sharp红外测距传感器
知名厂商热门MCU芯片应用(一):ADSP系列

知名厂商热门MCU芯片应用(一):ADSP系列AD SP——美国模拟器件公司(ADI:Analog Device Instrument)生产的数字信号处理芯片(DSP:Digital Singal Process or),代表系列有 ADSP Sharc 211xx (低端领域),ADSP Ti ge rS harc 101,201(高端领域),ADSP Bl ac kfin 系列(消费电子领域)。
ADSP与另外一个著名的德州仪器(TI:Te xas Instrument)生产的芯片特点相比较,具有浮点运算强,SIM D(单指令多数据)编程的优势,比较新的Blackfin系列比同一级别TI产品功耗低。
缺点是ADSP不如TI的C语言编译优化好.TI已经普及了C语言的编程,而AD芯片的性能发挥比较依赖程序员的编程水平.ADSP的Linkport数据传输能力强是一大特色,但是使用起来不够稳定,调试难度大。
ADI提供的Visual DSP ++2.0, 3.0, 4.0, 4.5 编程环境,可以支持软件人员开发调试。
下面是电子发烧友网编辑推荐的几个关于ADSP系列芯片的一些典型应用。
一、一种基于ADSP-2188M的多传感器数据采集系统摘要:在移动智能体的研制中,能够实时地探测周围环境信息的传感器系统是至关重要的。
本文介绍了一种以DSP-ADSP-2188M为核心的传感器数据采集系统的软、硬件设计和工作原理,以及与上位机通信的设计和实现过程。
该系统可以应用于移动机器人、智能轮椅、自动制导车辆等移动智能系统中。
引言在自主移动机器人系统、智能轮椅、自动制导车辆等智能移动系统中,需要实时地采集未知和不确定环境中的信息,以完成避障、环境地图绘制、导航、定位等运作,然后进行路径规划等任务。
这些任务必须依靠能实时感知环境信息的传感器系统来完成。
为了在复杂环境中获取有效的信息,这些系统往往安装有种类各异的传感器。
目前,常用的有视觉、激光、红外、超声等传感器。
红外 测距传感器 原理
红外测距传感器原理
红外测距传感器是一种常见于机器人、自动化控制系统等领域的传感器,其主要原理是利用红外光线的特性进行距离测量。
红外光线是一种波长在可见光波长下方但高于无线电波的光线,它在空气中传播时不受可见光的干扰,可以穿过一些物体,因此应用广泛。
红外测距传感器通常由红外光发射器和接收器两部分组成。
红外光发射器会发射一束红外光线,光线经过物体后会被反射回来,接收器会接收到这个反射信号,并通过计算反射时间来确定物体与传感器之间的距离。
由于红外光线在空气中传播速度是已知的,因此可以通过测量反射时间来计算距离。
红外测距传感器的精度和测量范围受到多种因素的影响,例如光束的扩散、环境光的干扰等。
因此在使用红外测距传感器时需要注意选择合适的型号,以及考虑到环境因素对测量结果的影响。
总之,红外测距传感器是一种非常有用的测量工具,在机器人、自动化控制系统等领域有着广泛的应用前景。
- 1 -。
灭火机器人的设计中需要的传感器使用方法

灭火机器人的设计中需要的传感器使用方法在灭火机器人中主要使用了三类传感器,火焰传感器是用来探测火焰的;红外传感器用来测量小车到墙壁的距离,用来定位;灰度传感器主要是用来识别地面的白线。
一、火焰传感器。
远红外火焰探头将外界红外光的变化转化为电流的变化,通过 A/D转换器反映为 0~1023 范围内的数值。
外界红外光越强,数值越小。
因此越靠近热源,机器人显示读数越小。
根据函数返回值的变化能判断红外光线的强弱,从而能大致判别出火源的远近。
此外,远红外火焰探头探测角度为60°。
火焰传感器的原理图如下:使用中在火焰传感器上串联了一个电位器,这样便可以调整传感器的灵敏度。
在不同光线环境下,直接调整电位器,即可减少外界光对传感器的影响。
在以往的比赛中,一般都在机器人前方加装三个以上的火焰传感器来探测火焰,这样机器人到达房间门口即可感应到火焰是否存在,但是这种方案容易受相机闪光灯、阳光等影响,所以本系统中未采用。
本系统中采用的是单传感器加舵机的方案。
取一不透光黑色胶卷筒,在其尾部钻孔,将火焰传感器装入其中,再将胶卷筒固定在舵机舵盘上。
这样,火焰传感器就能随舵机转动,在转动的过程中进行A/D采样,实验证明抗干扰能力很好。
并且小车距离火焰2.6cm以外即可“看”到底部距地面15cm~20cm高度不定的火焰,满足比赛要求。
二、红外测距传感器。
红外测距传感器使用的是SHARP公司的GP2D12集成高精度传感器,测量有效距离为10cm~80cm,对应输出电压为2.5V~0V。
传感器外形及距离-电压曲线图如下:本系统中共使用了三个红外测距传感器(以下简称PSD),一个装于机器人正前方,另外两个分别装于机器人两侧,与前方PSD成90度。
主要用这三个PSD 来测量前方、左方、右方离开墙壁的距离。
但是在使用该传感器的过程中有很多不当的地方在此作一些说明。
传感器安装错误。
在组装机器人时,为了安装方便将传感器安装成如图4-4所示,这样安装就使得机器人在沿墙走的过程中如果遇到内角拐弯时就必需不断配合检测前方传感器的值才能完成拐弯动作如图4-6,增加了程序的复杂性,降低了系统的可靠性。
红外测距传感器工作原理

红外测距传感器工作原理红外测距传感器工作原理是通过发射红外光束来测量目标物体与传感器的距离。
红外测距传感器主要由红外发射器和红外接收器两部分组成。
红外发射器是利用LED(发光二极管)发射红外线的一个元件,其内部由发光二极管芯片和外部吸收层组成。
发光二极管芯片受到正极电压的驱动后,内部活性物质发生受激辐射,产生红外线辐射。
红外接收器是通过接收到红外线并转化为电信号来实现测距的一个元件。
红外接收器的核心是红外敏感元件,常用的包括光敏二极管、光敏电阻和光敏三极管等。
红外敏感元件在受到红外线照射后,会产生一定的电流或电阻变化,进而转化为可测量的电信号。
在红外测距传感器工作时,首先红外发射器会发射红外光束,该光束经过传感器的特殊光学元件(如凸透镜)进行聚焦和发散,然后照射在目标物体上。
目标物体表面会对红外光产生反射、散射和吸收,其中一部分红外光经过反射、散射后再次进入传感器的接收器中。
红外接收器接收到这部分红外光后,红外敏感元件会产生对应的电流或电阻变化信号。
根据目标物体与红外测距传感器的距离不同,接收到的红外光的强度也会有所不同。
通常情况下,目标物体越远离传感器,接收到的红外光的强度越弱;目标物体越靠近传感器,接收到的红外光的强度越强。
通过测量红外接收器输出的电流或电阻变化信号的强度,红外测距传感器可以计算得出目标物体与传感器之间的距离。
为了提高测量的精度和准确性,红外测距传感器通常会采用一系列的技术和方法来进行校准和装置设计。
例如,传感器可以通过在不同的距离下进行标定,建立起距离与输出信号之间的关系曲线。
通过对测得的输出信号进行算法分析和处理,可以精确地测量目标物体与传感器之间的距离。
红外测距传感器工作原理简单易懂,且具有较高的测量精度和稳定性。
因此,在很多应用领域,如无人机定位导航、机器人感知、智能家居和安防监控等方面,红外测距传感器被广泛使用。
创意之星机器人说明

v1.0 可编辑可修改创意之星机器人说明书目录1结构套件简介 ............................................................................ .. (3)结构件概述 ............................................................................ (3)C o n n F L E X连接结构 ............................................................................ (3)不同版本 ............................................................................ . (4)使用零件3D模型 ............................................................................ . (6)2控制器及电源 ............................................................................ .. (7)M u l t i F L E X™2-A V R控制器 ............................................................................ (8)M u l t i F L E X™2-P X A270控制器 ............................................................................ (9)电池和直流电源 ............................................................................ (12)3传感器............................................................................. .. (12)传感器的信号类型及电气规范 ............................................................................ (13)“创意之星”传感器接口 ............................................................................ (14)接近传感器 ............................................................................ .. (16)测距传感器 ............................................................................ . (19)声音传感器 ............................................................................ . (24)碰撞传感器 ............................................................................ . (26)倾覆传感器 ............................................................................ . (26)温度传感器 ............................................................................ . (27)光强传感器 ............................................................................ . (27)灰度传感器 ............................................................................ (28)视觉和语音传感器 ............................................................................ (28)4执行器............................................................................. (29)C D S5516机器人舵机 ............................................................................ .. (29)C D S5401大扭矩R/C舵机 ............................................................................ .. (32)B D M C1203电机驱动模块 ............................................................................ (33)F a u l h a b e r大功率减速电机............................................................................. .. (34)5N o r t h S T A R图形化开发环境 ............................................................................ (35)安装及使用介绍 ............................................................................ . (35)使用流程图开发 ............................................................................ (39)手写代码开发 ............................................................................ . (46)调试与在线监控 ............................................................................ (47)6其它部件............................................................................. (54)U P-D e b u g g e r下载调试器 ............................................................................ .. (54)W i F i无线网卡或以太网线缆............................................................................. (55)Z i g B e e无线模组 ............................................................................ .. (56)1结构套件简介结构件概述“创意之星”是一种模块化机器人组件,其特点是组成机器人的各种零件都是通用、可重组的,各个零件之间有统一的连接方式,零件之间可以自由组合,从而构建出各种各样的机器人构型。
