通用技术试卷Word版
(完整版)2019年4月浙江省通用技术选考word版(含答案)
第二部分通用技术(共50分)一、选择题(本大题共13小题,毎小题2分,共26分。
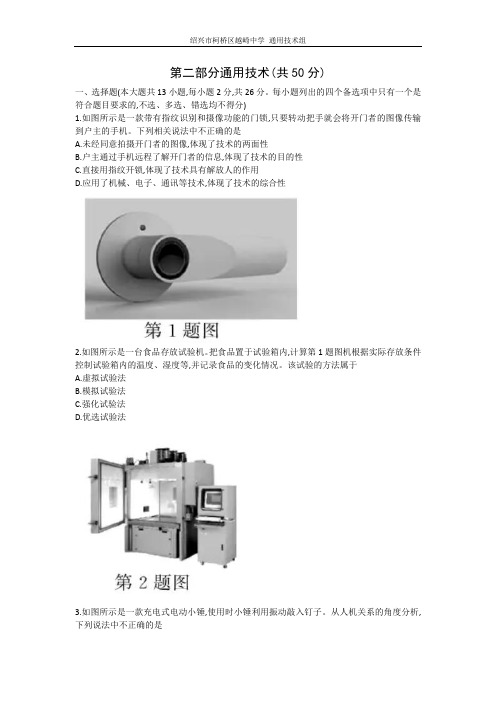
每小题列出的四个备选项中只有一个是符合题目要求的,不选、多选、错选均不得分)1.如图所示是一款带有指纹识别和摄像功能的门锁,只要转动把手就会将开门者的图像传输到户主的手机。
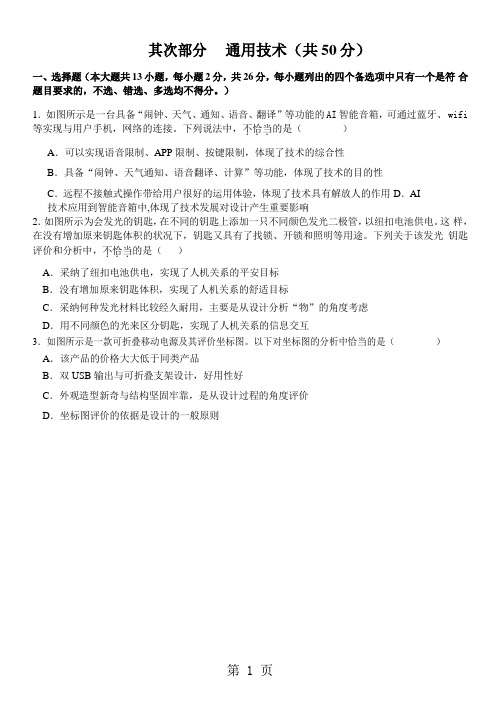
下列相关说法中不正确的是A.未经同意拍摄开门者的图像,体现了技术的两面性B.户主通过手机远程了解开门者的信息,体现了技术的目的性C.直接用指纹开锁,体现了技术具有解放人的作用D.应用了机械、电子、通讯等技术,体现了技术的综合性2.如图所示是一台食品存放试验机。
把食品置于试验箱内,计算第1题图机根据实际存放条件控制试验箱内的温度、湿度等,并记录食品的变化情况。
该试验的方法属于A.虚拟试验法B.模拟试验法C.强化试验法D.优选试验法3.如图所示是一款充电式电动小锤,使用时小锤利用振动敲入钉子。
从人机关系的角度分析,下列说法中不正确的是A.锤头角度调节方便,实现了高效目标B.利用振动敲钉子,避免敲伤手,实现了安全目标C.手柄的大小合适,考虑了人的静态尺寸D.没有电线,适用于更多场合,主要考虑了人的动态尺寸4.如图所示是一款具有杀菌功能的床铺除尘机器人。
下列关于该机器人的设计分析和评价中不正确的是A.操作简单,使用方便,主要考虑了人的因素B.有杀菌除尘功能,符合设计的实用原则C.因在床铺上使用,设计时机器人的机身高度不受限制D.能识别床铺的边沿,不会掉落,考虑到了环境的因素请根据第5~6题图完成5~6题。
5.图中漏标的尺寸共有A.1处B.2处C.3处D.4处6.通用技术实践课上,小明准备用160mm×45mm×8mm的钢板加工该零件,下列说法中不正确的是A.可用半圆锉来锉削加工R22的圆弧B.加工流程可以为:划线→冲眼→钻孔→锯割→锉削C.为防止钻屑伤手,在台钻上钻孔时要戴手套D.加工中需要用到钢直尺、钢锯、划规、麻花钻7.如图所示是一种结构对称的增力机构。
通用技术部分试卷

第二部分通用技术一、选择题(本大题共13小题,每小题2分。
每小题列出的四个备选项中只有一个符合题目要求的,不选、多选、错选均不得分)1.如图所示是一款“地毯闹钟”。
清晨到了设定时间,闹钟响起,需要人双脚踩在地毯上至少3秒后铃声关闭。
夜晚想要查看时间或者点亮 LED屏幕进行照亮,踏上地毯即可。
下列关于这款地毯闹钟的说法不正确...的是是否显示,LED亮灭,闹铃声有无C.双脚踩在地毯上至少3秒钟,是为了克服了行人路过地毯的干扰第1题图2.如图所示是一款红外感应自动门,当人走近时门自动打开。
该自动门由红外传感器、微电脑控制芯片、电机传动机构等部件组成。
下列关于该自动门控制系统的说法正确的是A.需要人靠近时门才打开,故此控制系统属于人工控制B.需要检测人体热辐射信号,自动门才能打开,故被控对象是红外传感器C.系统有检测装置,故此控制系统属于闭环控制系统D.红外传感器是该系统的输入部分第2题图第3题图3.如果所示,是利用多用电表测量负温度系数热敏电阻两端电压随温度变化的电路图,当水温升高时,下列判断正确的是A.电压减小,热敏电阻阻值增大B.电压减小,热敏电阻阻值减小C.电压增大,热敏电阻阻值增大D.电压增大,热敏电阻阻值减小5.小通根据通用技术课所学的知识,想设计一个博物馆文物防盗报警系统,一旦文物被移动,该报警系统就会自动报警,下列不适合...做该防盗报警系统输入设备的是6.小明根据电路图选择元件,以下不需要的元件是A. B. C. D.第6题图第78题图如图所示是三极管控制发光二极管的电路,根据V1基极输入情况控制V2发光或不发光。
若将该电路用于光控路灯模型。
请根据题意完成78题。
7.设计该光控路灯模型,应选择的传感器是A. B. C. D.8.要实现光线亮时V2熄灭,光线暗时V2点亮的功能,下列元器件与电路连接正确的是A. B. C. D.9.已知图示电路中电源两端电压3V ,R1=2Ω,R2=1Ω,以下说法错误..的是 A.开关断开时,E 、F 、G 点电位均为0 B.开关闭合后,E 点电位变为3V C.开关闭合后,F 点电位变为1VD.无论开关闭合还是断开,G 点电位始终为3V 10.如图所示为硅型普通二极管,以下分析正确的是 A.可标注为“N ”、“”、“阴极”的是①脚;可标注为“P ”、“+”、“阳极”的是②脚D.如果在电路中①端的电位是3V ,②端电位约为3.7V ,则该元件处于导通状态11.某部门年终考核中,有A 、B 、C 三位考核人员,要求A 必须同意,同时B 、C 中至少有一位同意,考核结果F 才算通过。
浙江省“七彩阳光”联盟2024届高三上学期期初联考通用技术试题(word版)
其次部分通用技术(共50 分)一、选择题(本大题共13 小题,每小题2 分,共26 分,每小题列出的四个备选项中只有一个是符合题目要求的,不选、错选、多选均不得分。
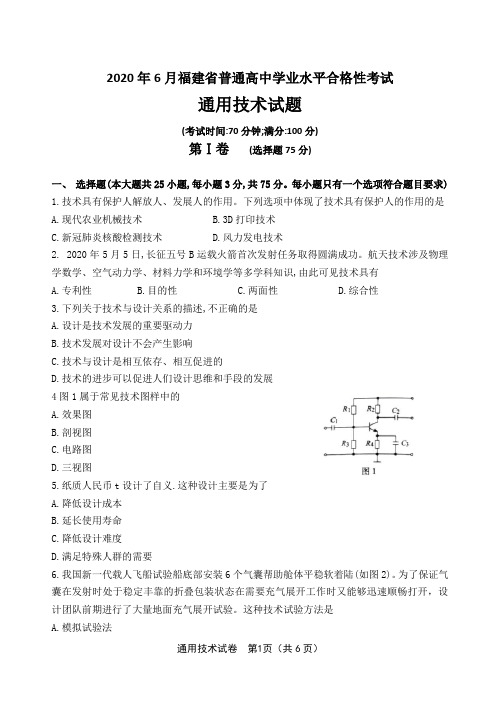
)1.如图所示是一台具备“闹钟、天气、通知、语音、翻译”等功能的AI 智能音箱,可通过蓝牙、wifi 等实现与用户手机,网络的连接。
