TMS320C54x_DSP地函数发生器地设计
第六章 TMS320C54x DSP程序设计

6.1
C/C++程序设计基础
有参函数比无参函数多了形式参数表,包括形式参数及其类型,在形 参表中给出的参数称为形式参数, 它们可以是各种类型的变量, 各参 数之间用逗号间隔。 示例如下: void Convolveok( double *Input, // 原始输入数据 double *Impulse, // 冲击响应 double *Output, // 卷积输出结果 Word16 length // 卷积序列长度 )
首都师范大学信息工程学院 17
6.1
C/C++程序设计基础
五、 C/C++的DSP访问规则 1. DSP片内寄存器的访问规则 在C语言中对DSP片内寄存器一般采用指针方式来访问, 常常采用的方法是将DSP寄存器地址的列表定义在头文件 中(如reg.h)。 举例,通过指针操作对ST0和AR1进行初始化。
18
6.1
C/C++程序设计基础
2. DSP内部和外部存储器的访问规则 举例,通过指针操作对内部存储器单元0x4000和外部存 储器单元0x80FF进行操作。
int *data1 = 0x4000; int *data2= 0x80FF; int userfunc ( ) { ... * data1 = 7000; * data2 = 0; ... } /*内部存储器单元*/ /*外部存储器单元*/
首都师范大学信息工程学院 16
6.1
C/C++程序设计基础
rts.lib是TI提供的运行时支持库,如果是C代码写的源程序, 必须在工程中添加该库文件。 要想使程序正常运行,一些配臵工作需要完成:打开工程的 Bulid Options选项中两个地方进行设臵。当编译时打不开或 找不到dsplib.h、tms320.h文件,此时可以在compiler标签下选 中preprocessor选项,在Include Search Path栏中填入dsplib.h、 tms320.h所在子目录(本例为:c:\ti\c5400\dsplib\include);当连 接时找不到库函数相应的汇编程序,编译错误提示有些函数 为未定义变量,此时可在linker标签下选中basic选项,在 Library Search Path栏中填入54xdsp.lib、rts.lib库文件所在路径 (本例为:c:\ti\c5400\dsplib;c:\ti\c5400\cgtools\lib,注意 用英文分号隔开);在Include Library栏填入两库文件(本例 为:54xdsp.lib;rts.lib),至此程序可以正常编译。
数字信号处理课程设计
目录一、摘要.................................................................................................................................... - 2 -1、DSP简介 ................................................................................................................... - 2 -2、系统框图...................................................................................................................... - 3 -二、概述.................................................................................................................................... - 4 -1、系统框图描述...................................................................................................................... - 4 -2、设计目的.............................................................................................................................. - 4 -三、系统设计............................................................................................................................ - 4 -1、总体方案设计 ........................................................................................................... - 4 -2、设计原理.................................................................................................................... - 4 -四、硬件设计............................................................................................................................ - 6 -1、系统硬件框图.............................................................................................................. - 6 -2、 