三菱编码器通讯线 接线图
三菱电机SSCNETⅢ、J4 J3 JN、松下MINAS等伺服线束说明书

欧姆龙OMNUC W伺服线束
安川电机ΣV 伺服线束
安川电机ΣⅢ 伺服线束
安川电机ΣⅡ 伺服线束
基恩士SV伺 服线束
基恩士MV 伺服线束
台达A2/B2/ AB伺服线束
AC伺服马达 控制信号转换线束
ϐϯ൪߸ ৴߸
6
引脚号 信号7名
2
8U
3 'V(
4
W
1
FG
ઢ৭
Equipment harnesses
Servo Motor Harnesses
机
MITSUBISHI J4/J3/JN Servo Motor Harnesses
器 设
三菱电机 J4/J3/JN伺服线束
备
线 束
马达电源线束 接线图
伺
SVPMZ-J3HF1(R) SVPMH-J3HF1(R)
SVPMH-J3HF2(AL)
隔离
3 4 7 8 9 外壳
SVEMZ-J3HF1M(RM) SVEMH-J3HF1M(RM)
产品页b2508, 2511
中继侧
ֵোৡ
3 /* 05 055 0' 0'5 %$7 6(/ 6+'
$ 咥 咥ˋⱑ 㑶 㑶ˋⱑ 㓓 㓓ˋⱑ 咘 咘ˋⱑ 䱨行
㒓㡆
% 㪱 㻤 㓓 㑶 ♄ 咘 咥 䱨行
' ˋ咥 ˋ㑶 ♄ˋ咥 ♄ˋ㑶 ⱑˋ咥 ⱑˋ㑶 咘ˋ咥 咘ˋ㑶 䱨行
ઢ৭ ന ੨ 线:色(
红
白
蓝
黄绿
※设备侧接插面视图
SVPMH-J3HF9(AL)
产品页b2509ʙ2510
(" '
完整版三菱PLC接线图例

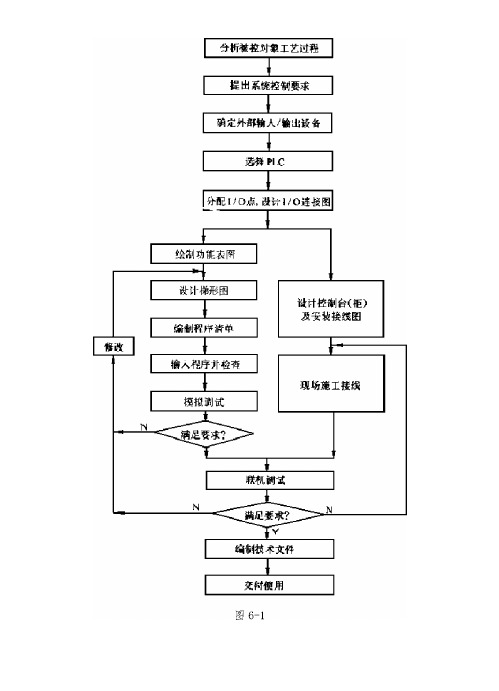
图6-1COM 1N0 INIINn COMIIK IIN2IN3COM2PLC IN4[N5LN6)AJ7PLC-2ovroCOMOOUT!OU12OUT3COMIOUT4OLT5OIJT6O(JT7COMOOUTOCOMIOUT1a)PLCCOM2ounCOM3OUT3b)图6-5L N | XO | X2 | X4 | X6 | X10 | X12 X14X16 i图6-4| 吉 UDIVl II KS xn I Kf X图6-7FX 系列PLC旋转编码器□DC24V\Q*L电潦+图6-9图6-8P 空站 :]冲]*1 | ¥2 ] : ] 丫4 | 年 1 : I 牛 | 三 | 盘匚I : [C 6MO [C 6MI |C 6IVIE | 届 |c6ivi 亍| V]石 忙6鵬|丫冇FU电湧 亡I 亡I rtTti nnnnfft出设备感性输出设备PLC豐出____ rw^ _____ __________ E>J _____VD T 感性输出设备___________ rwA __________PLC输a 出图6-10Y0Y1Y2Y3Y4 PLCY5CD4513e —I ♦—1CD4513ILcOHco1±XoXX7Xs动QI /罗…图 6-15b)c PLVD1H VD2N VD3母D4JYo Y2 OM c图6-18图6-19单歩回原位、1/单周期回原位厂手动一—连续松开左行上升起动电源(SB7)(SB1)夹紧右行下降停止惫停誌)(SB4)L3-9 H碎早辛土丁斟游沁師酿茅却至艸w軀圭公屈程序P0P1P2图6-221S00 2<10SET H1QK0K 1M0RST M10ZRST Ftfl M18RST Ml上升下隆左行右行!呼T严H4I [Mia _1严_1 卩is | pi|卩1.0 |严-pll——_|卩11 I严_| |E12 _|呼宀 _||町3 _|卩]_3 |严_| |H14 __________ |卩14 |产I?