红外距离传感器产品参考手册说明书

Laser type and high power narrow beam LED type BGS! Types with sensing distances of 100 mm and 300 mm Industry standard sizeHighly accurate height difference detection through low hysteresisRelatedproductsUniversal voltage typeBGS-2VP.384Higher accuracyBGS-HL,BGS-HDLP.310Transparent object detectionZ3R-QP.404 Selection tableFor the connector type, please purchase an optional JCN series connector cable.Options/AccessoriesConnector cablesL-shapedJCN-SCable length: 2 mJCN-5SCable length: 5 mJCN-10SCable length: 10 mJCN-LCable length: 2 mJCN-5LCable length: 5 mJCN-10LCable length: 10 mProtective mounting bracketUltra-durable 2 mm thick typeRust-resistant stainless steelS ensor is firmly secured using M3 Hexsocket head cap screwsT he bracket is also firmly secured usingM6 screwsLK-S01LK-S02 Meander detection of sheet materials Detection of multi-colored trays Detection of items on stainless steel lines Laser type application 1LED type application 1LED type application 2Straight326Laser, standard type BGS-ZL, BGS-Z seriesLaser types (Class 1) and high power narrow beam LED types are availableIdeal for height difference detection using low hysteresisIndustry standard sizeShort-range type hysteresis ≤ 3% (typical value)Mounting hole pitch: 25.4 mmLaser type (equipped with laser OFF input)High power narrow beam LED light source typeThe spot size of the laser type is ø1 mm at 100 mm (short-range type). Optimal for applications that in which small object detection and high repeat accuracy are required. It is also a Class 1 laser in which eye protection for workers is not necessary.*Classified as Class II in the US FDA standards.A short-range type with a sensing distance of 100 mm that achieves a low hysteresis of ≤ 3%. Demonstrates its strength in small height difference detection.* A mid-range type with a sensing distance of 300 mm that achieves a hysteresis of ≤ 5%.Features an industry standard pitch of 25.4 mm.Features a high power narrow beam LED light source . Because the spot light can be seen clearly even in brightfactories regardless of the LED light, confirmation of detection position is easier than for any other conventional model.*Compared to conventional models: Using LED light source.Laser typeH y s t e r e s i s (%)Sensing distance X (mm)High power narrow beam LED typeH y s t e r e s i s (%)Sensing distance X (mm)Laser, standard type BGS-ZL, BGS-Z seriesSpecifications*2. Classified as Class II in the US FDA standards.*3. D efined with center strength 1/e 2 (13.5%). There may be light leakage outside of the specified spot size. The sensor may be affected when there is a highly reflective object close to the target area.*4. Mounting bracket BEF-W100-A is included with the connector type.Specifications are subject to change without prior notice for product improvement purposes.Laser, standard type BGS-ZL, BGS-Z seriesI/O circuit diagramNPN output typePNP output typeConnector typeConnecting1 to 4 are connector pin No.NotesC onnect frame ground to the earth when the switching regulator is used for power supply. B ecause wiring sensor wires with high-voltage wires or power supply wires can result in malfunctions due to noise, which can cause damage, make sure to wire separately. Avoid using the transient state while the power is on (approx. 100 ms). T he connector direction is fixed as in the drawing to the right when you use L-shaped connector cable. Be aware that rotation is not possible.This product emits a Class 1 (II) visible laser beam that is compliant with IEC/JIS, FDA laser safety standards.Warning and explanation labels are affixed to the sides of the sensor.Laser type: BGS-ZL10 /BGS-ZL30Laser light precautions1 10 to 30 VDC2 Laser OFF input (laser type only)3 0 V4 Control output(Pin con guration)Sensor sideConnector cable sideWarningDo not look directly at the laser or intentionally shine the laser beam in another person’s eyes.Laser, standard type BGS-ZL, BGS-Z seriesDimensionsSensorConnector cable (optional)Cable typeConnector typeJCN-S, JCN-5S, JCN-10SJCN-L, JCN-5L, JCN-10L(Unit: mm)Light ON / Dark ONselection switchOutput indicator (orange)Light ON / Dark ONselection switchø4.7, 4-wire × 0.325 mm 2ø4.7, 4-wire × 0.325 mm 2Laser, standard type BGS-ZL, BGS-Z seriesConnector type (when using BEF-W100-A)(Unit: mm)Mounting bracketCable type (when using BEF-W100-B)Laser, standard type BGS-ZL, BGS-Z seriesTypical characteristic dataBGS-ZL10 Laser typeBGS-ZL30 Laser type③S e n s i n g a r e a Y (m m )④③Distance X (mm)④③D i s t a n c eY (m m )④③Sensing distance X (mm)④③Sensing distance (mm)④③Sensing distance (mm)④③H y s t e r e s i s (%)④③S e n s i n g d i s t a n c e (m m )④W h i t e p a p e rB l a c k p a p e rV e n e e b o a r d C a r d b o a r dB l a c k r u b b e rB l a c k s p o n g ③S e n s i n g a r e a Y (m m )④③D i s t a n c e Y(m m )④③H y s t e r e s i s (%)④Hysteresis51002003001015203025③S e n s i n g d i s t a n c e (m m )④③O p t i c a l p l a n e ④③Sensing distance X (mm)④③Sensing distance (mm)④③Distance X (mm)④③Sensing distance (mm)④White paperGray paper/white paper Black paper/white paperW h i t e p a p e rB l a c k p a p e rV e n e e b o a r dC a r d b o a r dB l a c k r u b b e rB l a c k s p o n gLaser, standard type BGS-ZL, BGS-Z seriesBGS-Z10 LED typeBGS-Z30 LED type③S e n s i n g d i s t a n c e (m m )④③S e n s i n g a r e a Y (m m )④③Distance X (mm)④③D i s t a n c e Y (m m )④③Sensing distance X (mm)④③O p t i c a l p l a n e ④③Sensing distance (mm)④③H y s t e r e s i s (%)④③Sensing distance (mm)④W h i t e p a p e rB l a c k p a p e rV e n e e b o a r dC a r d b o a rdB l a c k r u b b e rB l a c k s p o n g③S e n s i n gd i s t a n ce (m m )④③H y s t e r e s i s (%)④③Sensing distance (mm)④③S e n s i n g a r e a Y (m m )④③D i s t a n c e Y (m m )④③Sensing distanceX (mm)④③Distance X (mm)④1020304050③Sensing distance (mm)④③O p t i c a l p l a n e ④5W h i t e p a p e rB l a c k p a p e rV e n e e b o a r dC a r d b o a r dB l a c k r u b b e rB l a c k s p o n g。
Panasonic GridEYE 红外感应器FAQ说明书
Normal mode: Frame rate can be 1 frame/s or 10 frames/s Stand-by mode: Frame rate is same than Normal Mode but temperature register is only updated every 10 or 60 sec Sleep mode: Temperature register is not updated Reading and writing is possible while all 3 modes!
