基于labview的车牌识别停车系统设计
《2024年基于MATLAB的车牌识别系统研究》范文

《基于MATLAB的车牌识别系统研究》篇一一、引言随着智能交通系统的快速发展,车牌识别技术已成为智能交通系统的重要组成部分。
车牌识别技术能够有效地对车辆进行身份识别、交通监控、违法查处等,对于提高交通管理效率和保障交通安全具有重要意义。
本文将基于MATLAB平台,对车牌识别系统进行深入研究。
二、车牌识别系统概述车牌识别系统主要由图像采集、预处理、特征提取和识别四个部分组成。
首先通过摄像头等设备采集包含车牌的图像,然后对图像进行预处理,包括去噪、二值化、边缘检测等操作,使车牌图像更加清晰。
接着,通过特征提取算法提取出车牌上的字符特征,最后通过识别算法对字符进行识别,实现车牌号码的识别。
三、MATLAB在车牌识别系统中的应用MATLAB是一种强大的数学计算软件,具有强大的图像处理和机器学习功能,非常适合用于车牌识别系统的研究和开发。
在车牌识别系统中,MATLAB可以用于图像预处理、特征提取和识别等各个环节。
1. 图像预处理在MATLAB中,可以使用图像处理工具箱中的各种函数对车牌图像进行预处理。
例如,可以使用imread函数读取图像,使用imnoise函数添加噪声模拟实际环境中的干扰,使用gray2ind 函数进行图像二值化等。
此外,MATLAB还提供了许多滤波器和边缘检测算法,如Sobel算子和Canny算子等,可以用于去除图像中的噪声和增强边缘信息。
2. 特征提取特征提取是车牌识别系统中的关键环节。
在MATLAB中,可以使用各种算法对车牌图像进行特征提取。
例如,可以使用投影法、连通域法等算法对车牌字符进行分割和定位,然后使用模板匹配、神经网络等算法对字符进行特征提取和分类。
此外,MATLAB还提供了许多机器学习算法,如支持向量机、决策树等,可以用于训练和优化车牌识别模型。
3. 识别算法在特征提取后,需要使用识别算法对字符进行识别。
在MATLAB中,可以使用各种分类器对字符进行识别。
例如,可以使用最近邻分类器、贝叶斯分类器等基于统计的分类器,也可以使用神经网络、支持向量机等基于机器学习的分类器。
《2024年基于MATLAB的车牌识别系统研究》范文

《基于MATLAB的车牌识别系统研究》篇一一、引言车牌识别(License Plate Recognition,简称LPR)系统是一种智能化的图像识别系统,被广泛应用于公安交通、车辆管理等重要领域。
其作用是通过识别和读取车牌号码信息,提高车辆管理和安全控制的效率和精度。
本文将基于MATLAB软件平台,对车牌识别系统进行深入研究,并探讨其应用前景。
二、车牌识别系统概述车牌识别系统主要包括图像预处理、车牌定位、字符分割和字符识别等四个主要步骤。
其中,图像预处理是提高图像质量、去除噪声和增强图像特征的重要环节;车牌定位则是通过图像处理技术,将车牌从复杂背景中提取出来;字符分割则是将车牌上的字符进行分割,以便于后续的字符识别;字符识别则是通过机器学习、深度学习等技术,对分割后的字符进行分类和识别。
三、MATLAB在车牌识别系统中的应用MATLAB是一种强大的数学计算软件,具有强大的图像处理和机器学习功能。
在车牌识别系统中,MATLAB可以用于图像预处理、车牌定位、字符分割和字符识别的全过程。
1. 图像预处理在MATLAB中,可以使用图像处理工具箱中的各种滤波器、直方图均衡化等技术,对图像进行去噪、增强等预处理操作,以提高图像质量和特征提取的准确性。
2. 车牌定位MATLAB中提供了多种图像处理算法,如边缘检测、形态学处理等,可以用于车牌的定位。
通过这些算法,可以从复杂的背景中提取出车牌区域,为后续的字符分割和识别提供基础。
3. 字符分割在MATLAB中,可以通过投影法、连通域法等算法,对车牌区域进行字符分割。
这些算法可以有效地将车牌上的字符进行分割,为后续的字符识别提供方便。
4. 字符识别MATLAB中集成了多种机器学习和深度学习算法,可以用于字符的分类和识别。
通过训练分类器或神经网络等模型,可以对分割后的字符进行准确的分类和识别。
四、实验结果与分析本文通过实验验证了基于MATLAB的车牌识别系统的有效性和准确性。
基于Labview Vision的车牌识别方案的研究
科菽.傕济•市杨技术平台基于Labview Vision的车牌识别方案的研究管宇(南京交通职业技术学院电子信息工程学院,江苏南京211188)摘要:随着智能交通业的发展和5G时代车联网的普及,对车辆车牌的识别显得尤为重要。
通过车牌识别,能够让交通部门迅速掌握车辆的运行情况,高效实行车辆管制,还可以方便停车场实现车辆自动记录,减少车辆进出停车场的等待时间。
采用Labview Vision软件和PC机对车牌识别方案进行了研究,自行设计了车牌识别的虚拟仪器,并验证了方案的可行性。
关键词:虚拟仪器;图像处理;车牌识别0引言在当代智能交通、安全出行的大背景下,交通部门能够通过车牌识别,及时了解车辆的信息,提高交通管理效率。
通过自动车牌识别,能让汽车在进出小区或者进出停车场时,减少等待时间。
因此,设计一款高效的车牌识别系统有很强的实用性。
本文提出了一种基于Labview Vision的车牌识别方案,自行开发了车牌识别虚拟仪器。
首先进行开发环境的介绍,然后重点提出一种可行性设计方案。
分别从样本文件的产生、车牌图像的预处理和车牌的识别与显示这三个模块加以阐述,在分析过程中,给出详细设计过程、功能描述以及验证结果。
1开发环境与函数库Labview Vision软件中有视觉助手,方便辅助进行样本文本的建立和图片处理。
视觉函数库由三大组成单元,分别是视觉单元、图像处理单元和机器视觉单元。
视觉单元能够进行图像和文件的读和写、参数设定、各种信息的读取、窗口的属性调整,可以为关注区域提供绘图工具,并获得图像上选中区域的信息。
图像处理单元包括分析模块、滤波模块和处理模块。
分析模块能够在任意维度上检测分析灰度和二值图像信息,图像滤波能有效提升图像的质量和清晰度,处理模块可以对黑白或彩色图像进行操作。
机器视觉单元包含光学字符识别模块、设备读取模块以及视觉获取模块等。
光学字符识别模块简称OCR,能够进行图像区域的检验,设备读取模块用于快速条形码、二维码的信息读取,视觉获取模块可以获取来自外设的信息。
电子教案《基于LabVIEW的应用程序设计》(李晴 钱声强)ppt KC10122002-c01-简易停车场管理系统硬件设计
串口通讯协议
停车场 管理
• 波特率19200bps,8位数据位,1位起始位,1位停止位,无校验。 • 命令帧格式:
• //(第一字节10代表帧头) • //(第二字节代表机器地址) • //(第三字节发送时是命令;返回时是数据长度)
5
读/写机器号
停车场 管理
• 读机器地址(GetMacNo)
发送命令: 10 FF
04
46 61 69 6C (‘Fail’)
With UID
发送命令: 10 FF 72 (‘r’) UID (8byte)
正确返回: 10 FF 05
加锁状态 (1byte)
错误返回: 10 FF 04
46 61 69 6C (‘Fail’)
block number (1byte) BlockData (4byte)
蜂鸣器BELL控制
9
读块
停车场 管理
• 读取一个Block (Read a block) Without UID
发送命令: 10 FF 正确返回: 10 FF 错误返回: 10 FF
52 (‘R’) block number (1byte)
05
加锁状态 (1byte) BlockData (4byte)
Without UID
发送命令: 10 FF 4C (‘L’) block number (1byte)
正确返回: 10 FF 04
44 6F 6E 65 (‘Done’)
错误返回: 10 FF 04
46 61 69 6C (‘Fail’)
With UID
发送命令: 10 FF 正确返回: 10 FF 错误返回: 10 FF
6C (‘l’) 04 04
基于labview的车牌识别
字符识别处理
在进行字符识别前,需要对要识别的字符进行 训练,作一个标准的字符集。字符训练的目的是使 随后的读程序能识别其它图象中的相同字符。在本 系统中,使用OCR Training Interface 完成字符的训练 该接口主要完成训练和编辑字符两个过程。在 训练字符时,通过相应的阈值分割、指定的感兴趣区 域和调节字符间距等操作,完成单个字符的分割,纠 正不正确的字符。通过编辑字符,完成字符集的制 作。制作字符集后 ,用OCR 函数创建的机器视觉程序来读 字符。 右图为字符训练和读取程序框图
系统工作原理图如右图所示
系统工作流程
图像预处理程序对获取的车牌图像进行滤波、 边界增强、灰度化等处理,以便进行后续的处理。 车牌定位模块从处理后的图像中找到车牌区域的位置并进行 标记,将车牌区域从复杂的背景中分割出来,它是车 牌字符识别的前提,也是车牌识别的关键技术。 字符分割是将已提取出的车牌区域分割成单个的字符。字符 识别模块是车牌识别系统的核心模块之一,其算法的优劣直接影 响到系统识别率的高低。在字符识别过程中,由于实际使用条件 存在诸多干扰因素,这些对识别算法提出了很高的要求。
可识别车牌照的百分率=人工正确读取的车牌照总数/实际通过的车辆总数 可识别全牌正确识别率=全牌正确识别的车牌照总数/人工读取的车牌照总数
2.识别速度
识别速度决定了一个车牌识别系统是否能够满足实时实际应用的 要求。一个识别率很高的系统,如果需要几秒钟,甚至几分钟才 能识别出结果,那么这个系统就会因为满足不了实际应用中的实 时要求而毫无实用意义
3.后台管理
后台管理的功能包括:识别结果和车辆图像数据的可靠存储;有 效的自动比对和查询技术;对于联网运行,还需要提供实时通信 、网络安全、远程维护、动态数据交换、数据库自动更新、硬件 参数设置、系统故障诊断。
基于LabVIEW图像法车牌智能识别系统
基于LabVIEW图像法车牌智能识别系统王党树;王新霞【摘要】车辆牌照自动识别是实现交通管理智能化的重要环节,设计中利用图像采集卡对经过的车辆车牌进行图像采集并传送至计算机,采用美国NI公司LabVIEW 软件,实现图像预处理、图像去噪以及图像增强等功能;然后根据车牌颜色特征对其准确定位,采用阈值法分割车牌字符;最后由OCR函数来识别字符,识别结果保存至相应数据中,可以进行相应的违章、违规智能交通管理,经实验该系统成功实现车牌识别识别率达99%.【期刊名称】《计算机测量与控制》【年(卷),期】2015(023)008【总页数】4页(P2871-2874)【关键词】车牌识别;LabVIEW;视觉开发模块【作者】王党树;王新霞【作者单位】西安科技大学电气与控制工程学院,西安710054;西安科技大学理学院,西安710054【正文语种】中文【中图分类】TM206智能化交通系统(intelligent transportation system,ITS)是一种准确、高效并且实时性很强的交通运输管理系统,该系统的搭建需要综合运用通讯、信息、控制、传感、计算机等各个方面的技术[1]。
