基于Matlab技术的4_RP_RR_R并联机构的运动仿真
4_RPRRR并联机器人运动仿真
V ( tn ) = A ( tn ) =
L ( tn ) - L ( tn - 1 ) tn - tn - 1 V ( tn ) - V ( tn - 1 ) tn - tn - 1
( 6) ( 7)
3 动态图形的仿真
1 引言
随着并联机器人的研究 ,少自由度并联机器人以其自由 度少 、 结构简单 、 经济 、 应用广泛等优点 ,研究进展很快 ,对并 联机器人 机构 的 仿 真 也 有 许 多 较 好 的 工 作 。 1996 年 , Y .
AM IRAT也给出了一个 6 自由度并联机器人的仿真 2002 年 ,黄真教授和李秦川
4 与 2 轴向平行 , 6 与 10 轴向平行 ; 12 为移动副 ; 3、 7、 9 为连
图 1 4 - RP( RR) R 机构
年 ,马履中给出了一个新型的 4 自由度机器人的仿真 [ 2 ] 。 给出了一个新型的 4 自由 度并联机器人机构 4 - RP (RR ) R。此后 ,郭希娟教授 [ 4 ]对此 机构的运动进行了分析 , 给出了机构的线速度 、 角速度和线 加速度 、 角加速度的性能指标 , 以及力与力矩的性能指标和 惯性力性能指标 ,并给出性能指标图谱 , 分析了机构参数对 机构的影响 。 本文在此反解分析的基础上进行了进一步的研究 , 用
机构的运 动 轨 迹 可 以用运动平台的中心点
( 3) P 的运动表示 。 根据此机
β Cz = D z - | DC | sin 得到 C 点的坐标 。 Β— 式中 — —CD 杆与工作平台的夹角
B 点坐标 : B = Cy ( | CA | - | AB | ) | CA | Cz ( | CA | - | AB | ) | CA | ( 4)
基于matlab的平面四杆机构动态仿真
基于matlab的平⾯四杆机构动态仿真摘要:本⽂基于matlab 强⼤的数值计算功能,借助fsolve 函数,建⽴了⼀个平⾯四杆机构模型,并对此进⾏运动仿真,为平⾯四杆机构的尺⼨优化设计和运动分析提供了⼀条简单实⽤的捷径。
关键词:平⾯四杆机构 matlab fsolve 函数1 背景介绍平⾯四连杆机构是⼯程应⽤中使⽤⼴泛的机械结构。
如果知道相应尺⼨下杆件的运动轨迹,速度⼤⼩,对整个机构的优化设计有重要作⽤。
Matlab 具有强⼤的科学计算机数据处理能⼒,出⾊的图形处理功能,且程序语⾔简单。
基于以上叙述,本⽂⾸先设计了平⾯四杆机构的各连杆参数,然后在matlab 环境下运⽤⽜顿-⾟普顿算法,使⽤fsolve 函数快速实现了运动仿真并以图形的形式将其运动情况显⽰了出来。
2 平⾯四杆机构的运动仿真2.1 ⽤matlab 进⾏⾓位移分析平⾯四杆机构如右图所⽰,4l 为机架,1l 为摇杆,2l 为连杆,3l 为摆杆,设杆长分别为20,mm50mm 35mm,60mm.,摇杆与机架夹⾓1?θ=,连杆与⽔平线夹⾓2δθ=,摇杆与机架夹⾓3ψθ=,且初始⾓度00o ?=,1θ⾓速度为10/rad s ω=。
则可将问题转化为,已知1θ的运动状态,求23,θθ。
由铰链四杆机构复向量坐标,可以写出⾓位移⽅程3121243j j j l e l e l l e θθθ+=+将上式展开,整理的1231122433223112233(,)cos cos cos (,)sin sin sin f l l l l f l l l θθθθθθθθθθ=+--=+-??由上式可知,在1θ给定的情况下建⽴了⼀个⼆元⽅程,通过matlab 联⽴⽅程组可求解出23,θθ。
2.1 ⽤matlab 进⾏⾓速度分析⽤matlab 进⾏速度分析对上式进⾏求导并整理成矩阵形式为1211223312233113sin()sin()sin()cos()cos()cos()l l l l l l θθθθθθθθθ-??-=-运动仿真的实现为了求得23,θθ,可调⽤matlabf 中fsolve 函数。
一种新型少自由度并联机构4-RPR(RR)及基础分析
式中 ; M一
机 构 的 自由度 ;
n —— 机 构 的 总 构件 数 ;
g —— 机构 的总运动副数 ;
^—— 第 i 运 动 副 的相 对 自 由度 } 个
— —
础, 因此 具 有 实际 的 价位 置 反 解 ; 度 分 析 4 R( R ; 速
中 图分 类 号 : P 4 . T 222 文献标识码 : A 文章 编 号 :0 1 2 5 【 0 6 O — 0 1 一O 1 0 — 3 4 2 0 )8 O 4 3
维普资讯
第2 3卷第 8 期
200 6年 8月
机
械
设
计
Vo . 3 No. 12 8
Aug .
2 6 00
J OURNAL OF M ACHI NE DES GN I
一
种 新 型 少 自由度 并 联 机 构 4 P R 及 基 础 分 析 一R R( R)
该机构不存在与所有运动 副都相逆 的公共 反螺旋 , 故 一 0 在 4个 约 束 反 力 中 , 在 2 虚 约 束 , 有 : , 存 个 故
M : 6× ( 8— 2 1 0— 1 )+ 2 O+ 2— 4
领域 的 拓 展 提 供 了 理 论 数 据 。
即 该 机 构 有 4个 自 由度 。
运 用 文 献 [ 3给 出 的 计 算 空 间 并 联 平 台 机 构 的 自 由 度 公 5
式, : 有
M—dn 一1+∑ ^ (—g )
‘ 1
() 1
由度 并 联 机器 人 来 讲 具 有 结 构 简 单 、 价 低 等 优 点 , 此 在 工 造 因
基于MATLAB的四杆并联机械臂工作空间仿真与分析
基于MATLAB的四杆并联机械臂工作空间仿真与分析作者:黄俊华田壮来源:《山东工业技术》2019年第20期摘要:目前在许多食品、机械加工等行业的自动化生产线上普遍存在抓取和分拣等大量的重复性工作,为了降低劳动成本,提高生产效率,实现高效益,提高生产的安全可靠性,推动并联机械手的发展非常有必要。
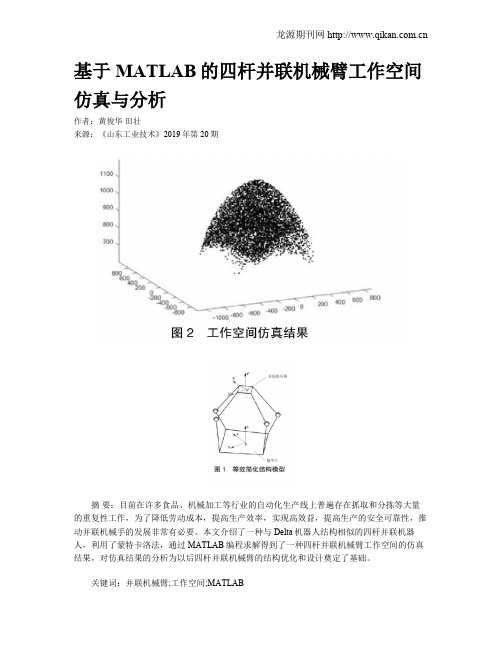
