倾角测量论文
华南人髋臼前倾角测量分析及临床意义
华 南人 髋 关节 解 剖数 据库 的 建立 提供 数 据支 持 , 为设计 适 合 华 南人 的髋 关 节假 体 提供 理 论依 据 , 也 为 华南 地
Sh e n z h n e 51 8 0 3 6 ,Chi n a
[ A b s t r a c t ] O b j e c t i v e T o m e a s u r e a n d a n a l y s e t h e a c e t a b u l a r a n t e v e r s i o n o f t h e s o u t h C h i n a p e o p l e ,a n d p r o v i d e d a t a
DOI d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 3 — 7 0 8 3 . 2 0 1 3 . 0 6 . 0 1 5
Me a s u r e me n t a n d a na l y s i s o f t h e a c e t a b u l a r a n t e v e r s i o n o f s o u t h e r n Ch i n e s e a n d i t s e l i n i c a l
f e ma l e 5 2 )we r e r a n d o ml y s e l e c t e d a n d d i v i d e d i n t o g r o u p s b y h e i g h t a n d s e x .Ev e r y p e o p l e u n d e r we n t a p e l v i s C T s c a n n i n g .W e
浅谈倾角仪在桥梁挠度测量中的应用

浅谈倾角仪在桥梁挠度测量中的应用摘要:本文首先论述了倾角仪测量的原理,进而论述了倾角仪测量桥梁挠度的特点,最后从4个工程应用实例论述了当前倾角仪测量桥梁挠度的应用现状,以供参考。
关键词:倾角仪;桥梁测量;挠度测量Abstract: This paper first discusses the inclination of the principle of the measurement instrument, and then discusses the instrument measuring deflection Angle the characteristics of the bridge, and finally from the four examples of engineering application discusses the dip Angle meter measuring deflection current status of application of the bridge for reference.Key Words: dip Angle meter; bridge measurement; deflection measurement1 前言桥梁挠度测量是桥梁检测的重要组成部分,也是桥梁安全性评价的一项重要指标,其直接反映桥梁结构形变是否超出危险范围。
因此,桥梁动、静挠度测量方法的研究和仪器设备的开发研制对于桥梁承载能力的检测和桥梁的防震减灾有着重要的意义。
当前,常用的挠度测量仪器有经纬仪、水准仪、百分表等,但这些测量方法仍有一定的局限性,存在着费时费力、实时测量困难的现象。
而倾角仪是在回转摆上利用电容传感技术和无源伺服技术构成的高灵敏度抗振动干扰的倾角测量仪器,其是测量桥梁各测点的倾角值,然后通过专用软件给出桥梁各跨的静态和动态挠度曲线,具有较高的精度。
在此,本文简要阐述倾角仪在桥梁挠度测量中的应用,以供参考。
田间机器人前后倾角视觉测量的研究
田间机器人前后倾角视觉测量的研究【摘要】该论文论述了两种单目视觉的前后倾角测量的方案:方案一通过对田间图片的处理,提取田间过道指定位置在图片中的特征点像素(u,v),然后把这特征点的像素映射到建立好的BP神经网络,得出田间机器人的实际前后倾斜的角度。
并通过计算出来的倾斜角度与实际倾斜的角度相减得到绝对误差,实验表明该方案的最大绝对误差是1.05°,平均绝对误差是0.560°。
方案二通过对田间图片的处理,经过人工读取基准图片和倾斜图片的特征点的纵轴像素v,然后把得到的特征点像素v和基准图片对应的实际倾斜的角度映射到建立好的BP 神经网络,得出田间机器人的实际前后倾斜的角度。
并通过计算出的倾斜角度与实际倾斜的角度相减得到绝对误差,实验表明该方案的最大绝对误差是1.48°,平均绝对误差是0.875°。
两种方案的绝对误差相差不大,都在2°以内,方案一实验相对简单,特征点的位置是固定的,处理起来不容易;方案二实验相对复杂,计算出的实际倾斜角度可能会误差叠加,但实时性好。
【关键词】BP神经网络;图像处理;前后倾角引言本论文的主要目的是提出一种适合田间机器人前后倾角计算的简便方法,以便更快更准确的计算出田间机器人前后倾斜的角度。
农业机器人的种类很多,例如:耕作机器人,田间管理机器人,收获机器人,嫁接机器人,采摘机器人育苗机器人,葡萄树修剪机器人,施肥机器人,除草机器人,分拣果实机器人[1,2],大多数农业机器人导航大多数是用单目视觉来导航和定位的,因为单目视觉的导航处理的数据相对双目视觉导航的要简单,而GPS定位导航它具有精度高,但是其抗干扰能力较差,信号有可能偶然丢失[3]。
为了实现农业机器人导航和特定的做业功能,不仅需要判断当前机器人的位置和姿势,也需要判断当前机器人的倾斜角度,包括前后倾斜角度和左右倾斜角度,判断出倾斜角度则可以更加准确的实现农业机器人做业,对未来农业机器人更精确的做业具有一定的意义。
洛惠渠灌区U型渠道外倾角施工效果评价论文
浅谈洛惠渠灌区U型渠道外倾角施工与效果评价进行渠道改造是灌区提高水利用系数、保护输水工程安全运行的重要措施,洛惠渠灌区在改造渠道中采用合理的外倾角进行u型渠道混凝土衬砌,改造后渠道抗冻胀性效果好,砼质量易于控制,渠道占地小,不易淤积,节水效果十分显著。
u型渠道外倾角应用思考陕西省洛惠渠灌区位于关中平原东部,灌溉渭南大荔、蒲城、澄城三县31个乡镇及3个农场共74.3万亩。
干渠5条,长103公里,支渠14条,长131公里,斗渠249条,长932公里,分引渠4560条,长1407公里,灌区灌溉渠道经过不断改善、调整与扩建,逐步形成比较健全的干、支、斗、分、引五级渠,也成为关中东部小麦、玉米、棉花、油菜、瓜果、蔬菜生产基地。
但是由于灌区位于黄土塬区,气候条件恶劣,加之受原技术水平和施工经济条件限制,工程设计标准不高,衬砌率低,渠道经过几十年运行,原衬砌渠道大部分遭到破坏,致使渠道渗漏严重。
近年来,随着灌区工程相继实施,有效地提高了水利用系数,保护输水工程安全。
尤其是在灌区渠道改造中,采用合理外倾角的设计,进行u型衬砌,取得了非常显著的成效,渠道面貌焕然一新,节水效果十分显著。
1灌区历年渠道设计与运行情况1999年以前,灌区就对渠道进行u型衬砌改造,当时考虑到外倾角越小,施工越方便,对提高表面质量及内在质量效果越明显,故所有改造的u型渠道外倾角均采用8.5°。
但由于灌区所处的特殊地理位置,冬季气温低,冻胀破坏力强,实践证明外倾角8.5°的u型渠道在运行2-3年后,衬砌板直线段在冻胀力及外力作用下,基本从衬砌底部向上1/3高度处内倾倒塌,淤积于渠道中,严重影响灌溉效益的发挥。
2衬砌渠道破坏的根由灌区冬寒、夏热。
根据资料统计,年平均气温12.2℃,绝对最高温度36.9℃,绝对最低温度-25.1℃,属寒温带半干燥气候区,最大冻土深度为0.4m左右,因灌区主要为小麦冬灌及玉米夏灌,按照灌区灌溉习惯,冬季灌溉为每年11月下旬开始至冬至前后,历时40天左右,春季灌溉为每年2、3月开始,历时50天左右,夏季灌溉为每年6月至8月,灌溉历时40天左右。
基于倾角传感器的倾角测量系统设计

基于倾角传感器的倾角测量系统设计引言目前,业内对倾角的测量多是基于MEMS 的加速度传感器,SCA100T 是由芬兰VTI 公司推出,采用三维MEMS 技术开发的一款高精度双轴倾角传感器,可同时测量相对于水平面的倾斜和俯仰角度,具有温度补偿功能。
本文以塔式起重机为应用背景,采用SCA100T 倾角传感器实时采集倾斜信息,检测塔式起重机支撑架的平衡性能,避免由于其过度倾斜而引发事故。
以SCA100T 为基础设计了一款小巧、灵敏度高的倾角测量系统,分析了SCA100T 倾角传感器测角的原理,给出了系统各个模块的软硬件设计方法,同时提供了两种具有可扩展性的应用方法。
1 整体设计图1 所示为本系统的整体结构框图。
该系统采用ATmega8 单片机控制SCA100T 倾角传感器实时检测平台的倾角变化,将传感器输出的数字量进行换算后,转换为实际的倾角值。
用户可以根据需要设置警界倾角值和预定平台水平位置,倾角信息可通过LCD 实时显示或通过串口输出到上层控制器中。
当倾角信息超过预置的警界倾角值时,系统开始报警,表现为蜂鸣器报警和LED 灯闪烁。
系统根据输出方式的不同分为两种应用方式:一种是作为独立系统使用,固定在待测平台上;另一种是将该系统作为一个倾角采集模块,挂接在其他电路中使用。
前者采用LCD1602 实时显示倾角信息,采用串口超级终端预设倾角警界值和水平位置;后者通过串口输出倾角信息,允许软件编程通过发送串口命令进行配置。
配置信息均保存在ATmega8 单片机内部的EEPROM 中。
2 倾角测量原理本文选用的SCA100T 的测量范围为±30°,其内部包含硅电容感应元件、EEPROM 存储器、信号调理电路、A/D 转换器、温度传感器和SPI 传输接口等,SCA100T 功能框图如图2 所示。
该传感器具有X、Y 两个通道,分别用来测量倾斜和俯仰的加速度,每个通道具有自测试系统,可内部产生一。