下列说法中,不.恰.当.的是()A.可以实现语音限制、APP 限制、按键限制,体现了技术的综合性B.具备“闹钟、天气通知、语音翻译、计算”等功能,体现了技术的目的性C.远程不接触式操作带给用户很好的运用体验,体现了技术具有解放人的作用D.AI技术应用到智能音箱中,体现了技术发展对设计产生重要影响2.如图所示为会发光的钥匙,在不同的钥匙上添加一只不同颜色发光二极管,以纽扣电池供电。
这样,在没有增加原来钥匙体积的状况下,钥匙又具有了找锁、开锁和照明等用途。
下列关于该发光钥匙评价和分析中,不.恰.当.的是()A.采纳了纽扣电池供电,实现了人机关系的平安目标B.没有增加原来钥匙体积,实现了人机关系的舒适目标C.采纳何种发光材料比较经久耐用,主要是从设计分析“物”的角度考虑D.用不同颜色的光来区分钥匙,实现了人机关系的信息交互3.如图所示是一款可折叠移动电源及其评价坐标图。
以下对坐标图的分析中恰当的是()A.该产品的价格大大低于同类产品B.双USB 输出与可折叠支架设计,好用性好C.外观造型新奇与结构坚固牢靠,是从设计过程的角度评价D.坐标图评价的依据是设计的一般原则第3 题图4.如图所示为一款木质简易笔记本电脑桌,运用时桌脚向外倾斜肯定角度,收纳时桌脚向内翻折。
下列桌面与桌脚的连接件设计方案中最合理的是()A B C D5.以下三视图能成立的是()A BC D6.把大小合适的木板加工成如图所示的产品,以下工具不.需.要.的是()A B C D7.如图所示手摇打蛋器,一手握住打蛋器手柄,一手摇动摇柄,打蛋头高速转动。
福建省2020年6月高中学业水平考试通用技术卷试题(Word打印)
2020年6月福建省普通高中学业水平合格性考试通用技术试题(考试时间:70分钟;满分:100分)第Ⅰ卷(选择题75分)一、选择题(本大题共25小题,每小题3分,共75分。
每小题只有一个选项符合题目要求)1.技术具有保护人解放人、发展人的作用。
下列选项中体现了技术具有保护人的作用的是A.现代农业机械技术B.3D打印技术C.新冠肺炎核酸检测技术D.风力发电技术2. 2020年5月5日,长征五号B运载火箭首次发射任务取得圆满成功。
航天技术涉及物理学数学、空气动力学、材料力学和环境学等多学科知识,由此可见技术具有A.专利性B.目的性C.两面性D.综合性3.下列关于技术与设计关系的描述,不正确的是A.设计是技术发展的重要驱动力B.技术发展对设计不会产生影响C.技术与设计是相互依存、相互促进的D.技术的进步可以促进人们设计思维和手段的发展4图1属于常见技术图样中的A.效果图B.剖视图C.电路图D.三视图5.纸质人民币t设计了自义.这种设计主要是为了A.降低设计成本B.延长使用寿命C.降低设计难度D.满足特殊人群的需要6.我国新一代载人飞船试验船底部安装6个气囊帮助舱体平稳软着陆(如图2)。
为了保证气囊在发射时处于稳定丰靠的折叠包装状态在需要充气展开工作时又能够迅速顺畅打开,设计团队前期进行了大量地面充气展开试验。
这种技术试验方法是A.模拟试验法B.移植试验法C.优选试验法D.虚拟试验法7.某同学对台灯的三个设计方案进行比较评估,列表如下。
下列选项中说法正确的是A.方案1的成本最低B.方案1的美观程度优于方案3C.方案2比方案1更优D.三个方案的结构稳定程度一样8.下列内容没有必要写入感冒药使用说明书中的是A.药品名称B.用法及禁忌事项C.功能主治D.出售药品的商店名称9.我国对知识产权进行司法保护,尊重创新。
下列行为没有侵犯知识产权的是A.盗用他人商标生产假冒产品B.用自己创新设计的作品参加科技创新比赛C.在电影院用手机翻拍影片并在网络上发布D.未经授权在微信公众号上转发他人原创作品10.护士姐姐告诉小明,口罩戴久了会勒痛耳朵,于是他利用牛奶箱的提手制作了一个“口罩防勒耳神器”解决了这个问题(如图3)。
2023年6月浙江省普通高校招生选考通用技术真题Word版含解析
2023年6月浙江省普通高校招生选考科目考试技术试题考生须知:1 .考生答题前,务必将自己的姓名、准考证号用黑色字迹的签字笔或钢笔填写在答题纸上。
2 .选择题的答案须用2B铅笔将答题纸上对应题目的答案标号涂黑,如要改动,须将原填涂处用橡皮擦净。
3 .非选择题的答案须用黑色字迹的签字笔或钢笔写在答题纸上相应区域内,作图时可先使用2B铅笔,确定后须用黑色字迹的签字笔或钢笔描黑,答案写在本试题卷上无效。
第二部分通用技术(共50分)一、选择题(本大题共12小题,每小题2分,共24分。
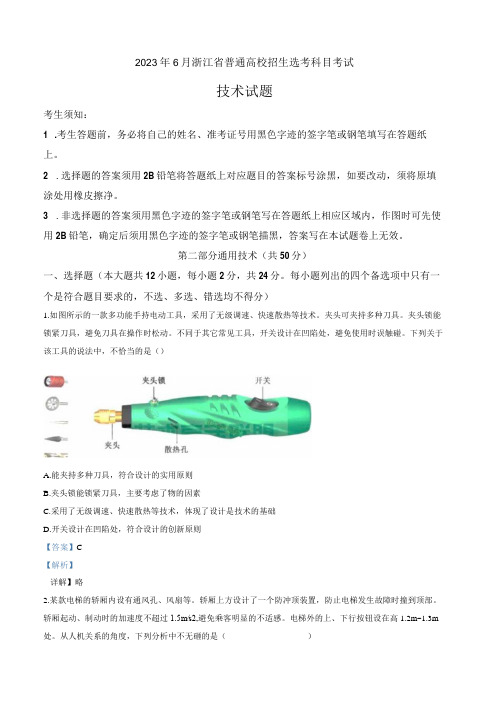
每小题列出的四个备选项中只有一个是符合题目要求的,不选、多选、错选均不得分)1.如图所示的一款多功能手持电动工具,采用了无级调速、快速散热等技术。
夹头可夹持多种刀具。
夹头锁能锁紧刀具,避免刀具在操作时松动。
不同于其它常见工具,开关设计在凹陷处,避免使用时误触碰。
下列关于该工具的说法中,不恰当的是()A.能夹持多种刀具,符合设计的实用原则B.夹头锁能锁紧刀具,主要考虑了物的因素C.采用了无级调速、快速散热等技术,体现了设计是技术的基础D.开关设计在凹陷处,符合设计的创新原则【答案】C【解析】详解】略2.某款电梯的轿厢内设有通风孔、风扇等。
轿厢上方设计了一个防冲顶装置,防止电梯发生故障时撞到顶部。
轿厢起动、制动时的加速度不超过1.5m∕s2,避免乘客明显的不适感。
电梯外的上、下行按钮设在高1.2m~1.3m 处。
