基于DSP的神经自适应模糊控制器的应用
基于DSP的自适应神经元网络控制系统的研究

该控 制 算 法经 由现 场 采样 和 实验 的仿 真 测 试 , 证 实 了其 有 效 性 。
关键词 : 自适应 , 神 经元 网络 , 最 速 下 降 法
Ab s t r a c t
Hy dr au l i c s y s t e m o f l ar ge equ i pmen t mu s t b e s u ppo r t e d b y oi pr l e s s ur e whi ch s h ou l d b e m a i n t ai n e d a t a s t a bl e v al u e I n t hi s p ape r , a n e ur o na l n et wor k c on t r o l s y s t em b as e d on DSP i s de s i gne d t o c on t r ol t h e f r equ e nc y o f t h e pu mp mot or t o
t h e k e y t o t he c on t r o l s y s t e m. Th e s i mu l at i o n t e s t c on f i r med t h e v al i di t y o f t h i s me t h od. K ey wor ds : a dap t i v e c on t r ol , n eu r a l n e t wor k c on t r o l , s t ee pe s t d es c en t me t ho d
自适应神经模糊系统及其应用研究

自适应神经模糊系统及其应用研究人工智能技术的发展,为科学家们开辟了一片全新的研究领域。
神经网络、模糊控制等技术的不断发展带来了自适应神经模糊系统的出现。
自适应神经模糊系统,又称为ANFIS(Adaptive Neuro Fuzzy Inference System),是一种基于神经网络与模糊逻辑综合的自适应智能系统。
本文将从它的概念、结构及应用等几个方面进行探讨。
一、概念自适应神经模糊系统是一种结合神经网络和模糊控制的新型智能系统。
它能够利用神经网络来自动完成输入与输出间的映射,同时利用模糊控制来实现自适应和推理功能,从而实现对系统的智能化控制。
ANFIS的核心部分是模糊推理机,它通过“如果……那么”的形式进行推理,将输入的模糊信号通过规则的运算,转化为输出信号。
在推理的过程中,ANFIS通过神经网络进行学习,并根据学习的结果来优化推理机的结构和参数,从而提高其推理的精度与效率。
二、结构ANFIS的结构是由输入层、隐含层、输出层和反向传播算法组成。
其中,输入层是将系统的输入变量进行接受和处理的部分;隐含层是神经网络部分,它利用了Takagi-Sugeno-Kang(TSK)模型作为模糊推理的核心,并通过反向传播算法对其进行训练;输出层则是将隐含层的结果进行处理并转化为系统输出的部分。
此外,ANFIS还包括规则库、模糊化和去模糊化等部分,用来处理系统中的模糊数据,使系统具有推理、记忆和自适应等能力。
三、应用自适应神经模糊系统在工业控制、模式识别、信号处理等多个领域拥有广泛的应用。
其中,应用最为广泛的是控制领域。
ANFIS通过有效的模糊推理机制和自适应能力,可以实现对复杂系统的精准控制。
例如,在工业生产过程中,ANFIS可以通过学习数据的变化趋势,自动调节系统中各部分的运行状态,达到节省能源、提高产量等效果。
在车辆控制方面,ANFIS可以通过对车辆行驶数据分析,对车辆的驾驶状态进行自适应控制,从而达到提高驾驶安全性和车辆性能的效果。
基于DSP的模糊自适应PID控制SRD设计及实现
文章 编 号 :1 0 4 1 ( 0 8 0 0 6 0 0 1- 2 7 2 0 )4— 0 0— 6
基于 D P的模糊 自适应 PD控制 S D S I R 设计及 实现
吴 江潦 , 易灵 芝 ,彭寒梅 ,钟 坤 炎
( 湘潭 大 学 信 息 工程 学 院 ,湖 南
湘潭 4 10 ) 1 15
关键 词 :S D;D P 自适 应 PD;模 糊 控 制 R S; I
中 图分 类 号 :T 5 M 32 文献 标 识 码 :A
0 引 言
作 为新一 代 交流 无 级调 速 系统 ,开关 磁 阻 电机 调速 系统 ( R 具有 结 构 简单 、启 S D) 动性 能好 和调 速范 围宽 等优点 ,被 广 泛应用 于电动 车驱动 系统 、家用 电器 ( 衣机和食 洗
对值 和偏差变化率绝对值 l l e ,输出语言变量为( ) K ,K, .输入 、输 出变量的
模 糊子 集 均为 4档 ,即{ ,小 ,中 ,大 ) 零 ,令 Z=零 ,S=小 ,M =中 ,B=大 .其论 域 均 为 {,l ,3 ,5 l 0 ,2 ,4 ,6 ,可 以取 语 言 变 量 值 4档 如下 :零 ( ) — 取 在 0附近 , z—
品加工 机 械等 ) 、通 用工业 ( 风机 、泵 和压缩 机等 ) 、伺服 与调速 系统 、牵 引 电机和 高转 速 电机 ( 织机 、航 空 发 动机 、电动 工具 和离 心机 传 动等 ) 纺 等工程 控 制领 域【 但 是 , 卜. 由于开关 磁 阻 电动机 (R 具 有 严重 的非线 性 、变 结构 和变 参数 特 点 ,难 以为其 建 立 S M) 精确 的数学模 型.如果 采用 传统 的 固定参 数 PD控 制 ,则控 制性 能较 差.本 文 采用 的 I
