linux内核部件分析-设备驱动模型之driver
Linux系统关系族谱图:应用程序、内核、驱动程序、硬件详解
Linux系统关系族谱图:应用程序、内核、驱动程序、硬件详解目前,Linux软件工程师大致可分为两个层次:01Linux应用软件工程师(ApplicaTIon Software Engineer):主要利用C库函数和Linux API 进行应用软件的编写;从事这方面的开发工作,主要需要学习:符合linux posix标准的API函数及系统调用,linux 的多任务编程技巧:多进程、多线程、进程间通信、多任务之间的同步互斥等,嵌入式数据库的学习,UI编程:QT、miniGUI等。
02Linux固件工程师(Firmware Engineer):主要进行Bootloader、Linux的移植及Linux设备驱动程序的设计工作。
一般而言,固件工程师的要求要高于应用软件工程师的层次,而其中的Linux设备驱动编程又是Linux程序设计中比较复杂的部分,究其原因,主要包括如下几个方面:1 )设备驱动属于Linux内核的部分,编写Linux设备驱动需要有一定的Linux操作系统内核基础;需要了解部分linux内核的工作机制与系统组成2)编写Linux设备驱动需要对硬件的原理有相当的了解,大多数情况下我们是针对一个特定的嵌入式硬件平台编写驱动的,例如:针对特定的主机平台:可能是三星的2410、2440,也可能是atmel的,或者飞思卡尔的等等3 )Linux设备驱动中广泛涉及到多进程并发的同步、互斥等控制,容易出现bug;因为linux本身是一个多任务的工作环境,不可避免的会出现在同一时刻对同一设备发生并发操作4 )由于属于内核的一部分,Linux设备驱动的调试也相当复杂。
linux设备驱动没有一个很好的IDE环境进行单步、变量查看等调试辅助工具;linux驱动跟linux内核工作在同一层次,一旦发生问题,很容易造成内核的整体崩溃。
在任何一个计算机系统中,大至服务器、PC机、小至手机、mp3/mp4播放器,无论是复杂的大型服务器系统还是一个简单的流水灯单片机系统,都离不开驱动程序的身影,没有硬件的软件是空中楼阁,没有软件的硬件只是一堆废铁,硬件是底层的基础,是所有软件。
Linuxlinux硬件驱动架构
Linuxlinux硬件驱动架构linux硬件驱动(usb)??模块:模块用来装载到内核中,用来实现设备驱动程序。
??linux对于一个硬件的驱动,采用两种方式读取:??1.直接加载到内核代码中,启动内核时就会驱动此硬件设备??2.以模块方式读取,编程分解成一个.o的文件,当应用程序须要时读取入内核空间运转??so(通常说的硬件驱动其实就是一个硬件驱动模块及.o文件)??设备文件(设备节点):??设备文件(设备节点)指定(主设备号)&&(次设备号)??主设备号:对应着确认的驱动程序。
??(声明设备所使用的驱动程序,设备号相当于硬件驱动程序的一个标识)??次设备号:区分相同属性,相同采用方法,相同边线,相同操作方式??设备号从/proc/drives中获取,so先有驱动程序在内核中,才有设备节点在目录中。
??scsi(并口):通常采用的的usb存储设备,就是演示scsi硬盘而展开设计的。
??linux硬件驱动架构:??.o驱动模块文件--(如果须要采用这个驱动程序,首先必须读取运转它)-->insmod*.o--(驱动程序根据字符设备类型或块设备类型(鼠标属字符设备,硬盘属块设备))向系统登记注册-->登记注册顺利之后系统回到一个主设备号---(根据主设备号建立一个置放在/dev目录下的设备文件)-->(mknod用以建立设备文件须要使用设备号这个参数)----->我们出访硬件时,就可以对设备文件通过open,read,write等命令展开,而驱动就可以发送至适当的read,write操作方式而根据自己模块中的适当函数展开。
??上层调用api.o驱动drive.o??与模块有关的一些东西:??1./lib/modules/2.6.**目录,下面是针对当前内核版本的模块。
??2.查阅模块的倚赖关系与否恰当(depmod设置)??3.加载模块而不需要知道具体的模块位置(modprobe)??4.文件/etc/modules.conf文件,当kernel须要时轻易回去该文件中搜寻别称读取??modprobe用于加载系统已经通过depmod登记过的模块,insmod一般是针对具体的.o进行文件的加载。
linux的bus、device、driver介绍

linux的bus、device、driver介绍 linux 通过device和driver分别管理系统中的设备和驱动,⽤bus将设备和驱动关联起来,bus可以看成是设备和驱动的媒介,可以匹配设备和驱动。
这样设备和驱动可以独⽴加载,互不影响。
sysfs是⼀个基于内存的⽂件系统,它的作⽤是将内核信息以⽂件的⽅式提供给⽤户程序使⽤。
我们都知道设备和对应的驱动都是由内核管理的,这些对于⽤户空间是不可见的。
现在通过sysfs,可以在⽤户空间直观的了解设备驱动的层次结构。
⼀、bus注册过程bus_type结构体代表⼀条总线,如下所⽰:struct bus_type {const char *name; //名称const char *dev_name;struct device *dev_root;struct device_attribute *dev_attrs; /* use dev_groups instead */const struct attribute_group **bus_groups;const struct attribute_group **dev_groups;const struct attribute_group **drv_groups;int (*match)(struct device *dev, struct device_driver *drv); //device和driver的匹配函数int (*uevent)(struct device *dev, struct kobj_uevent_env *env);int (*probe)(struct device *dev);int (*remove)(struct device *dev);void (*shutdown)(struct device *dev);int (*online)(struct device *dev);int (*offline)(struct device *dev);int (*suspend)(struct device *dev, pm_message_t state);int (*resume)(struct device *dev);const struct dev_pm_ops *pm;const struct iommu_ops *iommu_ops;struct subsys_private *p; struct lock_class_key lock_key;};struct subsys_private {struct kset subsys; //对应/sys/bus⽬录struct kset *devices_kset; //对应/sys/bus/devices⽬录struct list_head interfaces;struct mutex mutex;struct kset *drivers_kset; //对应/sys/bus/drivers⽬录struct klist klist_devices; //该bus下的所有devicestruct klist klist_drivers; //该bus下的所有driverstruct blocking_notifier_head bus_notifier;unsigned int drivers_autoprobe:1;struct bus_type *bus;struct kset glue_dirs;struct class *class;};向系统添加⼀条bus_type总线时,改总线会⾃动添加到/sys/bus⽬录下,bus⽬录是系统⾃动创建的,这个bus⽬录为static struct kset *bus_kset,定义在kernel/drivers/base/bus.c中。
