Localizer 1.1 and beyond
电子谐音Battalion Bass Preamp+DI说明书
BATTALIONBASS PREAMP + DI Congratulations on your purchase of the Electro-Harmonix Battalion. The all-analog circuitry of the Battalion provides you with an amazing amount of features in a sturdy and compact pedal. Basic functions include a four-bandequalizer, a compressor, and a noise gate. The Battalion also packs a full-featured MOSFET distortion section, including a three-way toggle switch to change where the distortion section is placed in the signal path, thereby expanding the tonal versatility of the preamp.In addition, the Battalion includes a balanced, XLR output for use as a DI, as well as separate level and bypass controls for the XLR out. The ¼” output jack is headphone ready and perfect for quiet practicing. So, are you ready to head into the trenches? Road warriors and studio musicians alike will appreciate the stunning quality and multiple features at their disposal.- USING THE BATTALION -Plug the 9VDC adapter into the jack on the top of the Battalion. The unit must be powered to pass a signal. Connect an instrument cable from your bass into the INPUT jack. Insert an instrument cable between the OUTPUT jack and a suitable amplifier, or insert an XLR cable between the DI OUTPUT jack and a suitable mixing console or recording interface. Click the BYPASS footswitch to engage the Battalion. The green LED lights to indicate that the unit is active, and the equalizer and gate will be in effect. Push in the COMPRESSION button to engage the compressor. The blue LED will illuminate to show that the compressor is active. Press the DISTORTION footswitch to activate distortion. The red LED will light indicating the distortion is active.- CONTROLS -BYPASS Footswitch & Green LED– The right LED illuminates when the effect is engaged. The LED will not light if the Battalion is bypassed. Press the footswitch to toggle between effect on and buffered bypass mode.VOL Knob –Sets master output level of the pedal.GATE Knob – Sets the threshold for the noise gate. Turn this up to cut signal when no/little bass signal is coming through.-10dB Pad Button –Press to cut the input signal by 10dB, good for active basses or other basses with very strong output signals.EQ CONTROLS:BASS Knob –Boost or cut low end. No effect when the knob is at 50%. Boosts/cuts frequencies below 200Hz.LO MID Knob –Boost or cut low midrange frequencies. No effect when the knob is at 50%. Boost/cut at 280Hz.HI MID Knob –Boost or cut high midrange frequencies. No effect when the knob is at 50%. Boost/cut at 750Hz.TREBLE Knob– Boost or cut high end. No effect when the knob is at 50%. Boosts/cuts frequencies above 2kHz.COMPRESSOR CONTROLS:COMPRESSOR Button & Blue LED –Use this switch to engage or bypass the compressor circuit. The blue LED will illuminate when the compressor is active. If active, the blue LED will stay lit even when the entire pedal is bypassed, indicating compression will be active upon activating the pedal.COMPRESSOR Knob –Determines the intensity of the compression. Turn up to increase the compression ratio.DISTORTION CONTROLS:DRIVE (distortion) Footswitch & Red LED –Use this footswitch to engage or bypass the distortion circuit. The Left LED will illuminate when the distortion is active. If active, the LED will stay lit even when the entire pedal is bypassed, indicating distortion will be active upon activating the pedal.LEVEL Knob –Sets the output level of the distortion section.BLEND Knob –Controls mix between dry and distorted signal. Add more distortion by turning the knob up.DRIVE Knob –Affects the intensity of the distortionTONE Knob –Cuts the high end from the distortion signal as you turn the knob down.DISTORTION PRE/POST/DRY EQ Switch –Determines where the distortion circuit falls in the pedal’s signal path. The Battalion has three signal flow options when distortion is active:PRE EQ –In this mode the distortion section comes right after the compressor (if active) and before the EQ. The dry signal blended in with the BLEND knob is the same signal that is fed into the beginning of the distortion section. In this mode the EQ can heavily affect the tonal character of the distorted signal.POST EQ – In this mode the EQ comes right after compressor (if active) and before the distortion. The dry signal blended in with the BLEND knob is the same signal fed into the beginning of the distortion section, which is the output of the EQ section. The EQ’s effect on the distorted signal’s tonal character is less noticeable in this mode, but boosting certain frequency areas can drive the distortion section, affecting the amount of distortion.DRY EQ –In this mode, the distortion section comes right after the compressor (if active), but only the dry signal that is blended in with the BLEND knob is affected by the EQ. The distorted part of the signal is not affected by the EQ at all. In this mode you can heavily EQ the dry signal while leaving the distorted signal untouched, giving the option to simulate dual-amp or dual-channel bass setups. Either use the BLEND knob to mix between two distinct bass tones, or leave BLEND at max and use the DISTORTION footswitch as a pseudo channel switcher.DISTORTION MODES (SIGNAL FLOW):The following signal flow charts illustrate the three distortion modes. Thesecharts assume that the compressor is active – if it is inactive that block is simply bypassed (replaced by your dry bass signal). In all modes, the gate’sdetector comes before the compressor, right at the input to ensure the gateopens responsively, while the gate itself comes after all other processing, to mute any possible noise picked up through the signal chain. The main VOL knob is a master volume, also coming at the end of the signal chain.Pre-EQPost-EQ Dry-EQJACKS, XLR CONTROLS, POWERINPUT Jack– Plug your instrument or the output of another effects pedal into this ¼” jack. The input impedance is 2.2MΩ.DRY OUTPUT Jack –Use this ¼” jack to output a dry, unaffected version of your bass signal.OUTPUT Jack –Use this ¼” jack to output the signa l, dry or affected based on the bypass status. Plug this jack into an amp, another effects pedal, or plug headphones into this jack. The output impedance is 220Ω.XLR Jack –Use this to output a balanced signal.XLR VOL Knob –Use this to set the volume of the XLR output.XLR Bypass Button –Push in to have the XLR output the signal based on the bypass state of the pedal. Leave out to output the dry signal regardless of the bypass state of the pedal.Ground Lift Button –Push in to keep ground connected to pin 1 of the XLR jack. Leave out to disconnect pin 1 from ground.9V Power Jack– Plug the output of the factory-supplied EHX9.6DC 200mA AC adapter into the 9V power jack located at the top of the Battalion. The Battalion draws 100mA at 9VDC with a center negative plug. The Battalion accepts Boss® and Ibanez® style AC Adapters capable of delivering at least 200mA.- WARRANTY INFORMATION -Please register online at /product-registration or complete and return the enclosed warranty card within 10 days of purchase. Electro-Harmonix will repair or replace, at its discretion, a product that fails to operate due to defects in materials or workmanship for a period of one year from date of purchase. This applies only to original purchasers who have bought their product from an authorized Electro-Harmonix retailer. Repaired or replaced units will then be warranted for the unexpired portion of the original warranty term.If you should need to return your unit for service within the warranty period, please contact the appropriate office listed below. Customers outside the regions listed below, please contact EHX Customer Service for information on *******************************+AandCanadian customers: please obtain a Return Authorization Number (RA#) from EHX Customer Service before returning your product. Include ̶with your returned unit ̶a written description of the problem as well as your name, address, telephone number, e-mail address, RA# and a copy of your receipt clearly showing the purchase date.United States & Canada EuropeEHX CUSTOMER SERVICE JOHN WILLIAMSELECTRO-HARMONIX ELECTRO-HARMONIX UKc/o NEW SENSOR CORP. 13 CWMDONKIN TERRACE47-50 33RD STREET SWANSEA SA2 0RQLONG ISLAND CITY, NY 11101 UNITED KINGDOMTel: 718-937-8300 Tel: +44 179 247 3258Email:************Email:*********************************To hear demos of all EHX pedals visit us on the web at Email us at ************- FCC COMPLIANCE -This device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions: (1) This device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation. If the device is not installed and used in accordance with the instructions, it may cause harmful interference to radio communications and void the user's authority to guarantee the equipment.Note: This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:•Reorient or relocate the receiving antenna.•Increase the separation between the equipment and receiver.•Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.•Consult the dealer or an experienced radio/TV technician for help.Modifications not expressly approved by the manufacturer could void the user's authority to operate the equipment under FCC rules.。
avid venue 12.2 手册- 使用单机软件说明书

Chapter 24: Using the Standalone SoftwareVENUE Standalone software lets you do all of the following to preconfigure performances, wherever you can use your lap-top:•Learn the basics of the VENUE software interface in prep-aration for working at a full VENUE system. •Assign hardware I/O and routing, and name channels.•Set channel input, EQ, dynamics, pan, and other set-tings. •Create and maintain a library of setups, with access to nearly all parameters available on the control surface. •Store and recall Snapshots, and configure Events.•Use the Filing features to transfer Shows, Shows Folders, and plug-in presets to/from a compatible USB storage de-vice to transfer data between the standalone software and VENUE.Differences Between Standalone Software and a VENUE SystemThe Standalone software is nearly identical to that on a full VENUE system, with the following differences:Audio ThroughputYou cannot play audio through the Standalone software. Real-time audio requires the VENUE hardware.Plug-In EditingWhen a Show is transferred from a complete VENUE system, all plug-ins installed on the D-Show system are visible in the Standalone software as offline (unavailable) plug-ins. You can assign offline plug-ins to racks, and assign plug-in rack routing in the Standalone software, and save the routing in snapshots.Hardware ConfigurationIn the Standalone software, you can simulate the hardware configuration of a destination system from the Devices tab of the Options page.System RequirementsThe following are the minimum system requirements for us-ing the VENUE Standalone software:•Computer running Windows XP Pro or XP HomeEdition O/S, Service Pack 1 (Macintosh not supported)•Minimum 1024 x 768 screen resolution•Minimum 16-bit color graphics, 32-bit recommended •Minimum 256 MB RAM, 512 MB recommended •Minimum 200 MB of available hard disk space, 512 MB recommended •CD-ROM drive for installation (unless installing from web-download)•Available USB 1.1 or 2.0 port and compatible USB storage device (such as a flash disk, key disk or other external hard drive) for file transfer Installation requires Windows Administrator permissions. Once installed, the software can be run under Admin or User accounts.Installing the Standalone SoftwareTo install the VENUE Standalone software:1 Do one of the following:•Download the VENUE Standalone Software Installer from the website ().– or –•Insert your VENUE Software Installer into the CD-ROM drive on your Windows XP-compatible computer.2 Launch the installer and follow the instructions on-screen.The VENUE Standalone software requires no authorization.Removing the Standalone SoftwareTo remove the VENUE Standalone software:1 Launch the Add/Remove Programs Control Panel.2 Choose VENUE , then follow the instructions on-screen.Transferring data must be done to/from a compatible USB storage device such as a USB key disk or other external USB hard drive.You cannot install plug-ins or adjust plug-in parametersunless you are working on the complete VENUE system.Simulating a VENUE ConfigurationYou can use the Standalone software to simulate a VENUE sys-tem with any number of input and outputs. The correspond-ing inputs and outputs become available in the Patchbay, al-lowing you to prepare a show that can transfer directly to the destination system.To simulate a VENUE system:1 Launch the Standalone software.2 Go to the Options page and click the Devices tab.3 Right-click the console graphic and choose the type of con-sole you will be working with.4 Right-click an I/O graphic and choose the type of I/O (as available) and specify the number of Input and Output cards on the destination system.Transfer and Filing Quick StartThe basic steps for using the Standalone software and data transfer are as follows:•Save data to disk, then transfer it to an external USB storage device.•Transfer data from the USB device, then load the data. Save and Transfer Data from aVENUE SystemTo save and transfer data from the complete system:1 Connect a USB storage device to a VENUE USB port.2 Use the Save tab of the Filing page to save VENUE data to disk.3 Go to the Filing page and click the Transfer tab.4 Do one of the following to select the type of data to transfer:•To transfer all data, click the Console icon.•To transfer Console Settings, click the Settings icon.•To transfer Show Folders, click the Show Folders icon.•To transfer individual Shows, click the Shows icon.•To transfer Preset Folders, click the Preset Folders i con.•To transfer Presets for individual items, click the Built-In icon or the Plug-In i con and choose a processor, plug-in or Input Channel Presets item from the pop-up menu, orclick the Scope Sets icon.5 In the left column, select the items you want to transfer from VENUE to the portable storage device.6 Click the Transfer button.Adding Stage Rack inputs and outputsFor complete instructions on transferring data, see Chapter20, “Shows and File Management.”Transferring Show files from VENUETransfer and Load Data to theStandalone Software1 Connect the USB storage device to your laptop. Make sure the drive is mounted before proceeding.2 Launch the VENUE standalone software.3 Go to the Filing page and click the Transfer tab.4 Make sure your USB disk is available in the list at right.5 Click the Console, Settings, Show Folders, Shows, Preset Fold-ers, Built-In, Plug-In or Scope Set selectors to select the type of data you want to transfer.6 Click the Transfer button. The data is transferred from the USB device to the appropriate VENUE data folders on the lap-top.7 If you chose Console, data is automatically loaded and ap-plied. If you chose any other data type, go to the Filing page and click the Load tab, and load the newly transferred data into the Standalone software.Creating and Editing Shows and PresetsUse the techniques explained throughout this guide to assign routing, rename channels, and to configure other parameters. Then do the following to save and transfer your work to a complete system.To save and transfer VENUE data from the standalone software to the complete system:1 Connect a USB storage device to an available USB port on your laptop.2 Using the Save tab of the Filing page, save data to disk.3 Go to the Filing page and click the Transfer tab, and transfer saved data to a compatible USB storage device.4 Connect the USB storage device to an available USB port on the complete system.5 Use the Transfer tab of the Filing page to transfer the VENUE data from the USB storage device.6 Use the Load tab of the Filing page to load the transferred data.CD TransferThe VENUE system provides a CD-ROM drive that can also be used as a source device for VENUE data transfer. (You cannot write data to the FOH Rack CD-ROM drive; it is read-only.)To use a CD for transfer:1 Using the Standalone software on a laptop or other com-puter, create and save a show.2 Locate the VENUE data folder on the system drive.3 Copy that folder and its contents to a CD-ROM. Make sure the folder is at the root level of the CD-ROM.4 Burn or write the disc as a Windows-compatible CD-ROM.5 Insert the CD-ROM into a VENUE CD-ROM drive.6 In the Filing screen, select the CD-ROM drive as the source for file transfer.7 When the transfer is complete, eject the CD-ROM.Transferring a Scope Set for the standalone softwareClickLeaving a disc in the CD-ROM drive of a VENUE systemcan slow down the response of some software screens, so itis recommended that you not leave any disc in the drive dur-ing a performance. This only applies to a VENUE CD-ROMdrive (not the laptop on which you’re running the stand-alone software).Exporting System Information and Patchbay InformationWith Standalone software, a complete system description and/or the contents of each Patchbay page can be exported to a text file. These can be useful for generating an input list (line list) directly from the system. For example, build and custom-ize the Patchbay for an upcoming show, then export and print the channel names list for use during sound check. To print a system description:1 Go to the Options > System tab.2 Click the Info button and follow the on-screen instructionsto print a complete system description.For more information, see “VENUE System Information Ex-port” on page 110. To export Patchbay names:1 Go to the Patchbay page you want to export.2 Click the Export Patch List icon in the upper right corner ofthe screen.The Patchbay names appear in an open HTML file that you can save and print, or open in an HTML-compatible applica-tion for formatting or other modification. For more informa-tion, see “Patch List Export” on page 111.Export Patch List buttonClick to export as HTML。
NETGEAR GS305v3和GS308v3无管理5 8口巨量以太网开关安装指南说明书
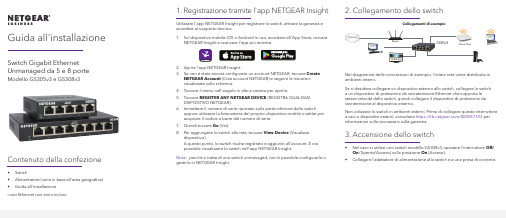
Guida all'installazione Switch Gigabit Ethernet Unmanaged da 5 e 8 porte Modello GS305v3 e GS308v3Contenuto della confezione• Switch• Alimentatore (varia in base all'area geografica)• Guida all'installazionei cavi Ethernet non sono inclusi.1. Registrazione tramite l'app NETGEAR InsightUtilizzare l'app NETGEAR Insight per registrare lo switch, attivare la garanzia eaccedere al supporto tecnico.1. Sul dispositivo mobile iOS o Android in uso, accedere all'App Store, cercareNETGEAR Insight e scaricare l'app più recente.2. Aprire l'app NETGEAR Insight.3. Se non è stato ancora configurato un account NETGEAR, toccare CreateNETGEAR Account (Crea account NETGEAR) e seguire le istruzionivisualizzate sullo schermo.4. Toccare il menu nell'angolo in alto a sinistra per aprirlo.5. Toccare REGISTER ANY NETGEAR DEVICE (REGISTRA QUALSIASIDISPOSITIVO NETGEAR).6. Immettere il numero di serie riportato sulla parte inferiore dello switchoppure utilizzare la fotocamera del proprio dispositivo mobile o tablet peracquisire il codice a barre del numero di serie.7. Quindi toccare Go (Vai).8. Per aggiungere lo switch alla rete, toccare View Device (Visualizzadispositivo).A questo punto, lo switch risulta registrato e aggiunto all'account. È orapossibile visualizzare lo switch nell'app NETGEAR Insight.Nota: poiché si tratta di uno switch unmanaged, non è possibile configurarlo ogestirlo in NETGEAR Insight.2. Collegamento dello switchNel diagramma delle connessioni di esempio, l'intera rete viene distribuita inambienti interni.Se si desidera collegare un dispositivo esterno allo switch, collegare lo switcha un dispositivo di protezione da sovratensione Ethernet che supporta lestesse velocità dello switch, quindi collegare il dispositivo di protezione dasovratensione al dispositivo esterno.Non utilizzare lo switch in ambienti esterni. Prima di collegare questo interruttorea cavi o dispositivi esterni, consultare https:///000057103 perinformazioni sulla sicurezza e sulla garanzia.3. Accensione dello switch• Nel caso si utilizzi uno switch modello GS308v3, spostare l'interruttore Off/On (Spento/Acceso) sulla posizione On (Acceso).•Collegare l'adattatore di alimentazione allo switch e a una presa di corrente.Access PointRouterGS305v3Collegamenti di esempioNETGEAR, Inc.piazza della Repubblica 32 20124 Milano NETGEAR INTL LTDFloor 1, Building 3, University Technology Centre Curraheen Road, Cork,T12EF21, Irlanda© NETGEAR, Inc. NETGEAR e il logo NETGEAR sono marchi di NETGEAR, Inc. Qualsiasi marchio non‑NETGEAR è utilizzato solo come riferimento.Supporto e CommunityVisita /support per trovare le risposte alle tue domande e accedere agli ultimi download.Puoi cercare anche utili consigli nella nostra Community NETGEAR, visitando la pagina .Conformità normativa e note legaliPer la conformità alle normative vigenti, compresa la Dichiarazione di conformità UE, visitare il sito Web https:///about/regulatory/.Prima di collegare l'alimentazione, consultare il documento relativo alla conformità normativa.I LED indicano lo stato.LED DescrizionePower (Alimentazione)• Acceso. Lo switch è collegato all'alimentazione.• Spento. Lo switch non è collegato all'alimentazione.Porta• Verde senza intermittenza. Lo switch ha rilevato uncollegamento con un dispositivo acceso su questa porta.• Lampeggia in verde. La porta invia o riceve traffico.• Spento. Lo switch non rileva nessun collegamento suquesta porta.Aprile 2020。
