FLUTTER CLEARANCE FLIGHT TESTS OF AN OV-10A AIRPLANE MODIFIED FOR WAKE VORTEX FLIGHT EXPERI
flutter词根词缀

flutter词根词缀Flutter是一种跨平台的移动应用程序开发框架,它使用Dart编程语言。
Flutter的词根词缀可以帮助我们更好地理解Flutter的概念和功能。
Flutter的词根词缀1. Flutter的词根是“flut”,意思是“快速挥动”或“颤动”。
这个词根在Flutter中代表了框架的快速响应和高性能。
2. Flutter的前缀“re-”表示“再次”或“重新”。
在Flutter中,这个前缀通常用于重复执行某个操作,例如重新构建UI。
3. Flutter的前缀“dis-”表示“不”,“不完整”或“不正确”。
在Flutter中,这个前缀通常用于描述错误或不完整的操作。
4. Flutter的后缀“-able”表示“能够”,“可以”或“有能力”。
在Flutter中,这个后缀通常用于描述可重用的组件或可扩展的功能。
5. Flutter的后缀“-er”表示“更多的”或“更好的”。
在Flutter中,这个后缀通常用于描述更高级的功能或更好的性能。
6. Flutter的后缀“-ing”表示“正在进行中”。
在Flutter中,这个后缀通常用于描述正在进行的操作或动画。
7. Flutter的后缀“-ize”表示“使……化”。
在Flutter中,这个后缀通常用于描述将某个对象或组件转换为另一种形式或类型。
8. Flutter的后缀“-ment”表示“状态”或“过程”。
在Flutter中,这个后缀通常用于描述应用程序的状态或进程。
总结Flutter的词根词缀可以帮助我们更好地理解Flutter的概念和功能。
了解这些词根词缀可以帮助我们更好地理解Flutter的文档和代码,并更好地使用Flutter开发应用程序。
描述蝴蝶的生长过程 英语作文五年级

描述蝴蝶的生长过程英语作文五年级Butterflies go through a remarkable transformation in their lifetime. The life cycle of a butterfly begins with the egg stage. Female butterflies lay their eggs on the leaves of plants, and after a few days, tiny caterpillars hatch from these eggs. During the next stage, the caterpillar eats voraciously to grow and gain energy for its eventual transformation.After several weeks of feeding, the caterpillar will find a safe place to attach itself before entering the pupa or chrysalis stage. Inside this protective casing, the caterpillar's body undergoes a tremendous change as it transforms into a butterfly. It seems like an eternity, but after a couple of weeks, an adult butterfly emerges from the chrysalis.Once it emerges, it takes some time for its wings to dry out and harden before it can take flight. When fully ready, the mature butterfly spreads its wings and tests them patiently in preparation for its first flight into theworld.The entire process is nothing short of magical. From an egg to a crawling caterpillar and then to a beautiful butterfly that flutters gracefully from flower to flower - nature’s work at its finest. The life cycle of a butterfly is truly a fascinating journey filled with wonder and amazement!。
flutter 调用oc方法

flutter 调用oc方法Flutter是一种跨平台的移动应用开发框架,它可以让开发者用一套代码同时在iOS和Android平台上构建高性能、美观的应用程序。
然而,在某些情况下,我们可能需要在Flutter中调用Objective-C (OC)的方法。
本文将介绍如何在Flutter中调用OC方法,并提供一些实用的示例。
要在Flutter中调用OC方法,我们需要使用Flutter的platform channel机制。
这个机制允许Flutter和原生代码之间进行通信。
在Flutter中,我们可以使用MethodChannel来调用OC方法。
在Flutter中,我们可以使用以下步骤来调用OC方法:1. 在Flutter中创建一个MethodChannel对象,用于与OC代码进行通信。
我们可以在Flutter的Dart代码中使用如下代码创建一个MethodChannel对象:```MethodChannel _channel = MethodChannel('channel_name'); ```其中,'channel_name'是我们自定义的通道名称,用于在OC代码中识别和处理这个通道。
2. 在OC代码中实现与Flutter通道对应的方法。
我们可以在OC 的.m文件中使用如下代码实现一个方法:```- (void)handleMethodCall:(FlutterMethodCall*)call result:(FlutterResult)result {if ([call.method isEqualToString:@"method_name"]) {// 处理方法调用// ...// 调用Flutter的回调方法result(@"返回值");}}```在上述代码中,'method_name'是我们自定义的方法名,用于在Flutter中调用这个方法。
flutter canvas clear方法
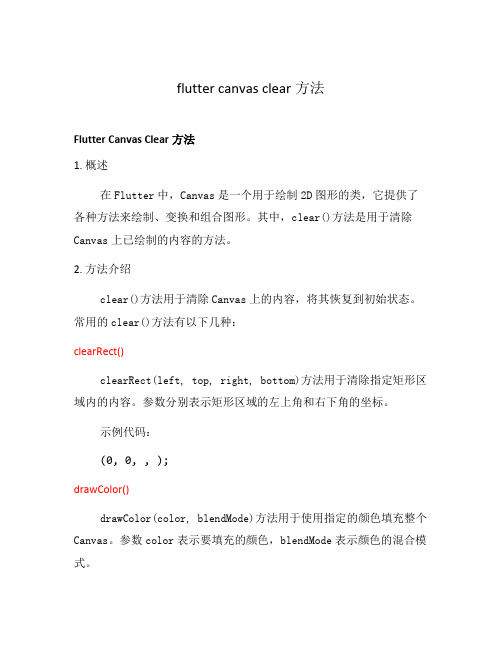
flutter canvas clear方法Flutter Canvas Clear方法1. 概述在Flutter中,Canvas是一个用于绘制2D图形的类,它提供了各种方法来绘制、变换和组合图形。
其中,clear()方法是用于清除Canvas上已绘制的内容的方法。
2. 方法介绍clear()方法用于清除Canvas上的内容,将其恢复到初始状态。
常用的clear()方法有以下几种:clearRect()clearRect(left, top, right, bottom)方法用于清除指定矩形区域内的内容。
参数分别表示矩形区域的左上角和右下角的坐标。
示例代码:(0, 0, , );drawColor()drawColor(color, blendMode)方法用于使用指定的颜色填充整个Canvas。
参数color表示要填充的颜色,blendMode表示颜色的混合模式。
示例代码:(, );save()和restore()save()方法用于保存当前Canvas的状态,包括变换矩阵和剪裁区域等。
restore()方法用于恢复到最近一次保存的状态。
示例代码:();// 进行绘制操作();saveLayer()和restore()saveLayer(bounds, paint)方法用于创建一个新的临时图层,并将后续的绘制操作限制在该图层内。
restore()方法用于恢复到上一次saveLayer()之前的状态。
示例代码:(, Paint());// 进行绘制操作();3. 使用建议在使用Canvas的clear()方法时,可以根据具体需求选择合适的清除方式。
如果只需要清除特定区域的内容,可以使用clearRect()方法;如果需要填充整个Canvas,可以使用drawColor()方法;如果需要保存和恢复Canvas的状态,可以使用save()和restore()方法;如果需要在一个临时图层上进行绘制操作,可以使用saveLayer()和restore()方法。
flutter 开发手册