从人机关系的角度,下列分析中不无砸的是()A.轿厢内设有通风孔、风扇等,实现了人机关系的健康目标B.轿厢上方设计的防冲顶装置,实现了人机关系的舒适目标C.上、下行按钮的设计高度,考虑了人的静态尺寸D.对加速度的限制,考虑了人的生理需求【答案】B【解析】【详解】略3.小明发现家中方凳的梯接松动,设计了下列四种加固方案,其中不合理的是()【案】D【解析】【详解】略4.下列通用技术实践操作过程中,不合理的是()A.凿柳眼前先将木料固定,敲击凿子时,一手紧握凿柄,不让凿子摆动B.在电路板上手工锡焊元器件时,按以下步骤进行:加焊锡T加热焊盘和焊件T移走焊锡一移走烙铁C.在金属小工件上钻孔时,用专用工具夹持,不能直接用手扶持D.锂削金属工件时,用刷子清除切屑,不能用嘴吹切屑或直接用手清除切屑【答案】B【解析】【详解】略5.如图所示是某厂瓦楞纸箱的生产工艺流程图。
通用技术学考考试试题22(含5篇)

通用技术学考考试试题22(含5篇)第一篇:通用技术学考考试试题22【单选题-1】下列表述中,未能体现技术目的性的是()A.中国人发明的筷子 B.节能灯的出现C.环保餐盒的发明D.台风带来的降水缓解了干旱【单选题-2】发明爱好者方青年,学习并运用多种知识发明了“连体式全电控薄壁电压力锅”,解决了原电压力锅安全性低、操作复杂等缺陷,并取得了专利。
下列说法合理的是()A.发明中提高了自身素质,体现技术可以保护人 B.申请专利,体现技术的目的性 C.发明中运用多种知识,体现技术的综合性D.原产品操作复杂,体现技术的两面性【单选题-3】B超技术的不良使用,从而导致男女比例失衡,这主要反映了技术的() A.目的性 B.创新性 C.两面性 D.专利性【单选题-4】电动剃须刀发明之初体积很大,携带不方便。
于是有人设计出一种小巧、便携式的电动剃须刀。
这一设计推动了电机微型化技术的发展。
这个案例说明了什么()A.设计是技术发展的重要驱动力B.技术的发展与设计无关 C.技术的发展对设计不产生影响 D.技术的丰富内涵【单选题-5】人类经历了使用简单工具进行零件手工加工、使用传统车床进行零件机械加工、使用数控车床进行工程设备的机械加工等阶段。
这样的发展过程属于() A.技术产生 B.技术革新 C.科学发现 D.技术跳跃【单选题-6】2007年5月16日,中科院院士欧阳自远说:我国探月二期工程将新研制的软着陆器和月球车,对月球进行探测地形、研究表面化学成分和矿物质的活动。
这个案例说明科学与技术的关系是()A.技术推动了科学进步 B.先有技术后产生科学C.科学的进步完全依赖于技术的发展 D.没有科学就没有技术【单选题-7】我们在设计制作的过程中,为了降低制作成本和制作难度,常希望使用一些“标准件”。
你对“标准件”的理解是()A.国家给予统一标准代号的零部件B.经国家检验合格或免检的零部件C.全国统一价格的零部件D.已经获得专利并得到保护的零部件【单选题-8】以往电路图的设计都是手工绘制,烦琐且易出错。
2019.1浙江省通用技术学考真题及答案(word版1)教学文案
2019.1浙江省通用技术学考真题及答案(w o r d版1)第二部分通用技术(共35分)一、选择题(本大题共10小题,每小题2分,共20分。
每小题列出的四个备选项中只有一个是符合题目要求的,不选、多选、错选均不得分)1.如图所示的背包上装有太阳能电池板。
下列说法中不正确的是A.太阳能电池技术的发展对背包的设计产生影B.能对手机等数码产品充电,体现了技术的目的性C.增加了背包重量,体现了技术的两面性D.应用了多学科知识,体现了技术的综合性第1题图2.在电水壶设计中,为了实现合理的人机关系,从信息交互角度考虑的设计是A.弧形手柄B.可收纳绕线盘C.水垢过滤网D.加热指示灯3.小明尝试设计一款小木凳,从结构强度和稳定性的角度分析,下列设计方案中不合理的是4.根据轴测图判断三视图中缺少的图线有A.1条B.2条C.3条D.4条第4题图5.如图所示是一种压紧装置示意图。
在力F作用下,加力杆通过连杆带动压杆将物体压紧支撑杆1、支撑杆2、销轴的主要受力形式是A.支撑杆1受压、支撑杆2受压、销轴受弯曲B.支撑杆1受压、支撑杆2受拉、销轴受弯曲C.支撑杆1受压、支撑杆2受压、销轴受剪切D.支撑杆1受拉、支撑杆2受压、销轴受剪切第5题图6,小明用10mm厚的木板制作一个粉笔盒,板与板之间的连接方式不合理的是A.铆接B.胶接C.榫接D.铁钉连接7.如图所示为某单位高纯度水制作流程示意图。
以下对该流程的分析正确的是第7题图A.紫外灯与蒸馏器是串行环节B.纯化水经紫外灯消毒,可以用作注射用水C.预过滤环节与精滤环节的时序可颠倒D.清洗用水从二级反渗透环节后取用,会提高生产成本8.根据消防要求,仓库、图书馆等场所需要安装火灾自动报警控制系统。
如有火灾发生,烟雾探测器检测到室内的烟雾信号,经控制电路分析处理后,驱动扬声器发出报警声。
下列对该控制系统的分析中不正确的是A.被控对象是扬声器B.输出量是报警声C.控制量是烟雾的浓度D.控制的方式是开环控制如图所示是苿即热式饮水机设计方案。
通用技术习题(word版含答案)
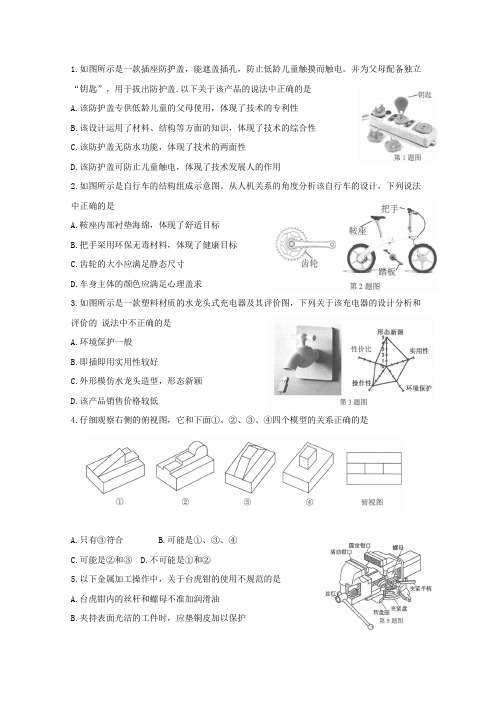
1.如图所示是一款插座防护盖,能遮盖插孔,防止低龄儿童触摸而触电。
并为父母配备独立“钥匙”,用于拔出防护盖.以下关于该产品的说法中正确的是A.该防护盖专供低龄儿童的父母使用,体现了技术的专利性B.该设计运用了材料、结构等方面的知识,体现了技术的综合性C.该防护盖无防水功能,体现了技术的两面性D.该防护盖可防止儿童触电,体现了技术发展人的作用2.如图所示是自行车的结构组成示意图。