本文介绍了一种与Delta机器人结构相似的四杆并联机器人,利用了蒙特卡洛法,通过MATLAB编程求解得到了一种四杆并联机械臂工作空间的仿真结果,对仿真结果的分析为以后四杆并联机械臂的结构优化和设计奠定了基础。
关键词:并联机械臂;工作空间;MATLABDOI:10.16640/ki.37-1222/t.2019.20.1080 引言Delta型机器人有着闭环并联的拓扑结构,承载能力强、结构强度大、运动精度高,近年来国内外许多学者对Delta型的机械结构进行了研究,在其运动学正解、运动学反解、工作空间和运动轨迹规划等方面取得了许多成果。
本文研究了一种四杆并联机械臂,其结构特点与Delta并联机器人相似,四杆并联机械臂为冗余机构,稳定性得到了提高,适用于大负载、较复杂的工作环境,并联机械臂的诸多优点为其在工业自动化上的应用提供了广阔的发展前景,对四杆并联机械臂的工作空间仿真及分析对其未来的实际应用具有重要意义。
1 四杆并联机械臂的结构模型Delta并联机器人具有三个自由度,其基座平台和运动平台都呈等边三角形,有三个平行四边形机构。
本文研究的四杆并联机械臂与Delta并联机器人有相似之处,即都具有平行四边形机构,且执行机构都具有三个自由度,但四杆并联机械臂的基座平台(即静平台)和运动平台都呈正方形,有四个平行四边形机构,这是它们之间的不同点。
本文设计的四杆并联机械臂等效简化结构模型如图1所示。
2 四杆并联机械臂运动学分析对四杆并联机械臂的运动学分析是求解其工作空间的基础,包括运动学反解分析和运动学正解分析。
简单来说,运动学反解分析就是已知末端执行器的空间位置,求解并联机械臂各驱动电机所需的运动转角;运动学正解分析就是已知并联机械臂各驱动电机的转角,求解末端执行器所在的空间位置。
(完整)基于matlab的四杆机构运动分析

1平面连杆机构的运动分析1。
1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据.机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计.1。
2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b。
组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
1.3 机构的数学模型的建立1。
3。
1建立机构的闭环矢量位置方程在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。
如图1所示,先建立一直角坐标系.设各构件的长度分别为L1 、L2 、L3 、L4 ,其方位角为、、、.以各杆矢量组成一个封闭矢量多边形,即ABCDA。
其个矢量之和必等于零。
基于MATLAB的平面四连杆机构运动仿真

12端 点 B运 动分析 .
在 复 数 坐标 系 中 ,端 点 B的位 置 可 表 示 为 B ri,则 =2 ̄ e2
6
』Brn02 I =c2 I 2si O R 2s e o mB=r
速度分别为 :
( 5 ) 一
。
4
2
分 别 对 上 式 求 一 次 、二 次 导 数 ,得 到 B点 的 速 度 、加
[ ] 孙 桓 , 陈作 模 . 械 原 理 [ ] . 京 : 高 等 教 育 出版 社 1 机 M 北
2 0 . 0 6
( 转第 8 下 4页 )
1 00
5 0
>
一
5 0
。
10 0
图 4 交 替 反相 层 叠 下 相 电 压 波形 及 对 应 频谱
1 0. 0 0
lve i v re sa d DTC o rd v p lc t n .I E a so e l n etr n mo r e a p i ai s EE Tr n n i o
[ ] 刘风 君 ,多 电平 逆 变技 术及 其 应 用 [ ] , 京 :机 械 工 业 出 4 M 北
1 00 0 .
8 . 0O
.
5 0 0.
≮ 0
一
S O 0.
一
1 0. 0 0 0
^ 1 j f
1 0 2 0 0. 0. 3 0 400 0. . 500 6 0 . 0。
越
0 20 . 40 . 60 . 80 . 1 0 0.
t / ms
0
~
.
ll1 斟 s2 v t c西 m o2 B j
l 『 Is 一s i I 一 c ].∞ o h1 I l +s c o j
基于MATLAB的平面四连杆机构运动仿真.
图2~4分别为θ4角速度、点C的速度变化曲线。
4结论
本文在复数向量坐标系中推导了四连杆机构运动方程,并应用MATLAB软件进行了连杆机构运动数值仿真。从计算结果可以看出,该方法可以方便快捷地得到连杆运动参数,能够有效提高分析效率和计算精度,可进一步推广到多连杆机构设计及优化计算中。
文章编号:1009-9492(201104-0051-02
引言
四连杆机构因其结构灵活、能够传递动力并有效地实现预定动作,在很多领域得到了广泛应用
[1]
。进行连杆机
构运动分析,传统方法主要是图解法或分析法[2]
,无论设
计精度还是设计效率都相对低下,无法满足现代机械高速高精度的要求。随着计算机技术的飞速发展,特别是以
面四杆机构[J ].机械制造, 2002,
(3:26-28.
[3]周进雄,张陵.机构动态仿真[M ].西安:西安交通大学出
版社, 2002.
[4]李娟玲,张建峰.基于C语言的平面连杆机构的运动分析
[J ].机械研究与应用, 2006, 19(5:117-120.
[5]宋兆基. MATLAB6.5在科学计算中的应用[M ].北京:清
华大学出版社, 2005.
[6]王正林.精通MATLAB科学计算[M ].北京:电子工业出
版社, 2009.
[7]曹惟庆.机构设计[M ].北京:机械工业出版社, 2004. [8]李洪涛,徐巍华.基于MATLAB软件对抽油机连杆运动规律
的仿真研究[J ].机械工程师, 2009(5:99-101.
参考文献:
[1]孙桓,陈作模.机械原理[M ].北京:高等教育出版社,
2006.