GridVis-Basic 电力分析仪产品说明书

1Network visualisation software• GridVis ®-Basic (in the scope of supply)3 digital inputs/outputs•Usable as either inputs or outputs•Switch output•Threshold value output •Logic output•Remote via Modbus / ProfibusT emperature measurement •PT100, PT1000, KTY83, KTY84Interfaces •RS485•Ethernet•SNTP •TFTP•BACnet (optional)Networks• T N, T T , IT networks•3 and 4-phase networks•Up to 4 single-phase networksMeasured data memory •256 MB Flash• H armonics up to 40th harmonic •Rotary field components•Distortion factor T HD-U / T HD-I2 analogue inputs • A nalogue, temperature or residual current input (RCM)Residual current measurement BACnet (optional)HomepageAlarm managementMemory 256 MB Ethernet-Modbus gateway2• M easurement, monitoring and checking of electrical characteristics in energy distribution systems • R ecording of load profiles in energy management systems (e.g. ISO 50001)• Acquisition of the energy consumption for cost centre analysis • M easured value transducer for building management systems or PLC (Modbus)• M onitoring of power quality characteristics, e.g. harmonics up to 40th harmonic • R esidual current monitoring (RCM)Areas of applicationMain featuresUniversal meter• O perating current monitoring for general electrical parameters • H igh transparency through a multi-stage and scalable measurement system in the field of energy measurement • A cquisition of events through continuous measurement with 200 ms high resolutionRCM device• C ontinuous monitoring of residual currents (Residual Current Monitor, RCM)• A larming in case a preset threshold fault current reached • N ear-realtime reactions for triggering countermeasures • P ermanent RCM measurement for systems in permanent operation without the opportunity to switch offEnergy measurement device•Continuous acquisition of the energy data and load profiles • E ssential both in relation to energy efficiency and for the safe design of power distribution systemsHarmonics analyser / event recorder• Analysis of individual harmonics for current and voltage •Prevention of production downtimes•Significantly longer service life for equipment • R apid identification and analysis of power quality fluctuations by means of user-friendly tools (GridVis ®)Fig.: UMG 96RM-E with residual current monitoring via measuring inputs I5 / I6Fig.: Event logger: Voltage dip in the low voltage distribution system3Extensive selection of tariffs• 7 tariffs each for effective energy (consumption, delivery and without backstop)• 7 tariffs each for reactive energy (inductive, capacitive and without backstop)•7 tariffs for apparent energy •L1, L2 and L3, for each phaseHighest possible degree of reliability•Continuous leakage current measurement • H istorical data: Long-term monitoring of the residual current allows changes to be identified in good time, e.g. insulation faults•Time characteristics: Recognition of time relationships •Prevention of neutral conductor carryover • R CM threshold values can be optimized for each individual case: Fixed, dynamic and stepped RCM threshold value • M onitoring of the CGP (central ground point) and the sub-distribution panelsAnalysis of fault current events• E vent list with time stamp and values•Presentation of fault currents with characteristic and duration • R eproduction of phase currents during the fault current surge • P resentation of the phase voltages during the fault current surgeAnalysis of the harmonic fault current components•Frequencies of the fault currents (fault type)•Current peaks of the individual frequency components in A and %•Harmonics analysis up to 40th harmonic •Maximum values with real-time bar displayDigital IOs• E xtensive configuration of IOs for intelligent integration, alarmand control tasksFig.: Continuous leakage current measurementFig.: Analysis of fault current eventsFig.: Analysis of the harmonic fault current components4Dimension diagramsAll dimensions in mmSide viewRear viewEthernet (TCP/IP)- / Homepage- / Ethernet-Modbus gateway functionality•Simple integration into the network •More rapid and reliable data transfer •Modern homepage • W orld-wide access to measured values by means of standard web browsers via the device's inbuilt homepage • Access to measurement data via various channels • R eliable saving of measurement data possible over a very long periods of time in the 256 MByte measurement data memory • C onnection of Modbus slave devices via Ethernet-ModbusgatewayFig.: Ethernet-Modbus gateway functionalityMeasuring device homepage• W ebserver on the measuring device, i.e. device's own homepage •Remote operation of the device display via the homepage •Comprehensive measurement data incl. PQ • O nline data directly available via the homepage, historic data optional via the APP measured value monitor, 51.00.246Fig.: Illustration of the online data via the device's inbuilt homepageCut out: 92+0,8 x 92+0,8 mm5Typical connectionDevice overview and technical dataFig.: Connection example residual currentmeasurement and PE monitoringFig.: Connection example with temperature and residual current measurementS2S1S2S2S1S1Digital-Eingänge/Ausgänge UMG 96RM-E (RCM)L1L2L3Spannungsmessung 3456StrommessungVersorgungs-spannung12RS4851617BAB AV e r b r a u c h e r230V/400V 50HzI 41918N282930313233343536Analog-Eingänge13141524V DC K1K2=E t h e r n e t10/100B a s e -TPCK3K4K5==37R J 450-30 mAS2S1I DIFFI 5I 6PT100S1S2S3Gruppe 1Gruppe 2V 1V 2V 3V N N/-L/+2)1)2)2)3)3)3)3)Digital inputs/outputs Power supply voltage Current measurement Measuring voltage Analog inputs L o d s Group 1Group 2Comment:For detailed technical information please refer to the operation manual and the Modbus address list.•= included - = not included *1 Inclusive UL certification.6Fig.: GridVis ®software, configuration menuComment:For detailed technical information please refer to the operation manual and the Modbus address list.• = included - = not included*2 O ptional additional functions with the packages GridVis ®-Professional, GridVis ®-Service and GridVis ®-Ultimate.7Fig.: RCM configuration, e.g. dynamicthreshold value formation, for load-dependent threshold value adaptationFig.: Summation current transformer for the acquisition of residual currents. Wide range with different configurations and sizes allow use in almost all applicationsMeasurement surge voltage Power consumption Overload for 1 sec.Sampling frequency per channel (50 / 60 Hz)Residual current inputAnalogue inputsMeasurement range, residual current input*Digital outputsSwitching voltage Switching current Response timePulse output (energy pulse)Comment:For detailed technical information please refer to the operation manual and the Modbus address list.•= included - = not included*3 E xample of residual current input 30 mA with 600/1 residual current transformer: 600 x 30 mA = 18,000 mA *4A ccurate device dimensions can be found in the operation manual.8Comment:For detailed technical information please refer to the operation manual and the Modbus address list.• = included - = not included。
tpo35三篇阅读原文译文题目答案译文背景知识
tpo35三篇阅读原文译文题目答案译文背景知识阅读-1 (1)原文 (2)译文 (5)题目 (8)答案 (17)背景知识 (18)阅读-2 (21)原文 (21)译文 (24)题目 (27)答案 (36)背景知识 (36)阅读-3 (39)原文 (39)译文 (43)题目 (46)答案 (54)背景知识 (55)阅读-1原文Earth’ s Age①One of the first recorded observers to surmise a long age for Earth was the Greek historian Herodotus, who lived from approximately 480 B.C. to 425 B.C. He observed that the Nile River Delta was in fact a series of sediment deposits built up in successive floods. By noting that individual floods deposit only thin layers of sediment, he was able to conclude that the Nile Delta had taken many thousands of years to build up. More important than the amount of time Herodotus computed, which turns out to be trivial compared with the age of Earth, was the notion that one could estimate ages of geologic features by determining rates of the processes responsible for such features, and then assuming the rates to be roughly constant over time. Similar applications of this concept were to be used again and again in later centuries to estimate the ages of rock formations and, in particular, of layers of sediment that had compacted and cemented to form sedimentary rocks.②It was not until the seventeenth century that attempts were madeagain to understand clues to Earth's history through the rock record. Nicolaus Steno (1638-1686) was the first to work out principles of the progressive depositing of sediment in Tuscany. However, James Hutton (1726-1797), known as the founder of modern geology, was the first to have the important insight that geologic processes are cyclic in nature. Forces associated with subterranean heat cause land to be uplifted into plateaus and mountain ranges. The effects of wind and water then break down the masses of uplifted rock, producing sediment that is transported by water downward to ultimately form layers in lakes, seashores, or even oceans. Over time, the layers become sedimentary rock. These rocks are then uplifted sometime in the future to form new mountain ranges, which exhibit the sedimentary layers (and the remains of life within those layers) of the earlier episodes of erosion and deposition.③Hutton's concept represented a remarkable insight because it unified many individual phenomena and observations into a conceptual picture of Earth’s history. With the further assumption that these geologic processes were generally no more or less vigorous than they are today, Hutton's examination of sedimentary layers led him to realize that Earth's history must be enormous, that geologic time is anabyss and human history a speck by comparison.④After Hutton, geologists tried to determine rates of sedimentation so as to estimate the age of Earth from the total length of the sedimentary or stratigraphic record. Typical numbers produced at the turn of the twentieth century were 100 million to 400 million years. These underestimated the actual age by factors of 10 to 50 because much of the sedimentary record is missing in various locations and because there is a long rock sequence that is older than half a billion years that is far less well defined in terms of fossils and less well preserved.⑤Various other techniques to estimate Earth's age fell short, and particularly noteworthy in this regard were flawed determinations of the Sun's age. It had been recognized by the German philosopher Immanuel Kant (1724-1804) that chemical reactions could not supply the tremendous amount of energy flowing from the Sun for more than about a millennium. Two physicists during the nineteenth century both came up with ages for the Sun based on the Sun's energy coming from gravitational contraction. Under the force of gravity, the compressionresulting from a collapse of the object must release energy. Ages for Earth were derived that were in the tens of millions of years, much less than the geologic estimates of the lime.⑥It was the discovery of radioactivity at the end of the nineteenth century that opened the door to determining both the Sun’s energy source and the age of Earth. From the initial work came a suite of discoveries leading to radio isotopic dating, which quickly led to the realization that Earth must be billions of years old, and to the discovery of nuclear fusion as an energy source capable of sustaining the Sun's luminosity for that amount of time. By the 1960s, both analysis of meteorites and refinements of solar evolution models converged on an age for the solar system, and hence for Earth, of 4.5 billion years.译文地球的年龄①希腊历史学家希罗多德是最早有记录的推测地球年龄的观察家之一,他生活在大约公元前480年到公元前425年。
Volvo Trucks I-Shift 变速箱软件包说明书

The I-Shift gearbox’s functions are optimised with specially adapted softwar e packages that make the gear box even more pr actical and economical by adapting the gearshift strategies to the current transport conditions.Sales variantsBasic version (TP-BAS)TP-BAS is the standard software package supplied with the I-Shift and includes the gearbox’s basic functions for allround driving.I-Shift distribution gear changing software (TP-DIST)TP-DIST adapts the gearbox’s function to the specific con-ditions in the distribution segment. The software package includes functions that aid manoeuvrability when starting off from standstill, in manoeuvring and when driving at low speed.I-Shift construction gear changing software (TP-CON)TP-CON adapts the gearbox’s function to the specific conditions in the construction segment. The software package includes functions that aid manoeuvrability when starting off from standstill, in manoeuvring and when driving at low speed. This software can also handle tougher road conditions.I-Shift long haul gear changing software (TP-LONG)TP-LONG includes intelligent functions that minimise fuel consumption. This software package is ideal for long-haul operations where strong emphasis is placed on fuel economy. This package includes the I-Roll function.Heavy duty transport (TP-HD)TP-HD optimises I-Shift for heavy duty transport with high gross combination weights (>85 tonnes). Regardless of the gross combination weight, the driver can always optimise driv-ability by selecting or deactivating the heavy duty mode, and activating the long haul mode. The functions in the software package also offer benefits for trucks hauling multiple trailers.TP-DIST is tailored for conditions in the distribution transport segment.TP-CON is adapted for construction operations.TP-LONG is designed to rationalise long-haul transport.TP-HD is specially tailored for heavier transport operations.• Standard (•) The function can be used when TP-LONG is activated. o Option – Not available *Only AT2612D, AT2612F, ATO2612F, ATO3112F and ATO3512F.†TP-BAS and TP-LONG are the only options available for SPO2812.Sales codes for I-Shift software packagesTP-BAS I-Shift basic software packageTP-DIST I-Shift distribution gear changing software TP-CON I-Shift construction gear changing software TP-LONG I-Shift long haul gear changing softwareTP-HD I-Shift heavy duty gear changing software Sales codes for standard equipmentAPF-BASS tandard version of I-Shift, if APF-ENH isnot chosenAMSO-BAS S tandard version of I-Shift, if AMSO-AUT isnot chosenAVO-BAS S tandard version of I-Shift, if AVO-ENH isnot chosen Sales codes for available optionsAPF-ENH Enhanced I-shift PTO functions (Auto N eutral /Reverse Inhibit / Split Box Connection)AMSO-AUT I-Shift manual gear shift available inautomatic mode incl kickdown functionAVO-ENH Enhanced I-Shift software for constructionand off road applicationsI-Shift’s software packages can easily be installed and changed with the help of Volvo’s analysis and programming tool, Volvo Tech Tool. This is done by authorised dealers and workshops, where the software packages can be further customised with optional functions and customer parameters.Basic PTO Functions (APF-BAS)Facilitates power take-off operation. Pre-defined splitter gear positions determine which splitter gear is used when one or two gearbox power take-offs are engaged.Because gear selection is matched to the engine speed limit, it is possible to set parameters for the software. The gear selection is then adapted to any engine speed limits imposed by body-builder functions.Enhanced PTO Functions (APF–ENH)Several functions that aid power take-off operation. I-Shift’s power take-off functions make it possible to activate the proper-ties listed below by having the software parameters adjusted at an authorised workshop.Auto NeutralOn command, the driveline is disconnected from the bodybuilder control unit, regardless of the gear lever’s position, when Auto Neutral is activated.Reverse InhibitWhen the bodybuilder control unit issues the Reverse Inhibit command, the reverse gears are blocked by the transmission system.Connection of splitter boxAllows connection of a splitter box for operation of high-capacity power take-offs. Direct gear is activated when the bodybuilder module is put in splitter box mode. It is also possible to use all high range gears. Please look into the body builder instructions.Basic Gear Selection Adjustment (AMSO-BAS) Allows the driver to adjust gear selection with the gear lever buttons during engine braking in Automatic mode (gear selec-tor position A).Enhanced Gear Selection Adjustment, incl. Kickdown (AMSO–AUT)This function allows both the automatically selected starting gear and the driving gear in Automatic mode to be adjusted by activating the plus/minus button on the gear lever. Arrow sym-bols in the driver information display show the available gears. There is also a function that facilitates speed adjustment when the vehicle is idling or driving very slowly, for instance in traffic queues. The gears can also be shifted upwards since engine speed is automatically increased before upshifts. The kickdown function selects a gear for maximum accelera-tion. When the kickdown switch on the accelerator pedal is engaged, the system changes the gearshift strategy to maximise vehicle acceleration. When suitable (e.g. depending on engine speed), this leads to a downshift.K ickdown only works in Economy mode to prevent accidental activation during off-road driving.Basic Vocational Functions (AVO-BAS)Allows the driver to choose between the Economy and Perfor-mance driving modes.Enhanced Performance – Bad Roads (AVO–ENH) This optional package is specially adapted to the specific conditions of the construction and timber transport segments. The P+ Performance mode includes various functions that adapt gearshifts and gear selection to poor driving surfaces and hilly gradients. It also includes functions that facilitate starting from standstill in poor driving conditions.P + is designed to minimise the number of gearshifts required. This is useful during off-road driving. It prevents wheels from spinning out when torque is increased after a gearshift, and prevents missed gearshifts, for example if the road gradient changes sharply. High engine power (high revs) is often required when driving uphill.If the driver speeds up before a hill and then changes gears, the truck may not gain enough speed.The driver can also influence the maximum number of downshifts.This is very useful when you shift to a lower gear on a very steep uphill gradient and only want to shift once to a gear strong enough to take you all the way up. Both Economy, Performance an P+ are now available.Summary of the functions in the package:• Engine revs are increased as necessary to provide extra torque when starting off from standstill.• Larger margins before upshifts ensure safer driving if the gradient changes.• Gear selection is adapted to minimise the number of gear-shifts and run at slightly higher revs (also available with Economy mode).• Functions that make it easier to keep the same gear when the• accelerator pedal position and road gradient change.• The package enables multiple downshifts. This facilitates gearshifts when driving up steep slopes.• Includes a function that speeds up clutch release and makes it easier to rock the vehicle out of trouble if it gets stuck on a soft surface.• When moving the gear lever, the driver can choose the gear that provides the highest possible engine speed.AVO-ENH can be combined with the Heavy Duty Transport program (TP-HD) without any problem. The AVO-ENH func-tions will only be active when the HD-mode is not active and when the Power mode is selected.Basic Shift StrategyAutomatic selection of correct starting gear (1st – 6th gear). The choice of starting gear is determined by gross vehicle weight and road gradient.Performance ShiftGives faster, gentler shifts through intelligent utilisation of the engine’s compression brake (VEB brakes), the vehicle’s clutch and a special gearbox brake.Gearbox Oil Temperature MonitorContinuously shows the gearbox oil temperature in the infor-mation display.Heavy Start EngagementFor start-up with high revs in Performance mode in 1st gear, resulting in higher starting torque. This function raises the revs to facilitate heavy starts. This is useful, for instance, if the truck is stuck in soft ground.I-RollAutomatic activation and deactivation of a freewheel function in order to cut fuel consumption, which can be reduced by up to several percent. I-Roll is used when neither engine power nor engine braking is needed, for instance on flat roads. When driving with cruise control, I-Roll runs at roughly 1–3 km/h be-low the pre-set speed, which saves fuel. The longer the vehicle drives using I-Roll, the more fuel is saved.Smart Cruise ControlInteracts with the vehicle’s Brake Cruise and ensures that the auxiliary brakes are not activated unnecessarily. The auxiliary brakes are deactivated on downhill stretches to save fuel. This allows increased use of the freewheel function, resulting in improved fuel efficiency.Launch Control4Optimises gear selection and EBS functions when manoeuvring at low speeds. Manoeuvring is facilitated because the EBS brakes are automatically engaged when the truck changes direction. This also ensures that the Hill Start Aid function is only activated on uphill gradients.It is possible to drive the vehicle forward with the idle regulator. This saves unnecessary downshifts and makes it easier to adjust the vehicle’s speed, for instance when driving in traffic queues. Enhanced Shift Strategy1By interacting with EBS2 and ECS3, both starting and ma-noeuvring are made easier.This brake mode maximises VEB/VEB+/retarder braking effects by automatically selecting the appropriate gear so the engine runs at high revs. This function compensates for the engine brake when changing gears in brake mode.When changing gears during engine braking, the wheel brakes are activated to compensate for braking moment. This raises braking power and provides smoother gearshifts.Interaction with the braking systems increases safety by preventing the truck from accelerating during gearshifts on steep slopes when braking mode is activated.Heavy Duty GCW Control5Optimises gear selection for high gross combination weights (85 t < GCW ≤ 180 t). This function improves driveability and fuel economy in the heavy duty transport segment. Heavy Duty GCW Control gives the driver access to the HD (Heavy Duty) driving mode.In HD mode, 1st gear is used as the starting gear and gear selection is adapted to heavier gross combination weights. The gearshifts generally occur at higher revs. HD is activated and deactivated by pressing and holding the E/P button on the gear selector for about 3 seconds. The chosen driving mode remains selected when the engine is turned off.Among other things, the TP-HD function selects the start-ing gear to suit the gross combination weight, thereby saving the clutch. The entire gear range is utilised, and the gears are changed consistently at high revs to maintain torque and driving comfort.When driving with low gross combination weights or without a load, it is easy to deactivate the HD driving mode and return to Economy mode. After this, the driver can switch between Economy and Performance modes. This ensures comfortable and fuel-efficient driving.1 Full functionality requires EBS-MED.2 EBS = Disc Brakes with Electronically controlled Brake System (EBS-STD / EBS-MED)3 ECS = Electronically Controlled Suspension (SUSPL-EC).4 Full functionality requires EBS and ECS.5 Available only with certain engine/gearbox combinations. Customer parametersI-Shift also has many options for setting customer parameters that optimise the vehicle’s driving properties in special applica-tions and special transport segments. For instance, the starting gear can be optimised according to the transport conditions. Power take-off operation can also be customised. Customised settings and reprogramming of I-Shift are car-ried out at authorised workshops using the Volvo Tech Tool.Volvo retains the right to modify design and specifications without prior notification.。