一种基于DSP和CPLD的通用型模糊控制器的设计和应用_图文(精)
船电技术 2005年第1期 47一种基于DSP 和CPLD 的通用型模糊控制器的设计和应用万华庆潘艳(中国船舶重工集团七一九研究所,武汉 430064摘要:介绍了以TI 公司的DSP 芯片TMS320C32为核心处理器,Actel 公司的CPLD 芯片A54SX32/08为协处理器的通用型模糊控制器。
介绍了控制器硬件原理电路,以及采用C 语言、汇编语言、VHDL 和FuzzyTECH 工具设计控制程序的方法。
关键词:模糊控制器,DSP ,CPLD ,VHDL ,FuzzyTECHDesign of a Universal Fuzzy Controller Based on DSP and CPLDWan Huaqing, Pan Yan(719 Institute of CSIC,Wuhan 430064, ChinaAbstract : This paper introduces an universal fuzzy controller with DSPTMS320C32 as its central processor and CPLD A54SX32/08 as its coprocessor. It presents the controller’s schematic diagram and the design method of control program utilizing C language, assemble language,VHDL and FuzzyTECH tools . Key words: DSP; CPLD; VHDL; FuzzyTECH; Fuzzy controller1 引言DSP (数字信号处理)芯片,是一种特别适合于数字信号运算的微处理器,以DSP 为基础实施模糊控制方案,具有较高的性能价格比,在性能上已达到复杂的专用模糊逻辑控制器的水平,利用DSP 的高速运算能力,可以同时完成数据采集和对模糊信息进行分析的功能。
自适应模糊控制系统在机械运动中的应用分析

自适应模糊控制系统在机械运动中的应用分析随着科技的不断发展,自适应模糊控制系统在机械运动中的应用愈发广泛。
它通过模糊控制算法和智能学习技术的结合,能够根据环境和系统的变化实时调整控制参数,从而实现更加精确和高效的机械运动控制。
在机械运动控制中,自适应模糊控制系统能够实时感知环境的变化,并根据实际需要进行调整,以达到最优的控制效果。
具体而言,它通过采集传感器数据,将数据进行处理和分析,并将结果反馈给控制系统,以实现对机械的准确控制。
自适应模糊控制系统的一个重要应用方向是机器人的运动控制。
在机器人领域,机械运动控制是至关重要的一环。
传统的运动控制方法往往对于系统模型的准确性要求较高,而这在实际应用中很难满足。
然而,自适应模糊控制系统能够通过模糊推理和自适应学习,对机器人的运动进行灵活调整,在未知环境中也能保持较好的控制效果。
除了机器人领域,自适应模糊控制系统在机械加工、运输等领域也有广泛应用。
例如,在机械加工过程中,控制系统需要根据工件的形状和材料特性来调整切削参数。
传统的控制方法需要提前建立复杂的数学模型,而自适应模糊控制系统则能够通过实时采集切削力和工艺参数等数据,结合模糊控制算法进行实时调整,从而更好地适应不同的加工情况。
此外,在物流运输领域,自适应模糊控制系统也可以帮助提高货物运输的效率和安全性。
例如,通过采集货车的负重、车速等数据,系统可以根据当前的道路条件和交通情况实时调整车辆的行驶模式和速度,以达到最佳的运输效果。
然而,自适应模糊控制系统在应用过程中也存在一些挑战和问题。
首先,控制算法的设计和调试需要耗费大量的时间和人力资源。
其次,控制系统所依赖的传感器和执行器的质量和性能对控制效果有着重要影响。
最后,对于复杂系统和大规模系统,控制系统的设计和优化也相对困难。
综上所述,自适应模糊控制系统在机械运动中的应用有着广泛的前景和潜力。
通过结合模糊控制算法和智能学习技术,自适应模糊控制系统能够适应环境和系统的变化,在机器人、机械加工和物流运输等领域发挥重要作用。
自适应模糊控制在机器人中的应用

自适应模糊控制在机器人中的应用在当今科技飞速发展的时代,机器人技术的进步日新月异,其在工业生产、医疗保健、家庭服务等众多领域发挥着日益重要的作用。
而自适应模糊控制作为一种先进的控制策略,为机器人的高效运行和精准操作提供了有力的支持。
要理解自适应模糊控制在机器人中的应用,首先得明白什么是自适应模糊控制。
简单来说,模糊控制是一种基于模糊逻辑的控制方法,它不像传统控制方法那样依赖精确的数学模型,而是通过使用模糊语言变量和模糊规则来描述系统的行为。
而自适应模糊控制则是在模糊控制的基础上,能够根据系统的运行情况和环境变化,自动调整控制参数和模糊规则,以实现更优的控制效果。
在机器人的运动控制中,自适应模糊控制表现出了显著的优势。
以机器人的行走为例,机器人在不同的地形上行走时,地面的摩擦力、坡度等因素都会对其运动产生影响。
传统的控制方法可能难以应对这种复杂多变的情况,而自适应模糊控制可以根据实时检测到的地形信息,自动调整机器人的步态和驱动力,使其能够稳定、高效地行走。
比如,当机器人遇到松软的沙地时,自适应模糊控制器会增加驱动力的输出,以防止机器人陷入;当遇到陡峭的斜坡时,会调整腿部的运动幅度和频率,以保持平衡。