TMS320C5402简介....................................................................................................... - 6 -3、电源设计...................................................................................................................... - 7 -4、复位电路设计.............................................................................................................. - 7 -5、时钟电路设计.............................................................................................................. - 8 -6、 D/A数据转换通道....................................................................................................... - 8 -7、独立键盘设计.............................................................................................................. - 9 -五、软件设计.......................................................................................................................... - 10 -1、正弦波形产生原理.................................................................................................... - 10 -2、设计方案.................................................................................................................... - 10 -3、中断程序流程图........................................................................................................ - 11 -4、正弦信号发生器程序清单........................................................................................ - 12 -六、实验结果.......................................................................................................................... - 18 -1、CCS工程项目的调试 ............................................................................................... - 18 -2、仿真结果...................................................................................................................... - 18 -七、总结.................................................................................................................................. - 21 -八、参考文献.......................................................................................................................... - 21 -一、摘要1、DSP简介数字信号处理(Digital Signal Processing,简称DSP)是一门涉及许多学科而又广泛应用于许多领域的新兴学科。
DSP_TMS320C54X系列数字信号处理器与实验
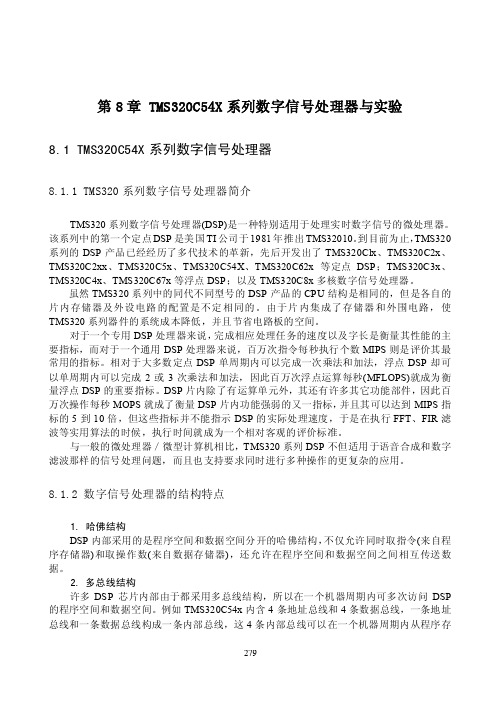
第8章 TMS320C54X系列数字信号处理器与实验8.1 TMS320C54X系列数字信号处理器8.1.1 TMS320系列数字信号处理器简介TMS320系列数字信号处理器(DSP)是一种特别适用于处理实时数字信号的微处理器。
该系列中的第一个定点DSP是美国TI公司于1981年推出TMS32010。
到目前为止,TMS320系列的DSP产品已经经历了多代技术的革新,先后开发出了TMS320Clx、TMS320C2x、TMS320C2xx、TMS320C5x、TMS320C54X、TMS320C62x等定点DSP;TMS320C3x、TMS320C4x、TMS320C67x等浮点DSP;以及TMS320C8x多核数字信号处理器。
虽然TMS320系列中的同代不同型号的DSP产品的CPU结构是相同的,但是各自的片内存储器及外设电路的配置是不定相同的。
由于片内集成了存储器和外围电路,使TMS320系列器件的系统成本降低,并且节省电路板的空间。