Accurate Passive Location Estimation Using TOA Measurements
Accurate Passive Location Estimation Using TOA MeasurementsJunyang Shen,Andreas F.Molisch,Fellow,IEEE,and Jussi Salmi,Member,IEEEAbstract—Localization of objects is fast becoming a major aspect of wireless technologies,with applications in logistics, surveillance,and emergency response.Time-of-arrival(TOA) localization is ideally suited for high-precision localization of objects in particular in indoor environments,where GPS is not available.This paper considers the case where one transmitter and multiple,distributed,receivers are used to estimate the location of a passive(reflecting)object.It furthermore focuses on the situation when the transmitter and receivers can be synchronized,so that TOA(as opposed to time-difference-of-arrival(TDOA))information can be used.We propose a novel, Two-Step estimation(TSE)algorithm for the localization of the object.We then derive the Cramer-Rao Lower Bound(CRLB) for TOA and show that it is an order of magnitude lower than the CRLB of TDOA in typical setups.The TSE algorithm achieves the CRLB when the TOA measurements are subject to small Gaussian-distributed errors,which is verified by analytical and simulation results.Moreover,practical measurement results show that the estimation error variance of TSE can be33dB lower than that of TDOA based algorithms.Index Terms—TOA,TDOA,location estimation,CRLB.I.I NTRODUCTIONO BJECT location estimation has recently received inten-sive interests for a large variety of applications.For example,localization of people in smoke-filled buildings can be life-saving[1];positioning techniques also provide useful location information for search-and-rescue[2],logistics[3], and security applications such as localization of intruders[4].A variety of localization techniques have been proposed in the literature,which differ by the type of information and system parameters that are used.The three most important kinds utilize the received signal strength(RSS)[5],angle of arrival(AOA)[6],and signal propagation time[7],[8],[9], respectively.RSS algorithms use the received signal power for object positioning;their accuracies are limited by the fading of wireless signals[5].AOA algorithms require either directional antennas or receiver antenna arrays1.Signal-propagation-time based algorithms estimate the object location using the time it takes the signal to travel from the transmitter to the target and from there to the receivers.They achieve very accurate Manuscript received April15,2011;revised September28,2011and Jan-uary18,2012;accepted February12,2012.The associate editor coordinating the review of this paper and approving it for publication was X.Wang.J.Shen and A.F.Molisch are,and J.Salmi was with the Department of Electrical Engineering,Viterbi School of Engineering,University of Southern California(e-mail:{junyangs,molisch,salmi}@).J.Salmi is currently with Aalto University,SMARAD CoE,Espoo,Finland.This paper is partially supported by the Office of Naval Research(ONR) under grant10599363.Part of this work was presented in the IEEE Int.Conference on Ultrawide-band Communications2011.Digital Object Identifier10.1109/TWC.2012.040412.1106971Note that AOA does not provide better estimation accuracy than the signal propagation time based methods[10].estimation of object location if combined with high-precision timing measurement techniques[11],such as ultrawideband (UWB)signaling,which allows centimeter and even sub-millimeter accuracy,see[12],[13],and Section VII.Due to such merits,the UWB range determination is an ideal candidate for short-range object location systems and also forms the basis for the localization of sensor nodes in the IEEE802.15.4a standard[14].The algorithms based on signal propagation time can be fur-ther classified into Time of Arrival(TOA)and Time Difference of Arrival(TDOA).TOA algorithms employ the information of the absolute signal travel time from the transmitter to the target and thence to the receivers.The term“TOA”can be used in two different cases:1)there is no synchronization between transmitters and receivers and then clock bias between them exist;2)there is synchronization between transmitters and receivers and then clock bias between them does not exist. In this paper,we consider the second situation with the synchronization between the transmitter and receivers.Such synchronization can be done by cable connections between the devices,or sophisticated wireless synchronization algo-rithms[15].TDOA is employed if there is no synchronization between the transmitter and the receivers.In that case,only the receivers are synchronized.Receivers do not know the signal travel time and therefore employ the difference of signal travel times between the receivers.It is intuitive that TOA has better performance than the TDOA,since the TDOA loses information about the signal departure time[7].The TDOA/TOA positioning problems can furthermore be divided into“active”and“passive”object cases.“Active”means that the object itself is the transmitter,while“passive”means that it is not the transmitter nor receiver,but a separate (reflecting/scattering)object that just interacts with the signal stemming from a separate transmitter2.There are numerous papers on the TOA/TDOA location estimation for“active”objects.Regarding TDOA,the two-stage method[16]and the Approximate Maximum Likelihood Estimation[17]are shown to be able to achieve the Cramer-Rao Lower Bound(CRLB)of“active”TDOA[8].As we know,the CRLB sets the lower bound of the estimation error variance of any un-biased method.Two important TOA methods of“active”object positioning are the Least-Square Method[18]and the Approximate Maximum Likelihood Es-timation Method[17],both of which achieve the CRLB of “active”TOA.“Active”object estimation methods are used, e.g,for cellular handsets,WLAN,satellite positioning,and active RFID.2The definitions of“active”and“passive”here are different from those in radar literature.In radar literature,“passive radar”does not transmit signals and only detects transmission while“active radar”transmits signals toward targets.1536-1276/12$31.00c 2012IEEE“Passive”positioning is necessary in many practical situa-tions like crime-prevention surveillance,assets tracking,and medical patient monitoring,where the target to be localized is neither transmitter nor receiver,but a separate(reflect-ing/scattering)object.The TDOA positioning algorithms for “passive”objects are essentially the same as for“active”objects.For TOA,however,the synchronization creates a fundamental difference between“active”and“passive”cases. Regarding the“passive”object positioning,to the best of our knowledge,no TOA algorithms have been developed.This paper aims tofill this gap by proposing a TOA algorithm for passive object location estimation,which furthermore achieves the CRLB of“passive”TOA.The key contributions are:•A novel,two step estimation(TSE)method for the passive TOA based location estimation.It borrows an idea from the TDOA algorithm of[16].•CRLB for passive TOA based location estimation.When the TOA measurement error is Gaussian and small,we prove that the TSE can achieve the CRLB.Besides,it is also shown that the estimated target locations by TSE are Gaussian random variables whose covariance matrix is the inverse of the Fisher Information Matrix(FIM)related to the CRLB.We also show that in typical situations the CRLB of TOA is much lower than that of TDOA.•Experimental study of the performances of TSE.With one transmitter and three receivers equipped with UWB antennas,we perform100experimental measurements with an aluminium pole as the target.After extracting the signal travel time by high-resolution algorithms,the location of the target is evaluated by TSE.We show that the variance of estimated target location by TSE is much (33dB)lower than that by the TDOA method in[16]. The remainder of this paper is organized as follows.Section II presents the architecture of positioning system.Section III derives the TSE,followed by comparison between CRLB of TOA and TDOA algorithms in Section IV.Section V analyzes the performance of TSE.Section VI presents the simulations results.Section VII evaluates the performance of TSE based on UWB measurement.Finally Section VIII draws the conclusions.Notation:Throughout this paper,a variable with“hat”ˆ•denotes the measured/estimated values,and the“bar”¯•denotes the mean value.Bold letters denote vectors/matrices. E(•)is the expectation operator.If not particularly specified,“TOA”in this paper denotes the“TOA”for a passive object.II.A RCHITECTURE OF L OCALIZATION S YSTEMIn this section,wefirst discuss the challenges of localization systems,and present the focus of this paper.Then,the system model of individual localization is discussed.A.Challenges for target localizationFor easy understanding,we consider an intruder localization system using UWB signals.Note that the intruder detection can also be performed using other methods such as the Device-free Passive(DfP)approach[19]and Radio Frequency Identification(RFID)method[20].However,both the DfP and RFID methods are based on preliminary environmental measurement information like“Radio Map Construction”[19] and“fingerprints”[20].On the other hand,the TOA based approach considered in our framework does not require the preliminary efforts for obtaining environmental information. With this example,we show the challenges of target po-sitioning system:Multiple Source Separation,Indirect Path Detection and Individual Target Localization.The intruder detection system localizes,and then directs a camera to capture the photo of the targets(intruders).This localization system consists of one transmitter and several receivers.The transmitter transmits signals which are reflected by the targets,then,the receivers localize the targets based on the received signals.Multiple Source Separation:If there are more than one intruders,the system needs to localize each of them.With multiple targets,each receiver receives impulses from several objects.Only the information(such as TOA)extracted from impulses reflected by the same target should be combined for localization.Thus,the Multiple Source Separation is very important for target localization and several techniques have been proposed for this purpose.In[21],a pattern recognition scheme is used to perform the Multiple Source Separation. Video imaging and blind source separation techniques are employed for target separation in[22].Indirect Path Detection:The transmitted signals are not only reflected by the intruders,but also by surrounding objects,such as walls and tables.To reduce the adverse impact of non-target objects in the localization of target, the localization process consists of two steps.In the initial/first stage,the system measures and then stores the channel impulses without the intruders.These impulses are reflected by non-target objects,which is referred to as reflectors here.The radio signal paths existing without the target are called background paths.When the intruders are present,the system performs the second measurement. To obtain the impulses related to the intruders,the system subtracts the second measurement with thefirst one. The remaining impulses after the subtraction can be through one of the following paths:a)transmitter-intruders-receivers,b)transmitter-reflectors-intruders-receivers,c) transmitter-intruders-reflectors-receivers,d)transmitter-reflectors-intruders-reflectors-receivers3.Thefirst kind of paths are called direct paths and the rest are called indirect paths.In most situations,only direct paths can be used for localization.In the literature,there are several methods proposed for indirect path identification[23],[24]. Individual Target Localization:After the Multiple Source Separation and Indirect Path Detection,the positioning system knows the signal impulses through the direct paths for each target.Then,the system extracts the characteristics of direct paths such as TOA and AOA.Based on these characteristics, the targets arefinally localized.Most researches on Individual Target Localization assumes that Multiple Source Separation and Indirect Path Detection are perfectly performed such as [16],[25]and[26].Note that the three challenges sometimes 3Note that here we omit the impulses having two or more interactions with the intruder because of the resulted low signal-to-noise radio(SNR)by multiple reflections.Cable for synchronizationFig.1.Illustration of TOA based Location Estimation System Model.are jointly addressed,so that the target locations are estimated in one step such as the method presented in [27].In this paper,we focus on the Individual Target Local-ization,under the same framework of [16],[25]and [26],assuming that Multiple Source Separation and Indirect Path Detection are perfectly performed in prior.In addition,we only use the TOA information for localization,which achieves very high accuracy with ultra-wideband signals.The method to ex-tract TOA information using background channel cancelation is described in details in [28]and also Section VII.B.System Model of Individual LocalizationFor ease of exposition,we consider the passive object (target)location estimation problem in a two-dimensional plane as shown in Fig.1.There is a target whose location [x,y ]is to be estimated by a system with one transmitter and M receivers.Without loss of generality,let the location of the transmitter be [0,0],and the location of the i th receiver be [a i ,b i ],1≤i ≤M .The transmitter transmits an impulse;the receivers subsequently receive the signal copies reflected from the target and other objects.We adopt the assumption also made in [16],[17]that the target reflects the signal into all ing (wired)backbone connections be-tween the transmitter and receivers,or high-accuracy wireless synchronization algorithms,the transmitter and receivers are synchronized.The errors of cable synchronization are negli-gible compared with the TOA measurement errors.Thus,at the estimation center,signal travel times can be obtained by comparing the departure time at the transmitter and the arrival time at the receivers.Let the TOA from the transmitter via the target to the i th receiver be t i ,and r i =c 0t i ,where c 0is the speed of light,1≤i ≤M .Then,r i = x 2+y 2+(x −a i )2+(y −b i )2i =1,...M.(1)For future use we define r =[r 1,r 2,...,r M ].Assuming each measurement involves an error,we haver i −ˆri =e i ,1≤i ≤M,where r i is the true value,ˆr i is the measured value and e i is the measurement error.In our model,the indirect paths areignored and we assume e i to be zero mean.The estimation system tries to find the [ˆx ,ˆy ],that best fits the above equations in the sense of minimizing the error varianceΔ=E [(ˆx −x )2+(ˆy −y )2].(2)Assuming the e i are Gaussian-distributed variables with zeromean and variances σ2i ,the conditional probability functionof the observations ˆr are formulated as follows:p (ˆr |z )=Ni =11√2πσi ·exp −(ˆr i −( x 2+y 2+ (x −a i )2+(y −b i )2))22σ2i,(3)where z =[x,y ].III.TSE M ETHODIn this section,we present the two steps of TSE andsummarize them in Algorithm 1.In the first step of TSE,we assume x ,y , x 2+y 2are independent of each other,and obtain temporary results for the target location based on this assumption.In the second step,we remove the assumption and update the estimation results.A.Step 1of TSEIn the first step of TSE,we obtain an initial estimate of[x,y, x 2+y 2],which is performed in two stages:Stage A and Stage B.The basic idea here is to utilize the linear approximation [16][29]to simplify the problem,considering that TOA measurement errors are small with UWB signals.Let v =x 2+y 2,taking the squares of both sides of (1)leads to2a i x +2b i y −2r i v =a 2i +b 2i −r 2i .Since r i −ˆr i =e i ,it follows that−a 2i +b 2i −ˆr 2i 2+a i x +b i y −ˆr i v=e i (v −ˆr i )−e 2i 2=e i (v −ˆr i )−O (e 2i ).(4)where O (•)is the Big O Notation meaning that f (α)=O (g (α))if and only if there exits a positive real number M and a real number αsuch that|f (α)|≤M |g (α)|for all α>α0.If e i is small,we can omit the second or higher order terms O (e 2i )in Eqn (4).In the following of this paper,we do this,leaving the linear (first order)term.Since there are M such equations,we can express them in a matrix form as followsh −S θ=Be +O (e 2)≈Be ,(5)whereh=⎡⎢⎢⎢⎢⎣−a21+b21−ˆr212−a22+b22−ˆr222...−a2M+b2M−ˆr2M2⎤⎥⎥⎥⎥⎦,S=−⎡⎢⎢⎢⎣a1b1−ˆr1a2b2−ˆr2...a Mb M−ˆr M⎤⎥⎥⎥⎦,θ=[x,y,v]T,e=[e1,e2,...,e M]T,andB=v·I−diag([r1,r2,...,r M]),(6) where O(e2)=[O(e21),O(e22),...,O(e2M)]T and diag(a) denotes the diagonal matrix with elements of vector a on its diagonal.For notational convenience,we define the error vectorϕ=h−Sθ.(7) According to(5)and(7),the mean ofϕis zero,and its covariance matrix is given byΨ=E(ϕϕT)=E(Bee T B T)+E(O(e2)e T B T)+E(Be O(e2)T)+E(O(e2)O(e2)T)≈¯BQ¯B T(8)where Q=diag[σ21,σ22,...,σ2M].Because¯B depends on the true values r,which are not obtainable,we use B(derived from the measurementsˆr)in our calculations.From(5)and the definition ofϕ,it follows thatϕis a vector of Gaussian variables;thus,the probability density function (pdf)ofϕgivenθisp(ϕ|θ)≈1(2π)M2|Ψ|12exp(−12ϕTΨ−1ϕ)=1(2π)M2|Ψ|12exp(−12(h−Sθ)TΨ−1(h−Sθ)).Then,lnp(ϕ|θ)≈−12(h−Sθ)TΨ−1(h−Sθ)+ln|Ψ|−M2ln2π(9)We assume for the moment that x,y,v are independent of each other(this clearly non-fulfilled assumption will be relaxed in the second step of the algorithm).Then,according to(9),the optimumθthat maximizes p(ϕ|θ)is equivalent to the one minimizingΠ=(h−Sθ)TΨ−1(h−Sθ)+ln|Ψ|. IfΨis a constant,the optimumθto minimizeΠsatisfies dΠdθθ=0.Taking the derivative ofΠoverθ,we havedΠdθθ=−2S TΨ−1h+2S TΨ−1Sθ.Fig.2.Illustration of estimation ofθin step1of TSE.Thus,the optimumθsatisfiesˆθ=arg minθ{Π}=(S TΨ−1S)−1S TΨ−1h,(10)which provides[ˆx,ˆy].Note that(10)also provides the leastsquares solution for non-Gaussian errors.However,for our problem,Ψis a function ofθsince Bdepends on the(unknown)values[x,y].For this reason,themaximum-likelihood(ML)estimation method in(10)can notbe directly used.Tofind the optimumθ,we perform theestimation in two stages:Stage A and Stage B.In Stage A,themissing data(Ψ)is calculated given the estimate of parameters(θ).Note thatθprovides the values of[x,y]and thus thevalue of B,therefore,Ψcan be calculated usingθby(8).In the Stage B,the parameters(θ)are updated according to(10)to maximize the likelihood function(which is equivalentto minimizingΠ).These two stages are iterated until con-vergence.Simulations in Section V show that commonly oneiteration is enough for TSE to closely approach the CRLB,which indicates that the global optimum is reached.B.Step2of TSEIn the above calculations,ˆθcontains three componentsˆx,ˆy andˆv.They were previously assumed to be independent;however,ˆx andˆy are clearly not independent ofˆv.As amatter of fact,we wish to eliminateˆv;this will be achievedby treatingˆx,ˆy,andˆv as random variables,and,knowing thelinear mapping of their squared values,the problem can besolved using the LS solution.Letˆθ=⎡⎣ˆxˆyˆv⎤⎦=⎡⎣x+n1y+n2v+n3⎤⎦(11)where n i(i=1,2,3)are the estimation errors of thefirststep.Obviously,the estimator(10)is an unbiased one,and themean of n i is zero.Before proceeding,we need the following Lemma.Lemma 1:By omitting the second or higher order errors,the covariance of ˆθcan be approximated as cov (ˆθ)=E (nn T )≈(¯S T Ψ−1¯S )−1.