FAQ
Is the typ. power consumption different with different frame rates?
No, the typ. power consumption is always the same.
4 FAQ – GridEYE Sensor
Panasonic
What is the recommended wavelength of GridEYE?
The lens and the optical filter of GridEYE form a band-pass characteristic for wavelengths between 5 and 13μm.
2 FAQ – GridEYE Sensor
Panasonic
FAQ
What ist the set up time after “Initial Reset” (GridEYE always powerd on)
夏普GP2Y0AH01K0F型高精度位移传感器说明书

GP2Y0AH01K0FGP2Y0AH01K0FHigh-precision Displacement Sensor UnitMeasuring distance: 4.5 to 6.0 mm Analog output type■Applications1. Copier2. Multi-function equipment3. Laser beam printer■Features1. High-accuracy typeDistance measuring range : 4.5 to 6.0 mm 2. Analog output type3. Package size : 27×21.2×8.5 mm4. Consumption current : Typ. 20 mA5. Supply voltage : 4.5 to 5.5 V6. Resolution : 50μm■Agency approvals/Compliance1. Compliant with RoHS directive(2002/95/EC)2. Content status of six substances specified in“ Management Methods for Control of Pollution Caused by Electronic Information Products Regulation ” (popular name : China RoHS )(Chinese : 电子信息产品污染控制管理办法); refer to page 7Notice The content of data sheet is subject to change without prior notice.In the absence of confirmation by device specification sheets, SHARP takes no responsibility for any defects that may occur in equipment using any SHARP ■DescriptionGP2Y0AH01K0F is a distance measuring sensor unit,composed of an integrated combination of PSD(position sensitive detector) , IRED (infrared emitting diode) and signal processing circuit.The variety of the reflectivity of the object, theenvironmental temperature and the operating duration are not influenced easily to the distance detection because of adopting the triangulation method.This device outputs the voltage corresponding to the detection distance. So this sensor can also be used as a proximity sensor.■Block diagram■Outline Dimensions(Unit : mm)Product mass : approx. 3.0gSignalprocessing circuitPSDLEDDistance measuring ICVoltage regulatorOscillation circuitOutput circuitLED drive circuit①V O②GND③V CCTerminalSymbol ①Output terminal voltage V O ②GroundGND ③Supply voltageV CC331321.234.52-7.5PCB2-1.5±0.15Surface:Dustproof filterConnector Reflective object13.510.18.5±0.152-R 3.75(Note 4)(1.3)Stamp2Y 0A H 01 F 27*7.45*9.4Light emitter slitLight receiving slit27Case(Note 5)Distance to reflective object2-Ø3.2 h ol e①③A Note 1 : * marked dimensions are the width between the body edge and the center of light emitting slit, and the width between the slit centers of light emitting and light receiving slits.Note 2 : Unspecified tolerance shall be ± 0.3 mm.Note 3 : Dimensions in parenthesis are shown for reference Note 4 : Do not touch the lead pins of connector at mounting.Note 5 : Dimension of may be larger than dimension of .Stamp (Example)Model nameProduction year : Last digit of prod. yearProduction month : Jan. to Sep. ; 1 to 9Oct. ; X, Nov. ; Y , Dec. ; Z 2Y0AH01 F27B ABConnector :J.S.T.TRADING COMPANY , LTD.S3B-PH(T a =25℃,V CC =5V)■Absolute Maximum RatingsSymbol Rating Unit Supply voltageV CC -0.3 to +7V Output terminal voltage V O -0.3 to V CC +0.3V Operating temperature T opr -10 to +60℃Storage temperatureT stg-40 to +70℃Parameter■Electro-optical CharacteristicsParameterSymbol Conditions MIN.TYP.MAX.Unit Average supply current I CC (Note 1)―2040mA Distance measuring ΔL (Note 1)4.5― 6.0mm Output voltageV O L=6.0mm (Note 1)0.350.50.65V VOutput voltage difference between L=4.5mm and L=6.0mm (Note 1)ΔV OOutput voltage differential1.451.702.0■Recommended operating conditions(T a =25℃,V CC =5V)* L : Distance to reflective objectNote 1 : Using reflective object : White paper (Made by Kodak Co., Ltd. gray cards R-27・white face, reflectance; 90%)ParameterSymbol Rating Unit Supply voltageV CC4.5 to5.5VFig. 1 Timing chartVcc(Power supply)nth outputnthmeasurementSecondmeasurementFirst measurementSecond outputFirst output Unstable output MAX 5.0ms38.3ms±9.6msDistance measuring operatingVo(Output)Fig. 2 Example of distance measuring characteristics (output)0.00.51.01.52.02.5Distance to reflective object (mm)O u t p u t v o l t a g e (V )White paper(Reflectance ratio 90%)4.54.64.74.84.95.05.15.25.35.45.55.65.75.85.96.0■Notes●Advice for the optics• The lens of this device needs to be kept clean. There are cases that dust, water or oil and so on deteriorate the characteristics of this device. Please consider in actual application.• Please don’t do washing. Washing may deteriorate the characteristics of optical system and so on.Please confirm resistance to chemicals under the actual usage since this product has not been designed against washing.●Advice for the characteristics• In case that an optical filter is set in front of the emitter and detector portion, the optical filter which has the most efficient transmittance at the emitting wavelength range of LED for this product (λ = 870 ± 70nm), shall berecommended to use. Both faces of the filter should be mirror polishing. Also, as there are cases that the characteristics may not be satisfied according to the distance between the protection cover and this product or the thickness of the protection cover, please use this product after confirming the operation sufficiently in actual application.