对于一个专用DSP处理器来说,完成相应处理任务的速度以及字长是衡量其性能的主要指标,而对于一个通用DSP处理器来说,百万次指令每秒执行个数MIPS则是评价其最常用的指标。
相对于大多数定点DSP单周期内可以完成一次乘法和加法,浮点DSP却可以单周期内可以完成2或3次乘法和加法,因此百万次浮点运算每秒(MFLOPS)就成为衡量浮点DSP的重要指标。
DSP片内除了有运算单元外,其还有许多其它功能部件,因此百万次操作每秒MOPS就成了衡量DSP片内功能强弱的又一指标,并且其可以达到MIPS指标的5到10倍,但这些指标并不能指示DSP的实际处理速度,于是在执行FFT、FIR滤波等实用算法的时候,执行时间就成为一个相对客观的评价标准。
与一般的微处理器/微型计算机相比,TMS320系列DSP不但适用于语音合成和数字滤波那样的信号处理问题,而且也支持要求同时进行多种操作的更复杂的应用。
TMS320C54XX系列DSP人机接口模块设计与实现
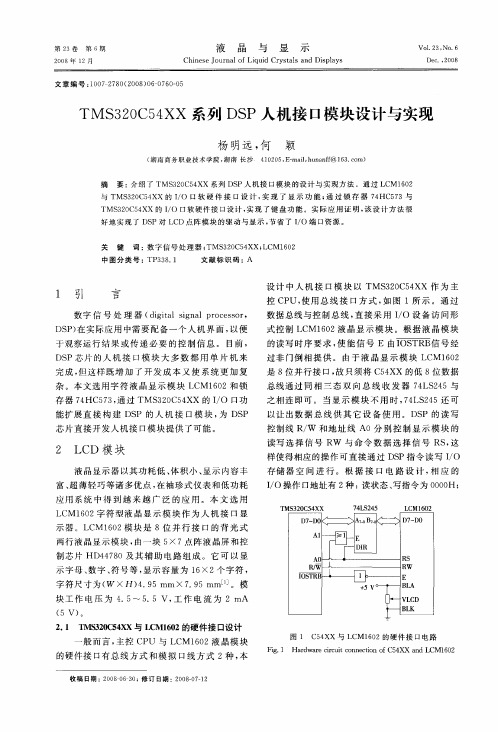
数 字 信 号 处 理 器 ( ii ls n lpo esr dgt i a rcso , a g DS ) P 在实 际应用 中需要 配备一 个人 机界 面 , 以便
于观察 运行结 果 或 传递 必 要 的控 制 信 息 。 目前 ,
存储 器 空 间 进 行 。根 据 接 口 电路 设 计 , 应 的 相 Io操作 口地址有 2 : / 种 读状态 、 写指令 为 0 0 H; 00
T 30 4 MS 2 C5 XX
、, 、—
富 、 薄轻巧 等诸多优 点 , 袖珍 式仪表 和低功 耗 超 在
应用 系 统 中得 到越 来 越 广 泛 的应 用 。本 文选 用 L M1 0 C 6 2字符 型液 晶 显示 模 块 作 为人 机 接 口显 示器 。L M1 0 C 6 2模块 是 8位 并 行 接 口的背 光 式
两 行 液 晶显 示 模 块 , 由一 块 5 ×7点 阵 液 晶屏 和 控
7L 4 4 S2 5
/ 、 —— / ——
LC 1 0 M 62
D7 ~D0
D7 DO / — — - \ _ 7 L ~ — — ^ 0B / —— A7 A1— E
厂U DR I
D P芯 片 的人 机 接 口模 块 大多 数 都 用 单 片机 来 S 完成 , 这样 既增 加 了开 发成 本 又 使 系统 更 加 复 但 杂 。本 文选用 字符 液 晶显 示模 块 L M1 0 C 6 2和锁 存器 7 HC 7 , 过 T 4 5 3通 MS 2 C 4 X 的 IO 口功 3O 5X / 能扩展 直 接 构 建 D P的人 机 接 口模 块 , DS S 为 P 芯片 直接开发 人机接 口模块 提供 了可能 。
DSP技术 第5章 TMS320C54x DSP的汇编语言程序设计

A B T FRCT
指令执行前 00 0000 1000H 00 0000 0000H
0400H 1
A B T FRCT
指令执行后 00 0000 1000H 00 001A 3800H 0400H 1
【例13】 MACR *AR3+,*AR4+,A,B
A B T FRCT AR3 AR4 数据存储器 0100H 0200H
表5.8 乘加和乘减指令
【例11】 MAC #345H,A,B
A B T FRCT
指令执行前 00 0000 1000H 00 0000 0000H 0400H 0
A B T FRCT
指令执行后 00 0000 1000H 00 000D 2400H 0400H 0
【例12】 MAC #345H,A,B
表达式可以是常数、符号,或者是由算术运算符 分开的一系列常数和符号。
有效表达式的值: -32 768~32 767 影响表达式的主要因素:
① 圆括号( )。圆括号内的表达式最先计算; ② 优不先能级用。大’括C号5{4x}汇或编中器括使号用[ ]代与替C语圆言括相号似( 的)。优
先级,优先级高的先计算;
0101H 0201H
TMS320C54XDSP原理、编程及应用
4.2 汇编源程序格式
汇编语言是DSP应用软件的基础,编写汇编语言必须要符合 相的格式,这样汇编器才能将源文件转换为机器语言的目标 文件。汇编语言指令书写形式有两种:助记符形式和代数式 形式,本章以助记符指令系统为主介绍。TMS320C54X汇编语 言源程序由源说明语句组成,包括汇编语言指令、汇编伪指 令(汇编命令)、宏指令(宏命令)和注释等,一般一句程序占 据编辑器的一行。汇编器每行最多只能读200个字符,因此源 语句的字符数不能超过200个。一旦长度超过200个字符,汇 编器将自行截去行尾的多余字符并给出警告信息。
1.1 指令系统概述
符号 意义
SHFT
4位移位数(0≤SHFT≤15)
SHIFT 5位移位数(-16≤SHFT≤15) Sind Smem SP src ST0 ST1 SXM 使用间接寻址的单数据存储器操作数 16位单数据存储器操作数 堆栈指针 源累加器(A或B) 状态寄存器0 状态寄存器1 ST1中的符号扩展方式位
4.2.2 汇编语言常量
C54X汇编器支持7种类型的常量:二进制整数、八进制整数、十进 制整数、十六进制整数、字符常量、汇编时间常量和浮点数常量。
汇编器在内部把常量作为32位量常量不能进行符号扩展。例如,常量 FFH等同于00FFH(16进制)或255(10进制),但不是-1。
1. 二进制整数常量 二进制整数常量最多由16个二进制数字组成,其后缀为B(或b)。 如果少于16位,汇编器将向右对齐并在左面补零。下列二进制整 数常量都是有效的。
4.2.1 汇编语言语句格式
1. 标号域
标号供本程序的其他部分或其他程序调用。对于所有C54X汇编指令和 大多数汇编伪指令,标号都是可选项,但伪指令.set和.equ除外,二 者需要标号。标号值和它所指向的语句所在单元的值(地址或汇编时 段程序计数器的值)是相同的。 使用标号时,必须从源语句的第一列开始。一个标号允许最多有32个 字符:A~Z、a~z、0~9、_和$,第一个字符不能是数字。标号对大 小写敏感,如果在启动汇编器时,用到了-c选项,则标号对大小写不 敏感。标号后可跟一个冒号“:”,也可不跟。如果不用标号,则第 一列上必须是空格、分号或星号。