倾角测量方法研究
中图 分 类 号 : H 4 T 71
文献标识码 : A
倾 角测 量 方 法 研 究
易亚 星, 李 忠科 , 邓 方 林
( 二 炮 兵 工 程 学 院 计 钟 中 心 ,陕 西 西 安 第 : 702) 10 5
摘 要 :文 章 分 析 了倾 角测 量 的 一 般方 法 ,提 出 了一 种 新 的 二 维 倾 角 测 量 方 法 ,该 方 法 采 用 液 体 摆 敏 感 原 理 , 由激 光 束 与 二 维 P D 组 成 灵 敏 的 二 维 光 电读 数 系统 ,具 有 良好 的 温 度 稳 定性 和 时 间 稳 定 性 。 S 关 键 词 :激 光 技 术 ;测 量 仪 器 ;P D S
太阳能电池板最佳倾角与纬度数学关系_数学论文
太阳能电池板最佳倾角与纬度数学关系_数学论文目前,太阳能电池板安装时最佳倾角的计算有多种方法,都是根据理论推导下得到的,不适用与实际的工程领域当中。
为了简化最佳倾角的计算模型,首先通过计算机得到最佳倾角与纬度离散点走势的关系。
然后通过走势关系指定要拟合的函数关系式。
最后通过计算机得到指定函数的各项参数。
得到的最佳倾角的计算公式便于在工程领域中应用。
对于太阳能电池板的安装方式有多种方法,最常见的方法有两种,一种是固定式安装,另一种则是旋转式安装。
不同的安装方法对于最佳倾角的理解是不同的。
他们的共同目的就是电池板与太阳的入射方向成一定的角度,达到太阳直射电池板的目的,增大光伏供电系统的发电量。
而将此角度称之为太阳能电池板的最佳倾角。
目前,在国内外通常计算最佳倾角时,首先要计算太阳辐射量,然后根据当地的纬度计算太阳赤纬角、水平日落角度等。
最后结合计算的各项参数,得出当地的最佳倾角。
在计算太阳辐射量时常采用Klein (KleinSA.Calculatonofmonthlyaverageinsolationontiltedsurfaces[J].SolarEnergy,1977,19(4):325-329)提出的方法。
无论是在计算太阳辐射量和当地的各类参数时,都没有考虑海拔对最佳倾角的影响。
文献(杨金焕,毛家俊,陈中华.不同方位倾斜面上太阳辐射量及最佳倾角的计算[J].上海交通大学学报,2002,36(7):1.32-1.36)根据普遍方法计算出的最佳倾角,拉萨市的倾角与其他主要城市的倾角相差较大,并且出现反常现象。
这说明分析纬度与最佳倾角的函数关系是很有必要的一项工作。
在分析两组数据之间的函数关系式时,最常用的方法有数据拟合、插值和回归分析等方法。
回归分析的前提是两组数据的基本上呈线性关系时,才可以使用此方法。
显然当地纬度与最佳倾角之间不可能是线性的关系。
因此使用插值和数据拟合方法找出当地纬度与最佳倾角之间的关系。
倾角仪特性研究及其测量误差补偿
e p rme t e n tae h e sb l y a d v l i fte p o o e t o . x e i n mo srt st e fa ii t n a i t o rp s d meh d d i dy h
Ke o d y w r s: i lnao ;n ln a ro ; tmp r t e d f ro ;p l o a tig nci tr oni e r er r e e aur r te r oyn milf tn i i
与非线性输出的多项式模 型 , 拟合求出了多项式模 型的各个 系数 与环境温度 的关系 函数 , 到了倾 角仪在 得
一
定倾角范围和温度 范围内的测量误差的计算公式 。实验证明了方法的可行 性和有效性 。 中图分类号 :T 1 P22 文献标识码 :A 文章 编号 :10 - 77 2 1 ) 30 8 -3 0 09 8 (0 1 0 -0 40
摘
要 :为 了减 轻 非 线 性 因 素 和 环境 温度 的变 化 对 倾 角 仪 测 量 的影 响 , 充 分研 究 倾 角 仪 测 量 特 性 的 基 在
础 上 , 用 多项 式 拟 合 方 法 研 究 了倾 角 仪 非 线 性 误 差 和 温 度 漂 移 误 差 的软 件 补 偿 技 术 。建 立 了 测 量 误 差 采
关 键 词 :倾 角 仪 ;非 线性 误差 ; 度 漂 移 误 差 ; 项 式 拟 合 温 多
Re e r h o h r c e itc o h n ln t r a d c m p n a i n s a c n c a a t rsi ft e i ci a o n o e s to
f r l f he nci tr’S o mua o t i lnao me s r m e e o i a a g o i lnain n tmpea u e s c uie a u e nt r r n r n e f nci to a d e r t r i a q r d.Th e
基于三轴加速度传感器的倾角测量系统的设计
Product Feature
void ADXL345_Init(void) { SPI_Wrt(0x31,0x28); SPI_Wrt(0x00,0x00); SPI_Wrt(0x00,0xFD); SPI_Wrt(0x00,0x03); SPI_Wrt(0x21,0x00); SPI_Wrt(0x22,0x00); (1.25ms/LSB) SPI_Wrt(0x23,0x00); SPI_Wrt(0x24,0x01); SPI_Wrt(0x25,0x01); SPI_Wrt(0x26,0x2B); SPI_Wrt(0x27,0x00); SPI_Wrt(0x28,0x09); SPI_Wrt(0x29,0xFF); SPI_Wrt(0x2A,0x80); SPI_Wrt(0x2C,0x0B); SPI_Wrt(0x2D,0x28); 眠 ,唤醒功能 SPI_Wrt(0x2E,0x02); SPI_Wrt(0x2F,0x00); SPI_Wrt(0x38,0x9F); } //所有均关闭 开水印中断 //中断功能设定 ,不使用中断 INT1 // 流模式 触发连接 INT1 31 样本 //输出数据速率设为 200Hz //开启 Link,测量功能 ;关闭自动休眠 ,休 //敲击窗口 0:禁用 ; (1.25ms/LSB) //保存检测活动阈值 ; (62.5mg/LSB) //保存检测静止阈值 ; (62.5mg/LSB) //检测活动时间阀值 ; (1s/LSB) } //X 轴误差补偿 ; (15.6mg/LSB) //Y 轴误差补偿 ; (15.6mg/LSB) //Z 轴误差补偿 ; (15.6mg/LSB) //敲击延时 0:禁用 ; (1.25ms/LSB) // 检 测 第 一 次 敲 击 后 的 延 时 0: 禁 用 ; char SFRPAGE_SAVE; SFRPAGE_SAVE = SFRPAGE; SFRPAGE = CONFIG_PAGE; EA=0; for (i=0;i<31;i++) { datax[i]=(SPI_Read(0X32)+(SPI_Read(0x33)<<8))&0X1FFF; datay[i]=(SPI_Read(0X34)+(SPI_Read(0x35)<<8))&0X1FFF; dataz[i]=(SPI_Read(0X36)+(SPI_Read(0x37)<<8))&0X1FFF; } EA=1; SFRPAGE = SFRPAGE_SAVE;
关于自平衡系统中倾角测量问题的探讨
关于自平衡系统中倾角测量问题的探讨文章主要根据陀螺仪自身的结构特点,将其在自平衡系统中的应用做了详细介绍,并且加速度计的使用也做了说明。
标签:自平衡;陀螺仪;加速度计我们大家都知道,自平衡系统的研究一直是我们自动化领域的一个热门课题。
自平衡系统的主要特征就是以系统在垂直方向和水平方向上的位移为研究对象,使其控制在一定的可调范围内。
那么解决垂直方向和水平方向上位移问题的关键器件就是陀螺仪和加速度计,文章将对二者做一个介绍。
1 什么是陀螺仪传统的认知来源于陀螺,被大家所熟知,陀螺是一个几何对称的模具,有自己的自转轴,并且质量分布均匀,是绕一个支点高速转动的刚体。
它的设计思想来源苍蝇后翅(特化为平衡棒),由其仿生而来。
我们小时候玩耍的陀螺大家都非常熟悉,它在高速旋转的情况下仍然能够竖直不倒而保持与地面垂直,围绕着固定的转轴不停的自转的,但是这种旋转不是自身带来的,是在一定的初始条件下我们所施加的外力作用下产生的,我们把这种陀螺的旋转称为回转效应。
人们把根据陀螺的力学性质所研制成功的不同功能的装置称为陀螺仪。
陀螺仪的应用范围很广,目前被应用在军事、科技、国防等领域的较多,那我们熟知的回转罗盘、炮弹旋转、地球在太阳(月球)引力矩作用下的旋进(岁差)等。
文章主要介绍应用在自平衡系统中的陀螺仪。
近年来,自平衡运动控制系统的研究在国内外得到重视并迅速发展,美国、日本、瑞士等国家建立了多个实验原型机,提出众多解决平衡的控制方案,丹麦乐高公司Steve Hassenplug设计出自平衡机器人;美国SegwayLLC公司开发的Segway两轮平台电动车;都是基于系统自平衡运动控制系统的研究与应用。
在国内哈尔滨工业大学也开始研究自平衡机器人,采用Cygnal公司的单片机与上位机进行控制;中国科技大学也在开发两轮自平衡代步电动车;台湾国立中央大学基于FPGA及个人电脑开发的两轮平衡机器人。
以上这些平衡系统的研究都离不开重要的陀螺仪对它的影响。
一种倾角测量方法
一种倾角测量方法引言倾角测量在许多领域中都是至关重要的。
例如,在建筑工程中,倾角测量可以用来确定建筑物的垂直度,从而确保建筑结构的稳定性;在地质勘探中,倾角测量可用于分析地层的特征和形成过程;在机械制造中,倾角测量可以用来确保零件的正确装配和运行。
然而,传统的倾角测量方法往往需要昂贵的设备和繁琐的过程。
