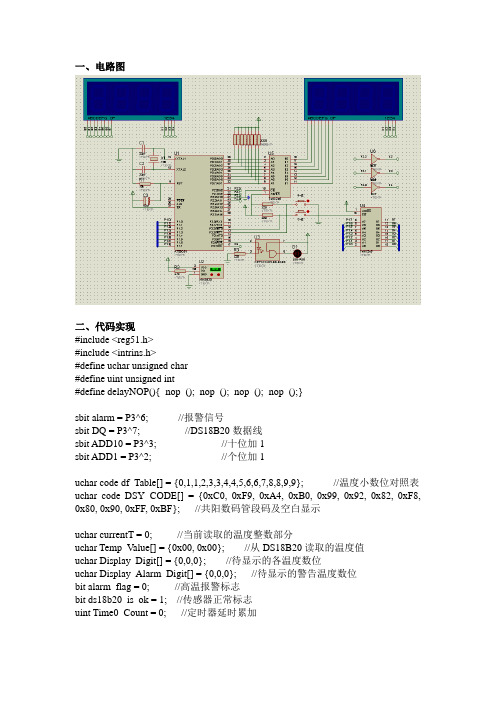
基于51单片机DS18B20温度传感器的C语言程序和电路
基于51单片机的18B20温度计C程序
本程序为本人用单片机80c51与18b20做实验时写的,其中有些是汉语拼音,便于咱们中国同胞们理解.仅供参考#include <reg52.h>#define uint unsigned int#define uchar unsigned charuchar tab[]="0123456789WD:C";sbit ds=P2^6;sbit rs=P3^4;sbit rw=P3^5;sbit en=P3^6;uchar s,g,shu;/***延时2tus***/yanshi(uchar t){while(--t){;}}/***延时tms** */delay(uint t){uchar a,b;for(a=t;a>0;a--)for(b=110;b>0;b--);}/***18B20初始化***/chushi(){ds=0;yanshi(250); //延时500usds=1;yanshi(2);}/***等待应答***/yingda(){while(ds);while(~ds);yanshi(2);}/***写一个字节***/w_dat(uchar dat){uchar i;for(i=0;i<8;i++){dat=dat>>1;ds=0;yanshi(8);ds=CY;yanshi(30);ds=1;}}/***读一个字节***/ uchar du_dat(){uchar i,dat;for(i=0;i<8;i++){ dat=dat>>1;ds=0;yanshi(1);ds=1;if(ds==1){dat=dat|0x80;}yanshi(30);}return dat;}/***启动温度转换***/ zhuanhuan(){chushi();yingda();delay(1);w_dat(0xcc);w_dat(0x44);}/***读取温度***/uchar du_wendu(){uchar a,b,dat;chushi();yingda();delay(1);w_dat(0xcc);w_dat(0xbe);a=du_dat(); //低位字节;b=du_dat(); //高位字节;dat=(b<<4)|(a>>4);return dat;}////////////////////////////// 1602液晶/////////////////////////////w_ml(uchar com){rs=0;P0=com;delay(5);en=1;delay(5);en=0;}chushihua(){rw=0;en=0;w_ml(0x38);w_ml(0x0c);w_ml(0x06);w_ml(0x01); }w_1602(uchar date){rs=1;P0=date;delay(5);en=1;delay(5);en=0;}xianshi(){w_ml(0x80);w_1602(tab[10]);w_1602(tab[11]);w_1602(tab[12]);w_1602(tab[s]);w_1602(tab[g]);w_1602(tab[13]);}/***************//** 主函数**//**************/main(){chushihua();while(1){delay(1);zhuanhuan();delay(10);shu=du_wendu();s=shu/10;g=shu%10;xianshi();}}。
51单片机+ds1302+DS18b20温度时钟(电路图+C语言程序)
时钟电路图:*■11PCB板:酱时井務ft是用诵m-pdfMerisi 口叵因Fjr 齐舱 C :s ® 工细理沖缶皿ndm - * TfS ' 4' 包田U i > 'ir ft ZS:MZ fH钟些fl是用说町-Pdf Wirrcf闻礒雜sbit dis_ bitlsbit dis_ bit2sbit dis_ bit3sbit dis_ bit4sbit dis_ bit5sbit dis_ bit6sbit ledl _bitsbit led2 ! bit=P2A7; II定义数码管控制口=P2A6; II定义数码管控制口=卩2八4; II定义数码管控制口=卩2八3; II定义数码管控制口=P2A1; II定义数码管控制口=P2A0; II定义数码管控制口=P2A2; II定时LED勺控制口=P2A5; II定时LED勺控制口单片机程序:/*===================================================================调试要求:1. MCU:AT89S52 芯片或AT89C522. 晶振:12MHz功能:多功能时钟+温度计/#inelude <reg52. h>#inelude vintrins . h>訂开始 LJ-雲匕®务如1痒3月计ttVl. •呈T』d"吐拠席射■ w耳pg文宇■[豹…SS时軽件思冃说#define uehar #define uint unsigned char unsigned intsbit s1_bit =P1A 0; // 定义S1 控制口 sbit s2_bit =P01; // 定义 S2控制口 sbit s3_bit =P02; // 定义 S3控制口 sbit dq_ds18b20 =P3A3;// 定义控制 DS18B20 sbit speak =P3A7; //定义蜂鸣器控制口sbit clk_ds1302 =P3A6; // 定义控制 DS1302勺时钟线 sbit io_ds1302 =P3A5;//定义控制DS1302勺串行数据 sbit rest_ds1302 =P3A4;#define smg_data P0 //定义数码管数据口void delay_3us(); //3US 的延时程序 void delay_8us(ui nt t);//8US 延时基准程序void delay_50us(ui nt t); //void display1(uchar dis_data); void display2(uchar dis_data); void display3(uchar dis_data); void display4(uchar dis_data); void display5(uchar dis_data); void display6(uchar dis_data);void init_t0(); //定时器0初始化函数 void dis_led(); //LED 处理函数 void judge_s1(); //S1 按键处理函数void judge_s2(); //S2 按键处理函数 void judge_s3(); //S3 按键处理函数void dis(uchar s6,uchar s5,uchar s4,uchar s3,uchar s2,uchar s1); 示子程序 void dis_sa n( uchar s6,uchar s5,uchar s4,uchar s3,uchar s1,uchar san); 〃闪烁显示子程序 void judge_dis(); //显示处理函数 void judge_clock(); // 显示处理函数 void set_ds1302(); // 设置时间void get_ds1302();// 读取当前时间void w_1byte_ds1302(uchar t); // 向 DS130写一个字节的数据 uchar r_1byte_ds1302(); // 从DS130读一个字节的数据//DS18B20测温函数定义延时50*T 微妙函数的声明//数码管1显示子程序 //数码管2显示子程序 //数码管3显示子程序 //数码管4显示子程序 //数码管5显示子程序 //数码管6显示子程序//显 s2,ucharvoid w_1byte_ds18b20(uchar value); // 向DS18B2写一个字节ucharr_1byte_ds18b20( void ); // 从DS18B2读取一个字节的数据voidrest_ds18b20( void ); //DS18B20复位程序void readtemp_ds18b20( void ); // 读取温度void dis_temp(); //温度显示函数//共阳数码管断码表const uchar tabl1[16] ={ 0xc0,0xf9,0xa4,0xb0,0x99,0x92,// 0 1 2 3 4 50x82,0xf8,0x80,0x90,0x86,0x87,0xFF,//6 7 8 9 E T B0xc6,0xbf,0xff };// C -const uchar tabl3[] ={ 0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x08,0x08,0x09,0x09 };uchar t0_crycle;uchar hour_co un t, minu te_c oun t,sec on d_co un t,msec ond_count;uchar clock_hour,clock_m inu te;uchar coun tdow n_sec ond;uchar coun tdow n_hour,co un tdow n_min ute;uchar clock_en; //闹钟关闭和开启的标志,1开启,0关闭uchar flag1,sec on d_flag,za ncun 1,za ncun 2,za ncun3;uchar zancun4 ,za ncun 5,za ncun 6,za ncun7;uchar clock_flag,co un tdow n_flag;uchar msec on d_mi nute,msec on d_sec on d,mseco nd_mseco nd,mseco nd_flag; // 秒表相关参数uint speak_c ount;uchar templ,temph,temp_flag;uchar t_b,t_s,t_g,t_x,temp_flag2; //从左到右分别存储温度百位,十位,个位,小数位uchar tab23[3]; 〃二{0x40,0x59,0x23,0x28,0x11,0x06,0x09};// 上电时默认的时间//主程序void main(){P3 =0x00;flag1 =0;zancun3 =0;msecond_minute =0; //置秒表相关参数为0msecond_second =0;msec on d_msec ond =0;speak =1;//关闭蜂鸣器speak_co unt =0;clock_hour =0;clock_m inute =0;clock_flag =0;countdown_flag =0; //倒计时标志位为0clock_en =0;//开机时默认关闭闹钟ini t_t0();TRO =1;//// set_ds1302();〃设置DS1302勺初始时间//接下来开始编写让数码管显示的程序while (1){get_ds1302();judge_dis(); // 显示处理judge_s1();judge_s2();judge_s3();judge_clock(); //闹钟处理程序} _}void timerO() interrupt 1{TH0=(65536-50000)/256;TL0=(65536 - 50000)%256; t0_crycle ++;if (t0_crycle ==2) // 0.1 秒{t0_crycle =0;msec on d_flag =1;msec ond_count ++;if (msecond_count==10)//1 秒{ _msec on d_co unt =0;sec on d_flag =1;}}}//**************************************************//显示处理函数void judge_dis(){if (flag1 ==0){if (second_flag ==1){ _zancun7 ++;sec on d_flag =0;} _if (zancun7 <1){if (temp_flag2 ==1){ 一readtemp_ds18b20(); // 读取温度temp_flag2 =0;厂dis_temp(); //温度显示函数}if (zancun7 >=1){temp_flag2 =1;zancun4 =hour_count &0xf0;zancun4 >>=4;zancun5 =minute_count&0xf0;zancun5 >>=4;zancun6 =sec on d_co unt&0xf0;zancun6 >>=4;dis(za ncun4 ,hour_co unt &0x0f,za ncun5,minu te_co unt &0x0f,za ncun 6,sec ond_ cou nt &0x0f);dis_led();if (zancun7 ==5)zancun7 =0;}}if (flag1 !