CDY-1型导向传感器的测量原理与计算
位移传感器的工作原理

位移传感器的工作原理标题:位移传感器的工作原理引言概述:位移传感器是一种用于测量物体位置变化的装置,广泛应用于工业自动化、机械创造、航空航天等领域。
本文将详细介绍位移传感器的工作原理,包括其基本原理、工作方式、应用场景和优势。
一、基本原理1.1 电容位移传感器电容位移传感器利用电容量的变化来测量物体的位移。
它由两个电极构成,当物体挨近电极时,电容量增加;当物体远离电极时,电容量减小。
传感器通过测量电容量的变化来确定物体的位移。
1.2 感应位移传感器感应位移传感器利用感应原理测量物体的位移。
它包含一个线圈和一个金属杆,当物体挨近线圈时,金属杆的电磁感应会导致线圈中的电流发生变化。
传感器通过测量电流变化来确定物体的位移。
1.3 光电位移传感器光电位移传感器利用光电效应测量物体的位移。
它由一个光源和一个光敏元件构成,当物体挨近光敏元件时,光敏元件接收到的光强度会发生变化。
传感器通过测量光强度的变化来确定物体的位移。
二、工作方式2.1 绝对位移传感器绝对位移传感器可以直接测量物体的绝对位置。
它们通常使用编码器或者光栅来实现,能够提供高精度和高分辨率的位移测量。
2.2 相对位移传感器相对位移传感器只能测量物体的相对位置变化。
它们通常使用差动变压器或者磁敏元件来实现,适合于需要监测物体相对运动的场景。
2.3 数字位移传感器数字位移传感器可以将位移信号转换为数字信号输出。
它们通常采用AD转换器将摹拟信号转换为数字信号,具有高精度和抗干扰能力。
三、应用场景3.1 机械创造位移传感器广泛应用于机械创造领域,用于测量机械零件的位移、位置和变形。
它们可以提供实时监测和反馈,保证机械系统的精度和稳定性。
3.2 自动化控制位移传感器在自动化控制系统中起着重要作用,用于测量和控制机器人、自动化设备和生产线的位移和位置。
它们可以实现精确的运动控制和定位。
3.3 航空航天位移传感器在航空航天领域被广泛应用,用于测量航空器和航天器的位移和变形。
KDY—1型四探针电阻率方阻测试仪.

KDY — 1 型四探针电阻率/方阻测试仪使用说明书广州市昆德科技有限公司1、概述KDY-1型四探针电阻率/方阻测试仪(以下简称电阻率测试仪)是用来测量半导体材料(主要是硅单晶、锗单晶、硅片)电阻率,以及扩散层、外延层、ITO导电薄膜、导电橡胶方块电阻的测量仪器。
它主要由电气测量部份(简称:主机)、测试架及四探针头组成。
本仪器的特点是主机配置双数字表,在测量电阻率的同时,另一块数字表(以万分之几的精度)适时监测全程的电流变化,免除了测量电流/测量电阻率的转换,更及时掌控测量电流。
主机还提供精度为0.05%的恒流源,使测量电流高度稳定。
本机配有恒流源开关,在测量某些薄层材料时,可免除探针尖与被测材料之间接触火花的发生,更好地保护箔膜。
仪器配置了本公司的专利产品:“小游移四探针头”,探针游移率在0.1〜0.2%。
保证了仪器测量电阻率的重复性和准确度。
本机如加配HQ-710E 数据处理器,测量硅片时可自动进行厚度、直径、探针间距的修正,并计算、打印出硅片电阻率、径向电阻率的最大百分变化、平均百分变化、径向电阻率不均匀度,给测量带来很大方便。
2、测试仪结构及工作原理测试仪主机由主机板、电源板、前面板、后背板、机箱组成。
电压表、电流表、电流调节电位器、恒流源开关及各种选择开关均装在前面板上(见图2)。
后背板上只装有电源插座、电源开关、四探针头连接插座、数据处理器连接插座及保险管(见图3)。
机箱底座上安装了主机板及电源板,相互间均通过接插件联接。
仪器的工作原理如图1所示:测试仪的基本原理仍然是恒流源给探针头(1、4探针)提供稳定的测量电流I (由DVM1监测),探针头(2、3 )探针测取电位差V (由DVM2测量),由下式即可计算出材料的电阻率:厚度小于4倍探针间距的样片均可按下式计算P + * WF SP F(W/S)F(S/D)Ft ⑴式中:V——DVM2的读数,mV。
I——DVM1 的读数,mA。
W――被测样片的厚度值以cm为单位。
CDY地磁导向仪
定向钻导向仪分类
1、无线导向仪器:有普通、有线、加强,3种。
2、有线导向仪器:DCI的SST(虽然也有自主的控向软件,也部分用到地磁数据,但是其根本受到限制,如:深度,距离等)
3、地磁导向仪器:华北基础的CDY有线地磁导向仪、CDY无线地磁导向系统、paratrack2(P2)、雪威MGS。
无线:
由接收机、同步显示器、发射棒和电池充电器等构成;
•探测深度和精度均易受周边
电磁等信号的干扰;
•通常适用于中短距离穿越及
市政道路穿越工程导向;
•控向深度一般在0‐15m
有线:
主要包括有线可发射电磁波的传感器、接收器、远程同步显示器、电源供应器、数据传递装置(数据线、碳刷、铜环)和拔插工具等构成;•适用于中距离穿越(主要解决电池容量);
•导向深度和精度与无线导向系统相同。
•一般可达到15m左右
地磁:
主系统由探棒、控向单元、电脑组成。
辅件包含上、下扶正器、分流器、延长棒、接线柱等。
耗材包括压线钳、剥线钳、铜接头、6平方
控向线,热缩套管、钳型直流电表、人工磁场线圈等。
配套件有无磁钻铤、无磁导向短节和无磁造斜短节及钻头等,有些地质还需要泥浆马达。
•控向的范围、深度、精度等均大大超过了无线和“有线”系统;(理论上是不受距离与深度的影响)
•在信号干扰大、导向轨迹深度大、不可跟测区域长的工程可以选择此方法.。
位移传感器的工作原理

位移传感器的工作原理
电阻式位移传感器是最早被广泛应用的一种位移传感器。
它们是由一
根金属线绕在一根细长的电绝缘丝上构成的。
金属线上的电阻与位置成正比。
当物体移动时,导线的长度将发生变化,从而改变电阻的值。
通过测
量电阻的变化,可以确定物体的位移。
电容式位移传感器是基于电容变化的原理工作的。
它们由一个固定电
容板和一个浮动电容板组成。
固定电容板与物体相连,浮动电容板与感兴
趣的物体相连。
当物体移动时,浮动电容板的位置将发生变化,从而改变
了电容值。
通过测量电容的变化,可以得知物体的位移。
激光位移传感器是利用激光束的干涉原理来测量物体位移的。
这种位
移传感器包括一个激光源和一个接收器。
激光束在物体上形成一个光栅,