flutter 开发手册摘要:1.引言2.Flutter 简介3.Flutter 开发环境搭建4.Flutter 基本概念5.Flutter 常用组件6.Flutter 布局与样式7.Flutter 状态管理8.Flutter 路由管理9.Flutter 与原生模块的通信10.Flutter 项目实战与优化11.Flutter 性能与调试12.Flutter 持续集成与部署13.Flutter 社区与资源14.Flutter 未来展望正文:Flutter 开发手册Flutter 是一款由Google 开发的开源UI 工具包,它可以帮助开发者使用一套代码库快速构建美观且高性能的Android 和iOS 应用程序。
本手册将为您提供Flutter 开发的全面指南,从入门到实战,助您快速掌握Flutter 开发的方方面面。
## Flutter 简介Flutter 是Google 推出的一个开源UI 工具包,它具有以下特点:- 使用Dart 语言开发- 热重载功能,提高开发效率- 高度可定制,支持灵活的UI 设计- 同时支持Android 和iOS 平台- 高性能,实现原生级别的渲染效果## Flutter 开发环境搭建要开始Flutter 开发,首先需要安装Flutter 开发环境。
本节将指导您完成以下步骤:1.安装Java JDK2.安装Android 开发环境3.安装iOS 开发环境4.安装Flutter SDK5.配置Flutter 开发环境## Flutter 基本概念在深入了解Flutter 开发之前,我们需要了解一些基本概念,如Widget、Element、RenderObject 等。
本节将为您详细解释这些概念,帮助您更好地理解Flutter 的运行机制。
## Flutter 常用组件Flutter 提供了丰富的组件库,涵盖按钮、文本、图像、列表等常用控件。
本节将介绍一些常用的Flutter 组件,以及如何使用它们来构建应用程序。
如何使用Flutter进行移动应用的端到端测试

如何使用Flutter进行移动应用的端到端测试移动应用的发展已经成为了现代生活的一部分,而作为移动应用开发者,我们可能会面临一个问题:如何保证我们开发的移动应用能够在各种不同的设备上运行良好?这就需要进行端到端测试来确保应用的质量和性能。
Flutter作为现在越来越受欢迎的跨平台开发框架,也提供了一套完整的端到端测试工具。
在本文中,我们将探讨如何使用Flutter进行移动应用的端到端测试。
一、什么是端到端测试端到端测试,顾名思义,就是从应用的一个端到另一个端的全面测试。
它模拟真实用户的操作,并验证应用在不同环境下的行为和功能。
通过端到端测试,我们可以确保应用在各种设备上的兼容性和可用性。
在Flutter中,我们可以使用Flutter自带的框架进行端到端测试,它提供了与用户交互、模拟用户操作、验证应用功能等相关的API,便于我们进行全面的测试。
二、如何进行端到端测试1. 配置测试环境在进行端到端测试之前,我们需要配置测试环境。
首先,我们需要在项目的pubspec.yaml文件中添加flutter_driver和test_driiver的依赖。
然后,在项目的根目录下运行flutter drive --target=test_driver/app.dart命令来启动测试驱动程序。
2. 创建测试脚本接下来,我们需要编写测试脚本。
测试脚本是用来模拟用户操作和验证应用功能的代码文件。
在Flutter中,可以通过使用flutter_driver包提供的API来进行测试。
首先,我们需要导入flutter_driver包,并创建一个FlutterDriver对象。
然后,我们可以使用driver.tap()、driver.enterText()等方法来模拟用户的点击和输入操作。
同时,我们还可以使用driver.waitFor()、driver.getText()等方法来验证应用的行为和输出。
在编写测试脚本时,需要考虑应用的各种交互和功能,并编写相应的测试用例。
flutter 校验规则
flutter 校验规则在 Flutter 开发中,校验用户输入是非常重要的一项任务。
校验规则能够帮助我们确保用户输入的准确性和合法性。
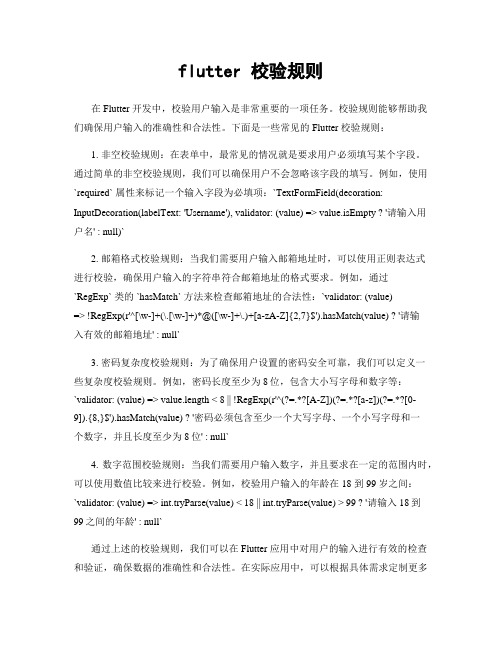
下面是一些常见的 Flutter 校验规则:1. 非空校验规则:在表单中,最常见的情况就是要求用户必须填写某个字段。
通过简单的非空校验规则,我们可以确保用户不会忽略该字段的填写。
例如,使用`required` 属性来标记一个输入字段为必填项:`TextFormField(decoration: InputDecoration(labelText: 'Username'), validator: (value) => value.isEmpty ? '请输入用户名' : null)`2. 邮箱格式校验规则:当我们需要用户输入邮箱地址时,可以使用正则表达式进行校验,确保用户输入的字符串符合邮箱地址的格式要求。
例如,通过`RegExp` 类的 `hasMatch` 方法来检查邮箱地址的合法性:`validator: (value)=> !RegExp(r'^[\w-]+(\.[\w-]+)*@([\w-]+\.)+[a-zA-Z]{2,7}$').hasMatch(value) ? '请输入有效的邮箱地址' : null`3. 密码复杂度校验规则:为了确保用户设置的密码安全可靠,我们可以定义一些复杂度校验规则。
例如,密码长度至少为8位,包含大小写字母和数字等:`validator: (value) => value.length < 8 || !RegExp(r'^(?=.*?[A-Z])(?=.*?[a-z])(?=.*?[0-9]).{8,}$').hasMatch(value) ? '密码必须包含至少一个大写字母、一个小写字母和一个数字,并且长度至少为8位' : null`4. 数字范围校验规则:当我们需要用户输入数字,并且要求在一定的范围内时,可以使用数值比较来进行校验。
flutter 打包时系统输出详细信息的命令