(12)where n =[n 1,n 2,n 3]T ,and Ψand ¯S(the mean value of S )use the true/mean values of x ,y,and r i .Proof:Please refer to the Appendix.Note that since the true values of x ,y,and r i are not obtain-able,we use the estimated/measured values in the calculationof cov (ˆθ).Let us now construct a vector g as followsg =ˆΘ−G Υ,(13)where ˆΘ=[ˆx 2,ˆy 2,ˆv 2]T ,Υ=[x 2,y 2]T and G =⎡⎣100111⎤⎦.Note that here ˆΘis the square of estimation result ˆθfrom the first step containing the estimated values ˆx ,ˆy and ˆv .Υis the vector to be estimated.If ˆΘis obtained without error,g =0and the location of the target is perfectly obtained.However,the error inevitably exists and we need to estimate Υ.Recalling that v =x 2+y 2,substituting (11)into (13),and omitting the second-order terms n 21,n 22,n 23,it follows that,g =⎡⎣2xn 1+O (n 21)2yn 2+O (n 22)2vn 3+O (n 23)⎤⎦≈⎡⎣2xn 12yn 22vn 3⎤⎦.Besides,following similar procedure as that in computing(8),we haveΩ=E (gg T )≈4¯D cov (ˆθ)¯D ,(14)where ¯D =diag ([¯x ,¯y ,¯v ]).Since x ,y are not known,¯Dis calculated as ˆD using the estimated values ˆx ,ˆy from the firststep.The vector g can be approximated as a vector of Gaussian variables.Thus the maximum likelihood estimation of Υis theone minimizing (ˆΘ−G Υ)T Ω−1(ˆΘ−G Υ),expressed by ˆΥ=(G T Ω−1G )−1G T Ω−1ˆΘ.(15)The value of Ωis calculated according to (14)using the valuesof ˆx and ˆy in the first step.Finally,the estimation of target location z is obtained byˆz =[ˆx ,ˆy ]=[±ˆΥ1,± ˆΥ2],(16)where ˆΥi is the i th item of Υ,i =1,2.To choose the correct one among the four values in (16),we can test the square error as followsχ=M i =1( ˆx 2+ˆy 2+ (ˆx −a i )2+(ˆy −b i )−ˆr i )2.(17)The value of z that minimizes χis considered as the final estimate of the target location.In summary,the procedure of TSE is listed in Algorithm 1:Note that one should avoid placing the receivers on a line,since in this case (S T Ψ−1S )−1can become nearly singular,and solving (10)is not accurate.Algorithm 1TSE Location Estimation Method1.In the first step,use algorithm as shown in Fig.2to obtain ˆθ,2.In the second step,use the values of ˆx and ˆy from ˆθ,generate ˆΘand D ,and calculate Ω.Then,calculate the value of ˆΥby (15),3.Among the four candidate values of ˆz =[ˆx ,ˆy ]obtained by (16),choose the one minimizing (17)as the final estimate for target location.IV.C OMPARISON OF CRLB BETWEEN TDOA AND TOA In this section,we derive the CRLB of TOA based estima-tion algorithms and show that it is much lower (can be 30dB lower)than the CRLB of TDOA algorithms.The CRLB of “active”TOA localization has been studied in [30].The “passive”localization has been studied before under the model of multistatic radar [31],[32],[33].The difference between our model and the radar model is that in our model the localization error is a function of errors of TOA measurements,while in the radar model the localization error is a function of signal SNR and waveform.The CRLB is related to the 2×2Fisher Information Matrix (FIM)[34],J ,whose components J 11,J 12,J 21,J 22are defined in (18)–(20)as follows J 11=−E (∂2ln(p (ˆr |z ))∂x 2)=ΣM i =11σ2i (x −a i (x −a i )2+(y −b i )2+xx 2+y2)2,(18)J 12=J 21=−E (∂2ln(p (ˆr |z ))∂x∂y )=ΣM i =11σ2i (x −a i (x −a i )2+(y −b i )2+x x 2+y 2)×(y −b i (x −a i )2+(y −b i )2+yx 2+y 2),(19)J 22=−E (∂2ln(p (ˆr |z ))∂y 2)=ΣM i =11σ2i (y −b i (x −a i )2+(y −b i )2+yx 2+y2)2.(20)This can be expressed asJ =U T Q −1U ,(21)where Q is defined after Eqn.(8),and the entries of U in the first and second column are{U }i,1=x ¯r i −a ix 2+y 2(x −a i )2+(y −b i )2 x 2+y 2,(22)and{U }i,2=y ¯r i −b ix 2+y 2(x −a i )2+(y −b i )2 x 2+y 2,(23)with ¯r i =(x −a i )2+(y −b i )2+ x 2+y 2.The CRLB sets the lower bound for the variance of esti-mation error of TOA algorithms,which can be expressed as [34]E [(ˆx −x )2+(ˆy −y )2]≥ J −1 1,1+J −1 2,2=CRLB T OA ,(24)where ˆx and ˆy are the estimated values of x and y ,respec-tively,and J −1 i,j is the (i,j )th element of the inverse matrix of J in (21).For the TDOA estimation,its CRLB has been derived in [16].The difference of signal travel time between several receivers are considered:(x −a i )2+(y −b i )2−(x −a 1)2+(y −b 1)2=r i −r 1=l i ,2≤i ≤M.(25)Let l =[l 2,l 3,...,l M ]T ,and t be the observa-tions/measurements of l ,then,the conditional probability density function of t is p (t |z )=1(2π)(M −1)/2|Z |12×exp(−12(t −l )T Z −1(t −l )),where Z is the correlation matrix of t ,Z =E (tt T ).Then,the FIM is expressed as [16]ˇJ=ˇU T Z −1ˇU (26)where ˇUis a M −1×2matrix defined as ˇU i,1=x −a i (x −a i )2+(y −b i )2−x −a 1(x −a 1)2+(y −b 1)2,ˇUi,2=y −b i (x −a i )2+(y −b i )2−y −b 1(x −a 1)2+(y −b 1)2.The CRLB sets the lower bound for the variance of esti-mation error of TDOA algorithms,which can be expressed as [34]:E [(ˆx −x )2+(ˆy −y )2]≥ ˇJ −1 1,1+ ˇJ −1 2,2=CRLB T DOA .(27)Note that the correlation matrix Q for TOA is different from the correlation matrix Z for TDOA.Assume the variance of TOA measurement at i th (1≤i ≤M )receiver is σ2i ,it follows that:Q (i,j )=σ2i i =j,0i =j.and Z (i,j )= σ21+σ2i +1i =j,σ21i =j.As an example,we consider a scenario wherethere is a transmitter at [0,0],and four receivers at [−6,2],[6.2,1.4],[1.5,4],[2,2.3].The range of the targetlocations is 1≤x ≤10,1≤y ≤10.The ratio of CRLB of TOA over that of TDOA is plotted in Fig.3.Fig.3(a)shows the contour plot while Fig.3(b)shows the color-coded plot.It can be observed that the CRLB of TOA is always —in most cases significantly —lower than that of TDOA.xy(a )xy0.10.20.30.40.50.60.70.80.9Fig.3.CRLB ratio of passive TOA over passive TDOA estimation:(a)contour plot;(b)pcolor plot.V.P ERFORMANCE OF TSEIn this section,we first prove that the TSE can achieve the CRLB of TOA algorithms by showing that the estimation error variance of TSE is the same as the CRLB of TOA algorithms.In addition,we show that,for small TOA error regions,the estimated target location is approximately a Gaussian random variable whose covariance matrix is the inverse of the Fisher Information Matrix (FIM),which in turn is related to the CRLB.Similar to the reasoning in Lemma 1,we can obtain the variance of error in the estimation of Υas follows:cov (ˆΥ)≈(G T Ω−1G )−1.(28)Let ˆx =x +e x ,ˆy=y +e y ,and insert them into Υ,omitting the second order errors,we obtainˆΥ1−x 2=2xe x +O (e 2x )≈2xe x ˆΥ2−y 2=2ye y +O (e 2y)≈2ye y (29)Then,the variance of the final estimate of target location ˆzis cov (ˆz )=E (e x e ye x e y )≈14C −1E ( Υ1−x 2Υ2−y 2Υ1−x 2Υ2−y 2 )C −1=14C −1cov (ˆΥ)C −1,(30)where C = x 00y.Substituting (14),(28),(12)and (8)into (30),we can rewrite cov (ˆz )as cov (ˆz )≈(W T Q −1W )−1(31)where W =B −1¯SD−1GC .Since we are computing an error variance,B (19),¯S(5)and D (14)are calculated using the true (mean)value of x ,y and r i .Using (19)and (1),we can rewrite B =−diag ([d 1,d 2,...,d M ]),whered i=(x−a i)2+(y−b i)2.Then B−1¯SD−1is given by B−1¯SD−1=⎡⎢⎢⎢⎢⎢⎣a1xd1b1yd1−¯r1√x2+y2d1a2xd2b2yd2−¯r2√x2+y2d2.........a Mxd Mb Myd M−¯r M√x2+y2d M⎤⎥⎥⎥⎥⎥⎦.(32)Consequently,we obtain the entries of W as{W}i,1=x¯r i−a ix2+y2(x−a i)2+(y−b i)2x2+y2,(33){W}i,2=y¯r i −b ix2+y2(x−a i)2+(y−b i)2x2+y2.(34)where{W}i,j denotes the entry at the i th row and j th column.From this we can see that W=paring(21)and (31),it followscov(ˆz)≈J−1.(35) Then,E[(ˆx−x)2+(ˆy−y)2]≈J−11,1+J−12,2.Therefore,the variance of the estimation error is the same as the CRLB.In the following,wefirst employ an example to show that[ˆx,ˆy]obtained by TSE are Gaussian distributed with covariance matrix J−1,and then give the explanation for this phenomenon.Let the transmitter be at[0,0],target at[0.699, 4.874]and four receivers at[-1,1],[2,1],[-31.1]and[4 0].The signal travel distance variance at four receivers are [0.1000,0.1300,0.1200,0.0950]×10−4.The two dimensional probability density function(PDF)of[ˆx,ˆy]is shown in Fig.4 (a).To verify the Gaussianity of[ˆx,ˆy],the difference between the PDF of[ˆx,ˆy]and the PDF of Gaussian distribution with mean[¯x,¯y]and covariance J−1is plotted in Fig.4(b).The Gaussianity of[ˆx,ˆy]can be explained as follows.Eqn.(35)means that the covariance of thefinal estimation of target location is the FIM related to CRLB.We could further study the distribution of[e x,e y].The basic idea is that by omitting the second or high order and nonlinear errors,[e x,e y]can be written as linear function of e:1)According to(29),[e x,e y]are approximately lineartransformations ofˆΥ.2)(15)means thatˆΥis approximately a linear transfor-mation ofˆΘ.Here we could omit the nonlinear errors occurred in the estimate/calculation ofΩ.3)According to(11),ˆΘ≈¯θ2+2¯θn+n2,thus,omittingthe second order error,thus,ˆΘis approximately a linear transformation of n.4)(10)and(39)mean that n is approximately a lineartransformation of e.Here we could omit the nonlinear errors accrued in the estimate of S andΨ.Thus,we could approximately write[e x,e y]as a linear trans-formation of e,thus,[e x,e y]can be approximated as Gaussian variables.Fig.4.(a):PDF of[ˆx,ˆy]by TSE(b):difference between the PDF of[ˆx,ˆy] by TSE and PDF of Gaussian distribution with mean[¯x,¯y]and covariance J−1.Fig.5.Simulation results of TSE for thefirst configuration.VI.S IMULATION R ESULTSIn this section,wefirst compare the performance of TSE with that TDOA algorithm proposed in[16]and CRLBs.Then, we show the performance of TSE at high TOA measurement error scenario.For comparison,the performance of a Quasi-Newton iterative method[35]is shown.To verify our theoretical analysis,six different system con-figurations are simulated.The transmitter is at[0,0]for all six configurations,and the receiver locations and error variances are listed in Table I.Figures5,6and7show simulation results comparing the distance to the target(Configuration1vs. Configuration2),the receiver separation(Configuration3vs. Configuration4)and the number of receivers(Configuration5 vs.Configuration6),respectively4.In eachfigure,10000trails are simulated and the estimation variance of TSE estimate is compared with the CRLB of TDOA and TOA based localization schemes.For comparison,the simulation results of error variance of the TDOA method proposed in[16]are also drawn in eachfigure.It can be observed that1)The localization error of TSE can closely approach theCRLB of TOA based positioning algorithms.4During the simulations,only one iteration is used for the calculation of B(19).。
ICAO培训-陆空通话单选

陆空通话/单选塔台:1.Can you accept (exit NO.)for departure?2.Hold shorter of RWY NO.,RWY inspection is on progress, estimate TIME delay.3.Bird strike reported on the RWY. We will send vehicle to check the RWY out ,expect TIMEdelay.4.We are informed by the coustense /police/airport that you need taxi to the bay due to5.passenger`s problem.6.Taxi into the position and hold=line up RWY NO.7.Line up with on delay RWY NO.8.Expect a TIME delay for wake turbulence (caution wake turbulence.)9.Line up and wait for weather ,say your intentions.机载气象雷达观察不准确。
10.The preceding traffic has vacated RWY due to weather say your intention.11.Confirm preceding traffic in sight.(Confirm rolling traffic on RWY in sight.)12.Reduce speed MO. For separation.13.No speed restriction/keep speed up as much as feasible.14.Expedite vacate RWY after landing.15.Plan to turn L/R at NO. exit for traffic minimum time on the RWY.16.Continue approach RWY NO. roll to the end is not available/allowed due to traffic.17.Confirm the light/approach light/sequence flashy light are suitable.18.Dim/turn down 调暗brighten up /turn up 调亮switch off/on 打开/关闭19.The light are on minimum settings.20.Show the light 让机组开灯21.Breaking action good/medium/poor/unreliable TYPE. TIME.22.Wind shear warning light/moderate/serious in vicinity.23.What`s the reason for miss approach?24.Caution a flock of birds reported on final/on departure RWY TIME.Caution large flock of birds direction of RWY TIME.Caution bird concentration exists on RWY/TWY.25.Cross RWY NO. report vacated/leaving.26.Cross RWY NO. after crossed turn L/R join TWY NO.27.Expedite cross RWY NO.28.Can you taxi by yourself /Do you need assistance?29.RWY NO. cleared NDB/VOR localizer approach/clear touch and go.30.Make full stop RWY NO. clear to land.31.Unable to approve due traffic congestion make full stop RWY NO. clear to land.32.Air taxi/hover taxi via ... direct to WHERE.33.Air taxi/hover taxi via ... required/specified route to (location heliport operatingarea/movement area active RWY/inactive RWY)RVSM:1.unable RVSM due to WX climb/descent/maintain......2.unable issue clearance into RVSM airspace climb/descent/maintain.........3.convert altitude with China RVSM flight level chart协调移交:callsign, squawk, transmission limit, time放行:1.We have not plan on the FIPS. Report your destination2.Could you report the four letter of destination?3.Clearance can not be issued due to your flight plan is not submitted to the Report Office. Could you check your flight plan again?4.The report office did not receive your flight plan, check with your company operators.5.Stay with me, report ready. I remain on this frequency, call ready.6.Clearance can not be issued at this time due to system failure. Keep you advised.7.departure/airborne time is not determined due to........you are No.1 in the sequence.8.due to WX in vicinity, departures are temporarily restricted. Delay are not determined.9.the departure flights are required to maintain 3miles separation by approach control ,due to WX. Continue wait l will advise.地面:1.start one engine approved, report push back2.confirm the tow bar is available3.after the traffic behind passing by(cleared) push back and start up approved.RNAV:1.unable RNAV radar vector for arrival2.all stations caution, RNAV terminated due to facility unserviceable.紧急避让:1.turn left/right 30 degrees immediately due traffic2.climb/descent and maintain immediately due traffic3.emergency climb/descent due traffic放油耗油:1,confirm you intend to dump fuel before landing.2.confirm you intend to waste/consume fuel before landing.3.clear to fuel dumping area, turn left/right heading.......vector to fuel dumping area.4.fuel dumping approved advise when dumping complete.进近:Turn left/right, radar vector for ILS approach, runway _ _.After/depart+point heading ___,radar vector for ILS approach, runway_ _.Report established on the glide path.Maintain level until establish on the glide path/ILS, report established.Expect vector across the final for spacing.This vector will take u through the localizer due spacing.This turn may take u through the localizer due spacing.You have crossed the localizer, turn left/right heading ___to return the localizer.Orbit left/right for weather.Clear to point, climb /descend and maintain __.hold as published, expect approach time__.地面管制员指挥航空器跟随某一架航空器滑行Taxi behind follow the track on your left.指挥让路Give way to XXX on your left加快滑行速度Expedite taxi, you’re NO.1Taxi without delay, you’re NO.加快滑行速度,由于起飞时间限制Due to flow control timeDue to departure restriction用于滑行道不熟悉时的用语Are not family withTaxiing straight ahead make the left turn at XXX intersection指挥向某一方向滑行Taxi eastbound发现滑错滑行道,立刻停止Stop taxi, you are taxiing the wrong direction原地等待Hold position原地掉头BacktrackMake a 180 on the ramp飞机做大转弯Make a hard left\right turn飞机所在位置不能自主滑行,地面管制员询问Hold position, confirm your need tug service, advise engine shut down.保持频率Continue taxiing, stay with me.按次序等待Hold in sequence, remain on this frequency.地面雷达显示有机组开了应答机,为了避免与塔台五遍飞机STCA,指挥稍后开启应答机Squawk standby小心滑行Caution taxi, work in progress清扫车cleaner 巡视车inspection vehicle地面滑行灯不工作Centerline\side-line taxiway light system un-serviceable航空器与车辆的相关信息Register number、report the positionDo you get its tug number进近的陆空通话1、管制员没有识别航空器,向机组通报Not identified, reset transponder\code and identNo ident observedNot identified, squawk ident2、进近管制员没有识别决定使用程序管制Unable establish radar contact, resume non-radar reporting procedure 3、进近管制员使用转弯识别For identification turn left\right XXX4、两架以上同方向的航班标牌重叠,管制员用调速航向等来识别。
CONTACT ADDRESS
Usability Analysis of Visual Programming Environments: a ‘cognitive dimensions’ frameworkT. R. G. GreenMRC Applied Psychology Unit15 Chaucer Road, Cambridge CB2 2EF, UKM. PetreDept. of Mathematics and Computer ScienceOpen University, Milton Keynes MK7 6AA, UKCONTACT ADDRESS:T. R. G. GreenMRC Applied Psychology Unit15 Chaucer Road, Cambridge CB2 2EFUKInternet: Thomas.Green@tel: +44-1223-355294 (ext. 280)fax: +44-1223-359062To appear in Journal of Visual Languages and Computing1 Introduction - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -12 Psychology and HCI of Programming- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -3Psychology of programming- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -4HCI of programming - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -73 Sketch of a framework of cognitive dimensions- - - - - - - - - - - - - - - - - - - - - - - - - - - -84 Design alternatives in VPLs - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -10Basic - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -11LabVIEW- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -11Prograph - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -13 5 Applying the Cognitive Dimensions - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -14Abstraction Gradient - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -14Closeness of Mapping - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -16Consistency - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -18Diffuseness/Terseness - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -18Error-proneness - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -19Hard Mental Operations- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -20Hidden Dependencies - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -24Premature Commitment- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -26Progressive Evaluation- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -28Role-expressiveness - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -28Secondary Notation and Escape from Formalism - - - - - - - - - - - - - - - - - - -29Viscosity: resistance to local change - - - - - - - - - - - - - - - - - - - - - - - - - - - - -32Visibility and Juxtaposability - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -33 6 Discussion and Conclusions- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -35What the cognitive dimensions framework can tell the designer - - - - - - - -35Future progress in cognitive dimensions- - - - - - - - - - - - - - - - - - - - - - - - - -36Future progress in VPL design - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -37 Acknowledgements - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 38 References - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 44 Appendix A Viscosity Test - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 51Usability Analysis of Visual Programming Environments:a ‘cognitive dimensions’ frameworkT. R. G. Green and M. PetreAbstract:The cognitive dimensions framework is a broad-brush evaluation technique for interactivedevices and for non-interactive notations. It sets out a small vocabulary of terms designed tocapture the cognitively-relevant aspects of structure, and shows how they can be traded offagainst each other. The purpose of this paper is to propose the framework as an evaluationtechnique for visual programming environments. We apply it to two commercially-availabledataflow languages (with further examples from other systems) and conclude that it is effec-tive and insightful; other HCI-based evaluation techniques focus on different aspects andwould make good complements. Insofar as the examples we used are representative, currentVPLs are successful in achieving a good ‘closeness of match’, but designers need to considerthe ‘viscosity’ (resistance to local change) and the ‘secondary notation’ (possibility of convey-ing extra meaning by choice of layout, colour, etc.).1. IntroductionThe evaluation of full-scale programming environments presents something of a challenge to existing HCI. Many, indeed most, of the evaluative techniques that have been proposed in HCI are designed to concen-trate on physical, low-level details of interaction between a user and a device. From GOMS [10] onwards, there has been a tradition of close inspection of ‘simple tasks’, such as deleting a word in a text editor, and of trying to predict time taken to