在机器人的操作控制方面,自适应模糊控制也大有用武之地。
比如在工业机器人的装配作业中,机器人需要准确地抓取和放置各种零部件。
由于零部件的形状、尺寸和重量可能存在差异,传统的控制方法往往需要针对每种情况进行精确的建模和参数调整,这不仅费时费力,而且难以适应实际生产中的变化。
而自适应模糊控制可以通过对抓取过程中的力、位置等信息进行模糊化处理,自动生成合适的控制策略,从而提高装配的效率和精度。
此外,自适应模糊控制在机器人的视觉跟踪和导航中也发挥着重要作用。
在视觉跟踪中,机器人需要根据目标物体的图像特征实时调整自身的姿态和运动方向。
由于图像信息往往存在噪声和不确定性,传统的控制方法可能会导致跟踪误差较大。
而自适应模糊控制可以利用模糊逻辑对图像特征进行处理,从而更鲁棒地实现对目标的跟踪。
自适应模糊PID控制在压射控制系统中的应用
get hn e, f c es blyo s m, et d in l I er o t l h nc n ol bet h n e,h ra c ag sa et t t i f yt i t a io a PD l a nr e ot l dojc ca gd te sh a i t s e n h r t n i c ow r e
由电液 比例 阀控 制其开 口的大小。 由此我们 可以知道 ,
通过控 制 电磁 阀的开度 ,我们就可 以控制蓄 能器 注入 压射室 的油量及 油压, 从而达 到控 制压射 比压 的 目的。
1 自适应模 糊PD控制器的结构 I
压铸机实 时控制系统 中 自适应模糊.I PD控制器选
21 0 2年 第 2 卷 第 3期 1
h p/ w cS .r. t :ww . - ogc t / a a
计 算 机 系 统 应 用
ቤተ መጻሕፍቲ ባይዱ
自适应模糊 PD控制在压射控制系统中的应用① I
宋 立业 ,彭继慎 ,程 英 ,李志福
’ ( 辽宁工程技术大学 电气 与控 制工程学院,葫芦 岛 15 0 ) 2 15
s lt n r s l a e a e a a t ef z y P D o t l t o e s l . i a i u t wec n s et t h d p i z I c n o h di f a i e mu o e s h t v u r me s b
一
个 电液 比例 阀的位移量与实 际的位移量 做比较得到
的误差信 号作为输入信号 。采取适 当的控 制策略输 出 42 mA 的标准 电流信号控制 电液 比例 阀的开度 , -0 使蓄
能器在压 铸过程 中保持恒定不变 的压 力值 ,也使得压
基于神经网络的自适应模糊控制技术研究

基于神经网络的自适应模糊控制技术研究随着信息技术的飞速发展,神经网络技术在控制领域中应用得越来越广泛。
其中,基于神经网络的自适应模糊控制技术,作为一个新兴的控制方法,具有很高的研究和应用价值。
一、自适应模糊控制技术的意义自适应模糊控制技术是一种新型的控制方法,它融合了模糊控制和神经网络控制的优点,通过自适应地调节控制器的参数来实现对被控对象的精确控制。
与传统控制方法相比,自适应模糊控制技术具有以下优点:1. 适应性强:自适应模糊控制技术可以通过学习和训练来对被控对象进行预测和控制,因此具有非常强的适应性。
2. 控制精度高:自适应模糊控制技术可以根据被控对象的实时状态进行自适应调节,从而实现更高的控制精度。
3. 可扩展性好:自适应模糊控制技术可以通过增加神经网络的层数和节点数来扩展其应用范围,因此在不同的应用场合中都可以发挥不同的作用。
二、自适应模糊控制技术的研究内容自适应模糊控制技术主要涉及以下内容:1. 模糊逻辑控制:模糊逻辑控制技术是自适应模糊控制的核心技术之一,它主要是利用模糊集合理论来描述系统输出与输入之间的关系,并利用模糊逻辑运算来实现对控制信号的生成。
2. 神经网络控制:神经网络控制主要是利用神经网络的学习和训练能力,来实现对系统状态和控制信号的预测和优化。
3. 自适应调节:自适应调节是指控制器可以根据系统实时状态的变化,自适应地调节参数和结构,从而实现更好的控制效果。
在研究自适应模糊控制技术时,需要对以上内容进行深入研究和分析,从而构建出高效可行的控制算法。
三、自适应模糊控制技术的应用自适应模糊控制技术具有很高的应用价值和广泛的应用场景。
主要包括以下几个方面:1. 工业控制:自适应模糊控制技术可以应用于工业领域中的各种控制系统,如机器人控制、加工机床控制、自动化生产线控制等。
在这些应用场合中,自适应模糊控制技术可以实现对生产过程的智能化、自动化控制,提高生产效率和产品质量。
2. 交通控制:自适应模糊控制技术可以应用于城市交通控制系统中,通过对车流量、红绿灯时序等多个因素进行综合分析和控制,实现城市交通的高效运转和拥堵缓解。
基于DSP和模糊控制的巡线机器人控制系统设计与实现
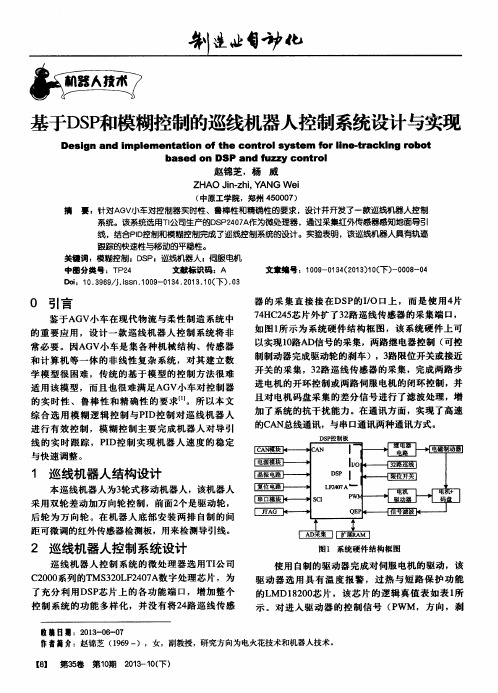
器 的采 集直 接 接 在 DS P 的I / O口上 ,而 是 使 用4 片 7 4 HC 2 4 5 芯 片外 扩 了3 2 路巡 线传 感器 的 采集端 口,
如 图1 所 示 为 系统 硬 件结 构 框 图 ,该 系统 硬 件 上 可 以实现 1 0 路A D信号 的采集 ,两路 继 电器 控制 ( 可 控 制制 动器 完成驱动 轮 的刹 车 ),3 路 限位开 关或接 近 开 关 的采 集 ,3 2 路巡 线传 感器 的采集 ,完成 两路 步