DSP原理及应用TMS320C54x片内外设及应用实例
应用领域拓展
随着数字信号处理技术的不断发展,DSP的应用领 域也在不断拓展,需要不断探索新的应用场景和市 场需求。
人才培养和生态系统建设
为了推动DSP技术的发展和应用,需要加强 人才培养和生态系统建设,建立完善的开发 环境和工具链。
06
参考文献
参考文献
1
[1] 张雄伟, 杨吉斌. 数字信号处理——原理、算 法与实现[M]. 北京: 清华大学出版社, 2011.
应用场景
在音频处理、信号测量、控制系统 等领域广泛应用。
存储器和I/O引脚
存储器和I/O引脚功能
01
TMS320C54x芯片具有外部存储器和多个I/O引脚,用于扩展外
部存储空间和连接外设。
工作原理
02
通过读写外部存储器实现数据存储,I/O引脚用于输入输出电平
信号。
应用场景
03
在数据存储、外设控制、信号采集等方面具有广泛应用。
FFT在TMS320C54x上的实现
TMS320C54x的硬件结构支持FFT运算,其乘法器和累加器运算单元可以高效地完成 FFT计算。在实现FFT时,需要注意数据的位序和存储方式。
FFT应用实例
通过FFT算法,可以分析语音、图像、雷达等信号的频谱成分,从而实现信号的频域分 析、滤波、调制解调等功能。
TMS320C54x的优势与局限性
• 丰富的外设接口:TMS320C54x系列DSP具有多种外设接口, 如串行通信接口、并行输入输出接口等,方便与外部设备进行 数据交换。
TMS320C54x的优势与局限性
价格较高
由于TMS320C54x系列DSP采用高性能的制程技术和复杂的内 部结构,导致其价格较高,增加了应用成本。
DSP原理及应用TMS320C54x片内外设及应用实例

数字信号处理是如何工作的?TMS320C54x提供了强大的处理能力和片内外 设,可以帮助我们实现各种各样的应用,本次演示将带您深入了解高效的 DSP应用。
DSP原理介绍
1 DSP快速傅里叶变换
用于信号频谱分析及滤波。
3 数字模拟转换器
将模拟信号转换为数字信号。
片内外设介绍
1
高速串行接口
用于连接其他高速设备以及DSP的外
可编程外设接口
2
设模块。
可以实现各种外设和DSP之间的灵活
通讯。
3
嵌入式闪存
可储存程序代码、数据,提高运行速 度。
应用实例1
声音信号处理
实现语音信号的压缩、降 噪和增强等功能。
医疗电子设备
通过DSP对医疗设备信号 进行处理,实现医疗仪器 的精准度和效率的高度提 升。
应用实例3
1
机器视觉
基于DSP的运算速度和精度,可以实时处理图像和视频等信号。
2
雷达信号处理
通过DSP实现雷达信号的识别、追踪和跟踪等功能。
3
电力控制系统
通过嵌入式闪存存储电力控制程序,实现高效电力控制和管理。
应用实例4
1 无线通信
通过DSP实现信号调制、解调等关键功能,提高通讯效率和可靠性。
2 车载信息娱乐系统
自控制
配合传感器实现智能化控 制,提高生产效率、节约 资源。
应用实例2
数字音频工作站
通过数字信号处理技术和DSP 实现音频采集、混音、修剪等 功能。
噪音控制
对噪声信号进行频谱分析和滤 波处理,实现噪音消除和降噪 功能。
音乐制作
DSP可以高效处理各种乐器的 信号,帮助音乐家实现更加理 想的音乐作品。
DSP原理及应用 TMS320C54x片内外设及应用实例
表8-4 复位时的时钟方式(C5402)
CLKMD 1 0
0 0 1 1 1 1 0
CLKMD 2 0
0 1 0 1 1 0 1
CLKMD 3 0
1 0 0 0 1 1 1
CLKMD寄存 器 E007H
9007H 4007H 1007H F007H 0000H F000H …
时钟方式
乘15,内部振荡器工作,PLL工作
返回首页
图8-1 定时器组成框图
表8-1 定时器的三个寄存器
Timer0 地址 0024H 0025H 0026H Timer1 地址 0030H 0031H 0032H 寄存器 TIM PRD TCR 说明 定时器寄存器,每计数一次自动减 1
定时器周期寄存器,当TIM减为0 后,CPU自动将PRD的值装入TIM
:>SPRAM1
STACK :>SPRAM2
返回本节
8.4 多通道缓冲串口(McBSP)
8.4.1 McBSP原理框图及信号接口
8.4.2 McBSP控制寄存器 8.4.3 时钟和帧同步 8.4.4 McBSP数据的接收和发送 8.4.5 有关的几个概念
返回首页
8.4.1 McBSP原理框图及信号接口
定时器控制寄存器,包含定时器的 控制和状态位
15~12 保留
11 soft
10 free
9~6 PSC
5 TRB
4 TSS
3~0 TDDR
图8-2 TCR位结构图
表8-2 定时器控制寄存器(TCR)的功能
返回本节
8.2 时钟发生器
8.2.1 硬件配置PLL 8.2.2 软件可编程PLL
DSP原理及应用-TMS320C54x软件开发

数字信号处理(DSP)是一种重要的信号处理技术,在各领域有广泛的应用。 本课程将深入介绍DSP原理及TMS320C54x软件开发,帮助您掌握相关知识和 技能。
1. DSP概述
介绍数字信号处理的基本概念、作用和应用领域。
2. 数字信号处理基础
讲解数字信号处理的基本原理、采样和量化技术。320C54x系列数字信号处理器的特点和应用领域。
4. TMS320C54x系列特点
详细介绍TMS320C54x系列数字信号处理器的性能和特点。
5. TMS320C54x芯片架构
解析TMS320C54x芯片的内部结构和功能模块。
6. TMS320C54x软件开发环境
介绍TMS320C54x软件开发所需的开发环境和工具。
7. CCS软件环境概述
讲解CCS(Code Composer Studio)软件开发环境的特点和使用方法。
8. DSP算法设计流程
探讨在DSP开发中的算法设计过程和最佳实践。
绪论《TMS320C54XDSP结构、原理及应用》
如JPEG、MC54xDSP可以用于实现各种图像识别算法,如人脸识别、手势