基于matlab的平面四连杆机构设计以及该机构的运动分析参考模板
基于matlab的平面四连杆机构设计以及该机构的运动仿真分析摘要四连杆机构因其结构方便灵活,能够传递动力并实现多种运动形式而被广泛应用于各个领域,因此对其进行运动分析具有重要的意义。
传统的分析方法主要应用几何综合法和解析综合法,几何综合法简单直观,但是精确度较低;解析法精确度较高,但是计算工作量大。
随着计算机辅助数值解法的发展,特别是MATLAB软件的引入,解析法已经得到了广泛的应用。
对于四连杆的运动分析,若应用MATLAB 则需要大量的编程,因此我们引入proe软件,我们不仅可以在此软件中建立实物图,而且还可以对其进行运动仿真并对其运动分析。
在设计四连杆时,我们利用解析综合法建立数学模型,再根据数学模型在MATLAB中编程可以求得其他杆件的长度。
针对范例中所求得的各连杆的长度,我们在proe软件中画出其三维图(如图4)并在proe软件中进行仿真分析得出CB,的角加速度的变化,从而得到CB,两接触处所受到的力是成周期性变化的,可以看出CB,两点处的疲劳断裂,我们提B,两点处极易疲劳断裂,针对C出了在设计四连杆中的一些建议。
关键字:解析法 MATLAB 软件 proe 软件 运动仿真建立用解析法设计平面四杆机构模型对于问题中所给出的连架杆AB 的三个位置与连架杆CD 的三个位置相对应,即三组对应位置为:332211,,,,,ψϕψϕψϕ,其中他们对应的值分别为: 52,45,82,90,112,135,为了便于写代数式,可作出AB 与CD 对应的关系,其图如下:图—2 AB 与CD 三个位置对应的关系通过上图我们可以通过建立平面直角坐标系并利用解析法来求解,其直角坐标系图如下:φααi θi φi图—3 平面机构直角坐标系通过建立直角坐标系OXY ,如上图所示,其中0α与0φ为AB 杆与CD 杆的初始角,各杆件的长度分别用矢量d c b a ,,,,表示,将各矢量分别在X 轴与Y 轴上投影的方程为⎩⎨⎧=++=+)sin(*)sin(*)sin(*)cos(*)cos(*)cos(*φθαφθαc b a c d b a在上述的方程中我们可以消除θ,从而可以得到α与φ之间的关系如下:)cos(2)cos(2)cos(2)(2222αφαφab ac cd b d c a +-=+-++ (1) 为便于化简以及matlab 编程我们可以令:⎪⎪⎪⎩⎪⎪⎪⎨⎧==-++=c d H a d H ac b d c a H 32222212 (2) 通过将(2)式代入(1)式中则可以化简得到如下等式: )cos()cos()cos(321αφαφH H H +-=+ (3)我们可以通过(3)式将两连架杆对应的位置带入(3)式中,我们可以得到如下方程:⎪⎩⎪⎨⎧+-=++-=++-=+)cos()cos()cos()cos()cos()cos()cos()cos()cos(333332123222211311121ϕψϕψϕψϕψϕψϕψH H H H H H H H H (4) 联立(4)方程组我们可以求得321,,H H H ,再根据(2)中的条件以及所给定的机架d 的长度,我们可以求出其它杆件的长度为:⎪⎪⎪⎩⎪⎪⎪⎨⎧-++===1222322acH d c a b H d c H d a (5)四连杆设计范例:在日常生活中,我们经常看到消防门总能自动关上,其实它是利用四连杆机构与弹簧组成的。
基于MATLAB_fsolve函数的四连杆机构运动轨迹仿真

ypr3!3r4r2!4!2r1x图1基于MATLAB/fsolve 函数的四连杆机构运动轨迹仿真胡晓珍1,陈忠维2(1.浙江海洋学院,浙江舟山316000;2.公安海警高等专科学校机电系,浙江宁波315801)The Simulation of the Plane Four Links Mechanism Based on Fsolve Function of MATLABHU Xiao- zhen1,C HEN Zhon g- wei2(1.Zhejiang Ocean University,Zhoushan 316000,C hina;2.Public Security Marine Police Academy, Ningbo 315801, C hina)Abstract:The simulation of the plane four links mechanism on kinematics is carried on using fsolve function of MA TLAB, then the moving trail is gaved correspondingly. This means simulate the actual calculation process, and it has been proved that the means is easy to use and study, also have certain application value in the analysis of mechanism.Key words:the plane four links mechanism; simulation; MATLAB1 引言四连杆机构是工程上广泛应用的传动机构,常用的设计方法有解析法和图解法[1]。
实际工程中大多采用简单、直观的作图法进行设计,但作图法精度较低,同时当尺寸、参数变化时就得从头再作图,也无法对设计机构进行运动性能分析;而解析法需要大量的数据计算,计算过程繁琐且不直观。
基于MATLAB软件的铰链四杆机构运动分析仿真软件开发
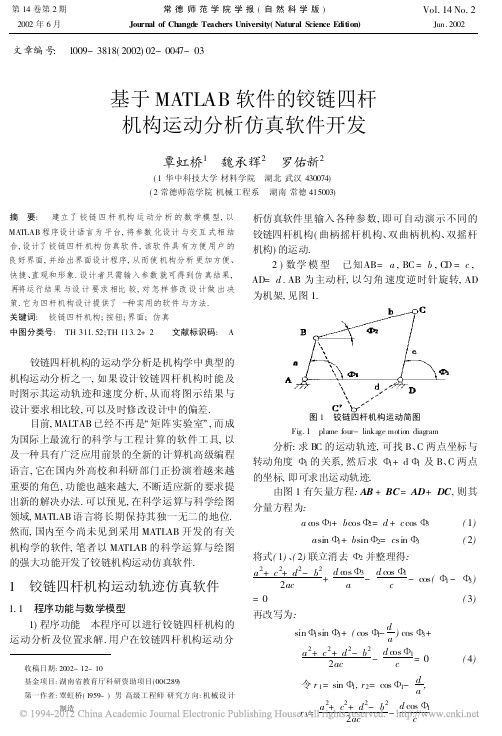
文章编号: 1009-3818(2002)02-0047-03基于MATLAB 软件的铰链四杆机构运动分析仿真软件开发覃虹桥1 魏承辉2 罗佑新2(1华中科技大学材料学院 湖北武汉430074)(2常德师范学院机械工程系 湖南常德415003)摘 要: 建立了铰链四杆机构运动分析的数学模型,以MATLAB 程序设计语言为平台,将参数化设计与交互式相结合,设计了铰链四杆机构仿真软件,该软件具有方便用户的良好界面,并给出界面设计程序,从而使机构分析更加方便、快捷、直观和形象.设计者只需输入参数就可得到仿真结果,再将运行结果与设计要求相比较,对怎样修改设计做出决策.它为四杆机构设计提供了一种实用的软件与方法.关键词: 铰链四杆机构;按钮;界面;仿真中图分类号: TH 311.52;TH 113.2+2 文献标识码: A铰链四杆机构的运动学分析是机构学中典型的机构运动分析之一,如果设计铰链四杆机构时能及时图示其运动轨迹和速度分析,从而将图示结果与设计要求相比较,可以及时修改设计中的偏差.目前,MALTAB 已经不再是/矩阵实验室0,而成为国际上最流行的科学与工程计算的软件工具,以及一种具有广泛应用前景的全新的计算机高级编程语言,它在国内外高校和科研部门正扮演着越来越重要的角色,功能也越来越大,不断适应新的要求提出新的解决办法.可以预见,在科学运算与科学绘图领域,MATLAB 语言将长期保持其独一无二的地位.然而,国内至今尚未见到采用MATLAB 开发的有关机构学的软件,笔者以MATLAB 的科学运算与绘图的强大功能开发了铰链机构运动仿真软件.1 铰链四杆机构运动轨迹仿真软件1.1 程序功能与数学模型1)程序功能 本程序可以进行铰链四杆机构的运动分析及位置求解.用户在铰链四杆机构运动分收稿日期:2002-12-10基金项目:湖南省教育厅科研资助项目(00C289)第一作者:覃虹桥(1959-)男高级工程师研究方向:机械设计制造析仿真软件里输入各种参数,即可自动演示不同的铰链四杆机构(曲柄摇杆机构、双曲柄机构、双摇杆机构)的运动.2)数学模型 已知AB=a ,BC =b ,C D =c ,AD=d .AB 为主动杆,以匀角速度逆时针旋转,AD 为机架,见图1.图1 铰链四杆机构运动简图Fig.1 plame four-linkage motion diagram分析:求B C 的运动轨迹,可找B 、C 两点坐标与转动角度51的关系,然后求51+d 51及B 、C 两点的坐标,即可求出运动轨迹.