因此,我们需要一种简单、准确和经济的倾角测量方法。
方法我们提出了一种基于加速度传感器的倾角测量方法。
加速度传感器是一种常见的电子设备,广泛应用于智能手机、游戏手柄等设备中。
它可测量物体在三个空间维度上的加速度,我们可以利用加速度信息推断出物体的倾角。
首先,我们需要在目标物体上安装三个加速度传感器,分别在x、y和z轴方向上。
这些传感器可以被固定在物体表面或嵌入其中,以确保准确的测量。
接下来,我们需要获取传感器采集到的三维加速度数据。
这些数据可以通过传感器的接口连接到计算机或移动设备上进行获取和处理。
在获取加速度数据后,我们可以利用以下公式计算目标物体的倾角:倾角X = atan2(ax, sqrt(ay^2 + az^2))倾角Y = atan2(ay, sqrt(ax^2 + az^2))倾角Z = atan2(az, sqrt(ax^2 + ay^2))其中,ax、ay和az分别是在x、y和z轴方向上测得的加速度值。
优势相比传统的倾角测量方法,我们提出的基于加速度传感器的方法具有以下几个优势:1. 简单易用:该方法只需要安装传感器并获取加速度数据,无需复杂的设备或繁琐的过程。
2. 准确度高:加速度传感器具有较高的精度和灵敏度,可以提供较为准确的倾角测量结果。
3. 实时性强:由于传感器能够实时采集数据,因此可以实时监测物体的倾角变化,及时做出调整。
4. 经济实惠:与传统的倾角测量设备相比,加速度传感器价格相对较低,成本更为经济。
应用场景基于加速度传感器的倾角测量方法具有广泛的应用场景。
以下是一些典型的应用示例:1. 建筑工程:可以用于测量建筑物的倾斜度,确保建筑物的垂直度和结构稳定性。
高精度数字重力仪的倾角测量技术研究
由于倾 斜 导 致 的 重 力 读 数 误 差 的 计 算 公
$倾角测量系统 倾角测量系统主要由倾角传感器*激励源电路*
基准电压*传感器输出*相敏检波电路*放大及低通 滤波 电 路*I1< 转 换 器*计 算 机 系 统 等 部 分 组 成/'0(0&倾角测量系统框图如图!所示&
图$倾角测量系统框图
$!%
)2 # " " 673* "3M^*) *2 " " 673) 3M^) " # " *
,2 " 13M^) 673)03M^* "673*, $'%
计算可得
)2 673)
" 3M^) )
*2 " 03M^* 33M^) 673* 3M^* 3673) *
பைடு நூலகம்
精确地测定!再经过计算得出补偿量进行数学补偿!
以消除仪器微小倾斜对重力测量精度的影响&
图)石英重力传感器原理示意图
绕) 轴的旋转&在三维场景中!设向量/)!*! ,0先绕) 轴倾斜)!当一个点 -$)!*!,%绕) 轴旋 转)!得到点 -.$).!*.!,.%&由于是绕) 轴进行的 旋转!因 此 ) 坐 标 保 持 不 变!* 和, 组 成 的*/, $/ 是坐标原点%平面上进行的是一个二维的旋转! 于是 有,)c`)!*c`*673),3M^)!,c`*3M^) X ,673)&0)$)%为旋转矩阵
!&#倾角传感器的选型 测量倾角的 传 感 器 种 类 繁 多/%0!按 照 其 工 作 原
理主要有 YKY/*固体摆式和液体摆式等&基于表 面微电子机械的加速度计原理的倾角传感器!具有 极低的功耗和噪声!体积小*重量轻!但精度较低!而 且对温度变化敏感-对于固体摆式倾角传感器的研 究已经比较成熟且应用广泛!但其易受外界干扰!如 机械振动冲击等-而液体摆式倾角传感器具有高灵 敏度*高稳定性*耐腐蚀*耐潮湿等特点!电解质型倾 角传感器属于液体摆式&本仪器最终选用液体摆式 倾角传感器!也称为电解质型倾角传感器& !&!电解质型倾角传感器工作原理
太阳能热水器的倾角计算(Mathematica作业论文)
题目: 太阳能热水器的倾角计算XX大学地球科学与工程学院2012年10月1真空管式太阳能热水器工作原理1.1全玻璃真空管的结构如图所示,全玻璃真空集热管可分为内玻璃管、外玻璃管、支撑件和选择性涂层等几部分,实质上是一种夹层抽成真空并在内管外壁镀上选择性吸收涂层的双同心玻璃管,形如拉长的暖瓶。
制造真空集热管一般选用高硼硅玻璃,该型号玻璃具有良好的光线透过率,平均光线透过率超过90%以上,同时具有低的热膨胀系数,耐热急变性能良好,抗酸碱性能较高。
可以在一20℃以下的环境下使用.在正常情况下,内管温度可达100℃,空晒时可高达260℃。
为减少内外管之间的传热,它采用高真空技术,使内外层玻璃管之闯夹层的压强维持在10—3Pa以下,基本上消除了内外管壁之间空气的热传导和基本上消除了外层盖板玻璃和内层吸热玻璃之间的热传导和自然对流。
为保持夹层内的真空度,在夹层的底部还放置了吸气剂。
为保证在真空管对太阳辐射充分吸收的同时有效的降低内外管之间的辐射热损,在玻璃内管外表面上采用高真空反应蒸镀、磁控溅射等技术镀上具有优良耐热性和长期稳定性的选择性吸收涂层,使真空管对透过外管壁的太阳光谱范围(0.35~2.5um)辐射能量具有较高的吸收率,而在远红外波段(2.5~2.5um)具有很低的发射率,因而有效地拟制了辐射热损。
它的工作原理是通过涂层吸收太阳辐射能量,以金属基底发射长波辐射。
1。
2真空管式太阳能热水器结构全玻璃真空管太阳能热水器集热器由开口端插入水箱下部的一定数目的真空管组成,真空管内选择性吸收涂层吸收太阳辐射热量,内管管壁温度升高并加热真空管内的水,由于水箱内的水湿低于真空管内水温,则利用水箱、真空管内冷热水之间的自然对流将热量逐步传递到水箱中去。
1.2。
1水箱系统水箱系统一般由内胆、外壳、内外壳之间的保温材料及相关真空管密封圈组成。
内胆由于长期和水接触,所以要求材料耐腐蚀性能良好,便于加工,且具有良好的卫生性能。
倾角测量方法范文
倾角测量方法范文倾角测量是指通过测量一些物体或地面相对水平面的倾斜角度来进行测量的一种方法。
1.气泡水平仪气泡水平仪是一种常见的倾角测量工具,其工作原理是利用气泡和液面来判断物体是否水平。
气泡水平仪通常由一个圆形的玻璃管和一个密封的曲面容器组成,容器内填充有适量的液体。
当容器放置在平稳的地面上时,液体会自动平衡,气泡处于中央位置,表示物体水平。
如果物体倾斜,气泡会移动到一侧,通过读取气泡所在位置,可以确定物体的倾角。
2.激光水平仪激光水平仪利用射出的激光光线来测量物体的倾角。
激光水平仪通常由一个可以旋转的激光发射器和一个相应的接收器组成。
激光发射器发射出一道水平的激光线,接收器接收到激光线后会发出信号。
通过测量接收器接收到的信号强度,可以确定物体倾角的大小。
激光水平仪测量精度高,适用于大范围的倾角测量。
3.电子倾角仪电子倾角仪是一种采用电子传感器来测量物体倾角的仪器。
电子倾角仪通常由一个或多个加速度计和陀螺仪组成,通过测量物体的加速度和角速度来计算物体的倾角。
电子倾角仪可以实现高精度的倾角测量,并且可以根据需要进行自动记录和数据传输。
4.全站仪全站仪是一种综合测量仪器,可以测量水平角和垂直角,从而确定物体的倾角。
全站仪通常由一个望远镜和一个精密的角度测量系统组成。
通过观察物体或地面上的特定点,可以测量望远镜指向的方位角和俯仰角,进而计算出物体的倾角。
无论采用哪种倾角测量方法,在实际测量过程中都需要注意以下几点:1.选择合适的测量工具和仪器,不同的测量对象和测量精度要求可能需要不同的倾角测量方法。
2.保证测量工具和仪器的稳定性和准确性,避免因为仪器的不稳定造成测量误差。
3.确定测量基准和参考坐标系,以便后续数据处理和分析。
4.根据具体测量要求,选择合适的数据记录和处理方法,比如实时记录、数据导出、数据分析等。
综上所述,倾角测量是一种常见的测量方法,根据具体应用需求选择不同的测量工具和仪器,可以实现高精度的倾角测量。
华南人髋臼前倾角测量分析及临床意义

华南人髋臼前倾角测量分析及临床意义金进宝;石岩;尚鹏;崔文岗;熊建义;王大平;肖德明【摘要】目的测量分析华南人髋臼前倾角,为设计适合华南人的髋关节假体提供数据支持.方法随机选取115例患者及志愿者(男63人,女52人)作为研究对象,按身高和性别不同分组.对各组研究对象骨盆进行螺旋CT扫描,将扫描数据以Dicom格式导入Mimics软件重建髋臼三维模型;采用Imageware软件测量髋臼模型前倾角并进行统计分析.结果测得华南人髋臼前倾角平均值为16.37°,与我国其他地区人群及欧美人存在差异,均有显著统计学意义(P<0.05);男性髋臼前倾角较女性小,差异有统计学意义(P<0.05),髋臼前倾角大小与身高无明显相关性(P>0.05).结论本研究精确测得华南人髋臼前倾角,为华南人髋关节解剖数据库的建立提供数据支持,为设计适合华南人的髋关节假体提供理论依据,也为华南地区全髋关节置换术提供数据参考.【期刊名称】《国际骨科学杂志》【年(卷),期】2013(034)006【总页数】4页(P439-441,448)【关键词】华南人;髋臼;前倾角;髋关节假体【作者】金进宝;石岩;尚鹏;崔文岗;熊建义;王大平;肖德明【作者单位】510182, 广州医科大学;518035,深圳市第二人民医院骨科;510182, 广州医科大学;518035,深圳市第二人民医院骨科;518055,中国科学院深圳先进技术研究院;510182, 广州医科大学;518035,深圳市第二人民医院骨科;518035,深圳市第二人民医院骨科;518035,深圳市第二人民医院骨科;518036, 北京大学深圳医院骨科【正文语种】中文人工髋关节置换术在假体设计、假体材料、固定方法及手术技术等方面有了很大发展。
目前人工髋关节置换广泛用于治疗股骨头坏死、晚期髋关节骨关节炎、类风湿关节炎等严重髋关节疾病,虽然解除了患者的痛苦,但同时也带来不少并发症,如假体脱位、关节不稳定、双下肢不等长等。
倾角法测桥梁挠度研究
倾角法测桥梁挠度研究摘要:本文通过对倾角法的原理介绍及检测方法,阐述了倾角法在桥梁挠度的优势及适用范围。