linux内核部件分析-设备驱动模型之driver
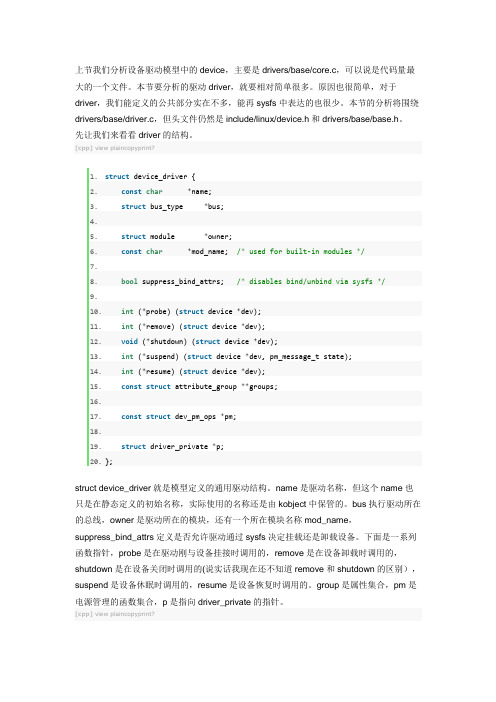
上节我们分析设备驱动模型中的device,主要是drivers/base/core.c,可以说是代码量最大的一个文件。
本节要分析的驱动driver,就要相对简单很多。
原因也很简单,对于driver,我们能定义的公共部分实在不多,能再sysfs中表达的也很少。
本节的分析将围绕drivers/base/driver.c,但头文件仍然是include/linux/device.h和drivers/base/base.h。
先让我们来看看driver的结构。
[cpp]view plaincopyprint?1.struct device_driver {2.const char *name;3.struct bus_type *bus;4.5.struct module *owner;6.const char *mod_name; /* used for built-in modules */7.8.bool suppress_bind_attrs; /* disables bind/unbind via sysfs */9.10.int (*probe) (struct device *dev);11.int (*remove) (struct device *dev);12.void (*shutdown) (struct device *dev);13.int (*suspend) (struct device *dev, pm_message_t state);14.int (*resume) (struct device *dev);15.const struct attribute_group **groups;16.17.const struct dev_pm_ops *pm;18.19.struct driver_private *p;20.};struct device_driver就是模型定义的通用驱动结构。
Linux设备驱动程序原理及框架-内核模块入门篇
Linux设备驱动程序原理及框架-内核模块入门篇内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块内核模块介绍Linux采用的是整体式的内核结构,这种结构采用的是整体式的内核结构,采用的是整体式的内核结构的内核一般不能动态的增加新的功能。
为此,的内核一般不能动态的增加新的功能。
为此,Linux提供了一种全新的机制,叫(可安装) 提供了一种全新的机制,可安装) 提供了一种全新的机制模块” )。
利用这个机制“模块”(module)。
利用这个机制,可以)。
利用这个机制,根据需要,根据需要,在不必对内核重新编译链接的条件将可安装模块动态的插入运行中的内核,下,将可安装模块动态的插入运行中的内核,成为内核的一个有机组成部分;成为内核的一个有机组成部分;或者从内核移走已经安装的模块。
正是这种机制,走已经安装的模块。
正是这种机制,使得内核的内存映像保持最小,的内存映像保持最小,但却具有很大的灵活性和可扩充性。
和可扩充性。
内核模块内核模块介绍可安装模块是可以在系统运行时动态地安装和卸载的内核软件。
严格来说,卸载的内核软件。
严格来说,这种软件的作用并不限于设备驱动,并不限于设备驱动,例如有些文件系统就是以可安装模块的形式实现的。
但是,另一方面,可安装模块的形式实现的。
但是,另一方面,它主要用来实现设备驱动程序或者与设备驱动密切相关的部分(如文件系统等)。
密切相关的部分(如文件系统等)。
课程内容内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块应用层加载模块操作过程内核引导的过程中,会识别出所有已经安装的硬件设备,内核引导的过程中,会识别出所有已经安装的硬件设备,并且创建好该系统中的硬件设备的列表树:文件系统。
且创建好该系统中的硬件设备的列表树:/sys 文件系统。
(udev 服务就是通过读取该文件系统内容来创建必要的设备文件的。
)。
linux驱动模型
我们将详细的介绍Linux的设备驱动模型。
Linux设备驱动模型是一个相当复杂的系统,对于初学者来说真有些无从入手。
而且更加困难的是,随着新的Linux Kernel的release,Linux 的设备驱动模型总会有或大或小的变化,我们将尽量展现Linux Kernel 的这种变化。
早期的Linux内核(版本2.4之前)并没有实现一个统一的设备模型,设备节点的创建一般是mknod命令手动创建或利用devfs文件系统创建。
早期的Linux发行版一般会采用手动创建的方式预先把通常用到的节点都创建出来,而嵌入式系统则会采用devfs的方式。
起初Linux 2.6 内核还支持devfs,但从2.6.18开始,内核完全移除了devfs系统而采用的udev的方式动态的创建设备节点。
因此,新的Linux发行版都采用udev的方式管理设备节点文件。
Linux2.6设备驱动模型的基本元素是Class、Bus、Device、Driver,下面我们分别介绍各个部分。
Class 和Class Device驱动模型最基本的概念是设备及其类别,Linux中使用struct class 和struct class_device来管理不同类别的设备。
由于设备驱动模型是一个复杂的系统,我们还是从一个简单的例子开始介绍,然后在逐步展开。
其实实现设备节点的动态创建是一个很简单的事情,并不需要太多的代码。
我们修改我们的驱动初始化函数如下:#include <linux/device.h>#define DEVNAME "hello"static dev_t dev;static struct class *hello_c lass;static struct cdev *hello_cdev;static int __init hello_init(void){int error;error = alloc_chrdev_region(&dev, 0, 2, "hello");if (error){printk("hello: alloc_chardev_region failed! ");goto out;}hello_cdev = cdev_alloc();if (hello_cdev == NULL){printk("hello: alloc cdev failed! ");error = -ENOMEM;goto out_chrdev;}hello_cdev->ops = &hello_fops;hello_cdev->owner = THIS_MODULE;error = cdev_add(hello_cdev, dev, 1);if (error){printk("hello: cdev_add failed! ");goto out_cdev;}hello_class = class_create(THIS_MODULE, DEVNAME);if (IS_ERR(hello_class)){error = PTR_ERR(hello_class);goto out_chrdev;}class_device_create(hello_class, NULL, dev, NULL, DEVNAME);memset (hello_buf, 0, sizeof(hello_buf));memcpy(hello_buf, DEFAULT_MSG, sizeof(DEFAULT_MSG));printk("hello: Hello World! ");return 0;out_cdev:cdev_del(hello_cdev);out_chrdev:unregister_chrdev_region(hello_cdev->dev, 2);out:return error;}static void __exit hello_exit(void){class_device_destroy(hello_class, dev);class_destroy(hello_class);unregister_chrdev_region(hello_cdev->dev, 2);cdev_del(hello_cdev);printk("hello: Goodbye World ");}重新编译这个驱动程序,当加载这个驱动到内核中时,系统(一般是hotplug和udev系统)就会自动的创建我们指定的设备名字:/dev/hello,同时,你也可以发现在sysfs系统中添加了新的文件:/sys/class/hello/hello/。