由图1有矢量方程:AB +BC =AD +DC ,则其分量方程为:a c os 51+b cos 52=d +c cos 53(1)a sin 51+b sin 52=c sin 53(2)将式(1)、(2)联立消去52并整理得:a 2+c 2+d 2-b 22ac +d c os 53a -d cos 51c -cos (51-53)=0(3)再改写为:sin 51sin 53+(cos 51-da)cos 53+a 2+c 2+d 2-b 22ac -d c os 51c=0(4)令r 1=sin 51,r 2=cos 51-d a ,r 2222第14卷第2期常德师范学院学报(自然科学版)Vol.14No.22002年6月Journal of Changde Teachers University(Natural Science Edition)Jun.2002则(4)化为:r 1sin 53+r 2cos 53=r 3(5)由三角恒等式求得:53=2arctg r 1?r 21+r 22-r 23r 2+r 3(6)式(6)两个解对应于机构的两种不同装配形式./+0对应于图1的实线,而/-0对应于图1的虚线.B 点坐标:B x =A x +a cos 51,B y =A y +a sin 51C 点坐示:C x =D x +c cos 53,C y =D y +a sin 53从运动杆的转角53,对时间求导可得DC 的角速度,由式(1)、(2)解出52按速度合成可求得BC 的转动角速度[2].1.2 程序框图以曲柄摇杆机构的运动仿真程度为例,程序框图如下:图2 程序框图Fig.2 Programming frame diagram1.3 程序代码采用MATLAB 开发图形界面,程序如下:%fourlinkages.mh_main=figure(.Units .,.normalized .,.Position .,[.3,.3,.5,.5],,.MenuBar .,.none .,.Name .,.四杆机构仿真.,.Number Title .,,.off .,.Resize .,.off .);h_axis=axes(.Units .,.normalized .,.Position .,[.12,.15,.6,.6],,.Tag .,.axPlot .,.Visible .,.on .,.XLim .,[-50,80<,.YLim .,-60,80]);h_text1=uicontrol (.Style .,.Text .,.Tag .,.myText1.,.Units .,,.normalized .,.Position .,[0.78,0.55,.05,.38],.String .,,.输入已知参数.,,.HorizontalAlignment .,.right .);h_te xt2=uicontrol(.Style .,.Text .,.Tag .,.myText2.,.Units .,,.nor malized .,.Position .,[0.15,0.90,.35,0.05],.String .,,.正在仿真,,OK !.,,.HorizontalAlignment .,.right .);a =20;b =50;c =40;d =50;fai =60;four_linkages0(a,b ,c,fai );%初始化图形h_edit1=uicontrol(.Style .,.Edit .,.Tag .,.myEdit1.,.Units .,,.normalized .,.Position .,[0.86,.85,.10,.1],.String .,.20.,,.HorizontalAlignment .,.right .);h_edit2=uicontrol(.Style .,.Edit .,.Tag .,.myEdit2.,.Units .,,.normalized .,.Position .,[0.86,.75,.10,.1],.String .,.50.,,.HorizontalAlignment .,.right .);h_edit3=uicontrol(.Style .,.Edit .,.Tag .,.myEdit3.,.Units .,,.normalized .,.Position .,[0.86,.65,.10,.1],.String .,.40.,,.HorizontalAlignment .,.right .);h_edit4=uicontrol(.Style .,.Edit .,.Tag .,.myEdit4.,.Units .,,.normalized .,.Position .,[0.86,.55,.10,.1],.String .,.60.,,.HorizontalAlignment .,.right .);h_list=uic ontrol(.Style .,.ListBox .,.Tag .,.myList .,.Units .,,.normalized .,.Position .,[0.78,.35,.20,.15],.String .,.正置|反置.,,.HorizontalAlignment .,.right .,.Value .,1);k=1;h_button1=uicontrol(.Style .,.PushButton .,.Units .,,.normalized .,.Position .,[0.78,.25,.2,.1],.String .,,.运动轨迹仿真.,.CallBack .,,.hd1=findobj(gcf,..Tag ..,..myEdit1..);.,,.a =eval(get(hd1,..String ..));.,,.hd2=findobj(gcf,..Tag ..,..myEdit2..);.,,.b =eval(get(hd2,..String ..));.,,.hd3=findobj(gcf,..Tag ..,..myEdit3..);.,,.c =eval(get(hd3,..String ..));.,,.hd4=findobj(gcf,..Tag ..,..myEdit4..);.,,.d =eval(get(hd4,..String ..));.,,48常德师范学院学报(自然科学版)2002年.kk =get(findobj(gcf,..Ta g ..,..myList ..),..Value ..);.,,.four_linkages(a,b,c,d,kk ).]);%调用回调函数轨迹仿真.h_button2=uicontrol(.Style .,.PushButton .,.Units .,,.normalized .,.Position .,[0.78,.15,.2,.1],.String .,,.角速度分析.,.CallBack .,.four_linkages1(a,b,c,d ,kk ).);h_button3=uicontrol(.Style .,.PushButton .,.Units .,,.normalized .,.Position .,[0.78,.05,.2,.1],,.String .,.退出.,.CallBack .,.four_linkages2.);%调用回调函数退出系统在主程序中有3个回调函数和一个初始化函数,回调函数分别用轨迹仿真、运动分析和退出系统.回调函数程序按前述数学模型编程(程序略);初始化函数用程序运行时初始化界面的图形.运行程序产生以下界面(图3).图3 程序运行界面Fi g.3 Programming Interface在界面中输入已知参数,则可生成相应的图形.当输入a =20,b =50,c =40,d =60,装配形式选取正置时,如果选运动轨迹仿真,则得仿真轨迹(图4);如果装配形式选反置,进行轨迹仿真(图5).(注:图4 运动轨迹仿真(装配形式正置)Fi g.4 Moti on track simulation(positiveset)图5 运动轨迹仿真(装配形式为反置)Fig.5 Motion track simulation (in reverse positive set)在图4、5中为节省篇幅,这两个图形只选了对应图3的图形部分,界面的其它部分未剪取.).而当选取装配形式进行轨迹仿真后,可再选角速度分析,得到连杆与摇杆的角速度图形(略).2 结论1)自动演示不同的四杆机构的运动,模拟仿真运动轨迹与从动件的速度分析,有助于分析机构的速度、加速程度和机构的工作性能;2)采用MATLAB 语言开发机构仿真运动分析软件,开发界面容易,运行程序时无需编辑、连接,给使用者以极大的方便.