_|_| |Mg | |^11| p!6_______ T呻H卩iTpiL_i严i卜览T冲_1严丁阿_1严1严连缤X2/Hill710XI2M2rJll2哑厂冲用-------------- 夹紧牛严-------- 叵上升下隆上升M2rX10rXll CD下降Jzpai| p!6H RSTL SET左行右行松齐Y4回原位起动松开上升左行回康位停止图6-27图6-28图6-30FX JK*4KMR FX L^-4AD FX2N*16EX FX SN-2DA FX JN-32ER FX:N-4AD-TC XOOO X027特殊模Jft MHO 料殊檯块X050-X067YWP-Y027¥D3/¥3T图6-31图6-32将灿匚槻税的瞑剤码AUF 肿比塞出・忻存在IM 中匚 比轻识别码是否拘3U1O(FX-4AD),若呈则船为口阶^H?3C0^人舒朋0〔通道初始化)・CHK CH2H 夷电压输人,CH3 , CH4关闭*樓4写.\EFMII1和BKU 莊"CHI , CH2」;■■均民梅独臨 设为先tt FFIH 的中的错观信羸读到M. 5 -监0中*若役有嚣谒,则将HFK 麵和BPM 粕中内容(BOCHl相厂总的平卸直、左至DOfm I l图 6-33q hlOUp1DO|K4MlOO TOKI | Kir ; |K?Mir| KITOKII K17 |H0004| KI |TO Ki I K17 HOOOOf KL { TO ] KI [ K16 QI ―I TO I KI | K1F 血002帀_I TO | KI I Kl¥ HUOCKJI K 】 丿 ―| 丁0 | KI [ KM |K2MW0| 石I TO 」KI [KM IHOQD4[运ITO | KI 卩 |而000[ KI ―| TO ] KI | Klfi [JHIH 曲「初 ―I TO | KI | KM iHOOOll KI 、 碍IMO 厂鹤据怪送尹W 11E-S1OD^:将[閻临奴碼(tnmoc)写入EFX *16中】倩喇琥住娥据:将高4位数捱(M :. 11-K108)写入BFMM1S 中*民仃CEL 旳IV 戌轧换略D1C1中蠡据f 专送刮IIH 「"1DD 中; 將恢E 世归据'MlOT-MlMJSXEFMiiie 7!1!将高诳奴据(Mlll-mae)頁入EPMW16中t祇行CE 狛山"一转悭TO ] KI | K 卯 |HOOOD[ KI 丿忙ROM| 旳 K30 D4 KIXOOOH FXOO1图6-35x»oo[S订[52][S3][D] l-NG 8SPID DO D1DIOO DI50蛉定值(SV)屁氓储CPV)参数输出值(MV)图6-36xotYO□YCi亠一x Oi IshJ图6-38 Arraya) b)图6-39乐西红打J 南£斶IT T 南北蚩灯 启动」 南V 邀灯」 东酉绿灯H 乘函堇灯4 UUUU n 15s 15s 图 6-40 图 6-41333 SQ4 SQ5 5左行右行T E KK2 Kill -fib —— $厂 c: YVlf 上升1 \USQ2 下降| y c/LSQl iVZf 电磁殁盘YA b Q Q h bJLJ 图 6-42。
编码器的原理接线图与应用

编码器的原理接线图与应用1. 编码器的原理编码器是一种将输入的信息转换为特定编码形式输出的设备。
在数字电子系统中,编码器被广泛应用于信号处理、通讯系统、自动控制等领域。
它能够将模拟信号或数字信号转换为二进制等特定编码形式,以便于数字电子系统的处理和分析。
编码器的原理是基于信号转换和编码规则来实现的。
具体而言,编码器接收输入信号,通过一系列的电路或算法将其转换为输出编码,以实现信号的传递、处理和解析。
常见的编码器包括二进制编码器、格雷码编码器、双进制编码器等。
2. 编码器的接线图编码器的接线图通常包括输入端、输出端和电源端。
根据不同类型的编码器和具体应用场景的需求,接线图的具体连接方式可能会有所不同。