其中汽车牌照识别技术[2](license plate recognition system,IPRS)是智能交通系统研究较为重要的领域,也是当今社会的热门研究课题,其主要的应用场所有:停车场、公路自动收费站、居民小区等。
而车辆牌照中的车牌号码是车辆身份信息的唯一标志,车牌信息的自动识别是实现交通管理系统智能化的前提。
车牌识别系统是一个集图像处理、模式识别等的高度智能化集成体系,其硬件主要由CCD摄像机、PCI图像采集卡和计算机构成,系统方案原理如图1所示。
当有车辆经过传感器时,传感器将产生电信号并传至PCI数据采集卡,采集卡进行数据采集,再将采集到的车辆图像信息传输到计算机上。
计算机对接收的图像预处理,图像处理后通过适当算法将图像中车牌区域定位出来,若欲对车牌进行识别还需将所定位出的车牌上的字符与其背景进行分割,提取车牌字符,最后经过字符识别处理达到车牌智能识别的功能。
基于labview的车牌识别
字符识别处理
下图为字符识别的流程图
识别结果
如右图图GUI所示,系统 界面主要分为四大部分。 最左为所选车牌原图像, 右上为车牌定位后的图像, 右中为车牌分割后的车牌 图像,右下为系统识别的 车牌号码。
软件演示
系统的技术指标
1. 识别率
自然交通流量的识别率=全牌正确识别总数/实际通过的车辆总数
识别流程图
图像预处理
预处理流程为:先选取一张图片,然后进行读取操作, 重新定义图像大小然后进行灰度化,提取绿色分量,然后 输出到下一帧。这一步骤可以大幅度地改进和完善车辆图 像,尤其是车牌区域的图像清晰度,能够更好的识别图像 。 灰度化:彩色图像包含着大量的颜色信息,不但在存储 上开销很大,而且在 处理上也会降低系统的执行速度。由 预处理流程为:先选取一张图片,然后进行读取操作,重新定义图像大小 然后进行灰度化,提取绿色分量,然后输出到下一帧。这一步骤可以大幅 于图 像的每 个 象素都具有三个 不同的颜 色分t,存在许 多 度地改进和完善车辆图像,尤其是车牌区域的图像清晰度,能够更好的识 与识别无关 的信息,不便于进一步的识别工作,因此在对 别图像。 图像进行识别等处理中 经常将彩色图像转变为灰度 图像,以加快处理速度。
车牌定位处理和labview与matlab混合编程
图像经过二值化后,就可以进行车牌定位。通过对比原始 图片,我们可以发现二值化后的图像已经很接近正确的车 牌位置了,因此后期处理将通过这张图来找出车牌位置。 LabVIEW集成了大量图形界面的模板,自身功能强大,在 测试与测量、过程控制与处理、科学研究和分析等方面有 广泛的应用。但是,在实际应用中,对于一些需要进行大量数 据运算处理的复杂应用,LabVIEW并不能很好的满足系统 对运算速度等方面的要求。 Matlab是一种功能强、效率高、简单易学的数学软件,有 可靠的数值计算和符号计算功能、强大的绘图功能、简单 易学的语言体系以及为数众多的应用工具。用LabVIEW 与Matlab之间的混合编程,在功能上互补,具有实用价值。
基于LabVIEW的HSI颜色空间和数学形态学车牌识别系统
长宽比为 3.14。设 粒 子 的 长 宽 之 比 为 F,则 F∈ 候,图像的处理效果较好。
[2.5,4],利 用 F值 将 车 牌 提 取 出 来。 同 时 将 图
c. 在 经 过 上 述 的 处 理 后 ,当 图 片 拍 摄 的 效 果
片的位置信息输送出去。
不 是 很 好 时,用 LabVIEW 工 具 包 中 的 IMAQ
图 1 车牌识别系统处理过程 2 车 牌 定 位 算 法 验 证
车牌定位是指根据车牌的特征来对车牌的位 置进行有效的定位。车牌定位的准确性直接影响 到后续的处理过程。由于车牌最明显的特征是车 牌的颜色,所 以 基 于 颜 色 的 定 位 是 最 简 单 的。 在 NIVisionDevelopmentModule中,有 RGB、HSV、 HSB及 HSI等色彩 空 间。 由 于 HSI空 间 中 色 调、 饱和度和灰度三 者 互 相 独 立,而 RGB空 间 由 于 3 个分量之间相 互 联 系,其 中 任 何 一 个 的 改 变 都 会 导致 另 外 两 个 需 要 跟 着 改 变,所 以 采 用 HSI作 为 提取车 牌 的 颜 色 空 间。 RGB颜 色 空 间 转 到 HSI
随 着 汽 车 年 销 售 量 的 快 速 增 长,智 能 交 通 系 统显现出越来越重要的作 用。车 牌 识 别 系 统 (Li censePlateRecognition,LPR)作 为 智 能 交 通 系 统 的首个环节,广 泛 应 用 于 封 闭 小 区 车 辆 出 入 的 管 理、高速公路车 辆 实 时 监 控 及 智 能 化 停 车 库 等 方 面 。 [1]
a.将含有车牌的图片从 RGB颜色空间转到
当对车牌进行 完 定 位 之 后,为 了 提 高 车 牌 识
基于LabVIEW的车位管理系统实训设计方案

基于LabVIEW的车位管理系统实训设计方案李福新;白勇民;李灵【摘要】本文基于NI-cRIPO 9025可编程控制器,通过反射式红外光电传感器和触发按钮模拟停车场车辆的出入和泊位信息,利用LabVIEW可视化程序对整个过程进行数据采集和状态监控.整体设计简洁明了,可作为传感器和电子技术课程的综合实验实训项目应用于高职专业课程的实践教学.%In this paper,NI-cRIPO 9025.Programmable controller based on,through the reflection type infrared photoelectric sensor and a trigger button simulation parking field vehicle access and parking information using LabVIEW which is a visual program data acquisition and monitoring of the entire process. The whole design is concise and clear,and it can be applied to the practical teaching of the comprehensive experiment and training project of the sensor and the electronic technology course.【期刊名称】《电子测试》【年(卷),期】2016(000)006【总页数】2页(P9-10)【关键词】智能停车场;LabVIEW;可编程控制器;红外传感器【作者】李福新;白勇民;李灵【作者单位】天津中德应用技术大学,天津,300350;天津中德应用技术大学,天津,300350;天津中德应用技术大学,天津,300350【正文语种】中文随着城市车辆保有量的不断增大,停车问题日益突出,无论是公共场所停车场还是小区停车泊位越来越紧张。
210973588_基于单片机与LabVIEW的自动泊车系统设计与实现

计算机测量与控制!"#""!$#!%""!!"#$%&'()'*+%('#',&-!",&(".!!#"#$!#收稿日期 "#""#*"'$!修回日期 "#""#-"*%基金项目 国家自然科学基金资助项目!(%*'$"%("$陕西省自然科学基础研究计划资助项目!"#"#,Y+*)&"$陕西省重点研发计划项目!"#"%>a+#(("%作者简介 袁子阳!%&&("&男&陕西西安人&硕士研究生&主要从事智能优化方向的研究%熊福力!%&'*"&男&黑龙江肇东人&博士&副教授&硕士生导师&主要从事人工智能与系统优化方向的研究%引用格式 袁子阳&熊福力!基于单片机与D?U b0^<的自动泊车系统设计与实现(,)!计算机测量与控制&"#""&$#!%""*"#$"%#!文章编号 %('%*-&) "#"" %"#"#$#)!!./0 %#!%(-"( 1!2345!%%6*'(" 78!"#""!%"!#$%!!中图分类号 9:"'$!!文献标识码 ;基于单片机与=*?L H R T的自动泊车系统设计与实现袁子阳 熊福力!西安建筑科技大学信息与控制工程学院&西安!'%##--"摘要 为解决狭小空间内的停车问题&采用与实际车辆运动规律类似的汽车模型作为研究对象&设计了一种基于F9R)&R-"单片机与D?U b0^<的自动泊车系统$依据车身大小以及车辆运动规律计算满足泊车条件的最小区域$通过]R<D+%(#%超声波传感器以及霍尔编码器测量车辆与侧方障碍物的距离以及车辆行驶距离&从而搜索满足泊车条件的车位$利用舵机控制车辆前轮转向并通过直流减速电机提供后轮驱动&通过预先设定的程序指令控制车辆完成自动泊车入位$车辆行驶数据经无线<0\0模块发送至上位机&并利用D?U b0^<软件实现车位轮廓'倒车轨迹以及车速实时显示$实验结果表明&该系统可搜索到符合条件的停车区域&并完成车辆的自动泊车入位&具有较强的稳定性和可靠性%关键词 自动泊车$F9R)&R-"单片机$]R<D+%(#%超声波传感器$D?U b0^<<'+16,*,5H#$.'#',&*&1","3>%&"#*&18P*(91,6I@+&'#;*+'5",I1,6.'!:1$)18("8"#$%&'(*,5=*?L H R Ta O;=A5M?3@&c0/=>\S G5!F2B C C G C H03H C I J?75C3g R C37I C G^3@53K K I53@&c5f?3O35P K I Q57M C H;I2B57K27S I K?3L9K2B3C G C@M&c5f?3!'%##--&R B53?">?