的实时性 、鲁棒性和精确性的要求【 ” 。所以本文 综 合 选 用 模 糊 逻 辑 控 制 与P I D控 制 对 巡 线 机 器 人
进 行 有 效 控制 ,模 糊控 制 主 要 完成 机 器人 对 导 引 线 的实 时 跟 踪 ,P I D控 制 实 现 机 器 人 速 度 的 稳 定
与快速 调 整 。
加 了系统 的抗 干扰 能 力 。在通 讯 方面 ,实现 了高 速
的C AN总线通讯 ,与串 口通讯 两种通 讯方式 。
DS P控 制 板
1 巡线机器人结构设计
本 巡 线机 器人 为3 轮式 移动 机器 人 ,该机 器 人 采用双 轮 差动 加 万 向轮控 制 ,前 面2 个 是驱动 轮 , 后轮 为 万 向 轮 。在机 器 人 底 部 安 装两 排 自制 的 间
系统。该系统选用T I 公 司生产 的D S P 2 4 0 7 A 作为微处理器 ,通过采集红外传感器感 知地面导引
线,结合P I D 控制和模糊控制完成了巡线控制系统的设计。实验表明 , 该巡线机器人具有轨迹 跟踪的快速性与移动的平稳性。
关键词 :模糊控制 ;D S P;巡线机器人 ;伺服 电机 中囝分类号 ;T P2 4 文献标识码 :A 文章编号 :1 0 0 9 — 0 1 3 4 ( 2 o l 3 ) 1 0 ( 下) 一 0 0 0 8 — 0 4
基于DSP、FPGA和模糊自调整PID控制的仿人机器人控制系统的设计与实现

s o gaf a igcpbly ihrl bly t.T ersac okpasa c v o efr e ee p et f h h l t n n  ̄ mmn aait,hg i it,e r i i ea i c h eerhw r l nater ei t t rdvl m n o ew o y i l nh uh o t e
步发展起着积极作用 。 关键词 :仿人机器人 ;双 D P;反馈 回路 ;F G S P A; 自调整 PD I 中图分类号 :T 1 ;T 1 P3 P 8 文献 标识码 :A 文章编号 :10 3 8 2 1 )2 0 1— 8 1(0 1 1—11— 0 4
Dei n a d Re l a in o m a od Ro o n r lS se sg n ai t fHu n i b tCo to y tm z o
a tn mo s h ma o d r b t . u o o u u n i o o s
Kew rs u aodrbt u S ;Fe bc o ;F G y o d :H m n i o;D a D P ed akl p P A;S lajsn I o l o e -dut gPD f i
b c o e i n A slajsn I ot ls a g ae uz rlsW rpsd bsdo u igeg ot lter. akl pw r g e . e -d t g PD cnr t t ybsdfzy ue a pooe ae n ctn —decn o hoy o e v f ui o r e s t r
T r u h t e MAT AB smu ai n t e r s l h w c n rl s se C e e e d d i t h b t o y, i h s smp e sr cu e ho g h L i lt , h e ut s o o t y t m a b mb d e n o t e r o’ b d o s o n o S t a i l tu tr ,
基于DSP的模糊控制伺服系统的设计

基于DSP的模糊控制伺服系统的设计【摘要】随着工业技术的不断发展和更多自动化产品的应用,人们对步进电动机的应用系统提出了更高的性能要求。
步进电动机的开环系统在工作状态时出现的失步和振荡等一系列问题日益突出。
为了获得更加平稳的运行过程,更高的定位精度,更宽的调速范围和便于使用等要求,人们展开了对步进电动机的闭环驱动控制系统研究,同时,这也促进了各种形式的自动化控制的步进电动机伺服系统的出现。
本文在根据伺服控制应用并分析控制伺服系统对DSP性能方面的基本要求,提出了主要针对DSP对步进电动机的模糊伺服控制系统的设计,有助于用户可以根据相应的控制要求来合理的选择DSP芯片,并以此来提高生产产品的性能和用户对产品的满意度。
【关键词】步进电动机模糊控制伺服系统DSP芯片一、混合式步进电动机和模糊控制简介目前对于混合式步进电动机中伺服控制系统的研究相对落后,因为步进电动机不同于一般的电动机,它的结构很特殊。
由于步进电动机的内部个控制变量间相互耦合且呈现出高度非线性状态,导致难以用简单的数学控制应用模型来表述。
如何才能获取能够反映混合式步进电动机内部工作机理的高精度数学模型以此来解决系统中出现的不确定信息,从而达到满意的控制效果,在研究的过程中,人们发现模糊控制是一种相对较好的选择。
模糊控制作为一种直接模拟人类思维结果的控制方式,已广泛应用于工业控制领域。
在模糊控制系统中,可以采用反激法来消除对磁阻式步进电动机的振荡。
由于模糊控制的模糊性,因此很难达到较高的稳态精度,需要对整个动态过程采用模糊控制,当系统误差出现到某一较小区间范围时采用PID控制,使其达到更高的性能。
图1展示了模糊控制器的结构框图。
