312种编码方案的遥控编码电路
遥控发射器及其编码

【遥控发射器及其编码】遥控发射器专用芯片很多,根据编码格式可以分成两大类,这里我们以运用比较广泛,解码比较容易的一类来加以说明,现以日本NEC的uPD6121G组成发射电路为例说明编码原理。
当发射器按键按下后,即有遥控码发出,所按的键不同遥控编码也不同。
这种遥控码具有以下特征:采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”,其波形如图2所示。
上述“0”和“1”组成的32位二进制码经38kHz的载频进行二次调制以提高发射效率,达到降低电源功耗的目的。
然后再通过红外发射二极管产生红外线向空间发射,如图3所示,连发波形如图4所示。
UPD6121G产生的遥控编码是连续的32位二进制码组,其中前16位为用户识别码,能区别不同的电器设备,防止不同机种遥控码互相干扰。
该芯片的用户识别码固定为十六进制01H;后16位为8位操作码(功能码)及其反码。
UPD6121G最多额128种不同组合的编码。
当遥控器在按键按下后,周期性地发出同一种32位二进制码,周期约为108ms。
一组码本身的持续时间随它包含的二进制“0”和“1”的个数不同而不同,大约在45~63ms之间,图4为发射波形图。
当一个键按下超过36ms,振荡器使芯片激活,将发射一组108ms的编码脉冲,这108ms发射代码由一个起始码(9ms),一个结果码(4.5ms),低8位地址码(9ms~18ms),高8位地址码(9ms~18ms),8位数据码(9ms~18ms)和这8位数据的反码(9ms~18ms)组成。
如果键按下超过108ms仍未松开,接下来发射的代码(连发代码)将仅由起始码(9ms)和结束码(2.5ms)组成。
代码格式(以接收代码为准,接收代码与发射代码反向)① 位定义③ 连发代码格式注:代码宽度算法:16位地址码的最短宽度:1.12×16=18ms 16位地址码的最长宽度:2.24ms×16=36ms已知8位数据代码及其8位反代码的宽度和不变:(1.12ms+2.24ms)×8=27ms∴ 32位代码的宽度为(18ms+27ms)~(36ms+27ms)1. 解码的关键是如何识别“0”和“1”,从位的定义我们可以发现“0”、“1”均以0.56ms 的低电平开始,不同的是高电平的宽度不同,“0”为0.56ms,“1”为1.68ms,所以必须根据高电平的宽度区别“0”和“1”。
无线编码遥控门铃电路原理与制作,22622272

无线编码遥控门铃电路原理与制作,22622272 无线编码遥控门铃电路原理与制作,2262/22722.遥控编码门铃接收电路上图为编码遥控门铃发射机电路原理图,它由发射电路和开关调制编码电路两部分组成。
发射电路由振荡回路L1、C1和振荡三极管VT1等组成。
振荡器采用电感三点式振荡电路,振荡线圈L1为印制电路板上的U型敷铜条,调谐电容器C1并联在U型敷铜条两端,L1抽头通过高频阻流圈L2和按钮开关S与电源GB正极相连,在高频振荡器等效电路中相当于接地;振荡线圈一端与VTI集电极相连,另一端通过电容器C2正反馈到VT1基极,组成电感三点式振荡电路。
振荡器反馈大小由C2、C3及振荡管VTI极间电容分压决定。
振荡频率主要由L1电感量、C2、C3电容量大小来决定,改变C1可以调整振荡频率。
L1采用敷铜条结构不会变形,增加振荡频率的稳定性,还兼有发射天线的作用。
R1为VT1上偏置电阻器,当编码集成电路IC1的编码输出端Dout为高电平时,超高频振荡器振荡,低电平时则停止振荡,进行开关调制。
调制编码电路由编码集成电路IC1等组成,通常产品出厂时,地址编码设定端、控制数据编码设定踹都处于悬空状态,成为12位地址0数据编码。