以下是一个典型的编码器接线图示例:输入端:- 输入信号 A- 输入信号 B输出端:- 输出编码 X- 输出编码 Y- 输出编码 Z电源端:- 正电源 VCC- 负电源 GND3. 编码器的应用编码器在数字电子系统中有着广泛的应用,涵盖了多个领域。
以下是编码器常见的应用场景:3.1 信号处理在信号处理领域,编码器被用于将模拟信号转换为数字信号以便于处理和传输。
通过编码器,模拟信号可以以数字形式表示,便于数字电子系统进行进一步的分析、处理和传递。
3.2 通讯系统编码器在通讯系统中扮演着关键角色。
它可以将信号转换为特定编码形式,以便于在传输过程中提高信号的可靠性和传输效率。
常见的应用包括调制解调器和数据压缩等。
3.3 自动控制在自动控制系统中,编码器常用于将传感器获取的物理量转换为数字信号,以实现自动控制和反馈调节。
通过编码器,可以将物理量转换为数字形式,便于电子设备进行分析和控制。
3.4 其他应用除了上述应用场景外,编码器还广泛应用于音频信号处理、视频编码、数据存储等领域。
在音频信号处理中,编码器可以将声音信号转换为数字形式,以便于音频文件的存储和处理。
在视频编码中,编码器可以将模拟视频信号转换为数字视频信号,以便于视频压缩和传输。
三菱电机MR-J4全闭环控制的连接
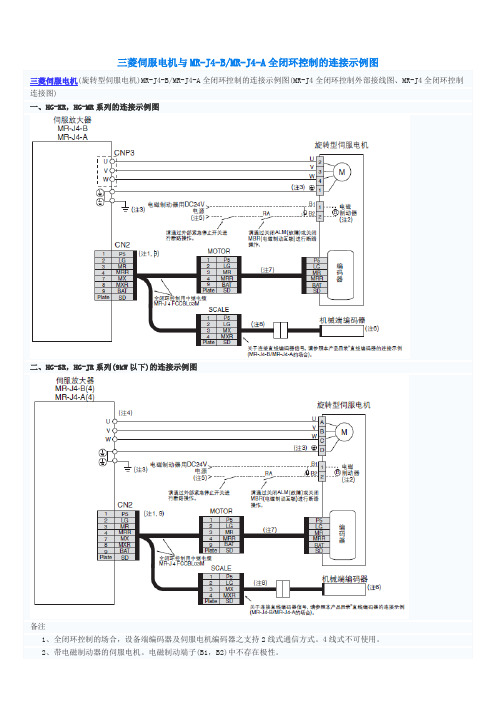
三菱伺服电机(旋转型伺服电机)MR-J4-B/MR-J4-A全闭环控制的连接示例图(MR-J4全闭环控制外部接线图、MR-J4全闭环控制连接图)
一、HG-KR,HG-MR系列的连接示例图
二、HG-SR,HG-JR系列(9kW以下)的连接示例图
5、不可将接口用DC24V电源兼用作电磁制动器用电源,请务必为其配置专用品。
6、关于直线编码器,请参照MR-J4伺服驱动&电机用户手册目录中目录的3.直线电机“直线编码器一览”。
有关使用旋转编码器的全闭环功能,请参照各伺服放大器技术资料集。7、三菱提供Fra bibliotek套的编码器电缆。
8、根据设备端编码器不同,所需编码器电缆也各不相同,请参照各技术资料集。
五、HG-RR、HG-UR系列的连接示例图
备注
1、在全闭环控制下,设备端编码器以及伺服电机编码器仅支持2线式的通信方式。无法使用4线式。
2、带电磁制动器的伺服电机。电磁制动端子(B1,B2)中不存在极性。HG-UR202B~HG-UR502B的电磁制动器接头与伺服电
机电源接头不同。此外,根据伺服电机容量的不同,引脚编号也有所不同。
有关使用旋转编码器的全闭环控制的详细信息,请参考各伺服电机的技术资料集。
6、三菱提供配套的编码器电缆。
7、根据设备端编码器的不同,所需要的编码器电缆也有所不同,请参考各技术资料集。
8、请组合使用外设动态制动(选件)。如果不连接外设动态制动,则在紧急停止时伺服电机
不会停止而是进入到自由运行状态从而导致碰撞事故。
2、带电磁制动器的伺服电机。电磁制动端子(B1,B2)中不存在极性。
3、请通过控制柜的保护接地(PE)端子,转接伺服放大器的保护接地(PE)端子进行接地。
详细图文解析编码器正确的接线方法
详细图文解析编码器正确的接线方法
编码器正确的接线方法:
(1)正确接线至关重要,如图1 为NPN 输出增量型E6B2-CWZ6C 的接线原理,图2 为NPN 输出增量型E6B2-CWZ6C 的实际接线,棕色线接电源正极,蓝色线接电源负极,黑色线接输入0.00,白色线接输入0.01,橙色线接输入0.04,PLC 的COM 接电源正极。
(2)下图为PNP 输出增量型E6B2-CWZ6B 的实际接线图,棕色线接电源正极,蓝色线接电源负极,黑色线接输入0.00,白色线接输入0.01,橙色线接输入0.04,PLC 的COM 接电源负极。