图1 为模糊控制器结构图二、DSP芯片功能概况经过最近几年的高速发展,DSP芯片已逐渐取代了传统上的单片机成为伺服控制领域的主流控制芯片。
对控制领域起着重要作用的DSP芯片是传统的DSP 与单片机相结合的产物。
作为高性能控制器的DSP芯片,已广泛应用在伺服控制系统中。
基于 DSP 的电子负载:模糊自适应整定 PID 控制策略
基于DSP 的电子负载:模糊自适应整定PID 控制策略
4.3含糊自适应整定PID控制策略
在实际调试过程中,现场被控测试对象参数未知,负载电源板和信号板上打规模的模拟器件的引进,存在控制信号惯性滞后性,使得常规PID 控制器往往不能达到抱负的控制效果,为了进一步提高PID控制的性能,以适应复杂的工况和高性能指标的控制要求,含糊PID控制就是针对控制信号时延而提出的,将传统的PID调整技术和含糊控制技术相结合,利用含糊规律对PID调整器的参数举行调整以补偿模拟器件延时对系统的影响。
因此,本系统引入含糊控制理论设计一个含糊PID控制器,按照实时监测的或值的变幻,利用含糊控制规章自动调节PID控制器的参数。
电子负载系统信号板控制的核心部件是,在恒定的漏源电压下,它的漏极电流和栅源电压成非线性变幻,而且随着漏源电流的变幻导致MOSFET的温升,其转移特性曲线处于变幻的过程中。
在PID控制器中引入智能控制算法,使电子负载控制精度进一步提高,将对电子负载调试的阅历作为学问中,使DSP按照现场实际的状况,自动调节PID 参数,成为具有PID参数自整定功能的智能调整器。
因为阅历不易精确的描述,控制过程中各种信号及评价指标不易定量的表示,含糊理论是解决这一难题的最好办法,运用含糊控制规章,DSP按照电子负载系统的实际响应状况,运用含糊推理,实现对PID 参数的自动调节,这就含糊自适应PID控制。
以误差e和ec作为输入,按照偏差e和偏差变幻率ec的变幻,利用含糊控制规章在线对PID参数举行在线的修改,通过公式
不断地调节PID控制器中三个参数,以满足不同时刻PID参数自整定的要求,其机构4.7所示。
第1页共6页。
基于DSP的无刷直流电机P-模糊自适应PID控制系统
现代驱动与控制
基于DS 的无刷直流电机P模糊 自适应P D控制系统 P _ I
刘兴艳 董 洋洋
河南理工大学 ( 5 0 3 440 )
P f z e fa a tv D n r lS s e f rBL CM s d o S - uz y S l- d p i e PI Co t o y t m o D Ba e n D P
制硬件, 从而为模糊算法 的应用和形成B DC L M 全数字式 的模糊控制系统奠定了基础。
图1 p模糊PD控制系统 图 - I
P 模糊 自适应 P D控制选择 一个 阈值E , . I P
《 机技 术》2 1 年第 3 ・ 3 电 01 期 2・
提 出一种新 型的P 模糊 自适应 P D控制方 法且 采用T S . I M 30 F47 2 L 2 0 ADS 作为处 理器。 P 实验 结果 表 明: 模糊控 该 制 系 统 运 行 平稳 , 有 较 高 的控 制 精度 和 较 好 的 鲁棒 具 性 , 现了P模 糊 自适应 PD控制 系统的数 字化 。 实 . I 关键词 : 刷直流 电机 无
1 P 模糊P D控 制系统 . I
要提高基 本模 糊控制系统的精度和跟踪性
能, 就必须对 语言变量取较多的语言值, 但是分
级越细规 则数和系统 的计算量也越大 , 调试会很
困难或者不能满足实 时控制的要求 。 要解决这个
矛盾就 是在论域 内用不 同的控制方式 分段实行 控制。 . P模糊 自 适应PD I 控制系统分为P 控制和模 糊自 适应 P D控制两个模 态分段 控制 , I 控制系统
复 杂和 模型不 清楚 的系统 进行简单而 有效 的控 制 , 挥模 糊控制鲁棒 性强 、 发 动态 响应 好、 上升 时间快和超调小 的特点, 又具有P D I 控制器的动
基于DSP的模糊自适应PID伺服电机控制系统概要

研究与设计ξEMCA2007,34(10基于D SP的模糊自适应P I D伺服电机控制系统尹进田,李白雅,黄海(湖南科技大学信息与电气工程学院,湖南湘潭411201摘要:提出一种基于数字信号处理器(DSP的伺服电机控制系统。
在综合分析伺服电机控制系统的动静态性能的基础上,对其控制策略进行了研究,开发了一套基于DSP的模糊自适应P I D伺服电机控制系统,提高了系统的动静态性能;同时对系统中的数字电流环的滤波器进行了设计,改善电流环的控制效果,从而提高伺服电机控制系统的整体性能。
关键词:数字信号处理器;伺服电机;模糊自适应P I D控制;滤波器中图分类号:T M301.2∶T M303.4文献标识码:文章编号:167326540(20071020008203Fuzzy Adapti ve P I D Con trolli n g of Servo M otor System Ba sed on D SPY I N J in2tian,L I B ai2ya,HUAN G Hai(College of I nfor mati on&Electrical Engineering,Hunan University of Science andTechnol ogy,xiangtan,411201Abstract:A digitized servo mot or contr ol syste m based on DSP is p resented.Based on the