当物体移动时,光栅的形状将发生变化,导致激光束在接收器上形成干涉
图案。
通过分析干涉图案的变化,可以得到物体的位移信息。
光栅位移传感器是一种使用光栅来测量物体位移的传感器。
光栅位移
传感器由一个光源和一个接收器组成。
光栅具有平行的光栅线。
当物体移
动时,光栅线将被遮挡或透过,从而改变光的强度。
通过测量光强的变化,可以确定物体的位移。
总的来说,位移传感器的工作原理是通过测量其中一种物理量的变化
来确定物体的位移。
每种位移传感器都有各自的利弊和适用范围。
选取合
适的位移传感器取决于具体的应用需求和测量精度要求。
l型探针原理

l型探针原理
L型探针的原理主要基于电磁感应和电感、电容的相互作用。
L型探针通常由两部
分组成,一部分与辐射片垂直,等效为电感;另一部分与辐射片平行,其与辐射片之间的缝隙等效为电容。
通过适当地调整L型探针的尺寸,可以抵消由Part1引入的感抗,显著地扩展微带天线的阻抗带宽。
L型探针在微带天线小型化技术中也起着重要作用。
对辐射贴片进行开槽可以改变
贴片表面电流的路径,增大天线有效长度,降低天线的谐振频率,从而实现天线小型化。
传感器原理及应用 第六章
磁阻最小
磁阻最大
输出感应电势相差1800 无外加扭矩时,=0,两个幅值、频率均相等,相 位差0=1800的感应电势 轴上感受扭矩时,产生扭转角,设传感器内外 齿数均为n,则扭转角与感应电势相位差0的关系为: 0=n 0 测量电路 时间差 脉冲信号(宽度 0) 指示仪表 读出被测扭矩
输出量 感应电势
x(t ) (t ) RM L 测量电路 电压或电流
命名:电感(变磁阻)式位移传感器 分类:结构型、能量控制型
1.
振动测量
CD-1型是绝对式传感器:
CD-2型相传感器+传感器轴+磁电式传感器
定子的齿顶与转子的齿顶相对 定子的齿根与转子的齿顶相对
线圈和磁铁不动,由运动着的导磁 材料的物体改变磁路的磁阻,引起磁 力线增加或减弱,使线圈产生感应电 势。
磁阻式磁电传感器也可做成测线速度的,其原理图为:
其变换链:
dRM dx(t ) d (t ) d v(t ) e出 dt dt dt dt
命名:磁电式速度传感器 分类:结构型、能量转换型
磁电式传感器是基于电磁感应原理的传感器。
根据电磁感应定律可得:
d e N dt
即回路中产生的感应电 势与磁通量对时间的变化律 成正比。
线圈-磁铁活动型 衔铁活动型
动圈式—线圈移动 动磁式—磁铁移动
磁阻式 衔铁移动,磁阻变化
导线在磁场中作切割磁 力线运动,导线产生的电 场值为
e NBlv sin
对于线速度型
dx e NBl sin dt
N 线圈匝数 B 磁场强度 l 单匝线圈有效长度 dx/dt 线圈与磁场的相对运动速度 运动方向与磁场方向夹角
CJY—1G前向散射能见度仪的原理分析
CJY—1G前向散射能见度仪的原理分析作者:代华龙来源:《中国科技纵横》2014年第08期【摘要】随着气象业务体制改革的不断深入,以前人工估测的能见度气象要素改为自动化仪器观测,洛阳凯迈(环测)公司生产的CJY-1G型前向散射能见度仪作为一种智能化的新一代大气能见度监测设备,2013年在气象台站装备较多,本文分析了该型仪器的工作原理和内部结构,以期给用户工作中参考。
【关键词】 CJY-1G能见度仪原理组成维护能见度(Visibility),是反映大气透明度的一个指标,在气象学中,能见度用气象光学视程表示。
气象光学视程是指白炽灯发出色温为2700K的平行光束的光通量,在大气中削弱至初始值的5%所通过的路径长度。
能见度和当时的天气情况密切相关。
当出现降雨(雪)、雾、霾、沙尘暴等天气过程时,大气透明度较低,因此能见度较差。
测量大气能见度一般可用目测的方法,但是,能见度的估计受许多主观的和物理的因素的影响,近年来,随着气象业务体制改革的不断深入和服务的需要,我国大部分气象台站都安装了能见度仪,基本实现了能见度的自动化观测。
目前大气能见度探测仪主要有透射式能见度仪(测量水平空气柱的消光系数或透射因数。
光的衰减是由沿光束路径上的微粒散射和吸收造成的)和散射式能见度仪(测量小体积空气对光的散射系数。
在自然雾中,吸收通常可忽略,散射系数可视作与消光系数相同)。
其中散射式能见度仪中的前向散射仪应用最为广泛。
CJY-1G型前向散射能见度仪作为一种智能化的新一代大气能见度监测设备,2013年在气象台站装备较多,它具备能见度观测和背景光测量功能。
下面主要介绍这种能见度仪的原理与结构。
1 CJY-1G能见度仪工作原理散射能见度仪通过测量散射系数从而估算出气象光学视程。
大气中光的衰减是由散射和吸收引起的,在一般情况下,吸收因子可以忽略,而经由水滴反射,折射或衍射产生的散射现象是影响能见度的主要因素。
故测量散射系数的仪器可用于估计气象光学视程(MOR)。
i型力传感器工作原理
i型力传感器工作原理I型力传感器是一种常见的力传感器,广泛应用于各个领域。
它的工作原理是通过测量物体所受到的力来获取相应的电信号输出。
I型力传感器的核心部件是应变片。
应变片是一种特殊的金属片,具有一定的弹性。
当外界施加力于物体上时,物体会发生形变,应变片也会跟随发生形变。
这种形变会导致应变片的电阻值发生变化。
为了测量这种电阻值的变化,I型力传感器通常采用了一个电桥电路。
电桥电路是由四个电阻组成的,其中一个电阻是应变片,其他三个电阻是已知的固定电阻。
当外界施加力于物体上时,应变片的电阻值发生变化,导致电桥电路中出现电压差。
这个电压差可以通过测量电桥电路两个节点之间的电压来获取。
通常情况下,I型力传感器的输出信号是一个模拟信号。
这个模拟信号的大小与物体所受到的力成正比。
为了将这个模拟信号转换为数字信号,I型力传感器通常会使用一个模数转换器(ADC)。
模数转换器可以将模拟信号转换为数字信号,以便于计算机或其他数字设备进行处理。
除了测量力的大小,I型力传感器还可以通过测量力的方向来确定物体所受到的力的方向。
这是因为I型力传感器通常会使用多个应变片,这些应变片的位置和方向不同,从而可以测量力的方向。
在实际应用中,I型力传感器有许多优点。
首先,它的测量范围广泛,可以测量微小的力,也可以测量大范围的力。
其次,它的响应速度快,可以实时测量物体所受到的力。
此外,I型力传感器体积小,重量轻,易于安装和使用。