从人机关系的角度分析该自行车的设计,下列说法中正确的是A.鞍座内部衬垫海绵,体现了舒适目标B.把手罙用环保无毒材料,体现了健康目标C.齿轮的大小应满足静态尺寸D.车身主体的颜色应满足心理盖求3.如图所示是一款塑料材质的水龙头式充电器及其评价图,下列关于该充电器的设计分析和评价的说法中不正确的是A.环境保护一般B.即插即用实用性较好C.外形模仿水龙头造型,形态新颖D.该产品销售价格较低4.仔细观察右侧的俯视图,它和下面①、②、③、④四个模型的关系正确的是A.只有③符合B.可能是①、③、④C.可能是②和③D.不可能是①和②5.以下金属加工操作中,关于台虎钳的使用不规范的是A.台虎钳内的丝杆和螺母不准加润滑油B.夹持表面光洁的工件时,应垫铜皮加以保护C.锉削时工件应尽虽夹持在台虎柑钳口的中间位賈D.台虎钳夹持工件的力,只能尽双手的力扳紧手柄,不能在手柄上加套管子或锤敲击6.在自动控制机械装罝中,广泛采用着各种形式的凸轮机构。
凸轮是一个具有曲线轮廓或凹槽的构件,通常为主动件作等速运动,被凸轮直接推动的构件称为推杆。
下图所示的四种凸轮机构中,可实现直线运动转换为直线运动的机构是7.用一块尺寸为800mm×70mm×3mm的铝板手工加工一个如图所示的手机托架,中间用于穿电源线的槽宽度为8mm。
从加工的效率及所需材料的合理尺寸考虑,下列加工流程中最合适的是A.划线一锯割一弯折一锉削一钻孔B.划线一锯割一钻孔一锉削一弯折C.划线一钻孔一锉削一锯割一弯折D.划线一弯折-钻孔一锯割一锉削如图所示为在一些农村地区常见的抽水水果(也叫抽水b即筒)结构图及运动简图。
通用技术试题(含答案)

通用技术试题(时间:100分钟分值:100)一、选择题(共30分,每小题2分)1.1912年,在电灯发明50周年的时候,包括美国总统在内的500多名社会名流在华盛顿隆重集会庆祝。
爱迪生在经久不息的掌声中出场,他激动的说“倘若我做的工作给这个社会哪怕只带来一丝的幸福,那我也就因此而更加满足了……”这说明()A.技术解放人B.技术具有两面性C.技术活动能实现自我价值D.技术改变世界2.金属材料划线的一般步骤为()①冲眼②划尺寸线③划轮廓线④划出基准A.①②③④B.④②③①C.④①②③D.④③②①3.为了2008年北京奥运会会徽不受侵犯,设计部们应进行技术的什么保护。
()A.综合性B.两面性C.专利性D.目的性4.技术的发展使照明灯具迅速发展,一般街道上路灯照明选用的是()A.白炽灯 B.水银蒸气灯 C.霓虹灯D.金属卤化物灯5.“皮影戏”是我国的传统的民间艺术,演员只要在屏幕和灯光之间抖动如栓在“小兔”身上的细线,屏幕上就能出现生动活泼的小兔形象,这是一种控制现象,其控制对象是()A.细线B.“小兔”C.屏幕D.灯光6.吊兰支撑架使用三角形支架结构,而不用由一根直杆挑起的结构,这说明以下哪个因素()影响着结构强度?A.材料 B.形状C.构件D.连接方式7.随着激光技术的不断发展,激光唱片被设计出来。
它采用激光束照射唱片上的音槽,不会发出摩擦声,播放的乐曲优美纯净、自然动听。
并且采用激光技术后,唱片的信息量也大大增加。
这说明:()A. 技术的发展离不开设计B. 技术更新对设计产生主要影响C. 设计具有丰富的内涵D. 技术进步制约设计的发展8.具有MP4功能的手机要求能够长时间播放视频节目,这种设计要求电池的容量要大、体积要小,这促使电池生产厂家加快研发高能微型电池。
这个案例说明()。
A.设计创新促进了技术的发展B.设计与技术的发展无关C.技术总是无法满足设计的要求D.技术的发展不需要设计9.下图是一个材料弯曲测试示意图,通过逐一增加砖码质量,观测材料弯曲的程度;你认为这一试验属于:()A.性能试验B.优化试验C.信息试验D.预测试验10.我国古代中医经过长期的实践,总结出了一套比较科学的诊断工作流程:望诊->闻诊->问诊->切诊->处方;但是现在,中医的诊断也借助西医的物理检验手段来加强中医的诊断准确度,这样的流程优化属于:()A.工期优化B.技术优化C.成本优化D.质量优化11.我们使用计算机离不开Windows操作系统,他属于()A.自然系统B.人造系统C.实体系统D.抽象系统12.现在市场上有一种奶瓶,如图所示,与传统奶瓶最大区别是加了一根底端插有带孔小钢球的软管,这样无论奶瓶水平放置,还是倾斜、倒立,婴儿总能喝着水,而且不至于呛着。
高中《通用技术》考试卷(含答案)

高中《通用技术》考试卷(含答案)一、单项选择题(本大题共20小题,每小题3分,共60分。
每小题列出的四个选项中只有一个是符合题目要求的,不选、多选、错选均不得分)1、航天员失重训练是利用失重飞机完成的。
它可以完成抛物线飞行,形成15-40秒的微重力时间。
使航天员感受、体验和熟悉失重环境,还可以进行人在失重的时间里从舱体爬出来的试验,训练太空的出舱活动。
从技术试验方法看,该失重试验属于( B )A.移植试验法 B.模拟试验法C.强化试验法 D.虚拟试验法2、汽车行驶过程中,如果发生剧烈撞击,安全气囊能自动打开,保护车内乘员。
下列对安全气囊提出的设计要求,不恰当的是()A. 灵敏度高,一有震动就打开 B.气囊内的气体不可燃C.打开时不能爆炸 D.打开时不能伤害乘员3、如图2所示为设计新颖的桌子,其中一条桌腿带储物架,可以将配套的储物筐卡在L形的梢内,实现占用空间小、存储物品多、物品取放方便的H的。
以下说法不恰当的是( D )(图2)A.符合美观原则:桌子外观设计简洁,给人一种美的感受B.符合实用原则:占用空间小,存储物品多,物品取放方便C.符合创新原则:桌腿的截面被设计成L形储物架D.符合经济原则:采用劣质材料加工,以降低生产成本4、如图所示是一款壁挂式扬声器及其评价坐标图。
扬声器一侧的平台可以放置手机,通过数据线连接手机播放音乐,同时给手机充电。