=0){switch (flag1){case 1:dis(5,10,11,1,12,12); // 显示SET1led1_bit =1;led2_bit =1;break;case 2:dis(5,10,11,2,12,12); // 显示SET2break;case 3:dis(5,10,11,3,12,12); // 显示SET3break;case 4:dis(5,10,11,4,12,12); // 显示SET4break;case 5:dis(5,10,11,5,12,12); // 显示SET5break;case 6:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,1); break;case 7:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,2); break;case 8:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,3); break;case 9: //进入修改时间,时间分位个位闪烁dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,12,4); break;case 10: //进入修改闹钟,闹钟小时十位闪烁dis_san(zancunl / 10,zancunl %10,zancun2/ 10,zancun2 %0,12,zancun3,1); break;case 11://进入修改闹钟,闹钟小时个位闪烁dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2%0,12,zancun3,2); break;case 12: //进入修改闹钟,闹钟小时十位闪烁dis_sa n(zan cu n1 / 10,za ncun1 %10,za ncun 2/ 10,za ncu n2%0,12,za ncun 3,3);break;case 13: //进入修改闹钟,闹钟小时个位闪烁dis_sa n(zan cu n1 / 10,za ncun1 %10,za ncun 2/ 10,za ncu n2%0,12,za ncun 3,4);break;case 14: //进入修改闹钟的开关dis_sa n(zan cu n1 / 10,za ncun1 %10,za ncun 2/ 10,za ncu n2%0,12,za ncun 3,6);break;case 15:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,1);break;case 16:dis_san(zancun1 / 10,zancunl %10,zancun2/10,zancun2%0,zancun3/ 10,zancun3%10,2);break;case 17:dis_san(zancun1 / 10,zancunl %10,zancun2/ 10,zancun2%0,zancun3/ 10,zancun 3%10,3);break;case 18:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,4);break;case 19:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,5);break;case 20:dis_sa n(zancun1 / 10,za ncun1 %10,za ncun 2/ 10,za ncun 2%0,za ncun3/ 10,za ncun 3%10,6);break;case 21:if (second_flag ==1){ _sec on d_flag =0;countdown_second --;if (countdown_second ==255){ _coun tdow n_sec ond =59;countdown_minute --;if (countdown_minute ==255){ _coun tdow n_min ute =59;countdown_hour --;if (countdown_hour ==255){flag1 =22;coun tdow n_min ute =0;coun tdow n_hour =0;coun tdow n_sec ond =0;coun tdow n_flag=1;_ } } } }dis(countdown_hour / 10,countdown_hour %10,countdown_minute / 10,countdown _minute%10,countdown_second/ 10,countdown_second%10); //break; case 22:{ speak =1;}dis(countdown_hour / 10,countdown_hour %10,countdown_minute / 10,countdown _minute%10,countdown_second/ 10,countdown_second%10); //break; case 23: dis(msecond_minute / 10,msecond_minute%10,msecond_second/ 10,msecond_sec on d%10,mseco nd_msec on d%0,12);break; case 24:if (msecond_flag ==1) { _msec on d_flag =0; msec on d_msec ond ++;if (msecond_msecon (==10){msec on d_msec ond =0; msec on d_sec ond ++;if (msecond_second==60) { _msecond_second =0; msec ond_minute ++;if (countdown_flag { _speak=0;if (second_flag { _sec on d_flag coun tdow n_flag} _ } else>0 &&countdown_flag <7)==1) =0; ++;if (msecond_minute==1OO) { _msec ond_minute =99;flagl =23;}}}}dis(msecond_minute / 10,msecond_minute%10,msecond_second/ 10,msecond_sec on d%10,mseco nd_msec on d%0,12);break;case 25:dis(zancun3 / 10,zancun3 %0,zancun2 / 10,zancun2 %10,zancun1 /10,zancun1 %0 );break;default :break;}}}//**************************************************〃S1按键处理函数void judge_s1(){ _s1_bit =1;//置IO为1,准备读入收据if (s1_bit ==0)//判断是否有按键按下{delay_50us(1); //延时,去除机械抖动if (s1_bit ==0){switch (flag1){case 0:case 1:case 2:case 3:case 4:case 6:case 7:case 8:case 10:case 11:case 12:case 13:case 15:case 16:case 17:case 18:case 19: flag1++;break;case 9: flag1=6;break;case 14: flag1=10;break;case 20: flag1=15;break;case 5:case 21:case 22:case 23: //系统从秒表状态复位case 24: //系统从秒表状态复位case 25: //系统从计数器复位flag1 =0;break;default :break;}while (s1_bit ==0){ _judge_dis();}〃等待按键释放}}}〃************************************************** 〃S2按键处理函数void judge_s2(){ _s2_bit =1; //置IO为1,准备读入收据if (s2_bit ==0)//判断是否有按键按下=0;{delay_50us(1); //延时,去除机械抖动 if (s2_bit ==0) { switch (flagl) { flag1 =6; zancun4 =hour_count &0xf0;zancun4 >>=4; zancun6 =hour_count &0x0f;zancun1=zancun4*10+zancun6; //zancun 1=hour_co unt; zancun5 =minute_count &0xf0; zancun5 >>=4; zancun6 =minute_count &0x0f; zancun2 =za ncun5* 10+za ncun6; case 1: //在显示SET 状态下按S2牛,进入修改时间 // zancun2=minu te_co unt; break; case 2: //在显示SET2犬态下按S2,进入设置闹钟 zancunl =clock_hour; zancun2 =clock_m inu te; flagl =10; break; case 6: //修改时钟小时十位状态下按 case 7: //修改时钟小时个位状态下按 case 8: //修改时钟分钟十位状态下按 case 9: //修改时钟分钟个位状态下按 〃zancun4=za ncun 1/10; 测S:SM tab23[2] =zancun1/10* 16+za ncu n1%10; tab23[1] hour_c ount minu te_c ount sec ond_co unt tab23[0]set_ds1302(); flag1//zancun 5=za ncun2&0 xf0; //zancun 5>>=4; =zancun2/10* 16+za ncu n2%10; =tab23[2]; =tab23[1]; =0; //设置DS130的初始时间 =0;break; case 10: //修改闹钟小时十位状态下按S2case 11: //修改闹钟小时个位状态下按S2case 12: //修改闹钟分钟十位状态下按S2 case 13: //修改闹钟分钟个位状态下按S2 case 14: //修改闹钟使能状态下按S2clock_hour clock_m inute clock_e n flag1=zancun1; =zancun2; =zancun3;=0;break;case 3:flagl =15;zancunl =co un tdow n_hour;zancun2 =co un tdow n_minu te;zancun3 =co un tdow n_sec ond;break;case 15:case 16:case 17:case 18:case 19:case 20:coun tdow n_hour =zancun1;coun tdow n_minute =za ncun2;coun tdow n_sec ond =za ncun3;flag1 =21;coun tdow n_flag =0;break;case 22:flag1 =21;break;case 21:flag1 =22;break;case 4:flag1 =23; //秒表暂停msec ond_minute =0;msecond_second =0;msec on d_msec ond =0;break;case 23:flag1 =24;break;case 24:flag1 =23;break;case 5:flagl =25;//进入计数器模式zancunl =0;zancun2 =0;zancun3 =0;break; default :break;}while (s2_bit ==0){ _judge_dis();}//等待按键释放}}}//**************************************************//S3按键处理函数void judge_s3(){ _s3_bit =1;//置IO为1,准备读入收据if (s3_bit ==0)//判断是否有按键按下{delay_50us(1); //延时,去除机械抖动if (s3_bit ==0){ _switch (flag1){case 6: //修改时间小时的十位数zancun1 +=10;if (zancun1 >=24)zancun1 =zancun 1%10;break;case 7: //修改时间小时的个位数za ncun1 =za ncu n1/10* 10+(za ncun1 %10+1) %10;if (zancun1 >=24)zancun1 =20;break;case 8: //修改时间分钟的十位数zancun2 +=10;if (zancun2 >=60)zancun2-=60;break;case 9: //修改时间分钟的个位数za ncun2 =za ncun2/10* 10+(za ncun2 %10+1) %10;break;case 10: //修改闹钟小时的十位数zancunl +=10;if (zancunl >=24)zancunl =zancun 1%10; break;case 11: //修改闹钟小时的个位数zancunl =za ncu n1/10* 10+(za ncun1 %10+1) %10;if (zancun1 >=24)zancun1 =20;break;case 12: //修改闹钟分钟的十位数zancun2 +=10;if (zancun2 >=60)zancun2-=60; break;case 13: //修改闹钟分钟的个位数zan cu n2 =za ncun2/10* 10+(za ncun2 %10+1) %10;break;case 14:zancun3 A=1;break;case 15: //修改倒计时小时的十位数zancun1 +=10;if (zancun1 >=100)zancun 1 -=100; break;case 16: //修改倒计时小时的个位数zancun1 =za ncu n1/10* 10+(za ncun1 %10+1) %10;break;case 17: //修改倒计时分钟的十位数zancun2 +=10;if (zancun2 >=60)zancun2-=60; break;case 18: //修改倒计时分钟的个位数zan cu n2 =za ncun2/10* 10+(za ncun2 %10+1) %10;break;case 19: //修改倒计时秒的十位数zancun3 +=10;if (zancun3 >=60)zancun3-=60; break;case 20: //修改倒计时秒的个位数zan cu n3 =za ncun3/10* 10+(za ncun3 %10+1) %10;break;case 21:case 22: //coun tdow n_hour =zancun1;coun tdow n_minute =za ncun2;coun tdow n_sec ond =za ncun3;flagl =21;break;case 23:case 24: //秒表复位flag1 =24;msec ond_minute =0;msecond_second =0;msec on d_msec ond =0;break;case 25:zancun1 ++;if (zancun1 ==100){zancun1 =0;zancun2 ++;if (zancun2 ==100){zancun2 =0;zancun3 ++;}}break;default : break;}while (s3_bit ==0){ _judge_dis();}〃等待按键释放}}} //显示处理函数void judge_clock() {zancun4 =hour_count &0xf0;zancun4 >>=4;zancun6 =hour_count &0x0f;zancun4 *=10;zancun4 +=za ncun6;zancun5=minute_count &0xf0;if (san ==1){zancun5 >>=4;zancun6 =minute_count &0x0f;zancun5 *=10;zancun5 +=za ncun6;if (msecond_count<=5) {speak =0; speak_co unt ++;}else{speak =1;}}else{speak =1;}}〃****************************************////闪烁显示子程序void dis_sa n( uchar s6,uchar s5,uchar s4,uchar s3,uchars1,uchar san){if (clock_hour ==zancun4 &&clock_minute ==zancun5){ 一 一if (clock_en { _ speak_co unt clock_flag speak_co unt} _ } else{clock_flag =0;} _if{ (clock_flag ==1 ==1&&clock_flag ==0)=0; //开启蜂鸣器=1;=0;&&speak_count <400)s2,ucharif (msecond_count<5) { _ display1(s6);}}else{display1(s6);}if (san ==2){if (msecond_count<5) { _ display2(s5);}}else{display2(s5);}if (san ==3){if (msecond_count<5) { _ display3(s4);}}else{display3(s4);}if (san ==4){if (msecond_count<5) { _ display4(s3);}}else{display4(s3);}if (san ==5){if (msecond_count<5){ _ display5(s2);}}else{display5(s2);}if (san ==6){if (msecond_count<5){ _ display6(s1);}}else{ display6(s1);}}〃****************************************//时钟显示程序void dis(uchar s6,uchar s5,uchar s4,uchar s3,uchar s2,uchar s1) { display1(s6);display2(s5);display3(s4);display4(s3);display5(s2);display6(s1);}〃********************************************************************************************void init_tO(){ _TMOD0x01;〃设定定时器工作方式1,定时器定时50毫秒TH0=(65536-50000)/256;TL0=(65536- 50000)%256;EA=1; //开总中断ET0=1; //允许定时器0中断t0_crycle =0; //定时器中断次数计数单元}//LED处理函数void dis_led(){if (msecond_count<5){ _Ied1_bit =1;Ied2_bit =1;}else{led1_bit =0;led2_bit =0;}}〃***************************************************************//功能:把数据1显示在数码管1上void display6(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit6 =0; // 锁存数据delay_50us(40); dis_bit6 =1;}〃***************************************************************//功能:把数据1显示在数码管1上void display5(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit5 =0; // 锁存数据delay_50us(40);dis_bit5 =1;} _〃***************************************************************//功能:把数据1显示在数码管1上void display4(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit4 =0; // 锁存数据delay_50us(40);dis_bit4 =1;} 〃***************************************************************//功能:把数据1显示在数码管1上void display3(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit3 =0; // 锁存数据delay_50us(40);dis_bit3 =1;}〃***************************************************************//功能:把数据1显示在数码管1上void display1(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit1 =0; // 锁存数据delay_50us(40);dis_bit1 =1;}〃***************************************************************//功能:把数据1显示在数码管1上void display2(uchar dis_data){ _smg_data =tabl1[dis_data]; // 送显示断码dis_bit2 =0; // 锁存数据delay_50us(40);dis_bit2 =1;}〃******************************************************************* *******************************// 函数名称:void delay_50US(unsigned int t)//功能:延时50*t(us)void delay_50us(uint t){ _unsigned char j;for (;t >0;t --){for (j =19;j >0;j --);}}〃******************************************************************* ************〃8微秒延时基准程序void delay_8us(uint t){while (-- t);}************〃3微秒延时程序void delay_3us() {}〃******************************************************************* ************//子程序功能:向DS18B2写一字节的数据void w_1byte_ds18b20(uchar value){uchar i =0;for (i =0;i <8;i ++){dq_ds18b20 =1;delay_3us();dq_ds18b20 =0; delay_8us(2);if ( value & 0x01) dq_ds18b20 =1; 〃DQ = 1 delay_50us(1); // 延时50us 以上delay_8us(2);value >>=1;}dq_ds18b20 =1; //DQ = 1}//读一个字节uchar r_1byte_ds18b20( void){ 一一uchar i =0;uchar value = 0;for (i =0;i <8;i ++){value >>=1;dq_ds18b20 =0;// DQ_L;delay_3us();dq_ds18b20 =1; 〃DQ_H;delay_8us(2);if (dq_ds18b20==1) value |= 0x80;delay_8us(6); // 延时40us}dq_ds18b20 =1;return value ;}11 ・**************************************************〃ds18b20复位子程序void rest_ds18b20( void){rest:delay_3us(); // 稍做延时delay_3us();dq_ds18b20 =1;delay_3us();dq_ds18b20 =0;// DQ_L; delay_50us(11); 〃480us<T<960usdq_ds18b20 =1; // 拉高总线delay_8us(5);if (dq_ds18b20==1){return ;}delay_50us(2); // 延时90usif (dq_ds18b20==1){return ;}else{goto rest;}}〃****************************************************//读取温度void readtemp_ds18b20( void){ _uchar temp32;rest_ds18b20();w_1byte_ds18b20(0xcc); //跳过读序列号的操作w_1byte_ds18b20(0x44); // 启动温度转换delay_8us(2);rest_ds18b20();w_1byte_ds18b20(0xcc); //跳过读序列号的操作w_1byte_ds18b20(0xbe); //读取温度寄存器等(共可读9个寄存器)前两个就是温度templ =r_1byte_ds18b20();temph =r_1byte_ds18b20();if ((temph &0xf0)) //判断温度的正负性{temp_flag =0; //温度为负数标志temph =-temph;tempi =-templ;t_x =tabl3[templ & OxOf]; // 计算温度的小数temp32 =temph & OxOf;temp32 <<=4;tempi >>=4;temp32 =temp32 | tempi;t_b =temp32/100%10; //计算温度的百位数据t_s =temp32/10%0;〃计算温度的十位数据t_g =temp32%0;〃计算温度的个位数据5else //为正数{t_x =tabl3[templ & 0x0f]; // 计算温度的小数temp32 =temph & 0x0f;temp32 <<=4;templ >>=4;temp32 =temp32 | templ;t_b =temp32/100%10; //计算温度的百位数据t_s =temp32/10%0;〃计算温度的十位数据t_g =temp32%0;〃计算温度的个位数据temp_flag =1;} _}void dis_temp() //温度显示函数{ _if (temp_flag =1){ _if (t_b ==0){dis(12,12,t_s,t_g,13,12);}else{dis(12,t_b,t_s,t_g,13,12);}}else{dis(14,t_b,t_s,t_g,13,12);}}/ / """""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""" / / , ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ############ //;子程序名:w_1byte_ds1302//;功能:向DS130写一个字节的数据void w_1byte_ds1302(uchar t){uchar i;for (i =0;i <8;i ++){if (t & 0x01){io_ds1302=1;}else{io_ds1302 =0;}clk_ds1302 =1;delay_3us();delay_3us();clk_ds1302 =0;delay_3us();delay_3us();t >>=1;}}/ / , ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ######//;子程序名:r_1byte_ds1302()//;功能:从DS130读一个字节的数据uchar r_1byte_ds1302(){ 一一uchar i,temp11 =0;io_ds1302 =1;//置10为1,准备读入数据for (i =0;i <8;i ++){temp11 >>=1;if (io_ds1302) temp11 |= 0x80;clk_ds1302 =1;delay_3us();delay_3us();clk_ds1302 =0;delay_3us();}return (temp11);}/ / """"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""/ / , JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ JJ """""""""""""""ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff//;子程序名:setbds1302//;功能:设置DS130初始时间,并启动计时void set_ds1302(){uchar i,j;rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();rest_ds1302 =1;delay_3us();w_1byte_ds1302(0x8e); // 写控制命令字delay_3us();w_1byte_ds1302(0x00); // 写保护关闭clk_ds1302 =1;delay_3us();for (i =0,j =0x80;i <7;i ++,j +=2){rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();rest_ds1302 =1;delay_3us();w_1byte_ds1302(j);delay_3us();w_1byte_ds1302(tab23[i]);delay_3us();delay_3us();clk_ds1302 =1;delay_3us();rest_ds1302 =0;delay_3us();delay_3us();} _rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();rest_ds1302 =1;delay_3us();w_1byte_ds1302(0x8e); delay_3us();w_1byte_ds1302(0x80); clk_ds1302 =1;delay_3us();rest_ds1302 =0;delay_3us();}/ / """"""""""""""""""""""""""""""""""""""""""""""""""""""""""""""""" / / , ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff //;子程序名:get1302void get_ds1302(){ _uchar temp11[7],i,j;for (i =0;i <7;i ++){temp11[i] =0;}for (i =0,j =0x81;i <7;i ++,j +=2){rest_ds1302 =0;delay_3us();clk_ds1302 =0;delay_3us();delay_3us();w_1byte_ds1302(j);temp11[i] =r_1byte_ds1302();delay_3us();clk_ds1302 =1;delay_3us();rest_ds1302 =0;delay_3us();} _if (temp11[0] != 0xff){second_count =temp11[0]; }if (temp11[1] != 0xff) // 数据验证{minute_count =temp11[1]; }if (temp11[2] != 0xff) // 数据验证{hour_count =temp11[2]; }// date=temp[3];//mon th=temp[4];// week=temp[5];//year=temp[6];}/*===================================================================调试要求:1. MCU:AT89S52 芯片或AT89C522. 晶振:12MHz功能:多功能时钟+温度计/#inelude <reg52. h>#inelude vintrins . h>sbit dis_bit1 =P2A 7; //定义数码管控制口sbit dis_bit2 =卩2八6;//定义数码管控制口sbit dis_bit3 =卩2八4;//定义数码管控制口sbit dis_bit4 =卩2八3;//定义数码管控制口sbit dis_bit5 =卩2八1; //定义数码管控制口sbit dis_bit6 =P2A0; //定义数码管控制口sbit led1_bit =卩2八2; // 定时 LED 勺控制口sbit led2_bit =卩2八5; // 定时 LED 勺控制口sbit s1_bit =P1A0; // 定义S1 控制口sbit s2_bit =P01; // 定义 S2空制口sbit s3_bit =P02; // 定义 S3控制口sbit dq_ds18b20 =P3A3;// 定义控制 DS18B20 sbit speak =P3A7; //定义蜂鸣器控制口sbit clk_ds1302 =P3A6; // 定义控制 DS1302勺时钟线 sbit io_ds1302 =P3A5;//定义控制DS1302勺串行数据sbit rest_ds1302 =P3A4;#define smg_data P0 //定义数码管数据口 void delay_3us(); //3US 的延时程序 void delay_8us(ui nt t); //8US 延时基准程序void delay_50us(ui nt t); // void display1(uehardis_data); voiddisplay2(uehar dis_data); void display3(uehar dis_data); void display4(uehar dis_data); void display5(uehar dis_data); void display6(uehar dis_data);void init_t0(); //定时器0初始化函数void dis_led(); //LED 处理函数void judge_s1();//S1 按键处理函数 void judge_s2(); //S2 按键处理函数void judge_s3(); //S3 按键处理函数 void dis(uehar s6,uehar s5,uehar s4,uehar s3,uehar s2,uehar s1); 示子程序 void dis_sa n( uchar s6,uehar s5,uehar s4,uehar s3,uehars1,uchar san); 〃闪烁显示子程序void judge_dis(); //显示处理函数void judge_clock(); // 显示处理函数void set_ds1302(); // 设置时间void get_ds1302(); // 读取当前时间#define uehar#define uintunsigned char unsigned int延时50*T 微妙函数的声明//数码管1显示子程序 //数码管2显示子程序 //数码管3显示子程序//数码管4显示子程序//数码管5显示子程序//数码管6显示子程序 //显s2,ueharvoid w_1byte_ds1302(uchar t); // 向DS130写一个字节的数据uchar r_1byte_ds1302(); // 从DS130读一个字节的数据〃*******************************************************************//DS18B20测温函数定义void w_1byte_ds18b20(uchar value); // 