然而,I型力传感器也存在一些局限性。
首先,由于应变片的材料和结构限制,它在测量力时可能会受到应变片的非线性影响,导致测量结果的误差。
此外,I型力传感器的温度特性也可能会影响其测量精度。
因此,在实际应用中,需要根据具体情况选择合适的I 型力传感器,并进行校准和温度补偿。
总结起来,I型力传感器是一种常见的力传感器,通过测量应变片的电阻值变化来获取物体所受到的力。
它的工作原理是基于电桥电路和应变片的特性。
I型力传感器具有测量范围广泛、响应速度快、体积小等优点,但也存在非线性和温度特性的影响。
实验四肺通气功能测定

实验四肺通气功能测定肺通气功能测定是一项常用的临床检测手段,用于评估肺通气功能的正常与异常。
通过对呼吸机械参数的测定和分析,可以了解肺通气的状态,并帮助医生做出准确的诊断和治疗方案。
本实验将介绍肺通气功能测定的原理、方法及数据分析。
一、实验目的1.了解肺通气功能测定的原理和重要指标;2.掌握肺通气功能测定的方法和步骤;3.学会对测定结果进行数据分析和解读。
二、实验原理肺通气功能测定是通过呼吸机械参数的测定和分析来评估肺通气功能的正常与异常。
常见的肺通气功能测定参数包括:呼气末正压(PEEP)、总动态肺顺应性(Cdyn)、呼吸系统顺应性(Crs)、气道阻力(Raw)等。
呼气末正压(PEEP)是指在呼气末期保持的一定正压,用于防止肺泡在呼气时萎陷。
正常情况下,呼气末正压为0,但在一些疾病和手术后可能需要使用PEEP来维持肺泡的开放性。
总动态肺顺应性(Cdyn)是评价肺和胸壁的弹性特性的指标,反映了肺组织和胸壁的弹性变化。
Cdyn的单位为ml/cmH2O,正常值范围为40-60 ml/cmH2O。
Cdyn的降低可能与肺部纤维化、肺水肿等疾病相关。
呼吸系统顺应性(Crs)是指肺和胸壁总体的弹性特性,包括了肺顺应性和胸壁顺应性。
Crs的单位为ml/cmH2O,正常值范围为50-100ml/cmH2O。
Crs的降低可能与胸腔积液、肺部炎症等疾病相关。
气道阻力(Raw)是衡量气道通畅程度的指标,单位为cmH2O/L/s。
气道阻力的升高可能与气道狭窄、气道炎症等情况相关。
三、实验方法1.实验前准备(1)检查呼吸机的工作状态,保证呼吸机正常工作;(2)准备好呼吸机所需的气体源和各种传感器。
2.连接呼吸机和患者(1)将气管插管或气道导管连接到患者的呼吸机接口上;(2)调整好患者的体位,保持舒适。
3.设置呼吸机参数(1)设置控制模式和通气模式,如压力控制模式和辅助控制呼吸模式;(2)调整吸气压力、呼气压力、吸呼气比等参数。
YSI 电磁感应电导度测试器说明书
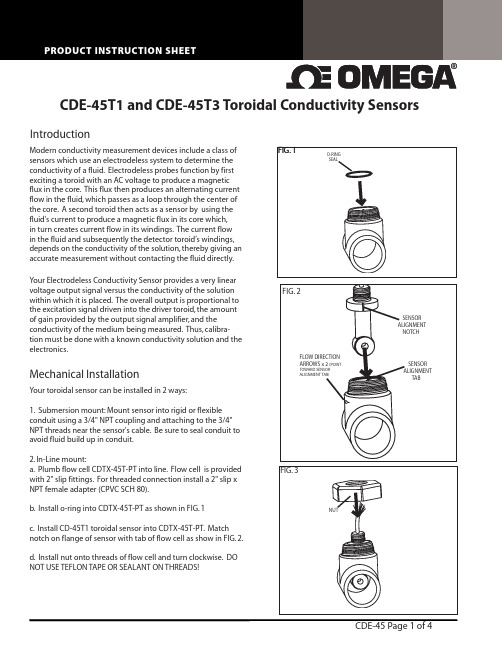
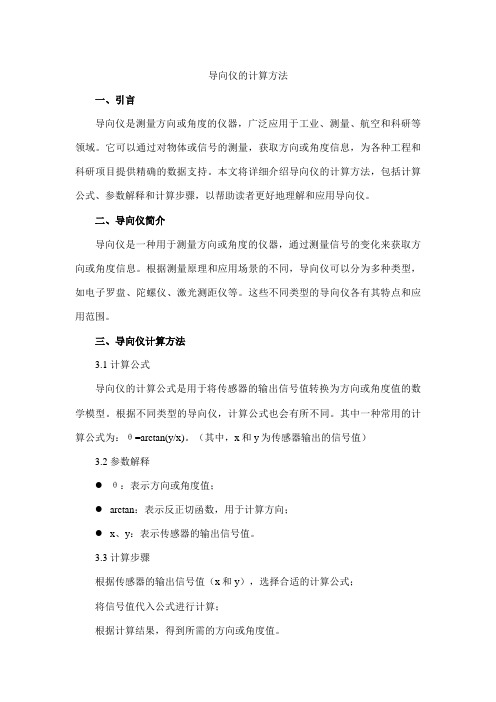
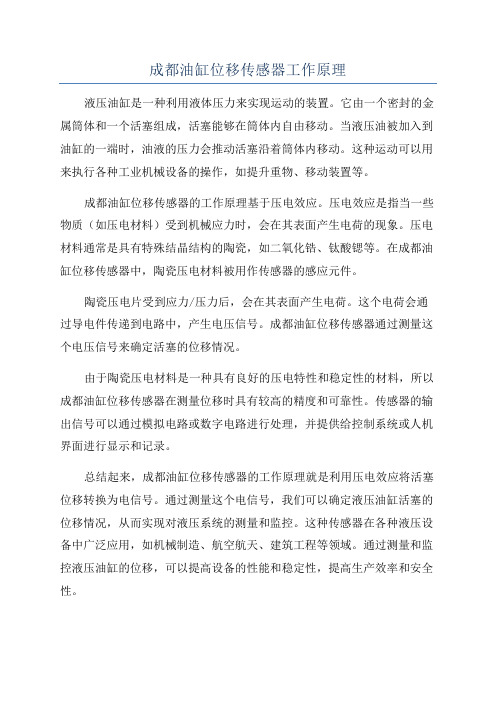
CDE-45T1 and CDE-45T3 Toroidal Conductivity Sensors IntroductionModern conductivity measurement devices include a class of sensors which use an electrodeless system to determine the conductivity of a fluid. Electrodeless probes function by first exciting a toroid with an AC voltage to produce a magnetic flux in the core. This flux then produces an alternating current flow in the fluid, which passes as a loop through the center of the core. A second toroid then acts as a sensor by using the fluid’s current to produce a magnetic flux in its core which,in turn creates current flow in its windings. The current flowin the fluid and subsequently the detector toroid’s windings, depends on the conductivity of the solution, thereby giving an accurate measurement without contacting the fluid directly. Your Electrodeless Conductivity Sensor provides a very linear voltage output signal versus the conductivity of the solution within which it is placed. The overall output is proportional to the excitation signal driven into the driver toroid, the amount of gain provided by the output signal amplifier, and the conductivity of the medium being measured. Thus, calibra-tion must be done with a known conductivity solution and the electronics.Mechanical InstallationYour toroidal sensor can be installed in 2 ways:1. Submersion mount: Mount sensor into rigid or flexible conduit using a 3/4" NPT coupling and attaching to the 3/4" NPT