flutter 打包时系统输出详细信息的命令Flutter作为一种新的跨平台开发框架,已经得到了越来越广泛的应用。
然而,在打包Flutter应用的过程中,有时会出现一些问题,例如应用无法正确运行或者无法正常构建等等。
为了解决这些问题,我们需要在构建应用时获得更详细的输出信息。
在Flutter中,我们可以通过运行一些命令来获得这些详细的输出信息。
本文将一步一步介绍如何在Flutter中运行这些命令,以及如何解读这些输出信息。
一、为什么需要输出详细信息在打包Flutter应用的过程中,有时会遇到一些问题,比如:1. 应用无法正确运行2. 应用无法正常构建3. 构建应用时出现错误或异常这些问题的发生可能与应用开发的环境、Flutter版本或应用代码本身有关。
如果我们无法获得足够的详细输出信息来分析问题,我们将无法知道问题的原因,也无法解决问题。
因此,在打包Flutter应用时,输出详细的信息是非常重要的。
二、如何输出详细信息在Flutter中,我们可以通过在终端或命令行中运行一些命令来输出详细的信息。
以下是一些常用的命令:1. flutter run运行flutter run命令时,Flutter将会构建并运行应用程序。
如果应用程序无法正常运行,Flutter将会输出详细的信息,帮助我们诊断问题。
我们可以使用以下命令运行应用程序并输出详细信息:flutter run verbose2. flutter build运行flutter build命令时,Flutter将会构建应用程序并生成输出文件。
我们可以使用以下命令运行Flutter并输出详细信息:flutter build verbose3. flutter analyze运行flutter analyze命令时,Flutter将会分析应用程序的源代码并输出详细的分析结果。
我们可以使用以下命令分析应用程序:flutter analyze verbose4. flutter doctor运行flutter doctor命令时,Flutter将会检查应用程序运行所需的所有依赖项是否已正确安装。
flutter of方法

flutter of方法(实用版3篇)目录(篇1)1.Flutter 简介2.Flutter 方法概述3.Flutter 方法的具体使用4.Flutter 方法的优势与不足正文(篇1)【Flutter 简介】Flutter 是 Google 推出的一款开源 UI 工具包,它可以帮助开发者使用一套代码库快速构建美观且高性能的 Android 和 iOS 应用程序。
Flutter 采用了一种不同于原生开发的 UI 构建方式,它将界面和逻辑代码放在一起,提高了开发效率。
【Flutter 方法概述】在 Flutter 中,方法(method)是一种用于实现特定功能的代码块。
方法和函数类似,但它们通常用于响应用户交互或其他 Flutter 事件。
在 Flutter 中,方法可以被定义在 StatefulWidget 的 State 类中,也可以被定义在 StatelessWidget 中。
【Flutter 方法的具体使用】在 Flutter 中,方法通常用于处理用户交互,例如按钮点击、列表项选择等。
以下是一个简单的示例:```dartclass MyHomePage extends StatelessWidget {@overrideWidget build(BuildContext context) {return Scaffold(appBar: AppBar(title: Text("Flutter 方法示例"),),body: Center(child: TextButton(onPressed: () {// 在这里定义方法void showSnackBar() {ScaffoldMessenger.of(context).showSnackBar(SnackBar(content: Text("按钮被点击了!")), );}},child: Text("点击我"),),),);}}```在这个示例中,我们定义了一个名为`showSnackBar`的方法,它会在用户点击按钮时被调用。
使用Flutter进行移动应用界面的UI测试与验证

使用Flutter进行移动应用界面的UI测试与验证移动应用的界面设计对于用户体验至关重要。
在开发移动应用时,开发人员需要确保界面的稳定性和一致性。
为了验证移动应用的界面,在开发过程中进行UI 测试是必不可少的环节。
Flutter作为一种跨平台的移动应用开发框架,提供了一套方便易用的UI测试工具。
本文将探讨如何使用Flutter进行移动应用界面的UI测试与验证,帮助开发者更好地构建稳定和高质量的移动应用。
一、UI测试的重要性移动应用的用户体验直接决定了应用的成功与否。
一个优秀的用户界面应当具备直观、友好、易用和高效等特点。
为了确保应用的质量,开发人员需要对应用的界面进行全面测试。
UI测试旨在验证应用在各种情况下的界面交互和视觉效果是否正确、稳定。
通过UI测试,开发人员可以提前识别和解决潜在的界面问题,提升应用的质量和用户体验。
二、Flutter的UI测试工具Flutter提供了一套完善和易用的UI测试工具,开发人员可以基于这些工具构建自动化的UI测试用例。
Flutter的UI测试框架支持跨平台的应用程序,在Android和iOS设备上都可以执行测试。
通过Flutter的测试工具,开发人员可以模拟用户操作应用的各种场景,如点击、滑动、输入等,并验证应用的界面是否符合预期。
三、Flutter的UI测试工具使用示例以下是一个使用Flutter的UI测试工具进行界面验证的例子,以一个登录界面为例:测试用例1:验证登录界面步骤1:模拟用户打开应用Flutter提供了TestWidgetsFlutterBinding.ensureInitialized()方法用于初始化测试环境。
步骤2:定位并输入登录用户名和密码通过find.byType()方法和widget关键字可以轻松定位到登录界面的用户名和密码输入框,然后使用enterText()方法模拟用户输入。
步骤3:点击登录按钮使用GestureTapCallback()方法可以模拟用户点击登录按钮。
flutter用法
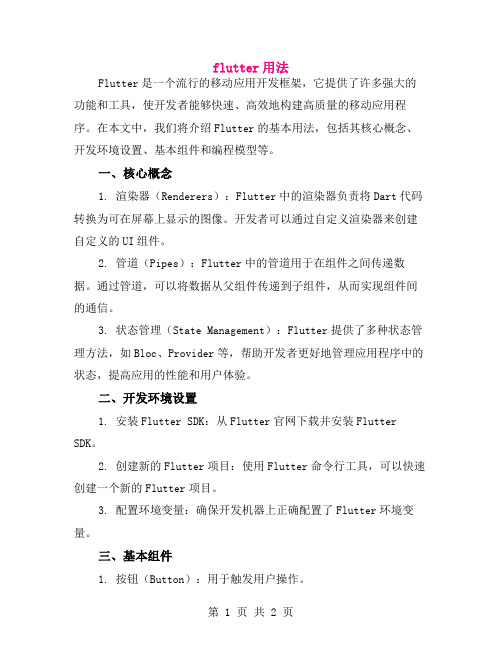
flutter用法Flutter是一个流行的移动应用开发框架,它提供了许多强大的功能和工具,使开发者能够快速、高效地构建高质量的移动应用程序。
在本文中,我们将介绍Flutter的基本用法,包括其核心概念、开发环境设置、基本组件和编程模型等。
一、核心概念1. 渲染器(Renderers):Flutter中的渲染器负责将Dart代码转换为可在屏幕上显示的图像。
开发者可以通过自定义渲染器来创建自定义的UI组件。
2. 管道(Pipes):Flutter中的管道用于在组件之间传递数据。
通过管道,可以将数据从父组件传递到子组件,从而实现组件间的通信。
3. 状态管理(State Management):Flutter提供了多种状态管理方法,如Bloc、Provider等,帮助开发者更好地管理应用程序中的状态,提高应用的性能和用户体验。
二、开发环境设置1. 安装Flutter SDK:从Flutter官网下载并安装Flutter SDK。
2. 创建新的Flutter项目:使用Flutter命令行工具,可以快速创建一个新的Flutter项目。
3. 配置环境变量:确保开发机器上正确配置了Flutter环境变量。
三、基本组件1. 按钮(Button):用于触发用户操作。
2. 文本框(TextFormField):用于接收用户输入。
3. 列表(ListView/GridView):用于展示列表或网格数据。
4. 图像(Image):用于显示图像。
四、编程模型1. 状态管理:使用Flutter提供的StatefulWidget和StatelessWidget构建应用程序的状态管理。
2. 路由:使用Flutter的RouteRecognizer进行路由管理,实现页面之间的跳转。
3. 插件系统:通过插件可以将第三方功能引入到Flutter应用程序中,提高开发效率。
五、性能优化1. 避免不必要的重绘:通过优化UI渲染器,减少不必要的重绘以提高性能。
flutter面试题汇总
flutter面试题汇总
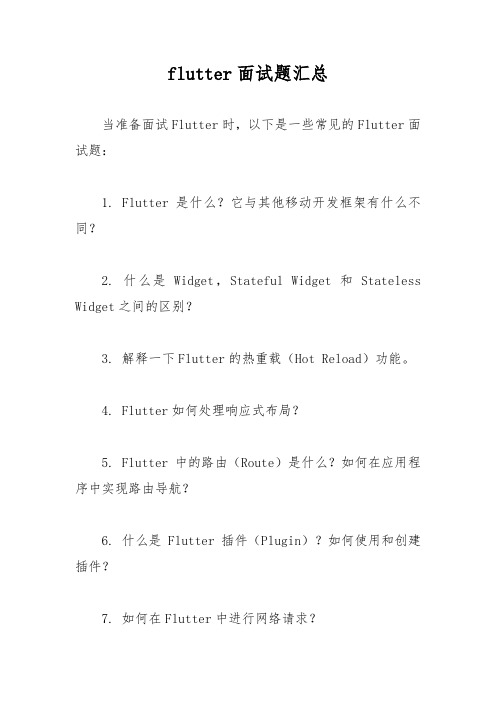
当准备面试Flutter时,以下是一些常见的Flutter面试题:
1. Flutter是什么?它与其他移动开发框架有什么不同?
2. 什么是Widget,Stateful Widget和Stateless Widget之间的区别?
3. 解释一下Flutter的热重载(Hot Reload)功能。
4. Flutter如何处理响应式布局?
5. Flutter中的路由(Route)是什么?如何在应用程序中实现路由导航?
6. 什么是Flutter插件(Plugin)?如何使用和创建插件?
7. 如何在Flutter中进行网络请求?
8. Flutter是否支持原生代码集成,并提供了哪些方法?
9. Flutter中的状态管理方案有哪些?请解释其中的一个。
10. 在Flutter中如何处理用户输入和手势操作?
11. 讲解一下Flutter中的动画和过渡效果。
12. 什么是异步编程,Flutter中如何处理异步操作?
13. Flutter如何进行本地存储和缓存数据?
14. 如何调试Flutter应用程序?
15. 你在Flutter中遇到的主要挑战是什么,以及你是如何解决它们的?
这些问题可以帮助你准备面试,并且可以检查你对Flutter的理解和经验。
确保你熟悉这些问题的答案,并根
据自己的经验进行扩展和解释。
同时,还要准备一些关于你在Flutter项目中的实际经验和技能的问题,以便面试官了解你的能力和潜力。
flutter开发桌面应用,最新精心整理Android面试题,已拿offer入职