learn or to perform the task. But that tradition is not suitable for evaluating programming environments. If we tried to evaluate a programming environment that way we would be overwhelmed by a mass of detailed time predictions of every simple task that could be performed in that environment. Even if we had the timings, and could digest them, they would only address a few of the questions that designers ask. And finally, GOMS and similar HCI approaches have not so far been applied to notational issues, such as whether to use identifier declarations in a programming language; the HCI approach has concentrated on interactive situations, rather than to notational design.Green [28], [30] presented an alternative approach, called ‘cognitive dimensions of notations’, as a frame-work for a broad-brush assessment of almost any kind of cognitive artifact. Unlike many other approaches, the cognitive dimensions framework is task-specific, concentrating on the processes and activities rather than the finished product. This broad-brush framework supplements the detailed and highly specific anal-yses typical of contemporary cognitive models in HCI and it has more to say to users who are not HCI specialists.The Cognitive Dimensions framework: ‘Cognitive dimensions’ constitute a small set of terms describing the structure of the artifact, which are mutually orthogonal (in principle) and which are derived by seeking generalised statements of how that structure determines the pattern of user activity. Any cog-nitive artifact can be described in their terms, and although that description will be at a very high level it will predict some major aspects of user activity.The dimensions are not guidelines, which are handfuls of unrelated precepts for design; they are neither descriptions of devices nor descriptions of how to use devices; and they are definitely not a cognitive model of the user, although they rest on a common-sense ‘proto-theory’ of what users do. They are discussion tools, descriptions of the artifact-user relationship, intended to raise the level of discourse.Briefly, these are the claims we make for the cognitive dimensions framework:1.Broad-brush analysis is usable by non-specialists in HCI because it avoids ‘death by detail’: it offers afew striking points covering a couple of pages, rather than pages of analysis. It is extremely quick and cheap: an afternoon of careful thought about a system is probably all that is needed.2.Because this assessment is structural, it can be used at an early stage in design. (By the same token itneeds to be supplemented at a later stage by other methods.)3.We claim that the terms it uses conform to many notions which are recognisable but unnamed in thediscourse of non-HCI specialists. Readers should not expect to discover many new ideas, but they should recognise many that were previously unformulated.4.By introducing a defined vocabulary for such ideas, the framework not only makes it easier to con-verse about cognitive artifacts without having to explain all the concepts, but also provides a checklist.Designers and evaluators will find it easier to avoid gross oversights (e.g. not including a cross-refer-encer as part of a spreadsheet).5.For different types of user activity it is possible to set up a preferred profile across the dimensions.Exploratory design will require one type of profile, tightly-specified safety-critical design will require a different profile.6.With a defined vocabulary in place it becomes much easier to describe how remedies for weaknessescan be provided, and how different dimensions trade off against each other.Explicitly presenting one’s ideas as discussion tools is, we believe, a new approach to HCI, yet doing so is doing nothing more than recognising that discussion among choosers and users carries on interminably, in the corridors of institutes and over the Internet. Our hope is to improve the level of discourse and thereby to influence design in a roundabout way. Many protagonists of HCI have tried the direct route; they have explicitly attempted to develop methods of design. Such is not our aim. Indeed, we feel it would be impertinent to suggest that cognitive psychologists can tell professional designers what to do; we have no pretensions that we can design programming languages. We do not even, in this paper, attempt to lay down a set of evaluative criteria that designs should meet, such as are to be found in books of guidelines.The purpose of the cognitive dimensions framework is to lay out the cognitivist’s view of the design space in a coherent manner, and where possible to exhibit some of the cognitive consequences of making a particular bundle of design choices that position the artifact in the space. It is the designer who has to decide on thespecification and where to locate the artifact in the design space, and to invent a solution. It is the designer, not the cognitivist, who has to weigh cognitive costs and benefits against the requirements of expense, soft-ware engineering, personnel training, organisational design, etc.Structure of paper: In this paper we present the cognitive dimensions as a method of evaluating vis-ual programming languages (VPLs) and their environments. (For simplicity we shall not be pedantic in distinguishing language and environment.) We start by briefly reviewing some of the major findings about the psychology of programming and the HCI of programming; we then present an outline of the cognitive dimensions, and show how the dimensions are based on contemporary theory. We then use the dimen-sions one by one to consider the successes and weaknesses of visual programming environments.We have chosen not to attempt to review the state of the art on VPLs. To illustrate the cognitive dimensions, we shall draw on two commercially-available VPLs, LabVIEW and Prograph. These languages are not state-of-the-art, but they are genuinely usable – complex programs have been successfully and enthusias-tically built in them by end-users who are scientific specialists, not programming specialists. Both languages adopt the dataflow model, using box-and-wire representation, but they illustrate different design decisions with different usability consequences. Brief descriptions are given in Section 4.Since they are commercially available we have been able to benefit from personal experience, from com-ments and help from experts, and from a certain amount of empirical observation. Each cognitive dimension will be related to these two languages. We have also taken examples of specific issues from other VPL designs.2. Psychology and HCI of ProgrammingThe framework of ‘cognitively-relevant dimensions’ is founded (not too tightly, alas) on present-day views on the activity of programming, which we shall review very briefly. ‘Programming’ is a seriously over-loaded term, comprising a host of different activities and situations [61]; perhaps it is fortunate that we have no space to enter into the niceties here. What follows is a very high-level view, restricted to that which is relevant to the cognitive dimensions framework.To start with, we need to consider the users and the situation. If we wish to design a programming envi-ronment, who is it for? What are they doing? What aspects of the activity are affected by the programming environment?First, we shall assume that anyone may be a user; expert or novice, end-user or computer-science profes-sional. We shall ignore the large literature on what experts know that novices do not know, but we shall take into account the extra support that novices need.Second, we shall tend to limit our discussion to situations like exploratory or incremental programming. We shall pay no attention to other design criteria, such as safety-critical design or coding for efficiency; nor to other parts of the software creation process, such as communication and negotiation during require-ments elicitation; nor to the demands of the local situation or organization, even though they are known to affect choice of cognitive strategy [87]. One thing at a time!And thirdly, within those limits we shall try to consider as much of the programming process as is affected by the programming environment. Not just coding, nor just comprehension.We shall distinguish rather loosely between the ‘psychology’ and the ‘HCI’ of the programming environ-ment, using ‘psychology’ to refer to the meaning of the code (“How do I solve this problem? What does that code mean?”) and ‘HCI’ to mean interaction with the notational system (control of layout, searching for items).2.1 Psychology of programmingThe maxims of information representation: We start with a truism that may all too easily get overlooked – data is not information. Data must be presented in a usable form before it becomes informa-tion, and the choice of representation affects the usability. But usability is not simply ‘better’ or ‘worse’; how good a representation is depends on what you want to use it for.Diagrams are famously better than text for some problems, worse for others. One school of thought main-tains that the difference lies in the cognitive processes of locating and indexing the components of information, a view well analysed for pulley problems in mechanics by Larkin and Simon [43] who show that the two representations they used, diagrammatic and symbolic, carried the same information but imposed very different processing costs.Mental processing analyses apply just as cogently to differences in programming languages. Green [26], [34] and Vessey [85], [80] have independently developed bodies of research that demonstrate notational structure effects. Their work can be summarised in two maxims.Every notation highlights some kinds of information at the expense of obscuring other kinds. Not everything can be highlighted at once. If a language highlights dataflow than it may well obscure the control flow; if a lan-guage highlights the conditions under which actions are to be taken, as in a rule-based language, then it probably obscures the sequential ordering of actions. Corollary: part of the notation design problem is to make the obscured information more visible.When seeking information, there must be a cognitive fit between the mental representations and the external repre-sentation. If your mental representation is in control flow form, you will find a dataflow language hard to use; if you think iteratively, recursion will be hard.Taken together these maxims mean that a programming system (including the language and the program-mer) will not be successful unless the language fits the tasks the programmer needs to do, and the programmer’s mental representation fit the language representations.Mental representations: The mental representation of a program is at a higher level than pure code. This has been demonstrated in various ways. Soloway and Ehrlich [81] introduced the notion of a schema or ‘programming plan’, binding together several semantically-related but dispersed statements in a Pascal-like program to make a group which taken together achieved a goal, such as ‘form a running total’. Détienne [19] reviews this literature, Rist [68], [69] extends and tightens the schema concept and relates it to a full theory of program development and comprehension in novices and experts. In Prolog, the corre-sponding notion seems to be a ‘technique’ [6], which has a similar function but is more abstract.The dislocation and dispersal of related statements has been seen by some as a major problem in learning to program. Spohrer and Soloway [82] report that, contrary to the received wisdom which says that most novice bugs are caused by misconceptions about language constructs, “many bugs arise as a result of plan composition problems — difficulties in putting the ‘pieces’ of a program together”. Even though the novice knows what bits are required, linking the bits together is too difficult. Further analysis of a familiar and distressing problem, ‘Why can’t smart students solve simple programming problems?’ [78] has brought home the importance of plan composition as a cause of failure to program.Dataflow languages have not received the same degree of attention, although recently it has been shown that the schema analysis can be applied to spreadsheets [75] and visual dataflow languages [31].Concentration on ‘programming plans’ may have led some researchers to downplay other types of knowl-edge. Gilmore [23] shows that possessing strategies for planning and debugging is a prerequisite for programming success. The development of visual programming may well give more scope for visual or spatial reasoning than the older, text-based languages. Saariluoma and Sajaniemi [72], [73], [74] ingen-iously showed that spreadsheet programmers reasoned about formulae in terms of the areas on the spreadsheet, while Green and Navarro [31] showed that mental representations of programs had different structures for Basic, for spreadsheets, and for LabVIEW. Far more research is needed in this area but the message seems to be that where possible, spatial reasoning is used as a support.Order of program development: The development of a program is not linear. Programmers nei-ther write down a program in text order from start to finish, nor work top-down from the highest mental construct to the smallest. They sometimes jump from a high level to a low level or vice versa, and they fre-quently revise what they have written so far [4], [14], [16], [34], [86]. For the purposes of programming support, that is all we need to know. Although the causes and nature of deviations from top-down devel-opment have inspired much research, the implication for a programming environment is quitestraightforward; the order of working should be left to the programmer, not prescribed by the environment.Effect of environment: Green et al. [34] showed that at the coding stage, programmers using text-based languages develop their code in little spurts (possibly corresponding to mental chunks or schemas) which are knitted in to what has been written so far. It follows that programmers need to read and under-stand what has been written so far, in order to knit the new material in. They called this the ‘parsing-gnisrap’ cycle (gnisrap = parsing backwards). Davies [17] extended this to consider the relationship with the environment: an editor which allows easy access to a large window of code makes the cycle easier. Once again, there is further work to be done here (see Ormerod and Ball, [56], for recent developments), but there is a straightforward implication, that the ‘window of access’ needs to be large enough.From problem to program: Brooks [7] described program design in terms of mappings between problem domain and program domain. Subsequent research (e.g. [58], [60]) has strongly reinforced that view. (The spatial reasoning mentioned above can be seen as using an intermediate mapping where possi-ble.) There is a powerful corollary: it is not easy to deal with entities in the program domain that do not have corresponding entities in the problem domain. Lewis and Olson [45] show that for potential end user programmers, an abundance of low-level primitives is one of the great cognitive barriers to programming. Nardi [51] persuasively argues the case for task-specific languages, since by definition they have a high proportion of entities that map very directly back to problem domain. Visual programming languages are not the only possible way to create task-specific programming languages, but they can be very effective.Anderson et al. [1] distinguish between ‘inherent goals’, which exist in the problem domain, and ‘planning goals’, which exist solely in the solution domain. Computing gross profit for the year would be an inherent goal; declaring an identifier called Profit would be a planning goal. T he crux of the problem in designing a programming language for end-users, according to Lewis and Olson [45], is to avoid spawning shoals of planning goals. The problem with an abundance of low-level primitives, in their view, is precisely that weaving them together correctly creates many planning goals. The problem of plan composition, men-tioned above, can be seen as a problem of spawning planning goals.Understanding and evaluating the program: The ‘parsing-gnisrap’ cycle shows that program-mers need to read and evaluate incomplete programs as well as finished ones. The less experienced the programmer, the smaller the amount that is produced before it must be evaluated. Novices need ‘progres-sive evaluation’ [1], an environment where it is easy to check a program fragment before adding to it. Ideally, every step could be checked individually, and combinations of steps could be checked to see whether something had gone adrift. So the environment needs to allow seriously incomplete program frag-ments to be evaluated; a far cry from early systems for, say, Pascal, where a program had to pass a rigorous syntactic check before it could be executed.Experts need to check and debug their programs, too, and – hardly surprisingly – one of the means they use to locate a recalcitrant bug in a big program is to cut the program into smaller fragments. Weiser [89]identified ‘slicing’ as an expert debugging strategy, a slice being the smallest fragment of code that could be run as a program and that reproduced the errant behaviour. Textual languages support slicing by com-menting out unwanted code.By the maxims of information presentation, the understandability of a programming language depends on the match between the way it is structured and the type of question to be answered. For example, a tradi-tional GOTO-language highlights the procedural information (the order of execution of statements) at the expense of the declarative information (how many types of input are distinguished and how each type is handled). Therefore, it is easier to answer procedural questions from a GOTO language than to answer declarative questions. This has been demonstrated for textual languages [26] and its analogue has been demonstrated for visual data flow languages [34], [49].One way to improve the ‘cognitive fit’ is to include cues to improve the accessibility of information. So tex-tual languages may include perceptual cues, such as indenting or choice of typeface, or symbolic cues [26]. Alternatively, the environment may offer comprehension aids, such as software visualization tools [20], which present their information in a structure that highlights what the programmer wants to know. These tools are usually designed purely by intuition, but one day it may be possible to design them as deliber-ately-engineered complements to the programming language they support.2.2 HCI of programmingThe previous section dealt primarily with moving between the problem domain and the program domain; in this short section we need to consider what is involved in interacting with the code, on the screen or on paper.Control of layout and text: Despite an overwhelming literature on the design of text-editors and word-processors very little is known about their use for programming. ‘Engineering estimates’ of time required for simple editing tasks using conventional editors are available [55], and it would be surprising indeed if they failed to apply to programming, but little is presently known about the use of specialised editors, program synthesizers, and the like.Still less is known about code management in visual languages, not even in the common box-and-line structure. A ‘straw’ comparison (i.e. N=1) by the authors is mentioned below (see Section 5.12 on Viscos-ity), but serious research is needed to tell us how programmers plan and manage the updating of diagrammatic notations.Searching and browsing: There is similarly very little known about searching and browsing in vis-ual programming languages – indeed, not much is known about browsing in any kind of language. But it is well-established that programmers need wide access to many parts of the program. Far from reading theprogram line by line, they visit different parts to make comparisons, establish dependencies, and so on [42], [70].Sometimes programmers use existing code as a seed for new code. This is a deliberately-supported feature of object-oriented languages, where programmers frequently specialise an existing class for new purpose, and it is also used by learners making use of example programs to guide them to solutions [52].Different types of browsers (such as scrolling through a long text versus hypertext methods) favour differ-ent strategies and impose different costs [50], but few general principles are yet forthcoming. Whatever type of browser is used, however, it will impose its own cognitive overheads, both in finding the way and in finding the way back. Hypertext systems create long trails of windows which can be so confusing that some systems give explicit support in keeping track of trails [77].3. Sketch of a framework of cognitive dimensionsThe framework of cognitive dimensions consists of a small number of terms which have been chosen to be easy for non-specialists to comprehend, while yet capturing a significant amount of the psychology and HCI of programming. Moreover, it is supposed to apply beyond programming, to a wide variety of other notations and to interactive devices as well, although we shall not discuss other applications in this paper. Finally, the ‘dimensions’, so-called, are meant to be coherent with each other, like physical dimensions.There is a place for both scientific knowledge and craft knowledge in inventing such a framework. The sci-entific knowledge, in the form of the psychological and HCI-based literature just reviewed, tells us that certain empirical effects have been observed, but we have to rely on craft knowledge to tell us whether those effects are important in context, and whether there are significant effects that have been missed. So the craft knowledge sometimes acts as a check on the scientific knowledge, strengthening or discounting its conclusions. The opposite is just as true; the craft knowledge tells us what experts think they do, but controlled observation gives us a different viewpoint and separates out some of the myths1.The framework can be tested by comparing it post-hoc with its roots, to show that each ‘dimension’ taken in turn does have empirical support; and it can be tested by trying it out, seeing whether all known phe-nomena, or at least the important ones, have a place in the framework; and it can be tested by seeing whether experienced programmers, designers or end-users respond to each ‘dimension’ with recognition and understanding, perhaps with some phrase like “Yes, I know about that, I just didn’t have a name for it until now”; and it can be tested by showing that the ‘dimensions’ have internal coherency and dynamics, perhaps one day even by formulating a ‘theory of information artifacts’. And finally, the ultimate test isshow that the different narratives of software design, as seen by different stake-holders, each have their own contributions to make [18].。