使用中要预置编码信号,在印制电路板上一般都预留地址编码区,由三排焊盘孔组成,采用焊锡搭焊的方式来选择悬空、接电源正极或接地三种状态。
同一套收、发系统地址码必须一致,不同的设备必须是设置不同的地址码,以防止系统相互之间干扰。
此外,编解码集成电路振荡电阻器必须配套,当编码PT2262振荡电阻器R2选用1.2MΩ时,解码PT2272振荡电阻器为220kΩ;如R2为4.7MΩ时,解码振荡电阻器对应为820kΩ。
如果编解码集成电路振荡电阻器不配套,将使遥控器灵敏度大大降低,甚至失去控制作用。
编码集成电路编码启动踹接地(处于低电平)时,编码器才输出编码信号,接下电源(发射)开关S,就会发射出遥控信号。
电阻器R3和发光二极管VD组成指示灯电路,指示遥控器工作状态。
遥控器编码解码
红外遥控器解码及硬件模拟电路自动化0805班郭虎u200813636 张杰u200813658遥控器解码题目设计:选择一个电视机遥控器,解出其编码方式;根据该编码,用硬件做出一个演示电路。
电路原理图:通过以上电路,遥控器发出红外信号,红外接收管接收到的信号,经过管脚1输入到示波器,得到了以下的波形。
1.整体波2.引导码 9.2ms低电平,4.5ms高电平3.用户码0100 0000,和用户反码1011 1111其中0为0.56ms低电平,0.60ms的高电平 1为0.56ms的低电平和1.70ms的高电平所有数字按键的用户码都一样4.用户码后面是最终的数字编码例如0110 0000表示按键61001 1111表示6的反码例如7的编码1110 0000和它的反码0001 1111其他数字的按键依次类推5.结束方式数子编码后40ms的高电平,然后结束6.所以编码方式为引导码+8位用户码+8位用户反码+8位数据吗+8位数据反码这是我们第一次借到的长虹彩电的遥控器的编码方式。
由于后来做硬件的时候,借不到原来的遥控器,只好换了一个,但是由于时间关系却没有拍下波形的图片;但是二者大体上一样,只是用户码和数据码的编码有所不同,0和1都是采用脉宽调制。
硬件的实现:使用单片机模拟遥控器的功能,当遥控器发射信号,红外接收头将信号输入到单片机,通过单片机上的数码管显示相应的数字。
以下是单片机实现此功能的c语言程序代码:#include<reg51.h>#include<intrins.h>#include <stdio.h>unsigned char code tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f} ;sbit p32=P3^2;sbit Ir=P3^3;sbit p01=P0^1;sbit led=P1^0;sbit led1=P1^1;unsigned int LowTime,HighTime;unsigned char flag=0;void delay(unsigned int a){unsigned int b;for(b=10;b>0;b--)for(;a>0;a--);}void WriteSegData(unsigned char b) {char seg;seg =tab[b];P0 = seg;delay(4);delay(4);P2 &= 0x1f;delay(4);delay(4);P2 |= 0xe0;}void WriteCsData(unsigned char cs) {cs &= 0x0f;P0 = ~cs;delay(4);delay(4);P2 &= 0x3f;delay(4);delay(4);P2 |= 0xe0;}void shownum(char c1){WriteSegData(c1);WriteCsData(1);}void