识别等。
在自动控制系统中的应用
控制系统建模与仿真
利用TMS320C54xDSP的高速运算能力,可以实现各 种控制系统的建模与仿真。
控制系统分析与优化
利用TMS320C54xDSP的高速运算能力,可以对控制 系统进行分析和优化,提高控制系统的性能。
音频处理
音频压缩、音频分析、音频合 成等。
控制与自动化
电机控制、智能仪表、自动控 制系统等。
TMS320C54xDSP的主要特点
高性能
采用哈佛结构,流水线作业,运算速度快。
低功耗
采用低功耗设计,适合于电池供电和便携式 设备。
定点运算
采用定点运算,无需浮点运算器,降低了成 本和功耗。
可扩展性
具有可扩展的外部存储器和I/O接口,方便 系统集成和升级。
存储器结构
1
TMS320C54xDSP具有内部和外部存储器两种类 型的存储器结构。
2
内部存储器包括程序存储器和数据存储器,用于 存储程序代码和临时数据。
3
外部存储器通过外部总线接口与DSP相连,提供 更大的存储空间。
输入/输出(I/O)接口
01
I/O接口是TMS320C54xDSP与外部设备进行通信的桥梁。
02 TMS320C54xDSP的结 构
中央处理单元(CPU)
01
CPU是TMS320C54xDSP的核心部分,负责执行指令和控制数 据流。
02
它包括算术逻辑单元(ALU)、累加器、程序计数器、指令寄
存器等组件。
CPU通过指令集架构(ISA)与外部组件进行通信,以执行各种
03
CH08 - TMS320C54x应用系统设计举例
第8章 TMS320C54x应用系统设计举例教学提示:对于DSP工程技术人员来说,面对具体的开发目标,分析其技术指标和要求,确定适当的算法、估计运算量、存储器的使用量和功耗,从而选择适当的DSP处理器,进行软硬件的设计、实现和调试,是难度和工作量都很大的工作。
只有在大量的实践工作中,不断地积累经验,不断地学习与完善,才能越做越好。
本章通过DSP应用中几个典型的案例讨论,希望对读者在DSP系统的设计、方案的选择和实现等方面有所帮助。
教学要求:了解DSP应用系统设计基本步骤,掌握正弦信号发生器、FIR数字滤波器的设计和实现方法,了解快速傅里叶变换、语音信号采集和回放的实现方法,并简单了解C语言编程的基本方法。
8.1 DSP应用系统设计基本步骤一个DSP应用系统设计包括硬件设计和软件设计两部分。
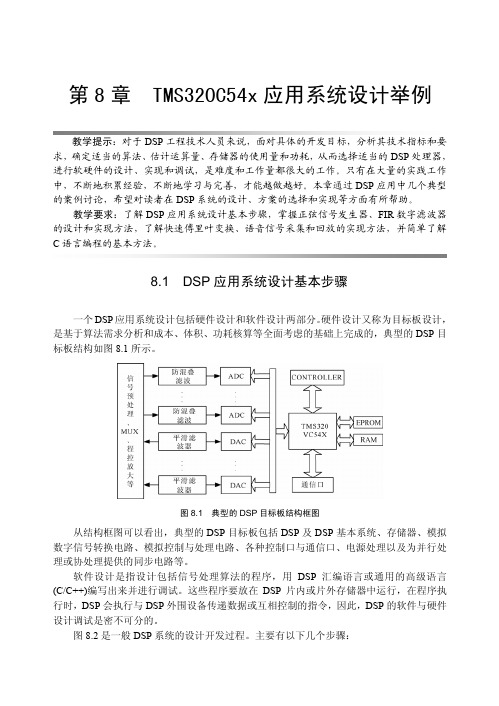
硬件设计又称为目标板设计,是基于算法需求分析和成本、体积、功耗核算等全面考虑的基础上完成的,典型的DSP目标板结构如图8.1所示。
图8.1 典型的DSP目标板结构框图从结构框图可以看出,典型的DSP目标板包括DSP及DSP基本系统、存储器、模拟数字信号转换电路、模拟控制与处理电路、各种控制口与通信口、电源处理以及为并行处理或协处理提供的同步电路等。
软件设计是指设计包括信号处理算法的程序,用DSP汇编语言或通用的高级语言(C/C++)编写出来并进行调试。
这些程序要放在DSP片内或片外存储器中运行,在程序执行时,DSP会执行与DSP外围设备传递数据或互相控制的指令,因此,DSP的软件与硬件设计调试是密不可分的。
图8.2是一般DSP系统的设计开发过程。
主要有以下几个步骤:第8章 TMS320C54x应用系统设计举例·245·图8.2 DSP系统的设计开发过程1. 确定系统的性能指标设计一个DSP系统,首先要根据系统的使用目标确定系统的性能指标、系统功能的要求。
2. 进行算法模拟对一个实时数字信号处理的任务,选择一种方案和多种算法,用计算机高级语言(如C、MATLAB等工具)验证算法能否满足系统性能指标,然后从多种信号处理算法中找出最佳的算法。
TMS320C54xDSP原理及应用课程设计
TMS320C54x DSP原理及应用课程设计1. 引言本课程设计旨在通过对TI(德州仪器)公司生产的TMS320C54x系列DSP的学习和实践,使学生掌握该系列DSP的基本原理和应用方法,提高学生的分析、设计和实践能力。
2. TMS320C54x DSP的基本原理TMS320C54x DSP是TI公司推出的具有高速运算能力和广泛应用领域的数字信号处理器。
其主要特点如下:1.高性能:TMS320C54x DSP采用流水线结构,具有非常高的指令执行速度和低的指令延迟。
2.广泛应用:TMS320C54x DSP可广泛应用于图像处理、声音处理、通信、控制等领域。
3.易于开发和应用:TMS320C54x DSP具有丰富的开发、调试工具和成熟的应用方案,使开发者能够更加便捷地进行开发和应用。
3. TMS320C54x DSP的应用TMS320C54x DSP的广泛应用领域包括:3.1 图像处理领域TMS320C54x DSP具有强大的图像处理能力,可用于数字摄像机、数字照相机、机器视觉等领域。
3.2 声音处理领域TMS320C54x DSP具有丰富的数字信号处理功能,特别是对于音频信号的处理,具有很高的效率和质量。
3.3 通信领域TMS320C54x DSP可以用于数字通信领域,如移动通信、卫星通信等,可以提高通信速度和质量。
3.4 控制领域TMS320C54x DSP可以广泛应用于各种控制系统,如电机控制、自动控制等,具有很高的控制精度和稳定性。
4. TMS320C54x DSP的应用实践本课程设计要求学生使用TMS320C54x DSP开发一个数字信号处理系统,并完成如下任务:1.设计算法:自行设计一个数字信号处理算法,并编写代码实现。
2.调试系统:使用开发工具,对设计的数字信号处理系统进行调试和测试。
3.文档撰写:完成课程设计文档的撰写,包括设计思路、实验步骤、测试结果等内容。
5. 实验步骤本课程设计的实验步骤如下:1.硬件准备:按照实验要求,准备好TMS320C54x DSP芯片和配套硬件。
最新6汇编语言程序设计《TMS320C54XDSP结构、原理及应用》
及应用》
2
概述
汇编语言源程序格式:
助记符指令一般包含4个部分,其一般组成形式为:
➢ [标号][:] 助记符 [操作数] [;注释]
书写格式规则详见P138,①②③④⑤⑥!