只要输入数据,即可得到结果.将运行结果与设计要求相比较,从而引导设计者修改设计.参 考 文 献1 薛定宇.科学运算程序MATLAB5.3程序设计与应用[M ].北京:清华大学出版社,2000.2 孟宪源.现代机构手册(上)[M].北京:机械工业出版社,1994.3 王沫然.Si mulink4建模及动态仿真[M].北京:电子工业出版社,2002.THE DEVELOPMENT OF EMULATIONAL SOFTWARE FOR ANALYSIS OF MOTION IN PLANE GEMEL FOUR -LINKAGEBASED ON MATLAB SOFTWAREQING Hong -qiao 1 WEI CH eng -hui 2LU O You -xin 2(1T he material institute,Cen tral China University of Science and T echnology,Wuhan Hubei,430074)(2Department of Mechanical Engineering,Changde Teachers University,Changde Hunan 415003)Abstract A mathematical model of motion analysis was estab -lished in plane four-linkage,and emulational software was deve-loped .The software adop ted Matlab5.3.1as a desi gn language.It combined parametric design with interactive design and had good in -terface for user.Thus,i t was fas ter and more convenient to analyse linkage.The emulational result was obtained as soon as input param -eters was imported and the devisers can make decision-making of modification by the comparing emulational result with design de -mand.It provides an applied software and method for linkage.Key words Gemel Four -Linkage;button;interface;emula -tion(责任编校:谭长贵)49第2期覃虹桥 魏承辉 罗佑新 基于MATLAB 软件的铰链四杆机构运动分析仿真软件开发。
MATLAB在并联机器人运动仿真中的应用
MAT LAB 在并联机器人运动仿真中的应用Application of MAT LAB in K inem atics Simulation of P arallel R obot梁师望(东华大学机械工程与自动化学院,上海,200051) 摘 要:对并联机器人的坐标分析进行了详细的讨论,然后用M AT LAB 实现了运动仿真。
按照要求的运动轨迹将并联机器人的运动全过程在计算机上直接显示出来,从而解决了运动可视化问题。
关键词:坐标分析 M AT LAB 运动仿真Abstract :Have a discussion about coordinate analysis of a parallel robot in detail.Then birng kinematics simulation to true with the help of M AT LAB.S o succeed in displaying the m ovement of a parallel robot on the screen according to its re 2quired track.K eyw ords :coordinate analysis M AT LAB kinematics simulation1 前言并联机器人是一种较新的机器人,它刚度大,承载性能好,精度高,可广泛应用于工业、航空、军事等领域[1]。
在以往的分析中,为了讨论它的性能,需要了解它的运动,但却很难直接观看它的运动过程。
本文运用MAT LAB 软件,成功地解决了并联机器人运动可视化问题。
只要运行文中的程序,便可以得到并联机器人的动画,并可以作任意角度的观察,还能消隐/非消隐,有利于全面掌握并联机器人的运动特性。
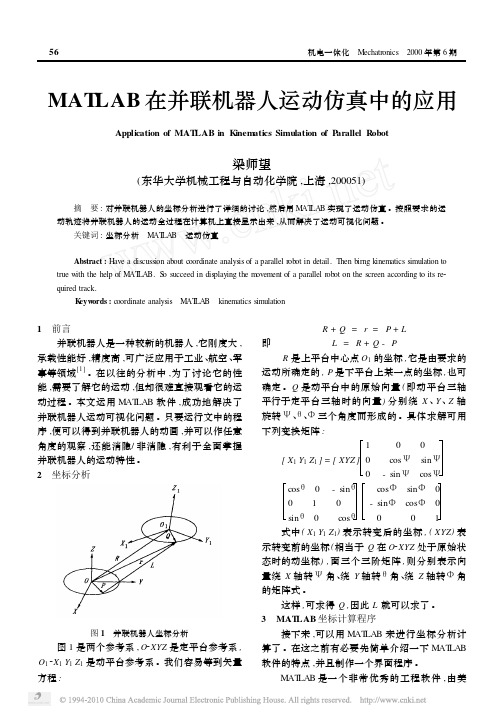
2 坐标分析图1 并联机器人坐标分析图1是两个参考系,O 2XYZ 是定平台参考系,O 12X 1Y 1Z 1是动平台参考系。
我们容易等到矢量方程:R +Q =r =P +L即L =R +Q -PR 是上平台中心点O 1的坐标,它是由要求的运动所确定的,P 是下平台上某一点的坐标,也可确定。
MATLAB的四杆机构运动学仿真方法

MATLAB的四杆机构运动学仿真方法
徐梓斌;闵剑青
【期刊名称】《林业机械与木工设备》
【年(卷),期】2007(35)5
【摘要】以四杆机构为例,研究在MATLAB中基于Simulink及SimMechnics工具箱的两种机构运动仿真方法,分别建立仿真模型进行仿真并得出了正确的结果,分析了两种仿真方法的特点.基于SimMechnics的仿真与基于Simulink的仿真相比,前者最大的优点是无需建立机构运动的数学模型和编制程序,能大大减少设计人员的工作量.通过仿真得出:MATLAB具有系统建模方便直观、仿真功能强大等特点,能为机械系统的建模仿真提供一个强大而方便的工具.
【总页数】3页(P40-42)
【作者】徐梓斌;闵剑青
【作者单位】浙江树人大学,浙江,杭州,310015;浙江树人大学,浙江,杭州,310015【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于MATLAB的平面四杆机构运动学分析 [J], 雷经发;扈静;魏涛
2.基于仿真软件对铰链四杆机构进行运动学分析 [J], 卢屹东
3.一种平面四杆机构的运动学分析 [J], 肖萍
4.基于VB的铰链四杆机构运动学分析 [J], 聂时君;岳舟
5.一种研究球面机构运动学的新方法——Ⅰ.基础理论与球面四杆机构的运动学研究 [J], 李璨;贾延龄
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MATLAB的平面四连杆机构运动学分析

一、课程设计容及要求:1.对连杆机构运动工作原理及运动参数有一定理解2.掌握MATLAB基本命令3.了解MATLAB编程的基本知识,并能编写简单M文件4.了解MATLAB图形界面设计的基本知识5.课程设计说明书:应阐述整个课程设计容,要突出重点和特色,图文并茂,文字通畅。
应有目录、摘要及关键词、正文、参考文献等容,字数一般不少于6000字。
二、主要参考资料有关复杂刀具参数计算及结构设计、机械制造工艺与设备的手册与图册。
三、课程设计进度安排指导教师(签名):时间:教研室主任(签名):时间:院长(签名):时间:目录1平面连杆机构的运动分析 (1)1.1 机构运动分析的任务、目的和方法 (1)1.2 机构的工作原理 (1)1.3 机构的数学模型的建立 (1)1.3.1建立机构的闭环矢量位置方程 (1)1.3.2求解方法 (2)2 基于MATLAB程序设计 (4)2.1 程序流程图 (4)2.2 M文件编写 (6)2.3 程序运行结果输出 (7)3 基于MATLAB图形界面设计 (11)3.1界面设计 (11)3.2代码设计 (12)4 小结 (17)参考文献 (18)1平面连杆机构的运动分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
基于MATLAB的平面四连杆机构运动仿真

基于MATLAB的平面四连杆机构运动仿真
刘龙;黎炯宏
【期刊名称】《机电工程技术》
【年(卷),期】2011(040)004
【摘要】利用复数向量推导平面四连杆机构的运动数学模型,应用MATLAB软件编程进行运动仿真分析,从而得到机构运动参数,为机构优化设计提供了一种高效、直观的仿真手段.