dis(unsigned char num) {if(num==0x0c)shownum(0);else if(num==0x10) shownum(1);else if(num==0x11) shownum(2);else if(num==0x12) shownum(3);else if(num==0x14) shownum(4);else if(num==0x15) shownum(5);else if(num==0x16) shownum(6);else if(num==0x18) shownum(7);else if(num==0x19) shownum(8);else if(num==0x1a) shownum(9);elseshownum(11);}void main(){TMOD=0x01;ET0=1;IT0=0;EX0=1;EA=1;while(1) ;}void inter0() interrupt 0{ unsigned char i,j;unsigned char temp;unsigned char SaveCode[4];if(flag==0){led=0;flag++;}else{led=1;flag=0;}EX0=0; //关闭外部中断0,不再接受二次红外信号的中断,只解码当前的红外信号。
编码遥控电路全攻略之整套的遥控电路的SCH

再生的“祖宗”、改型超再生及简化超再生电路超再生接收电路的演变超再生自熄灭式接收电路按负载和电路形式的不同,可分四类。
图1是超再生的祖宗级电路,特点:灵敏度很高,相当于一台有独立本机振荡、一级混频、两级中放的标准超外差接收电路;对晶体管要求不严,允许很低的工作电压(譬如3V)环境仍保持差不多的参数。
60年代的民用收音机多用此电路,我想是那时的管子实在是太昂贵的原因。
缺点:带一铁芯变压器(取音频)图2是演变电路,省了变压器,参数有所降低。
图3是简化电路也是目前普遍使用的电路。
相对而言,所能提供的电性能指标也最差。
我还没完全搞清楚为什么厂家喜欢用它。
要不一是现在的管子好,二是又省了一个DZL---钱方面的原因.(图中R4R5D1构成简单的N工作点箝位电路,在批量生产时可以取得整体成品的相对统一性,有效减少后期工续的工作量)。
最后一类,是使用场效应管的电路。
成品有很高的性能,超再生所普遍存在的选择性和抗干扰指标差的缺陷,在这种电路里能得到一定的遏制。
这类电路目前很罕见,在此略。
超再生接收电路的基本架构以下谈我的看法:有一个很重要的概念:超再生接收电路全称“自息/他息灭式再生检波电路”,从这个定义上可以知道1:它归属检波电路的一类;2:它是一个工作在间歇状态的检波电路;3:这个检波电路利用了再生原理。
图A是再生检波的基本图其中C2起正反馈(再生)作用,R3R2R1共同决定N的工作点。
电路调好时,该检波电路有很高的灵敏度指标。
当这个检波电路再生分量很强时就会产生高频振荡。
在60、70年代该电路直接用于民用中波收音,该段加上音频放大复用成“再生来复式收音机”。
不敢用于短波,那时的管子fT太低--现在FT大于1G的管子一抓一大把,直接检波效果我看比那些粗制滥造的什么“十波段全球牌收音机”灵敏度指标差不到哪去?(增益值大家可以算出)那时候,用到短波,因是直接检波,故对几M--几十M的信号而言,性能大打折扣。
干脆把这个电路调到振荡去(增益很高),然后在A点加入个频率低得多的电压,让电路(N)的工作随该电压的变化简歇工作---这就是超再生电路。
无线编码电路详解

无线编码电路是一种用于处理和传输无线信号的电路,它通常由多个模块组成,包括信号调制、解调、编码、解码等模块。
这些模块协同工作,使得无线设备能够进行无线通信。