沉浸式体验娱乐十大品牌简介

产品与服务
• Virtuix Omni是一款基于虚拟现实技术的游戏设备,它通过 将玩家身体运动引入游戏中,让玩家能够更加深入地参与游 戏。该设备具有高度自由度和真实感,可以让玩家在游戏中 感受到前所未有的沉浸式体验。此外,Virtuix Omni还提供 了一系列丰富的游戏资源,包括各种类型的游戏、虚拟场景 和角色等,以满足不同玩家的需求。
09
品牌九:Perception Neuron
公司简介
总部地点:美国加利福尼亚州洛杉矶市 行业领域:沉浸式体验娱乐
成立时间:2014年 公司类型:外商独资
产品与服务
全身动作捕捉系统
Perception Neuron的全身 动作捕捉系统可以精确地捕 捉用户的动作,并将其转化 为数字信号,从而实现更为
真实的沉浸式体验。
三维环境交互
该公司的技术可以实现在三 维环境中进行交互,使用户 能够更加深入地融入虚拟世
界。
实时数据反馈
Perception Neuron的系统 可以实时反馈用户的运动数 据,以便开发者能够更好地 调整游戏或虚拟现实应用的 体验。
优势与特色
01
高精度捕捉
Perception Neuron的动作捕捉系统 能够实现高精度的身体动作捕捉,使 用户的动作能够以更加自然的方式呈 现在虚拟世界中。
02
广泛的应用领域
该公司的技术不仅适用于游戏领域, 还可以应用于影视制作、教育、医疗 等多个领域。
03
灵活的开发工具
Perception Neuron提供了丰富的开 发工具,方便开发者进行定制和扩展 ,从而满足不同用户的需求。
10
品牌十:Virtuix Omni
公司简介
• Virtuix Omni是由美国Virtuix公司开发的一种沉浸式体验娱乐设备。该公司 成立于2013年,总部位于加利福尼亚州,拥有一支由资深游戏开发者组成的 团队。他们致力于将虚拟现实技术与运动模拟技术相结合,为游戏玩家提供全 新的沉浸式游戏体验。
航行情报服务常用英语词汇

航行情报服务常用英语词汇AAlaska 阿拉斯加Atlantic 大西洋的,大西洋a series of 一系列a special series NOTAM 一种特别系列的航行通告a time-saving method 节省时间的方法abatement 消除,减轻above 在…之上,高出abridge 简略,省略academic 学院的,大学的,学术的accommodation 住所,旅馆房间acknowledge 承认acquire 得到,获得acrobatic 特技表演的acronym 首字母缩略字activation 活动,有活动active 使活动adequate 足够的,充足的adequately 足够地,适当地adjacent 邻近的,接近的adjacent to 邻近,接近adjust (to) 适用于,调整adjust oneself to 使某人适应于administer 管理,实施administration 局adopt 采用,采纳advisory 咨询的,顾问的aerodrome 机场aerodrome obstruction chart 机场障碍物图aeronautical 航空的aeronautical information 航行情报aeronautical information publication 航行资料汇编aeronautical information service 航行情报服务agency 代理机构,代理air 空气,空中air defence exercise 防空演习air defense 防空air force 空军air navigation meeting 航行会议air route 航线air space 空域air-to air missile 空对空导弹air/ground communication 陆/空通讯aircraft identification 航空器识别标志aircraft transiting Pakistan 飞越巴基斯坦的飞机airport 航站,机场airprox 危险接近airway 航路air worthiness 适航性,飞行性能alerting service 告警服务allow 允许aloft 空中的,在高处的alphabetical 按字母顺序的alter 变更,改变,修改alternate 备降,备份的alternate aerodrome 备降机场alternate route 备份航路altitude 高度ambulance 救护车amend 修订,修正,改正amount to 总共达,相当于,合计annex 附件antenna 天线anticipate 预先考虑,预料,预先appendix [复数appendixes 或appendices] 附录,附属物,附加applicable 适用的,合适的appreciate 感谢,赞赏approach 进近approach chart 进近图approach control 进近管制appropriate areodrome or airport 适当的机场apron 停机坪arbitrary 任意的,适宜的arise 出现around 在…周围围绕arrival 到达arrive 到达to arrive at an aerodrome or airport 到达某机场arrow 箭头,as soon as possible 尽快as well as 和,又,也asphalt 柏油,沥青assimilate 吸取,接受asterisk 星号(标注)at interval of 每隔…(时间或距离) ATC instruction 空中交通管制的指令At least 7 days advance notice 至少七天以前预先通知at short notice 临时通知attempt 尝试,试图,设法authorize 审定,认可,授权autonomous 自治的,自备的available 可用的avaiation 航空avoid 避开,避免azimuth 方位角,方位BBay 停机位置be conversant with 精通…,熟悉…beacon 灯标bearing 方位before 在…之前,在…前面below 在…以下,在…下面beyond 在…以外,超出bilateral 双向的,双向作用的bird concentration 鸟群集结blowing snow 吹雪bluff 悬崖,峭壁border 边界boundary 边境,分界线braking action 刹车作用breakdown 破损,击穿,分类,分编briefing 讲解bulletin 公报,通报by means of 用,依靠CCanada 加拿大Caribbean 加勒比海Christmas 圣诞节cable 电缆cable trouble 电缆故障calculate 预测,计算,打算calendar 年历call 呼叫call sign 呼号captive 系留的,拴着的captive balloon 系留气球captographic 制图的,制图学的captographic drafting 制图作业category 类别center(or centre) 中心center line 中心线,中线centerline lights 中线灯certificate 执照,证书channel 波道,渠道chart 航图check 检查,校验cheek list 检查单chemicals 化学制剂church 教堂circuit pattem 起落航线circular 通报circumstance 情况,情形civil 民用civil aerodrome or airport 民用机场Civil Aviation Administration 民用航空局classification 等级.分类clear 晴,清除clear the snow 扫雪clearance 放行,允许,许可,扫除clearway 净空道clerical 办事员的,做办公室工作的climb 爬升close 关闭coefficient 系数coincident 符合的,一致的collate 整理装订,校对,核对,校勘collect 收集collision 碰撞,冲撞combine 连合,结合commercial 商业的,商务的communication failure 通信失效compacted snow 压实的雪compatible 适合的,相合的complete 完成to complete a construction work 完成建筑工程to complete a form 填写表格comply with 遵守,按照…做component 组成部分,成分compulsory 强制的,强迫的compulsory reporting point 强制报告点concentration 集中,集结concise 简短的,简明的,简单扼要的concrete 混凝土condition 条件confluence (河流)汇合处,回流点,汇合consecutive 连续不断的,接连的constant 常数,固定,不变的,不停的接连不断的,持续的construction 建筑,施工construction work in progress 施工工程正在进行contamination 污染continue 继续contour legend 等高线图例contract 缔约,条约contracting State 缔约国control 管制controller 管制员convention 公约,协定converge 汇集,集中于conversion 换算,变换,转化convoyor (行李)传送带,运送器,运输器cooperation 合作coordinate 坐标coordination 协作,协作corp 队,军course 航向cover 包括,含盖,(新闻)报道covered with 被…覆盖criteria[ criterion的复数] 标准,规定,尺度critical snowbanks 临界雪堆cross-hatch pattern (十字)交叉阴影线cumulonimbus 积雨云Ddamp 潮湿danger 危险danger area 危险区dash 冲刺,冲撞,破折号dashed line 虚线dawn 黎明deep 深defence 防卫define 规定,给…下定义,限定definition 定义,解说degree 度delegate the authority to 授权于(某人,机构)denote 表示,意昧depart 离开departure 离开,离港depth 深度depict 画,描绘,叙述derrick 大吊车descend 下降descendant 转变而来,传下来descent 下降description 叙述,描述desert 沙漠destination 目的地diagram 图表dimension 尺寸,面积(复数) dingey 小船diplomat 外交官diplomatic 外交的diplomatic channel 外交途径diplomacy 外交disciplinary 纪律的,训练的,学科的discontinuance 停止,中断,中止dispatcher 调度员,签派员displacedtkeshold 位移的着陆人口disregard 不理睬dissemination 分发,散发distance 距离distress 遇难,失事,事故,遇险distribute 分发,发送给division (行政级别的)处domestic 国内的domestic air route 国内航线domestic route 国内航线dot 小点,点dotted line 点线,虚线downdraft 下降气流draft 草图,草稿drifting 飘动的drifting snow 低吹雪drive 驾驶,驱动to drive a pile 打桩,打夯dry 干燥的,干的dry snow 干雪due to maintenance 由于维修duplex 双工的,双工dusk 黄昏Eexercise caution while taxiing 滑行时小心earth runway 土跑道edge 边缘effect 生效efficiency 效力,效率elevation 标高,海拔高度elliptical 椭园的,有省略之处的embarkation 乘机,搭载emergency 紧急emphasize 强调,着重engine 发动机engine failure 发动机失效engineer 工程师enroute surveillance radar 航路监视雷达enumerate 计数,计算epidemic 传染病,流行性的equipment 设备erect 竖起erection 设立,安装escort 护航,护送establish 建立,设立establish a danger area 设立一个危险区estimate 估计estimated time of arrival 预计到达时间estimated time of departure 预计离港时间even 双数even number 偶数exceptional 特殊的,例外的excess 超过,过分,多于exchange 交换exchange AIP with 同…交换AlPexecution 执行,实施exemption 免除tax exemption 免税expect 期待extension hydmulic‘crash jacks’伸展液压千斤顶FForming Navaid (导航设备布局)布置导航设备facilitate 使容易,使便利failure 失效fee 费用feet 英尺final approach 最后进近fire 火fire fighting equipment 消防设备first 第一,首先flight 飞行,班机flight check 飞行校验flight deck 驾驶舱flight engineer 飞行机械师flight level 飞行高度层flight number 航班号fluorescent 萤光的fly 飞行,飞fly along a route 沿航线飞行to fly off route is prohibited 禁止飞离航线fold 合并,重叠,重台,折叠对折foot 英尺force 力量,效力to force…to land 迫使…降落forced landing 追降fork lifts 叉式升降车,叉车format 形式,格式fraction (数)分数,碎片freestanding 能自立的瑚立式的frequency 频率friction 摩擦friction coefficient 摩擦系数frost 霜frozen 冻冰的frozen snow 冻雪furnish 供给,布置Ggap 裂缝,裂纹garble 歪曲,电文变宇garble message 电报文字general 总则General Administration of Civil Aviation ofChina 中国民用航空总局general aviation 通用航空geographic coordinates 地理坐标geographical 地理ghost 幻影,反常回波glide 下滑glide path 滑道glide slope 下滑坡度glossary 术语汇编,术语gradient 递减,梯度grant 许可,承认graticule 十字分划线,标线,方格图gravel 砂砾,砾石grid 网格坐标,直角坐标系groove 槽,刻槽to groove a runway 跑道上刻槽gross 总的,未打折的;毛重,总重gross weight 毛重ground 地面ground check 地面校验Hhail 雹,冰雹have a bearing on 对…有关系.有联系heading 航向heavy snow 大雪height 高helicopter 直升机high 高hijack 劫持to hijack an airplane 劫持飞机Iice 冰icing 结冰identical 同样的,相同的identification 识别,识别标志if possible 如可能illustration 说明,图解immediate 立即immigration 移民,移居入境implement 执行,实行in VMC condition 在目视气象条件下in addition 另外,此外in close proximity to 与,靠得很近in force 有效in lieu of 代,代替in support of 支持,支援in the course of 在…的过程中,在…期间in the interest of 为了,为了…的利益inadequacy 协调,不适应,不充足index 索引inertial 惯性inertial navigation system 惯性导航系统initiative 起始的,初步的,主动的inoculation 注射预防针inset 插图install 安装instead of 代替instruction 指示,指挥instrurment 仪表instrument approach 仪表进近instrument flight rules 仪表飞行规则intensity 强度interception 拦截,截击international 国际的international air mute 国际航线international airport 国际机场international flight 国际航班interval 间歇,间隔inventory 存货清单,财产目录irregularity 不正常,反常is of a temporary nature 临时的isobaric 等压(线)的isogonal 等角的,等角线的issue 发行,发布italic 斜体的(字)JJeppesen 杰普逊jacket 短上衣jettison 空中放油,投弃jungle 丛林jurisdiction 管辖权Kkilometre 千米knot 海里/小时,节Lload Classification Number(LCN) 载荷等级编号label 标记,符号,标杆land 着陆land at an aerodrome 在机场着陆landing 着陆lateral 横向的,侧向的lateral distance 横向距离lateral limit 横向限制laterally 在侧面地,横向地latitude 纬度lay out 布局,安排legend 图例(图上符号说明) let down 减少,下降level 层,高度层liaison 联系,联络licence 许可证,执照lift truck 升降车light snow 小雪lighting 灯光limit 限制linear 直线的,长度的,沿线的load 载荷localizer 航向信标locator 示位信标log (航行)记录,航空日记logical 符合逻辑的,有条理的long 长loag-range radar 远程雷达longitude 经度longitudinal profile 纵剖面图loose snow 松散的雪low 低lower 降低,较低的lower limit 下限MMediterranean 地中海Magnetic 磁的magnetic bearing 磁方位magnetic variation isogonic lines 等磁差线maintain 维护,维修,保持maintain present altitude 保持现有高度maintain an engine 维修发动机maintenance 维修,维护manuscript 手稿,原稿,加工图margin 边缘,边界,边线,空白边maritime 海岸的,海运的,港口的,海上的,海事的Marker 指点标maximum 最大的maximum all-up weight 最大起飞全重maximum authorized altitude 最大允许高度maximum speed 最大速度maximum take-off weight 最大起飞重量MAYDAY 国际无线电话呼叫的遇险信号Mean 平均mean depth of snow 雪的平均深度mean pressure in hectopascals(bpa) 每百帕斯卡平均气压mean sea level 平均海平面means 手段,方法measure 测量medium 中度,中等medium braking action 刹车作用中度medium range aircraft 中程飞机mercury 水银,水银柱message 消息,电报meteorological 气象的meteorological conditions 气象条件meteorology 气象学metre 米metric 米制的,公制的metropolitan 都市的,首府的middle locator 中示位信标middie marker 中指点标migration 移动,迁移mile 英里mileage 英里程mileage and bearing 航段距离和方位mileage break 里程分段点,转弯点military 军用的,军事military areodrome or airport 军用机场minimum 最小的,最低的minimum descent altitude 最低下降高度minimum enroute altitude(height) 最低航路高度(高)minute 分miscellaneous 其它的(不同性质和特点的),杂项的missile 导弹missile launching 导弹发射monitor 监视,检查,监听员,监控,(教室内的)班长Morse 莫尔斯mud 稀泥,泥桨mud flat 泥滩municipality 市,市政府nautical 海上的,航海的nautical mile 海里nav-signal coverage 导航设备讯号作用区navigation 导航necessitate (使被)需要,必要new 新的new edition 新版本no longer in force 失效noise abatement procedure 消音程序non-compulsory reporting point 非强制报告点non-participaing aircraft 不参加(演习)的航空器non-scheduled flight 非班机飞行non-scheduled flight in transit acrossPakistan 飞越巴基斯坦的非航班飞行non-standard phraseology 非标准用语nonprecision instrument runway 非精密进近跑道not to scale 不按比例notice 通知notify 通知,通告number 编号Oon-request Reporting Point 按要求报告点object 目的observation 观察,观测observe 观察,观测obstacle 障碍物obstacle clearance limit 超障限制obstruction 障碍物occurrence 出现,发现oceanic 大洋的odd 单数odd number 奇数omit 省略,略去operation 航行,营运,工作operational 可使用的,工作的operational requirements 运行的需要operator 操作人员organization 组织orientation 定向,定位origination 来源other than 除了,不同于,非outbreak (瘟疫)突然蔓延,发生outer locator 外示位信标outer marker 外指点标outlet 输出over flight 飞越,上空overfly 飞越,飞过overlap 重迭,交迭overpass bridge 立交桥over run 安全道over shoot 目测高Ppacific 太平洋polar 极地pad 起降地带pair 匹配,配合,配对paragraph 段落parallel 平行的parking 停放participate 参加participating aircraft 参加(演习)的航空器patch 一小块patchy snow (分散的)小块积雪pave 铺筑paved runway 有铺筑面的跑道pavement 道面peak periods 高峰期penetrate 进人,渗人,贯穿percent 百分比permanent 永久性的permission 许可perpendicular 垂直的pertinent 有关的,关于pierce 穿孔,刺穿pile driving in progress 打桩正在进行pilot 驾驶员,飞行员plain language 明语plan 平面,计划plan view 平面图plane 飞机plateau 高原,高地plot 图,标图plotter 向量尺,标图器pneumatic lif dag bag 冷气抬升袋pneumatic 由压缩空气操作的,冷气的poor 差,穷portray 描写,显示possible 可能的practicable 可行的,可实行的precede (时间,顺序的)在前precedence 优先权precision 精密precision approach radar 精密进近雷达preclude 排除,阻止predetermine 预定prefix 前缀,字首preflight briefing 飞行前讲解premeditate 预谋,预先计划prescribe 规定,制定presentation 提供,演出,说明,介绍primary 初级的,一次的primary surveillance radar 一次监视雷达process 处理profile 剖面profile view 剖面图prognostic 预告的,预兆的prognostic chart 天气形势预报圈progress 进步,进行prohibit 禁止prohibited area 禁区promptly 迅速地,果断地promulgation 颁布,公布proximity 接近,最近,近似publish 公布,发布Qquarantine 检疫Rradar 雷达radial 径向的,径向线radio operator 无线电报务员radius 半径rapidity 快,迅速rate 率rate of climb 上升率rate of descent 下降率receipt 收到,收据reciprocal 相互的recognize 承认,认可reef 礁石,暗礁refer to 查阅,参考,涉及reference 参考regardless 不顾的,不关心的regardless of 不管,不顾regards 问候register 注册registration 注册,登记regular 正规的,定期的,正常的regular aerodrome 主降机场regularity 规律性,定期release 释放to release a balloon 释放气球relevant 有关的,相关的reliable 可靠的remote 远距的,远的remote radio communication 远距无线电通信removal 清除,除去,移动,搬走romove 移动,清除to remove the snow on the runway 清除跑道上的雪repeat 重复request 请求,要求requirement 要求requisite 必要的出不可少的rescue 救援,援助rescue vessel 救援船只reserve 保留reserved airspace 保留空域residential area 居民区,居住区respective 各自的,分别的,各个的response 回答,反应restrict 限制restricted area 限制区resume 恢复resume normal operation 恢复正常工作reverse 倒转,反转,反向revise 修订,修正,改变revision 修正rifle range 步枪靶场rime 雾凇rolled snow 滚压的雪rollout 滑跑,冲出跑道rotate (使)旋转route 路线route designator 航线编号route segment 航段runway 跑道runway edge 跑道边缘runway edge light 跑道边灯runway grooving 跑道刻槽runway length 跑道长度ranway profile 跑道剖面runway width 跑道宽度Ssand 沙,铺沙sand spreader 撒沙机satisfy 满足…的条件scale 比例尺,比例,规模schedule 计划表scheduled flight 班机飞行schematic 图解的,简图的,示意图的scheme 方案,计划search and rescue 搜寻与援救second 秒,第二second surveillance radar 二次监视雷达secondary 二次的,备份的secondary power supply 备用电源segment 段(航段)seldom 很小,不常,难得sequence 次序,顺序search 搜寻set out 列在,展示,陈列,出发shadow 影子sheet 表,表格,纸页sidestep 侧步simplex 单工,单工的,单向的slope 坡度slush 雪浆snow 雪It continues snowing 正在继续下雪snow blower 吹雪机snow clearance 扫雪snow clearance in progress 在扫雪snow patches 小块积雪snow plough 扫雪机snow removal 扫雪snowbank 雪堆soar 滑翔,高飞,翱翔飞行solely 唯一地,抛一地solid outline 实周线,实轮廓线sorry 抱歉sorry for error 抱歉,弄错了source 出处,来源,原始资料speak 说话speed 速度speed limit 速度限制spray 喷射squall 暴风,狂风stack 烟囱,飞行等待层stack up 命令分层盘旋飞行等待着陆standard 标准standard phraseology 标准用语standing water 积水statute 法定,规定statute mile 法定英里steel 钢stipulate 规定,限定stop 停止stopway 停止道subject to 易受到,倾向于,必须经过subject to interruption 易受干扰subject to approval 须经批准submit 服从,屈服subscribe 订购subscription 订购subsequent 以后的,随后的sufficient 足够的,充分的suffix 后缀间尾summary 摘要,概略sunrise 日出sunset 日落supersonic 超声的,超音速的supervisory 监督的,管理的supplement 补充,增补,附刊support staff 助理,技术人员surface 表面,地面(或水面) surveillance 监视survival 幸存,幸存者,救生:活命的,保命的symbol 符号,代号systematically 系统地,有规划地Ttabulate 把…制成表,列表tabulation 图表tailor 改编,修整take off 起飞taken for 被认为taxi 滑行taxiway 滑行道teardrop pattern 修正角航线telephone 电话telephone call 电话temporary 临时的temporary obstacle 临时障碍物ten degrees below zero 零下十度terminal 航站,终端区terminal building 机场候机楼terminal surveillance radar 终端区监视雷达terrain 地形,地带tether 系留,系链tethering equipment 系留装置tetrahedron 四面体the flow of information 情报畅通the manoeuvering area 机动区the movement area 活动区thin snow 薄薄的一层雪third 第三threshold 跑道着陆人口through 通过through diplomatic channels 通过外交途径thus 因此,像这样,如下tick 小记号time of observation 观测时间time schedule 时刻表tint 浅色topography 地形学,地形touchdown 接地touchdown zone 接地地带train 训练training 训练training school 培训学校transcribe 抄写,记录,录音播送transit 过境transit area 过境区域transition 过渡transition altitude 过渡高度transition layel 过渡层transition level 过渡高度层transmit 发射transponder 应答机tropical 热带的trouble 故障true 真true North 真北true bearing 真方位Uunavailable 不能使用的,无法提供的,搞不到的underline 下面划线,强调undershoot 目测低undue 不适当的,过份的unidentified 无法识别的,不能识别的unidentified aircraft 不明国籍的航空器unpaved runway 无铺筑面的跑道unreliable 不可靠until further notice 直到另行通知止unusable 不能使用的update 使最新,更新updraft 上升气流upper 上方upper limit 上限usable 可用的Vvariation 磁差,偏差,差别,变化vehicle 车辆,交通工具verbal 口头的,言语的verbally 文字上的,口头的vertical 垂直的vertical limit 垂直限制vessel 船只vicinity of 在…附近violation 违反,违章visual 目视的visual approach 目视进近Wwater patches 小块积水weight 重量wet 湿的wet snow 湿雪wide 宽wide spread 广布的,普遍的,蔓延的withdraw 撤消withdrawal 收回,撤回work in progress 正在施工Zzero 零。
人类基因组概况ppt课件
2.91Gbp
54% 38% 9% 35% 26588 42% Titin(234) 约300万个 1/12500 bp
最长的染色体 最短的染色体 基因最多的染色体 基因最少的染色体 基因密度最大的染色体 基因密度最小的染色体 重复序列含量最高的染色体
It is essentially immoral not to get it (the human genome sequence) done as fast as possible.
James Watson
人类基因组计划的完成,使得我们今天有可能来探 讨基因组的概,但我们仍然无法来谈论细节。
重复序列含量最低的染色体
编码外显子序列的比例 基因的平均长度
2(240 Mbp) Y(19 Mbp) 1(2453) Y(104) 19(23/Mb) 13,Y(5/Mb) 19(57%)
2,8,10,13,18(36%)
1.1~1.4% 27 Kb
女 平均 男
染色体上距着丝粒越远,重组率越高
4. Francis S. Collins, Eric D. Green, Alan E. Guttmacher, Mark S. Guyer :A Vision for the Future of Genomics Research. A blueprint for the genomic era. Nature Apr 24 2003: 835.
而 Celera 的测序样本来自5个人:分别属于西班牙裔、 亚洲裔、非洲裔、美洲裔和高加索裔(2男3女),是从21个志 愿者样本中挑选的。
英文参考文献按字母顺序排列
英文参考文献按字母顺序排列在学术论文或研究报告中,参考文献是必不可少的一部分。
参考文献可以增强论文的可信度,让读者更好地理解研究背景和关键问题。
在英文参考文献中,按字母顺序排列通常是一种常见的规范。
下面列出一些常见的英文参考文献范例,并按字母顺序排列。
A1. Altman, D. G. (1991). Practical Statistics for Medical Research. CRC Press.B2. Burke, M., & Kraut, R. (2016). The relationship between Facebook use and well-being depends on communication type and tie strength. Journal of Computer-Mediated Communication, 21(4), 265-281.C3. Cohen, J. (1988). Statistical Power Analysis for the Behavioral Sciences. Lawrence Erlbaum Associates.D4. Dweck, C. S. (2006). Mindset: The new psychology of success. Random House.E5. Ekström, M. (2017). Teaching and learning in the digital age: Online and offline pedagogies. Routledge.F6. Freud, S. (1900). The Interpretation of Dreams. The Hogarth Press.G7. Goleman, D. (1995). Emotional Intelligence. Bantam Books.H8. Hargittai, E. (2015). Is bigger always better? Potential biases of big data derived from social media. Annals of the American Academy of Political and Social Science, 659(1), 63-76.I9. Ivanova, A., & Zhang, L. (2016). Work-family conflict in the new era of Chinese industrialization: A study of gender, social class, and subjective work-family conflict. Journal of Family Issues, 37(2), 238-261.J10. Johnson, S. (2006). The Ghost Map: The Story of London's Most Terrifying Epidemic--and How It Changed Science, Cities, and the Modern World. Riverhead Books.K11. Kim, K. (2018). The influence of social media usage on civic engagement: A comparison of young adults in the United States and South Korea. Information, Communication & Society, 21(10), 1439-1455.L12. Luthans, F., & Youssef-Morgan, C. M. (2017). Psychological Capital and Beyond. Oxford University Press.M13. Marwick, A. E., & Boyd, D. (2010). I tweet honestly, I tweet passionately: Twitter users, context collapse, and the imagined audience. New Media & Society, 13(1), 114-133.N14. Newman, A., Donohue, R., & Eva, N. (2017). Psychological safety: A systematic review of the literature. Human Resource Management Review, 27(3), 521-535.O15. O’Connor, A., & Joffe, H. (2014). Intercoder reliability in qualitative research: debates and practical guidelines. International Journal of Qualitative Methods, 13(1), 1-12.P16. Prensky, M. (2001). Digital natives, digital immigrants. On the Horizon, 9(5), 1-6.QNo entry starting with "Q" is available.R17. Reisler, R. B., & Reisler, E. (2017). Guide to Technology in Psychiatry. CRC Press.S18. Saldaña, J. (2015). The Coding Manual for Qualitative Researchers. Sage Publications.T19. Turkle, S. (2011). Alone Together: Why We Expect More from Technology and Less from Each Other. Basic Books.UNo entry starting with "U" is available.V20. Van Dijk, J. (2012). The Network Society: Social Aspects of New Media. Sage Publications.W21. Weick, K. E., & Sutcliffe, K. M. (2007). Managing the Unexpected: Resilient Performance in an Age of Uncertainty. John Wiley & Sons.XNo entry starting with "X" is available.YNo entry starting with "Y" is available.ZNo entry starting with "Z" is available.这些英文参考文献范例可以让你更好地了解如何按字母顺序排列参考文献。
英语翻译官的职业规划书

Gaining practical experience through internships or part time translation jobs can help new translators apply their skills in real world scenarios and prepare them for future career development
Language Experts
English translators are professional in both the source and target languages, discussing an extended vocabulary and master of grammar rules
Translation Techniques
Master variant translation techniques such as literal, free, and adaptive translations to flexible cat to different translation scenarios and requirements
Professional Knowledge
Specialized Field Research
Conduct in depth research into specialized fields like law, medicine, or technology to grasp the fundamental concepts, terminologies, and operational procedures This helps to accurately convey the intended meaning of source texts
