业现场,实施搜索救援、物资运送、空中指挥等工作,是世界上许多国家普遍采用的最有效的应急救援。
(3)搜索救援无人机:搜索者”(Searcher) Mk II系统是一种操作中、先进的第四代无人机(UAV)系统,起源于第三代最初的“搜索者”(Searcher)。
“搜索者”(Searcher)Mk2的制造去符合现在和未来挑战。
它具有极好的发动机和空气动力学性能,优异的部署和操作品质和一个新的先进通用无人机(UAV)任务地面管制中心,与所有的马拉特(Malat)系统兼容。
两种“搜索者”(Searcher)系统都在操作使用中。
(4)高分辨率卫星:救援卫星是一种用来营救失事飞机和船舶的人造卫星。
迄今在天上运行的救援卫星有四颗,俄罗斯,美国、加拿大、英国、法国和挪威等国设有十一个地面接收站,形成了一个国际卫星营救系统。
这个系统能在四小时内,把地球上每一个角落搜索一遍。
长期以来,遇难的飞机、船只通过无线电发出。
国际通用的“SOS”信号呼救来争取救援,但由于受到地域、时间和干扰等限制,海、空失事仍然难以得到及时营救。
搜索营救卫星运行在850~1000公里高的近圆形极轨道上,可以接收来自直径约5000公里广大地区内任何地方发出的呼救信号。
卫星绕地球一周只需102~105分钟,所以不仅搜索范围大,而且发现目标快。
1982年9月9日首次利用卫星成功地发现和救援了加拿大的空难遇险者西姆和他的两个朋友。
此后搜索营救卫星不断发现失事的飞机和轮船,到1983年底已在全世界拯救了120多名遇难者。
(5)运输机:运输机是一种用于空运兵员、武器装备、并能空投伞兵和军用装备的军用飞机、武器装备和其他军用物资的飞机,也可用投降作战。
海陆协同化智能FPSO“海洋石油123”

1312023年·第4期·总第205期船型介绍海陆协同化智能FPSO“海洋石油123”海陆协同化智能FPSO“海洋石油123”“海洋石油123”是由中国船舶及海洋工程设计研究院(MARIC)设计、中海油能源发展有限公司投资建造、招商局重工(江苏)有限公司承建的全新智能FPSO,已于2023年6月16日在江苏南通成功交付,目前已拖航至珠江口盆地海域的陆丰12-3油田,预计2023年下半年投产。
“海洋石油123”为10万吨级非自航、双壳双底FPSO,采用内转塔式单点系泊系统定位,作业水深约236…m,设计寿命30年,并可15年不进坞。
“海洋石油123”的主要参数见表1。
“海洋石油123”主要设计亮点■ 智能化、数字化“海洋石油123”集齐了七大智能符号——全船监测系统、智能照明系统、智能装配载系统、生活楼防疫系统、工艺流程数字孪生系统、化学药剂智能加注系统、边缘数据中心,在传统FPSO基础上研发了智能管理平台,打通了多个智能管理模块之间的数据壁垒,实现了作业人员工作效率及设备精细化管理大幅提升,引领FPSO进入智能化生产运营的新阶段。
■ 低碳、节能、环保“海洋石油123”FPSO配置了1套烟气模式惰气系统,回收利用热介质锅炉燃烧的尾气用于大舱所需的惰气覆盖气,能够有效减少惰气发生器的柴油消耗,进而降低FPSO的整体能源消耗。
另外,“海洋石油123”FPSO还配置了四台余热利用锅炉,单台功率为1…500…kW,正常生产期间利用余热锅炉就能满足FPSO 所需的热能。
上述两套系统每年可节约标准煤逾4…429…t,减少CO2排放约11…168…t,相当于植树6…120棵。
“海洋石油123”是我国首个统一批量应用满足国标二级能效电机的FPSO,相比以前的三级能效电机,效率提升3%左右,每年将节电125…700…kW·h。
1321332023年·第4期·总第205期船型介绍海陆协同化智能FPSO“海洋石油123”■ 海陆协同运营模式…“海洋石油123”安装了近百个智能摄像头,配备了8…000余个数据自动采集点,采集频率达每秒…1次,每年可产生60…GB数据。
以色列军用无人机发展概览_吴思亮
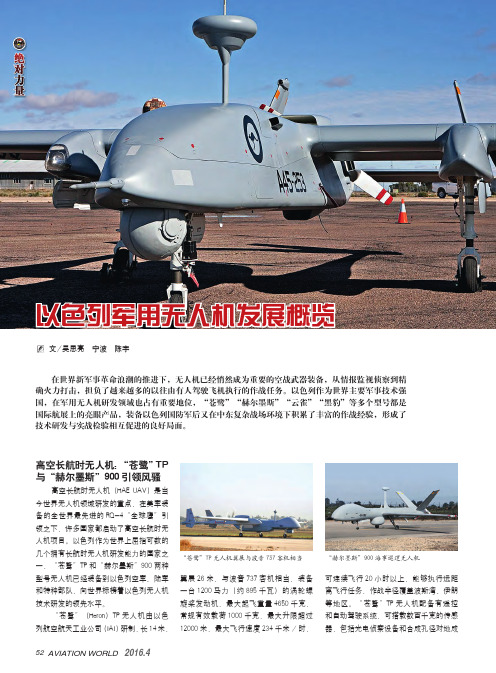
绝以色列军用无人机发展概览翼展26米,与波音737客机相当,装备一台1200马力(约895千瓦)的涡轮螺旋桨发动机,最大起飞重量4650千克,常规有效载荷1000千克,最大升限超过12000米,最大飞行速度234千米/时,“苍鹭”TP 无人机翼展与波音737客机相当“赫尔墨斯”900海事巡逻无人机对力量可连续飞行20小时以上,能够执行远距离飞行任务,作战半径覆盖波斯湾、伊朗等地区。
“苍鹭”TP 无人机配备有遥控和自动驾驶系统,可搭载数百千克的传感器,包括光电侦察设备和合成孔径对地成绝对力量2016.4 AVIATION WORLD 53像雷达,还配置了多种电子信号侦测天线,能够执行情报监视目标定位侦察(ISTAR)、电子干扰、导弹武器中继制导或通信中继等任务。
“苍鹭”无人机2007年下半年米/时,续航时间2小时。
经过多年发展,该机型已经形成了小型无人机家族,是以军目前主要的服役型号,也是世界上最早投入实战运用的迷你无人机。
2008年,以色列国防军与埃尔比特系统公司签订5000万美元的合同,生产100架“云雀”I 长航时无人机(I-LE),2011年“云雀”I-LE 装由一个高级地面控制站操控,具有自动跟踪和机动探测能力,2架无人机可相距40“赫尔墨斯”900海事巡逻无人机赫尔墨斯”900无人机在2015年巴黎航展期间试飞副本“云雀”I 长航时无人机以军士兵发射“云雀”I-LEX 无人机“苍鹭”TP 无人机机身下方安装的M-19HD 多传感器系统绝对力量54 AVIATION WORLD 2016.4Malat 分部也启动了迷你无人机研发的评估计划,认为当前和未来10年内无人机的作战需求仍将稳步增加,因此公司决定以开发完全新型的无人系统和升级现有平台两种方案,满足以色列国防军对小型无“黑豹”(Panther)小型无人机是以色列公开的另一种垂直起降型无人机。
该机装备3台电动机,一台位于机身尾部提供升力,两台位于机翼根部,小型燃料电池提供动力,发动机、螺旋桨连同翼根部“赫尔墨斯”900由以色列埃尔比特系统公司研发“黑豹”小型无人机可连续飞行6小时“黑豹”小型无人机参加2013年AUSR 航展UVi s i o n 公司推出的新型勇士30巡飞弹药发射车以色列“勇士30”巡飞弹药绝对力量2016.4 AVIATION WORLD 55杀无人机“哈洛普”(Harop)。