根据该评价坐标图,下列说法中不恰当...的是( C )A.造型新颖B.实用性强C.价格低D.适合多种场合5、关于设计的评价,下列说法不合理的是(A )A.设计的评价可分为对设计者的自我评价和对设计成果的评价B.设计的交流贯穿于设计的全过程,是设计评价的基础C.设计评价标准的制定原则要客观、明确,体现科学性和可操作性D.无论是对设计设计过程的评价还是对设计成果的评价,都应建立在事实判断的基础上。
6、科学提供知识,技术提供应用这些知识的手段与方法。
科学是技术的基础,但有时候技术的发展会推动科学的进步。
2019.1浙江省通用技术学考真题及答案(word版1)

第二部分通用技术(共35分)一、选择题(本大题共10小题,每小题2分,共20分。
每小题列出的四个备选项中只有一个是符合题目要求的,不选、多选、错选均不得分)1.如图所示的背包上装有太阳能电池板。
下列说法中不正确的是A.太阳能电池技术的发展对背包的设计产生影B.能对手机等数码产品充电,体现了技术的目的性C.增加了背包重量,体现了技术的两面性D.应用了多学科知识,体现了技术的综合性第1题图2.在电水壶设计中,为了实现合理的人机关系,从信息交互角度考虑的设计是A.弧形手柄B.可收纳绕线盘C.水垢过滤网D.加热指示灯3.小明尝试设计一款小木凳,从结构强度和稳定性的角度分析,下列设计方案中不合理的是4.根据轴测图判断三视图中缺少的图线有A.1条B.2条C.3条D.4条第4题图5.如图所示是一种压紧装置示意图。
在力F作用下,加力杆通过连杆带动压杆将物体压紧支撑杆1、支撑杆2、销轴的主要受力形式是A.支撑杆1受压、支撑杆2受压、销轴受弯曲B.支撑杆1受压、支撑杆2受拉、销轴受弯曲C.支撑杆1受压、支撑杆2受压、销轴受剪切D.支撑杆1受拉、支撑杆2受压、销轴受剪切第5题图6,小明用10mm厚的木板制作一个粉笔盒,板与板之间的连接方式不合理的是A.铆接B.胶接C.榫接D.铁钉连接7.如图所示为某单位高纯度水制作流程示意图。
以下对该流程的分析正确的是第7题图A.紫外灯与蒸馏器是串行环节B.纯化水经紫外灯消毒,可以用作注射用水C.预过滤环节与精滤环节的时序可颠倒D.清洗用水从二级反渗透环节后取用,会提高生产成本8.根据消防要求,仓库、图书馆等场所需要安装火灾自动报警控制系统。
如有火灾发生,烟雾探测器检测到室内的烟雾信号,经控制电路分析处理后,驱动扬声器发出报警声。
下列对该控制系统的分析中不正确的是A.被控对象是扬声器B.输出量是报警声C.控制量是烟雾的浓度D.控制的方式是开环控制如图所示是苿即热式饮水机设计方案。
自来水经过滤装置后进入储水箱,再送到煮水箱当水位达到高水位时,进水电磁阀断电关闭,水位降到低水位时电磁阀通电进水。
完整word版,学业水平考试通用技术试卷
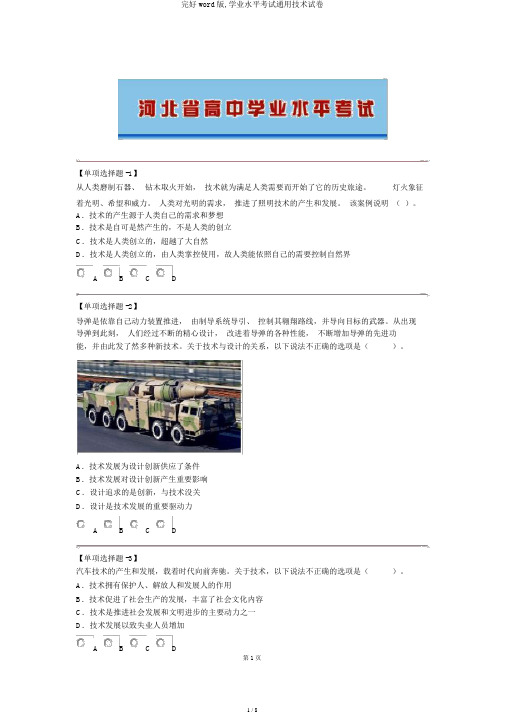
【单项选择题 -1】从人类磨制石器、钻木取火开始,技术就为满足人类需要而开始了它的历史旅途。
灯火象征着光明、希望和威力。
人类对光明的需求,推进了照明技术的产生和发展。
该案例说明()。
A.技术的产生源于人类自己的需求和梦想B.技术是自可是然产生的,不是人类的创立C.技术是人类创立的,超越了大自然D.技术是人类创立的,由人类掌控使用,故人类能依照自己的需要控制自然界A B C D【单项选择题 -2】导弹是依靠自己动力装置推进,由制导系统导引、控制其翱翔路线,并导向目标的武器。
从出现导弹到此刻,人们经过不断的精心设计,改进着导弹的各种性能,不断增加导弹的先进功能,并由此发了然多种新技术。
关于技术与设计的关系,以下说法不正确的选项是()。
A.技术发展为设计创新供应了条件B.技术发展对设计创新产生重要影响C.设计追求的是创新,与技术没关D.设计是技术发展的重要驱动力A B C D【单项选择题 -3】汽车技术的产生和发展,载着时代向前奔驰。
关于技术,以下说法不正确的选项是()。
A.技术拥有保护人、解放人和发展人的作用B.技术促进了社会生产的发展,丰富了社会文化内容C.技术是推进社会发展和文明进步的主要动力之一D.技术发展以致失业人员增加【单项选择题 -4】20世纪中叶,美国施乐公司发了然复印机,为了阻拦一些公司加入该领域,美国施乐公司先后为其研发的复印机申请了500 多项专利,几乎囊括了复印机的全部部件和要点技术环节,为公司带来了巨额利润。
关于知识产权制度,以下说法不正确的选项是()。
A.知识产权制度保护了发明创立者的积极性,却由于专利壁垒不利于技术发展B.知识产权制度保护技术发明者的合法权益,保护激励其发明创立的积极性C.知识产权制度表现了市场经济条件下人们对知识的敬爱和保护D.知识产权制度赞同专利全部权人对其专利拥有必然的垄断性A B C D【单项选择题 -5】高一年级的张强同学带领的通用技术活动小组要设计一款适合高中生使用的台灯。
2020年7月选考通用技术(word)含答案

第二部分通用技术(共50分)一、选择题(本大题共13小题,每小题2分,共26分。
每小题列出的四个备选项中只有一个是符合题目要求的,不选、多选、错选均不得分)1.如图所示购物车的尺寸中,不是从人机关系角度考虑的是A.350B.530C.650D.9002.如图所示是阶梯式楼梯栏杆及其评价坐标图。
根据坐标图,下列分析中不恰当的是A.扶手尺寸合适,人机关系好B.与直扶手相比,成本较低C.方便助力和搁放重物,实用性好D.支撑结构合理、扶手连接可靠,强度较高.3.小明要制作一个木质的篮球架模型,构思了下列设计方案,从稳定性角度考虑,其中合理的是通用技术实践课上,小明设计了如图所示的摆杆。