threads near the sensor's cable. Be sure to seal conduit to avoid fluid build up in conduit.2. In-Line mount:a. Plumb flow cell CDTX-45T-PT into line. Flow cell is provided with 2" slip fittings. For threaded connection install a 2" slip x NPT female adapter (CPVC SCH 80).b. Install o-ring into CDTX-45T-PT as shown in FIG. 1c. Install CD-45T1 toroidal sensor into CDTX-45T-PT. Match notch on flange of sensor with tab of flow cell as show in FIG. 2.d. Install nut onto threads of flow cell and turn clockwise. DO NOT USE TEFLON TAPE OR SEALANT ON THREADS!FIG. 3NUTSensor WiringThe probe has 9 total leads (see FIG. 4).The driver toroid is connected to the red and black leads with the red shrink tubing around them. When using the probe with various controllers, it is important that the red lead be connected to an AC DRIVER or VOLTAGE IN position while the black lead is connected to a GROUND or DRIVER RETURN line.The detector toroid is connected to the white and black leads with the white shrink tubing around them. The white lead is typically connected to the SIGNAL IN location and the black lead is connected to a GROUND or SIGNAL RETURN line.The temperature element is connected to the green and black leads with the green shrink tubing around them. Connect these to the TEMPERATURE INPUT locations. The polarity is not important.The 3 bare leads, which supply individual pair shielding throughout the cable, should typically be connected to aground or drain line. Note: The shield leads are not connected to one another, they are all individual shields for the three bundles of wires.Refer to your controller manual for specific wiring details.Cable ConsiderationsThe cable uses PVC to protect the wires during use. If the cable comes in contact with the working fluid, the temperature and pressure ratings must be adjusted to allow for the lower tem-perature limits of the cable. The cable can withstand 105 deg C (DRY) but should only be subjected to 70 deg C when im-mersed in a fluid. The jacket becomes significantly weakened by liquid (raising the possibility of shorting) and all attempts should be made to keep the cable out of the fluid environ-ment. Do not run cable in the same conduit with any other A.C. power wiring nor routed close to any high current demanding equipment. Seal conduit to avoid build-up of moisture. Do not cut cable. Shorter or longer cables can be provided. C D E -4 5 T 1After the sensor is properly connected, the system shouldbe calibrated. The typical calibration procedure uses a “low” and a “high” known standard conductivity solution. The "low" solution is often DI water or air and is used to calibrate the