关键词:桥梁挠度倾角法简支梁1.概述使用倾角法测量桥梁的挠度,并不同于传统的方法如百分表法、水准仪法直接测得桥梁某一点的挠度值,而是首先使用倾角仪测得桥梁变形时几个截面的的倾角,根据倾角拟合出倾角曲线,进而得到挠度曲线,这样就可以求得桥梁上任意一点的挠度值。
倾角法实际上是一种间接地得到桥梁挠度的方法,因此准确地获取桥梁变形时截面的倾角值,是整个测量工作至关重要的一步。
2.原理在待测桥梁上选定的k个测点上布设倾角仪,必须在支点上布设倾角仪,并假定桥梁变形在弹性范围内。
根据加载前后每一测点倾角仪输出的电压差,就可以得到被测桥梁上的k个倾角值αi(i=1,2,…k),即可得各点的斜率θi(i=1,2,…k)。
根据k个点的斜率,拟合出连续光滑的倾角曲线θ(x),然后求积分,并根据支座处位移为零的边界条件,得到桥梁变形的挠度曲线y(x),输入任意点的坐标值,即可得到该点的挠度。
以简支梁为例,如图1所示。
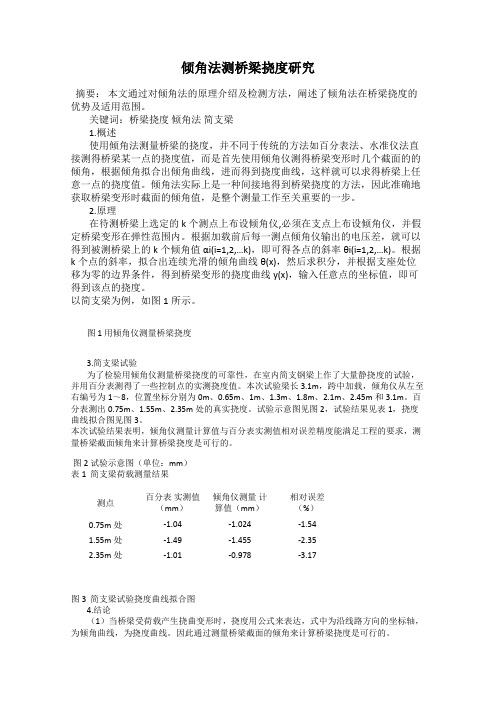
图1 用倾角仪测量桥梁挠度3.简支梁试验为了检验用倾角仪测量桥梁挠度的可靠性,在室内简支钢梁上作了大量静挠度的试验,并用百分表测得了一些控制点的实测挠度值。
本次试验梁长3.1m,跨中加载,倾角仪从左至右编号为1~8,位置坐标分别为0m、0.65m、1m、1.3m、1.8m、2.1m、2.45m和3.1m。
百分表测出0.75m、1.55m、2.35m处的真实挠度。
试验示意图见图2,试验结果见表1,挠度曲线拟合图见图3。
本次试验结果表明,倾角仪测量计算值与百分表实测值相对误差精度能满足工程的要求,测量桥梁截面倾角来计算桥梁挠度是可行的。
图2 试验示意图(单位:mm)表1 简支梁荷载测量结果测点百分表实测值(mm)倾角仪测量计算值(mm)相对误差(%)0.75m处 -1.04 -1.024 -1.541.55m处 -1.49 -1.455 -2.352.35m处 -1.01 -0.978 -3.17图3 简支梁试验挠度曲线拟合图4.结论(1)当桥梁受荷载产生挠曲变形时,挠度用公式来表达,式中为沿线路方向的坐标轴,为倾角曲线,为挠度曲线。
倾角仪特性研究及其测量误差补偿
倾角仪特性研究及其测量误差补偿文香稳;潘明华;朱国力【期刊名称】《传感器与微系统》【年(卷),期】2011(030)003【摘要】为了减轻非线性因素和环境温度的变化对倾角仪测量的影响,在充分研究倾角仪测量特性的基础上,采用多项式拟合方法研究了倾角仪非线性误差和温度漂移误差的软件补偿技术.建立了测量误差与非线性输出的多项式模型,拟合求出了多项式模型的各个系数与环境温度的关系函数,得到了倾角仪在一定倾角范围和温度范围内的测量误差的计算公式.实验证明了方法的可行性和有效性.%To reduce the impacts of nonlinearity and variation of environment temperature on the measurement of the inclinator,a software compensation technology for the inclinator' s nonlinear error and temperature drift error is studied using the method of polynomial fitting, on the basis of fully research on the measurement characteristic. The polynomial model between the measurement error and the nonlinear output is built. The relational function between each coefficient of the polynomial model and the environmental temperature is obtained by fitting. A calculation formula of the inclinator' s measurement error in a range of inclination and temperature is acquired. The experiment demonstrates the feasibility and validity of the proposed method.【总页数】3页(P84-86)【作者】文香稳;潘明华;朱国力【作者单位】华中科技大学,机械科学与工程学院,湖北,武汉,430074;华中科技大学,机械科学与工程学院,湖北,武汉,430074;华中科技大学,机械科学与工程学院,湖北,武汉,430074【正文语种】中文【中图分类】TP212【相关文献】1.相控阵测量雷达扫描特性及误差补偿方法研究 [J], 岳锐;李红维;张志学;初建海2.基于运动学的质量特性测量误差补偿方法研究 [J], 吴家存3.正交视觉与倾角仪组合空间位姿测量方法研究 [J], 肖兴维; 马国鹭; 曾国英; 陆野4.高精度数字重力仪的倾角测量技术研究 [J], 陶照明;梁连仲;秦佩;黄涛;王斌5.基于运动学的质量特性测量误差补偿方法的研究 [J], 王超;张晓琳;唐文彦;王军;马强因版权原因,仅展示原文概要,查看原文内容请购买。
膝关节置换术中胫骨平台后倾角测量的研究进展
膝关节置换术中胫骨平台后倾角测量的研究进展膝关节置换是目前治疗各种膝关节炎症晚期及类风湿关节炎等膝关节病变的主要方法,国内外广泛应用,而手术成功的关节之一就是胫骨平台后倾角的测量,它不仅为膝关节置换术及其以后的翻修提供准确的数值,在术中可以准确的截骨,更为改进和设计人工膝关节假体提供数据支持,目前国内的膝关节假体大多由国外生产,而西方人的膝关节构造与国人存在一定差异,所以研究国内外膝关节的后倾角成为一种必要。
标签:膝关节置换;后倾角;研究进展1 膝关节置换术来源国际上最早设计的人工关节是人工髋关节,1962年,英国医生Charnley设计了金属的人工股骨头,由此开创了人工髋关节置换术,也因此被称为人工关节之父,人工髋关节置换在应用不久之后,在临床上也开始使用人工膝关节,经过三十余年的发展,人工膝关节取得了很好的疗效,并且成为现在疗效最好的人工器官之一。
2 国外膝关节置换情况根据对于欧美17个国家的统计,每年行膝关节置换手术的人数大约有110万,其中二次翻修的占8%,并且行膝关节置换手术的人数每年都以11%的速度增加,其中,女性约占膝关节置换术总人数的64.4%,而小于65周岁行膝关节置换者约为29.4%,由此可见,年轻化是膝关节置换逐渐出现的趋势,所以如何提高膝关节假体质量,设计适合我国国民的膝关节假体显得尤为重要,而膝关节的后倾角数据测量为此提供了重要依据。
3 研究背景在全膝关节置换术中胫骨平台截骨后倾角具有重要意义,众多学者采用0°~10°左右,而胫骨假体的后倾角只有与人体互相匹配才能使其和周围软组织协调运动,防止胫骨假体松动,使假体的使用寿命延长。
目前,国内使用的膝关节假体主要靠进口,即便是国产的假体也是按照西方人的解剖形态和体型研制的克隆假体,尚缺乏统一性和特异性。
4 研究意义膝关节后倾角度对于全膝关节表面置换有重大意义,而膝关节置换也要求严格测出膝关节各种力线和角度,因此后倾角的测量必不可少,目前国内大多学者膝关节置换采用的角度一般约为0°~10°,而有的学者报道胫骨平台后倾角为(10°±4°)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录第一章简介...........................................................................(8-11)1.1 引言 (8)1.2 三轴倾角传感器ADXL345简介 (8)1.3三轴倾角的计算............................................................(8-9)第二章总体设计方案及原理框图.............................................(13-15)2.1 原理框图 (13)2.2 总体设计方案...............................................................(13-15)第三章硬件设计..................................................................(16-18)3.1 传感器硬件电路 (16)3.2 液晶显示器硬件电路......................................................(16-17)3.3 报警电路.....................................................................(17-18)3.4 总硬件原理图 (18)第四章软件设计..................................................................(19-24)4.1 软件的功能需求 (19)4.2 各部分程序框图............................................................(19-24)第九章参考文献 (28)附录器件清单全部程序和实物图片……………………………………(30-41)第一章简介1.1 引言随着市场需求和科技的发展,人们对工程、机械、航空、航海设备的可靠性和稳定性提出了更高的要求,其中姿态测量是一项重要的指标。
倾角传感器是测量关于某一基准面的倾斜角或者是姿态的装置。