Linuxkernel驱动相关抽象概念及其实现之“bus,device,driver”

Linuxkernel驱动相关抽象概念及其实现之“bus,device,driver”bus,device,driver三个很重要的概念贯穿Linux内核驱动架构,特转载⼀篇博⽂:内核的开发者将总线,设备,驱动这三者⽤软件思想抽象了出来,巧妙的建⽴了其间的关系,使之更形象化。
结合前⾯所学的知识,总的来说其三者间的关系为bus有两条链表,分别⽤于挂接设备和驱动,指定了其⾃⾝bus的device或者driver最后都会分别连接到对应bus的这两条链表上,⽽总线⼜有其始端,为bus_kset,⼀个driver可以对应于⼏个设备,因此driver同样有其设备链表,⽤于挂接可以操作的设备,其⾃⾝也有bus挂接点,⽤于将⾃⾝挂接到对应bus(每个driver只属于⼀条总线),⽽对于device,⼀个设备只属于⼀条总线,只能有⼀个driver与其对应,因此对于device,都是单⼀的,⼀个driver挂接点,⼀个bus挂接点,device与bus相同的是都有始端,device为devices_kset,因此device的注册同时会出现在对应的bus⽬录和device总⽬录下。
好了,下⾯就以源码为例分别分析⼀下bus,device,driver的注册过程。
⼀、bus的注册bus的注册⽐较简单,⾸先来看⼀下bus的结构:1struct bus_type {2const char *name; //名字3struct bus_attribute *bus_attrs; //bus属性集4struct device_attribute *dev_attrs; //device属性集5struct driver_attribute *drv_attrs; //driver属性集6int (*match)(struct device *dev, struct device_driver *drv);7int (*uevent)(struct device *dev, struct kobj_uevent_env *env);8int (*probe)(struct device *dev);9int (*remove)(struct device *dev);10void (*shutdown)(struct device *dev);11int (*suspend)(struct device *dev, pm_message_t state);12int (*resume)(struct device *dev);13const struct dev_pm_ops *pm;14struct bus_type_private *p; //bus的私有成员15 };16//其中重点看⼀下私有成员结构体:17struct bus_type_private {18struct kset subsys; //bus内嵌的kset,代表其⾃⾝19struct kset *drivers_kset;20struct kset *devices_kset;21struct klist klist_devices; //包含devices链表及其操作函数22struct klist klist_drivers; //driver链表及其操作函数23struct blocking_notifier_head bus_notifier;24 unsigned int drivers_autoprobe:1; //匹配成功⾃动初始化标志25struct bus_type *bus;26 };⽆论是bus,driver,还是device其本⾝特征都放在私有成员⾥,其注册时,都会申请并填充这个结构体,下⾯具体分析⼀下bus的注册流程,从bus_register开始:1int bus_register(struct bus_type *bus)2 {3int retval;4struct bus_type_private *priv;5 priv = kzalloc(sizeof(struct bus_type_private), GFP_KERNEL); //进⼊时bus_type->bus_type_private为NULL6if (!priv) //该函数主要是对其的设置7return -ENOMEM;8 priv->bus = bus; //私有成员的bus回指该bus9 bus->p = priv; //初始化bus->p,即其私有属性10 BLOCKING_INIT_NOTIFIER_HEAD(&priv->bus_notifier);11 retval = kobject_set_name(&priv->subsys.kobj, "%s", bus->name); //设置该bus的名字,bus是kset的封装12if (retval)13goto out;14//bus_kset即为所有bus的总起始端点15//围绕bus内嵌的kset初始化,和kset的初始化时围绕16 priv->subsys.kobj.kset = bus_kset; //kobj相似,没有parent时,就会⽤kset的kobj,此处即是17 priv->subsys.kobj.ktype = &bus_ktype; //属性操作级别统⼀为bus_ktype18 priv->drivers_autoprobe = 1; //设置该标志,当有driver注册时,会⾃动匹配devices19//上的设备并⽤probe初始化,20//当有device注册时也同样找到 driver并会初始化21 retval = kset_register(&priv->subsys); //注册kset,创建⽬录结构,以及层次关系22if (retval)23goto out;24 retval = bus_create_file(bus, &bus_attr_uevent); //当前bus⽬录下⽣成bus_attr_uevent属性⽂件25if (retval)26goto bus_uevent_fail;27 priv->devices_kset = kset_create_and_add("devices", NULL, //初始化bus⽬录下的devices⽬录,⾥⾯级联了该bus下设备,28 &priv->subsys.kobj); //仍然以kset为原型29if (!priv->devices_kset) {30 retval = -ENOMEM;31goto bus_devices_fail;32 }33 priv->drivers_kset = kset_create_and_add("drivers", NULL, //初始化bus⽬录下的drivers⽬录,⾥⾯级联了该bus下设备的driver34 &priv->subsys.kobj);35if (!priv->drivers_kset) {36 retval = -ENOMEM;37goto bus_drivers_fail;38 }39 klist_init(&priv->klist_devices, klist_devices_get, klist_devices_put); //初始化klist_devices⾥的操作函数成员40 klist_init(&priv->klist_drivers, NULL, NULL); //klist_drivers⾥的操作函数置空41 retval = add_probe_files(bus); //增加bus_attr_drivers_probe和bus_attr_drivers_autoprobe42if (retval) //属性⽂件43goto bus_probe_files_fail;44 retval = bus_add_attrs(bus); //增加默认的属性⽂件45if (retval)46goto bus_attrs_fail;47 pr_debug("bus: '%s': registered/n", bus->name);48return0;49 bus_attrs_fail: //以下为错误处理50 remove_probe_files(bus);51 bus_probe_files_fail:52 kset_unregister(bus->p->drivers_kset);53 bus_drivers_fail:54 kset_unregister(bus->p->devices_kset);55 bus_devices_fail:56 bus_remove_file(bus, &bus_attr_uevent);57 bus_uevent_fail:58 kset_unregister(&bus->p->subsys);59out:60 kfree(bus->p);61 bus->p = NULL;62return retval;63 }由此可见,bus⼜是kset的封装,bus_register主要完成了其私有成员bus_type_private的初始化,并初始化了其下的两个⽬录devices和drivers,及其属性⽂件,bus有个⾃⼰的根⽬录也就是bus有个起始端点,是bus_kset,经过此番的注册,bus⽬录下将会出现我们注册的bus,并且其下会有device和driver两个⼦⽬录,代表它下⾯的driver和device链表。
Linux命令行中的硬件信息查看和驱动管理
Linux命令行中的硬件信息查看和驱动管理在Linux命令行中,我们可以通过一些命令来查看硬件信息和管理驱动,这对于系统维护和故障排除非常重要。
本文将介绍几个常用的命令及其用法,帮助您快速获取硬件信息和管理驱动。
1. 查看硬件信息1.1 lshw命令lshw(或者lswhw)是一个用于查看硬件信息的命令,可以列出系统中所有硬件的详细信息,包括处理器、内存、硬盘、网卡等。
使用示例:```$ sudo lshw```运行以上命令后,您将看到完整的硬件信息列表,可以通过滚动查看或者使用管道和grep命令过滤感兴趣的部分。
1.2 lspci命令lspci命令用于列出系统中所有PCI设备的信息,包括显卡、网卡、声卡等。
使用示例:```$ lspci```该命令会输出PCI设备的详细信息,可以通过管道和grep进行过滤。
1.3 lsusb命令lsusb命令用于列出系统中所有USB设备的信息。
使用示例:```$ lsusb```该命令会输出USB设备的详细信息,可以通过管道和grep进行过滤。
2. 管理驱动2.1 modprobe命令modprobe命令用于加载和卸载Linux内核模块,包括驱动程序。
使用示例:```$ sudo modprobe <module_name> // 加载模块$ sudo modprobe -r <module_name> // 卸载模块```其中,`<module_name>`为要加载或卸载的模块名称。
2.2 lsmod命令lsmod命令用于列出当前已加载的内核模块。
使用示例:```$ lsmod```该命令会输出已加载模块的列表,包括模块名称、使用次数等信息。
2.3 rmmod命令rmmod命令用于卸载已加载的内核模块。
使用示例:```$ sudo rmmod <module_name>```其中,`<module_name>`为要卸载的模块名称。
Linux设备驱动模型
简介作者:hjlin内核版本:2.6.29设备驱动模型框架是linux驱动编程的基础。
它通过kobject,kset,ktype等底层数据结构将bus_type, device, device_driver 等高层数据结构组织起来,形成一个层次、分类清晰的驱动模型。
优点如下:1.代码重用。
将对象抽象为总线、驱动、设备三种,各司其职。
同一总线的多个驱动使用相同的总线对象。
同一驱动可以关联驱动多个设备。
2.通过sysfs文件系统,清晰了展示内核驱动模型中的层次关系。
同时sysfs文件系统还提供了方便的同用户控件交互的接口。
框架数据结构KobjectKobject是代表驱动模型中的一个对象。
总线、驱动、设备都继承了它。
(在结构体中包含kobject)。
每个kobject在sysfs中表现为一个目录。
每个kobject都有一个parent kobject和所属的kset。
Kset就是kobject所属的kset,通过kset 的链表可以找到所有属于它的kobject。
这些kobject进行uevent操作时,都会调用所属的kset 的uevent_ops方法。
父kobj,用于表示kobject之间或者kobject和kset,kset之间的在sysfs 中的目录结构关系。
如果父kobj不存在,并且所属的kset存在的话,则父kobj就是设置为所属的kset的内嵌kobj。
因此,注册设备、驱动或者总线的时候如果不指定parent kobj的话,父kobj则会设置为所属的kset的kobj。
(todo:最好画图表示关系)Kest通过kset可以将kobject组织成一颗层次树。
kobj_typebus_type代表一个总线。
对应/sys/bus下的一个目录。
管理相应总线下的所有驱动和设备。
struct bus_type {const char *name; //总线名称struct bus_attribute *bus_attrs; //该总线目录下的属性文件以及相应的访问方法struct device_attribute *dev_attrs; //该总线设备子目录下的属性文件以及相应的访问方法struct driver_attribute *drv_attrs; //该总线驱动子目录下的属性文件以及相应的访问方法int (*match)(struct device *dev, struct device_driver *drv); //驱动模型进行驱动和设备的匹配时调用int (*uevent)(struct device *dev, struct kobj_uevent_env *env); //uevent方法int (*probe)(struct device *dev); //match成功之后会调用。
Linux MTD及NAND Driver介绍_吴准
1、pxa3xx_nand_cmdfunc发送命令、发送数据、读写数据。 作用: 对NAND FLASH 控制器的相关寄存器操作, 填充命令,如读,编程,擦除,还有数据。 1)重置timing。 2)写控制命令池。 3)清命令缓冲区。 4)设置地址及数据及传输方式。 5)初始化一个完成量。 6)中断到,运行ND_RUN写寄存器。
MTD原始设备
Flash硬件驱动
2.1 Linux MTD 架构
1、设备节点:/dev下MTD字符设备节点(主设备号为90) 2、MTD设备层:分为MTD字符设备层(mtdchar.c)和MTD块设 备层(Mtdblock.c),完成flash的基本操作。 3、MTD原始设备层:MTD原始设备的通用代码(mtdcore.c) ,(mtdpart.c).其中mtdcore.c中定义了描述mtd设备的 核心结构mtdinfo. 4、FLASH硬件驱动层: /mtd/nand目录,实现了对flash的读写擦校验等动作。
FLASH驱动层架构 三、T920之NAND FLASH驱动层架构 T920之
驱动实现层:pxa3xx_nand.c n80.c 1)通过platform注册pxa3xx_nand设备及驱动。 2)在probe中申请资源及实现chip ops操作函数。 3)添加mtd设备到MTD。
FLASH驱动层架构 三、T920之NAND FLASH驱动层架构 T920之
ops调用底层驱动 2.4 MTD File ops调用底层驱动
文件系统->调用MTD设备层: Mtdchar.c (字符设备,如NAND FLASH) init_mtdchar(void)中调用了 register_chrdev(MTD_CHAR_MAJOR, "mtd", &mtd_fops); 最终通过cdev->ops = fops;将文件操作赋给了cdev。 其中mtd_fops中实现了mtd设备的读写及ioctl.