请根据图完成第4- -5 题。
4.图中漏标的尺寸共有A.2处B.3处C.4处D.5处.5.用4mm厚的钢板制作该摆杆,下列加工工艺中工具选择不合理的是A.划线:划针、划规和钢直尺B.锉削:锉刀、钢丝刷和台虎钳C.锯割:钢丝锯和台虎钳D.钻孔:麻花钻和手钳6.如图所示的压紧机构,在力F的作用下,驱动杆通过连杆1、摆杆、连杆2带动压杆向下运动,将工件压紧。
压紧时,连杆1和连杆2与摆杆垂直,且连杆2与压杆在同一直线上,此时连杆1、摆杆、连杆2、压杆的主要受力形式是A.连杆1受拉摆杆受扭转、连杆2受压、压杆受压和受弯曲B.连杆1受压摆杆受弯曲、连杆2受压、压杆受压和受弯曲C.连杆1受压、摆杆受扭转、连杆2受拉、压杆受压D.连杆1受压、摆杆受弯曲、连杆2受压、压杆受压7.如图所示的防疫通道,由顶板、地板、门架和墙板组成。
门架上安装有测温仪、摄像头、防护帘等。
下列关于该防疫通道安装流程的设计分析中正确的是A.把墙板安装到地板和把顶板安装到墙板应设计成串行工序B.先把摄像头、测温仪安装到门架,方便后续门架与墙板的安装C.在门架上安装防护帘和安装摄像头的时序不可颠倒D.两端门架与墙板的安装设计成并行工序,既可节省安装时间又可减少安装人员8.如图(a)所示是印刷机中纸筒放卷张力控制系统示意图。
通用技术月考卷.doc
2、A 、各项尺寸设计均参考儿童的有关参数B 、凳子上有加宽安全带等多项保护措施 碧莲中学通用技术月考卷本试卷分第I 卷和第H 卷两部分。
满分100分,考试时间60分钟。
请考生按规定用笔将所有试题的答案涂、写在答题纸上。
第I 卷(共72分)注意事项:1. 答第I 卷前,考生务必将自己的姓名、准考证号用黑色字迹的签字笔或钢笔填写在答题纸上。
2. 每小题选出答案后,用2B 铅笔把答题纸上对应题目的答案标号涂黑,如需改动,用橡皮擦干净后,再 选涂其他答案标号。
不能答在试题卷上。
一、选择题(本大题20小题,每小题3分,共60分。
在每小题给出的四个选项中,只有一 个是符合题目要求的。
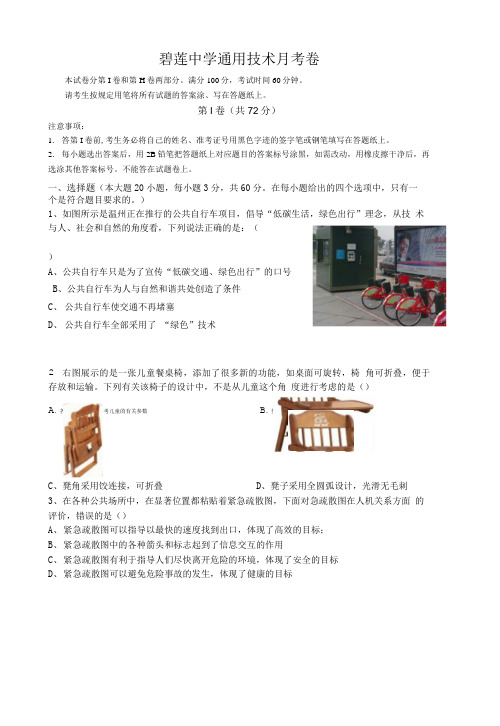
)1、如图所示是温州正在推行的公共自行车项目,倡导“低碳生活,绿色出行”理念,从技 术与人、社会和自然的角度看,下列说法正确的是:()A 、公共自行车只是为了宣传“低碳交通、绿色出行”的口号B 、公共自行车为人与自然和谐共处创造了条件C 、 公共自行车使交通不再堵塞D 、 公共自行车全部采用了 “绿色”技术右图展示的是一张儿童餐桌椅,添加了很多新的功能,如桌面可旋转,椅 角可折叠,便于存放和运输。
下列有关该椅子的设计中,不是从儿童这个角 度进行考虑的是() C 、凳角采用饺连接,可折叠D 、凳子采用全圆弧设计,光滑无毛刺 3、在各种公共场所中,在显著位置都粘贴着紧急疏散图,下面对急疏散图在人机关系方面 的评价,错误的是() A 、 紧急疏散图可以指导以最快的速度找到出口,体现了高效的目标;B 、 紧急疏散图中的各种箭头和标志起到了信息交互的作用C 、 紧急疏散图有利于指导人们尽快离开危险的环境,体现了安全的目标D 、 紧急疏散图可以避免危险事故的发生,体现了健康的目标练。
航天员所进行的失重试验从技术试验方法看,属于 B 、移植试验法 D 、模拟试验法7、下面有关工艺说法,有错误的是( A 、 划线时, B 、 铿削时, C 、 锯割时, D 、 钻孔时,4、小明同学购买了一款如图所示的电热水壶,下列对其进行评价的选项中,不属于功能评价的是( )A 、 有自动保温装置,随时能喝到热水B 、 具有加热指示装置,人机关系好C'、通电5—7分钟可以完成加热,使用方便、经济实惠D 、圆润的外形,设计新颖 5、如右图,几名英国游客在莫斯科加加林阿特拉斯宇航中心的飞机上尝试太空失重实验训( )A 、虚拟试验法C 、强化试验法)划针的头保持锐利,要紧贴导向工具,尽量一次划成。
通用技术选考试题:21 百校联考word稿(合卷含答案)
2020-2021学年高三百校3月联考技术试题考生须知:本试题卷分两部分,第一部分信息技术,第二部分通用技术。
全卷共 16页,第一部分1至8页,第二部分9至 14页。
满分100分,考试时间90分钟。
1.考生答题前,务必将自己的姓名、准考证号用黑色字迹的签字笔或钢笔填写在答题纸上。
2.选择题的答案须用2B铅笔将答题纸上对应题目的答案标号涂黑,如要改动,须将原填涂处用橡皮擦净。
3.非选择题的答案须用黑色字迹的签字笔或钢笔写在答题纸上相应区域内,作图时可先使用2B铅笔,确定后须用黑色字迹的签字笔或钢笔描黑,答案写在本试题卷上无效。
第一部分信息技术(共50分)一、选择题(本大题共12小题,每小题2分,共24分。
在每小题给出的四个选项中,只有一个符合题目要求)1.下列关于信息与信息技术的描述,正确的是A.无线通讯技术的出现,说明信息可以脱离载体传播B.信息技术是在计算机与网络技术出现之后出现的C.计算机通过音响播放音乐,人们听到的声音属于模拟信号D.华为5G 技术是指传输速率能达到 5Gps的通讯技术2.下列关于信息安全的说法,正确的是A.搜索引擎检索信息时,排名靠前的信息真实性更高B.智能手机随意连接公共场所的WIFI,存在感染病毒的风险C.刷脸认证一定比使用密码安全性更高D.使用加密技术后可以保证信息绝对安全3.用 Access 软件设计某来访人员登记信息系统的数据库,其中“来访人员表”中需要存储如图所示的数据。