flutter开发桌⾯应⽤,最新精⼼整理Android⾯试题,已拿offer⼊职Android没凉,只是⽐以前难混了多年前Android异军突起,成了新的万亿级市场,⽆数掘⾦⼈涌⼊,期待可以⼀展拳脚。
那时候⼤环境下的⼿游圈,只要你能有个可以运⾏的连连看就能找到⼯作,⾛上赛道被浪潮推着前进,这个⾏业不可谓不光明。
如今浪潮速度放缓,漫天飞舞着唱衰Android的讯息,“凉凉”是最多的字眼。
但放⼼,Android真的没凉!Android⼊门相对简单,初级Android很多很多,趋近饱和,你随意打开⼀个招聘app就能很直观的判断出来,现在Android准⼊的条件越来越⾼了。
正⽂1.图⽚的三级缓存中,图⽚加载到内存中,如果内存快爆了,会发⽣什么?怎么处理?参考回答:⾸先我们要清楚图⽚的三级缓存是如何的如果内存⾜够时不回收。
内存不够时就回收软引⽤对象2.内存中如果加载⼀张500X500的png⾼清图⽚.应该是占⽤多少的内存?参考回答:不考虑屏幕⽐的话:占⽤内存=500 * 500 * 4 = 1000000B ≈ 0.95MB考虑屏幕⽐的的话:占⽤内存= 宽度像素 x (inTargetDensity / inDensity) x ⾼度像素 x (inTargetDensity / inDensity)x ⼀个像素所占的内存字节⼤⼩inDensity表⽰⽬标图⽚的dpi(放在哪个资源⽂件夹下),inTargetDensity表⽰⽬标屏幕的dpi3.WebView的性能优化 ?参考回答:⼀个加载⽹页的过程中,native、⽹络、后端处理、CPU都会参与,各⾃都有必要的⼯作和依赖关系;让他们相互并⾏处理⽽不是相互阻塞才可以让⽹页加载更快:WebView初始化慢,可以在初始化同时先请求数据,让后端和⽹络不要闲着。
常⽤ JS 本地化及延迟加载,使⽤第三⽅浏览内核后端处理慢,可以让服务器分trunk输出,在后端计算的同时前端也加载⽹络静态资源。
flutter 校验规则

flutter 校验规则(原创实用版)目录1.Flutter 简介2.Flutter 校验规则的概念和作用3.Flutter 校验规则的分类4.Flutter 校验规则的使用方法5.Flutter 校验规则的示例6.Flutter 校验规则的优点和局限性正文1.Flutter 简介Flutter 是 Google 推出的一款开源的移动应用程序开发框架,可以用于开发 iOS 和 Android 平台的应用程序。
它具有快速、灵活、高性能和可定制性强等优点,因此受到了广大开发者的欢迎。
2.Flutter 校验规则的概念和作用在 Flutter 中,校验规则是一种用于验证表单字段的数据格式和范围的机制。
通过使用校验规则,可以确保用户输入的数据满足应用程序的要求,从而提高应用程序的质量和稳定性。
3.Flutter 校验规则的分类Flutter 中的校验规则主要分为以下几类:(1)必填项:用于确保表单字段不能为空。
(2)非空项:用于确保表单字段不能为空字符串。
(3)数字:用于确保表单字段只包含数字。
(4)字母:用于确保表单字段只包含字母。
(5)邮箱:用于确保表单字段符合邮箱地址的格式。
(6)电话:用于确保表单字段符合电话号码的格式。
(7)URL:用于确保表单字段符合网址的格式。
4.Flutter 校验规则的使用方法在 Flutter 中,可以使用`FormField`控件结合`Validator`类来实现校验规则。
以下是一个简单的示例:```dartFormField<String>(validator: (value) {if (value.isEmpty) {return "必填项不能为空";} else if (!value.matches("[A-Za-z]+")) {return "请输入字母";}return null;},builder: (FormFieldState<String> state) {return TextFormField(decoration: InputDecoration(labelText: "请输入字母"), onChanged: (value) {state.didChange;},);},)```5.Flutter 校验规则的示例假设我们要开发一个用户注册界面,其中有一个邮箱输入框,我们可以使用 Flutter 的校验规则来确保用户输入的邮箱地址格式正确:```dartFormField<String>(validator: (value) {if (value.isEmpty) {return "邮箱不能为空";} else if(!value.matches("[A-Za-z0-9._%+-]+@[A-Za-z0-9.-]+.[A-Z|a-z]{2,} ")) {return "请输入正确的邮箱地址";}return null;},builder: (FormFieldState<String> state) {return TextFormField(decoration: InputDecoration(labelText: "请输入邮箱"),onChanged: (value) {state.didChange;},);},)```6.Flutter 校验规则的优点和局限性优点:(1)Flutter 校验规则可以确保用户输入的数据格式和范围正确,从而提高应用程序的质量和稳定性。
使用Flutter进行移动应用UI测试的技巧