driver使用方法
driver使用方法
驱动程序 (Driver):
如果你指的是硬件设备的驱动程序,通常情况下,你需要下载适用于你的操作系统的最新驱动程序。
然后,你可以按照以下步骤安装它们:
下载驱动程序文件,通常是一个安装程序 .exe 或 .msi)。
运行安装程序,按照提示完成安装过程。
重新启动计算机,使驱动程序生效。
软件中的"Driver":
如果你在谈论某个软件中的"Driver",可能是指连接到该软件的插件、模块或外部组件。
在这种情况下,你需要查阅相关软件的文档,以了解如何配置和使用这些"Driver"。
驾驶员 (Driver):
如果你是在谈论汽车或机动车辆的"Driver",那么使用方法将涉及驾驶技能、道路规则等。
在这种情况下,你需要获得适当的驾驶执照,学习并遵守交通规则。
总线设备驱动
linux内核学习---总线,设备,驱动Linux 设备模型中三个很重要的概念就是总线,设备,驱动.即 bus,device,driver,而实际上内核中也定义了这么一些数据结构,他们是 struct bus_type,struct device,struct device_driver,这三个重要的数据结构都来自一个地方,include/linux/device.h.我们知道总线有很多种,pci总线,scsi 总线,usb 总线,所以我们会看到Linux 内核代码中出现pci_bus_type,scsi_bus_type,usb_bus_type,他们都是 struct bus_type 类型的变量.而struct bus_type 结构中两个非常重要的成员就是 struct kset drivers 和 struct kset devices。
kset 和另一个叫做 kobject 正是 Linux Kernel 2.6 中设备模型的基本元素。
这里我们只需要知道,drivers 和 devices 的存在,让struct bus_type 与两个链表联系了起来,一个是devices 的链表,一个是 drivers 的链表,也就是说,知道一条总线所对应的数据结构,就可以找到这条总线所关联的设备有哪些,又有哪些支持这类设备的驱动程序.而要实现这些,就要求每次出现一个设备就要向总线汇报,或者说注册,每次出现一个驱动,也要向总线汇报,或者说注册.比如系统初始化的时候,会扫描连接了哪些设备,并为每一个设备建立起一个 struct device 的变量,每一次有一个驱动程序,就要准备一个 struct device_driver 结构的变量.把这些变量统统加入相应的链表,device 插入 devices 链表,driver 插入 drivers 链表. 这样通过总线就能找到每一个设备,每一个驱动。
struct bus_type 中为 devices 和 drivers 准备了两个链表,而代表 device 的结构体 struct device 中又有两个成员,struct bus_type *bus 和 struct device_driver *driver。
Linux ——Driver

第一章驱动程序基本框架星期二, 06/08/2010 - 00:21— william前言不管是Windows还是Linux,驱动程序都扮演着重要的角色。
应用程序只能通过驱动程序才能同硬件设备或系统内核通讯。
Linux内核对不同的系统定义了标准的接口(API),应用程序就是通过这些标准的接口来操作内核和硬件。
驱动可以被编译的内核中(build-in),也可以做为内核模块(Module)存在于内核的外面,需要的时候动态插入到内核中运行。
就像你学习操作系统概念时所了解的那样,Linux内核也分为几个大的部分:进程管理、内存管理、文件系统、设备控制、网络系统等,参考图1-1。
图1-1 Linux系统(来源:O‟Reilly Media, LDD3)这里就不对Linux系统内核的各个部分做过多的介绍了,在后面的学习中你就会逐渐地对这些概念有个更深入的了解。
其实Linux内核的精髓远不止这些,对于一个Linux内核的爱好者或开发者来说,最好详细的浏览内核源代码,订阅Linux内核相关的邮件列表,或是登陆Linux开发社区。
更多的信息,请登陆Linux内核官方网站:一个简单的驱动下面我们来编写第一个驱动程序,它很简单,在运行时会输出…Hello World‟消息。
// hello.c#include <linux/init.h>#include <linux/module.h>#include <linux/kernel.h>static int __init hello_init(void){printk(KERN_ALERT "Hello World!\n");return 0;}static void __exit hello_exit(void){printk(KERN_ALERT "Goodbye World!\n");}module_init(hello_init);module_exit(hello_exit);MODULE_LICENSE("GPL");这就是一个简单的驱动程序,它什么也没做,仅仅是输出一些信息,不过对于我们来说这已经足够了。
linux driver中断处理实例-概述说明以及解释
linux driver中断处理实例-概述说明以及解释1.引言概述部分的内容可以如下所示:1.1 概述Linux驱动程序是操作系统内核的核心组成部分之一。
它负责与硬件设备进行交互,并提供给用户空间的应用程序访问硬件的接口。
中断处理是Linux驱动程序中非常重要的组成部分,它允许硬件设备在需要注意的情况下主动向CPU发送信号。
这些信号需要被驱动程序捕获并处理,以执行相应的操作。
中断处理的高效与否直接影响着系统的整体性能和响应能力。
本文将围绕Linux驱动程序中的中断处理展开讨论。
我们将首先介绍Linux驱动程序的基本概念,包括其作用、类型和加载方式等。
然后我们将详细探讨中断处理的基本概念,包括中断的定义、传统中断与异常中断的区别等。
接下来,我们将深入分析在Linux驱动程序中实现中断处理的关键技术和策略,包括中断处理程序的注册、上下文切换、共享中断、中断处理的顺序、中断处理线程和底半部等。
通过对Linux驱动程序中断处理实例的分析,我们将展示如何正确地设计和实现中断处理程序,以提高系统的可靠性、稳定性和性能。
同时,我们也将深入思考中断处理的重要性,并展望未来中断处理的发展方向。
在本系列文章中,我们希望为读者提供全面的Linux驱动程序中断处理知识,并为相关领域的开发者和研究者提供有价值的参考和指导。
1.2 文章结构文章结构部分的内容可以包括以下内容:文章结构部分旨在介绍本文的整体结构,让读者对文章的脉络有一个大致的了解。
本文主要围绕着Linux驱动程序中的中断处理展开,共分为引言、正文和结论三个部分。
引言部分首先对本文的背景和主题进行一个概述,介绍了本文主要讨论的内容是Linux驱动程序中的中断处理实例。
接着介绍了文章的结构,包括引言、正文和结论三个部分。
通过明确的结构,读者可以清楚地了解到本文的整体框架。
正文部分是本文的主体部分,也是最核心的部分。
在正文中,我们将逐步展开对Linux驱动程序中的中断处理的讲解。
Linux设备驱动模型框架的分类研究