+&(*8&*03C I L K I7C Q C G P K7B K8I C U G K JC H8?I453@53?3?I I C TQ8?2K&7B K2?IJ C L K G7B?75Q Q5J5G?I7C7B K?27S?G P K B52G KJ C P K J K37 G?T5Q7?4K3?Q7B K I K Q K?I2BC U1K27&?3L?3?S7C J?7528?I453@Q M Q7K JU?Q K L C3F9R)&R-"Q53@G K2B58J52I C2C J8S7K I?3LD?U b0^<5Q L K Q5@3K L!;22C I L53@7C7B K Q5W K C H2?I U C L M?3L7B K G?TC H P K B52G KJ C P K J K37&7B KJ535J S J?I K?5Q2?G2S G?7K L7CJ K K77B K8?I453@2C3+ L575C3Q!]R<D+%(#%S G7I?Q C352Q K3Q C I Q?3LE?G G K32C L K I?I KS Q K L7CJ K?Q S I K7B K L5Q7?32KU K7T K K37B K P K B52G K?3L7B K Q5L KC U Q7?2G K Q QT K G G?Q7B K L I5P53@L5Q7?32K C H7B K P K B52G K&Q C7B K8?I453@Q8?2K5Q Q K?I2B K L7CJ K K77B K Q5W K C H7B K8?I453@?I K?!9B K Q7K K I53@@K?I 5Q S Q K L7C2C37I C G7B K H I C37T B K K G Q7K K I53@C H P K B52G K?3L7B K I K?IT B K K G L I5P K5Q8I C P5L K LU M7B K L5I K272S I I K37!.R"I K L S275C3J C7C I!9B K?S7C J?7528?I453@5Q2C J8G K7K LU M7B K8I K+Q K78I C@I?J53Q7I S275C3!9B K P K B52G K L I5P53@L?7?5Q Q K377C7B K7C82C J8S7K I7B I C S@B 7B KT5I K G K Q Q<0\0J C L S G K&?3L7B KD?U b0^<Q C H7T?I K5Q S Q K L7C I K?G5W K7B K I K?G+75J K L5Q8G?M Q C H8?I453@2C37C S I&I K P K I Q53@7I?24?3L Q8K K LC H P K B52G K!9B KK V8K I5J K37?G I K Q S G7QQ B C T7B?77B KQ M Q7K J2?3Q K?I2B7B K`S?G5H5K L8?I453@?I K??3L2C J8G K7K7B K?S7C J?752 8?I453@&T B52BB?Q7B K Q7I C3@Q7?U5G57M?3L I K G5?U5G57M!4'@2"(5+*?S7C J?7528?I453@$F9R)&R-"Q53@G K2B582C J8S7K I$]R<D+%(#%S G7I?Q C352Q K3Q C I$D?U b0^<A!引言在我国交通事业逐渐兴起的背景下&人们对汽车的功能需求逐渐提高&如何促进自动泊车系统的高效发展&促进其向智能化方向进行推进&变得尤为重要(%)%一方面&由于我国基础设施建设水平与汽车数量增长速度之间不匹配&汽车数量的爆炸性增长使得公路'街道'停车场变得拥挤不堪$另一方面&越来越多的新手司机上路&加剧了这一状况&增加了交通事故发生的概率(")%复杂的停车环境和狭小的停车泊位&为新手驾驶员的安全停车带来了困扰&增加了停车过程中的风险&而自动泊车系统在汽车中的实际应用很好地解决了这一难题($)%自动泊车系统是一种通过探测车辆周围环境信息来找到合适的泊车位&从而控制车辆的转向'速度&使得车辆能够自主驶入泊车位的系统%相比于人工泊车事故率高'传统倒车雷达智能度低&自动泊车系统提高了车辆的智能化水平和安全性&进一步降低了新手司机驾驶车辆的难度&也为将来实现车辆的自动驾驶打下基础(*)%国外汽车行业发展早&技术成熟&对自动泊车的研究开展的较早(-)%R?5等人(()提出了一种在狭窄垂直停车位中停车的路径规划方法&根据环境感知空间和停车位大小%F B??U?3等人(')使用灰度图像识别停车位&通过实时监控停!投稿网址 T T T!1Q12G M4W!2C JCopyright©博看网. All Rights Reserved.!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#"#*!#车位是否可用从而引导司机将车停入车位%E C 3@U C 等人())提出了一种基于轨迹规划的自动泊车方案&对车辆的力学模型进行分析&建立车辆转向模型和泊车模型%:K 7I C P 等人(&)为实现对车辆转向的快速控制&提出了两种饱和控制&能够实现在不同大小的车位泊车操作%许多外国车企&如大众'福特和别克等多种车型都纷纷搭配了自动泊车系统&且技术愈发成熟(%#)%在国内&朱鹏飞等人(%%)提出了一种基于多传感器融合的自动泊车框架&运用:I K F 2?3和Y ?7G ?U 3F 5J S G 534联合仿真&对建立的虚拟场景进行车位检测从而实现自动泊车%邢玲玲等人(%")通过程序控制硬件模块对周围环境信息的采集'计算&模拟出泊车路线&最终实现了自动泊车控制系统%叶林铨等人(%$)结合了车辆运动学和避障的约束&建立最优控制模型&采用了伪谱法来解决泊车过程中时间最优的控制问题%李红等人(%*)以汽车的运动学模型为基础&研究了自动泊车的自适应控制&提出以实时坐标作为车身航向角补偿的目标%在Y ?7G ?U 下进行了仿真实验&证明了其可行性%学者对自动泊车系统的设计展开了较多研究&但大多数研究都基于仿真实验&且与实际车辆泊车过程存在一定偏差&因此本文设计了一种基于单片机与D ?U b 0^<的自动泊车系统%采用与实际车辆运动规律类似的汽车模型作为研究对象&利用超声波传感器以及霍尔编码器测量泊车区域大小信息&依据车辆大小以及车辆运动规模搜索符合泊车条件的车位&通过预先设定的程序指令控制车辆自动泊车入位&并将车辆状态信息通过<0\0传输至上位机&通过上位机界面对泊车过程进行实时显示&确保车辆在安全的前提下完成整个自动泊车过程%B !自动泊车系统方案自动泊车系统结构如图%所示%系统由两大部分组成&即下位机!汽车模型"部分和上位机!:R 机"部分&两部分之间采用<0\0进行无线通信%下位机部分主要包括一些控制模块如电机驱动模块'舵机驱动模块&同时还包括数据采集模块如超声波测距模块'红外避障模块以及测速模块%此外还包括与上位机之间进行数据传输的无线<0\0通信模块%上位机部分主要包括:R 机&通过D ?U b 0^<对下位机传输过来的数据进行处理计算从而实现车位轮廓显示'倒车轨迹绘制'障碍物报警以及车速实时显示功能%图%!自动泊车系统结构框图C !系统硬件结构设计C D B !硬件总体方案设计本系统所采用的四轮汽车模型如图"所示%通过舵机控制车辆前轮转向&利用直流减速电机提供后轮驱动&同时电机自带霍尔编码器&可以用来测量车辆行驶距离以及车速%车辆侧面安装的超声波传感器用来测量车辆与侧方障碍物之间的距离&红外传感器用来避免车辆与前后方物体发生碰撞&无线<0\0模块用来发送或接收数据%图"!汽车模型C D C !硬件电路设计"["[%!硬件选型及总体电路设计本系统采用F 9R )&R -"单片机(%-)作为汽车模型的主控芯片&其具有性价比高'体积小'控制能力强'低功耗以及易扩展等优点%超声波传感器采用]R <D +%(#%&其测量周期为-#J Q &相较于E R +F ]#*更短&同时对于棉质及不规则物体的测量精度也优于E R +F ]#*(%()%由于超声波传感器在测距的过程中需要关闭单片机中的系统中断&以减小测量结果与实际距离之间的误差%而在利用霍尔编码器测量车辆行驶距离时&需要利用单片机的外部中断&若关闭中断&则会丢失关闭中断期间霍尔编码器所产生的脉冲信号&从而导致测量结果产生较大误差&进而影响到自动泊车过程%针对该问题&本系统所采用的解决方案为*使用第二个单片机作为从单片机&专门测量霍尔编码器所产生的外部中断信号&并将数据通过%'根信号线发送至主单片机%电机选择-"#编码器直流减速电机&其具有寿命长&动力强劲&力矩大等优点(%')%同时电机自带;Z 双向霍尔编码器&电机每转动一圈&编码器输出$&#个脉冲&方便测量车速与车辆行驶距离%舵机所采用的型号为Y >&&-&其工作扭矩为%$4@32J &最大转动角度为%)#j &可以实现汽车前轮的转向%无线<0\0通信模块采用^F :)"((&其具有串口透传功能&传输可靠性好&最大传输速率为*(#)##U 8Q %红外检测模块通过红外线的发射与接收来检测障碍物&其测量距离为"!$#2J &可通过电位器旋钮进行调节%系统总体硬件电路设计如图$所示%"["["!电机驱动模块电路设计本系统所采用的电机为-"#编码器减速电机&其额定电压为%"b &因此电源使用%"b 充电电池组&电机驱动模!投稿网址 T T T!1Q 12G M4W !2C J Copyright ©博看网. All Rights Reserved.第%"期袁子阳&等*基于单片机与D ?U b 0^<""""""""""""""""""""""""""""""""""""""""""""""""""""的自动泊车系统设计与实现#"#-!#图$!系统总体硬件电路图块采用D "&)=&其接口说明如表%所示%表%!D "&)=电机驱动模块接口说明输出;3Z 通道;3Z 输出&连接电机%"b 供电主电源正极输入供电>=.主电源负极输入-b 输出-b 电压输出端&可给Y R O 供电^=;3^=Z 通道;3Z 使能0=%!0=*逻辑输入0=%!0="控制通道;&逻辑输入0=$!0=*控制通道Z若使用该模块分别控制两个电机&则需要单独调速以使它们的转速相同&因此本系统将两个电机并联&以使它们的电压相同&进而转速相同&使用D "&)=的一对输出来控制两个电机%D "&)=控制直流电机状态如表"所示%表"!D "&)=控制电机状态表^=;0=%0="直流电机状态#m m 停止%##制动%#%正转%%#反转%%%制动"["[$!舵机驱动模块电路设计本系统所采用的舵机型号为Y >&&-&其工作电压为$[#!'[#b &工作电流为"##J ;&而单片机输出电流为几十毫安&无法驱动舵机&解决方案是使用一个降压模块给舵机单独供电%此外&由于舵机的控制需要"#J Q 的周期信号(%))&且转动角度随高电平占空比的变化而变化&即需要使用单片机中的定时器中断来控制%而当超声波测距时又需要关闭系统中断&以提高测量精度%解决方案是通过一个继电器来控制舵机的电源&当需要控制舵机转动时&首先打开继电器&然后再控制舵机&否则关闭继电器%-b 继电器模块接口说明如表$所示%表$!-b 继电器模块接口说明b R R 接电源正极>=.接电源负极0=触发端!低电平触发有效"常开端!=/"继电器没有吸合时&与公共端断开&吸合时与公共端接通公共端!R /Y "继电器的公共端常闭端!=R "继电器没有吸合时&与公共端接通&吸合时与公共端断开Y >&&-舵机的控制需要一个"#J Q 的周期信号&其中高电平范围为#[-!"[-J Q &总间隔为"J Q %在这"#J Q 内&高电平的占空比决定了舵机转动的角度%在"#J Q 内&若高电平为%[-J Q &舵机将向&#j 的方向转动!通常称为中立位置&对于%)#j 舵机来说&就是&#j 位置"$若高电平小于%[-J Q &舵机将向#j 方向转动$若高电平大于%[-J Q &舵机将向%)#j方向转动%!投稿网址 T T T!1Q 12G M4W !2C J Copyright ©博看网. All Rights Reserved.!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#"#(!#E !系统软件结构设计E D B !软件总体设计系统软件总体流程如图*所示&首先单片机上电后系统初始化%初始化完成之后电脑端连接系统中<0\0模块所发出的<0\0信号&连接成功之后运行上位机程序&与下位机建立连接%当上位机向下位机发送自动泊车命令后&车辆开始执行自动泊车过程&同时每隔一段时间发送车速数据至上位机进行显示%自动泊车过程开始时首先需要搜索合适的停车区域即车位&当搜索到合适的车位之后&系统开始控制车辆自动泊车入位&与此同时发送车位大小数据!