标号—所有汇编指令和大多数汇编伪指令前面都可以带有 标号;必须从第一列开始书写;最多32个字符;由字母、数 字、下划线和$组成,且不能以数字开头;分大小写;冒号 不属于标号名;没有标号的源语句第一列必须为空格、星号 或分号。
◆ 循环操作
.bss x, 10
.bss y,
1
当条件满足时,重复执行某一段程序ta;bl可e: 以通.w过ordBAN1Z,2指,3,4令,5实,6,7现,8。,9,10
指令格式: BANZ
转移地址, 辅助寄存.d器ef start
指令功能:当辅助寄存器不为0时,s则tar转t:至转S移 TM地址;#0否 , SW则W,S顺R 序执
说明
AEQ BEQ ANEQ BNEQ ALT BLT
ALEQ
BLEQ AGT BGT AGEQ BGEQ
A=0 累加器A等于0
AOV
B=0 累加器B等于0
BOV
A0 累加器A不等于0 ANOV
B0 累加器B不等于0 BNOV
A<0 累加器A小于0
C
B<0 累加器B小于0
NC
A0 累加器A小于等于0 TC
FBACC[D] 用累加器的低23位指定的地址加载PC和XPC
【例】5.3.1 分支转移
12.02.2021
湖南理工学院 胡 子程调用
分类
指令
说明
CALL[D] 无条件调用
第7章基本系统设计

第7章 TMS320C54x基本系统设计
2) BSP引脚用作通用I/O
在满足下面两个条件的情况下能将串口的引脚(CLKX、 FSX、DX、CLKR、FSR和DR)用做通用的I/O引脚。 (1) 串口的相应部分处于复位状态,即寄存器SPC[1,2]中的 (R/X)RST=0。 (2) 串口的通用I/O功能被使用,即寄存器PCR中的 (R/X)IOEN=1。
第7章 TMS320C54x基本系统设计 7.3 A/D和D/A接口设计
3) TLC7528与TMS320VC5402的接口设计
TLC7528与C5402的接口电路如图所示。TLC7528电源采用5V供电,因此 DB0~DB7与D0~D7直接相连。/CS是片选脚,可以利用DSP的IS与地址线A15 经过译码产生片选信号,其地址为7FFFH,/DACA、/DACB为输出通道选择 信号,本电路只使用一个输出DACA,因此直接将此引脚和/CS短接。选择单 极性输出,RFBA端输入运放反馈信号。模拟电压信号从VOA输出。
第7章 TMS320C54x基本系统设计 7.3 A/D和D/A接口设计
2)并行A/D转换器TLV1571的 特点
(1) 与DSP和微控制器兼容的并 行接口。
(2) 二进制/2的补码输出。
(3) 硬件控制的扩展采样。
(4) 硬件或软件启动转换。
3)并行A/D转换器TLV1571的引 脚
说明:
/CSTART:硬件采样和转换启动输入,下 降沿启动采样,上升沿启动转换 /INT/EOC:转换结束/中断
TLC5617数字输入端带有施密特触发器,具有较高的噪声 抑制能力。输入数据更新速率为1.21MHz,数字通信协议符 合SPI、QSPI、Microwire标准。
TMS320C54XX系列DSP中断系统的编程
wo d r
_
0, 0 0,
一
一
一
q 3l
b
r et
np o hp o
it n0
() 1 引用中断服务程序标号 , “e _ IT3 R 如 xf TN 0 S ”。
() 2引用 其 他在 中断 向量 程 序 中使 用 的程 序 标
号 , “rf c it0 ‘e rt 如 ~ n0 … . f e r e”。
放 在 以 0 F 0 默认 ) F S H( 为起 始 地址 的连 续 18B空 2 间 ,S D P可从 中断 向量 表进 入并执 行 复位 中断 服务
.pa e 4 6 s c 1
.pa e 4 6 s c 1
sn 21 .pa e 1 i t s c 4 6
sn 2 it2
sn 2 it3
.pa e 1 s c 4 6
.pa e 4 6 s c 1 .pa e 4 6 s c 1
Re e XF: st RS BX
地由
用于 主程序 修改 WT ( R 中断 向量指 针 寄存 器) 的值 , 指 向中断 向量表 的新位 置 , 实现 中断 向量 表 的重新
定 位 。 而可得 中断 向量表 程序 。 从
.
mmr g es
.
rf e
rt e
.
rf e it0 e n O
.
r f TI e NT0 S I R go lv co lba e t r
s c . t t b e e t i a l n
2 举 例
要 求 : 用 定 时 器 中 断 产 生 一 个 方 波 。 中 断 采 该 系统 的设计包 括 : 中断 服 务 程 序 ; 断 向量 表 ; 程 中 主
TMS320C54x软件开发过程DSP原理与开发实例

两指令等价,将一个或多个值放在当前段的连续的16位域中。 ★ .long value1 [,…,valuen]:
将32位的值存储在当前段的两个连续字中,先存最高有效位。 ★ .string “string1”[,…,“stringn”]
8种伪指令: 1)段定义伪指令; 2)常数初始化伪指令; 3)段程序计数器定位伪指令; 4)输出列表格式伪指令; 5)引用其他文件的伪指令; 6)条件汇编伪指令; 7)汇编时符号定义伪指令; 8)其他汇编伪指令。
命必地配可必段可个名需址s选需名选 字iz了参 的 参,。e个未数 符 数注也字初, 号 。 ,意。 就。始定 , 应 如 应s如 是e化义符该果该果说ct段i了号是该是该除on。指名绝参绝参非n注向对对数对数saizm意伪应表大表大ee大必指于达于达于必于须令所式式00须,,一包所 要 。 。包段汇页含保 保 汇 定含对编,在留 留 编 义在准器否双的 空 器 了双到分则引第 间 在 保引长配被号一 的 留.内b字连分内个 变 的s。边续s配。单 量 字段界的的元 。 数内s空。i分ze
.field value [,size in bits]:将单个值放进当前字的指定 位域。此指令可将数值放入当前字中规定的位数,并从最高 有效位开始。在字被填满前,汇编器不增加段程序计数器 (SPC)的值。
汇编伪指令
★ .float value1 [,…,valuen]:计算以IEEE格式表示的单 精度(32位)浮点数,并将它存储在当前段的两个连 续的字中,先存最高有效位。
汇编语言程序的编辑、汇编和链接过程
§3.2 汇编语言程序的 编辑、汇编和链接过程
DSP基于TMS320C54XDSP设计简易数字示波器
工业大学论文题目:《DSP应用》课程论文副标题:基于TMS320C54X DSP设计简易数字示波器课程名称:《DSP应用》学院:信息科学与工程学院班级:电科1304姓名:学号:指导老师:王洪群摘要:随着电子测试技术的不断发展,测试技术正向着自动化、智能发、数字法的方向发展。
其中示波器是电子测量中一种最常用的仪器,被广泛应用于各个领域。
随着微电子技术和计算机技术的飞速发展,示波器也从模拟示波器向数字示波器发展。
同模拟示波器相比,数字示波器具有很多优点,并开始逐步取代模拟示波器成为市场上的主流。
本文主要完成了简易数字示波器的设计, 通过DSP编程并结合TI公司的数字信号处理器TMS320C5402、A/D转换模块、LCD等配合外围电路进行设计。