【总页数】3页(P51-52,84)
【作者】刘龙;黎炯宏
【作者单位】上海海事大学物流工程学院,上海201306;广州市珠江机床厂有限公司,广东广州511450
【正文语种】中文
【中图分类】TH112.1
【相关文献】
1.基于易语言的平面四连杆机构运动仿真 [J], 郑晓伟;罗亚波
2.基于MATLAB的平面四连杆机构的解析设计方法 [J], 贝天宝;林兴发
3.基于MATLAB运动仿真的平面多连杆机构优化设计 [J], 崔利杰;龚小平
4.基于MATLAB和ADAMS的四连杆机构运动仿真 [J], 任泽凯
5.基于matlab的平面四连杆机构优化设计 [J], 宋志强
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MATLAB实现平面四杆机构运动仿真
文章编号:1002-6886(2005)04-0050-03基于M AT LAB 实现平面四杆机构运动仿真王静文,刘舜尧,莫江涛(中南大学机电工程学院,湖南 长沙 410083) 作者简介:王静文(1977—),女,中南大学机电工程学院硕士研究生。
收稿日期:2005-3-18摘要:本文利用MAT LAB 软件实现平面四杆机构及其演化形式的运动仿真,为平面四杆机构的设计与分析提供一条便捷的途径。
关键词:平面四杆机构 运动仿真 MAT LABK i n e ma ti c S i m ul a ti on of Pl anar Four 2bar M echan is m Ba sed on M AT LABW ANG J i n g 2wen,L I U Shun 2rao,MO J i a ng 2t aoAbstract:This paper focus on the kine matic si m ulati on of p lanar four 2bar mechanis m and its evoluti ons with s oft w are MAT LAB ,which give another efficaci ous way f or the design and analysis of p lanar f our 2bar mechanis m.Key words:p lanar four 2bar mechanis m;kine matic si m ulati on;MAT LAB1 前言平面四杆机构是一类工程中广泛使用的典型运动机构,它的运动分析是机构学中典型的机构运动分析之一。
如果设计平面四杆机构时能及时图示其运动轨迹,从而将图示结果与设计要求相比较,可以使设计者及时修改设计中的偏差,提高设计效率。
目前,MAT LAB 已成为国际上最流行的科学与工程计算软件,它在国内外高校和科研部门正扮演着越来越重要的角色,功能也越来越强大。
基于Matlab的机构动力学仿真分析
1 r2 sinθ2
v3 x
r1ω1 sinθ1
0 - r2 cosθ2 ω2 = r1ω1 cosθ1
(11)
1 r2 sinθ2
a3 x
0 - r2 cosθ2 ε2 =
- r1ε1 sinθ1 - r1ω21 cosθ1 - r2ω22 cosθ2
r1ε1 cosθ1 - r1ω21 sinθ1 - r2ω22 sinθ2
如图 2 所示 。图中函数模块 sxh f1 是根据式 (9) 编
写的 M 函数对机构进行动力分析 ,计算约束反力和
力矩 。函数模块 sxh m1 、sxh m2 ,是根据式 (10) 、
式 (12) 编写的 M 函数对机构进行运动分析 ,计算加
速度 。工作阻力的方向随滑块速度方向变化而变
化 ,通过函数 sxh Fpx 来实现 。在仿真运行之前还 应确定图中 5 个积分器的初始条件。选择从 θ1 = 0 开始 ,则初始位置 θ2 = 0 , x3 = r1 + r2 ;ω1 = 100 radΠ s ,根据式 (10) 可求出速度初值 ω1 = - 20 radΠs , v3 x = 0 。最后设定仿真系统运行 0112 s ,机构运动约 2 个 循环周期 ,执行仿真命令 。仿真运动学结果保存在 矩阵 simout 中 ,动力学结果保存在矩阵 simout1 中 。
4 结语 液压支架设计阶段综合运用 CAE ,借助于三维
造型对液压支架进行有限元分析 ,运动仿真 ,动力学 分析 ,避免运动中的机构干涉现象 ,能够使设计中的 “虚拟样机”检验发挥强大作用 ,确保液压支架安全 可靠 ,结构优化合理 ,探索液压支架设计的新思路 , 提高液压支架设计水平 。
参考文献 : [1 ]赵慧设 ,等 1 基于 Internet 的三维模型协同浏览与批注系统 [J ]1
空间并联4-RPR(RR)机构的分析与仿真

由于机构仿真能够提供 直观 、 丰富的过程信息 , 且不受 场
地、 设备 、 资金等 的限制 , 能更有 利全面了解机构 的特性 , 机 是 构研究 中经济实 用的方法 。文 中选择 Wi o s00为操作 系 n w2 0 d 统 , Ma a 以 tb作为仿真 开发工具 , l 实现 了 4 P ( R机 构 的分 R RR )
【 = = , 0 24
联立 ( )( ) ( ) 4 、5 、6 可列 出 4组共 l 个方程 , 2 即可解 得各 支 链上的 C点坐 标值 。在 0一 y B点 的坐标可 由 A、 xz中 C求得 ,
则 L = C一 腑 Ii1 I 3
后, 就可 以利用上式求 出四个驱动器的位移。
维普资讯
《 装备制造技术)0 8 20 年第 2 期
空 间并联 4 R R 机 构 的分析与仿真 - R( P R)
高 翔’ , 宁淑荣
( . 山大学信息科学与工程学院 , 1 燕 河北 秦皇 岛 0 6 0 ;. 6 04 2山东大学威海分校 , 山东 威海 2 4 0 ) 6 2 0
值 仿 真 分析 的 理 论 研 究 结 论 的 正 确性 。 关 键 词 : 构 性 能 分析 ; 值 仿真 ; 机 数 实体 仿 真 中图 分 类 号 : 3 T 3 19 TH12; P 9 . 文献标识码 : A 文 章 编 号 :6 2 5 5 2 0 0 — 0 3 0 1 7 — 4 X( 0 8)2 0 1 — 4
CB s
O
C Ca
O
z p
l
4 P ( R机构简 图如图 1 示 , 一个 4自由度 的过 约 R RR ) 所 是 束并联平 台, 该机构是 由黄真教授【 出的。 - 提 由图可见该 机构共 有四个运 动支链 , 每个 支链有五个运动副。 且 在每一支链 中, 从 基座开始 , 第一个旋转副轴线平行于第三个旋转副 的轴线 。第 二个移 动副轴线相交且垂 直于相邻旋转副即第一 和第 三个旋 转副 的轴线。第四和第 五个旋转副轴线汇交于一个公共 点 , 由 R R表示 。 公共点 被叫做 中心点 , 为 M。 记 注意在所 有的四个 支 链 中, 四和第 五个 旋转 副的轴线都交 汇于同一点 M, 四个 第 且
4-CPS-UPU并联机构运动学分析与仿真
4-CPS-UPU并联机构运动学分析与仿真4-CPS/UPU并联机构运动学分析与仿真摘要:4-CPS/UPU并联机构是一种具有高精度和高刚度特点的平行机构,广泛应用于精密机械系统的设计与控制。
本文针对4-CPS/UPU并联机构进行了运动学分析与仿真研究。
首先,通过建立坐标系和定义坐标变量,推导出4-CPS/UPU并联机构的正运动学方程。
然后,基于正运动学方程,利用Matlab仿真工具,进行了4-CPS/UPU并联机构的运动仿真。
仿真结果表明,该并联机构的运动学性能良好,能够满足要求。
1 引言4-CPS/UPU并联机构是一种由4个可动关节连接的并联机构。