长和宽"并每隔一段时间发送车辆相对车位的位置数据&上位机通过计算实时绘制车辆运动轨迹%在自动泊车过程中若车辆前后方有障碍物距离过近&则车辆停止并将提示信息发送至上位机&待障碍物消失后继续完成自动泊车过程%图*!系统软件总体流程图E D C !数据采集$["[%!超声波传感器测距超声波测距的原理是利用超声波在空气中的传播速度为已知&测量声波在发射后遇到障碍物反射回来的时间&根据发射和接收的时间差计算出发射点到障碍物的实际距离(%&)%]R <D +%(#%超声波传感器工作原理如下*%"给引脚9I 5@输入一个长为%#!"#'Q 的高电平方波$""引脚^2B C 端的电平会由#变为%&此时启动定时器计时$$"当超声波返回被模块接收到时&回波引脚端的电平会由%变为#$此时停止定时器计数&定时器记下的这个时间即为超声波由发射到返回的总时长&结果除以"即超声波单程传播时间$*"根据声音传播速度为$*#J 3Q &即可计算出所测的距离%$["["!车辆行驶距离及车速测量本系统所采用的直流减速电机自带霍尔编码器&电机每转动一圈&编码器输出$&#个脉冲%当需要测量车辆水平位移距离时&主单片机将与从单片机所连接的一根数据线先置为低电平&以便重新开始测量%之后延迟"J Q 作为从单片机反应时间%接着再将数据线置为高电平&再延迟"J Q&此时便可以计算车辆水平位移距离%当从单片机检测到高电平&便将外部中断计数器清零&然后重新开始计数外部中断&车辆位移距离等于外部中断数除以$&#再乘以车轮的周长&从单片机将位移距离值通过)位信号线实时发送至主单片机%E D E !数据发送与接收系统初始化完成并与上位机建立连接之后&主单片机每隔%##J Q 向上位机发送一次数据&包括车速'泊车时车辆状态'搜索的车位大小以及其他相关信息&之后上位机向单片机返回一个字节的数据&具体过程如下*第一步&单片机向上位机发送数据%在单片机通过<0\0向电脑发送数据之前&每次需要发送一条;9指令即*-;9_R 0:F ^=.d #&%"B I B 3.&%"表示一次性发送的字节数&接着再发送真正有用的数据$第二步&上位机接收并处理数据%上位机接收的是字符串&通过D ?U b 0^<中的字符串转无符号字节数组b 0将其转换为数组&并通过数组索引b 0&将每个数据索引出来再进行相应处理$第三步&上位机向单片机发送数据%当上位机接收到单片机发送来的数据并进行相应处理之后&上位机向单片机发送一个字节的数据&不同的值代表了上位机向单片机发送的不同命令$第四步&单片机接收上位机发送来的数据%由于单片机通过<0\0接收到的数据格式为*-_0:.&#&%*#.&其中#代表客户的索引&%代表收到数据的字节数&而冒号后才是收到的有效数据&因此需要对其有效数据进行提取%通过以上*步便完成了单片机!下位机"与上位机之间一次完整的相互通信%E D F !自动泊车过程设计$[*[%!最小泊车区域分析如图-!?"所示&当车辆从;点开始拐弯并倒车&其右后车轮运动轨迹为半径为:的圆的一部分&圆心在后轮车轴延长线上%前轮转弯幅度越大&转弯半径:就越小%当车辆到达Z 点时&运动轨迹为圆的四分之一&此时车身恰好与初始位置车身垂直%最小泊车区域是指满足自动泊车所需的最小区域&只有存在此区域&才能完成自动泊车过程%其大小与车辆大小以及车辆最小转弯半径有关%如图-!U"所示&当汽车从U 处开始进行自动泊车时&图中灰色区域!将其分为F %和F "两个区域"为满足停车条件的最小泊车区域&只有存在大于等于该区域面积且形状类似的区域才能完成自动泊车过程%为方便研究&依据图(定义最小泊车区域相关参数如表*%!投稿网址 T T T!1Q 12G M4W !2C J Copyright ©博看网. All Rights Reserved.第%"期袁子阳&等*基于单片机与D ?U b 0^<""""""""""""""""""""""""""""""""""""""""""""""""""""的自动泊车系统设计与实现#"#'!#图-!?"车辆倒车轨迹图-!U"车辆泊车轨迹图(!最小泊车区域参数分析表*!最小泊车区域相关参数"汽车右侧与车库底部的最小距离S 车库最小宽度!若实际车库宽比S 大&则停车原则为靠左停"O 汽车右侧与车库边缘的最小距离N 汽车后侧与车库左侧应保持的水平距离G 汽车内轮的最小转弯圆周的四分之一E 车位长度B车辆在停入车位后与两侧物体需保持的安全距离最小泊车区域相关参数与汽车本身的属性有关&对于同一辆车&这些参数固定不变%本设计所采用的汽车模型与实际车辆运动规律类似&经过测量&车长R 为"%2J &车宽为^为%)2J &最小转弯半径:为"*2J &安全距离设定B 为-2J &因此其最小泊车区域各参数计算如下!单位*2J "*"+R ,:,B +"%,"*,-+-#S +^,B ,B +%),-,-+")O +:+"*N +:,^,B +"*,%),-+*'G +"H .H :3*+"H $Y %*H "*a *+$'E +R ,B +"%,-+"(以上是理论计算结果&但部分参数与实际情况有所偏差&例如汽车后轮与汽车后边沿还有一定距离&汽车车轮中心与汽车两侧边缘也有一定距离&因此需要通过多次试验对最小泊车区域相关参数进行修正%经过反复实验&最终参数O 修正为%-&参数"修正为*-&参数N 修正为$#%$[*["!泊车区域测量与判断当上位机发送自动泊车命令后&将有关自动泊车的变量进行初始化&随后开始进行自动泊车%首先需要搜索符合条件的停车位%将实际泊车区域分为两个区域F %和F "依次进行测量和判断&当两个区域的大小都满足时&才能进行下一步的倒车入库操作&否则需要重新搜索满足条件的车位%首先测量并判断第一个区域F %&超声波模块安装在车辆右侧&当开始执行自动泊车过程时&车辆开始前进&在单片机中每隔(#J Q 测量一次车辆右侧与右方障碍物的距离%当超声波测量的距离大于"&即汽车右侧与车库底部应保持的最小距离时&表明到达了车位边缘&此时开始记录车辆水平位移&并且实时判断超声波测量距离是否大于"且车辆水平位移小于S %当其中一个值不满足条件时&即超声波测量距离小于"或汽车水平位移大于S &此时判断超声波测量距离是否大于"并且汽车水平位移大于S &即F %区域是否满足要求&若满足要求则进行下一步测量与判断&否则重新测量下一个车位的第一个边缘%当第一个区域F %满足时&同理&进行下一个区域F "的测量与判断%此时实时判断超声波测量距离是否大于O 并且车辆水平位移小于N &当其中一个值超出设定值时&即当超声波测量距离小于O 或汽车水平位移大于N &此时判断超声波测量距离是否大于O 并且汽车水平位移大于N &若成立&则表明区域F "满足要求&此时便完成了车库测量与判断&并且车辆已行驶到设定位置并准备下一步的倒车入库%否则重新开始测量并判断区域F %与F "&其流程如图'所示%图'!泊车区域测量与判断$[*[$!泊车入位当搜索到符合条件的停车区域时&车辆已行驶到指定位!投稿网址 T T T!1Q 12G M4W !2C J Copyright ©博看网. All Rights Reserved.!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#"#)!#置&接下来便执行泊车入位%首先打开继电器&然后前轮转动相应角度&开始倒车%与此同时开始记录车辆右后轮转弯弧长%当其长度为G 时停车&接着前轮回正并开始向后倒车&倒车距离为E X B %至此&便完成了自动泊车过程%$[*[*!障碍物检测与响应车辆前后方的障碍物通过红外避障模块来检测&该模块测量速度快&测量结果实时性高&可以有效避免车辆与周围物体发生碰撞%当车辆前进时&若前方有障碍物过近时&车辆会自动停止&直到障碍物消失后继续完成自动泊车%同理&当车辆倒车时&若后方有障碍物过近时&车辆也会自动停止&直到障碍物消失后继续完成自动泊车%系统每"#J Q 检测一次车辆前后方的障碍物信息%E D G !车位及车辆倒车轨迹显示在搜索到满足最小泊车区域的停车位后&主单片机向电脑发送车位大小以及车辆与车位的距离&包括车位长和宽以及车辆与车位的水平距离与垂直距离%接着通过D ?U +b 0^<("#)图形控件显示车位与车辆&其效果如图)!?"所示%图)!?"中&矩形左上角为坐标起点!#&#"&向下为)轴正方向&向右为&轴正方向%设U 点的坐标为!&#&)#"&则@J A G D 五个点的绝对坐标计算如下!其中@J d N 6S _R 3""*@*!R 3"&)#6O "J *!R 3"_@J &)#6O "A *!R 3"_@J &)#6O 6E "G *!R 3"_@J _S &)#6O 6E "D *!R 3"_@J _S &)#6O "F *!R 3"_@J _S _@J &)#6O "完成车位显示接下来是车辆倒车过程的实时动态显示&其在D ?U b 0^<中的显示效果如图)!U"所示%通过图&车辆坐标计算示意图对0*9P 四个点的坐标进行分析计算%图)!车辆位置显示示意图图&!车辆坐标计算示意图在图&中&设U 点坐标为!&#&)#"&则*d (p !"m $[%*m :"m $(#&(为汽车右后轮转弯弧长&通过单片机实时发送给上位机&0*9P 四个点的&轴和)轴绝对坐标计算如下*0&+&#,:H Q53!*"-R H 2C Q !*"0)+)#-:,:H 2C Q !*",R H Q 53!*"*&+0&,^H Q 53!*"*)+0),^H 2C Q !*"9&+*&,R H 2C Q !*"9)+*)-R H Q 53!*"P &+9&-^H Q 53!*"P )+9)-^H 2C Q !*"将以上公式通过D ?U b 0^<进行编程&从而实现车辆位置坐标的实时计算&D ?U b 0^<车辆位置坐标计算程序如图%#所示%图%#!D ?U b 0^<车辆位置坐标计算程序在D ?U b 0^<中绘制车辆的同时还需要绘制车辆倒车轨迹&其效果如图%%!?"所示%图%%!?"中"%和""的绘制方式如下*图%%!倒车轨迹显示示意图根据D ?U b 0^<中绘制弧b 0的使用方法&对于"%的显示&需要计算图%%!U"中@点横坐标'J 点纵坐标'A 点横坐标以及G 点纵坐标%设G 点坐标为!&#&)#"&则@点横坐标为!:"&J 点纵坐标为!)#6"m :"&A 点横坐标为!&#_:"&G 点纵坐标为)#&且弧"%的起始角为&#j &大小为&#j &根据以上信息便可绘制出指定圆弧&同时还可以设置线条的颜色和类型等%弧""的绘制方法与"%相同&此处不再叙述%图%"为D ?U b 0^<总程序%F !实验结果按照系统硬件电路图对实物进行连接并调试&其目的是排除在接线的过程中可能发生的各种错误&确保硬件连接正确&确保每个接口都是正确可靠的("%)%接着与上位机进行联合测试&确保数据发送和接收正常并同步%系统硬!投稿网址 T T T!1Q 12G M4W !2C J Copyright ©博看网. All Rights Reserved.。
基于LABVIEW的车牌识别停车系统设计
第26页/共27页
感谢您的观看!