“游骑兵”燃料电池动力多旋翼无人机

精 品推介 _Product Express
CY-C!太 阳能无 人船采 用太 阳能动 力,可获得长 久 续 航 能 力 , 具 有 长 久 航 行 和 机 动 探 测 能 力Байду номын сангаас,CY-C1 能 够 获 取 海 面 气 象 要 素 和 大 气 廓 线 资 料 , 该 装 置 作 为 浮 标 . 【作 时 , 可 自 动 到 达 探 测 位 置 , 无 需 释 放 船 舶 和 定 位 锚 系 。
口 N O.07 T20fa1I62.5037 l
未来无 人船在安 防市场 ,如港 口护卫 、传感器部署 、 收集情 报、监视侦察 、后勤 支援 等方面都有巨大潜 力。 在 海 洋 地 形 测 绘 、 资 源 勘 探 、 环 境 监 测 的 自动 化 作 业 方 面 更 是 具 有 不 可 忽 视 的 优 势 和 潜 能 , 可 以 长 时 间 进 行 海 洋 监 察 和 深 海 危 险 区 的 搜 寻 搜 救 工 作 。
CY-Cl太 阳 能 无 人 船 最 大 航 时 为 365天 , 活 动 半 径 可 达 2500krn, 巡 航 速 度 为 3-5m/s,5级 海 况 下 可 连 续 测 量 海 面 气 温 、 气 压 、 湿 度 、 风 速 、 风 向 以及 海 温 等 要 素 , 可通 过 陆 基 子 系 统 进 行 实 时 监 视 和 接 收 处 理 与 分 发 数据 。
三和航空S50“小旋风”无人机亮相,飞行性能稳定获观众好评
三和航空S50“小旋风”无人机亮相,飞行性能稳定获
观众好评
近日,在尖兵之翼--第九届中国无人机大会暨展览会上,三和航空自主研发生产的S50“小旋风”无人机和“天眼”垂直起降复合翼无人机共同亮相展会。
其实在12号当天,三和“小旋风”无人机植保机就已经进行负载40kg在当天5级风力的情况下试飞演示,凭借稳定的飞行性能获得现场观众的热烈掌声。
三和植保机飞行展演
现场观众咨询
6月12日下午,在天津滨海新区天津港保税区临港区域无人机产业园,三和航空携S50“小旋风”无人机参加了飞行展演活动,通过飞行实战证实了公司自主研发的横列双旋翼无人直升机的长航时和大载重的优越性能,在飞行展演现场便受到了无人机行业专家的一致好评,同时,S50“小旋风”无人机的飞行展演还获得了由尖兵之翼组委会颁发的飞行展演奖牌。
三和航空展位。
中国首款大型反潜巡逻机问世 跻身世界六强
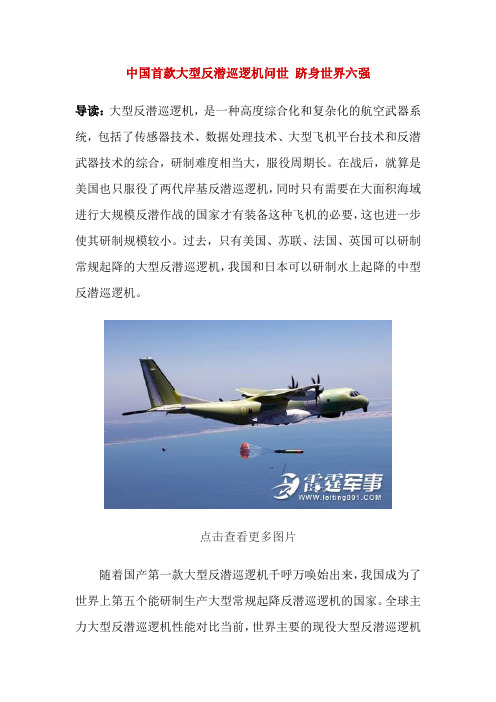
中国首款大型反潜巡逻机问世跻身世界六强导读:大型反潜巡逻机,是一种高度综合化和复杂化的航空武器系统,包括了传感器技术、数据处理技术、大型飞机平台技术和反潜武器技术的综合,研制难度相当大,服役周期长。
在战后,就算是美国也只服役了两代岸基反潜巡逻机,同时只有需要在大面积海域进行大规模反潜作战的国家才有装备这种飞机的必要,这也进一步使其研制规模较小。
过去,只有美国、苏联、法国、英国可以研制常规起降的大型反潜巡逻机,我国和日本可以研制水上起降的中型反潜巡逻机。
点击查看更多图片随着国产第一款大型反潜巡逻机千呼万唤始出来,我国成为了世界上第五个能研制生产大型常规起降反潜巡逻机的国家。
全球主力大型反潜巡逻机性能对比当前,世界主要的现役大型反潜巡逻机包括美国P-3C“猎户座”和P-8A“海神”、日本的P-1反潜机、法国“大西洋”ATLZ、英国HS-801“猎迷”、苏联的图-142和伊尔-38,以及我国新研制成功的“高新6号”。
其中一些飞机的时间发展跨度长达50年,但是技术基础都较为类似。
美国的P-3C是生产和服役规模最大的反潜机,而伊尔-38则是生产规模仅次干P-3C的机型。
这两种都和“高新6号”一样是基于4发中型运输机平台研制,其相似度大于其他飞机。
点击查看更多图片潜艇是以"幽灵"杀手而著称于世,它能够隐蔽于大洋深处,随时可以给对手以毁灭性的打击。
反潜也就成了各国海军目前最需要解决又最难解决的一个问题。
现代海战或者海上运输,甚至海上巡逻机都将随时受到潜艇的打击。
一旦海上战争爆发,反潜已经是各国海军主要作战目标之一。
由于潜艇的水下机动性强,海底背景复杂,给反潜的准确定位和连续追踪造成了很大的困难。
航空反潜战是反潜飞机利用反潜探测设备对水下潜艇目标进行探测、识别和定位,并利用反潜武器实施攻击的作战行动,是现代反潜战的一个重要组成部分。
航空反潜的主要优点是:反潜飞机速度快、航程远、载弹量大,机动灵活;反潜作战覆盖海域宽广,搜潜和反潜效率高;不易被水下潜艇发现和攻击,可对其实施快速攻击。
Shoei 安全帽專用重機藍牙通訊系統 SRL2 用戶指南说明书

Shoei 安全帽專用重機藍牙通訊系統
用戶指南
SRL2
警告
為了讓嚴重體傷、死亡或產品受損的風險降至最低,在第一次使用本產品前請閱讀使用者指南或是快速上手指南。當您的手冊遺失或是無 法閱讀時,請至 取得這些指南的電子版,保留它們做為未來的參考。
8 GPS導航儀....................................................................................... 24 9 SENA SR10,雙向無線電轉接器........................................................... 25 10 FM收音機......................................................................................... 26
The Bluetooth®之文字與商標為Bluetooth SIG, Inc.所擁有,Sena是經過授權使用這些標誌;iPhone、iPod touch是Apple Inc.的註冊商 標;Zumo™是Garmin Ltd. 或其子公司的註冊商標;TomTom™是TomTom International B.V.的商標或註冊商標;其它提及之商標商品 名稱均分屬各該擁有者所有。