由于具有高精度和高刚度的特点,广泛应用于航天、机械制造和医疗设备等领域。
运动学分析是研究该机构的关节角度和末端位姿之间的关系,对于设计和控制具有重要意义。
2 4-CPS/UPU并联机构的正运动学分析2.1 坐标系和坐标变量定义首先,建立4-CPS/UPU并联机构的坐标系,包括基坐标系和末端坐标系。
然后,定义各个坐标变量,包括关节角度和末端位姿。
2.2 运动学方程的推导根据坐标系和坐标变量的定义,可以推导出4-CPS/UPU并联机构的正运动学方程。
其中,运动学方程包括坐标系之间的变换矩阵和坐标变量之间的关系。
3 4-CPS/UPU并联机构的运动仿真3.1 Matlab仿真工具介绍Matlab是一种常用的科学计算和仿真工具,具有强大的数值计算能力和可视化功能。
在本文中,利用Matlab对4-CPS/UPU并联机构进行运动仿真。
3.2 仿真过程首先,根据运动学方程的推导结果,编写Matlab代码进行运动仿真。
然后,设置初始条件和参数,运行仿真程序。
最后,分析仿真结果,得到并联机构的运动学性能。
4 仿真实验与结果分析通过Matlab仿真工具对4-CPS/UPU并联机构进行了运动仿真,并得到了仿真结果。
根据仿真结果分析,该并联机构的运动学性能良好,能够满足设计要求。
基于Matlab的并联机器人机构动力分析与动态仿真
现代电子技术Modern Electronics TechniqueDec.2021Vol.44No.242021年12月15日第44卷第24期0引言并联机构是一种具有多自由度,并通过驱动装置在不同环路上装配的机构,若将并联机构应用在操作器中,则称为并联机器人[1⁃3]。
并联机器人可以在工业、医用等多个领域广泛应用。
而并联机器人在使用和设计中,需要考虑到机器人的正逆运动解值的问题,正运动是通过对各驱动杆的运动,带动运动平台形成不同位姿;而逆运动则是通过运动平台带动驱动杆进行运动,在设计中对其运动学分析的方法通常为数值法和解析法[4⁃6]。
但单纯的机构动力分析方法所得出的计算结果精度不高,同时只能得出相关驱动杆的长度和运动速度,无法判断运动曲线。
而随着计算机技术的提高,各类仿真方法开始应用在机构运动学领域,弥补了之前的DOI :10.16652/j.issn.1004⁃373x.2021.24.039引用格式:乔栋,谢亚龙,李博文,等.基于Matlab 的并联机器人机构动力分析与动态仿真[J].现代电子技术,2021,44(24):182⁃186.基于Matlab 的并联机器人机构动力分析与动态仿真乔栋1,谢亚龙1,李博文1,姚涛2(1.山西大同大学,山西大同037009;2.河北工业大学,天津300401)摘要:在当前的机器人机构动力分析方法以及相关仿真工作中,仅能对机器人的单一运动方向进行仿真,若变换方向则需重新建立模型,导致其仿真精度低、效率差。
因此,文中提出基于Matlab 的并联机器人机构动力分析与动态仿真。
首先建立并联机器人的数学模型,以确定机器人运动机构的运动初始位置及其坐标;其次根据拉格朗日方程获得机器人的动力平台相关参数,并对其进行动力平台分析,根据获取的参数分析结果进行机器人的运动描述。
最后将上述内容作为仿真基础,导入Matlab 软件中,实现动态仿真。
为了验证设计方法的可行性,使用该方法对某型号的并联机器人进行仿真实验。
基于matlab的串并联谐振电路
基于matlab的串并联谐振电路基于Matlab的串并联谐振电路引言:串并联谐振电路是电路中常见的一种重要电路结构,它在通信系统、射频电路和电源电路等领域有着广泛的应用。
本文将介绍基于Matlab的串并联谐振电路的相关知识和实现方法。
一、串联谐振电路串联谐振电路是指电感、电容和电阻依次连接形成的电路。
在串联谐振电路中,电感和电容起到谐振的作用,电阻则用于限制电流。
当电感和电容的谐振频率与输入信号的频率相等时,电路会出现共振现象,电路的阻抗最小。
在Matlab中,可以使用电路分析工具箱来模拟和分析串联谐振电路。
首先,根据电路的参数,使用电路分析工具箱中的函数构建电路模型。
然后,可以通过设置输入信号的频率,使用频域分析工具进行分析。
通过绘制电路的幅频特性曲线,可以直观地观察到电路的共振频率和阻抗变化情况。
二、并联谐振电路并联谐振电路是指电感、电容和电阻并联形成的电路。
在并联谐振电路中,电感和电容同样起到谐振的作用,电阻用于限制电流。
当电感和电容的谐振频率与输入信号的频率相等时,电路会出现共振现象,电路的阻抗最大。
在Matlab中,同样可以使用电路分析工具箱来模拟和分析并联谐振电路。
根据电路的参数,构建电路模型,并设置输入信号的频率。
通过频域分析工具,可以绘制电路的幅频特性曲线,从而观察电路的共振频率和阻抗变化情况。
三、串并联谐振电路串并联谐振电路是由串联谐振电路和并联谐振电路组合而成的电路结构。
在串并联谐振电路中,电感、电容和电阻的组合形式更加复杂,但其共振原理与串联谐振电路和并联谐振电路相似。
在Matlab中,可以通过将串联谐振电路和并联谐振电路的模型进行组合,来模拟和分析串并联谐振电路。
根据电路的参数和拓扑结构,构建电路模型,并设置输入信号的频率。
通过频域分析工具,可以绘制电路的幅频特性曲线,以及观察电路的共振频率和阻抗变化情况。
结论:基于Matlab的串并联谐振电路模拟和分析是一种常见的电路设计方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
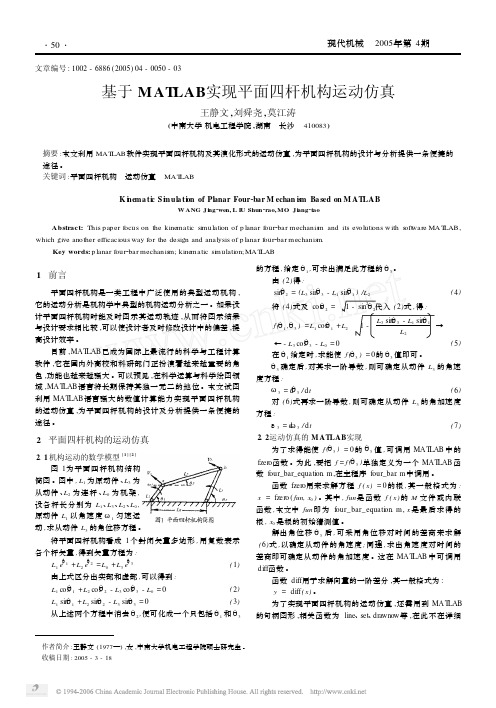
基于Matlab技术的4-RP(RR)R并联机构的运动仿真王 艳 钱月霞(常州机电职业技术学院 江苏 常州 213000)摘 要: 并联机器人是一类全新的机器人,它具有刚性大、承载能力强、加速度大、控制容易等一系列优点,对一种新型的4自由度并联机构4-RP (RR )R 进行机构分析,通过公式推导其运行轨迹,测算该并联机构能够运动到的位置,并通过Matlab 软件进行该机构的运动仿真研究,进一步证实推导数据,对4-RP (RR )R 机构性能的进一步分析提供可靠依据。
关键词: 并联机器人;自由度;Matlab ;仿真中图分类号:TP2 文献标识码:A 文章编号:1671-7597(2011)0110173-020 引言机构的运动输入时,工作平台可以沿X ,Y ,Z 三个方向平移,且可以绕Z 轴转动。
在研究本机构时,我们把工作平台的中心点P 在O-xyz 坐标系下的坐标设机器人是现代科学技术发展的必然产物,因为人们总是设法让机器为(0,0,10.8),且没有相对Z 轴转动时的位形作为机构的初始位形[4]。
来代替人的繁重工作,从而发明了各种各样的机器。
机器的发展和其他机构尺寸初始值为:固定平台边长为15cm ;工作平台长12cm 、宽9cm ;杆件事物的发展一样,遵循着由低级到高级的发展规律,机器发展的最高形3长为7cm ,杆件7长为8cm ,杆件9长为6cm 。
各支链中的杆件3皆与工作平台式必然是机器人。
呈120度。
现今的机器人正向第三代智能机器人方向发展,这将极大的拓展机因此我们不妨设机构工作平台中点P ,在O-xyz 坐标系下的坐标为(Px ,器人的应用场合和提高产品质量。
在串联机器人发展方兴未艾时,澳大Py ,Pz ),及工作平台相对Z 轴的旋转角度为α,这样整个机构的位形就确利亚著名机构学教授Hunt 在1978年提出6自由度的Stewart 平台机构作为定了。
具体方法如下:因为四个支链机构相同,所以这里我们只以第一支链机器人机构,也就是并联机器人。
为例,其它支链求法与之类似。
首先:利用给出的P 点的坐标(Px ,Py ,1 4-RP(RR)R机构分析Pz ),以及转角α。