zero point of the controller. Plotting these two points will cre-ate a straight line, which can be used to find the conductivity valueof any solution in the range. Make sure probe is im-mersed in the calibration fluid such that the toroids are totally submerged. A sample plot is provided in FIG. 5 to show the approximate values, which will be encountered during calibra-tion. Note: The values in the plot are arbitrary, each probe will require unique linear equation values.If the sensor is to be used in a submersion application, cali-brate the sensor in a large glass or plastic beaker with all sides of the sensor at least one inch away from the wall(FIG. 6). If the production installation is a pipe (plastic or metal), calibration should be performed in a similar pipe arrangement. All Electrodeless (Toroidal) sensors have a wall effect, which must be taken into account during calibration. If the non-con-ductive (plastic) wall is within 1 inch of the sensor, the sensor’s reading will be reduced due to the insulator interaction with the current path. If the sensor is within 1 inch of a conductive (metal) wall, the sensor’s reading will be increased due to the shorting effect of the conducting wall. These wall effects can be calibrated out of the system by simulating the application’s mounting configuration. A plot showing the effects of insulat-ing and conducting walls on the output can be seen in FIG.7. During calibration and production installation (especially ina submersion environment), it is important to dislodge anyair bubbles, paying special attention to the center hole of the toroids. Also make sure toroids are totally covered with fluid when calibrating (FIG. 6).Please refer to your controller's manual for specific calibration instructions.Sensor CalibrationSensor MaintenanceThe major advantage of the Electrodeless (Toroidal) Sensoris almost no maintenance is required. The only maintenance required during normal operational life of the sensor is to prevent the toroidal opening from being plugged with debris. Use a soft brush or rag to remove any debris in the core open-ing. If that does not work, try a mild detergent or weak acid (5-10% HCl).Sensor TroubleshootingFIG. 8。
导向仪的计算方法
导向仪的计算方法一、引言导向仪是测量方向或角度的仪器,广泛应用于工业、测量、航空和科研等领域。
它可以通过对物体或信号的测量,获取方向或角度信息,为各种工程和科研项目提供精确的数据支持。
本文将详细介绍导向仪的计算方法,包括计算公式、参数解释和计算步骤,以帮助读者更好地理解和应用导向仪。
二、导向仪简介导向仪是一种用于测量方向或角度的仪器,通过测量信号的变化来获取方向或角度信息。
根据测量原理和应用场景的不同,导向仪可以分为多种类型,如电子罗盘、陀螺仪、激光测距仪等。
这些不同类型的导向仪各有其特点和应用范围。
三、导向仪计算方法3.1 计算公式导向仪的计算公式是用于将传感器的输出信号值转换为方向或角度值的数学模型。
根据不同类型的导向仪,计算公式也会有所不同。
其中一种常用的计算公式为:θ=arctan(y/x)。
(其中,x和y为传感器输出的信号值)3.2 参数解释●θ:表示方向或角度值;●arctan:表示反正切函数,用于计算方向;●x、y:表示传感器的输出信号值。