synthetic analysis of the dyna m ic and static perf or mance of a servo contr ol system,the contr ol is studied strategy and a DSP based servo mot or contr ol syste m of A fuzzy adap tive P I D contr oller is devel oped,p r omoting its dyna m ic and static perf or mance, at one ti m e,carried on a design t o the filter of the full2digital current wreath in the syste m,s o as t o i m p r ove contr ol of current l oop and overall perf or mances of servo mot or contr ol syste m.Key words:d i g it a l si gna l processor;servo m otor;fuzzy adapti ve P I D con trol;f ilter0引言一个运动控制系统通常包括控制器、电机(包括负载和传感器这几个部分(见图1。
自适应模糊控制在航空飞行控制中的应用研究
自适应模糊控制在航空飞行控制中的应用研究随着民航业的发展,越来越多的人开始关注航空安全问题。
而自适应模糊控制(AFC)作为近年来发展迅速的一种控制方法,被广泛应用于航空飞行控制中。
本文将探讨自适应模糊控制在航空飞行控制中的应用研究。
一、自适应模糊控制自适应模糊控制是一种基于模糊逻辑的控制方法,能够根据系统状态的变化自动调整控制规则和控制参数,从而实现对系统的精确控制。
自适应模糊控制系统一般由以下三个部分组成:1. 模糊推理部分:对输入的模糊量进行模糊推理,得出输出的模糊量。
2. 自适应控制部分:根据系统状态和输出模糊量的误差来自适应地调整控制规则和参数,以实现系统控制的精度和稳定性。
3. 输出反馈部分:将控制结果反馈给系统,进行实际控制。
二、自适应模糊控制在航空飞行控制中的应用航空飞行控制中的自适应模糊控制系统主要应用于飞机的姿态控制和飞行轨迹控制。
1. 姿态控制姿态控制是指对飞机的俯仰、滚转和偏航角进行控制,以保证飞机的稳定性和安全性。
传统的姿态控制方法主要采用PID控制方法,但由于飞机的航行状态具有不确定性、非线性和时变性,所以传统的控制方法控制精度较低。
而自适应模糊控制方法可以根据飞机的不确定性和时变性来自适应地调整控制规则和参数,从而提高姿态控制精度和稳定性。
目前,自适应模糊控制方法已经应用于商用飞机和军用飞机的姿态控制中,并取得了良好的效果。
2. 飞行轨迹控制飞行轨迹控制是指对飞机的航向、高度和速度进行控制,以实现飞机的航行计划。
传统的飞行轨迹控制方法主要采用PID控制方法,但由于飞机的飞行环境和计划的变化,传统的控制方法很难满足飞行轨迹控制的需求。
而自适应模糊控制方法可以根据飞机的飞行环境和计划变化来自适应地调整控制规则和参数,从而实现对飞行轨迹的精确控制。
目前,自适应模糊控制方法已经应用于商用飞机和军用飞机的飞行轨迹控制中,并取得了良好的效果。
三、自适应模糊控制在航空飞行控制中的局限性然而,自适应模糊控制方法也存在一些局限性。
基于DSP的神经自适应模糊控制器的应用
基于DSP的神经自适应模糊控制器的应用摘要模糊控制器应用在许多领域,但由于其控制参数的不稳定性,导致其控制效果达不到控制要求。
本文提出了一种将神经网络与模糊控制器相结合的方法,并应用于基于DSP的变频调速系统中。
对系统进行仿真实验后,从仿真结果可以得出:该系统具有较好的控制性能,且能达到较高的控制精度。
关键词DSP;神经自适应模糊控制;MATLAB仿真中图分类号TM346 文献标识码 A 文章编号1673-9671-(2012)071-0190-01模糊控制具有较强的不确定性知识表达能力,但其自学习能力比较困难;神经网络具有较强的自学习、自适应能力,但其对不确定知识的表达能力比较困难。
因此针对双方的特点相互借鉴和利用,形成的新的结构体系——模糊神经网络。
这种新技术充分利用神经网络的自学习、自适应能力,在线调整模糊规则,使模糊控制在保持其较强的知识表达能力的同时,并能提高其自适应能力。
1 神经自适应模糊控制器神经自适应模糊控制器的结构如图1所示。
其中,nr为速度给定值,nf为速度反馈值,e为速度偏差,E为转速偏差,u为输出控制量,K1,K2分别是E和ΔE的量化因子,K3为u的比例因子。
对于模糊控制器来说,提高控制性能的关键是调整控制规则,可由u≈-(E+ΔE)/2来近似归纳其控制查询表。
本文在此基础上引入一个加权系数α,因此又可表示为u≈[αE+(1-α)ΔE],通过调整α值,可以改变E、ΔE对u的加权程度,使控制规则的调整变得更为方便,从而提高控制性能。
2 控制系统的硬件设计系统的硬件设计部分采用TMS320LF2407A来实现智能速度控制,系统由主电路、控制电路、驱动隔离电路和保护电路等组成。
主电路采用交—直—交的间接变频装置;逆变部分采用IPM功率模块来控制驱动电路;控制回路包括DSP、LED显示电路、键盘接口电路、电流检测电路、电压检测电路、电动机转速和位置检测电路等。