目前,市场上已有单轴、双轴、三轴的倾角传感器,但大多都价格昂贵或者体积较大。
本文提出以三轴传感器ADXL345和STC89C51单片机实现的设计,可大大降低系统成本,不但可以构成一个单独的数字输出传感器,也可以作为一个测量模块,嵌入到测量控制系统中,广泛应用于机器人控制、平台姿态(俯仰和滚转)测量、双轴加速度测量等系统中。
1.2 三轴倾角传感器ADXL34简介ADXL345是一款小巧纤薄的低功耗三轴加速度计,可以对高达±16 g的加速度进行高分辨率(13位)测量。
数字输出数据为16位二进制补码格式,可通过SPI(3线或4线)或者I2C数字接口访问。
ADXL345非常适合移动设备应用。
它可以在倾斜检测应用中测量静态重力加速度,还可以测量运动或冲击导致的动态加速度。
它具有高分辨率(4 mg/LSB),能够测量约0.25°的倾角变化。
使用ADXL345等数字输出加速度计时,无需进行模数转换,从而可以节省系统成本和电路板面积。
此外,ADXL345内置多种功能。
活动/非活动检测、单击/双击检测以及自由落体检测均在内部完成,无需主机处理器执行任何计算。
内置32级FIFO 存储缓冲器可以减轻主机处理器的负担,起到简化算法和省电的作用。
利用内置的活动/非活动检测功能,将ADXL345用作“运动开关”(无活动时关闭整个系统,检测到活动时才开启),系统可以实现进一步省电。
ADXL345是一款小巧纤薄的低功耗三轴加速度计,可以对高达±16 g的加速度进行高分辨率(13位)测量。
数字输出数据为16位二进制补码格式,可通过SPI(3线或4线)或者I2C数字接口访问。
ADXL345非常适合移动设备应用。
它可以在倾斜检测应用中测量静态重力加速度,还可以测量运动或冲击导致的动态加速度。
它具有高分辨率(4 mg/LSB),能够测量约0.25°的倾角变化。
使用ADXL345等数字输出加速度计时,无需进行模数转换,从而可以节省系统成本和电路板面积。
此外, 2ADXL345通过IC或SPI接口进行通信。
1.3 三轴倾斜的计算引入第三轴时可在全球范围内确定传感器的方向。
可通过传统的直角坐标系(x,y,z)球面(ρ,θ,φ)转换法来表征xy平面倾斜角θ及重力矢量倾斜角,ADXL345输出的X、Y、Z三个轴向德原始数据,要得出角度值必须要经过实际换算,其公式如下所示:1.4 STC89C51单片机简介1.4.1 STC89C51系列单片机的主要性能特点STC89C51系列单片机是宏晶科技推出的新一代超强抗干扰、高速、低功耗的单片机,指令代码与传统8051单片机完全兼容。
MCS-51的主要特点为:◆CPU为8位;◆片内带振荡器,频率范围为1.2~12MHz;◆片内带128字节的数据存储器;(RAM)◆片内带4KB的Flash程序存储器;(ROM)◆程序存储器的寻址空间为64KB;(需要扩展ROM)◆片外数据存储器的寻址空间为64KB;(需要扩展RAM)◆128位(16字节)用户位寻址空间;(在128个字节中)◆18个字节特殊功能寄存器SFR(MCS—52子系列为21个);◆4个8位的并行I/O接口:P0、P1、P2、P3;◆2个16位定时器/计数器T0、T1;(MCS-52子系列为3个,T2)◆2个优先级别的5个中断源;(高、低2个)◆1个全双工的串行I/O接口,可多机通信;◆片内采用单总线结构;◆有较强的位处理能力;1.4.2 MCS-51系列单片机的基本组成图1-5 管脚图AT89C51与51系列中各种型号芯片的引脚互相兼容。
目前多采用40只引脚双列直插,如图2-2所示。
引脚按其功能可分为如下3类:①电源及时钟引脚——VCC、VSS;XTAL1、XTAL2;② 控制引脚——/RST VPD 、/ALE PROG 、PSEN 、和/EA VPP ;③ I/O 口引脚——P0、P1、P2、P3,为4个8位I/O 口。
第二章 设计总体方案及原理框图2.1 原理框图本课题设计原理框图如下图(图2-1):图2-1原理框图该车体倾斜姿态测量仪原理框图主要由传感器、单片机、液晶显示器、报警电路,串口通信电路等组成;通过传感器感应被测物体角度的变化,单片机通过读取传感器的数字量,然后由单片机输出信号控制显示、报警等。
2.2 设计方案2.2.1传感器选用本方案中选用的传感器是ADXL345,引脚图见图2-2。
ADXL345是一款小而薄的超低功耗3轴加速度计,分辨率高(13位)测量范围达± 16g 。
数字输出数据为16位二进制补码格式,可通过SPI(3线或4线)或I2C 数字接口访问。
ADXL345非常适合移动设备应用。
它可以在倾斜检测应用中测量静态重力加速度,还可以测量运动或冲击导致的动态加速度。
其高分辨率(3.9mg/LSB),能够测量不到1.0°的倾斜角度变化。
而且ADXL345是三,可以测量X,Y,Z三方向的加速度。
图2-2 SCA100t-D02引脚图2.2.2液晶显示器选用本方案中选用的液晶显示器的型号是1602,引脚图见图3-3,LCD1602显示器有20个引脚,能够双行显示20为字符,本方案的思想是显示器的两行分别显示传感器的X和Y轴对应角度;当角度超过20°时,在对应角度后面显示‘DANGER!!!’字符,警示倾斜角度过大。
图2-3 LCD1602引脚图2.2.3单片机选用单片机选用的是STC89C51系列,具体资料参见1.4节STC89C51简介。
2.2.4报警电路根据设计要求,当倾斜角度超过设定报警角度时,要报警;本方案中的报警思想是:倾斜角超过上限报警家督时,通过I/O口发出控制信号,控制蜂鸣器发生模拟报警。
如图2-5,图2-5 报警电路第三章硬件设计3.1 传感器硬件电路传感器与单片机的连接如图3-1图3-1 传感器与单片机连接图传感器选用倾斜角传感器ADXL345,按照图3-1连接,此时传感器输出量为数字量,数字输出到角度转化公式为:α= arcsin[(Dout -Dout@0°)/ Sensitivity] 其中Dout为X或Y通道的数字输出量,Dout@0°为0°时X或Y通道的数字输出量,Sensitivity芯片灵敏度为1638LSB/g。
3.2 液晶显示器硬件电路LCD1602显示器与单片机的连接如图3-2图3-2显示器与单片机连接图LCD1602液晶模块内部的字符发生器(CGROM)已经存储了160个不同的点阵字符图形,这些字符有:阿拉伯数字、英文字母的大小写、常用的符号和日文假名等,每一个字符都有一定的代码,比如大写字母‘A’的代码是01000001(41H),显示时模块把地址41H中的点阵字符图形显示出来,我们就可以看到‘A’。
因此,传感器测得的倾斜角经过单片机软件处理程序处理后,通过P0口输出即可显示。
3.3 报警电路报警电路如图3-4图3-4 报警电路(1)R1、R2的选择当通过LED的电流为3~5mA时,LED就可以发光;忽略LED的内阻,分析计算得:R1(R2)=5V/5mA=1000Ω=1KΩ(2)蜂鸣器外围电路设计如图所示,当三极管8550基极电压为0时,三极管工作,蜂鸣器就可以发声,R3、R4均为限流作用,同时也与电容一起起到保护电路的作用。
3.5 总硬件原理图综合前几节的分析可得设计的总体硬件原理图,如图3-5图3-5 总体硬件原理图第4章软件设计4.1 软件的功能需求因为所采用的传感器是直接输出数字量的,所以程序的编写就变的简单了。
不需要进行A/D转换了。
而且因为传感器输出的时间和单片机处理的速度很匹配所以我们也没有进行中断处理。
采用的是查询的方式。
软件的功能主要包括:(1)能在LCD上面显示传感器传出的角度。
(2)判断值是否在报警范围内从而做出不同的判断。
(3)能进行串口通信。
4.2 各部分程序框图图4-1 总体软件原理框图图4-2 LCD显示子程序图4-3 倾斜角采集框图图4-4 报警程序框图第九章参考文献程德福、林君、智能仪器、2009、机械工业出版社张毅刚、单片机原理及应用、2010、高等教育出版社附录附录一:元器件清单STC89C52单片机1个MAX232串行接口1个ADXL345倾斜角传感器1个LCD1602液晶显示器1个蜂鸣器1个LED发光二极管2个三极管8550 1个1K电阻3个10K电阻2个470电阻1个10K滑动变阻器1个0.1uF电容6个30pF电容2个10uF电解电容2个12MHz晶振1个附录二:完整程序#include "1602.h"#include "delay.h"sbit RS = P3^6; //定义端口sbit RW = P3^5;sbit EN = P3^4;#define RS_CLR RS=0#define RS_SET RS=1#define RW_CLR RW=0#define RW_SET RW=1#define EN_CLR EN=0#define EN_SET EN=1#define DataPort P1/*------------------------------------------------判忙函数------------------------------------------------*/ bit LCD_Check_Busy(void){DataPort= 0xFF;RS_CLR;RW_SET;EN_CLR;_nop_();EN_SET;return (bit)(DataPort & 0x80);}/*------------------------------------------------写入命令函数------------------------------------------------*/ void LCD_Write_Com(unsigned char com){while(LCD_Check_Busy()); //忙则等待RS_CLR;RW_CLR;EN_SET;DataPort= com;_nop_();EN_CLR;}/*------------------------------------------------写入数据函数------------------------------------------------*/ void LCD_Write_Data(unsigned char Data){while(LCD_Check_Busy()); //忙则等待RS_SET;RW_CLR;EN_SET;DataPort= Data;_nop_();EN_CLR;}/*------------------------------------------------清屏函数------------------------------------------------*/ void LCD_Clear(void){LCD_Write_Com(0x01);DelayMs(5);}/*------------------------------------------------写入字符串函数------------------------------------------------*/void LCD_Write_String(unsigned char x,unsigned char y,unsigned char *s) {if (y == 0){LCD_Write_Com(0x80 + x); //表示第一行}else{LCD_Write_Com(0xC0 + x); //表示第二行}while (*s){LCD_Write_Data( *s);s ++;}}/*------------------------------------------------写入字符函数------------------------------------------------*/void LCD_Write_Char(unsigned char x,unsigned char y,unsigned char Data) {if (y == 0){LCD_Write_Com(0x80 + x);}else{LCD_Write_Com(0xC0 + x);}LCD_Write_Data( Data);}/*------------------------------------------------初始化函数------------------------------------------------*/void LCD_Init(void){LCD_Write_Com(0x38); /*显示模式设置*/DelayMs(5);LCD_Write_Com(0x38);DelayMs(5);LCD_Write_Com(0x38);DelayMs(5);LCD_Write_Com(0x38);LCD_Write_Com(0x08); /*显示关闭*/LCD_Write_Com(0x01); /*显示清屏*/LCD_Write_Com(0x06); /*显示光标移动设置*/DelayMs(5);LCD_Write_Com(0x0C); /*显示开及光标设置*/}void LCD_cursor(unsigned char X,unsigned char Y){if (Y == 0){LCD_Write_Com(0x80 + X);}else{LCD_Write_Com(0xC0 + X);}LCD_Write_Com(0x0e);}#include "ADXL345.h"#include "delay.h"#define uchar unsigned char#define uint unsigned int//使用的端口,请按照以下接线sbit SCL=P0^6; //IIC时钟引脚定义sbit SDA=P0^5; //IIC数据引脚定义typedef unsigned char BYTE;typedef unsigned short WORD;#define SlaveAddress 0xA6 //定义器件在IIC总线中的从地址,根据ALT ADDRESS地址引脚不同修改extern uchar BUF[8]; //接收数据缓存区/**************************************起始信号**************************************/ void ADXL345_Start(){SDA = 1; //拉高数据线 SCL = 1; //拉高时钟线 Delay5us(); //延时SDA = 0; //产生下降沿 Delay5us(); //延时SCL = 0; //拉低时钟线}/**************************************停止信号**************************************/ void ADXL345_Stop(){SDA = 0; //拉低数据线 SCL = 1; //拉高时钟线 Delay5us(); //延时SDA = 1; //产生上升沿 Delay5us(); //延时}/**************************************发送应答信号入口参数:ack (0:ACK 1:NAK)**************************************/ void ADXL345_SendACK(bit ack){SDA = ack; //写应答信号 SCL = 1; //拉高时钟线 Delay5us(); //延时SCL = 0; //拉低时钟线 Delay5us(); //延时}/**************************************接收应答信号**************************************/bit ADXL345_RecvACK(){SCL = 1; //拉高时钟线 Delay5us(); //延时CY = SDA; //读应答信号SCL = 0; //拉低时钟线Delay5us(); //延时return CY;}/**************************************向IIC总线发送一个字节数据**************************************/void ADXL345_SendByte(BYTE dat){BYTE i;for (i=0; i<8; i++) //8位计数器{dat <<= 1; //移出数据的最高位SDA = CY; //送数据口SCL = 1; //拉高时钟线Delay5us(); //延时SCL = 0; //拉低时钟线Delay5us(); //延时}ADXL345_RecvACK();}/**************************************从IIC总线接收一个字节数据**************************************/BYTE ADXL345_RecvByte(){BYTE i;BYTE dat = 0;SDA = 1; //使能内部上拉,准备读取数据, for (i=0; i<8; i++) //8位计数器{dat <<= 1;SCL = 1; //拉高时钟线Delay5us(); //延时dat |= SDA; //读数据SCL = 0; //拉低时钟线Delay5us(); //延时}return dat;}//******单字节写入*******************************************void Single_Write_ADXL345(uchar REG_Address,uchar REG_data){ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号ADXL345_SendByte(REG_Address); //内部寄存器地址,请参考中文pdf22页ADXL345_SendByte(REG_data); //内部寄存器数据,请参考中文pdf22页ADXL345_Stop(); //发送停止信号}//********单字节读取*****************************************uchar Single_Read_ADXL345(uchar REG_Address){ uchar REG_data;ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号ADXL345_SendByte(REG_Address); //发送存储单元地址,从0开始ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress+1); //发送设备地址+读信号REG_data=ADXL345_RecvByte(); //读出寄存器数据ADXL345_SendACK(1);ADXL345_Stop(); //停止信号return REG_data;}//*********************************************************////连续读出ADXL345内部加速度数据,地址范围0x32~0x37////*********************************************************void Multiple_read_ADXL345(void){ uchar i;ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress); //发送设备地址+写信号ADXL345_SendByte(0x32); //发送存储单元地址,从0x32开始ADXL345_Start(); //起始信号ADXL345_SendByte(SlaveAddress+1); //发送设备地址+读信号 