向DS18B2写一个字节ucharr_1byte_ds18b20( void ); // 从DS18B2读取一个字节的数据voidrest_ds18b20( void ); //DS18B20复位程序void readtemp_ds18b20( void ); // 读取温度void dis_temp(); //温度显示函数//共阳数码管断码表const uchar tabl1[16] ={ 0xc0,0xf9,0xa4,0xb0,0x99,0x92,// 0 1 2 3 4 50x82,0xf8,0x80,0x90,0x86,0x87,0xFF,//6 7 8 9 E T B0xc6,0xbf,0xff };// C -const uchar tabl3[] ={ 0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x08,0x08,0x09,0x09 };uchar t0_crycle;uchar hour_co un t, minu te_c oun t,sec on d_co un t,msec ond_count;uchar clock_hour,clock_m inu te;uchar coun tdow n_sec ond;uchar coun tdow n_hour,co un tdow n_min ute;uchar clock_en; //闹钟关闭和开启的标志,1开启,0关闭uchar flag1,sec on d_flag,za ncun 1,za ncun 2,za ncun3;uchar zancun4 ,za ncun 5,za ncun 6,za ncun7;uchar clock_flag,co un tdow n_flag;uchar msec on d_mi nute,msec on d_sec on d,mseco nd_mseco nd,mseco nd_flag; // 秒表相关参数uint speak_c ount;uchar templ,temph,temp_flag;uchar t_b,t_s,t_g,t_x,temp_flag2; //从左到右分别存储温度百位,十位,个位,小数位上电时默认的uchar tab23[3]; 〃二{0x40,0x59,0x23,0x28,0x11,0x06,0x09};//时间//主程序void main(){P3 =0x00;flag1 =0;zancun3 =0;msecond_minute =0; //置秒表相关参数为0msecond_second =0;msec on d_msec ond =0;speak =1;//关闭蜂鸣器speak_co unt =0;clock_hour =0;clock_m inute =0;clock_flag =0;countdown_flag =0; //倒计时标志位为0clock_en =0;//开机时默认关闭闹钟ini t_t0();TR0 =1;//// set_ds1302();〃设置DS130的初始时间//接下来开始编写让数码管显示的程序while (1){get_ds1302();judge_dis(); // 显示处理judge_s1();judge_s2();judge_s3();judge_clock(); //闹钟处理程序} _}void timer0() interrupt 1{TH0=(65536-50000)/256;TL0=(65536- 50000)%256;t0_crycle ++;if (t0_crycle ==2) // 0.1 秒{t0_crycle =0;msec on d_flag =1;msec ond_count ++;if (msecond_count==10)//1 秒。
我的51单片机之 温度传感器18B20 的C语言和汇编编程
{
TCZ=TCZ%100;//只显示小于 100 的整数温度
}
TC[1]=TCZ/10;
TC[0]=TCZ%10;
}
Hale Waihona Puke }void main() {
LEDCODE=0xFF; LED1=0; while(1) {
ReadTemp(); Disp(); } }
四、汇编程序: ;********************************************************************
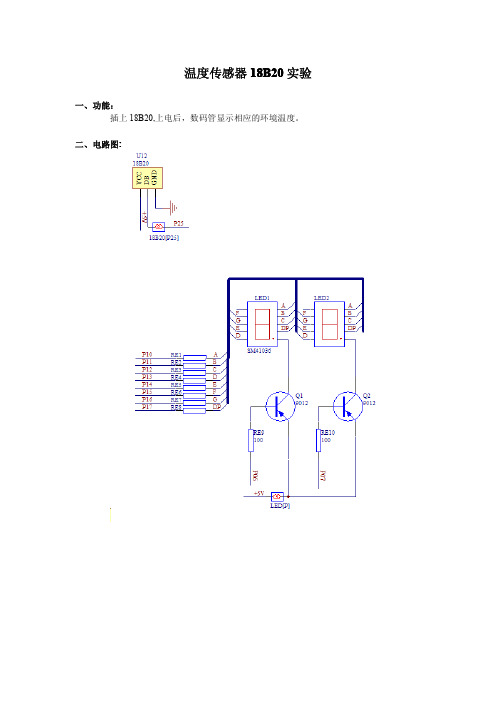
温度传感器 18B20 实验
一、功能: 插上 18B20,上电后,数码管显示相应的环境温度。
二、电路图:
三、C 程序: //******************************************************************** //读取 18B20 输出的温度数据(2 位)并在数码管上显示;made by luqichao //********************************************************************
unsigned char Reset(); unsigned char ReadByte(); void WriteByte(unsigned char Data); void ReadTemp(); //延时 void delay(unsigned char n) {
unsigned char i; for(i=0;i<n;i++) { } }
Data>>=1; CLK=0; NOP();NOP();NOP();NOP();NOP();NOP();//6us CLK=1; NOP();NOP();NOP();NOP();NOP();//4us Temp=CLK; if(Temp) {
单片机中使用DS18B20温度传感器C语言程序文件

单片机中使用DS18B20温度传感器C语言程序(参考1)/********************************************************************************DS18B20 测温程序硬件:AT89S52(1)单线ds18b20接P2.2(2)七段数码管接P0口(3)使用外部电源给ds18b20供电,没有使用寄生电源软件:Kei uVision 3**********************************************************************************/ #include "reg52.h"#include "intrins.h"#define uchar unsigned char#define uint unsigned intsbit ds=P2^2;sbit dula=P2^6;sbit wela=P2^7;uchar flag ;uint temp; //参数temp一定要声明为int 型uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71}; //不带小数点数字编码uchar code table1[]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef}; //带小数点数字编码/*延时函数*/void TempDelay (uchar us){while(us--);}void delay(uint count) //延时子函数{uint i;while(count){i=200;while(i>0)i--;count--;}}/*串口初始化,波特率9600,方式1 */void init_com(){TMOD=0x20; //设置定时器1为模式2 TH1=0xfd; //装初值设定波特率TR1=1; //启动定时器SM0=0; //串口通信模式设置SM1=1;// REN=1; //串口允许接收数据PCON=0; //波特率不倍频// SMOD=0; //波特率不倍频// EA=1; //开总中断//ES=1; //开串行中断}/*数码管的显示*/void display(uint temp){uchar bai,shi,ge;bai=temp/100;shi=temp%100/10;ge=temp%100%10;dula=0;P0=table[bai]; //显示百位dula=1; //从0到1,有个上升沿,解除锁存,显示相应段dula=0; //从1到0再次锁存P0=0xfe;wela=1;wela=0;delay(1); //延时约2ms P0=table1[shi]; //显示十位dula=1;dula=0;P0=0xfd;wela=1;wela=0;delay(1);P0=table[ge]; //显示个位dula=1;dula=0;P0=0xfb;wela=1;wela=0;delay(1);}/*****************************************时序:初始化时序、读时序、写时序。
ds18b20的C语言完整程序(c51)
ds18b20的C语言完整程序(c51)(可组网数字式温度传感器)发布日期:[2005-05-10]作者:(sparkstar)//DS1820 C51 子程序//这里以11.0592M晶体为例,不同的晶体速度可能需要调整延时的时间//sbit DQ =P2^1;//根据实际情况定义端口typedef unsigned char byte;typedef unsigned int word;//延时void delay(word useconds){for(;useconds>0;useconds--);}//复位byte ow_reset(void){byte presence;DQ = 0; //pull DQ line lowdelay(29); // leave it low for 480usDQ = 1; // allow line to return highdelay(3); // wait for presencepresence = DQ; // get presence signaldelay(25); // wait for end of timeslotreturn(presence); // presence signal returned} // 0=presence, 1 = no part//从 1-wire 总线上读取一个字节byte read_byte(void){byte i;byte value = 0;for (i=8;i>0;i--){value>>=1;DQ = 0; // pull DQ low to start timeslotDQ = 1; // then return highdelay(1); //for (i=0; i<3; i++);if(DQ)value|=0x80;delay(6); // wait for rest of timeslot}return(value);}//向 1-WIRE 总线上写一个字节void write_byte(char val){byte i;for (i=8; i>0; i--) // writes byte, one bit at a time {DQ = 0; // pull DQ low to start timeslotDQ = val&0x01;delay(5); // hold value for remainder of timeslotDQ = 1;val=val/2;}delay(5);}//读取温度char Read_Temperature(void){union{byte c[2];int x;}temp;ow_reset();write_byte(0xCC); // Skip ROMwrite_byte(0xBE); // Read Scratch Padtemp.c[1]=read_byte();temp.c[0]=read_byte();ow_reset();write_byte(0xCC); //Skip ROMwrite_byte(0x44); // Start Conversionreturn temp.x/2;}。
51单片机Ds18b20温度传感器程序

* 实验名 : 18B20温度显示试验* 实验说明 : 数码管显示温度值,并且将温度值通过串口发送到电脑上。