(3)图1 为绝对值型编码器的线与PLC 输入的点的对应图,图2 为NPN 输出绝对值型E6C3-AG5C 的实际接线图,红色线接电源正极,黑色线接电源负极,褐色线接输入0.00,橙色线接输入0.01,黄色线接输入0.02,绿色线接输入0.03,蓝色线接输入0.04,紫色线接输入0.05,灰色线接输入0.06,白色线接输入0.07,粉色线接输入0.08,PLC 的COM 接电源正极。
(4)下图为PNP 输出绝对值型E6C3-AG5B 的实际接线图,红色线接。
编码器PLC接线
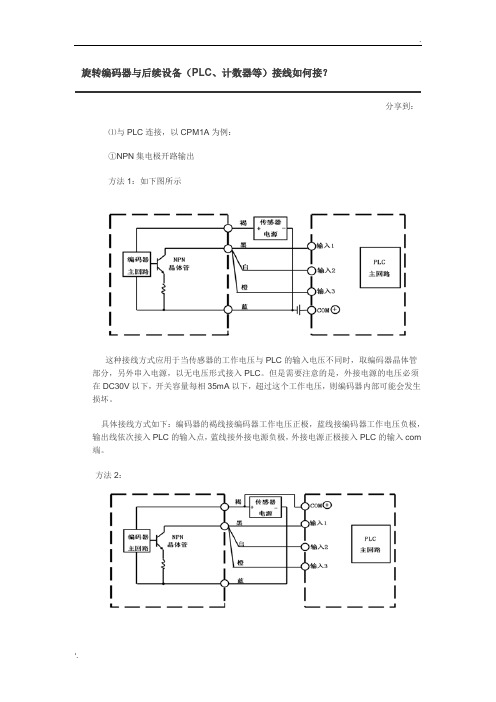
旋转编码器与后续设备(PLC、计数器等)接线如何接?分享到:⑴与PLC连接,以CPM1A为例:①NPN集电极开路输出方法1:如下图所示这种接线方式应用于当传感器的工作电压与PLC的输入电压不同时,取编码器晶体管部分,另外串入电源,以无电压形式接入PLC。
但是需要注意的是,外接电源的电压必须在DC30V以下,开关容量每相35mA以下,超过这个工作电压,则编码器内部可能会发生损坏。
具体接线方式如下:编码器的褐线接编码器工作电压正极,蓝线接编码器工作电压负极,输出线依次接入PLC的输入点,蓝线接外接电源负极,外接电源正极接入PLC的输入com 端。
方法2:编码器的褐线接电源正极,输出线依次接入PLC的输入点,蓝线接电源负极,再从电源正极端拉根线接入PLC输入com端。
②电压输出接线方式如图所示:具体接线方式如下:编码器的褐线接电源正极,输出线依次接入PLC的输入点,蓝线接电源负极,再从电源正极端拉根线接入PLC输入com端。
③PNP集电极开路输出接线方式如下图所示:具体接线方式如下:编码器的褐线接工作电压正极,蓝线接工作电压负极,输出线依次接入PLC的输入com端,再从电源负极端拉根线接入PLC的输入com端。
④线性驱动输出具体接线如下:输出线依次接入后续设备相应的输入点,褐线接工作电压的正极,蓝线接工作电压的负极。
⑵与计数器连接,以H7CX(OMRON制)为例H7CX输入信号分为无电压输入和电压输入。
①无电压输入:以无电压方式输入时,只接受NPN输出信号。
NPN集电极开路输出的接线方式如下:具体接线方式如下:褐线接电源正极,蓝线接电源负极,再从电源负极端拉根线接6号端子,黑线和白线接入8和9号端子,如果需要自动复位,则橙线接入7号端子。
NPN电压输出的接线方式如下:接线方式与NPN集电极开路输出方式一样。
②电压输入NPN集电极开路输出的接线方式如下图所示:具体接线方式如下:褐线接电源正极,蓝线接电源负极,再从电源负极端拉根线接6号端子,黑线和白线接入8和9号端子,如果需要自动复位,则橙线接入7号端子。
西门子1200与三菱MRJ4伺服接线图
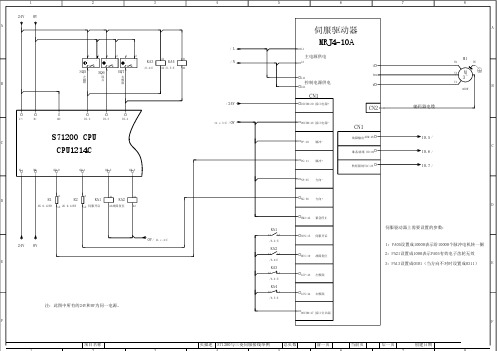
1234567824V0VA121212+-+-+-KA3/L A1A1KA4/N伺服驱动器MRJ4-10AL1主电源供电L3AM1W1PESQ53左极B限SQ63原点SQ73右极限/6.4:EA2/6.5:EA2/24VL11控制电源供电L21CN1DICOM:20接口电源+U V WCN2编码器电缆V1M 3~U1B400WL+:M:1M:I0.2I0.3I0.411.c.3:E /0VDOCOM:46接口电源-CN1S71200CPU CCPU1214CPP:10脉冲-故障输出ALM:48准备就绪RD:49I0.5/CI0.6/3L:3M:Q0.0Q0.1Q0.2Q0.3PG:11脉冲+转矩限制TLC:23I0.7/NP:35方向-x1DR1x1R2KA1A1A1KA2NG:36方向+2K 0.125Wx22K 0.125Wx2伺服开启A2故障复位A2DKA1EM2:42紧急停止伺服驱动器上需要设置的参数:1413SON:15伺服开启24V0V0V /11.c.4:C/6.2:EKA21:PA05设置成10000表示给10000个脉冲电机转一圈1413RES:19故障复位2:PA21设置成1000表示PA05有效电子齿轮无效E/6.4:EKA33:PA13设置成0301(当方向不对时设置成0311)E1211LSP:43左极限/6.4:EKA41211LSN:44右极限注:此图中所有的24V和0V为同一电源。