使用Flutter进行移动应用UI测试的技巧近年来,Flutter作为一种跨平台的移动应用开发框架,已经越来越受到开发者的关注和青睐。
它不仅提供了丰富的UI组件和动画效果,还具备高效的开发速度和良好的性能表现。
然而,在开发过程中,我们也需要对应用进行全面的测试,以保证其质量和稳定性。
本文将会介绍一些使用Flutter进行移动应用UI测试的技巧,帮助开发者更好地进行测试工作。
一、选择适合的测试工具在进行Flutter应用的UI测试时,我们可以选择使用一些流行的测试工具,如Flutter Test、Puppeteer、Appium等。
Flutter Test是Flutter官方提供的测试框架,它可以方便地编写单元测试和集成测试,并且可以模拟用户交互行为。
Puppeteer是谷歌开源的自动化测试工具,可以对Flutter应用进行端到端的测试。
而Appium则是一种用于移动端自动化测试的框架,支持Flutter应用的自动化测试。
二、编写可靠的测试用例在进行UI测试时,编写可靠的测试用例是至关重要的。
首先,我们需要确定测试的范围和目标,明确要测试的UI组件和功能。
其次,我们可以使用Flutter Test的测试框架编写各种类型的测试用例,包括单元测试、集成测试和UI测试。
在编写测试用例时,我们需要考虑各种可能的输入情况和边界条件,以确保覆盖所有可能出现的场景,并测试应用的稳定性和响应性。
三、模拟用户交互行为UI测试的关键在于模拟用户的交互行为,以验证应用的功能和用户体验。
在Flutter中,我们可以使用Flutter Test提供的工具和方法来模拟用户的点击、滑动、输入等操作。
例如,我们可以使用`tap`方法模拟用户点击一个按钮,使用`drag`方法模拟用户滑动屏幕。
通过模拟用户的交互行为,我们可以测试应用的各种场景和功能,以及各种设备和操作系统下的兼容性。
四、使用断言和验证结果在UI测试中,我们需要使用断言和验证结果来判断测试是否通过。
flutter 蒙层控件

在Flutter 中,蒙层控件通常用于为其他控件提供背景或附加样式。
蒙层可以用于显示图像、颜色或文本等。
以下是一些常见的蒙层控件:
1.Container:这是一个可以包含其他控件的容器,可以设置背景颜色、边框等
样式。
2.Positioned:这是用于在Stack 中的一个Positioned 组件的蒙层控件,可以
设置位置和大小。
3.Overlay:这是一个用于在屏幕上叠加层的蒙层控件,可以用于显示提示信息、
模态对话框等。
4.Row、Column、Grid:这些是用于排列控件的容器,可以通过设置间距、对
齐方式等样式来创建蒙层效果。
5.Transform:这是一个用于变换控件的蒙层控件,可以用于旋转、缩放、平移
等操作。
使用蒙层控件时,可以根据需要选择适合的控件,并设置相应的样式和属性。
例如,可以使用Container 控件来创建一个具有渐变背景色的蒙层,或者使用Overlay 控件来显示一个模态对话框。
flutter 常用命令

flutter 常用命令Flutter是一款热门的跨平台移动应用开发框架,它可以让我们在单个代码库中构建高性能、美观的应用程序。
在使用 Flutter 进行开发时,我们需要掌握一些常用命令,以便更高效地进行开发。
以下是一些常用的 Flutter 命令:1. flutter create使用此命令创建一个新的 Flutter 项目。
可以通过添加选项来指定项目的名称和位置。
2. flutter run使用此命令运行 Flutter 应用程序。
默认情况下,Flutter 会在模拟器上运行应用程序。
如果要在实际设备上运行,则需要将设备连接到计算机。
3. flutter devices使用此命令查看当前连接到计算机的设备列表。
可以使用此命令确定要在哪个设备上运行应用程序。
4. flutter doctor使用此命令检查 Flutter 开发环境的配置是否正确。
它将检查是否缺少任何依赖项,并提供修复建议。
5. flutter pub get使用此命令从 pub.dev 下载依赖项。
它将读取项目根目录中的pubspec.yaml 文件,并下载所有指定的依赖项。
6. flutter pub upgrade使用此命令更新项目中的所有依赖项。
它将读取项目根目录中的pubspec.yaml 文件,并下载所有可用的更新。
7. flutter clean使用此命令清除 Flutter 项目的构建缓存。
它将删除所有构建输出,并重建项目。
以上是一些常用的 Flutter 命令。
熟练掌握这些命令将使您的开发更加高效。
flutter技术要点

flutter技术要点
摘要:
1.Flutter 简介
2.Flutter 的优点
3.Flutter 的技术要点
4.Flutter 的应用案例
5.Flutter 的发展前景
正文:
Flutter 是一种开源的移动应用程序开发框架,由Google 开发。
它可以帮助开发人员通过一套代码库高效构建多平台精美应用,支持移动、Web、桌面和嵌入式平台。
Flutter 具有许多优点,例如快速开发、高保真、热重载等,使得开发人员可以更高效地完成应用程序的开发和迭代。
Flutter 的技术要点包括:
1.Dart 语言:Flutter 使用Dart 编程语言,具有简洁、易读、高效的特点,同时支持AOT 和JIT 编译,提高了应用程序的性能。
2.响应式框架:Flutter 采用响应式框架,可以实时响应用户的交互,提高了应用程序的交互体验。
3.热重载:Flutter 支持热重载,可以快速查看应用程序的更改,提高了开发效率。
4.丰富的组件库:Flutter 拥有丰富的组件库,可以帮助开发人员快速构建应用程序,同时也支持自定义组件。
5.多平台支持:Flutter 可以轻松构建跨平台的应用程序,支持Android、iOS、Web、桌面和嵌入式平台。
Flutter 已经广泛应用于移动应用程序的开发,例如Google Ads、Dropbox、Netflix 等公司都在使用Flutter 构建他们的应用程序。
flutter 运动轨迹纠偏算法