下列关于该来访人员登记信息系统的描述,错误的是A.“来访人员表”中数据的字段名可以和上表中表头名不一致B.“来访人员表”中姓名数据的字段不可以设为主键C.“来访人员表”中身份证号数据的字段类型不能设置为“数字”D.“来访人员表”中同一条记录的各数据项的数据类型一定相同4. 使用UltraEdit软件观察字符“旻,读作mín”的内码,部分界面如图所示。
下列说法正确的是A.字符“旻,读作mín”中只有4个ASCII码字符B.字符“读”的十六进制码是“AC B6”C.字符串“Mn”的十六进制码是“4D 6E”D.字符“i”的二进制码是“01101000”5.用 Photoshop 制作“2021拼搏”作品,部分界面如图所示:下列说法正确的是A.“文字”图层添加了图层样式B.可以直接交换“背景”图层与“福字”图层顺序C.如果把画布大小放大到120%,“牛”图层中的图像也会放大D.对“花1”图层使用“自由变换”命令时,“花2”图层中的内容同步调整6.一段时长为10秒、24位真彩色、NTSC制式(30帧/秒)的未经压缩AVI格式无声视频,文件存储容量约为791MB,其分辨率为:A.600*800 B.1024*700 C.1280*720 D.1920*10807.VB 表达式 3 + 9 \ 7 * 5 的值是A.0B.3C.6D.88.某算法的部分流程图如图所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二部分通用技术(50分)
一、选择题(本大题共 题,每小题 分,共 。
在每小题给出的四个选项中,只有一个是符合题目要求的)
如图所示是一款微型多旋翼无人机,它是利用无线电
遥控设备和自备的程序控制装置操纵的不载人的飞机。
无人
机目前在航拍、灾难救援、观察野生动物、监控传染病、测
绘等领域得以应用,但是无人机飞行过程中也可能会发生失去控制坠落伤人。
下列关于无
人机的说法中,不合理
...的是
✌在航拍、灾难救援、测绘等等领域得以应用,体现了技术的综合性
从传统的飞机到无人机,体现了技术的创新性
无人机会失去控制坠落伤人,体现了技术的两面性
无人机能飞行航拍,体现了技术的目的性
以下是某冰箱企业设计时的部分分析,其中不是
..从人机关系静态和动态尺寸出发考虑的是
✌冰箱操作空间水平范围为 — ❍❍ 冰箱的最大高度低于 ❍❍
第 题图
冷冻箱、冷藏箱高度分别为 ❍❍、 显示部分的安装高度不高于 ❍❍
❍❍,上下层比例协调
如图所示是周星同学所在学校报告厅的座椅,他想
在座椅靠背后面设计一个可翻转的小桌板用来放置学习用具,
平时不用时桌板可以向上翻起收纳。
周星同学构思了多种方案,
下列方案中能实现上述功能的是
第 题图
✌
.如图所示的尺寸标注, 多标的尺寸有
第 题图
✌处 处 处 处
如图所示是一种可折叠结构,在悬臂上悬挂重物
后,悬臂与螺钉的主要受力及变形形式是
A 悬臂受拉、螺钉受拉 B 悬臂受弯曲、螺钉受压
C 悬臂受压、螺钉受压 D 悬臂受弯曲、螺钉受剪切
如图所示的工件 中间的孔槽是通的。
现用扁钢加工该工件,以下操作中正确的是
✌.用钢锯锯出 的弧形轮廓
.用圆锉修整⌦和 两段弧形的轮廓 .钻孔时为了安全带上手套
.钻孔后用平锉锉削中间凹槽的平面部分
用方钢加工如图所示的工件,以下加工流程中合理的是
✌划线→锯割→锉削→钻孔 划线→钻孔→锯割→锉削
划线→锉削→钻孔→锯割 划线→钻孔→锉削→锯割
如图所示是某机器零件的加工流程,该零件主要在机器外部使用。
对机器进行改
第 题图
第 题图
第 题图
进设计后,该零件调整为在机器内部使用。
从成本优化的角度考虑,原有流程中可省去的环节是
第 题图
✌ 截取合适的材料 表面研磨增加美观性
表面酸洗去除油污 表面氧化增加表面强度
汽车作为一个复杂的系统,其整体性能以及油耗、安全等各种性能都受到车身设计、动力技术、车身材料等各个因素的影响。
设计在实现功能、保证安全性的前提下,统筹兼顾成本、外观等因素,从系统分析的角度出发,这体现
✌.整体性原则、综合性原则 .整体性原则、科学性原则
.综合性原则、科学性原则 .整体性原则、相关性原则
如图所示是一款炒菜机器人,能自动炒菜。
其工
作原理是:选择想要炒的菜肴,加入菜肴中不同的原材料,
系统根据菜肴、所测的原材料数量等信息自动添加适量的
调料,同时自动定时翻炒以炒出可口的菜肴。
关于调料定
量添加与定时翻炒的控制,下列分析中正确的是
✌.定量控制系统有检测环节
.定时控制中定时器是被控对象
.实际投放的调料量是控制量 .定时控制是闭环控制
【加试题】用万用表欧姆档 档检测某型号性能正常的三极管(如图所示),当黑表笔接 管脚,红表笔接 管脚,测得电阻较大, 、 管脚交换表笔后测得的电阻也较大。
下列选项中,关于三极管各管脚极性判断正确的是
✌. 管脚为集电极, 管脚为发射极, 管脚为基极 . 管脚为发射极, 管脚为集电极, 管脚为基极 . 管脚为基极, 管脚为发射极, 管脚为集电极 . 管脚为发射极, 管脚为基极, 管脚为集电极
【加试题】有一种由磁性开关控制的自动水位控制装置,其基本原理结构如图所示:当储水箱内的水位降低到某一位置时,弹簧的弹力会克服水的压力将活塞向右推,当环形电磁铁到达干簧管 正下方时,由于磁化使得干簧管 接通,送入电信号至控制电路处理后,使水泵电动机与电源接通,水泵开始向储水箱内送水;当储水箱内的水位升高到某一位置
时,水的压力克服弹簧弹力将活塞向左推,当环形电磁铁到达干簧管 正下方时,由于磁化使得干簧管 接通,送入电信号至控制电路处理后,使水泵电动机与电源断开,水泵停止工作。
下列关于该控制装置描述不正确...