第27页/共27页
由于LABVIEW的后续图像处理区域随图像大小的改变而改变,所以要将大小归一化
第5页/共27页
4.2车牌区域初步定位
第6页/共27页
4.2车牌区域初步定位
颜色阀值
第7页/共27页
颜色阀值
第8页/共27页
高级形态学处理
第9页/共27页
简单形态学中值处理
第10页/共27页
滤波器
第11页/共27页
1、LABVIEW是图形化编程,可视化程度非常高,对编程基础要求低。2、LABVIEW提供专门的视觉助手(NI VISION ASSITANT),开发人员无需编程,即能快速完成视觉应用系统的模型建立直接设置相关参数。
第4页/共27页
4.1 车牌识别过程—读取、并自定义大小
本设计统一定义为1024*768大小
车牌原理概述车牌识别设计方案车牌识别识别过程停车场管理系统展望
第1页/共27页
1、设计的原理
硬件部分包括系统触发、图像采集,软件部分包括图像预处理、车牌位置提取、字符分割、字符识别四大部分
第2页/共27页
2、设计方案:不切为单个字符为特色
第3页/共27页
3、为什么使用LABVIEW来开发
测量XY坐标
第12页/共27页
初步定位效果图
第13页/共27页
车牌大小归一化
第14页/共27页
车牌大小归一化
第15页/共27页
剪切掉车牌边框,特别是螺母,方便后续识别
基于车牌识别的智能停车场管理系统设计与实现

基于车牌识别的智能停车场管理系统设计与实现智能停车场管理系统是近年来快速发展的一项技术,基于车牌识别的智能停车场管理系统在提高停车场管理效率、提升用户体验等方面具有广泛的应用前景。
本文将介绍基于车牌识别的智能停车场管理系统的设计与实现。
一、系统设计概述基于车牌识别的智能停车场管理系统,主要包含车辆入场管理、车辆出场管理和数据统计报表三个模块。
系统设计需要充分考虑系统的稳定性、准确性和实时性,同时提供友好的用户界面和便捷的操作流程。
1. 车辆入场管理模块车辆入场管理模块是系统的核心功能之一。
该模块通过车辆进入停车场时的车牌识别技术,实现车辆识别、入场记录生成和费用计算等功能。
具体设计包括以下几个步骤:(1)车牌识别:利用图像处理和模式识别算法,对车辆进入停车场时的车牌进行识别,确保识别的准确性和效率。
(2)入场记录生成:识别成功后,系统自动生成车辆的入场记录,包括车辆信息、入场时间等,并将其存储在数据库中以便后续查询。
(3)费用计算:根据停车场的计费规则,系统自动计算车辆的停车费用,并显示在入场界面或发送至用户手机等方式通知用户。
2. 车辆出场管理模块车辆出场管理模块是系统的另一个核心功能。
该模块通过车牌识别技术,实现车辆出场验证、出场记录生成和费用结算等功能。
具体设计包括以下几个步骤:(1)车牌识别:利用图像处理和模式识别算法,对车辆离开停车场时的车牌进行识别,确保识别的准确性和效率。
(2)出场验证:系统根据入场记录与出场记录进行验证,确保只有入场记录存在且未结算的车辆才能出场。
(3)出场记录生成:识别成功后,系统自动生成车辆的出场记录,包括车辆信息、入场时间、出场时间等,并将其存储在数据库中以便后续查询。
(4)费用结算:根据车辆的停车时长和计费规则,系统自动计算车辆的停车费用,并结算完成后生成结算凭证。
3. 数据统计报表模块数据统计报表模块是系统的辅助功能,通过对停车场数据进行统计和分析,生成各种数据报表以供管理者参考。
219388549_基于LabVIEW_和Vision_Assistant_的车牌识别系统设计

第7期2023年4月无线互联科技Wireless Internet TechnologyNo.7April,2023基金项目:2022年科研平台(江苏省商业智能应用工程技术研究开发中心)专项;项目名称:基于LabVIEW 和Vision Assistant 的车牌识别技术研究;项目编号:KJXJ22558㊂作者简介:许卫洪(1980 ),女,江苏常熟人,讲师,硕士;研究方向:电气自动化技术应用㊂基于LabVIEW 和Vision Assistant 的车牌识别系统设计许卫洪(无锡商业职业技术学院物联网与人工智能学院,江苏无锡214153)摘要:文章提出了一种基于LabVIEW 和Vision Assistant 的车牌识别方案㊂系统使用Vision Assistant 的颜色阈值㊁高级形态学及光学字符识别等函数,实现了对车牌图像的预处理和车牌区域定位以及车牌字符分割㊁字符训练和识别,使用LabVIEW 程序完成车牌的显示㊂使用数百张车牌图像对该系统进行验证,结果证实该方案是可行的,系统是可靠的,可以快速㊁准确定位和识别车牌㊂关键词:车牌识别;视觉助手;车牌定位;字符分割与识别中图分类号:TP391.41㊀㊀文献标志码:A0㊀引言㊀㊀随着我国经济的快速发展和汽车工业水平的不断提升,汽车的生产成本也大大降低㊂这两方面因素都刺激着我国汽车行业的快速发展以及汽车保有量的急速增长[1]㊂要对如此之多的车辆进行有效的管理,必须进行车辆身份的识别㊂车牌是车辆最明显且唯一的身份证㊂因此,设计一款高效的车牌识别系统有很高的应用价值㊂我国的车牌按照目的和用途分为小型汽车号牌㊁大型汽车号牌㊁新能源汽车号牌及其他类型共27类㊂本文针对已经采集到的蓝底小型汽车号牌图像,提出了一种基于LabVIEW 和Vision Assistant 的车牌识别方案㊂1㊀系统整体结构和软件选择㊀㊀车牌的识别过程主要包括获取车牌图像㊁图像预处理㊁车牌区域定位㊁车牌字符分割㊁车牌字符识别㊁车牌显示等,如图1所示[2]㊂图1㊀车牌识别过程车牌识别系统常用的开发软件包括OpenCV,Matlab,VC,LabVIEW 等[3],本系统选择采用LabVIEW,主要有3个原因:(1)LabVIEW 编程软件可以把计算机作为处理器,因而可以应用计算机强大的处理和存储功能,使采集的车牌图像可以存储在计算机中㊂(2)LabVIEW 属于图形化编程语言,编程效率高,内含多种函数,尤其是视觉与运动模块含有400多个可供直接调用的函数㊂(3)视觉助手VisionAssistant 功能强大,可以实现算法合理性和可靠性的快速验证,可以实现将编写完的程序转化为LabVIEW 的VI 程序,方便LabVIEW 调用㊂2㊀系统的设计与实现2.1㊀获取车牌图像㊀㊀因蓝底小型汽车号牌图像已经完成采集并存储到电脑中,系统在获取车牌图像时只需通过程序将图像读入即可,对应的程序框如图2所示㊂通过使用LabVIEW 中的创建图像IMAQ Creat㊁获取文件信息IMAQGetFileInfo 和读取文件IMAQ ReadFile 这3个函数,只需输入图像保存的文件路径,系统就可以读取车牌图像㊂图2㊀读取车牌图像程序2.2㊀车牌预处理与车牌定位㊀㊀由于读入的不同车牌图像的像素和大小很可能不一致,且在车牌图像中定位车牌时不需要对整个图像进行处理,因此系统只需要在读取的车牌图像中确定一个区域去进行分析即可㊂这个需要确定的区域即为兴趣区域ROI(Region of Interest)㊂在确定兴趣区域时,系统必须确保图像中的车牌号部位在该区域内㊂为实现此目的,系统需利用LabVIEW 的获取图像信息IMAQ GetImageInfo 函数来获得每个车牌图像信息,根据该信息确定ROI㊂确定ROI 后,系统还需利用视觉助手Vision Assistant 来完成车牌号码区域的定位,即系统通过使用Vision Assistant 的阈值化函数将图像中的高亮度区域和其他区域予以区分,使高亮度区域阈值化后的像素值为1,其他区域阈值化后的像素值为0,高亮度区域即为车牌号码的位置㊂为实现阈值化,本系统中采用了颜色阈值Color Threshold 函数,以使彩色图像转换成二值图像㊂颜色阈值函数能将彩色图像在4个颜色平面(RGB㊁HSL㊁HSV 和HSI)上应用阈值并且放置结果到一幅8位的图像中,实际上是1位的二值图像,图像中的值只有0和1㊂为了更好地获取车牌定位,系统需利用3种不同的颜色模型进行二值化㊂除了最为常见的RGB(红绿蓝)颜色模型[4],HSL(色调㊁饱和度㊁亮度)颜色模型是应用比较多的另一种颜色模型,该模型色调(色相)平面抽取的是彩色图像的色调[5]㊂另外,HSV 颜色模型(也称HSB 颜色模型)与HSL 颜色模型相近,区别在于HSV 颜色模型将HSL 的亮度平面换成了Value 值平面㊂HSI 颜色模型与HSL㊁HSV 颜色模型类似,区别在于HSI 颜色模型是Intensity 强度平面㊂本系统中,Vision Assistant 中的Color Threshold1函数利用了HSL 颜色模型,Color Threshold2函数利用了HSI 颜色模型,Color Threshold3函数利用了RGB 颜色模型㊂二值化后,系统再使用高级形态学Adv.Morphology 函数,获取车牌号码位置的图像㊂高级形态学函数通常是有条件的组合基本变换,如二值的腐蚀㊁膨胀㊁开闭运算㊁删除小目标㊁删除大目标㊁删除边界目标㊁填充孔洞㊁凸包㊁骨架㊁分割目标等㊂使用高级形态学操作可以填充粒子㊁去除接触边界的粒子㊁去除不必要的小的或大的粒子㊁分离接触的粒子㊁查找凸包的粒子,可以使用这些变换来准备粒子以用于定量分析㊁观察几何区域㊁提取最简单形式的建模㊁识别目标等㊂本系统使用颜色阈值Color Threshold 函数和高级形态学Adv.Morphology 函数的不同组合配合使用,对每一车牌均获取3个图像,如图3所示㊂Adv.Morphology1函数和Adv.Morphology2函数均采用凸包函数,可以计算每个粒子的凸出包络,可以有效地关闭粒子,以便于粒子测量,甚至当粒子轮廓不连续时也可以通过凸包后进行测量㊂当然,凸包函数也可以填充孔洞㊂图3㊀颜色阈值函数和高级形态学函数的配合使用Adv.Morphology3和Adv.Morphology4函数分别为凸包函数和删除小目标函数㊂删除小目标Remove small objects 函数,其作用就是将图像中的小的目标删除掉,使图像更简洁㊂小的目标的宝岛是通过腐蚀次数Iterations 来定义的,定义的腐蚀次数越大,则过滤删除的小目标面积也就越大㊂腐蚀次数Iterations 控制的是使用3ˑ3的掩模进行腐蚀的次数㊂通过增加腐蚀次数,函数可以删除更大的粒子㊂Adv.Morphology5和Adv.Morphology6函数分别为凸包函数和删除小目标函数㊂完成以上任务后,系统再运用运算函数Operators,将前面获得的3幅图像进行Add 运算,以使3幅图像合并为1幅图像,确保后续能提取到完整的车牌号码部分㊂为了获得较好的车牌图像,系统还需要对合并后的图像进行进一步处理㊂该过程主要分3个步骤进行㊂(1)使用2个高级形态学Adv.Morphology 函数,均为Remove Small Objects 删除小目标函数,把合并后的图像中的细小目标移除掉㊂(2)使用基本形态学Basic Morphology 函数再次二值化㊂基本形态学函数包括腐蚀目标Erode objects㊁膨胀目标Dilate objects㊁开目标Open objects㊁闭目标Close objects㊁Open㊁适当闭Proper Close㊁Gradient In 梯度内㊁Gradient Out 梯度外㊁Auto Median 自动中值㊁Thick 粗化㊁Thin 细化等㊂本系统采用了其中的Auto Median 自动中值函数,通过该函数联合使用开操作和闭操作㊂若I 是原始图像,则Auto Median 自动中值函数提取原始图像的适当开和适当闭的交集[6]㊂Auto Median(I)=AND(OCO(I),COC(I))或者Auto Median (I )=AND (DEEDDE (I ),EDDEED(I))其中I 是原始图像,E 是腐蚀,D 是膨胀,O 是开,C 是闭㊂(3)运用粒子过滤函数Particle