flutter 运动轨迹纠偏算法Flutter 运动轨迹纠偏算法在移动应用开发中,定位功能是非常常见的需求之一。
而随着定位技术的发展,对于定位数据的准确性和稳定性要求也越来越高。
但是,由于各种因素的影响,比如天气、建筑物、信号干扰等,所获取的定位数据可能会存在一定的误差。
这就需要对定位数据进行纠偏处理,以提高定位的准确性。
Flutter 是一种跨平台的移动应用开发框架,提供了丰富的工具和组件来创建高性能的移动应用。
在Flutter 中,我们可以借助第三方库来实现运动轨迹的纠偏算法。
一种常见的运动轨迹纠偏算法是基于地图匹配原理的。
该算法通过将定位数据与地图数据进行匹配,以消除定位数据中的误差。
具体的步骤如下:1. 数据预处理:首先,我们需要对定位数据进行预处理。
这包括数据的滤波、去噪以及去除异常值等操作。
通过这些操作,可以使定位数据更加平滑和准确。
2. 地图匹配:接下来,我们将预处理后的定位数据与地图数据进行匹配。
地图数据可以是现有的地图数据,也可以是通过地图服务获取的实时地图数据。
在匹配过程中,可以使用一些算法来计算定位数据与地图数据的相似度,并找出最佳的匹配结果。
3. 轨迹纠偏:根据匹配结果,我们可以对定位数据进行轨迹纠偏。
轨迹纠偏的目标是将定位数据调整为符合实际运动轨迹的数据。
常见的纠偏方法包括平滑轨迹、补齐缺失点、调整速度和方向等。
4. 结果输出:最后,我们将纠偏后的轨迹数据输出给应用程序进行展示或进一步处理。
可以将轨迹数据绘制在地图上,或者计算轨迹的总距离、平均速度等统计信息。
需要注意的是,运动轨迹纠偏算法并不是一种通用的解决方案,它需要根据具体的应用场景和需求进行调整和优化。
不同的应用可能对定位的准确性、实时性或者经济性有不同的要求,因此算法的选择和参数的调整也会有所差异。
在Flutter 中,有一些优秀的第三方库可以帮助我们实现运动轨迹纠偏算法。
例如,flutter_map 和 mapbox_gl 等库提供了地图展示和交互的功能;geolocator 和location 等库则提供了定位数据的获取和处理功能。
flutter 滑动控制算法