With the continuous development of electronic testing technology, testing technology is moving in the direction of automation, intelligent development, digital law. Among them, oscilloscope is one of the most commonly used instruments in electronic measurement, which is widely used in various fields. With the rapid development of microelectronics technology and computer technology, oscilloscopes from analog oscilloscope to digital oscilloscope development. Compared with analog oscilloscopes, digital oscilloscope has many advantages, and began to gradually replace the analog oscilloscope to become the mainstream on the market.This paper mainly completes the design of the simple digital oscilloscope, and designs it by DSP programming combined with thedigital signal processor TMS320C5402, A / D conversion module, LCD and so on with the external circuit of TI Company.关键字:DSP TMS320C5402数字示波器频率DSP TMS320C5402 Oscilloscope frequency一、DSP的发展历史及现状数字信号处理(Digital Signal Processing,简称DSP)是一门涉及许多学科而又广泛应用于许多领域的新兴学科,数字信号处理是一种通过使用数学技巧执行转换或提取信息,来处理现实信号的方法,这些信号由数字序列表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
广东石油化工学院DSP综合实验报告课程名称: DSP系统开发与设计实验题目:函数信号发生器学号:姓名:班级:指导老师:实验日期: 2012-6-11至2012-6-15基于TMS320C54x DSP 的函数发生器的设计一、 设计目的:1、 了解数字波形产生的原理;2、 学习用DSP 产生各种波形的基本方法和步骤;3、 掌握DSP 与D/A 转换器接口的使用。
二、 设计设备计算机、DSP 仿真器、ZYE1801B 实验箱、20M 示波器三、 设计原理波形产生是DSP 的重要应用之一。
而正弦信号发生器的设计则是波形产生应用的一个重要方面,它在通信领域有着广泛的应用。
通常有两种方法可以产生正弦波,分别为查表法和泰勒级数展开法。
查表法是通过查表的方式来实现正弦波,主要用于对精度要求不很高的场合。
泰勒级数展开法是根据泰勒展开式进行计算来实现正弦信号,它能精确地计算出一个角度的正弦和余弦值,且只需要较小的存储空间。
本次主要用泰勒级数展开法来实现正弦波信号。
产生正弦波的算法正弦函数和余弦函数可以展开成泰勒级数,其表达式:取泰勒级数的前5项,得近似计算式:-+-+-=!9!7!5!3)sin(9753x x x x x x -+-+-=!8!6!4!21)cos(8642x x x x x ))))((((981761541321 !9!7!5!3)sin(22229753⨯-⨯-⨯-⨯-=+-+-=x x x x x x x x x x x )))(((87165143121 !8!6!4!21)cos(22228642⨯-⨯-⨯--=+-+-=x x x x x x x x x递推公式:sin(nx) = 2cos(x)sin[(n-1)x]-sin[(n-2)x]cos(nx) = 2cos(x)sin[(n-1)x]-cos[(n-2)x]由递推公式可以看出,在计算正弦和余弦值时,需要已知cos(x)、sin(n-1)x、sin(n-2)x 和cos(n-2)x。
为了减少使用的存储器,可以采用正弦信号的对称性,复制90~180度的正弦值和180~360度的正弦值。
余弦信号的产生同样可以采用多种方法产生。
一是采用公式计算得到,二是采用正弦信号变换得到。
方波信号产生可以通过轮流输出两个不同大小的数值通过A/D转换得到。
四、设计内容本设计题目以TMS320C54x DSP为目标器件,设计并实现基于迭代法的“正弦序列生成”算法及其DSP程序。
设计步骤:1、熟悉正弦信号发生器的算法以及在DSP系统的实现2、熟悉A/D转换的原理及实验箱的链接3、掌握A/D转换的程序的编写4、编写DSP的正弦信号发生器的程序5、编写定时程序产生100HZ、1KHZ、10KHZ的正弦、余弦以及100K、1M的方波信号,每种类型的波形单周期360个点。
6、编写按键程序,控制输出。
用三个拨码开关对DSP进行输入,输入的0~7对应的8种不同的波形。
7、用示波器观察各个波形8、分析波形失真的原因。
五、实验步骤1. 熟悉本实验原理。
2. 阅读本实验样例程序。
3. 依次连接主板上的PC10、PC11、TP32到PC15、PC16、GND;依次连接主板上的PC13、PC14、M58到插板上的DJ0、DJ1、S12。
4. 将计算机与ZYE1801C实验箱通过并口P1相连。
5. 运行CCS软件客户软件\DSP程序\test19,通过插板上的JP1,JP2,JP3来选择不同的波形。
6. 用示波器观察DA0的输出波形。
六、设计的硬件结构框图七、实验代码先计算0~45°(间隔为0.5°)的sin和cos值,在利用sin2a=2sina*cosa求出sin值(间隔为1°)。
然后,通过复制,获得0~359°的正弦值。
重复向PA口输出,便可得到正弦波。