无线编码电路的主要功能是将原始信号(如语音、图像、数据等)转换成适合无线传输的信号形式。
在发送端,编码器将原始信号进行数字化处理,并将其转换成适合无线传输的信号格式,如调频(FM)、调相(PM)或调幅(AM)等。
然后,调制器将数字信号转换成适合在无线信道中传输的信号形式,并发送到信道中。
在接收端,解调器将接收到的信号转换成数字信号,并将其传递给解码器进行解码。
解码器将数字信号转换成原始信号的形式,供用户使用。
无线编码电路的设计需要考虑许多因素,如信道特性、信号质量、传输速率、功耗等。
为了提高信号质量和传输速率,通常采用多种技术手段,如差分相移键控(DPSK)、相干检测、均衡技术等。
同时,为了降低功耗,通常采用低功耗设计技术,如CMOS工艺、低电压供电等。
总之,无线编码电路是实现无线通信的关键部分之一,它涉及到的技术领域非常广泛,需要综合考虑各种因素来进行设计和优化。
华宝空调红外遥控编码资料
华宝空调红外遥控编码资料简介华宝空调是一款广泛使用的家用空调品牌,它提供了方便的红外遥控功能,使得用户可以轻松控制空调的各种设置。
本文将介绍华宝空调红外遥控编码资料,包括红外遥控编码的原理、常用编码格式、编码数据的解析和使用方法等。
红外遥控编码原理红外遥控编码是通过发送特定的红外脉冲信号来实现对设备的控制。
华宝空调红外遥控编码原理基于脉冲宽度调制(PWM)技术,即通过调整脉冲信号的宽度来表示不同的控制指令。
常用编码格式华宝空调红外遥控编码使用了一种常见的编码格式,即NEC编码格式。
NEC编码格式是一种广泛应用于红外遥控领域的标准编码格式,它使用了32位二进制数据表示一个完整的红外遥控指令。
NEC编码格式的具体结构如下: - Header:8位数据,用于表示一个遥控指令的开始。
- Address:8位数据,用于表示遥控器的地址。
- Command:8位数据,用于表示具体的遥控指令。
- Inverted Command:8位数据,用于表示Command的反码。
编码数据的解析要解析华宝空调红外遥控编码数据,可以按照以下步骤进行: 1. 接收红外遥控编码数据。
2. 解析Header,判断是否为一个完整的红外遥控指令。
3. 解析Address,获取遥控器的地址。
4. 解析Command,获取具体的遥控指令。
5. 对Command进行处理,执行相应的操作。
使用方法要使用华宝空调红外遥控编码,可以按照以下步骤进行: 1. 获取红外遥控编码数据。
2. 解析编码数据,获取遥控指令。
3. 根据遥控指令,执行相应的操作,如调整温度、风速、模式等。
下面是一个示例代码,演示如何使用华宝空调红外遥控编码进行温度调节:# 导入红外遥控库import infrared_remote_control as irc# 获取红外遥控编码数据data = irc.get_infrared_data()# 解析编码数据header = irc.parse_header(data)address = irc.parse_address(data)command = irc.parse_command(data)# 判断遥控指令类型if command == "temperature_up":# 温度增加temperature = irc.get_current_temperature()irc.set_temperature(temperature + 1)elif command == "temperature_down":# 温度减少temperature = irc.get_current_temperature()irc.set_temperature(temperature - 1)else:# 其他指令pass总结华宝空调红外遥控编码资料介绍了红外遥控编码的原理、常用编码格式、编码数据的解析和使用方法。