/6.5:EDOCOM:47接口公共端FF创建日期项目名称页描述S71200与三菱伺服接线举例总页数前一页当前页后一页。
编码器接线图
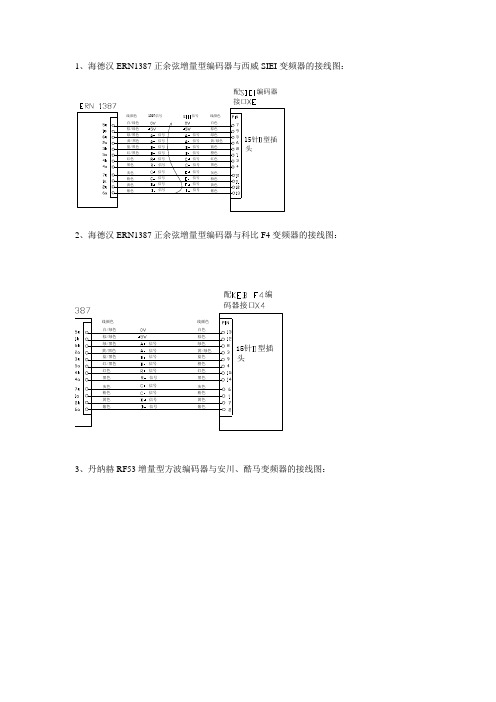
1、海德汉ERN1387正余弦增量型编码器与西威SIEI 变频器的接线图: 信号1387信号信号信号信号信号信号信号信号信号信号信号配
编码器接口
黄/黑色
白/绿色
棕/绿色
绿/黑色
蓝/黑色
红/黑色
红色
黑色
线颜色
紫色黄色
粉色
灰色灰色粉色黄色紫色15针型插头
线颜色黑色红色橙色蓝色黄/绿色绿色棕色白色信号信号信号信号信号信号信号信号信号信号
2、海德汉ERN1387正余弦增量型编码器与科比F4变频器的接线图:
配
编码器接口
黄/黑色
白/绿色
棕/绿色
绿/黑色
蓝/黑色
红/黑色
红色
黑色
线颜色
紫色黄色
粉色
灰色
灰色粉色黄色紫色15针型插头
线颜色黑色红色橙色蓝色黄/绿色绿色棕色白色信号信号信号信号信号信号信号信号信号信号
3、丹纳赫RF53增量型方波编码器与安川、酷马变频器的接线图:
紫/黑
紫
绿/黑
绿
蓝/黑
蓝
红黑
4、丹纳赫RF53增量型方波编码器与爱默生变频器EV3100接线图:
信号信号信号信号信号信号信号信号信号信号信号信号绿色棕/黑色绿/黑色灰/黑色蓝/黑色白色蓝色黑色棕色红色灰色紫/黑色
白/黑色紫色信号信号信号紫色
白/黑色
紫/黑色信号信号配编
码器接口
灰色
红色
棕色
黑色
蓝色
白色
蓝/黑色线颜色
灰/黑色
绿/黑色
棕/黑色
绿色
15针型插头
线颜色信号信号信号信号信号信号信号信号 信号。
335b三菱接线原理图

FX1N-40MT
COM5 Y014 Y015 Y016 Y017
脉冲
8 9 29 41 7 1 2 37 36 4 6
方向
24+
COM
COM0 Y000
COM1 Y001 COM2
接红色
o5 1Y
接白色
接黑色
CNX2 U(3) V(2) W(1)
HL1
HL2
HL3
MADD1207003
0V
VCC
描
写
0V
Print to PDF without this message by purchasing novaPDF (/)
YL-335B型自动生产 中国亚龙科技集团 线实训考核装备
日期 图样标记 数量 重量 比列
描
校
旧底图总号
底图总号
签
字
说 明 1.PLC输入口及各传感器工作电源均使用外 部电源,其正极标号为24V,负极为0V,PLC 内部电源不使用。
5#站(分拣站)电气原理图
日
期
335B-SM-00-00
共 页 第 页
标记 处数 更改文件号 签字 设 计 标准化 校 对 (审定) 审 核 工 艺 日 期
金属 传感 器检 测
物料 有无 检测
物料 不够 检测
物料 台物 料检 测
推料 复位 检测
推料 到位 检测
顶料 复位 检测
顶料 到位 检测
棕兰黑 棕兰黑 棕兰黑 棕兰黑 色色色 色色色 色色色 色色色
L X014 X015 X016 X017
N
COM
24+
X000 X001 X002 X003 X004 X005 X006 X007 X010 X011 X012 X013
三菱PLC接线图例
b)
o口仆口
图6-4
图6-6
输入电源
两线式
传感器
图6-8
图6-14
]_
FU
[]
1y
VI
上
升
L
V2
下
降
k
V3
左
行
L
V4
右
行
脚
v5
Y