Linux设备驱动模型框架的分类研究宁玉玲;陈琼;马扬龙【摘要】在嵌入式产品开发中,驱动程序的编写占很大比例.在简要概括了设备驱动程序原理和一些重要相关知识的前提下,对3种常见的Linux设备驱动模型做了详细分析.旨在从层次结构的角度对Linux设备驱动程序的编写方法进行总结,从中发现Linux设备驱动程序的编写规律,从而解决设备驱动程序开发难且不易掌握的问题.在此用WTD实例表明,层次结构的思想可以满足常见的设备驱动编写需求.%The compiling of driver occupys a large proportion in embedded product development. The principle of the de-vice drivers and some important knowledge are described briefly in this paper. Three common models of Linux driver are ana-lyzed in detail. Linux device driver preparation methods are summarized from the view point of the hierarchy. The compiling rule of linux device driver was discovered from the summarization of the compiling methods. The problems hard to write device driver and master it were solved by the method. The WTD instance in the article shows that the idea of hierarchical structure can meet the demands of common device driver compiling.【期刊名称】《现代电子技术》【年(卷),期】2013(036)004【总页数】4页(P5-8)【关键词】Linux;驱动模型;设备驱动;层次结构【作者】宁玉玲;陈琼;马扬龙【作者单位】南昌航空大学信息工程学院,江西南昌330063;南昌航空大学信息工程学院,江西南昌330063;南昌航空大学信息工程学院,江西南昌330063【正文语种】中文【中图分类】TN964-34社会的发展总是伴随着科学技术的革新。
总线驱动bus_driver

priv->drivers_kset = kset_create_and_add("drivers", NULL,&priv->subsys.kobj);
初始化总线上的设备链表,并且把引用和释放该链表上的设备分别交由klist_devices_get和klist_devices_put函数负责
......
struct bus_type *bus; /* type of bus device is on */
struct device_driver *driver; /* which driver has allocated this
device */
void *driver_data; /* data private to the driver */
一、总线(bus)
总线是CPU与外设之间的通道。在设备模型中,所有的设备都通过总线相连。用bus_type结构表示总线( <linux/device.h> ):
struct bus_type {
const char *name;//总线名,显示在/sysfs/bus/目录下,如/sysfs/bus/i2c
该函数迭代了总线上的每个设备,将相关的device结构传递给函数fn,同时传递data值。如果start是NULL,将从总线上ห้องสมุดไป่ตู้第一个设备开始迭代;否则将从start后的第一个设备开始迭代。总线上的所有设备均挂接在bus->p->klist_devices链表。
int bus_for_each_drv(struct bus_type *bus, struct device_driver *start,
精选嵌入式LINUX设备驱动程序课件

设备的控制操作
对设备的控制操作可通过文件操作数据结构中的ioctl()函数来完成。控制操作与具体的设备有密切关系,需要根据设备实际情况进行具体分析。
设备的轮询和中断处理
轮询方式对于不支持中断的硬件设备,读写时需要轮流查询设备的状态,以便决定随后的数据操作。如果轮询处理方式的驱动程序被链接到内核,则意味着查询过程中,内核一直处于闲置状态。解决办法是使用内核定时器,进行定期查询。
主设备号与次设备号
次设备号用于标识使用同一设备驱动程序的不同硬件,并仅由设备驱动程序解释 当应用程序操作某个设备文件时,Linux内核根据其主设备号调用相应的驱动程序,并从用户态进入内核态驱动程序判断次设备号,并完成相应的硬件操作。
用户空间和内核空间
Linux运行在2种模式下内核模式用户模式内核模式对应内核空间,而用户模式对应用户空间。驱动程序作为内核的一部分,它对应内核空间,应用程序不能直接访问其数据,
帧缓冲设备驱动程序
LCD分类
LCD可由为液晶照明的方式有两种:传送式和反射式传送式屏幕要使用外加光源照明,称为背光(backlight),照明光源要安装在LCD的背后。传送式LCD在正常光线及暗光线下,显示效果都很好,但在户外,尤其在日光下,很难辩清显示内容。 反射式屏幕,则不需要外加照明电源,使用周围环境的光线(或在某些笔记本中,使用前部照明系统的光线)。这样,反射式屏幕就没有背光,所以,此种屏幕在户外或光线充足的室内,才会有出色的显示效果,但在一般室内光线下,这种显示屏的显示效果就不及背光传送式的。
文件操作结构体的主要函数
open: 用于打开文件设备release: 在关闭文件的调用read: 用于从设备中读取数据write: 向设备发送数据poll: 查询设备是否可读或可写ioctl: 提供执行设备特定命令的方法fasync: 用于设备的异步通知操作
U-BootDriverMode驱动模型
U-BootDriverMode驱动模型U-Boot DM 三要素DM 是 U-Boot 中的驱动框架,全称 Driver Mode。
像 Linux Kernel 中的驱动三要素 device 、bus 、driver ⼀样,DM 也有⾃⼰的三要素:udevice、uclass、driver。
udevice 描述具体的某⼀个硬件设备。
driver 是与这个设备匹配的驱动。
uclass 是同⼀类设备的抽象,提供管理同⼀类设备的抽象接⼝。
udevice通过三种途径⽣成:dts 设备节点UBOOTDEVICE(__name) 宏申明主动调⽤device_bind_xxx系列 API根据当前 U-Boot 的编程哲学,基本⼤部分设备都是通过 dts 来描述,还有少部分设备因为特殊原因,可以通过U_BOOT_DEVICE(_name)宏申明。
在UBoot DM 初始化阶段(initfdm 和 initrdm),通过调⽤ dm_init_and_scan(boolpre_reloc_only)根据名称 (UBOOT_DEVICE 中和 driver 的 name,或者 dts 和 driver 的 compatible) 匹配到对应的 driver,然后调⽤device_bind_common函数⽣成 udevice,udevice 会和 driver 绑定,并根据driver 中的uclass id 找到对应的 uclass driver,并⽣成相应的 uclass,并把该设备挂到 uclass 的设备节点之下。
最后调⽤ driver 的 bind 函数。
还有部分特殊的驱动,他们并不存在实际意义上的设备,⽐如 MMC ⼦系统中的 mmcblk 驱动,该驱动主要是把所有的 mmc 设备注册到更上⼀层的 blk ⼦系统中,向 blk 层提供操作 mmc 设备的 blkops,向下通过mmc uclass 提供的统⼀接⼝控制 mmc 设备。
电源管理方式的变更,driver.pm.suspend

电源管理⽅式的变更,driver.pm.suspend 与 i2c_driver.suspend 新版linux系统设备架构中关于电源管理⽅式的变更based on linux-2.6.32⼀、设备模型各数据结构中电源管理的部分linux的设备模型通过诸多结构体来联合描述,如struct device,struct device_type,struct class,struct device_driver,struct bus_type等。