确定图中D 点的坐标:在本论文研究中,提出了一个新型的4自由度的并联机器人机构4-RP (RR )R 进行分析,见图1。
图1 4-RP (RR )R 并联机构4-RP (RR )R 机构是一个过约束机构,本文利用虚设机构法,求出此机构的运动反解,仿真出其运动轨迹,确定此机构的工作空间[1]。
通过对4-RP (RR )R 机构的位形分析,联立方程组,求出4-RP (RR )R 机构工作平台各点的参数,然后用Matlab 的绘图功能,实现其仿真运动[2]。
4-RP (RR )R 机构为空间并联对称机构,该机构由一个固定平台11、一个工作平台1及四个支链构成。
固定平台11为正方形,工作平台1为矩形。
图中有字符标注的一列为第一支链,其它三个支链从俯视角度按逆时针方向排列,分别为第二、三、四支链。
这四个支链的机构形式相同。
在图中表示的O-xyz 坐标系中,以第一支链为例:运动副2、10为转动副,分别被固定在工作平台1及固定平台11上,运动副2的轴向与Z 轴平行,运动副10的轴向与X 轴平行;运动副5为万向铰(虎克铰),等效分解为两个4和6轴向互相垂直的转动副,其中4与2轴向平行,6与10轴向平行;12为移动副;3、7、9为连杆,分别为DC 、CB 、BA[3]。
2 4-RP(RR)R机构仿真数据准备通过对该机构进行分析,我们知道当四个支链以移动副的移动作为式中:W-工作平台的宽;L-工作平台的长。
通过固定平台边长找到A 点的坐标:联立方程组得到C 点的坐标。
式中: -Cd 杆与工作平台的夹角;L1-固定平台的边长。
3 4-RP(RR)R机构运动仿真由于Matlab 本身占用很大的内存空间,因此为了不影响仿真效果及综合因素的考虑,在本仿真过程中,选择占用内存较少的实时动画方式[5-6]。
由于并联机构是用反解的方法求出机构位置的,所以要求出机构各点的位置,先由工作平台中心点位置(Px ,Py ,Pz )求出C1mp ,C2mp ,C3mp ,C4mp 的值,又因为杆件3和工作平台的夹角是120度,所以又可以求出C1t ,C2t ,C3t ,C4t 的数值,又因为杆件7和杆件9之间没有旋转,它们是移动副,因此杆件7上端的位置始终在Y 轴上,因此C1t 的值是唯一确定的,同理可以求出C2t ,C3t ,C4t 的数值。
因为杆件9的长度为6cm ,杆件9的上端也只能在Y 轴上运动,因此可求出C1p ,C2p ,C3p ,C4p 的数值。
仿真运动的实现过程实际上是通过方程组不断的求解,得出不同的位置,然后根据这些数据绘制出相应的图形,由于并联机构的正解很难求出来,因此,采用求反解的方法,即先给定工作平台中心点坐标,然后求出此时的机构位置和移动副的输入参数,在此机构的仿真运动中,先给定工作平台中心点的坐标范围Px :-1cm ~1cm ,Py :-1cm ~1cm ,Pz :15cm ~20cm 。
然后根据这些数据算出相应位置下的各个参数的数值,在这过程中,圆柱体和球面的值很容易设置,只要把新算出来的各点的坐标值赋给圆柱体和球面的坐标值就能实现,而长方体赋值方式不一样,前面已经介绍过,绘制长方体的时候需要8个顶点的坐标值,而重新赋值的时候需要赋6个面,即24个顶点的坐标值,具体赋值方法如下例,如果将参数X 坐标、Y 坐标、Z 坐标指定为矢量,则Matlab 将特定的点连接从而绘制一个多边形。
如果此处的坐标参数不是矢量,而是矩阵,则Matlab 将根据该矩阵的每一列绘制一个多边形,从而生成一个多面片块对象。
除此之外,我们还可以以每个顶点的坐标及其连接为多边形时的排列顺序。
如图2:图2 多面片块对象图4 4-RP (RR )R 并联机构运动仿真界面首先指定X 、Y 和Z 轴。
在该立方体的六个面中,每个表面均包含四个顶点。
因为Matlab 自动闭合表面多边形(也就是说,该多边形的起始点和终止点不必相同),所以可以用一个4×6的矩阵来定义该立方体各个表面顶点的X 、Y 和Z 轴,如图3:参考文献:[1]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].机械工业出版社,1997.[2]李海涛,邓樱.Matlab 基础及应用技巧[M].机械工业出版社,2007.[3]郭希娟.并联机器人机构动力学基础理论研究[D].燕山大学,2002.[4]马履中,尹小琴,杨廷力.新型三平移并联机器人机构动力分析与动态仿真[J].农业机械学报,2007,3.[5]刘永红等.机器人实时动画仿真[J].计算机辅助设计与图形学报,2006.[6]薛定宇,陈阳泉.基于MATLAB/Simulink 的系统仿真技术与应用[M].清华大学出版社,2007.[7]焦恩璋.机器人运动仿真研究[J].计算机辅助设计与图形学报,2007.图3 各个表面顶点数据[8]杨明等.Windows 环境下机器人三维实时动画仿真[J].计算机工程与应由于此机构是用反解求出运动轨迹的,因此在数据显示区域主要显用,1999.示移动副的输入数据和工作平台中心点的坐标,这样用户可以很方便地[9]罗青等.足球机器人仿真系统的研究与开发[J].计算机仿真,2005.知道在什么样的输入情况下得到与其相应的工作平台位置[7-10],如图[10] Li Xie, D Xue and S K Tso, On the Two-Degree-of-Freedom Wiener-Hopf Optimal Design with Tracking and Disturbance Rejection 4所示。
Constraints, Automatica,36, 1897--1904, 2006.4 结论整个仿真过程能正确地模拟出4-RP (RR )R 并联机构的运动过程,在所有给出的点中,没有发现奇异点,也就是说这些点的位置,此机构都作者简介:能到达。
此仿真运动真正起到了检验的功能,为下一步分析4-RP (RR )王艳(1980-),女,讲师,研究方向:电子技术;钱月霞(1982-):女,R 并联机构的其他性能提供了依据。
助教,研究方向:电子技术。
9)系统管理模块由物资维护、地区维护、人员维护和日志管理4个子量功能还没有开发完成,需要在今后的工作中逐步完成提高,但我相信随模块组成。
着该系统在企业中的应用,所有的功能模块都会逐步完善起来。
在完成了前期的设计方案后,设计人员可以对系统实施具体的开发,参考文献:完成所谓的系统的物理结构。
主要包括系统开发、单元测试两个方面。
该[1]Bruce Eckel.Java 编程思想[M].北京:机械工业出版社,2002.阶段生成完整的物资管理信息系统。
最后的软件测试可以分为两个部分,[2]易金聪、张秀萍、宁正元,基于C/S 与B/S 模式的管理信息系统的设计第一部分为单元测试,是由软件设计人员对每个子模块的功能进行测试;与实现,微型电脑与应用,2003,19(4):23~25.第二部分是有最终用户在主框架上进行的产品最终测试,这一部分必须要[3]李会太,现代物流管理的八大核心思想[J].企业管理,2007,3.由用户参与进行,因为它不但要对产品的功能进行测试还要对产品的人性[4]黄梯云,管理信息系统导论[M].北京:机械工业出版社,2001.化,友好性进行测试。
[5]陈豫龙、何旭洪,数据库系统开发实例导航(第二版)[M].北京:人4 结束语民邮电出版社,2001.本系统的开发完善了企业的物资管理信息系统为,实现了企业物资管理从传统管理模式向现代信息化管理的转变,降低了企业的成本,提高了作者简介:企业的工作效率使企业的管理更加的规范化。
由于条件所限,该系统中少黄雅琼,女,助教,研究方向为高性能数据库,分布计算,数据类型理论。
(上接第175页)。