的是 ✌干簧管起到了干簧管继电器的作用
第 题图
第 题图
干簧管起到了磁敏传感器的作用
将干簧管 的位置向左移可以升高储水箱内最高水位的高度
将干簧管 的位置向右移可以降低储水槽内最低水位的高度
【加试题】小明想在家门口安装一只声控灯,晚上有声音时灯亮,白天有、无声音均不亮。
他设计了如下图所示的电路,各元件参数可根据实际情况调整和选用,以达到设
✌、 两点电位与☞点电位的逻辑关系表达正确的是
计要求,根据电路图,
✌☞✌ ☞✌ ☞AB A
☞ B
二、非选择题(本大题共 小题,第 小题 分,第 小题 分,第 小题 分,第 小题 分,共 分)
如图所示是一种果实采摘机器
人的结构示意图,它具有行走和采摘功
能,行走和采摘都可用无线遥控控制。
当机器人行走到采摘目标附近,先通过
人工判断果实是否成熟,若果实成熟,
则使用无线遥控装置操纵机器人动作,
让机器人中的夹持器摘取果实。
夹持器开合夹取的控制原理是:主控制器接收到无线遥控发出的指令,驱动机械臂上伺服电机 控制夹持器的张开和合并,使得夹持器能够完成采摘任务。
请回答以下问题:
第 题图
( )根据示意图及描述,分析夹持器开合夹取的控制过程。
如果把夹持器作为被控对象,则控制器是 ▲ ,执行器是 ▲ (①伺服电机 ;②电源;③主控制器;④伺服电机 中选择合适的选项,将序号填写在“ ▲ ”处);
( )把机器人看作一个系统,它又可分为夹持和行走子系统。
以下属于行走子系统的是 ▲ 、 ▲ 。
(在①履带;②主臂;③履带马达;④连杆中选择两项,将序号填写在“ ▲ 处);
( )机器人采用了履带,可以适应不同的地形,如山路、泥地等。
从系统的特性分析,说明该系统具有良好的 ▲ (①整体性;②环境适应性;③动态性;
④相关性中选择一项,将序号填写在“ ▲ ”处)。
.如图甲所示是一款大小可调的婴儿床。
婴儿床的长、宽、高的尺寸是可以调整的,都是通过大、小套筒套接的方式实现,其中高度方向的套筒截面形状及大小如图乙所示。
如果两套筒直接套接,拉伸时两套筒会被拉至脱开。
现在请你设计大、小两套筒间套接部分的结构,设计要求如下:
✌.套筒采用不锈钢材料,当调整到所需尺寸时,能保证两套筒间可靠连接(不要求任意长度的连续调整);
.拉伸到最大尺寸时,两套筒间的重合尺寸不小于 ❍❍;
.安装到床上后,尺寸调整时伸缩灵活、两套筒不会被拉至脱开;
.结构简单,调整方便,安全可靠。
甲 乙
请根据上述设计要求,完成以下任务:
( )两套筒间的重合尺寸不小于 ❍❍,主要是考虑♉♉♉♉▲♉♉♉♉(在①结构稳定性;②连接强度;③节省材料中选择一项,将序号填写在“♉♉♉♉▲♉♉♉♉”处);
( )画出两个套筒间套接部分的结构设计草图,必要时可用文字说明;
( )说明你的设计是如何实现拉伸时防止两套筒发生脱离的;
( )套筒装配后,为了检验其是否达到设计要求,以下试验中不需要的是♉♉♉♉♉♉♉(在①套筒伸缩调整的灵活性试验;②拉伸两套筒,观察是否会脱开的试验;
③两套筒反复装拆试验中选择一项,将序号填写在“♉♉♉♉▲♉♉♉♉”处)。
【加试题】补画组合体三视图中所缺的3条图线。
【加试题】如图♋所示是小张同学设计的灯的开关电路示意图。
合上开关 后,按下 后松开(电键功能:按下接通电路,松开后会弹起断开电路), ✞小灯泡点亮;再按下 后松开, ✞小灯泡熄灭。
请回答以下问题:
图 ♋
( )先合上开关 ,再按下电键 松开后三极管✞、✞和发光二极管✞的状态分析正确的是♉♉♉♉▲♉♉♉♉(在①✞导通,✞截止,✞点亮;②✞截止,✞导通,✞熄灭;③✞导通,✞导通,✞熄灭 中选择合适的选项,将序号填写在“♉♉♉♉▲♉♉♉♉❾处)( )为了实现 ✞小灯泡的点亮后能延时自动关闭,小张同学对电路进行了改进(如图♌),结果发现,合上开关,按下电键 松开后, ✞小灯泡能延时关闭,但是时间较短,合理的改进措施有♉♉♉♉▲♉♉♉♉、♉♉♉♉▲♉♉♉♉(在①增加电阻 的阻值;②增加电阻 的阻值;③增加电阻 的阻值;④增加电容 的电容量 中选择合适的两个选项,将序号填写在“♉♉♉♉▲♉♉♉♉❾处)
✌❒♏ ✡☐◆ ♦◆☐❒♓♦♏♎ ✍
图 ♌
图 ♌
( )为了实现 ✞小灯泡能在光照强度弱时自动点亮,光照强度强时自动熄灭,小张同学决定利用可变电阻和光敏电阻实现电路功能。
请在虚方框内连线补全电路,使连接后的电路能实现上述功能。
。