Filter,过滤或保留图像中满足过滤条件中指定的粒子㊂因粒子过滤函数Particle Filter 是基于粒子测量函数Particle Measurements 的,因此进行粒子过滤时,系统必须先使用粒子测量函数Particle Measurements 测量出所有的粒子及其相差的数据(如面积㊁质心坐标㊁质心方向等),再根据用户指定的过滤条件,将满足条件的粒子过滤掉或者保留下来㊂粒子过滤函数Particle Filter 运行后,可以显示原始图像和现有图像的比对,如图4(a)和(b)所示㊂由图可见,车牌号码部分已经从读取的图像中分离出来了,车牌号码部分的图像显示为红色,其余部分为黑色,但车牌存在倾斜的角度,会影响后续对车牌的分割和识别㊂本系统使用高级直边函数Adv.Straight Edge 和卡尺函数Caliper 来测量该倾斜角度,并使用最大卡尺函数Max Clamp 分别测量水平和垂直方向的两条边之间的最大距离㊂完成以上步骤后,在LabVIEW 程序中,系统利用视觉助手中测得的车牌倾斜角度及水平与垂直的方向两条边的最大距离信息,使用IMAQ Convert Rectangle to ROI,IMAQ Extract Tetragon,IMAQ Rotate 函数,完成车牌的准确定位,如图4(c)所示㊂图4㊀车牌图片对比2.3㊀字符分割与识别㊀㊀从背景图像中分离每个字符或者说定位字符的过程通常称为字符分割㊂本系统利用视觉助手的光学字符识别OCR函数(Optical Character Recognition)来完成字符分割与字符的识别,最终从图像中读取字符与文本㊂该函数的使用需要区分训练和读取/验证字符两个阶段㊂2.3.1㊀OCR函数的训练㊀㊀OCR函数的训练过程如下:采集图像ң指定ROI ң从背景图像中分离每个字符ң提取每个字符的特征信息ң为每个分段的字符指定一个字符值ң每个字符类分配一个参考字符(可选)ң保存字符集为字符集文件㊂在训练字符前,系统必须设置OCR的参数,分割想要训练的字符㊂阈值(Thresholding)是分割过程中最重要的概念之一㊂基于像素的强度值,阈值可以将图像中的像素分割为前景和背景㊂OCR函数包含1个手动和3个自动计算阈值范围的方法:Uniform均衡㊁Linear线性㊁Non Linear非线性㊂本系统采用了均衡的方法,是一种通过OCR计算单一阈值的方法,并且使用得到的该阈值以部分到整体的方式从ROI中提取像素㊂分割字符的方法有两种,即自动分割和根据字符的大小进行分割㊂本系统选择根据字符的大小进行分割的方法㊂在分割的时候,需选择Size和Spacing 选项,设置Bounding Rect Width边界矩形宽度㊁Bounding Rect Height边界矩形高度㊁Character Size字符尺寸㊁Min Char Spacing最小字符间距㊁Max Element Spacing(X)最大元素间距(X方向)㊁Max Element Spacing(Y)最大元素间距(Y方向)㊁Min Space Distance最小字符间距等参数㊂㊀㊀对分割出来的字符,还需进行字符集的训练㊂这种训练方式方便且直观㊂训练字符的方式有3种: (1)练所有字符(Train All Character)不管ROI中的字符是否已经被识别,全部重新训练㊂(2)训练错误的字符(Train Incorrect Character)只训练ROI中未识别到的字符,已经识别到的字符则不训练㊂(3)训练单一的字符(Train Single Character)可以有针对性地对ROI中的某一个字符进行单独训练㊂系统将训练的结果以∗.abc的形式保存不同字符的特征向量㊂2.3.2㊀OCR函数的读取/验证㊀㊀OCR函数的读取/验证过程如下:打开OCR函数ң加载字符集文件ң采集图像ң指定ROIң从背景图像中分离每个字符ң与特征集比较特征ң返回识别的字符ң校验识别的字符㊂3 结语㊀㊀本文提出了基于LabVIEW和Vision Assistant的车牌识别方案㊂使用数百张车牌图像进行验证,系统能够对车牌进行有效的识别和显示,证实该方案是可行的,系统是可靠的,可以实现快速㊁准确定位和识别车牌的目标㊂参考文献[1]张孟军.基于LabVIEW的车牌识别系统研究[D].南宁:广西大学,2016.[2]朱克佳,郝庆华,李世勇,等.车牌识别综述[J].现代信息科技,2018(5):4-6.[3]覃传妹.基于LabVIEW的车牌识别小区智能门禁系统[D].南宁:广西大学,2019.[4]张杨梅.倒谱域彩色图像水印算法研究[D].西安:西安科技大学,2008.[5]章星晨,孙刘杰.基于Shearlet变换的Retinex去雾算法[J].计算机技术与发展,2019(1):40-46. [6]李德尧,李和平.基于LabVIEWVDM的锁螺丝机器人控制系统设计[J].机床与液压,2018(23): 61-64.(编辑㊀王永超)Design of license plate recognition system based on LabVIEW and Vision AssistantXu WeihongSchool of Internet of Things and Artificial Intelligence Wuxi College of Commerce and TechnologyWuxi214153 ChinaAbstract This paper presents a license plate recognition scheme based on LabVIEW and Vision Assistant.By using the functions of Vision Assistant such as color threshold advanced morphology and optical character recognition the system realizes the pre-processing of license plate image license plate area positioning license plate character segmentation character training and recognition and then uses the LabVIEW program to complete the license plate display.Hundreds of license plate images were used to verify the system.The results show that the scheme is feasible and the system is reliable which can quickly and accurately locate and recognize license plates.Key words license plate recognition Visual Assistant license plate location character segmentation and recognition。
基于机器视觉的智能车库引导系统设计
基于机器视觉的智能车库引导系统设计摘要:随着时代的发展,人们逐渐进入智能化时代,随着机动车数量的快速增加,现代社会对停车场管理的要求也越来越高。
为了方便停车场的管理,设计了基于LabVIEW和单片机的停车场收费系统,首先利用机器视觉进行车牌识别,然后通过单片机处理相关信息将车辆引导至空余的车位,使停车具有较高的安全性高、便捷性和可扩展性强的特点,适用于地下停车场和停车楼的控制与管理。
关键词:LabVIEW;单片机;车牌识别;车辆引导1 基于LabVIEW识别提取车牌信息1.1LabVIEW编程理论基于LabVIEW的智能车库引导系统的第一步通过LabVIEW车牌识别,而车牌识别的图像是通过照相机进行拍摄的,照相机对于来往车辆进行拍摄,OCRTrainingInterface对字符进行训练,训练中经过阈值分割、指定感兴趣区域、调节字符间距,完成对单个字符的分割。
并通过对字符的编辑,制作完成字符集,然后用OCR函数创建的机器视觉程序来读取字符,从而完成对车牌信息的识别[1]。
其识别提取的流程如图1所示。
图1 车辆识别流程图1.2程序演示Step1:插好相机,链接好单片机,打开路径:OCRTEST文件夹下,找到MyTest.exe,双击打开。
图2 操作面板Step2 :选择debug模式还是MCU[2]模式,如果是MCU模式,还会跳出如下选择对话框,选择MCU链接COM口,程式自动发送help给MCU,如果超过20s 没有收到MCU返回的ok,程序就停止。
DEBUG模式无需连接MCU,所以不用选择MCU COM[3]。
Step3:MCU连接上以后跳出选择CCD COM对话框,选择所连接的ccd.(会有20秒的选择时间,超时停止)STEP4:待CCD和MCU都连上之后,CCD和MCU显示灯会亮绿色,如下图。
在原图显示框框选需要检测的区域(下图只是演示,实际上一次只会拍摄到一个车牌),点击start ,如果是MCU模式,程式就会一直等待MCU的拍照信号(MCU要检测时会发送paizhao/r/n。
基于labview的车牌识别停车系统设计
本科毕业(设计)论文题目基于LABVIEW的车牌识别停车系统设计学院机械工程学院专业测控技术与仪器学生姓名学号年级2012指导教师职称2016年4 月25 日基于LABVIEW的车牌识别停车系统设计摘要:随着停车场的管理系统对网络化、智能化要求越来越高,传统的基于I C卡技术的停车场管理系统已经不再满足要求了。
在此背景下,本文提出一种基于LABVIEW的车牌识别停车系统的设计方案。
本系统基于NI VISION视觉开发模块进行车牌识别算法设计,车牌识别算法主要由图像预处理、车牌区域的定位、车牌的识别三大部分组成。
对需要识别的图像的具体处理过程分为:读取、大小归一化、车牌倾斜校正、车牌区域初步定位并剪切提取、大小再归一化、剪切去掉提取出的车牌边框、二值化、OCR训练、OCR识别9个步骤。
车牌区域的定位是实现车牌识别算法的最关键步骤,本设计主要采用HSL模式下颜色阈值及形态学处理来实现的。
车牌识别算法采用的是模板匹配法,是通过LABVIEW的视觉助手的OCR功能实现的。
在此进出上进一步设计停车管理系统,主要使用LABSQL,并配合SQL指令来进行开发的。
实现了车辆进出门禁的自动识别、登记、计费。
其中对零时停车按时计费,对包月车辆不收费。
对150个实际采集样本测试,车牌区域定位成功140个,完全识别出125个车牌,测试识别率为83.3%。