• In case that there is an object near to emitter side of the sensor between sensor and a detecting object, please use this device after confirming sufficiently that the characteristics of this sensor do not change by the object.• When the detector is exposed to the direct light from the sun, tungsten lamp and so on, there are cases that it can not measure the distance exactly. Please consider the design that the detector is not exposed to the direct light from such light source.• Distance to a mirror reflector can not be sometimes measured exactly.In case of changing the mounting angle of this product, it may measure the distance exactly.• In case that reflective object has boundary line which material or color etc. are excessively different, in order todecrease deviation of measuring distance, it shall be recommended to set the sensor that the direction of boundary line and the line between emitter center and detector center are in parallel.• In order to decrease deviation of measuring distance by moving direction of the reflective object, it shall be recommended to set the sensor that the moving direction of the object and the line between emitter center and detector center are vertical.●Advice for the power supply • In order to stabilize power supply line, we recommend to insert a by-pass capacitor of 10μF or morebetween Vcc and GND near this product.(Incorrect)(Correct)(Incorrect)(Moving direction)(Correct)(Moving direction)●Notes on handling• There are some possibilities that the internal components in the sensor may be exposed to the excessive mechanical stress. Please be careful not to cause any excessive pressure on the sensor package and also on the PCB while assembling this product.●Cleaning InstructionsSolvent cleaning :Solvent temperature 45℃ or less, Immersion for 3 min or lessUltrasonic cleaning :The effect to device by ultrasonic cleaning differs by cleaning bath size, ultrasonic power output, cleaning time, PCB size or device mounting condition etc.Please test it in actual using condition and confirm that doesn't occur any defect before startingthe ultrasonic cleaning. The cleaning shall be carried out with solvent below.Recommended Solvent materials :Ethyl alcohol, Methyl alcohol, Isopropyl alcohol●Presence of ODC etc.✓✓✓Infrared datacommunication device*✓✓CategoryToxic and hazardous substancesLead (Pb)Mercury (Hg)Cadmium(Cd)Hexavalent chromium (Cr 6+)Polybrominated biphenyls (PBB)Polybrominateddiphenyl ethers(PBDE)This product shall not contain the following materials.And they are not used in the production process for this product.Regulation substances : CFCs, Halon, Carbon tetrachloride, 1.1.1-Trichloroethane (Methylchloroform)Specific brominated flame retardants such as the PBB and PBDE are not used in this product at all.• The RoHS directive (2002/95/EC)This product complies with the RoHS directive (2002/95/EC).Object substances: lead (except for lead in glass of electronic components), cadmium, hexavalent chromium, polybrominated biphenyls (PBB) and polybrominated diphenyl ethers (PBDE)• Content of six substances specified in “ Management Methods for Control of Pollution Caused by Electronic Information Products Regulation ” (Chinese : 电子信息产品污染控制管理办法)✓: indicates that the content of the toxic and hazardous substance in all the homogeneous materials of the partis below the concentration limit requirement as described in SJ/T 11363-2006 standard.* : indicates that the content of the toxic and hazardous substance in at least one homogeneous material of the part exceeds the concentration limit requirement as described in SJ/T 11363-2006 standard.Lead in glass of electronic components (designated by “*” in the above table) are exempt from the RoHS directive (2002/95/EC), because there is no effective way to eliminate or substitute them by present scientific technology.■Package specificationProductTrayProductTray section MAX. 100 pieces per tray■Important Notices· The circuit application examples in this publication are provided to explain representative applications of SHARP devices and are not intended to guarantee any circuit design or license any intellectual property rights. SHARP takes no responsibility for any problems related to any intellectual property right of a third party resulting from the use of SHARP's devices.· Contact SHARP in order to obtain the latest device specifi-cation sheets before using any SHARP device. SHARP reserves the right to make changes in the specifications, characteristics, data, materials, structure, and other contents described herein at any time without notice in order to improve design or reliability. Manufacturing locations are also subject to change without notice.· Observe the following points when using any devices in this publication. SHARP takes no responsibility for damage caused by improper use of the devices which does not meet the conditions and absolute maximum ratings to be used specified in the relevant specification sheet nor meet the following condi-tions:(i) The devices in this publication are designed for use in general electronic equipment designs such as:--- Personal computers--- Office automation equipment--- Telecommunication equipment [terminal]--- Test and measurement equipment--- Industrial control--- Audio visual equipment--- Consumer electronics(ii) Measures such as fail-safe function and redundant design should be taken to ensure reliability and safety when SHARP devices are used for or in connection with equipment that requires higher reliability such as:--- Transportation control and safety equipment (i.e.,aircraft, trains, automobiles, etc.)