3.3 计算步骤根据传感器的输出信号值(x和y),选择合适的计算公式;将信号值代入公式进行计算;根据计算结果,得到所需的方向或角度值。
在实际应用中,导向仪的计算过程需要考虑到传感器精度、环境因素和误差补偿等因素,以确保测量结果的准确性和可靠性。
四、导向仪的分类根据测量原理和应用场景的不同,导向仪可以分为多种类型。
以下是几种常见的导向仪分类:1.按测量原理分类:可以分为电子罗盘、陀螺仪、激光测距仪等类型。
2.按应用场景分类:可以分为航向仪、姿态仪、水平仪等类型。
3.按信号输出分类:可以分为模拟输出和数字输出两种类型。
模拟输出的导向仪通常需要经过信号处理和转换才能得到精确的角度值,而数字输出的导向仪则可以直接输出角度值。
4.按精度分类:可以分为高精度、中精度和低精度三种类型。
高精度的导向仪通常用于科研和精密测量领域,而低精度的导向仪则适用于一般工程和消费电子产品等领域。
成都油缸位移传感器工作原理
成都油缸位移传感器工作原理
液压油缸是一种利用液体压力来实现运动的装置。
它由一个密封的金属筒体和一个活塞组成,活塞能够在筒体内自由移动。
当液压油被加入到油缸的一端时,油液的压力会推动活塞沿着筒体内移动。
这种运动可以用来执行各种工业机械设备的操作,如提升重物、移动装置等。
成都油缸位移传感器的工作原理基于压电效应。
压电效应是指当一些物质(如压电材料)受到机械应力时,会在其表面产生电荷的现象。
压电材料通常是具有特殊结晶结构的陶瓷,如二氧化锆、钛酸锶等。
在成都油缸位移传感器中,陶瓷压电材料被用作传感器的感应元件。
陶瓷压电片受到应力/压力后,会在其表面产生电荷。
这个电荷会通过导电件传递到电路中,产生电压信号。
成都油缸位移传感器通过测量这个电压信号来确定活塞的位移情况。
由于陶瓷压电材料是一种具有良好的压电特性和稳定性的材料,所以成都油缸位移传感器在测量位移时具有较高的精度和可靠性。
传感器的输出信号可以通过模拟电路或数字电路进行处理,并提供给控制系统或人机界面进行显示和记录。
总结起来,成都油缸位移传感器的工作原理就是利用压电效应将活塞位移转换为电信号。
通过测量这个电信号,我们可以确定液压油缸活塞的位移情况,从而实现对液压系统的测量和监控。
这种传感器在各种液压设备中广泛应用,如机械制造、航空航天、建筑工程等领域。
通过测量和监控液压油缸的位移,可以提高设备的性能和稳定性,提高生产效率和安全性。
潮州工业磁尺式位移传感器工作原理

潮州工业磁尺式位移传感器工作原理
潮州工业磁尺式位移传感器的工作原理基于霍尔效应和磁致伸缩效应。
霍尔效应是指当磁场与导体中的电流垂直时,导体中的电子会受到一个垂
直于两者的力的作用,并产生一个电势差。
磁致伸缩效应是指在磁场的作
用下,磁致伸缩材料会发生尺寸的变化。
在使用过程中,潮州工业磁尺式位移传感器的磁尺被固定在测量物体上。
当测量物体发生位移时,磁尺也相应地发生位移。
此时,传感器通过
感应霍尔元件受到由磁尺上的磁片产生的磁场的影响,从而测量出与磁尺
的相对位置。
具体来说,当磁尺上的磁片与传感器之间的距离发生变化时,磁场的
强度也会发生变化。
传感器中的霍尔元件能够感知到这种变化,并将其转
化为电信号输出。
通过测量电信号的变化,可以准确地确定测量物体的位移。
潮州工业磁尺式位移传感器的工作原理基于霍尔效应和磁致伸缩效应,因此具有高精度和灵敏度的特点。
它的测量范围通常较大,可达到几十毫
米到几米,且工作稳定可靠。
同时,由于传感器与测量物体之间没有直接
接触,因此能够在高温、高湿、腐蚀等恶劣环境下工作。
总之,潮州工业磁尺式位移传感器的工作原理是基于霍尔效应和磁致
伸缩效应的。
它通过测量磁尺上磁片与传感器之间的距离变化,来确定物
体的位移。
该传感器具有高精度、高灵敏度和可靠性好的特点,被广泛应
用于工业领域中的位移测量。
成都位移测量磁尺传感器工作原理
成都位移测量磁尺传感器工作原理
成都位移测量磁尺传感器是一种新型的测量仪器,用于测量距离和位移的变化。
它的工作原理是由磁场组成的传感器把距离变化信号转换成可以被记录、显示或被计算机控制的电学信号。
磁尺测量系统由一个固定在机器中的磁尺把读数传输到记录仪或显示器上,读数可以被记录或显示出来。
磁尺传感器由一对对调磁铁、一个测量电路和一个记录仪组成。
把磁铁组装在一个机架上,形成一个固定的磁场。
磁铁之间由一条精密的铁丝紧固在一起,形成一个精确的裂缝,以保证精确的测量。
在磁铁的两端,铁丝的紧固度可以调节,以灵活的改变裂缝的宽度。
当物体在测量系统中移动时,磁铁会变化磁场,在磁尺上形成一个可以识别的电路,在测量电路中会有一个电容器来检测这个变化。
电容器会根据磁场变化从电源收集电荷,并分析磁场变化的大小,把这些信息传输到记录仪或显示器上。
记录仪或显示器可以接收和显示磁尺读数,并把它们转换成相应的位移数据,记录仪使用可以电脑软件进行读取储存和绘图分析,以获得准确的位移和位移变化状态。
成都位移测量磁尺传感器具有安全可靠、精度高、响应速度快、操作简便等优点,使用范围广泛,可用于土木工程、轿车、冷却塔、机械加工中心、高层建筑等领域的位移检测,获得行业的普遍认可。
总之,成都位移测量磁尺传感器的准确性、灵敏度、可靠性和可操作性都使其在各个领域得到了广泛应用,它可以用来检测和测量机
械、电子产品、精密仪表和自动化设备的位移变化,实现自动控制和监控。
成都油缸磁尺伸缩位移传感器工作原理
成都油缸磁尺伸缩位移传感器工作原理成都油缸磁尺伸缩位移传感器由两部分组成:磁性材料和感应元件。
磁性材料通常被安装在液压缸的活塞上,而感应元件则被固定在油缸外部。
当液压缸活塞位移发生改变时,磁性材料随之移动,从而改变了感应元件周围的磁场强度。
具体来说,成都油缸磁尺伸缩位移传感器利用了磁体的磁感应线圈效应。
通过在感应元件周围放置一个线圈,当磁性材料随着液压缸活塞的伸缩而移动时,磁场线圈感应到的磁感应强度也会发生改变。
磁性材料的运动导致了磁感应的变化,这个变化通过感应元件的磁感应线圈被转化为电信号。
磁性材料的移动和磁场强度的变化之间存在着一种线性关系,因此可以通过测量感应元件输出的电信号来确定液压缸活塞的位移。
成都油缸磁尺伸缩位移传感器具有一些优点。
首先,它可以测量高精度的位移,可以实现毫米级的测量精度。