关键词:LABVIEW 车牌识别停车场管理视觉助手LABSQLLicense plate recognition and Parking management systembased on graphics designSpecialty:The measurement and control technology and instrumentStudent Number:201210114112Student:Zeng Xingyu Supervisor:Cheng YueAbstract:As the parking lot management system of network, the software demand is higher and higher, the traditional parking lot management system based on the technology of I C card is no longer meet the requirements.In this background, this paper proposes a design scheme of license plate recognition system based on LABVIEW The design of parking management system is mainly used LABSQL, and cooperate with the development of SQL commands.The vehicle in and out of the door can be automatically identification, registration, billing.Monthly vehicle for temporary parking pricing, on time in case of no charge.This system based on NI VISION development module for license plate recognition algorithm design VISION, license plate recognition algorithm is mainly composed of the positioning of the image preprocessing, license plate area, the license plate recognition of three parts.The images of the need to identify the specific process is divided into: read, size normalization, license plate tilt correction, preliminary localization and shear plate region extraction, size normalization, shear off again to extract the license plate frame, binarization, OCR training, OCR nine steps.Locate license plate area is the most key step of license plate recognition algorithm, this design mainly adopts an HSL color mode threshold and morphological processing.License plate recognition algorithm is used in the template matching method, is through the implementation of the LABVIEW visual aide OCR function.In and out on the further design of parking management system, the main use LABSQL, and cooperate with the development of SQL commands.The vehicle in and out of the door can be automatically identification, registration, billing.Monthly vehicle for temporary parking pricing, on time in case of no charge.To test 150 samples, the license plate localization success 148, totally identified 125 plates, test the recognition rate is 83.3%. Keywords:Vehicle license plate recognition Management of parking lot Vision Assistant LBSQL目录第1章绪论 (1)1.1 研究背景及意义 (1)1.2 涉及热门研究领域现状 (1)1.2.1 车牌识别研究现状 (1)1.2.2 机器视觉研究现状 (2)1.3 主要研究内容 (2)第2章系统总体设计 (3)2.1 车牌识别原理概述 (3)2.2 设计方案 (4)2.2.1 开发平台选择 (4)2.2.2 车牌识别设计方案 (5)2.3 相关软件简介 (6)2.3.1 LABVIEW简介 (6)2.3.2 NI视觉开发模块简介 (7)第3章车牌识别程序设计 (8)3.1 图像读取与简单预处理 (8)3.2 车牌区域定位剪切 (8)3.2.1 车牌的倾斜校正 (9)3.2.2 车牌的初步定位剪切 (11)3.2.3 车牌剪切去掉边框 (13)3.3 车牌二值化处理 (13)3.4 车牌识别 (14)3.4.1 建立字符识别库 (14)3.4.2 车牌识别结果 (15)第4章停车管理系统程序设计 (16)4.1 LABSQL (16)4.1.1 LABSQL简介 (16)4.1.2 LABSQL安装与配置 (16)4.2 SQL(结构化查询语言) (18)4.2.1 SQL简介 (18)4.2.2 SQL基本指令【6】 (18)4.3 停车管理系统主程序 (20)4.3.1主程序流程图 (20)4.3.2主程序前面板 (21)4.4 停车管理系统子程序框图 (25)4.4.1 读取数据库新VI (25)4.4.2 包月信息库VI (26)4.4.3 门禁信息库VI (26)4.4.4 包月车辆进入门禁 (27)4.4.5 非包月车辆进入门禁 (28)4.4.6 车辆离开门禁 (29)第5章测试结果与分析 (32)5.1 车牌识别普遍性测试 (32)5.1.1 反复训练识别的图像的测试: (32)5.1.2 不训练直接识别图像测试: (33)5.2 车牌识别算法测试结果分析: (35)5.2.1车牌定位效果分析 (35)5.2.2 车牌识别效果分析 (35)5.3 车牌识别停车系统测试 (36)第6章总结 (37)6.1 心得与体会 (37)6.2 不足与展望 (37)参考文献 (39)致谢 (40)第1章绪论1.1 研究背景及意义随着停车场的管理系统对网络化、智能化要求越来越高,传统停车场的管理系统已经不再满足要求了。
RFID停车场收费系统(基于LABVIEW)答辩
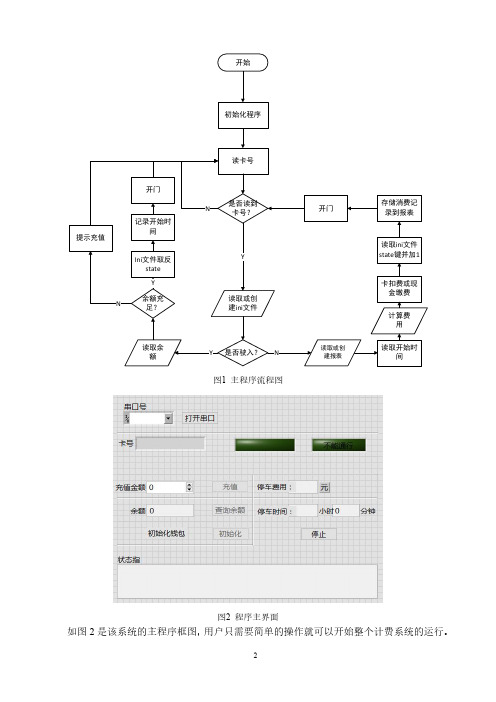
开始读取或创建ini文件读卡号是否读到卡号?N初始化程序Y是否驶入?Ini文件取反state记录开始时间读取余额Y余额充足?提示充值N开门Y读取开始时间读取或创建报表计算费用卡扣费或现金缴费存储消费记录到报表开门N读取ini文件state键并加1图1 主程序流程图图2 程序主界面如图2是该系统的主程序框图,用户只需要简单的操作就可以开始整个计费系统的运行。
在程序开始时,用户选择一个RFID读卡器对应的端口并点击打开串口,开始计费系统的运行,注册新卡时需要点击初始化按钮,将初始化卡和初始化钱包,该操作会让卡内余额设置为0。
当车辆取卡后会产生一个文件,存储车辆进入时间和在库状态当刷卡时程序首先判断卡片对应的车辆是入库还是出库,如果是出库则计算费用,并根据卡内余额扣费或者提醒工作人员收取现金,保存消费记录并点亮通行灯。
主程序框图如图3所示。
图3 主程序程序框图硬件操作子VI设计6.1高频RFID读写器和卡片测试首先使用硬件供应商提供的测试程序“HF高频读写器测试软件V3.0.exe”进行测试:图4 读卡器测试软件根据硬件手册,将设备设置成被动工作模式,然后尝试读取卡号,或者将读卡器设置成主动上传卡号,在卡片接近读卡器时会自动收到读卡器发送给上位机的数据。
使用RS232时需要将地址设置成20。
然后利用RFIDCommTest.vi测试LabVIEW程序与硬件设备的通信,即向串口发送命令并接收应答。
发送命令:0308C12002000116,应答为:0308C220000000XX。
可以使用测试程序“HF高频读写器测试软件V3.0.exe”查询是否设置成功。
6.2串口发送子VI图5UART_RT.vi程序框图图6UART_RT.vi前面板向串口写入数据后,等待设备响应,100ms之后从串口读取数据,在程序中使用的串口发送功能均使用这个子VI。
封装了visa端口配置、visa发送、visa读取、visa关闭,为打卡串口、读取串口和关闭串口配置了完整的过程。
基于Labview的无线网智能停车管理系统
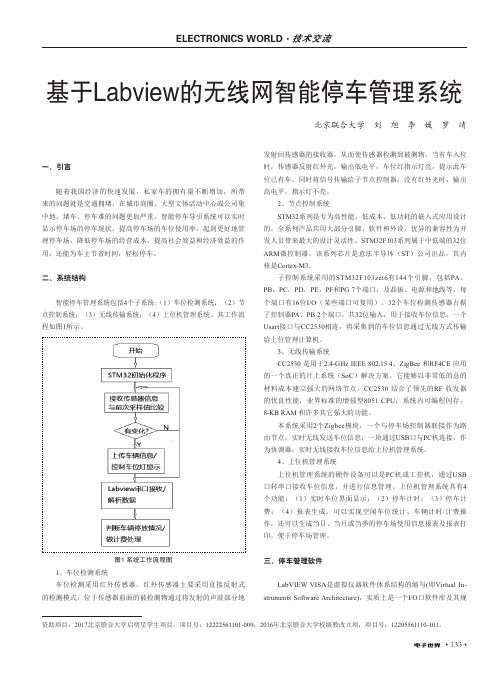
• 133•基于Labview的无线网智能停车管理系统北京联合大学 刘 旭 李 媛 罗 靖一、引言随着我国经济的快速发展,私家车的拥有量不断增加,所带来的问题就是交通拥堵,在城市商圈、大型文体活动中心或公司集中地,堵车、停车难的问题更加严重。
智能停车导引系统可以实时显示停车场的停车现状,提高停车场的车位使用率,起到更好地管理停车场,降低停车场的经营成本,提高社会效益和经济效益的作用;还能为车主节省时间,轻松停车。
二、系统结构智能停车管理系统包括4个子系统:(1)车位检测系统;(2)节点控制系统;(3)无线传输系统;(4)上位机管理系统。
其工作流程如图1所示。
图1 系统工作流程图1、车位检测系统车位检测采用红外传感器。
红外传感器主要采用直接反射式的检测模式,位于传感器前面的被检测物通过将发射的声波部分地发射回传感器的接收器,从而使传感器检测到被测物。
当有车入位时,传感器反射红外光,输出低电平,车位红指示灯亮,提示此车位已有车,同时将信号传输给子节点控制器;没有红外光时,输出高电平,指示灯不亮。
2、节点控制系统STM32系列是专为高性能、低成本、低功耗的嵌入式应用设计的,全系列产品共用大部分引脚、软件和外设,优异的兼容性为开发人员带来最大的设计灵活性。
STM32F103系列属于中低端的32位ARM 微控制器,该系列芯片是意法半导体(ST )公司出品,其内核是Cortex-M3。
子控制系统采用的STM32F103zet6有144个引脚,包括PA ,PB ,PC ,PD ,PE ,PF 和PG 7个端口,及晶振、电源和地线等,每个端口有16位I/O (某些端口可复用)。
32个车位检测传感器占据了控制器PA 、PB 2个端口,共32位输入,用于接收车位信息;一个Usart 接口与CC2530相连,将采集到的车位信息通过无线方式传输给上位管理计算机。
3、无线传输系统CC2530 是用于2.4-GHz IEEE 802.15.4、ZigBee 和RF4CE 应用的一个真正的片上系统(SoC )解决方案。
LabVIEW在智能交通系统中的应用

LabVIEW在智能交通系统中的应用智能交通系统是利用现代信息技术和通信技术来提升交通效率、安全性和环境保护的一种系统。
LabVIEW作为一种基于图形化编程的软件开发平台,在智能交通系统的设计和实现中发挥着重要作用。
一、LabVIEW在智能交通系统中的数据采集和处理在智能交通系统中,实时准确的数据采集和处理是非常重要的。
LabVIEW具备强大的数据采集和处理功能,可以通过各种传感器和设备来采集和处理交通状况信息。
通过LabVIEW的图形化编程界面,可以方便地设计和配置数据采集模块,实时获取交通信息,并进行实时的数据处理和分析。
这些数据可以包括交通流量、车辆速度、路面状况等信息,为智能交通系统的优化调度提供了重要的数据支持。