for (i=0; i<6; i++) //连续读取6个地址数据,存储中BUF{BUF[i] = ADXL345_RecvByte(); //BUF[0]存储0x32地址中的数据if (i == 5){ADXL345_SendACK(1); //最后一个数据需要回NOACK}else{ADXL345_SendACK(0); //回应ACK}}ADXL345_Stop(); //停止信号Delay5ms();}//*****************************************************************//初始化ADXL345,根据需要请参考pdf进行修改************************ void Init_ADXL345(){Single_Write_ADXL345(0x31,0x0B); //测量范围,正负16g,13位模式 Single_Write_ADXL345(0x2C,0x08); //速率设定为12.5 参考pdf13页 Single_Write_ADXL345(0x2D,0x08); //选择电源模式参考pdf24页 Single_Write_ADXL345(0x2E,0x80); //使能 DATA_READY 中断Single_Write_ADXL345(0x1E,0x00); //X 偏移量根据测试传感器的状态写入pdf29页Single_Write_ADXL345(0x1F,0x00); //Y 偏移量根据测试传感器的状态写入pdf29页Single_Write_ADXL345(0x20,0x05); //Z 偏移量根据测试传感器的状态写入pdf29页}#include "1602.h"#include "delay.h"sbit RS = P3^6; //定义端口sbit RW = P3^5;sbit EN = P3^4;#define RS_CLR RS=0#define RS_SET RS=1#define RW_CLR RW=0#define RW_SET RW=1#define EN_CLR EN=0#define EN_SET EN=1#define DataPort P1/*------------------------------------------------判忙函数------------------------------------------------*/ bit LCD_Check_Busy(void){DataPort= 0xFF;RS_CLR;RW_SET;EN_CLR;_nop_();EN_SET;return (bit)(DataPort & 0x80);}/*------------------------------------------------写入命令函数------------------------------------------------*/ void LCD_Write_Com(unsigned char com){while(LCD_Check_Busy()); //忙则等待RS_CLR;RW_CLR;EN_SET;DataPort= com;_nop_();EN_CLR;}/*------------------------------------------------写入数据函数------------------------------------------------*/ void LCD_Write_Data(unsigned char Data){while(LCD_Check_Busy()); //忙则等待RS_SET;RW_CLR;EN_SET;DataPort= Data;_nop_();EN_CLR;}/*------------------------------------------------清屏函数------------------------------------------------*/void LCD_Clear(void){LCD_Write_Com(0x01);DelayMs(5);}/*------------------------------------------------写入字符串函数------------------------------------------------*/void LCD_Write_String(unsigned char x,unsigned char y,unsigned char *s) {if (y == 0){LCD_Write_Com(0x80 + x); //表示第一行}else{LCD_Write_Com(0xC0 + x); //表示第二行}while (*s){LCD_Write_Data( *s);s ++;}}/*------------------------------------------------写入字符函数------------------------------------------------*/void LCD_Write_Char(unsigned char x,unsigned char y,unsigned char Data) {if (y == 0){LCD_Write_Com(0x80 + x);}else{LCD_Write_Com(0xC0 + x);}LCD_Write_Data( Data);}/*------------------------------------------------初始化函数------------------------------------------------*/ void LCD_Init(void){LCD_Write_Com(0x38); /*显示模式设置*/DelayMs(5);LCD_Write_Com(0x38);DelayMs(5);LCD_Write_Com(0x38);DelayMs(5);LCD_Write_Com(0x38);LCD_Write_Com(0x08); /*显示关闭*/LCD_Write_Com(0x01); /*显示清屏*/LCD_Write_Com(0x06); /*显示光标移动设置*/ DelayMs(5);LCD_Write_Com(0x0C); /*显示开及光标设置*/}void LCD_cursor(unsigned char X,unsigned char Y) {if (Y == 0){LCD_Write_Com(0x80 + X);}else{LCD_Write_Com(0xC0 + X);}LCD_Write_Com(0x0e);}#include <REG52.H>#include <math.h> //Keil library#include <stdio.h> //Keil library#include "1602.h"#include "delay.h"#include "ADXL345.h"#include "uart.h"sbit Key1=P2^2; //度数设置键sbit Key2=P2^7; //加键sbit Key3=P0^1; //减键sbit Key4=P0^0; //返回设置键sbit Speak=P2^0;#define uchar unsigned char#define uint unsigned intuchar BUF[8]; //接收数据缓存区uchar ge,shi,bai,qian,wan; //显示变量uchar Flag;uchar angle_flag=0;int dis_data; //变量unsigned char counter; //时间时分秒选项计数,1:设置小时,2:设置分钟,3:设置秒int Angle_up=40; //角度报警上限int Angle_down=30; //角度报警下限int max,min;void conversion(uint temp_data);int angle_int;int dis_data; //变量float Roll,Pitch,zz,Q,T,K;//-----------------------------------//*********************************************************void conversion(uint temp_data){unsigned char aa,bb,cc;wan=temp_data/10000+0x30 ;temp_data=temp_data%10000; //取余运算aa=temp_data/1000;qian=temp_data/1000+0x30 ;temp_data=temp_data%1000; //取余运算bb=temp_data/100;bai=temp_data/100+0x30 ;temp_data=temp_data%100; //取余运算cc=temp_data/10;shi=temp_data/10+0x30 ;temp_data=temp_data%10; //取余运算ge=temp_data+0x30;angle_int=aa*100+bb*10+cc;}//******************************************************************* ****//显示x轴void display_x(){dis_data=(BUF[1]<<8)+BUF[0]; //合成数据if(dis_data<0){dis_data=-dis_data;LCD_Write_Char(10,0,'-'); //显示正负符号位}else