--- Traffic signals--- Gas leakage sensor breakers--- Alarm equipment--- Various safety devices, etc.(iii) SHARP devices shall not be used for or in connection with equipment that requires an extremely high level of reliability and safety such as:--- Space applications--- Telecommunication equipment [trunk lines]--- Nuclear power control equipment--- Medical and other life support equipment (e.g.,scuba).· If the SHARP devices listed in this publication fall within the scope of strategic products described in the Foreign Exchange and Foreign Trade Law of Japan, it is necessary to obtain approval to export such SHARP devices.· This publication is the proprietary product of SHARP and is copyrighted, with all rights reserved. Under the copy-right laws, no part of this publication may be repro-duced or transmitted in any form or by any means, electronic or mechanical, for any purpose, in whole or in part, without the express written permission of SHARP. Express written permission is also required before any use of this publication may be made by a third party.· Contact and consult with a SHARP representative if thereare any questions about the contents of this publication.Sheet No.: E4-A00401EN。
欧司朗 066048 红外感应器 180° 动作开关 表面接线说明书
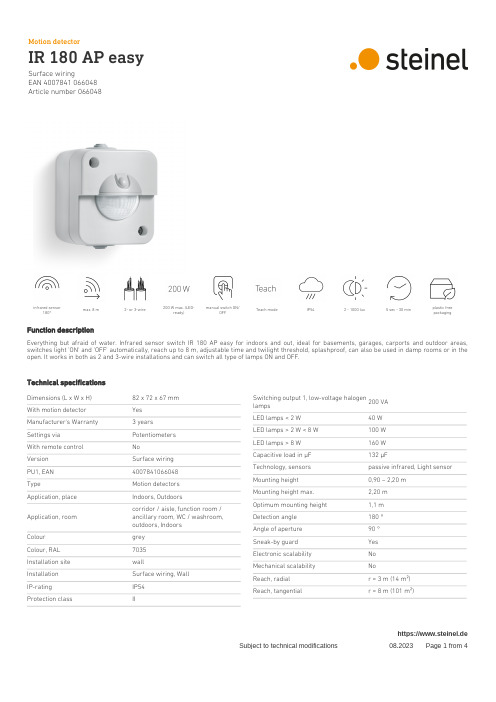
EAN 4007841 066048Article number 066048infrared sensor180°max. 8 m 2- or 3-wire200 W max. (LED-ready)manual switch ON/OFFTeach mode IP54 2 - 1000 lux 5 sec - 30 minplastic free packagingFunction descriptionEverything but afraid of water. Infrared sensor switch IR 180 AP easy for indoors and out, ideal for basements, garages, carports and outdoor areas, switches light 'ON' and 'OFF' automatically, reach up to 8 m, adjustable time and twilight threshold, splashproof, can also be used in damp rooms or in the open. It works in both as 2 and 3-wire installations and can switch all type of lamps ON and OFF.Technical specificationsDimensions (L x W x H)82 x 72 x 67 mm With motion detector Yes Manufacturer's Warranty 3 years Settings via Potentiometers With remote control NoVersion Surface wiring PU1, EAN 4007841066048TypeMotion detectors Application, place Indoors, OutdoorsApplication, room corridor / aisle, function room / ancillary room, WC / washroom, outdoors, Indoors Colour grey Colour, RAL 7035Installation site wallInstallation Surface wiring, Wall IP-rating IP54Protection classIISwitching output 1, low-voltage halogenlamps200 VALED lamps < 2 W 40 W LED lamps > 2 W < 8 W 100 W LED lamps > 8 W 160 W Capacitive load in μF 132 µFTechnology, sensors passive infrared, Light sensor Mounting height 0,90 – 2,20 m Mounting height max.2,20 m Optimum mounting height 1,1 m Detection angle 180 °Angle of aperture 90 °Sneak-by guard Yes Electronic scalability No Mechanical scalability NoReach, radial r = 3 m (14 m²)Reach, tangentialr = 8 m (101 m²)https://www.steinel.deEAN 4007841 066048Article number 066048Technical specificationsAmbient temperature0 – 40 °CMaterial PlasticMains power supply220 – 240 V / 50 – 60 Hz Switching output 1, resistive200 WSwitching output 1, number ofLEDs / fluorescent lamps4 pcs.Fluorescent lamps, electronic ballast150 WFluorescent lamps, uncorrected150 VAFluorescent lamps, series-corrected150 VAFluorescent lamps, parallel-corrected 150 VASwitching zones96 switching zonesTwilight setting 2 – 1000 lxTime setting 5 s – 30 Min.Basic light level function NoMain light adjustable NoTwilight setting TEACH YesConstant-lighting control NoInterconnection Yeshttps://www.steinel.deEAN 4007841 066048Article number 066048Detection Zone Dimension Drawing2-wire circuit diagram3-wire circuit diagramhttps://www.steinel.deEAN 4007841 066048Article number 066048Circuit diagram for interconnecting several sensorshttps://www.steinel.de。
基于NI myRIO的移动机器人电气控制研究与实现
32 | 电子制作 2021年03月台。
职业院校作为培养技能型人才主阵地,大力发展和弘扬职业教育是制造业转型升级的必经之路,移动机器人项目作为制造与工程技术领域的项目之一,推广移动机器人项目的技术应用,对培养具有工程思维的技能人才有着积极的意义。
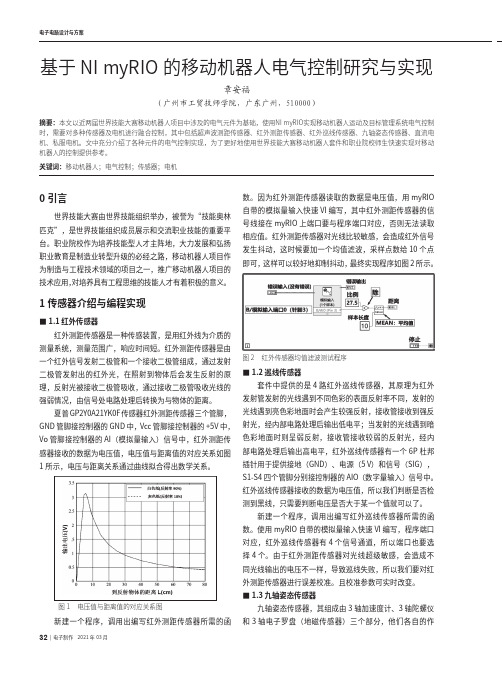
1 传感器介绍与编程实现■1.1 红外传感器红外测距传感器是一种传感装置,是用红外线为介质的测量系统,测量范围广,响应时间短。
红外测距传感器是由一个红外信号发射二极管和一个接收二极管组成,通过发射二极管发射出的红外光,在照射到物体后会发生反射的原理,反射光被接收二极管吸收,通过接收二极管吸收光线的强弱情况,由信号处电路处理后转换为与物体的距离。
夏普GP2Y0A21YK0F传感器红外测距传感器三个管脚,GND 管脚接控制器的GND 中,Vcc 管脚接控制器的+5V 中,Vo 管脚接控制器的AI(模拟量输入)信号中,红外测距传感器接收的数据为电压值,电压值与距离值的对应关系如图1所示,电压与距离关系通过曲线拟合得出数学关系。
图1 电压值与距离值的对应关系图新建一个程序,调用出编写红外测距传感器所需的函发生抖动,这时候要加一个均值滤波,采样点数给10个点即可,这样可以较好地抑制抖动,最终实现程序如图2所示。
图2 红外传感器均值滤波测试程序■1.2 巡线传感器套件中提供的是4路红外巡线传感器,其原理为红外发射管发射的光线遇到不同色彩的表面反射率不同,发射的光线遇到亮色彩地面时会产生较强反射,接收管接收到强反射光,经内部电路处理后输出低电平;当发射的光线遇到暗色彩地面时则呈弱反射,接收管接收较弱的反射光,经内部电路处理后输出高电平,红外巡线传感器有一个6P 杜邦插针用于提供接地(GND)、电源(5 V)和信号(SIG),S1-S4四个管脚分别接控制器的AIO(数字量输入)信号中。
红外巡线传感器接收的数据为电压值,所以我们判断是否检测到黑线,只需要判断电压是否大于某一个值就可以了。
基于CAN总线的汽车多功能监测仪

基于CAN总线的汽车多功能监测仪摘要:设计了一个基于CAN总线的汽车多功能监测系统,该系统为运行中的汽车提供了一个数据采集和显示的平台。
系统主要由传感器、CAN总线以及芯片MC9S12XS128组成,CAN总线将传感器采集的信息传递给芯片MC9S12XS128,同时又将芯片MC9S12XS128的处理结果传送给显示器。
驾驶员可以通过该系统看到汽车在行驶过程中的一系列数据,实验表明,基于CAN总线的汽车多功能检测仪性能卓越、可靠性高。
关键词:CAN总线;汽车测速;传感器;数据采集0 引言本系统通过多种传感器采集汽车在行驶中的各种数据,经过数据处理芯片MC9S12XS128处理后通过显示器显示给驾驶员。