@kernel/include/linux/devices.h中有这⼏中结构体的定义,这⾥只列出和PM有关的项,其余查看源码:struct device{...struct dev_pm_info power;...}struct device_type {...int (*uevent)(struct device *dev, struct kobj_uevent_env *env);char *(*devnode)(struct device *dev, mode_t *mode);void (*release)(struct device *dev);const struct dev_pm_ops *pm;};struct class {...void (*class_release)(struct class *class);void (*dev_release)(struct device *dev);int (*suspend)(struct device *dev, pm_message_t state);int (*resume)(struct device *dev);const struct dev_pm_ops *pm;...};struct device_driver {...int (*probe) (struct device *dev);int (*remove) (struct device *dev);void (*shutdown) (struct device *dev);int (*suspend) (struct device *dev, pm_message_t state);int (*resume) (struct device *dev);const struct dev_pm_ops *pm;...};struct bus_type {...int (*match)(struct device *dev, struct device_driver *drv);int (*uevent)(struct device *dev, struct kobj_uevent_env *env);int (*probe)(struct device *dev);int (*remove)(struct device *dev);void (*shutdown)(struct device *dev);int (*suspend)(struct device *dev, pm_message_t state);int (*resume)(struct device *dev);const struct dev_pm_ops *pm;...};以上可以看出和电源管理相关的两个结构体是struct dev_pm_info和struct dev_pm_ops,他们定义于⽂件@kernel/include/linux/pm.hstruct dev_pm_info {pm_message_t power_state;unsigned int can_wakeup:1;unsigned int should_wakeup:1;enum dpm_state status;#ifdef CONFIG_PM_SLEEPstruct list_head entry;#endif#ifdef CONFIG_PM_RUNTIME // undefstruct timer_list suspend_timer;unsigned long timer_expires;struct work_struct work;wait_queue_head_t wait_queue;spinlock_t lock;atomic_t usage_count;atomic_t child_count;unsigned int disable_depth:3;unsigned int ignore_children:1;unsigned int idle_notification:1;unsigned int request_pending:1;unsigned int deferred_resume:1;enum rpm_request request;enum rpm_status runtime_status;int runtime_error;#endif};struct dev_pm_ops {int (*prepare)(struct device *dev);void (*complete)(struct device *dev);int (*suspend)(struct device *dev);int (*resume)(struct device *dev);int (*freeze)(struct device *dev);int (*thaw)(struct device *dev);int (*poweroff)(struct device *dev);int (*restore)(struct device *dev);int (*suspend_noirq)(struct device *dev);int (*resume_noirq)(struct device *dev);int (*freeze_noirq)(struct device *dev);int (*thaw_noirq)(struct device *dev);int (*poweroff_noirq)(struct device *dev);int (*restore_noirq)(struct device *dev);int (*runtime_suspend)(struct device *dev);int (*runtime_resume)(struct device *dev);int (*runtime_idle)(struct device *dev);};⼆、device中的dev_pm_info结构体device结构体中的power项⽤来将该设备纳⼊电源管理的范围,记录电源管理的⼀些信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上节我们分析设备驱动模型中的device,主要是drivers/base/core.c,可以说是代码量最大的一个文件。
本节要分析的驱动driver,就要相对简单很多。
原因也很简单,对于driver,我们能定义的公共部分实在不多,能再sysfs中表达的也很少。
本节的分析将围绕drivers/base/driver.c,但头文件仍然是include/linux/device.h和drivers/base/base.h。
先让我们来看看driver的结构。
[cpp]view plaincopyprint?1.struct device_driver {2.const char *name;3.struct bus_type *bus;4.5.struct module *owner;6.const char *mod_name; /* used for built-in modules */7.8.bool suppress_bind_attrs; /* disables bind/unbind via sysfs */9.10.int (*probe) (struct device *dev);11.int (*remove) (struct device *dev);12.void (*shutdown) (struct device *dev);13.int (*suspend) (struct device *dev, pm_message_t state);14.int (*resume) (struct device *dev);15.const struct attribute_group **groups;16.17.const struct dev_pm_ops *pm;18.19.struct driver_private *p;20.};struct device_driver就是模型定义的通用驱动结构。
name是驱动名称,但这个name也只是在静态定义的初始名称,实际使用的名称还是由kobject中保管的。
bus执行驱动所在的总线,owner是驱动所在的模块,还有一个所在模块名称mod_name,suppress_bind_attrs 定义是否允许驱动通过sysfs决定挂载还是卸载设备。
下面是一系列函数指针,probe是在驱动刚与设备挂接时调用的,remove是在设备卸载时调用的,shutdown是在设备关闭时调用的(说实话我现在还不知道remove和shutdown的区别),suspend是设备休眠时调用的,resume是设备恢复时调用的。
group是属性集合,pm是电源管理的函数集合,p是指向driver_private的指针。