* 连接方式 : 见连接图temp.h#ifndef __TEMP_H_#define __TEMP_H_#include<reg51.h>//---重定义关键词---//#ifndef uchar#define uchar unsigned char#endif#ifndef uint#define uint unsigned int#endif//--定义使用的IO口--//sbit DSPORT=P3^7;//--声明全局函数--//void Delay1ms(uint );uchar Ds18b20Init();void Ds18b20WriteByte(uchar com);uchar Ds18b20ReadByte();void Ds18b20ChangTemp();void Ds18b20ReadTempCom();int Ds18b20ReadTemp();#endiftemp.c#include"temp.h"/******************************************************************************** 函数名: Delay1ms* 函数功能: 延时函数* 输入: 无* 输出: 无*******************************************************************************/void Delay1ms(uint y){uint x;for( ; y>0; y--){for(x=110; x>0; x--);}}/******************************************************************************** 函数名: Ds18b20Init* 函数功能: 初始化* 输入: 无* 输出: 初始化成功返回1,失败返回0*******************************************************************************/ uchar Ds18b20Init(){uchar i;DSPORT = 0;//将总线拉低480us~960usi = 70;while(i--);//延时642usDSPORT = 1;//然后拉高总线,如果DS18B20做出反应会将在15us~60us后总线拉低i = 0;while(DSPORT)//等待DS18B20拉低总线{Delay1ms(1);i++;if(i>5)//等待>5MS{return 0;//初始化失败}}return 1;//初始化成功}/******************************************************************************** 函数名: Ds18b20WriteByte* 函数功能: 向18B20写入一个字节* 输入: com* 输出: 无*******************************************************************************/void Ds18b20WriteByte(uchar dat){uint i, j;for(j=0; j<8; j++){DSPORT = 0;//每写入一位数据之前先把总线拉低1usi++;DSPORT = dat & 0x01; //然后写入一个数据,从最低位开始i=6;while(i--); //延时68us,持续时间最少60usDSPORT = 1;//然后释放总线,至少1us给总线恢复时间才能接着写入第二个数值dat >>= 1;}}/******************************************************************************** 函数名: Ds18b20ReadByte* 函数功能: 读取一个字节* 输入: com* 输出: 无*******************************************************************************/ uchar Ds18b20ReadByte(){uchar byte, bi;uint i, j;for(j=8; j>0; j--){DSPORT = 0;//先将总线拉低1usi++;DSPORT = 1;//然后释放总线i++;i++;//延时6us等待数据稳定bi = DSPORT;//读取数据,从最低位开始读取/*将byte左移一位,然后与上右移7位后的bi,注意移动之后移掉那位补0。
基于DS18B20的水温控制系统c语言实现
一、电路图二、代码实现#include <reg51.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned int#define delayNOP(){_nop_();_nop_();_nop_();_nop_();}sbit alarm = P3^6; //报警信号sbit DQ = P3^7; //DS18B20数据线sbit ADD10 = P3^3; //十位加1sbit ADD1 = P3^2; //个位加1uchar code df_Table[] = {0,1,1,2,3,3,4,4,5,6,6,7,8,8,9,9}; //温度小数位对照表uchar code DSY_CODE[] = {0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8, 0x80, 0x90, 0xFF, 0xBF}; //共阳数码管段码及空白显示uchar currentT = 0; //当前读取的温度整数部分uchar Temp_Value[] = {0x00, 0x00}; //从DS18B20读取的温度值uchar Display_Digit[] = {0,0,0}; //待显示的各温度数位uchar Display_Alarm_Digit[] = {0,0,0}; //待显示的警告温度数位bit alarm_flag = 0; //高温报警标志bit ds18b20_is_ok = 1; //传感器正常标志uint Time0_Count = 0; //定时器延时累加uchar alarm_temp; //报警温度//延时void Delay(uint x){while(--x);}//初始化ds18b20uchar Init_DS18B20(){uchar status;DQ = 1; Delay(8);DQ = 0; Delay(90);DQ = 1; Delay(8);status = DQ;Delay(100);DQ = 1;return status; //初始化成功返回0}//读一字节uchar ReadOneByte(){uchar i, dat = 0;DQ = 1; _nop_();for(i=0; i<8; i++){DQ = 0; dat >>= 1; DQ = 1; _nop_(); _nop_();if(DQ)dat |= 0x80;Delay(30);DQ = 1;}return dat;}//写一字节void WriteOneByte(uchar dat){uchar i;for(i=0; i<8; i++){DQ = 0; DQ = dat & 0x01; Delay(5); DQ = 1; dat>>=1;}}//读取温度值void Read_Temperature(){if(Init_DS18B20() == 1) //DS18B20故障ds18b20_is_ok = 0;else{WriteOneByte(0xCC); //跳过序列号WriteOneByte(0x44); //启动温度转换Init_DS18B20();WriteOneByte(0xCC); //跳过序列号WriteOneByte(0xBE); //读取温度寄存器Temp_Value[0] = ReadOneByte(); //温度低8位Temp_Value[1] = ReadOneByte(); //温度高8位ds18b20_is_ok = 1;}}//设置ds18b20温度报警值void set_Alarm_Temp_Value(uchar alarm_t){alarm_temp = alarm_t;Init_DS18B20();WriteOneByte(0xCC); //跳过序列号WriteOneByte(0x4E); //将设定的温度报警值写入ds18b20 WriteOneByte(alarm_t);WriteOneByte(0x7F); //12位精度Init_DS18B20();WriteOneByte(0xCC); //跳过序列号WriteOneByte(0x48); //温度报警值存入ds18b20}//显示当前传感器温度void Display_Temperature(){uchar i;uchar t = 150; //延时值char signed_current_temp;//查表得到温度小数部分Display_Digit[0] = df_Table[Temp_Value[0] & 0x0F];//获取温度整数部分(无符号)?currentT = ((Temp_Value[0] & 0xF0)>>4)|((Temp_Value[1] & 0x07)<<4);//当前值signed_current_temp = currentT;//高温标志设置alarm_flag = signed_current_temp >= alarm_temp ? 1 : 0;//将整数部分分解为二位待显示数字Display_Digit[2] = currentT % 100 / 10;Display_Digit[1] = currentT % 10;if(Display_Digit[2] == 0){Display_Digit[2] = 10;}//查表得到报警温度小数部分Display_Alarm_Digit[0] = df_Table[0];//将整数部分分解为二位待显示数字Display_Alarm_Digit[2] = alarm_temp % 100 / 10;Display_Alarm_Digit[1] = alarm_temp % 10;if(Display_Alarm_Digit[2] == 0){Display_Alarm_Digit[2] = 10;}//刷新显示若干时间for(i=0; i<30; i++){P1 = DSY_CODE[Display_Digit[0]]; //小数位P0 = DSY_CODE[Display_Alarm_Digit[0]]; //小数位P2 = 0xFE; Delay(t); P2 = 0xFF;P1 = (DSY_CODE[Display_Digit[1]]) & 0x7F; //个位及小数点P0 = (DSY_CODE[Display_Alarm_Digit[1]]) & 0x7F; //个位及小数点P2 = 0xFD; Delay(t); P2 = 0xFF;P1 = DSY_CODE[Display_Digit[2]]; //十位P0 = DSY_CODE[Display_Alarm_Digit[2]]; //十位P2 = 0xFB; Delay(t); P2 = 0xFF;}}//十位加1void Add_Ten(){while(ADD10 == 1);Delay(30);alarm_temp += 10;if(alarm_temp >= 100){alarm_temp = alarm_temp%100;}}//个位加1void Add_One(){while(ADD1 == 1);Delay(30);alarm_temp += 1;if(alarm_temp >= 100){alarm_temp = alarm_temp%100;}}//定时器中断,熄灭加热灯,停止加热void T0_INT() interrupt 1{TH0 = -1000 / 256;TL0 = -1000 % 256;if(++Time0_Count == 400){Time0_Count = 0;if(alarm_flag){alarm = 0;}}}//主程序void main(){IE = 0x82;TMOD = 0x01;TH0 = -1000 / 256;TL0 = -1000 %256;TR0 = 0;alarm = 1; //加温状态alarm_temp = 70; //初始报警温度Read_Temperature(); //读取温度Delay(50000);Delay(50000);while(1){Read_Temperature();if(ds18b20_is_ok){if(alarm_flag == 1)TR0 = 1;elseTR0 = 0;if(ADD10 == 0){Add_Ten();Delay(60);}if(ADD1 == 0){Add_One();Delay(60);}set_Alarm_Temp_Value(alarm_temp);Display_Temperature();}else{P1 = P0 = 0x00;P2 = 0xFF;}}}。