Shoei®是Shoei Co., Ltd的註冊商標,並在全資子公司Shoei Safety Helmet Corp.的允許下使用此商標。Shoei的產品名稱是Shoei的商 標或註冊商標。Sena Technologies,Inc. “( Sena”) 不隸屬於Shoei Co., Ltd.。用於Shoei Neotec II的Sena SRL機車藍牙通信系統和用 於Shoei頭盔的Sena SRL2機車藍牙通信系統是由Sena Technologies, Inc. 為Shoei®頭盔專樂....................................................................................... 23 7.1 透過藍牙無線立體聲.............................................................................................. 23 7.2 音樂分享............................................................................................................... 24 7.3 智慧音量控制 (預設:關閉)..................................................................................... 24
美国海军MQ-4C海军侦察机

美国海军MQ-4C Triton“海神”长航时无人巡逻机揭幕6月14日,在加州Northrop Grumman公司的工厂,无人家族家族迎来了一个新成员——MQ-4C,美国海军的广域海上监视(BAMS)无人机系统(UAS)。
“去年,我们自豪地庆祝了美国海军航空兵的百年诞辰,今年我们已经看到了一个新的巡逻飞机的推出,现在,一个我们倡导的海上广域敬爱那时体系BAMS正在逐步构建”海军副作战部长,上将马克•弗格森在揭幕发言。
“BAMS的非常适合满足海洋环境的要求,给我们作战优势,我们将在未来刷新历史,为美国海军航空兵的第二个百年历程树立一个一个里程碑。
”虽然发展自“全球鹰”,但MQ-4C的正式绰号为Triton(希腊神话中一种鱼身海神),由诺斯罗普•格鲁门公司开发,历时4年多。
Triton 将作为海军的海上巡逻和侦察部队家族的一部分,尤其形成和P-8A 海神巡逻机的良好互补。
“看到我们的劳动成果,经过4年的辛勤工作和奉献这一计划来实现,这是一个惊人的事件”海军长航时海上无人驾驶飞机系统计划办公室项目经理(PMA-262)上尉詹姆斯•霍克说“我们期待着继续测试和评价,部件装配和安装和减少风险的雷达测试。
”为TRITON计划的下一步骤,包括继续测试,功能要求审查和首次飞行系统的开发和示范(SDD-1)飞机。
的SDD-2会跟在别人后面的SDD-1的几个月。
MQ-4C的飞行器,翼展130.9英尺(40米),是基于美国空军的RQ-4B“全球鹰”开发而成,部分基于组件和系统已经在国防部的组织下进行了试飞。
Triton的新功能包括多功能AN/ZPY-3有源传感器(MFAS)雷达系统,这是Triton的主要传感器。
该雷达已经提前装在一架Gulfstream湾流飞机上,在2011年12月进行了首次试飞。
MFAS雷达的能力,能够让Triton在一个飞行任务中监视超过270万平方英里的范围。
Triton的能力,就是提供航程2000海里的持久情报,监视和侦察。
红色警戒3资料

“呵呵,你在这里。
我是未来科技公司的首席执行官凯丽.威佛,我们欢迎你的到来。
战斗控制终于上线,一切都已经准备就绪。
我们取得了世界三大强权的全部军事科技,包括他们的步兵、载具还有建筑。
现在,它们任凭你差遣,但是我还是希望你能首先好好了解一下这些玩意儿。
下面是我们公司的核心科技资料档案,它是由我们的科技人员在世界大战期间冒着生命危险于每一场战役结束后亲临战场,收集各种残骸科技并加以分析,最终编撰得到。
凭着这份档案,我们的研发成果相较于世界上其他最先进的军事研究机构也至少拥有百年以上的优势,这可不是鼓吹的。
我们根据你所熟知的语言编译了这份档案,希望你能好好地阅览,以便掌握使用这些军备所需的必要知识。
这档案的绝密程度是不言而喻的,我们坚信你不会做出任何商业泄密,否则,结果是我们都不愿意看到的。
等你学习完以后,我们会给你传达最新的任务…当然,三大阵营的全部军备可以由你任意选择,随心所欲地使用。
这并不代表我们的任务会很简单,只有世界上最顶级的指挥官才能游刃有余地驾驭三大阵营的不同军备力量,在平均时间以内完成我们的任务。
如果你可以完成我们的全部任务,届时,我们会为你准备特别的东西。
不要害羞,现在就阅览这份档案,你若准备好了,就来找我,祝猎杀愉快,指挥官。
”——红色警戒3起义时刻正式上线苏联盟军战熊警犬征召兵维和步兵防空部队标枪兵战斗工兵工程师磁暴部队间谍化学部队冷冻军团火炮机车(资料暂缺)谭雅娜塔莎盟军探矿车苏联探矿车激流ACV牛蛙载具多功能步兵战斗车镰刀机甲守护者坦克铁锤坦克雅典娜炮收割机甲幻影坦克恐怖机器人平定者V4火箭发射车未来坦克X-1天启坦克海豚粉碎者(资料暂缺)水翼船磁暴快艇突袭驱逐舰阿库拉潜艇航空母舰无畏级战舰阿波罗战机米格战机维和轰炸机双刃直升机冰冻直升机基洛夫飞船世纪轰炸机哨兵枪先锋武装战艇机高射炮多功能步兵炮塔磁暴线圈电磁波塔铁幕装置超时空传送仪真空内爆弹质子撞击炮苏维埃社会主义联盟步兵1、战熊训练价格:$225特殊:1)两栖,战熊天生就会游水,只是不那么敏捷。
AIS系统介绍
什么是AIS船舶自动识别系统(Automatic Identification System, 简称AIS)是一种新型的助航设备。
AIS基本功能是:将本船和他船的精确船位、航向、航速(矢量线)、转向速度和最近船舶会遇距离等动态信息和船名、呼号、船型、船长与船宽等静态信息通过VHF 自动、定时播发,在VHF覆盖范围内(20海里)装备AIS设备的船舶,可自动接收到这些信息。
两段信息之间的时间间隔,将随着船速的增加而自动减少,如果船舶正在做机动航行,信息间隔则进一步减少。
例如,当船舶停港或抛锚时信息间隔为数分钟,船舶在高速行驶时,信息间隔为两秒。
由于这种特性,AIS将为船舶提供一种有效的避碰措施,并极大地增强雷达功能。
而且,由于安装AIS的船舶的航行信息都是在“空中”传播,因此当地VTS 站也可以收到。