LCD_Write_Char(10,0,' '); //显示空格Q=(float)dis_data*3.9; //计算数据和显示,查考ADXL345快速入门第4页conversion(Q); //转换出显示需要的数据LCD_Write_Char(8,0,'X');LCD_Write_Char(9,0,':');LCD_Write_Char(11,0,qian);LCD_Write_Char(12,0,'.');LCD_Write_Char(13,0,bai);LCD_Write_Char(14,0,shi);LCD_Write_Char(15,0,' ');}//******************************************************************* ****//显示y轴void display_y(){dis_data=(BUF[3]<<8)+BUF[2]; //合成数据if(dis_data<0){dis_data=-dis_data;LCD_Write_Char(2,1,'-'); //显示正负符号位}else LCD_Write_Char(2,1,' '); //显示空格T=(float)dis_data*3.9; //计算数据和显示,查考ADXL345快速入门第4页conversion(T); //转换出显示需要的数据LCD_Write_Char(0,1,'Y'); //第1行,第0列显示yLCD_Write_Char(1,1,':');LCD_Write_Char(3,1,qian);LCD_Write_Char(4,1,'.');LCD_Write_Char(5,1,bai);LCD_Write_Char(6,1,shi);LCD_Write_Char(7,1,' ');}//******************************************************************* ****//显示z轴void display_z(){dis_data=(BUF[5]<<8)+BUF[4]; //合成数据if(dis_data<0){dis_data=-dis_data;LCD_Write_Char(10,1,'-'); //显示负符号位}else LCD_Write_Char(10,1,' '); //显示空格K=(float)dis_data*3.9; //计算数据和显示,查考ADXL345快速入门第4页conversion(K); //转换出显示需要的数据LCD_Write_Char(8,1,'Z'); //第0行,第10列显示ZLCD_Write_Char(9,1,':');LCD_Write_Char(11,1,qian);LCD_Write_Char(12,1,'.');LCD_Write_Char(13,1,bai);LCD_Write_Char(14,1,shi);LCD_Write_Char(15,1,' ');}void KeyScan(void) //按键扫描{unsigned char temp[3];//定义显示区域临时存储数组if(Key1 == 0) //调角度状态{DelayMs(10); //消抖if(Key1 == 0){Flag=1;counter++;if(counter>2)counter = 1;angle_flag++;if(angle_flag==1){LCD_Clear();LCD_Write_Com(0x0c);temp[0]=Angle_up%100/10+'0';temp[1]=Angle_up%10+'0';LCD_Write_String(0,0,"Angle_up :");LCD_Write_String(13,0,temp);temp[0]=Angle_down%100/10+'0';temp[1]=Angle_down%10+'0';LCD_Write_String(0,1,"Angle_down: ");LCD_Write_String(13,1,temp);}}while(Key1 == 0);//等待键松开}if(Key4 == 0) //返回状态{DelayMs(10);if(Key4 == 0){if((Flag==1&&Angle_up>Angle_down)) //角度上限必须大于角度下限才能退出{counter=0;Flag=0;LCD_Write_Com(0x0c);//关闭光标LCD_Clear();angle_flag=0;}}while(Key4 == 0);//等待键松开}}void Set_angle(unsigned char sel){unsigned char temp[3];if(sel==2) {max=90;min=1;LCD_cursor(14,1);} //angle_downif(sel==1) {max=89;min=0;LCD_cursor(14,0);} //angle_up if(Key3 == 0){DelayMs(10);if(Key3 == 0){if(sel==1){Angle_up++;if(Angle_up>max) Angle_up=min;//查看数值有效范围if(Angle_up<min) Angle_up=max;LCD_Write_Com(0x0c); //光标关闭,不关闭后边显示相应会显示光标temp[0]=Angle_up%100/10+'0';temp[1]=Angle_up%10+'0';LCD_Write_Char(13,0,temp[0]);LCD_Write_Char(14,0,temp[1]);}if(sel==2){Angle_down++;if(Angle_down>max) Angle_down=min;//查看数值有效范围if(Angle_down<min) Angle_down=max;LCD_Write_Com(0x0c); //光标关闭,不关闭后边显示相应会显示光标temp[0]=Angle_down%100/10+'0';temp[1]=Angle_down%10+'0';LCD_Write_Char(13,1,temp[0]);LCD_Write_Char(14,1,temp[1]); }}while(Key3 == 0);//等待键松开}if(Key2 == 0){DelayMs(10);if(Key2 == 0){if(sel==1){Angle_up--;if(Angle_up>max) Angle_up=min;//查看数值有效范围if(Angle_up<min) Angle_up=max;LCD_Write_Com(0x0c); //光标关闭,不关闭后边显示相应会显示光标temp[0]=Angle_up%100/10+'0';temp[1]=Angle_up%10+'0';LCD_Write_Char(13,0,temp[0]);LCD_Write_Char(14,0,temp[1]);}if(sel==2){Angle_down--;if(Angle_down>max) Angle_down=min;//查看数值有效范围if(Angle_down<min) Angle_down=max;LCD_Write_Com(0x0c); //光标关闭,不关闭后边显示相应会显示光标temp[0]=Angle_down%100/10+'0';temp[1]=Angle_down%10+'0';LCD_Write_Char(13,1,temp[0]);LCD_Write_Char(14,1,temp[1]);}}while(Key2 == 0);//等待键松开}}//*********************************************************//******主程序********//*********************************************************void main(){uchar devid;counter=0;Flag=0;angle_flag=0;UART_Init();LCD_Init(); //液晶初始化ADXL345Init_ADXL345(); //初始化ADXL345devid=Single_Read_ADXL345(0X00); //读出的数据为0XE5,表示正确while(1) //循环{KeyScan();if(Flag==0){Multiple_Read_ADXL345(); //连续读出数据,存储在BUF 中display_x(); //---------显示X轴display_y(); //---------显示Y轴display_z(); //---------显示Z轴Roll=(float)(90-((atan2(K,Q)*180)/3.1416)); //X轴角度值conversion(Roll*10); //转换出显示需要的数据 LCD_Write_Char(0,0,'Q'); //第0行,第10列显示Z LCD_Write_Char(1,0,':');LCD_Write_Char(2,0,bai);LCD_Write_Char(3,0,shi);LCD_Write_Char(4,0,'.');LCD_Write_Char(5,0,ge);UART_Put_Inf("倾角:" ,Roll);UART_Put_Inf("倾角报警上限:" ,Angle_up);UART_Put_Inf("倾角报警下限:" ,Angle_down);if(Roll>Angle_down&&Roll<Angle_up){Speak=0;UART_Send_Str("倾角超限,请注意! \n");}elseSpeak=1;}if(Flag==1){Speak=1;Set_angle(counter);}}}31。