基于51单片机和DS18B20的数字温度计设计说明

基于51单片机和DS18B20的数字温度计设计说明
1.硬件设计:
-51单片机:选择合适的型号,如STC89C52或AT89C52等。
-DS18B20温度传感器:该传感器是一种数字温度传感器,具有单总线接口和高精度测量能力。
-接口电路:将51单片机和DS18B20传感器连接起来,要注意电平转换和信号线的阻抗匹配。
2.软件设计:
-初始化:在主函数中,首先对单片机进行初始化设置,包括时钟设置、串口配置等。
-DS18B20通信协议:使用单总线协议与DS18B20传感器进行通信,包括发送复位信号、读写数据等操作。
-温度测量:通过向DS18B20发送读取温度的命令,从传感器中读取温度值并保存。
-数据传输:将温度值转换为可显示的格式,如摄氏度或华氏度,并通过串口输出或LED显示。
3.程序流程:
-初始化单片机,设置时钟和串口参数。
-进入主循环,循环执行以下操作:
-发送复位信号,启动温度转换。
-等待转换完成,发送读取温度命令。
-读取温度值,并进行数据处理转换。
-输出温度值。
4.其他功能:
-可以添加LCD显示模块,将温度值显示在液晶屏上。
-可以添加按键输入模块,通过按键切换温度单位或进行其他操作。
需要注意的是,该设计只是一个简单的示例,实际应用中可能需要根据具体需求进行扩展和修改。
同时,在程序设计过程中,也要注意低功耗和数据稳定性等方面的考虑。
基于51单片机DS18B20温度传感器的C语言程序和电路
基于51单片机DS18B20温度传感器的C语言程序和电路DS18B20在外形上和三极管很像,有三只脚。
电压范围为3.0 V至5.5 V 无需备用电源测量温度位温度转换为12位数字格式最大值为750毫秒用户可定义的非易失性温度报警设置应用范围包敏感系统。
下面是DS18B20的子程序,本人用过完全可行的:#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intsbit DQ=P2^0;void reset(); //DS18B20 void write_byte(uchar val); //DS18B20写命令函数uchar read_byte(void); //DS18B20读1字节函数void read_temp(); //温度读取函数void work_temp(); //温度数据处理函数uchar data temp_data[2]={0x00,0x00};uchar data display[5]={0x00,0x00,0x00,0x00,0x00}; //对于温度显示值值uchar code ditab[16]={0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x0数部分查表main(){while(1){自己添加;}}void delay1(uint t){for(;t>0;t--);}///////温度控制子函数void reset(){uchar presence=1;while(presence){while(presence){DQ=1;_nop_();_nop_();DQ=0;delay1(50);DQ=1;delay1(6);presence=DQ;}delay1(45);presence=~DQ;}DQ=1;}void write_byte(uchar val){uchar i;for(i=8;i>0;i--){DQ=1;_nop_();_nop_();DQ=0;_nop_();_nop_();_nop_();_nop_();_nop_();DQ=val&0x01;delay1(6);val=val/2;}DQ=1;_nop_();}uchar read_byte(void){uchar i;uchar value=0;for(i=8;i>0;i--){DQ=1;_nop_();_nop_();value>>=1;DQ=0;_nop_();_nop_();_nop_();_nop_();DQ=1;_nop_();_nop_();_nop_();_nop_();if(DQ)value|=0x80;delay1(6);}DQ=1;return(value);}void read_temp(){reset();write_byte(0xcc);write_byte(0xbe);temp_data[0]=read_byte();temp_data[1]=read_byte();reset();write_byte(0xcc);write_byte(0x44);}void work_temp(){if(temp_data[1]>127){temp_data[1]=(256-temp_data[1]);temp_data[0]=(256-temp_data[0]);n=1; //需要前面宏定义}display[4]=temp_data[0]&0x0f; //低位的低4位display[0]=ditab[display[4]]; //小数点后的数值display[4]=((temp_data[0]&0xf0) >> 4)|((temp_data[1]&0x0f)<<4); //小数display[3]=display[4] / 100;display[1]=display[4] % 100;display[2]=display[1] / 10;display[1]=display[1] % 10;}电路:。
51单片机DS18B20温度传感器原理及实验
51单片机DS18B20温度传感器原理及实验一、引言温度传感器是一种常用的传感器器件,它的作用是将物体的温度变化转换为电信号输出,以实现温度的监测和控制。
DS18B20是一种数字温度传感器,采用数字信号输出,具有体积小、精度高、线性度好等特点,被广泛应用于各种温度控制系统中。
本文将介绍DS18B20的工作原理及实验方法。
二、DS18B20的工作原理DS18B20是一种基于一线传输协议的数字温度传感器,其工作原理如下:1.接口电路:DS18B20具有三个引脚,分别是VDD、DQ和GND。
其中,VDD是供电引脚,DQ是数据引脚,GND是地引脚。
2.传感器原理:DS18B20内部包含一个温度传感器和一个数字转换器。
温度传感器采用热敏电阻的原理,通过测量热敏电阻的电阻值来反映物体的温度变化。
数字转换器将传感器测得的电阻值转换为数字信号输出。
三、实验流程以下是使用51单片机对DS18B20温度传感器进行实验的详细流程:1.硬件准备:-将DS18B20的VDD引脚连接到单片机的VCC引脚,DQ引脚连接到单片机的任意IO引脚,GND引脚连接到单片机的GND引脚。
-确保DS18B20的供电电压和单片机的工作电压一致。
2.初始化:-在程序中定义DS18B20的DQ引脚所对应的单片机的IO引脚。
-初始化DS18B20,即发送初始化指令给DS18B20。
3.温度转换:-发送温度转换指令给DS18B20,DS18B20开始测量温度。
-等待一定的延时,确保DS18B20完成温度转换。
4.读取温度:-发送读取温度指令给DS18B20,DS18B20将温度的原始数据发送给单片机。
-单片机通过计算将原始数据转换为温度值。
-温度值可以通过串口或LCD等方式进行显示。
5.循环实验:-以上步骤需要不断重复,以便实时监测温度的变化。
四、总结DS18B20温度传感器是一种常用的数字温度传感器,具有精度高、体积小、线性度好等特点,适用于各种温度控制系统。
DS18B20温度测试程序(51单片机数码管显示)+电路图
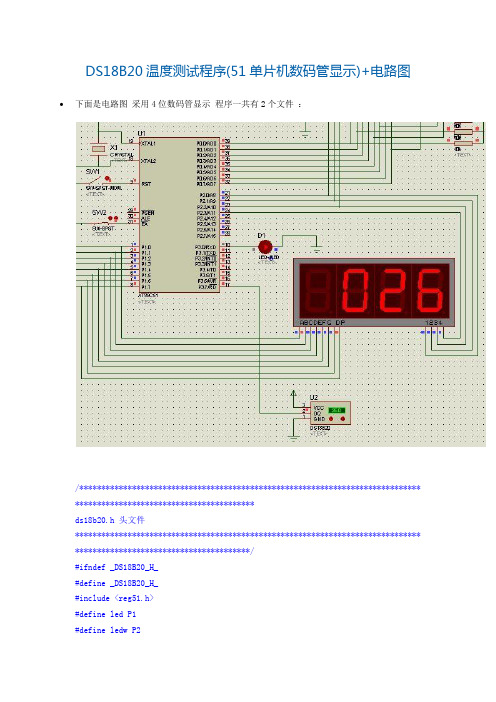
DS18B20温度测试程序(51单片机数码管显示)+电路图•下面是电路图采用4位数码管显示程序一共有2个文件:/****************************************************************************** *****************************************ds18b20.h 头文件******************************************************************************* ****************************************/#ifndef _DS18B20_H_#define _DS18B20_H_#include <reg51.h>#define led P1#define ledw P2extern unsigned char f;extern void ds18b20_reset();extern void dela(unsigned char i);extern void ds18b20_write(unsigned char dat);extern unsigned char ds18b20_read();extern unsigned char ds18b20_temp();extern unsigned char ledtab[];#endif/****************************************************************************** **************************************ds18b20.c 文件******************************************************************************* *************************************/#include"ds18b20.h"#define uchar unsigned char#define uint unsigned int#define led P1#define ledw P2uchar ledtab[]={0xc0,0xf9,0xa4, 0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};sbit dq=P3^7 ;uchar delay,f;//uchar f;void dela(uchar i) //5us t=5+i*2{while(--i);}void ds18b20_reset(){while(1){dq=1;dq=0;delay=250; //540us延时,当delay=1时延时为2us ,T=2*xwhile(--delay);dq=1;delay=25;while(--delay);while(dq==0){delay=220;while(--delay);if(dq==1)break;}delay=150;while(--delay);break;}}void ds18b20_write(uchar dat) {uchar i=0;for(i=0;i<8;i++){dq=1;dq=0;delay=3;while(--delay);dq=dat&0x01;delay=35;while(--delay);dq=1;dat=dat>>1;}}uchar ds18b20_read(){uchar i=0,m=0;for(i=0;i<8;i++){//m>>=1dq=1;dq=0;delay=4;while(--delay);dq=1;delay=4;while(--delay);if(dq==1)m|=0x01<<i;//m=m|0x80;delay=25;while(--delay);dq=1;delay=1;while(--delay);}return m;}uchar ds18b20_temp(){uchar temp=0,temph=0,templ=0,k=0; ds18b20_reset();ds18b20_write(0xcc);ds18b20_write(0x44);ds18b20_reset();ds18b20_write(0xcc);ds18b20_write(0xbe);templ=ds18b20_read();temph=ds18b20_read();if((temph&0xf80)!=0){f=1;templ=~templ;temph=~temph;k=templ+1;templ=k;if(templ>0xff){temph++;}}elsef=0;templ=templ>>4;temph=temph<<4;temp=templ|temph;return temp;}/****************************************************************************** ************************************main.c 主文件******************************************************************************* ************************************/#include<reg51.h>#include"ds18b20.h"#define uchar unsigned charvoid main(){uchar a=0,b=0,c=0,temp=0;while(1){temp=ds18b20_temp();a=temp/100;b=temp0/10;c=temp;if(f==1){led=0xbf;ledw=1;dela(5000);ledw=0;dela(600);}led=ledtab[c]; ledw=8;dela(5000); ledw=0;dela(600) ;led=ledtab[b]; ledw=4;dela(5000); ledw=0;dela(600) ;led=ledtab[a]; ledw=2;dela(5000);ledw=0;dela(600) ; }}。