为了以防加电瞬间冲击,过流、过压等故障损坏整流模块和IPM 模块,系统在主电路设置了充、放电电阻和泄能回路。
基于DSP的平台稳定系统模糊自适应控制研究的开题报告
基于DSP的平台稳定系统模糊自适应控制研究的开题报告一、研究背景及意义数字信号处理(DSP)在现代控制理论中占有重要地位,可以实现高效、精确的控制。
而稳定系统模糊自适应控制则是一种在未知系统和干扰下实现稳定控制的方法,具有较高的应用价值。
因此,基于DSP的平台稳定系统模糊自适应控制的研究具有重要的理论和应用意义。
其可以广泛应用于航空、航天、机械、通信、电力等领域,对提高产品质量、降低生产成本、改善产品可靠性具有现实意义。
二、研究内容及方法本研究将基于DSP平台,探索稳定系统模糊自适应控制的关键技术,主要研究内容包括:1. 稳定系统的建立及基本特征分析。
2. 模糊自适应控制器的设计及特性分析。
3. DSP平台的选择、搭建及调试。
4. 在DSP平台上实现稳定系统的模糊自适应控制。
5. 实验验证及性能分析。
研究方法主要采用理论分析与实验研究相结合的方式。
首先,通过对稳定系统和模糊自适应控制器的分析,设计出适合于DSP平台的控制系统。
接着,在DSP平台上搭建实验系统,进行实验验证,并对实验结果进行性能分析。
三、研究计划及预期成果本研究计划周期为1年,主要工作内容及时间安排如下:1. 第1-2个月:文献调研,了解国内外稳定系统模糊自适应控制的研究进展及现状。
2. 第3-5个月:系统建模与控制器设计,根据文献调研结果,确定DSP平台、稳定系统和模糊自适应控制器的设计方案。
3. 第6-9个月:DSP平台搭建与控制器实现,将设计好的控制系统实现在DSP平台上,并进行调试。
4. 第10-11个月:实验验证与性能分析,对在DSP平台上实现的控制系统进行实验验证,对实验结果进行性能分析。
5. 第12个月:总结归纳,撰写论文。
预期成果包括:1. 稳定系统模糊自适应控制的DSP实现方法。
2. 实验验证结果及性能分析报告。
3. 相关技术的发展前景及应用前景分析。
四、研究条件及保障本研究所需的条件及保障主要包括:1. DSP开发平台及软件2. 实验室设备:数字示波器、功能发生器、多用表等。
基于DSP的模糊自适应PI交流调速系统的开题报告

基于DSP的模糊自适应PI交流调速系统的开题报告1.研究背景随着电力电子技术的快速发展,交流调速系统在工业自动控制领域中得到了广泛的应用。
作为交流调速系统的核心控制器,交流调速系统的性能优良与否直接影响到系统稳定性、响应速度等指标。
其中PI控制器是较为常用的控制器,在实际应用中能够实现良好的调节效果。
但是,在一些存在非线性和时变因素的环境下,常规的PI控制器可能无法良好地适应系统状态变化,从而导致系统性能下降。
因此,研究一种适用于非线性和时变环境下的更加优良的控制策略就显得尤为重要。
2.研究意义本研究旨在基于DSP实现一种模糊自适应PI控制策略,通过灵活的控制方式,可以实现对非线性和时变系统的有效控制。
其具有以下几方面的研究意义:(1)优化交流调速系统的控制器,提高系统的稳定性和响应速度。
(2)研究模糊自适应控制策略,进一步拓宽控制系统的应用范围。
(3)实现技术创新,提高交流调速系统的智能化水平。
3.研究内容本研究的主要内容包括:(1)探究DSP技术在交流调速系统中的应用,了解DSP的基本概念和工作原理。
(2)研究模糊自适应控制的理论原理和应用方法,探究模糊控制在非线性系统中的优越性。
(3)设计模糊自适应PI控制算法,通过对反馈控制信号进行模糊处理,实现对 PI 系数的自适应调节。
(4)基于MATLAB/Simulink进行仿真实验,验证模糊自适应PI控制算法的有效性和优越性。
(5)在硬件上实现模糊自适应PI控制系统,在实际环境中测试其控制效果,并与常规PI控制器进行对比分析。
4.研究方法本研究采用如下研究方法:(1)文献调研:对当前交流调速系统中控制策略进行综合分析,并阅读相关领域的文献,了解模糊自适应控制器的基本原理和应用方法。
(2)理论分析:通过对目前使用的控制器进行分析,探究其存在的缺陷,并结合模糊自适应控制方法,设计出可靠的控制策略。
(3)仿真实验:通过MATLAB/Simulink对设计的控制策略进行仿真分析,验证控制策略的有效性和优越性。
基于DSP的自适应神经元网络控制系统的研究
基于DSP的自适应神经元网络控制系统的研究仲恒;李定远【期刊名称】《工业控制计算机》【年(卷),期】2015(000)002【摘要】Hydraulic system of large equipment must be supported by oil pressure which should be maintained at a stable value. ln this paper,a neuronal network control system based on DSP is designed to control the frequency of the pump motor to make the oil reach a stable value.As the hydraulic value wil fluctuate in the actual operation,so the speed and stability is the key to the control system.The simulation test confirmed the validity of this method.%某大型设备的液压系统在工作中需要一定的油压对其进行支撑,所以要保证油压根据要求维持在某一稳定值。