Ln1201234NMYYYYYoo
cc
o1234-b6E-01Mt~-1-I1-IT-IT-IT—|T—|1-1T-IXXXXXXXXXXXXXc
一ISB一ISB-ISB一风场-ISO-w-ISB-ISB一ISB-ISB而ISB
林与•1;•策尤「mIIMl00)写入BFM#6中]
―| TU | KL
K17 iHDCOll KL
执行GH2的D介转换
1丁、|KJ.
kr IhooooI kl
xooo
FNG 88 PID
DO
DI
D100
DI50
参数
输出值
(MV)
给定值 反馁便
(SV) (PV)
[si] [82][S3][D]
图6-36
—| 丁、|KJ.
K17 iHOOOll KI
―|TU|JL
K17
HOOOOl KI
―|TQ|KL
K16 IKIMIOSI KI
将高3位数据CNU1-ML03)写XBFN#16祗
—|TO|K1
K17
H0002| KI
执行CH1的D/A转换
一0101中数据传送到H115 M0口中[
将低g位数据[MICZ-MIOS写入EFM肛日中;
劭位步期续动止位位位位位升降行行开紧手原单周连起停原限限限限上下左右松夹回单回上下左右
三菱MR-J3-40B伺服放大器应用实例

三菱MR-J3-40B伺服放大器应用实例本人设计一套空间曲线自动焊接设备时用到了三菱MR-J3-40B伺服放大器,现将设计与使用心德与大家分享如下。
本空间曲线焊接设备控制系统包括三菱Q系列CPU、输入模块、输出模块、QD75MH4定位模块、人机界面和3个MR-J3-40B伺服放大器及电机。
三菱MR-J3-40B伺服放大器使用主要包括电气接线、外围开关设定和参数程序设定调试等三部分。
1 电气接线三菱MR-J3-40B伺服放大器及电机电气连接图如图1所示。
图1 MR-J3-40B伺服放大器及电机电气连接图三个伺服放大器主电路为AC220V供电,控制电路用SSCNETIII光纤通信总线电缆菊花型连接。
通过SSCNETIII电缆可以最大限度地节省配线,两站之间的最大连接距离可达50米。
MR-J3-40B伺服放大器与HF-KP43伺服电机之间接线如图2所示,伺服电机HF-KP43与伺服放大器MR-J3-40B编码器接口针脚号及接线方式如图3所示。
图2 伺服与电机之间动力线接线图图3 伺服与电机之间编码器接线图根据上述方法连接好伺服放大器及电机的线缆后伺服放大器如图4所示。
图4 接好线后的伺服放大器2 外围开关设置MR-J3-40B伺服放大器外围开关设定:正常运行时,拔码开关SW2均需拔在Down。
根据伺服放大器所处位置及位置模块的定义,SW1选择伺服放大器所对应的轴:SW1=0时对应第一轴,SW1=1时对应第二轴,以此类推,SW1=15时对应第十六轴。
本实例中回转伺服SW1=0,升降伺服SW1=1,伸缩伺服SW1=2。
如图5所示。
本系统采用绝对位置定位,所以伺服放大器需配绝对位置记忆的电池,伺服放大器的CN4接口接电池,电池如图6所示。
图5 伺服放大器外围开关图6 MR-J3-40B伺服放大器绝对位置记忆电池3 参数程序设定调试伺服放大器外围接线完成并外围开关设定好之后,就可以接通伺服放大器电源,点亮伺服放大器,此时有两种方法可以设定伺服放大的的参数,一种是通过CN5口用电脑将设定好的参数下载到伺服放大器中,另一种方式是在GX-Works2中的通过编程的方式进行参数设定后下载到Q系列PLC中,再通过QD75MH4模块的SSCNETIII光纤通信总线控制伺服放大器。
编码器接线图集合

国产部分编码器接线图
国产袜机专用伺服电机编码器生产厂家主要有广洲多摩川 公司的光电增量式2500P 编码器因为具有良好的性价比使用最为广泛__.而老式的三菱,富士伺服因为编码器
难找且价格昂贵有被淘汰的可能•这是由于袜机的控制精度只需