为处理AIS信息,VTS只需配有AIS基站,操作员无须逐个查询船舶,利用AIS就可以获得所有装有AIS船舶的完整的交通动态。
由于 AIS完全独立于雷达,也就是说,基于AIS的VTS无须安装雷达,因此,AIS技术对VTS操作的长期作用,其效果不可估量。
AIS使用海上移动VHF波段交换数据,所以AIS设备的成本相对于雷达设备要低,然而它的“可视”范围却几乎等于雷达。
研制AIS的起因和背景VTS、ARPA雷达的长足发展通过岸基雷达搜集目标信号的船舶港口交通管理系统被称为VTS,通过船基雷达搜集目标信号并显示目标的航向、航速以及能模拟避碰的雷达被称为ARPA避碰雷达。
二十世纪七、八十年代,是VTS、ARPA雷达长足发展的黄金时期,几乎全球的所有的港口都安装了VTS,全部的远航船舶都安装了ARPA雷达。
从1978年到1999年的21年间,我国就建造了20个不同规模、不同类型的VTS站(不包括台湾)。
VTS、ARPA雷达比以前的同类产品的性能的确提高了一大步,一时被人们用完美无缺来形容。
随着航海事业的发展和人们航海通信导航仪器的要求提高,VTS和ARPA雷达无法直接标识目标的问题就突出了。
海德威将携新产品亮相
( 图 为 海洋 卫 士TM压载 水 处 理 系 统在 为 天 津海 洋 石 油 工 程股 份 有 此 限公 司 半潜 船 上 的 布 置 图 )
截 止 到 目前 为 止 , 海 洋 卫 士 T 压 载 水 处 理 系 统 的 安 装 M
应用 及订 单 已经涵 盖 了集装箱 船 、散货 船 、科考 船 、多用
2 0 技术 国 内领先 ,拥 有先进 的航迹 控制 与 自适 应 能力 , 0, 经 过 长达 2 的 实船 测 试 ,稳 定性 极 为可 靠 , 目前 已获得 年
C S 书 , 并部 分获 得 了G 认 证 ,预 计 1 , 得最 终 获得 C证 L O9获
G 型式认 可证 书 。 L
仅运 行成 本低 ,而 且对 船舶供 电系统没 有要 求 ,无 需额外
增 加 发 动 机 组 容 量 或 数 量 , 从 而 最 大 限 度 地 节 约 了 安 装 的 附 加成本 。
监控 管理 系统 )产 品 ,为专业 的船 岸 管理 系统 ,实现 了远 洋 船舶 与岸 端 的实 时监控 、通 信 与信 息管 理 ,在 众多 大型 船 队得 以使用 ,极 大的提 高 了船 队管理 的效率 。
今 年 , 海 兰 信 将 在 广 州 国 际 海 事 展 (展 位 号 : 1 5 J 重 点 推 出 其 船 舶 操 舵 控 制 系 统 ( 自动 舵 单 元 D1 上 1 含 模 块 )与 电子海 图系 统 。旗 下 船舶 操 舵 控 制 系 统H D S L —C
北 京海 兰信 推 出新型 船 舶 操 舵控 制 系统 与 电子 海 图系 统产 品
北京 海兰 信数 据科 技股 份有 限公 司 ( 票代 号 : 股 3 0 6 )长期 专注 于航海 电子行 业 , 以不 断推动 航海 的安 0 05
船速表 深度声纳用户手册 - 汉克 法里亚说明书
Digital Speedometer with Analog Appearance Digital displays forDepth in Feet, Meter, or Fathoms Shallow or Deep Water Alarms Alarms are Audible and Visual Programmable Keel Offset Trip LogMIS0163B ECR#8583 11/2011SystemCheck ® Commander ™Speedometer/ Depth SounderOwner’s Manual™, ® are trade marks of Bombardier Motor Corporation of America or it’s affiliates.© 2003 Thomas G. Faria Corporation. All rights reserved. Reprinted with permission.InstallationTwo Wire Connector Page 1Four Wire Connector Page 1Figure 1 Installation Diagram Page 1Operation2Speedometer Page DescriptionTrip Log Page 23Reset Page Units Page 3Depth Sounder Page 3Shallow Alarm Page 4Deep Alarm Page 4Keel Offset Page 4Units Page 4Loss of Signal Page 55Calibration Page Figure 2 Speedometer LCD Display Modes Page 6Quick Reference GuideSet-Up Mode Page 6Speedometer Scale Selection Page 7Figure 3 Set- Up Mode Page 7Quick Reference GuideFigure 4 - HN0353, 4 Wire Connection Wire Diagram Page 8Figure 5 - HN0357, 2 Wire Connection Wire Diagram Page 9Use with:SystemCheck® Commander™ Speedometer with Depth Sounder Installation:CAUTION: Disconnect the battery during installation. Tighten nuts on the backclamp only slightly more than you can tighten with your fingers. S ix inch-pounds of torque are sufficient. Over-tightening could result in damage to the instrument and may void your