其次,由于磁性材料可以直接与液压缸活塞结合在一起,因此不需要任何外部机械安装,从而提高了测量的可靠性和稳定性。
此外,它也不受液压缸内部环境的影响,如高温、高压等。
然而,成都油缸磁尺伸缩位移传感器也存在一些局限性。
首先,由于磁性材料的位移范围有限,因此传感器的测量范围也相对较小。
此外,磁性材料和感应元件之间的耦合关系也会受到外部因素的影响,例如温度变化和机械振动等,这可能会导致测量精度的下降。
总结而言,成都油缸磁尺伸缩位移传感器是一种常用于测量液压缸活塞位移的传感器。
它的工作原理是基于磁性材料随位移改变而产生的磁场变化,通过感应元件感应并转化为电信号进行位移测量。
虽然存在一些局限性,但成都油缸磁尺伸缩位移传感器仍然具有精确、可靠和稳定的测量性能。
成都高精度直线位移传感器工作原理

成都高精度直线位移传感器工作原理成都高精度、高稳定性的直线位移传感器,是一种用来测量和控制直线位移的传感器。
它是由一系列精确结构组成,可以测量被测物体在直线方向上的位移,以及位移变化量。
它能够满足各种复杂应用需求,如自动化系统中的机械飞行和机械检测,可以满足高精度要求。
直线位移传感器的结构主要包括以下部分:传感器本体、放大器、测量变压器、磁力变压器、磁屏蔽器、编码器、滚筒和驱动装置。
每一部分都有相应的功能,并且全部工作在一起,以实现直线位移测量的高精度和高稳定性。
下面我们来详细看看每一部分的具体工作原理。
传感器本体是直线位移传感器的核心模块,其由多个精密的滑轮和加速度传感器组成,能够测量测量物体位移和位移变化量。
放大器的作用是放大传感器的返回信号,并将这些信号转换为可视的,可以直观地看到。
测量变压器是一种电感器,由一个电磁绕组和一个负载绕组组成,能够检测传感器本体所释放出来的位移信号,把位移信号转换为可操作的电信号。
磁力变压器也称磁力器,是一种专门用于测量磁场强度的传感器。
它可以通过检测传感器本体内部各个部件的电磁场强度,一起测量测量物体的位移。
磁屏蔽器的作用是将电磁场产生的干扰降低到可接受的程度,以提高测量的精度。
编码器是一种编码装置,由一堆编码片和其他部件组成,可以通过外力引起物体位移时,检测测量物体的位移量,并将其转换为可操作的电信号。
滚筒是一种有结构的部件,可以根据滚筒内部的磁铁移动,检测测量物体的位移量,并将其转换为可操作的电信号。
最后,驱动装置的作用是将这些信号转换为可控制的电动驱动脉冲,以实现自动控制。
通过以上的讲解,我们可以知道成都高精度的直线位移传感器是一种由多个部件和结构组成的高精度、高稳定性的测量装置,它可以满足自动化系统中的复杂应用需求,具有高精度、可靠性和良好的可靠性,能够实现直线位移测量的高精度和高稳定性。
经过长期的发展,成都高精度的直线位移传感器已经成为测量和控制直线位移的重要工具之一,为自动化系统的研究和开发提供大量的信息。
导向仪工作原理
导向仪工作原理导向仪工作原理什么是导向仪?导向仪(Gyroscope),是一种用于测量旋转和方向改变的设备。
它通常由旋转传感器和信号处理器组成,被广泛应用于惯性导航系统、航天器、航空器、汽车和移动设备等领域。
导向仪工作原理导向仪的工作原理基于陀螺效应,即物体在旋转时会产生反向力的现象。
下面我们将从其基本构成和工作流程两个方面来详细解释导向仪的工作原理。
基本构成导向仪通常由以下几个基本部分组成:•旋转传感器:用于感知物体的旋转角度和速率。
最常见的旋转传感器包括机械陀螺仪、磁性陀螺仪和光纤陀螺仪等。
•信号处理器:用于处理旋转传感器收集到的数据,并转换为可用的数字信号。
信号处理器通常包括放大器、滤波器和模数转换器等。
工作流程导向仪的工作流程如下:1.旋转传感器感知旋转。
当导向仪所在的物体发生旋转时,旋转传感器会感知到其旋转的角度和速率。
2.传感器输出信号。
旋转传感器将感知到的旋转信息转化为电信号,并输出给信号处理器。
3.信号处理。
信号处理器接收传感器输出的电信号,并对其进行放大、滤波和模数转换等处理。
4.数字信号输出。
信号处理器将处理后的电信号转换为数字信号,并输出给外部设备进行进一步处理或显示。
导向仪的应用导向仪通过测量旋转和方向改变,可以在许多领域中发挥重要作用。
以下是一些常见的导向仪应用:•惯性导航系统:导向仪可用于测量飞机、船舶等载体的方向和姿态,并帮助其进行定位和导航。
•航天器:导向仪可用于控制和稳定航天器的姿态,确保其按照设计轨道运行。
•航空器:导向仪可用于飞机的自动驾驶系统,实现姿态稳定和自动修正。
•汽车:导向仪可用于车辆的稳定控制系统,提供精确的车辆姿态信息。
•移动设备:导向仪可用于智能手机、平板电脑等移动设备的姿态感知,实现自动旋转屏幕等功能。
总结导向仪通过利用陀螺效应来测量旋转和方向改变,为很多领域的应用提供了重要的技术支持。
它的工作原理基于旋转传感器的感知和信号处理器的处理,通过流程化的工作流程实现对旋转信息的准确测量和输出。
导向仪原理
导向仪原理导向仪是一种常见的测量仪器,它主要用于测量和控制机械系统中的方向和位置。
导向仪的原理是基于一些重要的物理原理和工程技术,它的设计和工作原理对于各种工业和科学应用都有重要的意义。
在本文中,我们将深入探讨导向仪的原理,以便更好地理解这一关键设备的工作原理和应用。
首先,导向仪的原理基于惯性导航和惯性测量。
惯性导航是一种利用惯性定律来测量和控制运动方向和位置的技术。
导向仪通过测量物体的加速度和角速度来推断其运动状态,从而实现对方向和位置的测量和控制。
这种原理基于牛顿运动定律和欧拉运动方程,通过精密的惯性传感器和信号处理技术来实现。
其次,导向仪的原理还涉及到电磁感应和磁场测量。
许多导向仪采用磁感应原理来测量地球磁场的方向和强度,从而确定物体的方向和位置。
这种原理基于法拉第感应定律和磁场测量技术,通过精密的磁场传感器和信号处理电路来实现对地球磁场的测量和分析。
此外,导向仪的原理还包括了光学测量和激光技术。
一些高精度的导向仪采用光学原理来测量物体的方向和位置,通过激光干涉和光学测距技术来实现对物体运动状态的测量和控制。
这种原理基于光的传播定律和干涉测量技术,通过精密的光学传感器和激光器来实现对物体运动状态的高精度测量。
最后,导向仪的原理还涉及到信号处理和控制算法。
导向仪通过采集和处理各种传感器的信号,利用复杂的控制算法来实现对物体运动状态的测量和控制。