遥控编码原理

遥控编码原理遥控编码原理是指利用编码技术将信号转换成特定的代码,以便于远程控制设备的工作原理。
遥控编码原理在现代生活中得到了广泛的应用,例如遥控电视、空调、车库门等家用电器,以及遥控玩具、遥控车辆等玩具产品。
下面将从遥控编码的基本原理、常见的遥控编码方式以及遥控编码的应用进行详细介绍。
首先,遥控编码的基本原理是利用数字信号对控制设备进行编码。
当用户按下遥控器上的按钮时,遥控器会发送特定的数字信号,这些信号经过编码后被传输到被控制的设备上,设备接收到信号后解码并执行相应的操作。
这种编码原理可以确保每个按钮对应的操作都能被准确地传达给被控制的设备,从而实现远程控制的功能。
其次,常见的遥控编码方式有固定编码、学习编码和滚动编码。
固定编码是指遥控器和设备预先设置好相同的编码,当用户按下按钮时,遥控器发送固定的编码信号给设备。
学习编码是指遥控器可以学习设备的编码,用户按下按钮时,遥控器会学习设备的编码并保存下来,以后再按下相同按钮时,遥控器会发送学习到的编码信号给设备。
滚动编码是指遥控器和设备之间的编码是动态变化的,每次按下按钮时,遥控器都会发送不同的编码信号给设备,以确保安全性和防止被复制。
最后,遥控编码在现代生活中有着广泛的应用。
除了家用电器和玩具产品外,遥控编码还被应用在汽车钥匙、门禁系统、无线门铃等领域。
通过遥控编码技术,用户可以方便地远程控制各种设备,提高了生活的便利性和舒适度。
总的来说,遥控编码原理是利用编码技术实现远程控制的基本原理。
通过对遥控编码的基本原理、常见的遥控编码方式以及遥控编码的应用进行了介绍,相信大家对遥控编码原理有了更深入的了解。
遥控编码技术的不断发展和应用将会为人们的生活带来更多的便利和乐趣。
遥控编码电路
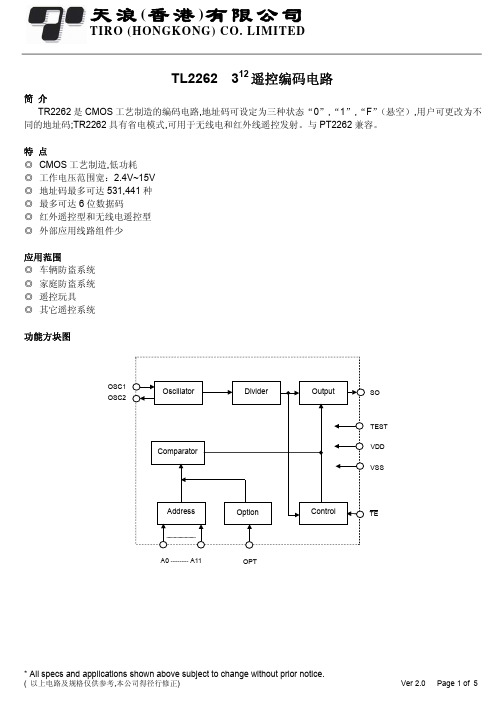
TL2262 312遥控编码电路简介T R2262是CMOS工艺制造的编码电路,地址码可设定为三种状态“0”,“1”,“F”(悬空),用户可更改为不同的地址码;T R2262具有省电模式,可用于无线电和红外线遥控发射。
与PT2262兼容。
特点◎ CMOS工艺制造,低功耗◎ 工作电压范围宽:2.4V~15V◎ 地址码最多可达531,441种◎ 最多可达6位数据码◎ 红外遥控型和无线电遥控型◎ 外部应用线路组件少应用范围◎ 车辆防盗系统◎ 家庭防盗系统◎ 遥控玩具◎ 其它遥控系统功能方块图OSC1 OSC2A0 -------- A11OPT引脚图产品规格分类 T RIR : 为红外遥控应用,SO 脚输出数据中有载波频率,接收端应将信号反向H : 对VDD 触发, L : 对VSS 触发S : 18 PIN SOP 封装, 未标为18PIN DIP 封装管脚说明管脚名称 输入/输出 说 明A0~A11 输入 地址设定管脚,用于地址编码,可设定为”0”﹑”1”﹑”F”(悬空),三种状态。
D0~D3 输入 数据输入端,可由OPT1及OPT2设定为内置上拉电阻或下拉电阻。
VDD 输入 电源正级输入端。
VSS 输入 电源负级输入端。
TEB 输入 编码启动端,低电平有效,内置上拉电阻。
OSC1 输入 振荡器输入端。
OSC2 输出 振荡器输出端。
SO 输出 串行编码输出端。
OPT 输入 输出载频设定端,当设定为”1”时,SO 脚有载频输出,内置下拉电阻。
OPT1 输入 D0~D3内部电阻设定端,内置上拉电阻,当设定为”0”时, D0~D3内置下拉电阻,有一个为 ”1”,即有编码发出。