.title "bxfsq.asm".mmregs.global main.def start.ref d_xs,d_sinx,d_xc,d_cosx,sinx,cosx sin_x: .usect "sin_x",360cos_x: .usect "cos_x",360fangbo: .usect "fangbo",360STACK: .usect "STACK",10Hk_theta: .set 286TIM0 .set 0024HPRD0 .set 0025HTCR0 .set 0026HPA .set 0100H.textstart:;产生正弦波数据STM k_theta,AR0STM #0,AR1STM #sin_x,AR6STM #90,BRCRPTB loop1-1LDM AR1,ALD #d_xs,DPSTL A,@d_xsSTL A,@d_xcCALL sinxCALL cosxLD #d_sinx,DPLD @d_sinx,16,AMPYA @d_cosxSTH B,1,*AR6+MAR *AR1+0loop1: STM #sin_x+89,AR7STM #88,BRCRPTB loop2-1LD *AR7-,ASTL A,*AR6+loop2: STM #179,BRCSTM #sin_x,AR7RPTB loop3-1LD *AR7+,ANEG ASTL A,*AR6+loop3: STM #sin_x+89,AR6STM #cos_x,AR7STM #269,BRCRPTB lcos-1 LD *AR6+,ASTL A,*AR7+lcos: STM #sin_x,AR6STM #89,BRCRPTB loop4-1LD *AR6+,ASTL A,*AR7+;产生方波数据loop4: STM #fangbo,AR6STM #179,BRCRPTB lfangbo-1LD #7FFFH,ASTL A,*AR6+lfangbo:STM #179,BRCRPTB main-1LD #0H,ASTL A,*AR6+main:STM #0,SWWSRSTM #STACK+10H,SPSTM #3FA0H,PMSTSTM #0010H,TCR0STM #0260H,TCR0STM #0008H,IFRSTM #0008H,IMRRSBX INTMPORTR PA,*AR2LD *AR2,AAND #01B,ABC fangbo_1m,ANEQLD *AR2,AAND #010B,ABC fangbo_100k,ANEQLD *AR2,AAND #0100B,ABC sin_10k,ANEQLD *AR2,AAND #01000B,ABC sin_1k,ANEQLD *AR2,AAND #010000B,ABC sin_100,ANEQLD *AR2,AAND #0100000B,A BC cos_10k,ANEQLD *AR2,AAND #01000000B,ABC cos_1k,ANEQLD *AR2,AAND #10000000B,ABC cos_100,ANEQend: B endfangbo_1m:STM #10,TIM0STM #fangbo,AR3B mainfangbo_100k:STM #110,TIM0STM #110,PRD0STM #fangbo,AR3B mainsin_10k:STM #2,TIM0STM #2,PRD0STM #sin_x,AR3B mainsin_1k:STM #30,TIM0STM #30,PRD0STM #sin_x,AR3B mainsin_100:STM #306,TIM0STM #306,PRD0STM #sin_x,AR3B maincos_10k:STM #2,TIM0STM #2,PRD0STM #sin_x,AR3B maincos_1k:STM #30,TIM0STM #30,PRD0STM #sin_x,AR3B maincos_100:STM #306,PRD0STM #sin_x,AR3B main;定时器中断输出TINT_T0:STM #1,AR0STM #360,BKloop:PORTW *AR3+0%,PAB loopRETEsinx: .def d_xs,d_sinx.datatable_s: .word 01c7h ;c1=1/(8*9) .word 030bh ;c2=1/(6*7) .word 0666h ;c3=1/(4*5) .word 1556h ;c4=1/(2*3) coef_s: .usect "coef_s",4d_xs: .usect "sin_vars",1squr_xs: .usect "sin_vars",1temp_s: .usect "sin_vars",1d_sinx: .usect "sin_vars",1l_s: .usect "sin_vars",1.textSSBX FRCTSTM #coef_s,AR5RPT #3MVPD #table_s,*AR5+STM #coef_s,AR3STM #d_xs,AR2STM #l_s,AR4ST #7FFFH,l_sSQUR *AR2+,A||LD *AR4,BMASR *AR2+,*AR3+,B,AMPYA ASTH A,*AR2MASR *AR2-,*AR3+,B,AMPYA *AR2+ST B,*AR2||LD *AR4,BMASR *AR2-,*AR3+,B,AMPYA *AR2+ST B,*AR2||LD *AR4,BMASR *AR2-,*AR3+,B,AMPYA d_xsSTH B,d_sinxRETcosx: .def d_xc,d_cosx.datatable_c .word 0249h ;c1=1/(8*7).word 0444h ;c2=1/(6*5).word 0aabh ;c3=1/(4*3).word 4000h ;c4=1/(2*1) coef_c .usect "coef_c",4d_xc .usect "cos_vars",1squr_xc .usect "cos_vars",1temp_c .usect "cos_vars",1d_cosx .usect "cos_vars",1l_c .usect "cos_vars",1.textSSBX FRCTSTM #coef_c,AR5RPT #3MVPD #table_c,*AR5+STM #coef_c,ar3STM #d_xc,AR2STM #l_c,AR4ST #7FFFH,l_cSQUR *AR2+,AST A,*AR2||LD *AR4,BMASR *AR2+,*AR3+,B,AMPYA ASTH A,*AR2MASR *AR2-,*AR3+,B,AMPYA *AR2+ST B,*AR2||LD *AR4,BMASR *AR2-,*AR3+,B,ASFTA A,-1,ANEG AMPYA *AR2+MAR *AR2+RETDADD *AR4,16,BSTH B,*AR2RET.sect ".vectors".align 0x80 RESET: BD main STM #200,SP nmi: RETENOPNOPNOPsint17 .space 4*16sint18 .space 4*16sint19 .space 4*16sint20 .space 4*16 sint21 .space 4*16 sint22 .space 4*16 sint23 .space 4*16 sint24 .space 4*16 sint25 .space 4*16 sint26 .space 4*16 sint27 .space 4*16 sint28 .space 4*16 sint29 .space 4*16 sint30 .space 4*16int0: RETENOP NOP NOP int1: RETENOP NOP NOP int2: RETENOP NOP NOP tint: B TINT_T0 NOP NOP NOP rint0: RETENOP NOP NOP xint0: RETENOPNOPNOPrint1: RETENOPNOPNOPxint1: RETENOPNOPNOPint3: RETENOPNOPNOP.end2、cmd文件代码如下:说明系统中有哪些可用存储器、程序段、堆栈及复位向量和中断向量等安排在什么地方。