[cpp]view plaincopyprint?1.struct driver_private {2.struct kobject kobj;3.struct klist klist_devices;4.struct klist_node knode_bus;5.struct module_kobject *mkobj;6.struct device_driver *driver;7.};8.#define to_driver(obj) container_of(obj, struct driver_private, kobj)与device类似,device_driver把与其它组件联系的大部分结构变量移到structdriver_private中来。
首先是kobj,在sysfs中代表driver目录本身。
klist_devices是驱动下的设备链表,knode_bus是要挂载在总线的驱动链表上的节点。
mkobj是driver与相关module的联系,之前在device_driver结构中已经有指向module的指针,但这还不够,在/sys下你能发现一个module目录,所以驱动所属的模块在sysfs中也有显示,具体留到代码中再看。
driver指针自然是从driver_private指回struct device_driver的。
[cpp]view plaincopyprint?1.struct driver_attribute {2.struct attribute attr;3. ssize_t (*show)(struct device_driver *driver, char *buf);4. ssize_t (*store)(struct device_driver *driver, const char *buf,5.size_t count);6.};7.8.#define DRIVER_ATTR(_name, _mode, _show, _store) \9.struct driver_attribute driver_attr_##_name = \10. __ATTR(_name, _mode, _show, _store)除了以上两个结构,还有struct driver_attribute。
driver_attribute是driver对struct attribute 的封装,添加了两个特用于device_driver的读写函数。
这种封装看似简单重复,工作量很小,但在使用时却会造成巨大的便利。
好,结构介绍完毕,下面看driver.c中的实现。
[cpp]view plaincopyprint?1.static struct device *next_device(struct klist_iter *i)2.{3.struct klist_node *n = klist_next(i);4.struct device *dev = NULL;5.struct device_private *dev_prv;6.7.if (n) {8. dev_prv = to_device_private_driver(n);9. dev = dev_prv->device;10. }11.return dev;12.}13.14.int driver_for_each_device(struct device_driver *drv, struct device *start,15.void *data, int (*fn)(struct device *, void *))16.{17.struct klist_iter i;18.struct device *dev;19.int error = 0;20.21.if (!drv)22.return -EINVAL;23.24. klist_iter_init_node(&drv->p->klist_devices, &i,25. start ? &start->p->knode_driver : NULL);26.while ((dev = next_device(&i)) && !error)27. error = fn(dev, data);28. klist_iter_exit(&i);29.return error;30.}31.struct device *driver_find_device(struct device_driver *drv,32.struct device *start, void *data,33.int (*match)(struct device *dev, void *data))34.{35.struct klist_iter i;36.struct device *dev;37.38.if (!drv)39.return NULL;40.41. klist_iter_init_node(&drv->p->klist_devices, &i,42. (start ? &start->p->knode_driver : NULL));43.while ((dev = next_device(&i)))44.if (match(dev, data) && get_device(dev))45.break;46. klist_iter_exit(&i);47.return dev;48.}driver_for_each_device()是对drv的设备链表中的每个设备调用一次指定函数。
driver_find_device()是在drv的设备链表中寻找一个设备,寻找使用指定的匹配函数。
这两个函数都不陌生,在之前分析device的core.c中已经见到与它们很类似的函数,只不过那里是遍历设备的子设备链表,这里是遍历驱动的设备链表。
next_device()同样是辅助用的内部函数。
[cpp]view plaincopyprint?1.int driver_create_file(struct device_driver *drv,2.struct driver_attribute *attr)3.{4.int error;5.if (drv)6. error = sysfs_create_file(&drv->p->kobj, &attr->attr);7.else8. error = -EINVAL;9.return error;10.}11.12.void driver_remove_file(struct device_driver *drv,13.struct driver_attribute *attr)14.{15.if (drv)16. sysfs_remove_file(&drv->p->kobj, &attr->attr);17.}driver_create_file()创建drv下的属性文件,调用sysfs_create_file()实现。
driver_remove_file()删除drv下的属性文件,调用sysfs_remove_file()实现。
[cpp]view plaincopyprint?1.static int driver_add_groups(struct device_driver *drv,2.const struct attribute_group **groups)3.{4.int error = 0;5.int i;6.7.if (groups) {8.for (i = 0; groups[i]; i++) {9. error = sysfs_create_group(&drv->p->kobj, groups[i]);10.if (error) {11.while (--i >= 0)12. sysfs_remove_group(&drv->p->kobj,13. groups[i]);14.break;15. }16. }17. }18.return error;19.}20.21.static void driver_remove_groups(struct device_driver *drv,22.const struct attribute_group **groups)23.{24.int i;25.26.if (groups)27.for (i = 0; groups[i]; i++)28. sysfs_remove_group(&drv->p->kobj, groups[i]);29.}driver_add_groups()在drv目录下添加属性集合,调用sysfs_create_groups()实现。