OPT2 输入D0~D3内部电阻设定端,内置上拉电阻,当设定为”0”时, D0~D3内置上拉电阻,有一个为 ”0”,即有编码发出。
A6/D5A2A1T R 2262A5A4A3A0VDD A10/D1 181******** 6 5 4 3 2 1 11 8 A7/D413 12 A11/D0 TE OSC2 OSC1 SO A9/D2 109A8/D3VSSA6A2A1T R 2262-L/T R 2262-HA5A4A3A0VDD D1 181******** 6 5 4 3 2 1 11 8 A713 12D0 NC OSC2 OSC1 SO D2 109D3VSS极限参数(Ta=25℃)参数符号参数范围单位电源电压V DD -0.3~15.0 V 输入电压V I V SS-0.2 to V DD+0.2 V 工作温度T OPR -20~+70 ℃储存温度T STG -50~+125 ℃电气参数(除非特殊说明,T EMP=25℃, V DD=12.0V)参数符号测试条件最小值典型值最大值单位电源电压V DD 2.4 - 15 V静态电流I SB V DD=12V振荡器停振A0~A11开路- 3-uAmA 工作电流I OP V DD=12V无负载- 1 1.5输出驱动电流I O @V DS=1.2 - 2 - mAV IH V DD-0.2 V DD V DDV 输入电压V IL V SS V SS V SS+0.2外接电阻—振荡频率对应表(Extemal+-30%)T R2262与PT2262, T R2272与PT2272振荡电阻对照表发射IC 接收IC型号PT2262 T R2262 PT2272 T R22724.7MΩ 4.7MΩ 820KΩ680KΩ3.3MΩ 2.7MΩ 680KΩ470KΩ振荡电阻2.7MΩ 2.2MΩ 390KΩ390KΩ1.5MΩ 1.0MΩ 220KΩ 220KΩ注:表内数据为参考数值,用户请视具体应用情况做相应调整应用原理图1) UHF频段四数据发射电路2) UHF频段12位地址码发射电路3) UHF频段12位地址码(零静态电流)发射电路4) 红外线六数据发射电路,调整Rosc振荡阻值,使SO管脚载频为38KHz。
遥控发射器电路原理及遥控编码格式简介 2009-12-23
4. 遥控器的基本电路
5. 遥控器信号的发射方式(1) 遥控器信号的发射方式(1)
遥控器所发送的信号是通过载波输出的,即所有的脉冲信号均调制在 载波上,载波频率通常为38K。载波是电信号去驱动红外发光二极管 ,将电信号变成红外线(940nm)信号发射出去。在接收端,需要反过 来通过光电二极管将红外线光信号转成电信号,经放大、整形、解调 等步骤,最后还原成原来的脉冲编码信号,完成遥控指令的传递。
2. 遥控器基本控制功能(2) 遥控器基本控制功能(2) 15) CH-/+ 方向上下及频道加减 16) Menu 主菜单键 17) Source 切换输入信源 18) Record 回前一次观看的节目 19) Exit 退出(exit) 20) Enter 进入(确定) 21) EPG 数字电视电子节目指南 22) FAV 喜爱节目编辑 23) TV/Radio TV 和Radio 切换 24) CC (Close Captioning) 字幕顯示----美規 25)TT(Tele Text)图文页面功能---毆規 26) Subtitle 字幕---日規,美規,毆規 27) 其他扩展功能
Monitor BU TV R&D 2009/12/23
遙控發射器電路原理 及遙控編碼格式簡介
Yuri Suຫໍສະໝຸດ Summary 1. 遥控器简介 2. 遥控器基本控制功能 3. 遥控器的工作原理 4.遥控器的基本电路 遥控器的基本电路 5. 遥控器信号的发射方式 6. 遥控器编码格式简介