系统中的数据通过CAN总线进行传输,这样就可以免除数据传输线冗长,既有节省车内空间又保证了数据的可靠性。
1 CAN总线简介在当前的汽车行业中,由于安全、舒适、方便、低公害、低成本的要求,出现了各种各样的电子控制系统,由于这些系统对通信所用的数据类型以及可靠性的要求有所不同,使得汽车中的电子控制系统由多条总线构成,为解决这一难题德国Bosch公司开发出的面向汽车的CAN 通信协议,这样不但可以减少线束的数量,而且可以通过多个LAN,进行大量数据的高速通信。
CAN 通过ISO11898 及ISO11519 进行了标准化,现在已经发展成为欧洲汽车网络的标准协议。
按照现场总线透明设计和柔性设计的要求来说,CAN总线分为了3个层次:CAN对象层、CAN传输层、CAN物理层[3]。
2 测速原理汽车测速的原理是公式v =r[]t。
假定轮圈的周长为L,在轮圈上安装m个永久磁铁,则测得的里程值最大误差为L/m。
经综合分析,本设计中取m=1。
当轮子每转一圈,通过开关型霍尔元件传感器采集到一个脉冲信号,并输入给处理器,传感器每获取一个脉冲信号即对系统提供一次计数中断。
每次中断代表车轮转动一圈,中断数n与轮圈的周长L的乘积为里程值。
基于STM32的红外测距系统设计
基于STM32的红外测距系统设计摘要随着现代科学技术的发展,出现了很多新的领域,为了实现对物体近距离、高精度的无线测量,本论文对红外测距领域进行了研究。
本论文采用单片机作为处理器,编写A/D转换程序及LCD显示程序,红外传感器作为工作模块,完成一套高精度显示、实时测量的红外测距系统。
本系统结构简单、体积小、测量精度高、成本低、方便使用。
本论文所介绍的是一种基于STM32单片机并运用日本夏普公司型号为GP2Y0A21的红外传感器所设计的红外测距系统。
首先,介绍红外线及红外传感器的分类及应用、STM32单片机的简介与功能;其次,阐述红外测距系统工作原理及基本结构并对单片机、红外传感器、LCD液晶显示屏的工作电路做了介绍;再次,对系统进行了整体设计构想,先后对系统硬件及软件进行设计,并对整个系统的功能进行了调试。
最后对整个设计进行总结,说明红外测距系统实现的可行性。
关键词红外测距;单片机;A/D转换;LCDSTM32-based infrared ranging system designAbstractWith the development of modern science and technology, there are many new areas, in order to achieve the object close range, high-precision wireless measurement,this topic of infrared ranging is studied. This topic using SCM as the processor, to write A/D converter and LCD display program, an infrared sensor as a working module, complete set of precision display, real-time measurement of infrared ranging system. This system has the advantages of simple structure, small size and high accuracy, low cost and convenient use. This paper introduced is based STM32 microcontroller and use of Japan's Sharp Corporation model GP2Y0A21 infrared sensor designed infrared ranging system. Firstly, introduce the classification and application of infrared distance measurement,it also introduces the function of STM32 microcontroller. Then illustrate the work theory and basic structure of it and introduce the LCD screen and work circuit. Again, the system has carried on the overall design idea, successively on the system hardware and software design, and probes into the function of the whole system debugging. Finally, summarize the entire design to illustrate the feasibility of infrared distance measurement.Keywords Infrared range, SCM, A/D converter, LCD目录摘要 (I)Abstract (II)第1章绪论 (4)1.1 课题研究背景及意义 (4)1.2 本论文主要研究内容 (4)第2章红外测距系统硬件设计 (6)2.1 红外测距系统的工作原理 (6)2.1.1 时间差法测距原理 (6)2.1.2 反射能量法测距原理 (6)2.1.3 相位法测距原理 (6)2.1.4三角法测距原理 (7)2.2 红外测距系统的基本结构 (7)2.2.1 红外传感器模块 (8)2.2.2 单片机处理模块 (9)2.2.3 LCD显示模块 (16)2.3 本章小结 (17)第3章红外测距系统的软件设计及功能调试 (18)3.1 红外测距系统工作流程 (18)3.2 软件程序设计 (19)3.3 硬件功能调试 (19)3.4 软件功能调试 (20)3.5 测量数据绘图 (20)3.6 本章小结 (23)结论 (25)致谢 (26)参考文献 (27)附录A (29)附录B (35)附录C (38)第1章 绪论1.1 课题研究背景及意义随着科学技术的不断发展,在测距领域也先后出现了激光测距、微波雷达测距、超声波测距及红外线测距等方式。
HY17M28红外线传感器应用说明书

HY17M28红外线传感器应用说明书Infrared Thermopile Measurement Application Note.Table of Contents1.简介 (4)2.原理说明 (5)2.1.红外线波长介绍 (5)2.2.物体辐射 (5)2.3.量测光点与窗口 (8)2.4.传感器简介 (8)2.5.控制芯片 (10)3.设计规划 (13)3.1.硬件电路 (13)3.2.电路说明 (14).3.3.软件说明 (17)3.4.HY17M28红外测温演示板介绍 (23)4.技术规格 (27)5.演示板相关档案 (29)6.参考文献 (30)7.修订记录 (31).1. 简介常见的红外线传感器应用可分为医疗、工业、消费性用途,如耳温枪、额温枪、工业用温度仪、红外线温度计…等。
在耳温枪应用中,需注意红外线传感器进入耳中的升温效应、导波管与传感器的连接方式…等。
在红外线温度计应用中,需注意待测物距离、透镜的聚焦距离…等,本文仅说明如何使用纮康科技HY17M28芯片,以量测传感器转成的电信号,尤其需要注意范例程序demo code仅供应用时设计参考,不能直接作为实际生产用程序。
.2. 原理说明2.1. 红外线波长介绍图1波长频谱图,红外线常用的量测波长范围:700nm~14000nm依红外线的波长范围和红外线辐射源可区分 近红外线(Near Infra-red, NIR);700~2,000nm 中红外线(Middle Infra-red, MIR);3,000~5,000nm 远红外线(Far Infra-red, FIR);8,000~14,000nm2.2. 物体辐射图 2 物体辐射与传感器接受辐射的关系.传感器除了侦测到物体本身的辐射外,还会侦测到反射的辐射和让辐射穿透,彼此间的辐射关系可用A+R+T=1表示。
2.2.1黑体与非黑体散射以公式而言,固体T=0R 1E R 1A 1R A -=⇒-=⇒=+ 黑体:R=0非黑体:R≠0,R=0.1或0.2…图 3 黑体与灰体的波长与散射关系2.2.2金属图 4 金属吸收波长在不同温度下的量测误差.由于金属物质常反射,所以不容易散射,以特定的波长、温度量测金属物质,会造成金属物质的高散射可能性,因此以特定波长、温度会提高对金属物质的量测准确性,金属的散射与波长、温度具有相当密切的关系。
智慧城市之智慧井盖网络
ACADEMIC AND DISCUSSION1引言随着城市各项功能日益完善,井盖的被盗、缺失损坏现象频频发生,井盖被盗成为全国各地城市住宅小区比较普遍的社会现象。
住宅小区的安全更是关乎民生安全,小区井盖的丢失更是严重影响到居民的日常生活以及安全,由此引发的伤亡惨剧时时见诣报端,造成无法挽回的后果,令人痛惜。
为保证民众安全,许多国家在井盖设计上大动脑筋,并借力智能监控手段进行日常管理。
美国为提高井盖的安全系数,纽约市环保局2012年宣布在市内数十个下水道井盖下方安装电子监视器。
德国为了达到井盖的安全,设计了精密的防护网。
日本则是从直观上提醒民众井盖的安全问题[1]。
到目前为止,国内能有效的监测井盖的系统少之又少,美国在井盖下安装电子监视器虽能解决问题,但投资太大,推广起来相对比较困难。
在这种情况下,智能网络井盖监测系统也就应运而生,并且成为国内研究的热点。
因此开发一套高效率、低投入、实时性强的井盖监测与报警系统势在必行。
2系统功能本系统主要采用的ZigBee无线传输技术和SHARP的2Y0A21红外测距传感器实时监控和采集数据。
当井盖被盗或发生异常时,红外测距传感器监测出异常,通过ZigBee将异常信息无线送给PC,PC端可以直观的显示出异常井盖的准确位置。
避免了有线传输中布线的繁琐与后期维护的麻烦。
系统具有井盖状态实时性监测,当井盖被盗或发生异常时,红外测距传感器及时监测出异常并将信息反馈给ZigBee。
ZigBee检测到异常信号时,利用其自组网、可靠性高、低功耗的特点,将异常信号无线传输给终端,避免了有线传输中布线的繁琐和后期维护的麻烦。
上位机接收到ZigBee信号后,即可可以精确的显示出具体井盖发生异常的地理位置,同时上位机收到井盖异常信号便可以通过上位机的短信按钮发送信息给维修人员,达到了及时维修的效果,实现无人监测的目的,将井盖丢失带来的不安全隐患彻底消除。
3设计原理系统采用夏普GP2Y0A21型距离测量传感器,该传感器是基于PSD的微距传感器,其有效测距在80cm以内,有效的测量角度大于40度,输出的信号为模拟电压,在0到8cm左右的范围内与距离成正比非线性的关系,在10到80cm的距离范围内成反比非线性关系,平均功耗约为30mA,反应时间约为5ms,并且对背景光及温度的适应性强。
红外传感器-sharp

SHARP(GP2D12)红外距离传感器SHARP红外距离传感器,用于模型或机器人制作,可以用来测量距离。
如图:一、技术参数:探测距离:10-80cm工作电压:4-5.5V标准电流消耗:33-50 mA输出量:模拟量输出,输出电压和探测距离成比例二、工作原理Sharp的红外传感器都是基于一个原理,三角测量原理。
红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图:三角测量原理反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D 就可以通过几何关系计算出来了。
可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。
当物体距离D很大时,L值就会很小。
这时CCD 检测器能否分辨得出这个很小的L值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值。
要检测越是远的物体,CCD的分辨率要求就越高。