二、LabVIEW在智能信号灯控制中的应用交通信号灯是交通系统中非常重要的组成部分。
传统的交通信号灯控制方式往往采用固定的时序控制方法,无法根据实际交通情况进行动态调整。
而LabVIEW可以通过软件编程结合传感器采集的交通信息,实时地调整信号灯的时序,达到最佳的交通流量控制效果。
LabVIEW的图形化编程界面可以直观地显示信号灯的状态和控制逻辑,方便工程师进行设计和调试。
三、LabVIEW在车辆识别和车牌识别中的应用智能交通系统中的车辆识别和车牌识别是智能视频监控的重要内容。
LabVIEW可以结合图像处理模块,通过机器视觉算法对监控视频进行实时分析和识别。
利用LabVIEW编程,可以将图像处理、模式匹配等算法应用于车辆和车牌的识别,实现对交通流量和车辆通行情况的监测。
这为交通管理部门提供了强大的工具,可以实时了解路面交通情况,及时做出相应的调度和处理。
四、LabVIEW在智能交通系统的远程监控和管理中的应用智能交通系统的远程监控和管理是保障交通安全和高效运行的关键。
LabVIEW可以通过网络连接,实现对智能交通系统的远程监控和管理。
通过远程终端,可以实时地获取交通状况信息,并进行分析和调度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业(设计)论文题目基于LABVIEW的车牌识别停车系统设计学院机械工程学院专业测控技术与仪器学生姓名学号年级2012指导教师职称2016年4 月25 日基于LABVIEW的车牌识别停车系统设计摘要:随着停车场的管理系统对网络化、智能化要求越来越高,传统的基于I C卡技术的停车场管理系统已经不再满足要求了。
在此背景下,本文提出一种基于LABVIEW的车牌识别停车系统的设计方案。
本系统基于NI VISION视觉开发模块进行车牌识别算法设计,车牌识别算法主要由图像预处理、车牌区域的定位、车牌的识别三大部分组成。
对需要识别的图像的具体处理过程分为:读取、大小归一化、车牌倾斜校正、车牌区域初步定位并剪切提取、大小再归一化、剪切去掉提取出的车牌边框、二值化、OCR训练、OCR识别9个步骤。
车牌区域的定位是实现车牌识别算法的最关键步骤,本设计主要采用HSL模式下颜色阈值及形态学处理来实现的。
车牌识别算法采用的是模板匹配法,是通过LABVIEW的视觉助手的OCR功能实现的。
在此进出上进一步设计停车管理系统,主要使用LABSQL,并配合SQL指令来进行开发的。
实现了车辆进出门禁的自动识别、登记、计费。
其中对零时停车按时计费,对包月车辆不收费。
对150个实际采集样本测试,车牌区域定位成功140个,完全识别出125个车牌,测试识别率为83.3%。
关键词:LABVIEW 车牌识别停车场管理视觉助手LABSQLLicense plate recognition and Parking management systembased on graphics designSpecialty:The measurement and control technology and instrumentStudent Number:201210114112Student:Zeng Xingyu Supervisor:Cheng YueAbstract:As the parking lot management system of network, the software demand is higher and higher, the traditional parking lot management system based on the technology of I C card is no longer meet the requirements.In this background, this paper proposes a design scheme of license plate recognition system based on LABVIEW The design of parking management system is mainly used LABSQL, and cooperate with the development of SQL commands.The vehicle in and out of the door can be automatically identification, registration, billing.Monthly vehicle for temporary parking pricing, on time in case of no charge.This system based on NI VISION development module for license plate recognition algorithm design VISION, license plate recognition algorithm is mainly composed of the positioning of the image preprocessing, license plate area, the license plate recognition of three parts.The images of the need to identify the specific process is divided into: read, size normalization, license plate tilt correction, preliminary localization and shear plate region extraction, size normalization, shear off again to extract the license plate frame, binarization, OCR training, OCR nine steps.Locate license plate area is the most key step of license plate recognition algorithm, this design mainly adopts an HSL color mode threshold and morphological processing.License plate recognition algorithm is used in the template matching method, is through the implementation of the LABVIEW visual aide OCR function.In and out on the further design of parking management system, the main use LABSQL, and cooperate with the development of SQL commands.The vehicle in and out of the door can be automatically identification, registration, billing.Monthly vehicle for temporary parking pricing, on time in case of no charge.To test 150 samples, the license plate localization success 148, totally identified 125 plates, test the recognition rate is 83.3%. Keywords:Vehicle license plate recognition Management of parking lot Vision Assistant LBSQL目录第1章绪论 (1)1.1 研究背景及意义 (1)1.2 涉及热门研究领域现状 (1)1.2.1 车牌识别研究现状 (1)1.2.2 机器视觉研究现状 (2)1.3 主要研究内容 (2)第2章系统总体设计 (3)2.1 车牌识别原理概述 (3)2.2 设计方案 (4)2.2.1 开发平台选择 (4)2.2.2 车牌识别设计方案 (5)2.3 相关软件简介 (6)2.3.1 LABVIEW简介 (6)2.3.2 NI视觉开发模块简介 (7)第3章车牌识别程序设计 (8)3.1 图像读取与简单预处理 (8)3.2 车牌区域定位剪切 (8)3.2.1 车牌的倾斜校正 (9)3.2.2 车牌的初步定位剪切 (11)3.2.3 车牌剪切去掉边框 (13)3.3 车牌二值化处理 (13)3.4 车牌识别 (14)3.4.1 建立字符识别库 (14)3.4.2 车牌识别结果 (15)第4章停车管理系统程序设计 (16)4.1 LABSQL (16)4.1.1 LABSQL简介 (16)4.1.2 LABSQL安装与配置 (16)4.2 SQL(结构化查询语言) (18)4.2.1 SQL简介 (18)4.2.2 SQL基本指令【6】 (18)4.3 停车管理系统主程序 (20)4.3.1主程序流程图 (20)4.3.2主程序前面板 (21)4.4 停车管理系统子程序框图 (25)4.4.1 读取数据库新VI (25)4.4.2 包月信息库VI (26)4.4.3 门禁信息库VI (26)4.4.4 包月车辆进入门禁 (27)4.4.5 非包月车辆进入门禁 (28)4.4.6 车辆离开门禁 (29)第5章测试结果与分析 (32)5.1 车牌识别普遍性测试 (32)5.1.1 反复训练识别的图像的测试: (32)5.1.2 不训练直接识别图像测试: (33)5.2 车牌识别算法测试结果分析: (35)5.2.1车牌定位效果分析 (35)5.2.2 车牌识别效果分析 (35)5.3 车牌识别停车系统测试 (36)第6章总结 (37)6.1 心得与体会 (37)6.2 不足与展望 (37)参考文献 (39)致谢 (40)第1章绪论1.1 研究背景及意义随着停车场的管理系统对网络化、智能化要求越来越高,传统停车场的管理系统已经不再满足要求了。
传统的停车场的管理主要通过给进入车场的车辆分发IC卡,记录车辆进出时间,作为计费的主要依据,不管是固定车辆还是临时车辆,进出停车场都必须在出入口停车刷卡后,才能进出停车场,在车辆出入繁忙的时段,这种管理方式往往造成塞车的现象,耽误车主宝贵的时间。
针对以上现象,利用车牌识别技术取代传统的IC卡技术,解决车辆进出时必须停下刷卡而造成的停车场进出口塞车现象,是非常有必要的。
车牌识别停车场系统有如下优点:作为车主,免去刷卡、丢卡、损坏卡的麻烦。
作为管理方,免去安装IC读卡器及维护的麻烦、省去卡片的费用、杜绝一卡多用、免掉发卡的麻烦、充值延期等。
操作简单、系统升级不用换硬件了、并可以与公安部门的报警系统联动等等。
因此进行基于车牌识别的智能停车管理系统的研究是十分重要的。
1.2 涉及热门研究领域现状1.2.1 车牌识别研究现状国内有大量的学者从事这方面研究,提出了很多新颖快速的算法。
中国科学院自动化研究所的刘智勇等开发的系统,在一个样本容量为3180的样本中,车牌定位准确率为99.42%,切分准确率为94.52%,这套系统后来应用于汉王公司的车牌识别系统,取得了不错的效果;南京大学的熊军等提出了基于字符纹理特征的定位算法,准确率达95%【1】。
华中科技大学的陈振学等学者提出了一种新的车牌图像字符分割与识别算法,使用一维循环清零法,通过对垂直投影图进行一次扫描,有效的清除了杂点和间隔符,正确分割率达到了96.8%。