富有责任感的人英语作文
Growing up, Ive always been surrounded by adults who instilled in me the importance of responsibility. Its a trait that Ive come to value deeply, and its something that I strive to embody in my daily life. Responsibility is a cornerstone of character, a quality that shapes our actions and decisions, and ultimately, defines who we are as individuals.One of the earliest lessons in responsibility I learned was from my father, a man who never shirked from his duties. He would often say, A person without responsibility is like a ship without a rudder. His words were not just idle advice they were a reflection of his life. He was a man who took his role as a father, a husband, and a professional seriously. Watching him balance work, family, and community commitments without ever complaining taught me the essence of being responsible.In school, the concept of responsibility was further reinforced. Teachers would often assign group projects, where each member had to contribute equally to ensure the success of the task. It was during these times that I realized the weight of responsibility when it came to teamwork. There were instances when some members would slack off, leaving the rest of us to pick up the slack. It was frustrating, but it also taught me the importance of being reliable and accountable for my part in any collective effort.Responsibility extends beyond personal and academic realms it also plays a crucial role in our social interactions. I recall an incident during a community cleanup event where I was part of a group tasked with collecting trash from a local park. The day was hot, and the task was daunting, but everyone was committed to making a difference. It was astark reminder that being responsible isnt just about fulfilling ones own duties but also about contributing to the welfare of the community.Moreover, the sense of responsibility is not limited to humans its a quality that can be observed in nature as well. Take, for instance, the ant, a tiny creature known for its industriousness. Ants work tirelessly, each one playing its part in the colonys survival. This natural example of responsibility is a testament to the universality of the concept.In todays fastpaced world, where distractions are aplenty, maintaining a sense of responsibility can be challenging. However, its crucial for personal growth and societal progress. Ive found that setting clear goals and being mindful of my actions helps me stay on track. Its about making conscious decisions and owning up to the consequences of those decisions.Taking responsibility also means being open to feedback and learning from mistakes. Its easy to become defensive when criticized, but Ive learned that embracing constructive criticism is an essential part of growth. Its through acknowledging and correcting our errors that we become more responsible and better equipped to handle future challenges.In conclusion, being a responsible individual is about more than just fulfilling obligations. Its about being aware of our impact on others and the world around us. Its about making choices that reflect our values and contribute positively to society. As I continue to grow and learn, I am committed to being a person who takes responsibility seriously, not justfor my own sake, but for the sake of those around me and the world we share.。
黑龙江省齐齐哈尔市九校2023-2024学年高三上学期开学联考英语试题
黑龙江省齐齐哈尔市九校2023-2024学年高三上学期开学联考英语试题学校:___________姓名:___________班级:___________考号:___________一、阅读理解For children, space is magical — a whole world is out there, with so many things to learn and stories to read. Here are some children’s books about space and the solar system.Mae among the Stars by Stasia BurringtonThis beautifully illustrated picture book is attractive to young kids. It was inspired by the first African American woman in space, Mae Jemison. It tells the story of Mae as a little girl, who always knew she had big dreams about space. This is a great addition to a young kid’s collection, as a reminder to hold tight to dreams and never give up.Space by Libby JacksonThis beautifully illustrated book gives kids a look at 50 women from around the world who were involved in exploring space in some way, from the 19th century to the present day. This is a perfect gift for young kids who want to know more about some of the lesser-known scientific achievements related to space exploration.Chasing Space by Leland MelvinThis is Melvin’s story about being a football player-turned-astronaut, along with his recovery from an injury that nearly left him deaf. Kids will love reading his story about how he faced challenges and advanced ahead, and he also includes DIY experiments for kids to try, and a section of full-color photographs.System and Beyond by David A.AguilarThe book is full of beautiful illustrations of space, and is perfect for kids of all ages, exploring various planets and the solar system. Unlike other kids’ space book, this is a National Geographic book written and illustrated by an award-winning astronomer and space artist. Aguilar is also the former Director of Science Information and Public Outreach at the Harvard-Smithsonian Center for Astrophysics.1.What do Mae among the Stars and Space have in common?A.They include less-known astronauts.B.They tell about scientists’ childhood.C.They cover women exploring space.D.They are suitable for children of all ages. 2.Whose book attracts children showing interest in experiments?A.Stasia Burrington’s.B.Libby Jackson’s.C.Leland Melvin’s.D.David A.Aguilar’s.3.What is unique to System and Beyond?A.It has beautiful pictures.B.It tells about space artists.C.It has won many grand awards.D.It was written by an astronomer.The Louvre is the most popular museum in the world. Last year, about 10 million visitors, more than 75% of whom were foreign tourists, came to the museum. About 80% of them were here for Mona Lisa-and most of them left unhappy.According to a survey of British tourists earlier this year, Mona Lisa was voted the world’s most disappointing attraction, beating out Checkpoint Charlie, Spanish Steps, and Urinating Boy in Brussels.If the museum thinks that it is inspiring the next generation of art lovers, it is in fact doing the opposite, thanks to the huge crowds in front of the picture. The overcrowding here was so bad that Jean-Luc Martinez, the museum’s director, has to admit, “We have to take steps to deal with the overcrowding in the coming years: new entrances and timed tickets for the museum.”He misunderstands the problem-for the Louvre, with more gallery space than any museum on the planet, isn’t that crowed. On my last visit, the French painting wing had just a few visitors. Even Venus de Milo, perhaps the second most famous work of art in the museum, only drew a comfortable few dozen visitors. In other words, the Louvre does not have an overcrowding problem. It has a Mona Lisa problem. No other famous painting comes anywhere close to monopolizing (垄断) a museum like she does. It is time for the Louvre to admit its failure. The museum does not need new entrances or timed tickets.Instead, it only needs to set up a moving walkway in front of Mona Lisa and let Samsung or another smartphone company to fix its cutest cameras around her. So visitors can strike a pose on the moving walkway, and download their cutest selfies (自拍像) with Mona Lisa later. I can even picture the moving walkway smoothly guiding tourists past the Mona Lisa into the gift shops, where millions of selfiers can take time to enjoy their pictures, and spend money.It is time to set it up now since the 2024 Summer Olympics is around the comer. 4.Which was the most disappointing attraction according to the survey? ________A.Mona Lisa.B.Venus de Milo.C.Spanish Steps.D.Urinating Boy. 5.What does the author think of Jean-Luc Martinez’s solution? ________ A.Amazing.B.Practical.C.Expensive.D.Unworkable. 6.Why is it so crowded in front of Mona Lisa? ________A.A lot of visitors stay there to appreciate it.B.The room housing the picture is too small.C.Too many visitors want to take a picture with it.D.The ticket for the famous painting is too cheap.7.What is the author’s main purpose in writing the text? ________A.To share his unpleasant visit to the Louvre.B.To introduce a famous painting in a museum.C.To offer a simple solution to the Mona Lisa problem.D.To show the opportunity brought by the 2024 Olympics.People always underestimate (低估) others’ desire for constructive feedback (反馈) and therefore don’t provide it, even when it can improve another person’s performance. according to research published by the American Psychological Association.Previous research suggests people avoid giving feedback because they’re afraid that it will embarrass or upset the other person, or that doing so may harm their relationships. Nicole Abi-Esber of Harvard Business School and her colleagues theorized there might be another reason why people refuse to give feedback: They simply don’t fully recognize the potential of their input to improve others’ outcomes, leading them to underestimate others’ desire for such feedback.To test their theory, the researchers conducted a series of experiments involving 1,984 participants. In one experiment. participants were presented with 10 imaginary awkward social situations at work, where they could either give or receive constructive feedback, In another experiment, participants were asked to recall a situation where they could either have given or received constructive feedback. In the final experiment, participants were paired, with one practising a speech for a competition and the other assigned to listen and provide feedback.Across all the experiments, people in a position to give feedback consistently underestimated potential receivers’ desire for it. The more consequential the feedback was,the more likely participants were to underestimate the other’s need for feedback and the less likely they were to offer it. The gap was smaller in more everyday, less important situations, such as when the other person had food on their face.The researchers were surprised to find that simply asking people to quickly reflect “If you were this person, would you want feedback?” helped participants recognize the value of feedback to the other person and helped close the giver-receiver gap. “Take a second and ask yourself if you would want feedback if you were them. Most likely you would, and this realization can help empower you to give them feedback,” said Abi-Esber.“Feedback is key to personal growth and improvement.” said coauthor Francesca Gino, also of Harvard Business School. “The next time you hear someone mispronounce a word, or see a dirty mark on their shirt, point it out to them — they probably want feedback more than you think.”8.What makes people fail to give feedback according to previous research?A.Their own sense of embarrassment.B.Their fear of unpleasant outcomes.C.Their poor ability to interact with others.D.Their failure to realize others’ needs. 9.What does the underlined word “consequential” in paragraph 4 probably mean?A.Regular.B.Understandable.C.Important.D.Achievable.10.How can people be made more willing to offer constructive feedback?A.Urge them to recall great feelings of helping others.B.Train them to pay attention to much bigger problems.C.Encourage them to ask about the other persons’ desire.D.Get them to imagine they’re in the other persons’ shoes.11.What does Francesca Gino mainly try to do in the last paragraph?A.Present a fact.B.Give warnings.C.Provide advice.D.Make a summary.Tesla’s self-driving cars have recently come under investigation as a report on crashes raises questions about their safety. Despite Tesla CEO Elon Musk’s claim that their Autopilot capability makes their cars “unequivocally (毫不含糊地) safer,” data suggests otherwise.According to The Washington Post, the number of deaths and serious injuries associated with Tesla’s driver-assistance technology is higher than previously reported. The NationalHighway Traffic Safety Administration (NHTSA) recorded 736 crashes since 2019, with at least17 of them being fatal. These figures include crashes involving both Autopilot, which allows cars to drive on highways without human intervention, and the newer Full Self-Driving feature, which extends automation to city streets. However, these statistics can’t record incidents that were avoided due to the cars’ safety features. Additionally, when compared to the total number of car crashes that occurred last year, the number of crashes involving driver-assistance vehicles appears relatively small, but actually it’s not.Tesla’s safety claims lack context as Autopilot is primarily designed for highways, while most accidents occur in more complex environments with cross-traffic, pedestrians, and cyclists. Moreover, Tesla’s customer base consists mainly of wealthier individuals who live in communities with lower accident rates.Concerns are raised by Tesla’s request to the NHTSA not to reveal whether Autopilot or Full Self-Driving was in use during fatal crashes. This lack of transparency (透明) prevents a comprehensive analysis of the incidents and raises questions about responsibility.Safety exaggerations (夸大) combined with Tesla’s aggressive marketing have led to accidents caused by drivers relying too heavily on the system. Full Self-Driving does not allow the car to fully drive itself, and drivers are expected to remain attentive and ready to intervene at all times. However, Tesla’s messaging may mislead some users into believing otherwise.While a driverless future has the potential to be safer, it is crucial not to convince the public that underdeveloped capabilities are ready for widespread use. Tesla should address past problems, ensure their automation set can detect emergency vehicles, and be transparent with the public about the limitations of their technology. Rushing the implementation of such technology without addressing its limitations could lead to serious consequences on the road. 12.What can we learn about Tesla’s driver-assistance-related crashes from paragraph 2?A.736 fatal cases of self-driving are recorded.B.NHTSA focused on the crashes on highways.C.The total number of car crashes is extremely small.D.The incidents avoided are not counted in the crash statistics.13.What can be inferred about Tesla’s safety claims?A.They are supported by comprehensive data.B.They are based on limited driving environment.C.They are restricted to the experiences of satisfied customers.D.They have been proven to be accurate and reliable by NHTSA.14.What can we know about Full Self-Driving?A.It is ill-received.B.It is well-developed.C.It needs the driver to stay focused.D.It reduces the accidents greatly. 15.Which title best summarizes the content of this text?A.Concerns and Questions Surrounding Tesla’s “Self-Driving” CarsB.Tesla’s Self-Driving Cars: The Safest Option of Driving on the RoadC.The Future of Self-Driving Cars: A Closer Look at Tesla’s TechnologyD.Reconstruction and Revolution of Tesla’s Autopilot and Full Self-Driving二、七选五Making the Most of Life ExperiencesIf you ask anyone what the purpose of life is, you’ll likely receive wildly different responses. The answer is deeply personal because different things are important to us throughout the course of our lives. 16 Finding ways to make the most of our experiences is a challenge we face every day. Here are some ways to make your experiences meaningful.Follow your dreams.The number one way to live a life free of regret is to follow your dreams. Enthusiasm will die without actions supporting them. 17 Every day take an action, no matter how small, to achieve your goals. Each day is a step forward and none of it is wasted.Make lots of mistakes.18 Many of my strongest memories come from the times I’ve failed, and those lessons have stayed with me. Failure is beneficial to us. And time allows me to see the value of even the most painful situation.19Difficult and painful experiences shape our character but can also let us feel down. These stop us from moving forward. So much of our progress in life relies on willpower and a healthy state of mind. If you’re under stress, your body and mind both require time to recover.20For me, life is about experiences. We all have to dream, work hard, and fail before we can achieve success. Maybe we’ll discover along the way that the journey is more important than the destination.A.Take care of yourself.B.Improve your personality.C.Making mistakes is the surest path to grow as a person.D.It’s best to rest, recover, and slowly build back up your strength.E.Yet one thing stays with us no matter where we go: our experiences.F.Though we try our best to make fewer mistakes, it is impossible to avoid them.G.Though we can’t choose the result of our actions, we can choose to keep pursuing.三、完形填空One of the most powerful forces of nature is motherly love. It is found not just insound, he found a newborn human baby being warmed by a dog. The baby, who had been24.A.man B.woman C.dog D.bear 25.A.hot B.cold C.clear D.quiet 26.A.abandoned B.protected C.tended D.wrapped 27.A.setbacks B.concerns C.errors D.injuries 28.A.cherish B.risk C.lengthen D.change 29.A.romances B.fantasies C.sacrifices D.memories 30.A.tragic B.funny C.thrilling D.scary 31.A.looked into B.ran into C.burst into D.got into 32.A.distinguishing B.separating C.sheltering D.releasing 33.A.seized B.carried C.killed D.stopped 34.A.inside B.outside C.over D.beyond 35.A.benefits B.boundaries C.results D.secrets四、用单词的适当形式完成短文语法填空Confucianism, developed from thoughts by Confucius during the Spring and Autumn Period, is a philosophical system which has become 36 important part of Chinese culture. It 37 (set)up by Confucius (551-479BC) and later was developed by philosophers, including Mencius, Dong Zhongshu, Wang Yangming and others.Confucianism means a lot not only to China, but also to the world. In 1988, 75 Nobel prize winners said that 38 mankind is to survive (生存), it must go back 25 centuries in time to learn from the 39 (wise) ofConfucius. Today, sentences from Confucianism are 40 (wide) used in speeches or talks given by famous foreign people. Besides, people around the globe can learn about Confucius ideas in Confucius Institutes and Chinese Culture Centers abroad. The institutes and centers serve 41 non-profit institutions(盈利机构) to help foreigners 42 (well) understand China than before through language teaching and culture introduction.So far China 43 (open) 465 Confucius Institutes in 123 countries and regions. There are also 713 Confucius Classrooms operating in middle and primary schools. What’s more, Chinese Culture Centers in Cairo, Paris, Berlin, Tokyo and Denmark, to name a few, are introducing China by holding cultural 44 (activity), opening training classes and45 (build) libraries.五、其他应用文46.假定你是晨光中学高三学生李华。
奥拉帕利治疗肝内胆管细胞癌1例
考 虑 患 者 恶 性 胆 道 梗 阻 ,肝 脏 肿 瘤 已 侵 犯 周 围 组 织 ,伴 淋 巴 结 转 移 ,无 手 术 切 除 指 征 ,5 t 行 控 制 黄 疽 于 5 月 5 曰行 “经 皮 肝 穿 刺 胆 道 支 架 植 人 术 + 外 引 流 术 ”,术 中 可 见 : 肝 门 部 胆 管 梗 阻 ,侵 犯 肝 脏 右 前 及 右 后 分 支 ,其 中 右 后 支 2 支 分 支 起 始
【 Key w ords】 olaparib; cholangiocarcinoma; g e n e mutation
(J [ntervenl Radiol, 2 0 2 1 ,
1 临床资料 患 者 男 ,5 9 岁 。 因 “进 行 性 黄 疸 伴 皮 肤 瘙 痒 丨 个 月 ”人 院 。
既 往 体 健 .,患 Af'j 2 0 1 9 年 3 月 无 明 W . 诱 因 出 现 皮 肤 、巩 膜 黄 染 ,有 尿 色 加 深 ,伴 周 身 瘙 痒 ,右 上 腹 隐 痛 不 适 ,无 畏 寒 发 热 ,无 恶 心 呕 吐 等 2019年 4 月 2 7 日于我院肝胆外科完善上腹部 M R 检 查 示 :肝 左 叶 肝 内 胆 管 、胆 总 管 肝 门 部 截 断 ;肝 左 叶 R 大 占 位 ,考 虑 肝 内 胆 管 细 胞 癌 (丨C C ) 可 能 大 ;肝 _彳, 叶肝内胆管轻
写事英语作文范文

写事英语作文范文When it comes to writing an eventbased English essay its important to focus on the key aspects of the event including the setting the participants the activities involved and the overall impact or significance of the event. Heres a sample essay that illustrates these elementsTitle A Memorable School TripLast month our school organized a trip to the local science museum an event that has left a lasting impression on all of us. The purpose of the trip was not only to provide us with an educational experience but also to foster a sense of camaraderie among the students.The day began early with the school bus picking us up from the school premises. The excitement was palpable as we embarked on our journey. Upon arrival at the museum we were greeted by the museums staff who were eager to share their knowledge with us.The museum was a treasure trove of scientific wonders. We were divided into smaller groups each led by a guide who took us through various exhibits. The first exhibit we visited was the Hall of Dinosaurs where we marveled at the lifesized replicas of these prehistoric creatures. Our guide explained the different species and their habitats which was both fascinating and educational.Next we moved on to the section dedicated to the human body. Here interactive displays allowed us to learn about the various systems and their functions. The highlight was a virtual reality experience that simulated a journey through the human body providing a unique perspective on our own anatomy.The afternoon was dedicated to handson activities. We participated in a workshop where we built our own simple machines applying the principles of physics we had learned in class. The sense of accomplishment we felt when our creations worked was incredibly rewarding.Throughout the day our teachers and the museum staff encouraged us to ask questions and engage in discussions. This interactive approach to learning made the experience more enjoyable and memorable.The trip concluded with a group photo in front of the museum capturing the smiles andexcitement of the day. As we boarded the bus to return to school we were already discussing what we had learned and sharing our favorite moments.This school trip was more than just an outing it was an enriching experience that brought our classroom lessons to life. It not only expanded our knowledge but also strengthened our bonds as a class. The memories of this day will undoubtedly be cherished for years to come.In this essay the writer has effectively described the event by setting the scene detailing the activities and reflecting on the impact of the event. This structure can be applied to various types of eventbased essays ensuring a comprehensive and engaging narrative.。