2500P 就足够了 .但对于一些品质较好,工作 较为稳定的国外伺服电机L 在数控方面还是有很大优势的 注意:由于各厂商生产的编码器在实品用途中有所不同,如更换或代换后出 现
电机反转现象可按下述原则给于纠正:
蘇蠶謀倉鹭喘蠶社弊矗嚳聶慕 .成都思迪.长春禹衡,江苏瑞普等几家,现以瑞普
.卜面是儿款国产增量式编程器的实际接线图 ,仅供
成黑 白绿兰红掰黄棕 白 双黄亠线. 蔽 屏 黄禄祷橙橙兰
兰屏 吃3 罠 瑞黑红绿爲白 黑黑黑
白黄黄棕标衣 -I 多黑一红兰 瑞黑
黑 兰绿
衣白
一白屏 红绿
般
白
一
bit 罠 白黄
黄棕 5
P 4 春白
白
蔽
4^黄黄兰
兰
屏
白
白
A ——>
B Q ——> •B
B —>A B ——>-A Z ——>Z / z ——> -U ——>/U
V — ->/W
Y ——>w
ft ——
W ---。
三菱MR-J3S驱动器接线图及参数调整
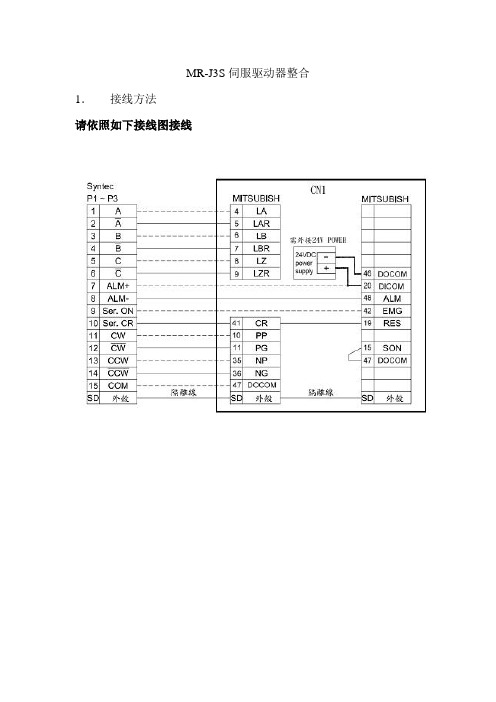
MR-J3S伺服驱动器整合1.接线方法
请依照如下接线图接线
2.参数调整
以下为供参考的建议参数值,基本参数一般不变,增益滤波器参数视不同的机台有所改变
MR-J3伺服参数表
(注:简称前面带有*的参数,设定后将电源断开,再重新接通电源,参数生效。
)
3.自动调谐方法和步骤
a.PA08设0001,PA09先设一个初始值,如:18;
b.手动或自动让该轴空跑,速度保证在让马达在1000RPM,比如螺距为
5mm的,则机台该轴向线速度保证在5000MM/MIN,并且至少要有一段
距离是等速运动,看机台是否会抖,有没有共振的声音发出,如果没有,则加大PA09再做;如果有,则说明PA09设定过大,则减小该值再试一
次,直到测试到一个合理的不响的值,有的时候如果觉得机台刚性太低
且又响,可以考虑打开滤波功能(PB13);
c.把PA08设0003,到此自动调谐以完成;
d.每个轴向可以设不同的PA09做自动调谐。
4.刚性调整
做好自动调谐后,就可以进行刚性调整了,相关参数有:
PB07:PG1 模型环增益
PB08:PG2 位置环增益
PB09:VG2 速度环增益
PB10:VIC 速度微分补偿
通常情况下,PB07、PB08、PB09相对调大,机台刚性高,响应快,加工好,但是过大机台会抖;PB10相对调小,机台刚性高,响应快,加工好,但是过大可能会导致机台抖动。
完整版三菱PLC接线图例
图6-1COM 1N0 INIINn COMIIK IIN2IN3COM2PLC IN4[N5LN6)AJ7PLC-2ovroCOMOOUT!OU12OUT3COMIOUT4OLT5OIJT6O(JT7COMOOUTOCOMIOUT1a)PLCCOM2ounCOM3OUT3b)图6-5L N | XO | X2 | X4 | X6 | X10 | X12 X14X16 i图6-4| 吉 UDIVl II KS xn I Kf X图6-7FX 系列PLC旋转编码器□DC24V\Q*L电潦+图6-9图6-8P 空站 :]冲]*1 | ¥2 ] : ] 丫4 | 年 1 : I 牛 | 三 | 盘匚I : [C 6MO [C 6MI |C 6IVIE | 届 |c6ivi 亍| V]石 忙6鵬|丫冇FU电湧 亡I 亡I rtTti nnnnfft出设备感性输出设备PLC豐出____ rw^ _____ __________ E>J _____VD T 感性输出设备___________ rwA __________PLC输a 出图6-10Y0Y1Y2Y3Y4 PLCY5CD4513e —I ♦—1CD4513ILcOHco1±XoXX7Xs动QI /罗…图 6-15b)c PLVD1H VD2N VD3母D4JYo Y2 OM c图6-18图6-19单歩回原位、1/单周期回原位厂手动一—连续松开左行上升起动电源(SB7)(SB1)夹紧右行下降停止惫停誌)(SB4)L3-9 H碎早辛土丁斟游沁師酿茅却至艸w軀圭公屈程序P0P1P2图6-221S00 2<10SET H1QK0K 1M0RST M10ZRST Ftfl M18RST Ml上升下隆左行右行!