warranty. Mounting1. Cut a 3-3/8” diameter hole in the dash and mount the gauge with the backclamp supplied.The butt connectors have a heat activated waterproofing. Once the butt connections have been crimped, slowly apply heat with a heat gun until you see sealant coming out of the connector ends. It is recommended to wrap the connections together with electrical tape for further protection.Two Wire Connector SocketFollow the wiring diagram at the end of this manual for wiring connections. (See Diagram HN0357, Figure 4, page 8).Four Wire Connector Socket Connections for Speed input, Ignition and Ground. Follow the wiring diagram at the end of this manual for wiring connections. (See Diagram HN0353, Figure 5, page 9).Page 1OperationSpeedometerThe speedometer is a digital instrument with the appearance of an analog instrument. The speedometer is designed to be operated from a “paddle wheel” sensor. A microprocessor controlled stepper motor moves the pointer to display boat speed using a linear dial.The microprocessor and stepper motor provide excellent accuracy. Variations in the operation of the “paddle wheel” sensorare however fairly common. These variations may be caused by the mounting location of the “paddle wheel” on the hull,which affects water flow characteristics, or turbulence and air bubbles in the area ofthe “paddle wheel”. Therefore, calibration of the speedometer may be required and is easily accomplished by using the Trip Log display or the pointer.DescriptionThe SystemCheck® Commander™Speedometer has three push buttons;The “Mode” button is used to change the function of the LCD display and to access sub menus and adjustable settings. The “Down” and “Up” buttons are used to modify the settings.In normal operation mode, pressing the “Mode” button for a short period of time causes the display to cycle between the Depth Sounder display and the Trip Logdisplay. Pressing and holding the “Mode” button causes the display to change to the “settings” sub menus (see Figure 2, page 6).When the settings menus have been selected, pressing the “Mode” button for a short period of time causes the display to cycle through the setting options. Withineach setting selection, pressing the “Down” and “Up” buttons causes the affected setting to change. Themicroprocessor will automatically record the new settings as you adjust them.When in a setting menu, pressing andholding the “Mode” button returns to themain function.Trip LogThe Trip Log is similar to the trip odometer in an automobile. The distancetraveled, as recorded by the speedometer “paddle wheel”, is displayed.The Trip Log may be reset to zero, theunits of measure changed, or theMode