flutter 滑动控制算法Flutter滑动控制算法滑动是移动设备用户界面中常见的操作之一,如何实现灵活和流畅的滑动控制是开发者们面临的一个重要挑战。
Flutter作为一种跨平台的移动应用开发框架,提供了丰富的滑动控制算法,以帮助开发者实现高质量的滑动体验。
本文将深入探讨Flutter滑动控制算法,包括滑动检测、滑动距离计算和滑动动画等关键技术。
一、滑动检测在实现滑动控制之前,首先需要进行滑动检测,以确定用户是否正在进行滑动操作。
Flutter提供了GestureDetector类来帮助开发者进行滑动检测。
通过监听GestureDetector的onPanStart、onPanUpdate和onPanEnd等回调函数,可以获取到用户开始滑动、滑动中和滑动结束的事件信息。
在滑动检测中,了解滑动方向是非常重要的,Flutter提供了一个叫做DragDownDetails的类来获取用户手指滑动的起始位置。
通过比较起始位置和滑动过程中的位置变化,可以确定滑动方向是向上、向下、向左还是向右。
二、滑动距离计算在滑动控制算法中,滑动距离的计算是一个关键步骤。
用户滑动的距离可以通过计算两个点的距离来获得。
在Flutter中,可以使用Offset类来表示一个点,通过计算滑动过程中的两个点的距离,可以获取用户的滑动距离。
滑动距离的计算通常会受到一些限制,比如滑动的最小距离和最大距离。
在滑动距离的计算中,可以使用Clamp函数来限制滑动距离的范围,以确保滑动距离在可控范围内。
三、滑动动画实现滑动控制之后,下一步是实现平滑的滑动动画。
滑动动画可以通过Flutter中的Animation和AnimationController来实现。
Animation表示动画的状态值,而AnimationController则用于控制动画的运行和停止。
在滑动过程中,可以通过设置AnimationController的value来更新滑动动画的进度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FLUTTER CLEARANCE FLIGHT TESTS OF AN OV-10A AIRPLANE MODIFIED FORWAKE VORTEX FLIGHT EXPERIMENTSByRobert V. Doggett, Jr.; Jose´ A. Rivera, Jr.; and Eric C. StewartNASA Langley Research CenterHampton, VA 23681-0001SUMMARYEnvelope expansion, flight flutter tests of a modified OV-10A aircraft are described. For a wake vortex research program, the airplane was modified to incorporate three, forward-extending instrumentation booms, one extending forward from each wing tip and one from the right side of the fuselage. The booms are instrumented with sensors to measure the velocity and direction of local air flow. The flutter tests results show that the modified OV-10A aircraft is free from flutter at speeds up to 330 KEAS at 5000 feet altitude.INTRODUCTIONAs part of an ongoing research program to understand the effects of atmospheric characteristics such as turbulence and winds on wake vortex flows, NASA Langley has specially instrumented an OV-10A (NASA 524) airplane for use in flight research studies. Figure 1 is a photograph of this airplane.The OV-10 will be flown in airport approach and departure corridors with onboard instrumentation used to measure atmospheric characteristics. These data will be used to extrapolate independent atmospheric and vortex intensity data measured on the ground adjacent to the flight corridors. Both sets of data will be used to validate computer models of wake vortex decay and transport. The validated computer models will then be used to develop an operational Aircraft Vortex Spacing System (AVOSS). The AVOSS will be used to increase airport capacity by safely reducing landing and departure separations in most weather conditions. For these tests the OV-10A will not purposely penetrate vortices produced by other aircraft. It is expected that additional tests will be conducted where the OV-10 is flown into the wake produced by other aircraft and the characteristics of the wake determined. The response of the OV-10A to these wakes will also be measured.The modifications of the basic OV-10A included the addition of three instrumentation booms and an onboard instrumentation pallet. A large, graphite-epoxy boom extending approximately one chord length forward of the leading edge of the wing was installed on each wing tip. At the end of each of these booms is a pair of vanes as well as a pitot-static probe. One vane was oriented to measure angle of attack; the other vane was oriented to measure angle of sideslip. A third forward-extending boom was mounted to the right side of the fuselage near the nose. A 5-hole pressure probe was mounted on the forward end of this boom to measure flow angles and velocity. These three systems are necessary to measure the severe flow gradients found in vortex flows.The addition of the booms to the aircraft raised some concerns as to whether the airplane flutter characteristics might be affected. Consequently, it was decided to conduct envelope expansion flutter clearance flights as part of the aircraft functional check flights, with flutter clearance taking priority over functional checks. To this end the aircraft was instrumented with accelerometers to measure in flight dynamic response so that the flutter characteristics could be assessed. This report contains the results from these flutter clearance flights.AIRPLANE STRUCTURAL DYNAMIC CHARACTERISTICSNatural Vibration CharacteristicsSome ground vibration tests were conducted for the cantilevered booms, booms attached to the airplane, and for the airplane with and without the booms. (ref.1) Ground vibration test data for other OV-10 configurations were also available. (refs. 2 and 3)The natural frequencies of the booms are given in Tables I and II. Table I contains the data for the wind-tip boom; Table II contains the data for the nose boom. The natural frequencies of the wind-tip boom given in Table I were obtained for the boom cantilevered from a massive backstop and for the boom mounted on the airplane. The cantilevered fundamental frequency was 15.8 Hz in both the vertical and lateral directions. There were slight differences in frequency for the second bending mode in the two directions. The vertical frequency was 47.2 Hz and the lateral frequency was 49.6. When mounted on the airplane, the boom had a first bending mode frequency of 12.3 Hz. The frequencies of the mode that was primarily the second bending mode was 48.0 Hz in the vertical direction and 50.3 in the lateral direction.The natural frequencies for the nose boom, given in Table II, were only obtained for the boom mounted on the airplane. The frequencies of the first bending mode were 16.9 Hz in the vertical direction and 17.2 Hz in the lateral direction.The natural frequencies of the most prominent airplane modes are given in Tables III and IV. These data are for fully fueled conditions. The natural frequencies of the clean airplane are given in Table III. All of the available vibration data, refs. 1-3, was used to develop the annotated frequencies in this figure. The natural frequencies of the airplane with the booms attached are presented in Table IV. Again all of the available vibration data was used to develop the annotated frequencies presented in Table IV. The natural frequencies for configurations with less fuel were similar to those given in the table. The primary effect of reducing fuel loading was to increase the frequencies of the modes that contained a large amount of wing motion. For example, the frequency of the first wing bending mode for the clean airplane with one-half fuel was 8.75 Hz as compared to 8.5 HZ for the fully fueled condition.A comparison of the frequencies given in the various tables clearly shows that the primary effects of adding the booms to the airplane was to add additional modes to the spectrum rather than causing significantly changes to the basic airplane modes.Flutter CharacteristicsResults from previous flutter analyses and tests are not available for the OV-10A. Flutter analysis results are available, however, for an OV-10D (NOS) airplane which is a night observation version of the OV-10A. To create the OV-10D, the basic OV-10A was modified by adding additional electronics in an elongated nose, a M-97A gun system on the fuselage centerline, and new electronics in the cargo bay. The engine and propeller system were also upgraded.Calculated flutter results are presented in reference 4 for three OV-10D configurations. One of these configurations has the NOS equipment removed, which makes this configuration very similar to the OV-10A. The calculated flutter speed for this OV-10D was 432 KEAS at a frequency of about 16 Hz. The critical flutter mode was identified as horizontal stabilizer bending. Furthermore, there was a region of low, yet stable, damping predicted for a nominal 6 Hz fuselage mode in the 120-150 KEAS range. Because of the similarities of these two configurations, it is believed that the basic (unmodified) OV-10A under study here has flutter characteristics similar to those calculated for the OV-10D with the NOS equipment removed.INSTRUMENTATIONTwo accelerometers were installed on the left wing of the OV-10A to measure dynamic response of the airplane during the flight flutter tests. One accelerometer was mounted at the outboard end of the front spar, the other near the outboard end of the rear spar. Ground vibration tests results for this airplane (ref. 1), and previous ground vibration (refs. 2 and 3) and flutter results (ref. 4) for other OV-10 configurations indicated that accelerometers located at these two places would be sensitive to all modal vibrations important to flutter. This includes the previously mentioned horizontal tail bending mode which also contains a significant amount of wing bending motion.Two additional accelerometers were installed near the forward end of two of the instrumentation booms, one on the right-wing-tip boom and one on the fuselage-mounted boom. The accelerometer on the wing-tip boom was oriented to be primarily sensitive to motion in the pitch plane. The accelerometer mounted on the fuselage boom was rolled 45° to the left so that it would be sensitive to motion in both the pitch and yaw planes. Although these accelerometers were not installed explicitly for the flutter tests, they were monitored during the tests.DATA ACQUISITION AND DISPLAYAnalog signals from the four accelerometers were amplified, digitized, and recorded using equipment mounted on the instrumentation pallet in the airplane. The signals were also telemetered to a ground station where they were scaled to g units and converted to analog form for real-time display. The onboard tape recorder provided backup should the telemetry system fail. The tape was never needed in this investigation.The accelerometer signals were routed to a recording strip chart whose scale had been adjusted so that the signals levels could be reckoned directly in g units. The signals were also routed to a switching system that provided a means for any pair of signals to be analyzed by using a two-channel transfer function analyzer. This analyzer was used to obtain linear peak-hold spectra which are often used in flutter studies (refs. 5 and 6) The strip chart also had channels that displayed airspeed, altitude, aileron position, and time code. Another strip chart had channels that displayed heading, left rudder position, elevator position, airspeed, right alpha (pitch) vane, right beta (yaw) vane, normal acceleration and time code.In addition airspeed data were determined from onboard sensors and displayed in several forms at the ground test center. Airspeed was also available through pilotcallouts of the speed as read from his onboard instruments. Over the range of speeds and altitudes covered in this study, the pilot's indicated airspeed gage read approximate two knots below equivalent airspeed (KEAS). Consequently, the pilot's reading are interpreted herein as equivalent air speed values. As discussed in ref. 7, equivalent airspeed is the speed important to flutter. In the absence of significant compressibility and mass ratio effects the flutter speed expressed in KEAS