基于51单片机DS18B20温度传感器的C语言程序和电路

基于51单片机DS18B20温度传感器的C 语言程序和电路DS18B2C 在外形上和三极管很像,有三只脚。
电压范围为 3.0 V 至5.5 V 无需备用电源 测量温度 位 温度转换为 12 位数字格式最大值为 750 毫秒 用户可定义的非易失性温度报警设置 应用范围包 敏感系统。
F 面是DS18B20勺子程序,本人用过完全可行的: #include<reg51.h> #include<intrins.h>#define uchar unsigned char #define uint unsigned int sbit DQ=P2A 0;void reset(); void write_byte(uchar val); uchar read_byte(void); void read_temp(); void work_temp(); uchar data temp_data[2]={0x00,0x00};uchar datadisplay[5]={0x00,0x00,0x00,0x00,0x00}; // 对于温度显示值值 uchar code ditab[16]={0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x0 数部分查表 main() {while(1) {自己添加 ;void delay1(uint t) {for(;t>0;t--); }/////// 温度控制子函数 void reset(){uchar presence=1; while(presence){ while(presence){DQ=1;_nop_();_nop_(); DQ=0;delay1(50); DQ=1; delay1(6);presence=DQ;}delay1(45); presence=~DQ; }//DS18B20//DS18B20 写命令函数 //DS18B20 读 1 字节函数// 温度读取函数 // 温度数据处理函数DQ=1;}void write_byte(uchar val){uchar i;for(i=8;i>0;i--){DQ=1;_nop_();_nop_();DQ=0;_nop_();_nop_();_nop_();_nop_();_nop_();DQ=val&0x01;delay1(6);val=val/2;}DQ=1;_nop_();}uchar read_byte(void){uchar i;uchar value=0;for(i=8;i>0;i--){DQ=1;_nop_();_nop_();value>>=1;DQ=0; _nop_();_nop_();_nop_();_nop_(); DQ=1;_nop_();_nop_();_nop_();_nop_();if(DQ)value|=0x80;delay1(6);}DQ=1;return(value);void read_temp(){reset();write_byte(0xcc);write_byte(0xbe);temp_data[0]=read_byte();temp_data[1]=read_byte();reset();write_byte(0xcc);write_byte(0x44);}void work_temp(){if(temp_data[1]>127){ temp_data[1]=(256-temp_data[1]); temp_data[0]=(256-temp_data[0]); n=1; // 需要前面宏定义}display[4]=temp_data[0]&0x0f; // 低位的低4 位display[0]=ditab[display[4]]; // 小数点后的数值display[4]=((temp_data[0]&0xf0) >> 4)|((temp_data[1]&0x0f)<<4); // 小数display[3]=display[4] / 100; display[1]=display[4] % 100;display[2]=display[1] / 10;display[1]=display[1] % 10;}电路:Bi -ij-F16欢迎您的下载,资料仅供参考!致力为企业和个人提供合同协议,策划案计划书,学习课件等等打造全网一站式需求。
单片机中使用DS18B20温度传感器C语言程序(参考3)
单片机中使用DS18B20温度传感器C语言程序(参考3)#include”reg51.h”sbit DQ =P3;//定义通信端口//延时函数void delay(unsigned int i){while(i--);}//初始化函数Init_DS18B20(void){unsigned char x=0;DQ = 1; //DQ 复位delay(8); //稍做延时DQ = 0; //单片机将DQ 拉低delay(80); //精确延时大于480usDQ = 1; //拉高总线delay(14);x=DQ; //稍做延时后如果x=0 则初始化成功x=1 则初始化失败delay(20);}//读一个字节ReadOneChar(void){unsigned char i=0;unsigned char dat = 0;for (i=8;i>0;i--){DQ = 0; // 给脉冲信号dat>>=1;DQ = 1; // 给脉冲信号if(DQ)dat|=0x80;delay(4);}return(dat);}//写一个字节WriteOneChar(unsigned char dat){unsigned char i=0;for (i=8; i>0; i--){DQ = 0;DQ = dat&0x01;delay(5);DQ = 1;dat>>=1;}}//读取温度ReadTemperature(void){unsigned char a=0;unsigned char b=0;unsigned int t=0;float tt=0;Init_DS18B20();WriteOneChar(0xCC); // 跳过读序号列号的操作WriteOneChar(0x44); // 启动温度转换Init_DS18B20(); WriteOneChar(0xCC); //跳过读序号列号的操作WriteOneChar(0xBE); //读取温度寄存器等(共可读9 个寄存器)前两个就是温度a=ReadOneChar();b=ReadOneChar();t=b;t//分别从0-9 的数码编码,注意此编码只适合QQ 单片机实验板,其他电路板上的编码请参考上面的算法自行计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于51单片机DS18B20温度传感器的C语言程序和电路
DS18B20在外形上和三极管很像,有三只脚。
电压范围为3.0 V至5.5 V 无需备用电源测量温度位温度转换为12位数字格式最大值为750毫秒用户可定义的非易失性温度报警设置应用范围包敏感系统。
下面是DS18B20的子程序,本人用过完全可行的:
#include<reg51.h>
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
sbit DQ=P2^0;
void reset(); //DS18B20 void write_byte(uchar val); //DS18B20写命令函数
uchar read_byte(void); //DS18B20读1字节函数
void read_temp(); //温度读取函数
void work_temp(); //温度数据处理函数
uchar data temp_data[2]={0x00,0x00};
uchar data display[5]={0x00,0x00,0x00,0x00,0x00}; //对于温度显示值值
uchar code ditab[16]={0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,0x05,0x06,0x06,0x07,0x0数部分查表
main()
{
while(1)
{
自己添加;
}
}
void delay1(uint t)
{
for(;t>0;t--);
}
///////温度控制子函数
void reset()
{
uchar presence=1;
while(presence)
{
while(presence)
{
DQ=1;_nop_();_nop_();
DQ=0;
delay1(50);
DQ=1;
delay1(6);
presence=DQ;
}
delay1(45);
presence=~DQ;
}
DQ=1;
}
void write_byte(uchar val)
{
uchar i;
for(i=8;i>0;i--)
{
DQ=1;_nop_();_nop_();
DQ=0;_nop_();_nop_();_nop_();_nop_();_nop_();
DQ=val&0x01;
delay1(6);
val=val/2;
}
DQ=1;
_nop_();
}
uchar read_byte(void)
{
uchar i;
uchar value=0;
for(i=8;i>0;i--)
{
DQ=1;_nop_();_nop_();
value>>=1;
DQ=0;
_nop_();_nop_();_nop_();_nop_();
DQ=1;_nop_();_nop_();_nop_();_nop_();
if(DQ)value|=0x80;
delay1(6);
}
DQ=1;
return(value);
}
void read_temp()
{
reset();
write_byte(0xcc);
write_byte(0xbe);
temp_data[0]=read_byte();
temp_data[1]=read_byte();
reset();
write_byte(0xcc);
write_byte(0x44);
}
void work_temp()
{
if(temp_data[1]>127)
{
temp_data[1]=(256-temp_data[1]);
temp_data[0]=(256-temp_data[0]);
n=1; //需要前面宏定义
}
display[4]=temp_data[0]&0x0f; //低位的低4位
display[0]=ditab[display[4]]; //小数点后的数值
display[4]=((temp_data[0]&0xf0) >> 4)|((temp_data[1]&0x0f)<<4); //小数display[3]=display[4] / 100;
display[1]=display[4] % 100;
display[2]=display[1] / 10;
display[1]=display[1] % 10;
}
电路:。