呼T严H4I [Mia _1严_1 卩is | pi|卩1.0 |严-pll——_|卩11 I严_| |E12 _|呼宀 _||町3 _|卩]_3 |严_| |H14 __________ |卩14 |产I?_|_| |Mg | |^11| p!6_______ T呻H卩iTpiL_i严i卜览T冲_1严丁阿_1严1严连缤X2/Hill710XI2M2rJll2哑厂冲用-------------- 夹紧牛严-------- 叵上升下隆上升M2rX10rXll CD下降Jzpai| p!6H RSTL SET左行右行松齐Y4回原位起动松开上升左行回康位停止图6-27图6-28图6-30FX JK*4KMR FX L^-4AD FX2N*16EX FX SN-2DA FX JN-32ER FX:N-4AD-TC XOOO X027特殊模Jft MHO 料殊檯块X050-X067YWP-Y027¥D3/¥3T图6-31图6-32将灿匚槻税的瞑剤码AUF 肿比塞出・忻存在IM 中匚 比轻识别码是否拘3U1O(FX-4AD),若呈则船为口阶^H?3C0^人舒朋0〔通道初始化)・CHK CH2H 夷电压输人,CH3 , CH4关闭*樓4写.\EFMII1和BKU 莊"CHI , CH2」;■■均民梅独臨 设为先tt FFIH 的中的错观信羸读到M. 5 -监0中*若役有嚣谒,则将HFK 麵和BPM 粕中内容(BOCHl相厂总的平卸直、左至DOfm I l图 6-33q hlOUp1DO|K4MlOO TOKI | Kir ; |K?Mir| KITOKII K17 |H0004| KI |TO Ki I K17 HOOOOf KL { TO ] KI [ K16 QI ―I TO I KI | K1F 血002帀_I TO | KI I Kl¥ HUOCKJI K 】 丿 ―| 丁0 | KI [ KM |K2MW0| 石I TO 」KI [KM IHOQD4[运ITO | KI 卩 |而000[ KI ―| TO ] KI | Klfi [JHIH 曲「初 ―I TO | KI | KM iHOOOll KI 、 碍IMO 厂鹤据怪送尹W 11E-S1OD^:将[閻临奴碼(tnmoc)写入EFX *16中】倩喇琥住娥据:将高4位数捱(M :. 11-K108)写入BFMM1S 中*民仃CEL 旳IV 戌轧换略D1C1中蠡据f 专送刮IIH 「"1DD 中; 將恢E 世归据'MlOT-MlMJSXEFMiiie 7!1!将高诳奴据(Mlll-mae)頁入EPMW16中t祇行CE 狛山"一转悭TO ] KI | K 卯 |HOOOD[ KI 丿忙ROM| 旳 K30 D4 KIXOOOH FXOO1图6-35x»oo[S订[52][S3][D] l-NG 8SPID DO D1DIOO DI50蛉定值(SV)屁氓储CPV)参数输出值(MV)图6-36xotYO□YCi亠一x Oi IshJ图6-38 Arraya) b)图6-39乐西红打J 南£斶IT T 南北蚩灯 启动」 南V 邀灯」 东酉绿灯H 乘函堇灯4 UUUU n 15s 15s 图 6-40 图 6-41333 SQ4 SQ5 5左行右行T E KK2 Kill -fib —— $厂 c: YVlf 上升1 \USQ2 下降| y c/LSQl iVZf 电磁殁盘YA b Q Q h bJLJ 图 6-42。