三、工作特性其引脚接口如图说明:Sharp GS2XX系列的传感器的输出是非线性的。
每个型号的输出曲线都不同。
所以,在实际使用前,最好能对所使用的传感器进行一下校正。
对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。
下图是典型的Sharp GP2D12的输出曲线图。
由上图可知:我们在测量距离为20-80cm时,还是比较准确的。
当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。
这样就会出现问题了,但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。
当然了,这里有个小技巧。
只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。
ATN IR850 Supernova 长距离红外侦查设备说明书
u s e r ’s g u i d eImportant Export Restrictions! Commodities, products, tech-nologies and services contained in this manual are subject to one or more of the export control laws and regulations of the US BIS-Department of Commerce, Export Administration Regula-tions. It is unlawful and strictly prohibited to export, or attempt to export or otherwise transfer or sell any hardware or technical data or furnish any service to any foreign person, whether abroad or in the United States, for which a license or written approval of the U.S. Government is required, without first obtaining the required license or written approval from the Department of the U.S. Government having jurisdiction. Diversion contrary to U.S. law is prohibited.LONG RANGE INFRA-RED ILLUMINATORUSER’S GUIDE (IR850 SUPERNOVA) REVISION 1 – FEBRUARY, 2018ATN IR850 SupernovaTo adjust the windage and ele-vation, the two round dials must be turned/adjusted.The round dial on the left is your elevation adjustment. The fl at dial is your windage adjust-ment.Adjust each dial until your I R light is centered with your pic-ture.To prevent wear and retain water-resistance it is a good idea to lubricatethe threads and o-rings if they become dry.Unscrew the switch cover retaining ring use a forceps (or round nose pli-ers). Then replace the switch cover and replace the retaining ring.Light Doesn’t Turn OnBattery tube does not tightened against the Neck or the tail-cap does not tightened.Light Dimming1. Battery may be faulty. Try another fully charged battery.2. Battery may need charging. Charge your battery, and retry.Elevation adjustmentdialAdjustable MountWindage adjustment dial For customer service and technical support, please contact American Technologies Network Corp.1341 San Mateo Avenue, South San Francisco, CA 94080phone: 800-910-2862, 650-989-5100e-mail:*******************©2018 ATN CorporationCongratulations on choosing the ATN IR850 Supernova; an extremely power-ful, long range infra-red illuminator that is perfect for hunting, law enforcement, search and rescue, and military use.Before using your IR850 Supernova, please read this manual carefully. Also, refer to the troubleshooting tips for any issues/problems.Windage adjustmentdialBrightness control ring Adjustable MountElevation adjustmentdialNeckBattery tubeT ail capGrip ringHeadBezel• Constructed from aircraft grade aluminium.• Surface: hard anodized fi nish, highly durable.• LED: Using high power emitter with a long lifetime.• Waterproof to IPX8 standard.• Four modes of operation.• Flawless white beam.• Uses single lithium 18650 battery.• Removable grip ring.• Easy rail mounting system.• Accessories: battery charger.• One-year Warranty.Remove the tailcap, insert a 18650 battery, positive of the battery towards the head.NOTE: Please hold the battery tube (not the brightness control ring or neck) when tightening/loosing the tail-cap.The IR850 Supernova is available use single 18650.1. Unscrew the Tail cap from the Battery Tube, until it is free.2. Place Battery within the Battery Tube, observing proper battery polarity.3. Screw the Tail cap to the right.NOTE: Do not use two or more rechargeable lithium batteries in series.Tail capBattery tubeBattery (18650)The IR850 Supernova has 4 stage output-Low at 5%-30%-70%-100%.These modes can be accessed by turning the brightness control ring.Low output setting Medium output setting High output settingTurn the light to maximum out-put and shine it on a wall 8~10 m away. To focus the beam, hold the lens head in one hand and turn the battery tube with your other hand. Turn clockwise or counter-clock-wise till the focus is to your liking.Attach the I adjust the mount as follows:1. Unscrew the four screws [1] securing the top of the bracket [2] and the bottom [3] half of the ad-justable mount.2. Place the top and lower parts of the adjustable mount around the IR850 Supernova.3. Using an Allen wrench, se-cure the four screws [1]. Do not apply excessive torque.123。
GP2A200LCS0F,全新进口原装,专业代理,短程红外测距传感器

GP2A200LCS0F,全新进⼝原装,专业代理,短程红外测距传感器2-22mm红外测距传感器,⽇本夏普专业代理,全新进⼝原装,常年备货,专业代理您还为机器⼈制造、门禁系统开发、各种测距需要⽽找不到相关元器件发愁吗?别愁,北京冠宇铭通科技有限责任公司,长期专业销售夏普、飞思卡尔传感器!成就您机器⼈制造、门禁系统开发、检测距离的梦想!不同测距元器件公司现货,价格优,质量保障,欲购从速!GP2Y0D340K 测距 40cmGP2Y0D21YK0F测距 24cmGP2Y0A21YK0F 测距10 ~ 80cmGP2Y0A02YK0F 测距20 ~ 150cmGP2Y3A003K0F 测距40 ~ 300cmGP2Y3A002K0F 测距20 ~ 150cmGP2Y3A001K0F测距 4 ~ 30cmGP2Y0D805Z0F测距5cmGP2Y0D310K测距10cmGP2D12J0000F测距 10 ~ 80cmGP2Y0D810Z0F测距10cmGP2Y0D02YK 测距80cmGP2D120 测距4-30cmGP2Y0D413K0F 测距13cm 数字输出GP2Y0A710K0F测距100-550cmGP2Y0A700K0F 测距100-550cmGP2A200LCS0F 测距0.079" ~ 0.866" (2mm ~ 22mm)ADJGP2A200LCS0F 2-22mmGP2A25J0000F 测距1MM-9MMGP3Y0D012 测距4-150cmGP2Y1010AU0F 0.5V/(0.1mg/m3)GP2Y0D340K 40cmGP2D150AJ00F 15cm测距联系⼈:徐先⽣⼿机:151********电话:010-********QQ:183183890。
GP12D夏普红外线传感器

Arduino&GP2D12红外线测距传感器[ 2008/6/14 19:50:00 | By: wxxmickey ]3推荐最近忙生活琐事,很少搞这些小东东,今天闲了一下就发表一个Arduino控制GP2D12的小实例,仅供大家参考!器材:Arduino开发板,GP2D12,1602字符液晶,连接线若干。