ButtonPage 2MilesNautical Milescalibration adjusted using the sub menus. Pressing and holding the “Mode” button while the Trip Log is displayed will change the display to the “settings” menu (see Figure 2, page 6).Trip Log “Settings” MenuThere are three items in the Trip Log “Settings” Menu: Reset, Units, andCalibration. Briefly pressing the “Mode” button cycles through the menu items.The microprocessor will automatically record the new settings as you adjust them.ResetPressing the “Up” and “Down” button resets the Trip Log to zero.UnitsPressing the “Up” or “Down” button cycles the units of measurement for the Trip Log between miles (MI) and nauticalmiles (NM).Calibration This menu item is used to simultaneously adjust the calibration of the Speedometer and the Trip Log. Two methods of calibration are possible. These methods will discussed in the Calibration Section.Depth SounderThe Depth Sounder displays the depth of the water under the boat.The depth can be displayed in feet, meters, or fathoms. Audible and visual alarms can be set to warn of shallow or deep water conditions. A “keel offset” setting allows the operator to adjust for the difference in the location of the Depth Sounder transducer compared to the deepest part of the boat’s hull. The various settings are accessed by pressing and holding the “Mode” button while the Depth Sounder is displayed (see Figure 2, page 6).Page 3Lowest part of boat.Transducer= -Keel offset Depth Sounder “Settings” MenuThere are four items in the Depth Sounder“Settings” Menu: Shallow Alarm, DeepAlarm, K eel Offset, and Units. Brieflypressing the “Mode” button cyclesthrough the menu items.The microprocessor will automaticallyrecord the new settings as you adjustthem.Shallow AlarmPressing the “Up” or “Down” buttonchanges the setting for the Shallow Alarm.Setting the Shallow Alarm to zero turnsoff the alarm. To have this alarm indicatethe depth of water under the deepest partof the hull, the K eel Offset must beproperly set.Deep AlarmPressing the “Up” or “Down” buttonchanges the setting for the Deep Alarm.Setting the Deep Alarm to zero turns offthe alarm.Keel OffsetPressing the “Up” or “Down” buttonchanges the setting for the Keel Offset.Negative numbers indicate that the DepthSounder transducer is located ABOVE thedeepest part of the hull (typical). Allowfor worst case boat loading whenadjusting the K eel Offset as this settingaffects the Shallow Alarm.UnitsPressing the “Up” or “Down” buttoncycles the units of measurement for theDepth Sounder betweenPage 4feet (FT),meters (m),and fathoms (FA).Loss of SignalWhen the Commander™ looses signal fromthe transducer, the LCD display will flash the