针对于此,研究并设计了一个基于DSP的自适应神经元网络控制系统,通过该控制算法可以调整油泵电机的频率使得油压达到要求的稳定值。
由于该液压控制系统在实际运行中油压值会出现波动,因此调节的快速性和稳定性是本控制系统的关键。
该控制算法经由现场采样和实验的仿真测试,证实了其有效性。
【总页数】3页(P66-68)【作者】仲恒;李定远【作者单位】上海大学机电工程与自动化学院,上海 200072;上海大学机电工程与自动化学院,上海 200072【正文语种】中文【相关文献】1.基于DSP-PIC自适应动态无功补偿控制系统的研究 [J], 文伟2.基于DSP的前馈式自适应有源低频噪声控制系统设计 [J], 陈智;王贵锋;李峰;傅龙飞;闫璞;柳莺3.基于DSP的自适应速度辨识直接转矩控制系统研究 [J], 别红波;徐中4.一种基于DSP的异步电动机直接转矩神经元网络控制系统 [J], 常宇健;杨卫东;姚明琳5.基于DSP的自适应主动噪声控制系统研究 [J], 周洁敏;敖婷;林刚;宫淑丽因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于DSP的神经自适应模糊控制器的应用
摘要模糊控制器应用在许多领域,但由于其控制参数的不稳定性,导致其控制效果达不到控制要求。
本文提出了一种将神经网络与模糊控制器相结合的方法,并应用于基于DSP的变频调速系统中。
对系统进行仿真实验后,从仿真结果可以得出:该系统具有较好的控制性能,且能达到较高的控制精度。
关键词DSP;神经自适应模糊控制;MATLAB仿真
中图分类号TM346 文献标识码 A 文章编号1673-9671-(2012)071-0190-01
模糊控制具有较强的不确定性知识表达能力,但其自学习能力比较困难;神经网络具有较强的自学习、自适应能力,但其对不确定知识的表达能力比较困难。
因此针对双方的特点相互借鉴和利用,形成的新的结构体系——模糊神经网络。
这种新技术充分利用神经网络的自学习、自适应能力,在线调整模糊规则,使模糊控制在保持其较强的知识表达能力的同时,并能提高其自适应能力。
1 神经自适应模糊控制器
神经自适应模糊控制器的结构如图1所示。
其中,nr为速度给定值,nf为速度反馈值,e为速度偏差,E为转速偏差,u为输出控制量,K1,K2分别是E和ΔE的量化因子,K3为u的比例因子。
对于模糊控制器来说,提高控制性能的关键是调整控制规则,可由u≈-(E+ΔE)/2来近似归纳其控制查询表。
本文在此基础上引入一个加权系数α,因此又可表示为u≈[αE+(1-α)ΔE],通过调整α值,可以改变E、ΔE对u的加权程度,使控制规则的调整变得更为方便,从而提高控制性能。
2 控制系统的硬件设计
系统的硬件设计部分采用TMS320LF2407A来实现智能速度控制,系统由主电路、控制电路、驱动隔离电路和保护电路等组成。
主电路采用交—直—交的间接变频装置;逆变部分采用IPM功率模块来控制驱动电路;控制回路包括DSP、LED显示电路、键盘接口电路、电流检测电路、电压检测电路、电动机转速和位置检测电路等。
为了以防加电瞬间冲击,过流、过压等故障损坏整流模块和IPM 模块,系统在主电路设置了充、放电电阻和泄能回路。
3 控制系统的软件设计及仿真实验
系统程序包括主程序和两个中断服务子程序。
主程序主要负责DSP初始化、速度环运算及故障诊断工作;PWM中断程序主要负责AD转换、SPWM输出以及串行通信等;串行口中断服务程序负责电机参数的接收。
为了验证本设计的科学性和合理性,对整个变频调速控制系统进行仿真实验。
实验中采用型号为Y160M2-2的异步电动机,主要参数为:额定功率1.2 kw,额定转速1420 r/min,额定电流3.8 A,额定电压380 V。
本文同时给出了神经自适应模糊控制器和传统PID控制器的仿真响应曲线,以便于性能比较。
仿真结果如下图所示。
通过比较两者的响应曲线可以看出,神经自适应模糊控制速度调节器,在动态性能方面,其转速响应曲线更为平滑,超调量更小;稳态性能方面,其稳态误差明显小于传统PID控制,说明其稳态性能要优于传统PID控制。
4 结束语
本文基于模糊神经网络的控制方法,利用神经网络的自学习、自适应能力,
有效地解决了单纯模糊控制中控制规则太固定这一问题,控制精度得到有效的提高。
实验结果表明,基于模糊神经网络控制的变频调速系统有较好的动态性能和稳态性能,其转速响应曲线更为平滑,超调量更小。
图2 传统PID速度调节器转速响应曲线
图3 神经自适应模糊控制速度调节器转速响应曲线
参考文献
[1]薛斯远.矿井提升机的模糊控制系统设计[D].太原:太原理工大学,2007.
[2]周延,肖海燕.基于TMS320LF2407A的SVPWM变频系统的设计[J].现代电子技术,2007,19:160-162.
[3]LASCU C.A modified direct torque control for induction motor s ensorless drive [J].IEEE Trans on Ind Applications, 2000, 36(2):23-26.
[4]廖华平,程小华.基于DSP的SVPWM矢量控制变频系统研究[J].微电机,2006,39(9):71-73.。