Arduino开发板和1602字符液晶我就不多介绍了,前面都提到过。
GP2D12是日本SHARP公司生产的红外距离传感器,价格便宜,测距效果还不错,主要用于模型或机器人制作。
技术规格如下:探测距离:10-80cm工作电压:4-5.5V标准电流消耗:33-50 mA输出量:模拟量输出,输出电压和探测距离成比例从曲线图中我们可以看出,输出电压并非是线性的,所以这个测距也就只能测个大概,如果要精度高的话就需要做非线性校正,这里我们就不讨论这个问题了。
实验原理:GP2D12根据距离的远近输出相应的电压,经Arduino开发板0号模拟口输入,转换成数字量,根据公式计算得到需要显示的数据。
实验原理图:实验实物图:没有障碍物,显示范围超出。
有障碍物时显示测量距离。
经实验,需要在GP2D12的电源端加个10UF以上的电解电容,稳定供电电压,以保证输出模拟电压更稳定。
实验代码:/********************************************************************/int GP2D12=0;int ledpin = 13;int LCD1602_RS=12;int LCD1602_RW=11;int LCD1602_EN=10;int DB[] = {6, 7, 8, 9};char str1[]="";char str2[]="Renge:00cm";char str3[]="Renge Over";/********************************************************************//********************************************************************/void LCD_Command_Write(int command){int i,temp;digitalWrite( LCD1602_RS,LOW);digitalWrite( LCD1602_RW,LOW);digitalWrite( LCD1602_EN,LOW);temp=command & 0xf0;for (i=DB[0]; i <= 9; i++){digitalWrite(i,temp & 0x80);temp <<= 1;}digitalWrite( LCD1602_EN,HIGH);delayMicroseconds(1);digitalWrite( LCD1602_EN,LOW);temp=(command & 0x0f)<<4;for (i=DB[0]; i <= 10; i++){digitalWrite(i,temp & 0x80);temp <<= 1;}digitalWrite( LCD1602_EN,HIGH);delayMicroseconds(1);digitalWrite( LCD1602_EN,LOW);}/********************************************************************/ void LCD_Data_Write(int dat){int i=0,temp;digitalWrite( LCD1602_RS,HIGH);digitalWrite( LCD1602_RW,LOW);digitalWrite( LCD1602_EN,LOW);temp=dat & 0xf0;for (i=DB[0]; i <= 9; i++){digitalWrite(i,temp & 0x80);temp <<= 1;}digitalWrite( LCD1602_EN,HIGH);delayMicroseconds(1);digitalWrite( LCD1602_EN,LOW);temp=(dat & 0x0f)<<4;for (i=DB[0]; i <= 10; i++){digitalWrite(i,temp & 0x80);temp <<= 1;}digitalWrite( LCD1602_EN,HIGH);delayMicroseconds(1);digitalWrite( LCD1602_EN,LOW);}/********************************************************************/ void LCD_SET_XY( int x, int y ){int address;if (y ==0) address = 0x80 + x;else address = 0xC0 + x;LCD_Command_Write(address);}/********************************************************************/ void LCD_Write_Char( int x,int y,int dat){LCD_SET_XY( x, y );LCD_Data_Write(dat);}/********************************************************************/ void LCD_Write_String(int x,int y,char *s){LCD_SET_XY( x, y ); //设置地址while (*s) //写字符串{LCD_Data_Write(*s);s ++;}}/********************************************************************/ void setup (void){int i = 0;for (i=6; i <= 13; i++){pinMode(i,OUTPUT);}LCD_Command_Write(0x28);//4线2行2x7delay(50);LCD_Command_Write(0x06);delay(50);LCD_Command_Write(0x0c);delay(50);LCD_Command_Write(0x80);delay(50);LCD_Command_Write(0x01);}/********************************************************************/ void loop (void){int tmp;cahr val;char i,a,b;LCD_Command_Write(0x02);delay(50);LCD_Write_String(1,0,str1);delay(50);LCD_Write_String(3,1,str2);delay(50);while(1){tmp = analogRead(GP2D12);if (tmp < 3)return -1;val=(6787.0 /((float)tmp - 3.0)) - 4.0;if(val>80||val<10){LCD_Write_String(3,1,str3);}else{LCD_Write_String(3,1,str2);a=0x30+val/10;b=0x30+val%10;LCD_Write_Char(9,1,a);LCD_Write_Char(10,1,b);}delay(500);}}。
基于GP2D12红外测距模块防盗系统设计PROTUES仿真

指导代做仿真设计程序编写调试修改程序GP2D12是一款Sharp公司生产的红外线测距传感器,广泛应用在各个领域,在机器人制作过程中,我们也时常用它来进行机器人与障碍物之间的距离测量,行进速度等。
GP2D12产品规格参数:1.测量射程范围:10 to 80 cm2.最大允许角度:>40°3.电源电压:4.5 to5.5V4.平均功耗:35mA5.峰值功耗:约200mA6.更新频率/周期:25Hz/40ms7.模拟输出噪声:<200mV8.测量距离与输出模拟电压关系:2.4V~0.4V模拟信号对应10cm~80cm,输出与距离成反比非线性关系。
GP2D12使用性能个人点评:优点:1. 红外传感器连接使用简单,对于1米以内的中距离测试精度良好、性能优越。
2. 数据测量值稳定,测量结果波动较小。
3. 数据传输稳定,程序读取简单不会在数据传输过程中出现卡死的现象,错误信号较少。
缺陷:1. GP2d12测量范围有限,最大值80cm,并且从60cm开外的距离开始测量值的波动较大,与实际情况偏差增大。
(60cm为室内环境的个人感受,不同环境所产生的干扰不同所以可能达到的精度也有所不同。
)2. 当障碍物(或目标)与红外传感器之间的距离小于10cm时,测量值将与实际值出现明显偏差,当距离值从10降至0的过程中,测量值将在10~35之间递增。
(电压值与距离值关系:如图)3. 红外传感器,使用时会受到环境光的影响,在室内使用时,传感器数据接收时可能会受到白炽灯光线的印象,产生一些非真的距离值。
GP2D12使用注意及使用优化方式:1. 当多个GP2d12同时连接Arduino板使用时,由于供电量的增加,可能造成电压不稳定而对测量结果产生偏差。
从硬件角度可以通过在VCC与GND之间接电容的方式来稳定对GP2d12的供电,减少供电电压波动对测量结果的影响,或者在GND与数据线之间接一个电容减小输出电压的波动略去可能出现的误差信号,提高数据稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
红外测距传感器:Sharp红外传感器的原理以及使用技巧
2009-02-23 21:20
在过去几年中,Sharp开发了很多种红外距离传感器。
这些传感器不但体积小,功耗也很低。
这篇文章就简单的介绍一下这些传感器的不同点,使用方法,接口方法以及一些使用上的小技巧。
工作原理:
Sharp的红外传感器都是基于一个原理,三角测量原理。
红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。
反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。
图1:三角测量原理
可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。
当物体距离D很大时,L值就会很小。
这时CCD检测器能否分辨得出这个很小的L值成为关键,也就是说CCD 的分辨率决定能不能获得足够精确的L值。
要检测越是远的物体,CCD的分辨率要求就越高。
非线性输出:
Sharp GS2XX系列的传感器的输出是非线性的。
没个型号的输出曲线都不同。
所以,在实际使用前,最好能对所使用的传感器进行一下校正。
对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。
下图是典型的Sharp GP2D12的输出曲线图。
图2:Sharp GP2D12输出曲线
从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。
但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍
物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。
当然了,解决这个方法也不是没有,这里有个小技巧。
只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。
如图3所示:
图3:可以避免探测误差的安装图示
型号对比:
目前Sharp的红外线传感器有如下几种类型:
GP2D02 (串口输出)探测范围 10cm-80cm
GP2D05 (数字输出)探测范围固定的24cm
GP2D12 (模拟输出)探测范围 10cm-80cm
GP2D15 (数字输出)探测范围 24cm
GP2D120 (模拟输出)探测范围 4cm-30cm
GP2YOAO2YK (模拟输出)探测范围 20cm-150cm
GP2Y0D02YK (数字输出)探测范围 80cm
所有的模拟输出,其输出电压和距离成反比,数字输出只能检测在范围内物体是存在还是不存在,而不能提供距离的检测。