这种原理基于信号处理技术和控制理论,通过高性能的处理器和控制器来实现对导向仪系统的实时监测和控制。
综上所述,导向仪的原理涉及多种物理原理和工程技术,包括惯性导航、电磁感应、光学测量和信号处理。
这些原理的综合应用使得导向仪能够实现对物体方向和位置的高精度测量和控制,广泛应用于航空航天、船舶、车辆和机械设备等领域。
通过深入理解导向仪的原理,我们可以更好地应用和改进这一关键设备,推动科学技术的发展和工程应用的进步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为了方便计算我们约定如下 : () 1 、钻进方位角 f t . ——表示导向传感器顺时 针偏 离磁 北 的角 度 。
() 2 、俯 仰 角 1—— 为 了方 便 公 式 的 推 导 、 3 计
算, 首先约定 B为仪器轴与铅垂线的夹角。 在工程 计算 中 B角减 9 。 , O 以水平 面为 0 , 。 高于水平 面 为正 , 于水 平 面为 负 。 低
第 1 期
21 0 0年 4月
非 开 挖 技 术
Tr nc e s Te hno o e hls c l gy
No. 1
Ap .2 0 r,01
3 1
OD 一 Y 1型导 向传 感器 的测量原 理与计算
朱 永 光
( 南华北 工程技 术有 限公 司 , 南郑 州 ) 河 河
Y
向传感器坐标系 x Y z可以认为相对于大地坐标 、、 系 X 、 oZ 经 过旋转 而得 到 。 计算 过程 中 , oY 、o 在 首先
以z 0轴 为轴 心 逆 时针 旋 转 ( 位角 ) 换 成 坐 方 变
标 系 X1Y1Z 。 、 、 1
Z
X
Y = , s + ,n 2 Yc f Z s f ol i1
( )导向传感器坐标系 x Y z 由导 向传感器 5、 、 、,
轴 线 方 向 Z 1 探 头 Y方 向 , ,号 2号探 头 x方 向 , 并 且确 保三轴 正交 示于 图 2 。 如果人 为 地将 两个 坐 标 系重 合 , x 对 应 x, 则 o Y 对应 Y,0 o z 对应 Z 当导 向传 感器 改变姿 态 时 , 。 导
摘 要 : 文简要 论述 了 c 一1 线地磁 导 向仪 的导 向传 感器 , 用地球 的重力场和地磁 场作为参 本 DY 有 利
考 系 , 用 惯 性 器 件进 行 测 量 的 基 本 测 量 原 理 和 计 算 方 法 。 采
关键词 : 力场、 磁场 、 维坐标 系 重 地 三
1 概 述
感 器 坐标 系 中 , 个测 量轴 放 置一 组 敏感元 件 。 每
采 用 重 力计 和 磁 力计 组 成 的导 向传 感 器 , 量 测 原 理基 于重 力 场 和地 磁 场 , 且 以重 力 场 和 地磁 场 并 为 基 准建 立 一 个 参 考 坐 标 系 即 大 地 坐 标 系 如 图 1 所示 , 以三 维正 交 安 装 的重 力 计 和磁 力 计 建 立测 量 坐标 系 即导 向传 感 器坐 标 系如 图 2所示 。
]㈥
L 『 0 ● _ 1
X1
s f o s ] s i I = cf n 0 l f l
l -if off s l s 0 n c l
0] l
精确 , 定 向穿越 工程 中具 有 广泛 的应用 前景 。 在
感器与钻具是 固定安装 的, 因此导向传感器的工具 面 角 、 进 方 位角 和 钻进 俯 仰 角 就是 导 向钻具 的工 钻
具 面角 、 进方 位 角和 钻进俯 仰 角 。 钻
3 计算方法
Y 前 面我 们 已 经建 立 了 以 重 力 场 和 地 磁 场 为 基
在 长 距 离 、 深 度 导 向 钻 进 施 工 中 , 在 常 用 大 现
Z O 一, —
的无 线导 向设 备 已无 法 胜 任 ,为 了满 足在 长 距 离 、 大 深度 导 向钻进 施 工 中需求 , 我公 司采 用惯 性 导 航 技 术 自主研 制 、开 发 出 了新 型 的 C Y 1 线 地 磁 D 一 有
和三 维 测量 坐 标 系 , 维 大地 坐 标 系 由地 球 的重力 三 场 G和地 磁 场 M 建 立 。三维 测 量 坐 标 系 由安装 在 导 向传感 器 探 头 内的两 类 三组 敏感 元 件 ( 组 重力 每 计 、 力 计 各一 只 ) 磁 正交 安 装建 立 , 即在 三 维 导 向传
3 2
非开挖技术
T e cls eh oo y rn hes c n lg T
21 0 0年 4月
() 3 、工 具 面角 — —绕 仪器 轴按 顺 时针方 向 转动 的角 , 叫 自转 角 。 也 () 4 、大地 坐 标 系 X Y Z ,o指 向水 平 东 , o o ooX Y 指 向水平 北 ,o 直地 面 向上 示于 图 1 z垂 ,
2 测 量 原 理
导 向 传 感 器 的测 量 原 理 基 于三 维 大 地 坐 标 系
准 参 考三 维 坐标 系 , 以正 交 安装 在 导 向传感 器 内的 重 力计 和磁 力计 为测 量 三维 坐 标 系 。导 向传感 器 在 导 向钻 孔 中静 止或 匀 速 运 动时 , 用 这 两个 坐 标 系 利 和 导 向传 感 器 坐 标 轴 上 分 别 正 交 安 装 的 三个 重 力 计 和三 个 磁 力计 的测 量值 , 可 以精 确 地计 算 出 导 就 向传 感器 的工具 面 角 、 进方 位 角 和俯仰 角 。 钻
在 C Y 1 线地 磁 导 向仪 中 ,导 向传 感 器 是 D 一 有
随钻测量部件 , 安装在导 向钻头附近 。导向传感器 的核 心 部 件 是 石 英 挠 性 重 力 加 速 度 计 — — 以 下 简 称 重力 计 和 磁通 门式 磁力 计 — — 以下 简称 磁 力 计 。 采用 惯 性 导航 技 术 的 导 向传 感 器测 量 精 度 高 、 向 导
导 向仪 。 惯性导航技术已在航天 、 航空、 人造地球卫 星 、 弹制 导 、 油 钻 井 等 很 多领 域 得 到 了 广 泛 的 导 石
应用 。
图 1 大 地 坐 标 系
Y0 系
计 算 两 个 坐标 系 的 夹角 , 以精 确 地求 出导 向 可 传 感 器 的工 具 面 角 、 俯仰 角 和钻 进方 位 角 。导 向传