1. 遥控器简介
信号调制是用二进制信号的编码乘以频率为38kHz 的脉冲信号得到的 间断脉冲串,即是调制后用于红外发射二极管发送的信号,如图所示
6. 遥控器的编码方式
目前应用于家电等领域的红外遥控装置,并没有统 一的国际标准,目前市场上多见的红外线遥控编码 芯片,超过10多种,分别由飞利浦公司、NEC公司 、SONY公司、东芝公司、JVC公司等生产,使 用的编码方式各不相同。目前使用最广泛、兼容 产品最多的,是利浦公司和NEC公司的编码芯片 。
电子线路课设报告病人呼叫大夫的电路设计、加法电路的设计、用74ls90实现十进制计数器的设计与制作

目录1 引言 (3)2 Multisim9简介 (4)2.1 Multisim特点 (4)2.2 Multisim9简介 (4)3 电路设计 (5)3.1病人呼叫大夫的电路设计 (5)3.1.1设计任务 (5)3.1.2实验原理及思路分路 (5)3.1.374ls148编码器 (5)3.1.4电路图及仿真结果 (6)3.2加法电路的设计 (6)3.2.1设计任务 (7)3.2.2实验原理及框图 (7)3.2.3电路图及仿真结果 (7)3.3用74ls90实现十进制计数器的设计与制作 (8)3.3.1设计任务 (8)3.3.2 74ls逻辑功能 (9)3.3.3电路仿真 (9)3.4数码管显示控制电路的设计 (11)3.4.1设计任务 (11)3.4.2实验原理及设计分析 (11)3.4.3电路图及仿真结果 (13)3.5灯控电路的设计 (14)3.5.1设计任务 (14)3.5.2电路分析及原理框图 (15)3.5.3电路仿真 (15)3.6 直流稳压源的电路设计 (17)3.6.1设计任务 (17)3.6.2实验原理及思路分析 (18)3.6.3电路仿真 (18)4 总结和体会 (20)致谢 (21)参考文献 (22)1 引言1.1引言随着时代的发展,计算机技术在电子电路设计中发挥着越来越大的作用。
传统的电子线路设计开发,通常需要制作一块试验板或在面包板上来进行模拟实验,以测试是否达到设计指标要求;并且需要反复试验、调试,才能设计出符合要求的电路。
这样做,既费时又费力,同时也提高了设计成本;另外,因受工作场所、仪器设备等因素的限制,许多试验(例如理想化、破坏性的实验)不能进行。
随着计算机硬件与软件的发展,解决以上问题的计算机仿真技术应运而生。
利用计算机仿真软件,电子设计师可以从概念、算法、协议等开始设计电子系统,大量工作可以通过计算机完成,并可以将电子产品从电路设计、性能分析到设计出版印刷板的整个过程在计算机软件上自动处理完成。
遥控电路原理范文
遥控电路原理范文遥控电路是一种将无线电波作为传输介质进行信息传输和控制的技术。
它广泛应用于电视机、空调、音响等家电设备,以及无人机、车辆和机器人等自动控制设备中。
遥控电路的原理主要包括编码、发射、接收和解码四个方面。
编码:遥控电路的编码主要是将控制信号转换成特定的脉冲码序列。
常见的编码方式有脉冲编码调制(PCM)、脉冲位置调制(PPM)和频率调制(FM)等。
其中,PCM方式将控制信号转换成脉冲宽度的形式,PPM方式将信号转换成脉冲位置的形式,FM方式则是根据信号的频率变化来进行编码。
发射:遥控电路的发射部分主要将编码后的信号通过发射器发射出去。
发射器通常由一个振荡器和一个功率放大器组成。
振荡器产生高频信号,功率放大器将信号放大到足够的功率以便传输。
发射部分还需要一个天线将信号辐射出去。
接收:遥控电路的接收部分主要通过天线接收经过编码和调制的信号。
接收到的信号经过放大后,进入解调器。
解调器将信号解调成原始的控制信号,即编码前的信号。