following;CalibrationSpeedometer / Distance TraveledCalibration is done in the Trip Log “settings menu”. (See Figure 2)CalibratePress the “Mode” button to display the Trip Log.Quickly press the “Mode” button three (3) times to select and enter the Calibrate “settings menu”.There are two methods of calibration;1) A GPS or radar gun can be used to obtain a fixed speed. While holding the boat at the selected speed press the “Up” or “Down” buttons to adjust the speedometer pointer reading to match the GPS or radar gun indicated speed.2) The Trip Log can be set to zero and then a course of known distance run, such as between two buoys or by using a GPS. At the end of the run access the Calibration menu item.Press the “Up” or “Down” buttons to adjust the recorded Trip Log distance to match the known distance. This will calibrate both Trip Log and the Speedometer.Page 5-Page 6Quick Reference GuideSpeedometer LCD Display Modes Figure 2Setup ModeThe speedometer full scale deflection setting can be changed using the Setup Mode (see Figure 1). Use this option only if you have reason to believe that your setting is wrong. Setting an incorrectvalue in this menu can result in extremelyinaccurate performance of the speedometer. To access the Setup Mode, press and hold both the “Up” and “Down” buttons while turning on the instrument.The display will show “*SETUP*”.Briefly pressing the “Mode” button will change the display to the setting menu. The “Up” and “Down” buttons are used to modify the setting.Page 7Quick Reference GuideSet-Up ModeFigure 3The microprocessor will automatically record the new setting as you modify it.Pressing and holding the “Mode” button sets the instrument to normal operation.Speedometer Full Scale SelectionRefer to Figure 3 (below) for anexplanation of each of the speedometerfull scale selections.This is normally a factory setting that needs no adjustment. The setting adjusts the “full scale” operating range of the speedometer to match the dial on the instrument. Using the “Up” and “Down” buttons,adjust the setting to match the maximum reading on the speedometer dial: 50 or 70MPH.Page 8Harness HN0353 Four Wire ConnectorTo Commander™RedBare(Paddle Wheel Signal)(Paddle Wheel Ground)(Paddle Wheel +12 vDc)Sounder Ground)Figure 4Figure 5Harness HN0357Two Wire Connector To Commander™SounderPage 9。
舰载搜救声纳系统参数
舰载搜救声纳系统参数舰载搜救声纳系统是一种用于探测、定位和搜救水下对象的装备,在海上进行救援和搜寻工作时起到了非常关键的作用。
下面是一些常见的舰载搜救声纳系统的参数:1.频率范围:舰载搜救声纳系统通常工作在超低频(ULF)到高频(HF)范围内,以覆盖不同水深和目标类型的需求。
常见的频率范围可以从几十赫兹到几百千赫兹。
2.探测距离:舰载搜救声纳系统的探测距离取决于发射声源的能量和频率、水下环境条件以及目标的特性。
一般来说,低频声纳可以达到较长的探测距离,但对目标分辨率较低;高频声纳可以提供较好的目标分辨率,但探测距离有限。
3.分辨率:舰载搜救声纳系统的分辨率指的是系统能够清晰分辨出不同目标的能力。
分辨率受频率、天线尺寸和算法等多种因素影响。