英语四级快速阅读技巧有哪些
英语四级快速阅读技巧有哪些第一步:浏览Skim ( 0.5分钟 2分钟 )1.分析大标题(Brainstorm the Title)(5 10秒)目的:调动脑细胞,主动预测文章内容。
官方样题Landfills 的分析思路:land + fill = 土地填埋,加了s, 可能指多处填埋场地。
在不认识这个单词的情况下(汉译:垃圾填筑地),能想到这一层就算漂亮。
20__年12月真题Six Secrets of High-Energy People 的分析思路:secrets:多数人不知道,一定新颖有趣;high-energy people 只能是指精力充沛的人,不可能是X战警。
文章要告诉我们,那些人为什么精力充沛,希望我们学习他们的秘诀。
20__年6月真题Highways的分析思路:为什么要修建公路怎么修建公路有哪些功能存在哪些问题一般说明文的写作结构都是如此:计划成形功能问题。
例如:联合国的起因联合国的成立联合国的运作联合国的问题。
2.分析小标题 (Tidy the Subtitles)(20 25秒) 目的:了解文章内容,把握总体结构。
官方样题:Sub 1:How Much Trash Is Generated 一看该段字数少,忽视Sub 2:How Is Trash Disposed of 关键字:处理Sub 3:What Is a Landfill引进主题,字数增加,进入重点。
推理:landfill 肯定是上面提到的一种垃圾处理方法Sub 4:Proposing the LandfillLandfill由新信息变成已知信息。
关键字:Proposing计划、建议Sub 5:Building the Landfill 关键字:Building 修建注意:前一段讲计划,这一段讲修建,联系紧密,可以合并Sub 6:What happens to Trash in a Landfill 关键字:What happens; 字数少,忽视Sub 7:How Is a Landfill Operated 关键字:Operated 如何运作。
空管民航缩略语大全

空管民航缩略语大全空中交通管制缩略语大全(ICAO English) A Amber 琥珀色(南北向主航路)A/A Air-to-air 空对空AAL Above Aerodrome Level 高出机场平面ABM Abeam 正切ABN Aerodrome beacon 机场灯标ABT About 关于ABV Above …以上AC Altocumulus 高积云ACAC Airborne collision avoidance system 机载防撞系统ACC Area control center 区域管制中心ACCID Notification of an aircraft accident 航空器失事通知ACFT Aircraft 航空器ACK Acknowledge 承认,收悉CAN Aircraft classification number 航空器等级序号AD Aerodrome 机场ADA Advisory area 咨询区ADF Automatic direction-finding equipment 自动定向设备ADIZ Air defense identification zone 防空识别区ADR Advisory route 咨询航路ADS Address 收电地址ADVS Advisory service 咨询服务ADZ Advise 通知AEIS Aeronautical en-route information service 航空的航路情报服务AER Approach end runway 跑道的进近端AERADIO Air radio 航空无线电AES Aerodrome emergency services 机场紧急服务AFB Air force base 空军基地AFCS Automatic flight control system 飞行自动控制系统AFIS Aerodrome flight information service 机场飞行情报服务AFL Above field level 高于场面AFM Affirmative 是的,对的AFS Aeronautical fixed service 航空固定服务AFTN Aeronautical fixed telecommunication network航空固定电信网A/G Air to ground 空对地AGA Aerodromes, air routes and ground aids机场、航路和地面助航设施AGL Above ground level 高出地面AGN Again 再,再次AIREP Air report 空中报告ALA Alighting area 着陆区,降落区ALR Alerting 告警ALS Approach lighting system 进近灯光系统ALT Altitude 海拔高度ALTN Alternate 备降,备分AM Amplitude modulation 调幅AMA Area minimum altitude 区域最低高度AMDT Amendment 修订AMS Aeronautical mobile service 航空移动服务AMSL Above mean sea level 高出平均海平面AOC Airport obstacle chart 机场障碍物图AOR Area of responsibility 责任区APCH Approach 进近APP Approach control 进近管制APRX Approximate 大约APU Auxiliary power unit 辅助动力装置APV Approve 批准ARO Air traffic services reporting office 空中交通服务报告室ARP Airport reference point 机场基准点ARQ Automatic error correction 自动误差纠正ARR Arrival 到达ARSA Airport radar service area 机场雷达服务区ARSR Air route surveillance radar 空中航路监视雷达AS Altostratus 高层云ASC Ascend to 上升ASDA Accelerate-stop distance available 可用加速停止距离ASPH Asphalt 沥青ASR Airport surveillance radar 机场监视雷达ATA Actual time of arrival 实际到达时间ATC Air traffic control 空中交通管制ATD Actual time of departure 实际离场时间ATF Aerodrome traffic frequency 机场交通频率ATFM Air traffic flow management 空中交通流量管理ATIS Automatic terminal information service 自动终端情报服务ATM Air traffic management 空中交通管理ATN Aeronautical telecommunication network 航空电信网ATS Air traffic service 空中交通服务ATZ Aerodrome traffic zone 机场交通地带AUTH Authorized 授权AUW All up weight 起飞全重AUX Auxiliary 辅助的A VBL Available 有用的,可用性A VG Average 平均AWY Airway 航路AZM Azimuth 方位(角)B Blue 兰色(南北向辅航路)BA Braking action 刹车效应BASE Cloud base 云底BC Back course 后航道BCN Beacon 灯标BCST Broadcast 广播BDRY Boundary 边界BFR Before 在…之前BGN Begin 开始BKN Broken 裂云BLDG Building 建筑物BLW Below …以下BRG Bearing 方位(角)BTL Between layers 云层之间,云层飞行BTN Between 在…之间BYD Beyond 超过C Degrees Celsius (Centigrade) 摄氏度CAAC Civil aviation administration of China 中国民用航空总局CAB Civil Aeronautics Board (美国)民用航空委员会CA T Clear air turbulence 晴空颠簸CA T Category 分类,类别CB Cumulonimbus 积雨云CEIL Ceiling 云高CGL Circling guidance light(s) 盘旋引导灯CH Channel 波道CHG Change 改变、换CIV Civil 民用CK Check 检查,校核CL Center line 中心线CLBR Calibration 校正CLG Calling 呼叫CLR Clear, clearance 放行,放行许可CLSD Closed 关闭CM Centimeter 厘米CMB Climb to 爬升至CNL Cancel or cancelled 取消CNS Communication, navigation and surveillance 通信、导航和监视COM Communications 通信CONC Concrete 混凝土COND Condition 条件,状况CONT Continue(s) 连续,连续的COORD Coordinates 坐标COP Change-over point 转换点COR Correct or correction 正确,更正CORR Corridor 走廊CPU Central processing unit 计算机中央处理系统CRP Compulsory reporting point 强制性位置报告点CRT Cathode ray tube 阴极射线管CRZ Cruise 巡航CTA Control area 管制区CTL Control 管制,控制CTN Caution 注意CTR Control zone 管制地带CWY Clearway 净空道DA Decision altitude 决断高度DCKG Docking 停靠DCT Direct 直线进近,直飞DEG Degree 度DEP Depart/departure 起飞或离场DEPT Department 部门DES Descend to 下降DEST Destination 目的地DEV Deviation 偏航,偏离DFTI Distance from touchdown indicator 离接地距离指示器DH Decision height 决断高DIST Distance 距离DIV Divert, diverting 改航,转向DLA Delay 延误DME Distance measuring equipment 测距仪DP Dew point temperature 露点DPT Depth 深度DR Dead reckoning 推测DRG During 在…期间DS Dust storm 尘暴DSB Double sideband 双边带DUR Duration 持续期,持续时间DVOR Doppler VOR 多普勒全向信标EAT Expected approach time 预计进近时间EET Expected elapsed time 预计航程(经过)时间EFC Expected further clearance 预计进一步放行许可ELEV Elevation 标高EM Emission 发射,发讯EMERG Emergency 紧急,应急ENG Engine 发动机ERR Error 错误EST Estimate 预计,估计ETA Estimated time of arrival 预计到达时间ETD Estimated time of departure 预计离场时间ETE Estimated time enroute 预计航路飞行时间ETO Estimated time over 预计飞越时间EXC Except 除…..之外EXP Expect 预期,希望EXTD Extend 延长、延伸F Degrees Fahrenheit 华氏(度)FAA Federal Aviation Administration 联邦航空局(美)FACFacilities 设施,设备FAF Final approach fix 最后进近定位点FAP Final approach point 最后进近点FAS Final approach segment 最后进近航段FAX Facsimile transmission 传真FC Funnel cloud 漏斗云FCST Forecast 预报FCT Friction coefficient 摩擦系数FG Fog 雾FIC Flight information center 飞行情报中心FIR Flight information region 飞行情报区FIS Flight information service 飞行情报服务FISA Automated Flight information service 自动飞行情报服务FL Flight level 飞行高度FLD Field 机场,场地FLG Flashing 闪光,照明弹FLT Flight 飞行,飞行航班FM From 自,从FM Frequency modulation 调频FMS Flight management system 飞行控制系统FMU Flight management unit 流量管理单位FNA Final approach 最后进近FPL Filed flight plan 申报的飞行计划FPM Feet per minute 英尺/分FPR Flight plan route 飞行计划路线FR Fuel remaining 剩余油量FREQ Frequency 频率FSL Full stop landing 全停着陆FSS Flight service station 飞行服务站FST First 第一FT Feet 英尺G Green 绿色(东西向主航路)GA General aviation 通用航空GCA Ground controlled approach (radar) 地面管制进近(雷达)GEO Geographic or true 地理的或真的GMT Greenwich mean time 地面管制GP Glide path 下滑道GPS Global positioning system 全球定位系统GRADU Gradually 逐渐地GS Glide slope 下滑坡度GS Ground speed 地速GWT Gross weight 全重H24 24 hour service 24小时服务HBN Hazard beacon 危险信标HC Critical height 临界高HDF High frequency direction finding station 高频定向台HDG Heading 航向HEL Helicopter 直升机HF High frequency (3-30 MHz) 高频HGT Height 高HJ Sunrise to sunset 日出至日没,昼间服务HLDG Holding 等待HN Sunset to sunrise 日没日出至,夜间服务HPA Hectopascal 百帕HS During hours of scheduled operations 按航班开放HIS Horizontal situation indicator 水平状态指示仪HST High speed taxiway turn-off 高速转出滑行道HX Irregular service 非定时服务Hz Hertz (cycles per second) 赫兹(每分钟周数)IAC Instrument approach chart 仪表进近图IAF Initial approach fix 起始进近定位点IAL Instrument approach and landing chart 仪表进近和着陆图IAP Instrument approach procedure 仪表进近程序IAR Intersection of air routes 航路交叉点IAS Indicated airspeed 指示空速IATA International air transport association 国际航空运输协会IBN Identification beacon 识别灯标ICAO International Civil Aviation Organization 国际民航组织IDENT Identification 识别,认别标志IF Intermediate approach fix 中间进近定位点IFR Instrument flight rules 仪表飞行规则IGS Instrument guiding system 仪表引导系统ILS Instrument landing system 仪表着陆系统IM Inner marker 内指点标IMC Instrument meteorological conditions 仪表气象条件IMG Immigration 入境,移民IMPT Important 重要INBD Inbound 进场,向台INFO Information 资料,情报INOP Inoperative 不工作INP If not possible 如不可能INPR In progress 在进行中INS Inertial navigation system 惯性导航系统INT Intersection 交叉点,联络道INTER Intermittent 间断的INTL International 国际的INTRG Interrogator 询问器INTRP Interrupted 中断,干扰IR Ice on runway 跑道积冰IS Island 岛屿ISA International standard atmosphere 国际标准大气JTST Jet stream 高空激流KG Kilogram 公斤KHz Kilohertz 千赫KM Kilometer 公里KMH Kilometer(s) per hour 公里/时KT Knots 海里/时KW Kilowatt 千瓦L Locator (Compass) 示位台LAT Latitude 纬度LB Pound 磅LCT Local time 当地时间LDA Landing distance available 可用着陆距离LDG Landing 着陆LDI Landing direction indicator 着陆方向指示器LEN Length 长度LF Low frequency 低频(30-300千赫)LGT Light, lighting 灯,灯光LIH Light intensity high 高强度灯LIL Light intensity low 低强度灯LIM Light intensity medium 中强度灯LLZ Localizer 航向道LMM Locator middle marker 示位台中指点标LOM Locator outer marker 示位台外指点标LONG Longitude 经度LORAN LORAN(long range air navigation system)罗兰(远程导航系统)LT Local time 当地时LVL Level 水平,层M Meters 米MAA Maximum authorized altitude 批准的最大高度MAG Magnetic 磁的MAINT Maintenance 维修,维护MAP Aeronautical maps and charts 航空地图和航图MAPT Missed approach point 复飞点MAR Marine (At sea) 在海上,在海洋MAX Maximum 最大的MB Millibar 毫巴MBZ Mandatory broadcast zone 强制广播区MCA Minimum crossing altitude 最低穿越高度MDA Minimum descent altitude 最低下降高度MDF Medium frequency direction-finding station 中频定向台MEA Minimum en-route altitude 最低航路高度MER True height above MSL 高出平均海平面的真高MET Meteorological 气象的METAR Aviation routine weather report (in aeronautical meteorological code)航空例行天气预报(用航空气象电码)MF Medium frequency 中频(300-3000赫兹)MHA Minimum holding altitude 最低等待高度MHz Megahertz 兆赫MID Mid-point (related to RVR) 中间点(关于跑道视程)MIL Military 军用,军事MIN Minutes 分钟MKR Marker radio beacon 无线电指点信标MLS Microwave landing system 微波着陆系统MM Middle marker 中指点标MM Millimeter 毫米MOA Military operating area 军事活动区MOC Minimum obstacle clearance (required) 最小超障余度(要求的)MOD Moderate 中度MOV Move, movement 活动,运动MPH Miles per hour 英里/小时MPS Meters per second 米/秒MPW Maximum permitted weight 最大允许重量MRA Minimum reception altitude 最低接受高度MRG Medium range 中程MS Minus 减,负MSA Minimum sector altitude 最低扇区高度MSG Message 电报MSL Mean sea level 平均海平面MT Mountain 山MTOW Maximum take-off weight 最大起飞重量MTW A Maximum total weight authorized 最大允许全重N Night, north or northern 夜间,北或北方NA Not authorized 不允许,不批准NA T North Atlantic 北大西洋NA V Navigation 导航NA V AID Navigational aid 导航设施NB Northbound 向北飞行的NC No change 无变化NCRP Non-compulsory reporting point 非强制性位置报告点NDB Non-directional radio beacon 无方向性信标NE Northeast 东北NEB North-eastbound 向东北飞的NEG No, negative 不,不是,不正确的NGT Night 夜,夜晚NIL None 没有NM Nautical miles 海里NML Normal 正常NOF International NOTAM office 国际航行通告室NAP Noise abatement procedure 消噪音程序NOTAM Notice to airman 航行通告NR Number 号码,数NW North-west 西北NWB North-westbound 向西北方向飞的NXT Next 下一个,下次OAC Oceanic area control center 海洋管制中心OAS Obstacle assessment surface 障碍物评价面OBS Observe, observed, observation 观测,观察OBST Obstruction 障碍物OCA Oceanic control area 海洋管制区OCA Obstacle clearance altitude 超障高度OCS Obstacle clearance surface 超障面OM Outer marker 外指点标OPN Open 开放OPR Operator, operate, operative 经营人,报务员,运行OPS Operations 运行,运转O/R On request 按要求,按申请OTS Out of service 不工作OVNGT Overnight 过夜PALS Precision approach light system 精密进近灯光系统PANS-OPS Procedures for air navigation services—aircraft operations航行服务程序-航空器运行PAPI Precision approach path indicator 精密进近航径指示器PAR Precision approach radar 精密进近雷达PARL Parallel 平行PCN Pavement classification number 道面等级序号PCZ Positive control zone 绝对管制地带PERM Permanent 永久的PJE Parachute jumping exercise 跳伞训练PLN Flight plan 飞行计划PN Prior notice required 需事先通知POB Persons on board 机上人员PRKG Parking 停机PROB Probability 概率,可能性PROC Procedure 程序PROP Propeller aircraft 螺旋桨航空器PROV Provisional 临时的,暂时的PS Plus 加、正PSG Passing 过往,经过PSGR Passenger 旅客PSN Position 位置PTN Procedure turn 程序转弯PWR Power 电源,功率QDM Magnetic bearing to facility 向台磁方位QDR Magnetic bearing from facility 背台磁方位QFU Magnetic orientation of runway 跑道磁向QTE True bearing 真方位QUAD Quadrant 象限R Red 红色(东西向辅航路)R Radar, right 雷达,右RA Radio altimeter 无线电高度表RAC Rules of the air and air traffic services空中规则和空中交通服务RAG Runway arresting gear 跑道制动装置RAI Runway alignment indicator 对准跑道指示器RB Rescue boat 救生艇RCA Reaching cruising altitude 到达巡航高度RCC Rescue co-ordination center 救援协调中心RCF Radio communication failure 无线电通讯失效RCL Runway centerline 跑道中心线RCLM Runway centerline markings 跑道中心线标志RCLR Recleared 再放行RDL Radial 径向线REC Receive, receiver 收,收到,接收REDL Runway edge light(s) 跑道边灯REF Reference 参阅REG Registration 登记,注册REIL Runway end identification lights 跑道端识别灯RENL Runway end light(s) 跑道端灯REP Reporting point 报告点REQ Request 请求RF Radio facility 无线电设施RFLG Refueling 加油(燃料)RH Right hand 右手(边)RL Report leaving 脱离报告RLCE Request level change en-route 请求在航路上改变高度层RLLS Runway lead-in lighting system 跑道引进灯光系统RMK Remarks 附注,备注RNA V Area navigation 区域导航/领航ROC Rate of climb 上升率,爬升率ROD Rate of descent 下滑率,下降率RPM Revolutions per hour 每分钟的转数RSCD Runway surface condition 跑道道面情况RSR En-route surveillance radar 航路监视雷达RTE Route 航路RTF Radiotelephony 无线电话RTG Radiotelegraphy 无线电报RTHL Runway threshold light(s) 跑道入口灯RTR Remote transmitter/receiver 遥控发射机/接收机RTS Return to service 恢复工作RTT Radio teletypewriter 无线电传打字机RTZL Runway touchdown zone light(s) 跑道接地带灯RVR Runway visual range 跑道视程RVV Runway visibility values 跑道能见度数值RWY Runway 跑道S South 南、南纬SAR Search and rescue 搜寻与援救SB Southbound 向南飞SDBY Stand by 等待,备份SE Southeast 东南SEB South-eastbound 向东南飞SEC Seconds 秒SECT Sector 扇区SELCAL Selective call system 选择呼叫系统SER Service 服务,工作SFC Surface 表面,道面SID Standard instrument departure 标准仪表离场SKED Schedule 定期SLW Slow 慢SMC Surface movement control 地面活动管制SMR Surface movement radar 地面活动雷达SN Snow 雪SNOWTAM Snow NOTAM 雪情通告SRA Special rules area 特殊规则区SRA Surveillance radar approach 监视雷达进近SRE Surveillance radar element 地面管制进近(GCA)的监视雷达部分SRG Short range 短程SSB Single sideband 单边带SSR Secondary surveillance radar 二次监视雷达SST Supersonic transport 超音速运输机STA Strait in approach 直线进近STAR Standard terminal arrival 标准终端进场STD Standard 标准STN Station 站,站位STNR Stationary 静止的STWL Stopway light(s) 停止道灯SUP Supplement 增补,补充SUPPS Regional supplementary procedures 地区补充程序SW Southwest 西南SWB South-westbound 向西南飞SWY Stopway 停止道T Temperature 温度TA Transition altitude 过度高度TAF Aerodrome forecast 机场天气预报TAIL Tail wind 顺风TAR Terminal area surveillance radar 终端区监视雷达TAS True airspeed 真空速TCA Terminal control area 终端管制区TDO Tornado 龙卷风TDZ Touchdown zone 接地区TEMPO Temporary 临时TEND Trend forecast 趋势预报TFC Traffic 交通TGL Touch-and-go landing 连续起落TGS Taxiing guidance system 滑行引导系统THR Threshold 跑道入口TKOF Take-off 起飞TMA Terminal control area 终端管制区TNA Turn altitude 转弯高度TML Terminal 终端,终端机场TOC T op of climb 爬升顶点TODA Take-off distance available 可用起飞距离TORA Take-off run available 可用起飞滑跑距离TP Turning point 转弯点TR Track 航迹,轨迹TRA Temporary reserved airspace 临时备用空域TRL Transition level 过度高度层TROP Tropopause 对流层顶TT Teletypewriter 电传打字机TURB Turbulence 颠簸TVOR Terminal VOR 终端甚高频全向信标TWR Tower 塔台TWY Taxiway 滑行道TWYL Taxiway-link 滑行联络道TXT Text 电文TYP Type of aircraft 机型TYPH Typhoon 台风UAA Upper advisory area 高空咨询区UAB Until advised by…直到由…通知UAC Upper area control center 高空区域管制中心UAD Upper advisory route 高空咨询航路UAR Upper air route 高空航路UFN Until further notice 直至进一步通知UGT Urgent 紧急UHF Ultra high frequency (300-3000MHz) 超高频(300-3000兆赫)UIC Upper information center 高空情报中心UIR Upper flight information region 高空飞行情报区UNL Unlimited 无限制U/S Unserviceable 不能使用USB Upper sideband 上边带UTA Upper control area 高空管制区UTC Coordinated universal time 协调世界时UWY Upper airway 高空航路V AC Visual approach chart 目视进近图V AR Magnetic variation 磁差V ASIS Visual approach slope indicator system 目视进近坡度指示系统VDF VHF direction finding station 甚高频定向台VDP Visual descent point 目视下降点VFR Visual flight rules 目视飞行规则VHF Very high frequency (30-300MHz) 甚高频VIP Very important person 要客VIS Visibility 能见度VLF Very low frequency 甚低频VMC Visual meteorological conditions 目视气象条件VNA V Vertical navigation 垂直导航VOLMET Meteorological information for aircraft in flight供飞行中航空器用的气象情报VOR VHF Omnidirectional range 甚高频全向信标VSP Vertical speed 垂直速度VTOL Vertical take-off and landing 垂直起降VV Vertical visibility 垂直能见度W West, white 西,白色WAC World Aeronautical Chart 世界航图(1:1000,000) WB Westbound 向西飞WDI Wind direction indicator 风向指示器WEF With effect from 自xx起生效WIE With immediate effect 立即生效WIP Work in progress 工程在进行中WO Without 没有WPT Way-point 航路点WRNG Warning 警告,报警WS Wind shear 风切变WT Weight 重量WX Weather 天气X Cross 交叉,十字XNG Crossing 穿越Y Yellow 黄色YDS Zulu time 格林尼治平时Z Coordinated universal time 协调世界时。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
itools – p. 14/2
What’s new
Credits: Eduardo Corrales (TMX). Roberto Quero (TMX). Søren Roug (TMX, XLIFF, User Interfaces, Danish translation). Cornel Nitu (TMX, XLIFF, User Interfaces). Alexey Lubimov (Russian translation). Mario Olimpio de Menezes (Portuguese translation). Rodrigo Senra (Portuguese translation, API improvements). Marco Bizzarri (Italian translation, bug fixes).
Localizer 1.1 and beyond
´˜ J. David Ibanez
jdavid@
itools – p. 1/2
Introduction: Who is the speaker
Python developer for 8 years. Zope developer for 6 years. CTO of Itaapy, a (French) company specialized on web applications development. Lead developer of the itools library, the iKaaro CMS, and the Localizer Zope product.
itools – p. 17/2
Future developments
Localizer 2.0 New internationalization and localization techniques already available in itools will be deployed for Localizer. Non-intrusive semi-automatic translation for both text documents and templates. Text segmentation. Support for both Zope 2 and Zope 3, smooth transition from one to another. Plug-in Localizer to external translation workbenches.
/tmx/
Import and Export from and to TMX files is provided for the object types MessageCatalog and LocalContent.
itools – p. 12/2
What’s new
itools – p. 10/2
What’s new
Native support for the i18n namespace from Zope Page Templates (ZPT). For example, with the code:
<h1 i18n:translate="">Hello World</h1>
In runtime a translation will be looked up in the MessageCatalog instance for the default domain.
itools – p. 11/2
What’s new
Support for Translation Memory eXchange: TMX is the vendor-neutral open XML standard for the exchange of Translation Memory (TM) data created by Computer Aided Translation (CAT) and localization tools
itools – p. 5/2
Overview
With Zope applications can be developed two ways: Through the Web Through the Code Localizer provides solutions for both.
itools – p. 6/2
itools – p. 15/2
Future developments
itools – p. 16/2
Future developments
Localizer 1.2 Improve the user interface (ZMI), specially for the Import/Export screens. Improve interoperability with other Zope technologies, e.g. the CMF. Maybe integrate filesystem message catalogs from CMFLocalizer. More code refactoring (move TMX and XLIFF support to itools.tmx and itools.xliff).
Overview
For Through the Web development Localizer provides four object types:
MessageCatalog Allows to internationalize and localize the user interface. Localizer Allows to customize the language negotiation policy. LocalContent Allows to manage multilingual text content. LocalFolder Generic solution to internationalize whatever kind of content (images, etc.).
itools – p. 20/2
பைடு நூலகம்
itools – p. 18/2
References
itools – p. 19/2
References
Web Site, /localizer Mailing list, /mailman/listinfo/localizer Contact J. David Ibáñez, jdavid@
Support for XML Localisation Interchange File Format: XLIFF is a specification for the loss-less interchange of localizable data and its related information. It is tool-neutral, has been formalized as an XML vocabulary (through XML schema), and features an extensibility mechanism.
itools – p. 2/2
Summary
Overview of Localizer What’s new in Localizer 1.1 Future developments References
itools – p. 3/2
Overview
itools – p. 4/2
Overview
itools – p. 7/2
Overview
For Through the Code development Localizer allows to: Develop multilingual products (heavily relies on the GNU gettext tools and the itools Python library). Define new object types for multilingual content. Some Localizer based products include: TuMatXa, Translation Memory Repository / SilvaLocalContent, Locale aware Silva content objects /Members/camil7 Squishdot-Borax, international version of Squishdot /zope/products
itools – p. 8/2
What’s new in Localizer 1.1
itools – p. 9/2
What’s new
Summary: Support for the i18n namespace of ZPT. Support for Tranlastion Memory eXchange (TMX). Support for XML Localisation Interchange File Format (XLIFF). Other changes. Credits.
What’s new
Other changes: Vast improvements of the user interfaces (ZMI), specially for LocalContent objects. New translations available: Danish, Italian, Portuguese and Russian. Packaging changes, most notably some code not specific to Zope has been moved to the itools Python library.