is independent of altitude. This would be the expected case for the OV-10A.TEST PROCEDUREPrior to all taxi and flight tests the instruments where checked to see that they were working properly. For example, the tips of the booms were "plucked" to produce response in the first bending mode and the resulting accelerometer signal monitored.Prior to the initiation of flight testing, several taxi tests were conducted, ranging in speed from very slow to almost takeoff speed. The accelerometer signals were monitored on the strip chart and analyzed using the transfer function analyzer.Flight tests were conducted in two phases. The first phase was conducted in level flight. The aircraft speed was increased in increments until maximum level-flight speed was obtained. For the second phase, a sequence of dives was used to obtain higher speeds. For both phases the desired speed was reached at 5000 feet altitude. The accelerometer signals were continuously monitored during the flight tests.Atmospheric turbulence and pilot initiated aileron "raps" were used to excite the aircraft. The pilot executed the aileron raps either on command from the ground or at agreed upon points in the preplanned flight trajectory.RESULTS AND DISCUSSIONTaxi TestsPrior to the first flight test a series of taxi tests were conducted to examine wing and wing-boom response. The maximum taxi speed was slightly below takeoff speed. The maximum response was obtained as the airplane taxied across a cable that had been laid across the runway for other purposes. Both the wind-tip and fuselage booms responded primarily in their first bending modes, 12.5 and 17.5 Hz, respectively. The wing tip boom responded more than the nose boom, maximum of ±6.8 g's versus ±2.5 g's. The forward-mounted wing-tip accelerometer responded more than the aft mounted accelerometer, maximum of ±5.8 g's versus ±4.6 g's. All structural responses were well damped. All frequencies of response were consistentwith the ground vibration data. That is, dynamic structural responses only occurred at frequencies corresponding to identified natural frequencies of the airplane.Level Flight TestsFor the first flight test, after the taxi tests were completed, the integrity of the telemetry signals and the levels of the accelerometer signals were monitored as the airplane took off and circled the Langley Air Force Base runway while maintaining 100 KEAS with the landing gear down. Because no unusual structural response was observed and the telemetry system appeared to be working properly, the aircraft was cleared to proceed to the flight test area slightly to the west north west of Langley. Indeed, the structural response in the air was considerably less than that observed during taxi. The pilot retracted the landing gear and proceeded at a nominal 100 KEAS to the test area.Once on station, the pilot was instructed to gradually increase his airspeed to 120 KEAS. The response at this speed was very low level, not noticeably different from the response at 100 KEAS. The response was at such a low level that it raised concerns as to whether or not the accelerometers were functioning properly. Consequently, the pilot was instructed to return to the airfield for a touch-and-go landing to ensure that the instrumentation was working properly. The pilot returned and made the required landing. Because the acceleration response at touch down and during the ensuing ground run appeared to be normal, the pilot was instructed to affect a takeoff and return to the test area flying a speed no greater than 120 KEAS, which he did.The low level of response was due to the fact that there was very little atmospheric turbulence to excite the airplane structure. For the remainder of the tests, aileron raps were used in addition to turbulence to excite the structure. The pilot gradually increased the airspeed from 120 to 150 KEAS while performing a number of aileron raps. The data displayed on the strip charts were continuously monitored. Spectral data were obtained periodically using the transfer function analyzer. The structural responses produced by the aileron raps were well damped. All responses appeared to be well damped. There was no extraordinary increase in level or response as airspeed was increased. The frequencies of the various structural modes that participated in the response did not change.The aircraft, having been flutter cleared to 150 KEAS, the pilot performed some functional checks at lower speeds. These checks including engine shutdowns and propeller feathering, and cycling the landing gear. The structural response wasmonitored during these checks. No unusual response was observed. All responses were well damped.Once these functional check were completed, the flutter clearance testing was resumed. After stabilizing at 150 KEAS at 5000 feet altitude, the pilot gradually increased the speed to 200 KEAS while performing aileron raps as required by the flutter test engineers. No unusual response was observed. All responses appeared to be well damped. There was no extraordinary increase in response with increasing airspeed. The frequencies of the various structural modes participating in the response remained unchanged. There was no indication whatsoever that a flutter condition was being approached. Thus it was concluded that the airplane was flutter free to 200 KEAS.This flight was terminated because sunset was fast approaching. The aircraft returned to the airfield and landed without incident. Response data obtiined during taxi after landing were consistent with before flight taxi data.On the next working day, following preflight instrumentation checks and a short taxi test, the aircraft took off and returned to the flight test area to resume the flight flutter tests. The aircraft speed was gradually increased to 200 KEAS at 5000 feet altitude. During this increase in speed the accelerometer signals were monitored. The response obtained was similar to that obtained in the previous flight. The speed was gradually increased from 200 to 225 KEAS while the pilot did aileron raps and the accelerometer response was examined. No unusual response was observed. All responses appeared to be well damped. There was no extraordinary increase in response with increasing airspeed. The frequencies of the various structural modes participating in the response remained unchanged. There was no indication whatsoever that a flutter condition was being approached. The speed 225 KEAS was the maximum level flight speed of the airplane. Therefore, the airplane was flutter cleared to its maximum level flight speed.Diving Flight TestsTo flutter check at speeds higher than 225 KEAS it was necessary for the pilot to dive the airplane. The procedure was to take the plane to an altitude higher than 5000 feet, then put the airplane in a dive using maximum power so that the desired speed was reached at 5000 feet. When the desired speed was reached, the pilot performed an aileron rap. The accelerometer output signals were continuously monitored during the climb, the dive, and the following pull out. Five dives were made. The first started at 8000 feet and reached 250 KEAS at 5000 feet. The fourother maximum speed and starting altitude pairs were: 275 KEAS, 10,000 feet; 300 KEAS, 12,500 feet; 318 KEAS, 12,500 feet; and 330 KEAS, 12,500 feet. No unusual response was observed during these dives. Figure 2 is a reproduction of the strip chart recording of the response obtained for the 330 KEAS dive. Responses are given for the aft wing tip accelerometer, at the top in the figure, and the right wind-tip boom, at the bottom. The responses were relatively low level, of the order of 8 g’s for both responses, and well damped. There was no extraordinary increase in response with increasing airspeed. The frequencies of the various structural modes participating in the response remained unchanged. There was no indication whatsoever that a flutter condition was being approached.The 330 KEAS speed is the maximum dive this airplane was able to achieve. Therefore, the airplane modified with the instrumentation booms has been shown to be flutter free throughout its speed range at 5000 feet altitude.CONCLUSIONSResults from data obtained from envelope-expansion, flight flutter tests of the modified OV-10A show that the airplane is free from flutter at speeds up to 330 KEAS at 5000 feet altitude. Because flutter depends on equivalent airspeed, the airplane is flutter free at any altitude as long as 330 KEAS is not exceeded. (The previous statement assumes that there are no significant mass density and compressibility effects of the flutter speed, which would be the expected case here.) Flutter clearance to 330 KEAS is sufficient to ensure that the OV-10A will be free from flutter during the planned research flights.REFERENCES1.Faison, Richard W.: OV-10 Aircraft Modal Study. NASA Langley InternalMemorandum, January 21, 1994.2.Dunn, R. E.: Ground Vibration Tests OV-10A, Ship No. 2, Bu No. 152884. NorthAmerican Aviation, Inc., Report No. NA66H-673, October 3, 1966.3.Clevenson, S. A.; and Metcalf, V. L.: Structureborne Noise in Aircraft -- ModalTests. NASA Technical Memorandum 87739, July 1986. (Also available asUSAAVSCOM Technical Memorandum 86-B-3.)4.Wallace, D. R.: Flutter Analysis Report Of OV-10D (NOS) Aircraft. ColumbusAircraft Division, Rockwell International, Report No. NR76H-111, September 24, 1976.5.Ruhlin, D. L.; Watson, J. J.; Ricketts, R. H.; and Doggett, R. V., Jr.: Evaluation ofFour Subcritical Response Methods for On-Line Prediction of Flutter Onset inWind Tunnel Tests. Journal of Aircraft, vol. 20. no. 10, pp. 835-40, October1983.6.Doggett, Robert V., Jr.: Some Observations on the Houbolt-Rainey and Peak-Hold Methods of Flutter Onset Prediction. NASA TM 102745, November 1990.7.Hanson, P. W.: All You Ever Wanted to Know About Flutter but Were Too Smartto Ask! "Home Builders' Hall", Soaring, August 1977.Table I.- Natural frequencies in Hertz of wind-tip boom.(a) Cantilevered from rigid supportMode Frequency Comment115.7First bending247.2Second vertical bending 349.6Second lateral bending(b) On airplaneMode Frequency Comment112.3First bending248.0Second vertical bending 350.3Second lateral bending Table II.- Natural frequencies in Hertz of fuselage boom mounted on airplane.Mode Frequency Comment116.9First vertical bending217.2First lateral bendingTable III.- Natural frequencies in Hertz of clean airplane, no booms.Mode Frequency Comment1 5.5Coubled fuselage and tail booms 28.5First symmetric wing bending 414.0Wing-fuselage-empennage 318.1First antisymmetric wing bending 421.5Elevator bending527.5Asymmetric empennage633.5Coupled737.5Wing torsionTable IV.- Natural frequencies in Hertz of airplane with booms.Mode Frequency Comment1 5.5Coubled fuselage and tail booms 28.3First symmetric wing bending 312.3Wing-tip boom414.0Wing-fuselage-empennage 416.9Fuselage boom517.3First antisymmetric wind bending 621.5Elevator bending727.5Asymetric empennage833.5Coupled937.5Wing torsion11。