一般来说,高频声纳系统能够提供更好的分辨率,可以区分并显示较小的目标。
4.声源类型:舰载搜救声纳系统常见的声源类型有主动声纳和被动声纳。
主动声纳系统通过发射声波并接收回波来获得目标信息;被动声纳系统则是通过接收来自目标自身的声波来进行探测。
5.可视化方式:舰载搜救声纳系统的探测结果通常以声纳图像的形式进行显示和分析。
这些声纳图像可以是水平切面、垂直切面或者三维立体图像,以帮助操作人员更好地理解和识别水下目标。
6.纵横比和波束宽度:舰载搜救声纳系统通过调整声源的纵横比和波束宽度来实现对不同深度和距离目标的探测。
纵横比是声源宽度与长度之比,决定了声束的形状和尺寸。
波束宽度则表示声束在目标处的展宽程度,影响着系统的侧向分辨率。
总结起来,舰载搜救声纳系统的参数包括频率范围、探测距离、分辨率、声源类型、可视化方式以及纵横比和波束宽度等。
这些参数将根据实际需求和舰艇特点进行选择和调整,以提高搜救效果和目标识别能力。
美国海军典型无人水面舰艇一览
美国海军典型无人水面舰艇一览目录一、大型无人水面舰艇(LUSV)二、中型无人水面舰艇(MUSV)三、小型无人水面舰艇(SUSV)四、超小型无人水面舰艇(VUSV)长期以来,美国海军高度重视无人水面舰艇的发展,在投资金额和发展速度方面均领先于世界其他各国,其现役与在研无人艇的种类与数量也居全球之首。
根据尺寸及排水量,美国海军无人水面舰艇可分为大型、中型、小型和超小型四种类型。
美海军无人水面舰艇发展图谱大型无人水面舰艇(LUSV)LUSV长度在50米以上,排水量在几百到上千吨,在研项目可达1000-2000吨,和轻型护卫舰体量相当。
目前已交付美国海军的主要是“幽灵舰队”项目下的4艘大型无人水面艇,分别为“游牧者”号、“游骑兵”号、“前卫”号和“海员”号,其艇长约195英尺(约59米)。
其中,“游牧者”号和“游骑兵”号无人艇参加了今年夏天举行的“环太平洋”军演。
“游牧者”号大型无人水面舰艇“游骑兵”号大型无人水面舰艇根据美国海军2023财年的“五年造舰计划”,2025财年将采购1艘LUSV,造价3.15亿美元,2026财年采购2艘,单价2.61亿美元,2027财年采购3艘,单价下降到2.4亿美元。
奥斯塔公司研发的LUSV效果图中型无人水面舰艇(MUSV)MUSV长度在12米到50米之间,排水量一般在500吨以下,接近大型巡逻艇的吨位。
1.“海上猎人”无人艇“海上猎人”号无人舰长40米,排水量达140吨、续航力达6200千米、航速最高可达27节(50公里/小时)、可持续执行任务长达30天,专为跟踪无声柴电潜艇设计建造。
据称,该舰是世界上最大的无人驾驶船只。
美军方认为,“海上猎人”号或成为首款可远距离独立航行的无船员船只。
该艇已于2018年服役。
基于“海上猎人”设计的“海鹰”号也已经于2021年进入美海军服役。
“海上猎人”采用三体结构,在不需要加重龙骨的情况下提供了更高的稳定性,但更大的宽度会使机动性降低。
太极争锋——韩国海军“天王峰”级坦克登陆舰小记

开端—“高峻峰”级与改进型“新港”级坦克登陆舰在21世纪的各主要军事强国
艘“高峻峰”级坦克登陆舰。
“高峻峰”级为传统的舰艏开门型坦克登海军的序列,不过“独岛”号的建造和使用成本似乎比较高,因此规划
—韩国海军“天王峰”级
坦克登陆舰小记
“高峻峰”级 陈培琦
太极争锋
纳LCAC之类的大型气垫船,而搭载小型气垫船的意义也不大,但坞舱也可以搭载AAV7两栖装甲输送车,从而增加两栖投送的兵力。
此外,“天王峰”级的舰桥两侧还各搭载有一艘RIB硬壳充气艇,用于执行海上特种作战任务;“天王峰”级的后甲板设置有大型直升机起降平台,可以起降两架中型直升机或一架双旋翼大型直升机,具有较强的垂直登陆能力,但并没有机库,毕竟这只是7000吨级的坦克登陆舰而已。
“天王峰”级一个堪称世界首创的特色就是配备有防空导弹垂直发射系统,在该级舰的舰桥后部有4个MK41垂直发射单元,采用“一坑四弹”模式配置有16枚ESSM(“北约海麻雀”发展型)中程舰空导弹。
“天王峰”级的舰桥后部还有一部25吨级液压吊臂,可能是与垂直发射系统配套使用的,这是中程舰空导弹在坦克登陆舰上的首次应用,也使得“天王峰”级成为了世界上防空能力最强的坦克登陆舰。
“天王峰”级的雷达、声呐、火控系统和电子对抗设备也是全世界同类舰只中最为完善的,接近甚至可以说是达到了“广开土大王”级驱逐舰的水平。
有意思的是,“天王峰”级的辅助武器是一门40毫米“博福斯”单管速射炮。
40毫米速射炮在韩国海军中使用一直很普遍,但长期以来
“天王峰”号艉部坞舱特写. All Rights Reserved.
32 |军事文摘|2014.01。
CH-46海上骑士的改进

CH-46海上骑士的改进
蔡
【期刊名称】《直升机技术》
【年(卷),期】1996(000)002
【摘要】波音直升机公司对安装新不锈钢旋翼桨毂和改进的减速器与传动轴部件的CH-46“海上骑士”在动力部件改进计划下完成了17小时飞行试验。
这个计划的
【总页数】1页(P17-17)
【作者】蔡
【作者单位】
【正文语种】中文
【中图分类】V275.1
【相关文献】
1.海上骑士汪潮涌 [J], 王鹏;安瑞(图)
2.海上骑士--驱逐舰 [J],
3.海上骑士的挽歌德国潜艇破交战激公愤 [J], 章骞;
4.罗德岛:r爱琴海上的活力古城与骑士传说 [J], Coco
5.CH-46“海上骑士”运输直升机 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
携高性能、长航时海骑兵SD
5月23-25日,在“第十八届上海国际公共安全产品博览会暨上海国际警用及安防无人系统博览会”上,警用安防类无人机则是此次展会的一大亮点,其中包括多旋翼、固定翼、复合翼、反无人机系统等不胜枚举。
厦门汉飞鹰航空公司(以下简称:汉飞鹰)携高性能、长航时海骑兵SD-40垂直起降无人机重磅亮相。
汉飞鹰展位
“海骑兵SD-40”垂直起降固定无人机是由汉飞鹰公司自主研发制造的产品,具备高性能、安全和长航时等功能。
这款飞机采用“固定翼+多旋翼”的复合翼构型。
起降阶段采用四轴8 桨多旋翼提供升力和控制力,转入平飞后多旋翼停转进入固定翼工作模式,集合了多旋翼垂直起降和固定翼大载荷长航时的优点。
海骑兵SD-40垂直起降无人机
双冗余安全保障。