解调的方式与编码方式相对应,一般采用相同的解调方式。
解码:遥控电路的解码部分主要将解调后的信号解码成对应的控制信号。
解码器根据接收到的信号来判断是哪个按键被按下,然后将对应的控制信号输出到被控制的设备。
解码器一般采用数字逻辑电路来实现,常见的解码方式有二进制解码器、译码器和专用芯片等。
总结起来,遥控电路的原理是通过编码将控制信号转换成特定的脉冲码序列,然后通过发射器将信号传输出去。
接收器通过天线接收信号,并将其解调成原始信号。
最后,解码器将解调后的信号解码成对应的控制信号,用于控制被控制的设备。
随着无线通信技术的不断进步,遥控电路已经得到了广泛的应用。
它不仅可以方便地实现远程控制,还可以实现无线数据传输和远程监控等功能。
因此,了解遥控电路的原理对于我们理解无线通信技术的发展和应用具有重要的意义。
数字编译码多通道无线遥控电路

XT28.6MHzVT19013R120KR24.7K R3100R4200C220PC310n C4200pC620pVT29013T1C24.5/20P T2C 5405/20PANT1L1VT39012C710nVD1S1S6R56.8KC81nR63.3MS7S129VA7/D1A12/D6D0VssTECSS00SC1A6A1Vd d167913141517Y N 5103图1编码,晶振选用26.0~29.8MHz石英晶体均可。
其它元件无特殊要求。
T1、T2、L1、L2均用φ0.51mm漆包线在φ8mm线圈骨架上绕制,中间放入NXD-20磁芯。
T1初级10匝,次级3匝;T2初级8匝,次级3匝;L1绕12匝;L2绕8~10匝。
高频阻流圈可用2.2~5uH 成器电感,或在100K、1/8W金属模电阻上乱绕30~50匝代用,线径为φ0.1~φ0.2mm。
4.调试方法(1)先断开接收机C16与YN5203-L6 14脚的连线,在C16与地之间跨接一只高阻耳机。
接通接收机电源,微调R8、R9、C10、C12、C13、R7等,使耳机中的“沙沙……”超再生噪声最强,但不应有爆、叫等声音。
(2)打开发射机电源(将9V电压直接加至载波电路),微调C1、C5、T1、T2、龙磁芯及接收机C11、L2磁芯,使耳机中变得无任何声响,说明发射频率与接收频率已基本一致。
然后逐渐拉开两机距离,重复上述调整,至接收距离最远。
(3)取下耳机。
将发射机和接收机电路恢复原样。
打开两机电源,按S1~S6遥控键,接收机对应发光管应点亮,否则庆检查数字编码器是否良好,引脚有无脱焊开路等。
直到故障排除后,遥控电路使可投入使用。
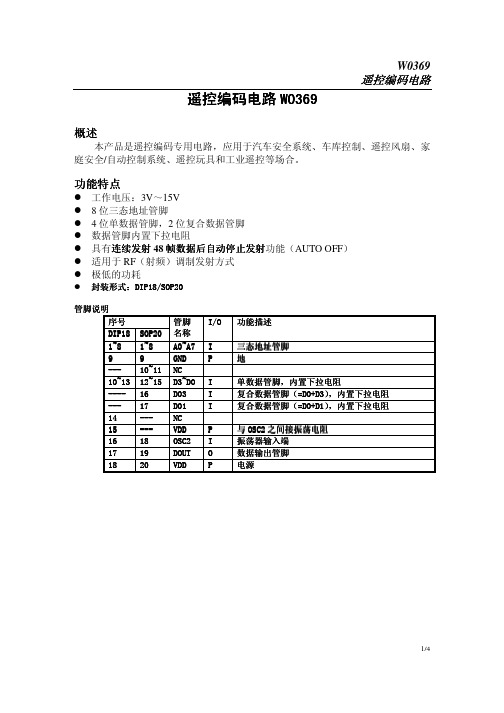
遥控编码电路W0369
≥2T 数据 脚
DOUT
1帧
1帧 1帧
64T 2048T
64T
48帧
典型应用线路图
1 A0
VDD 18
2 A1
DOUT 17
3 A2
OSC2 16
4 A3
3
7 A6
D1 12
8 A7
D2 11
9 GND
D3 10
W0369AGP W0369BGP
RF
2.4M
12V BATTERY
1 A0
VDD 18
2 A1
DOUT 17
3 A2
OSC2 16
4 A3
D01 15
5 A4
D03 14
6 A5
D0 13
7 A6
D1 12
8 A7
D2 11
9 GND
D3 10
W0369CGP-0103 W0369DGP-0103
RF
2.4M
注:振荡电阻 2.4MΩ为推荐值,用户须根据实际使用情况进行调整。
T
OSC
位“0” 4T 位“1” 位“ f” 4T
12T 12T
12T
4T
4T
12T
12T
12T 4T 4T
同步位 4T
128T
字码
一组位码构成了字码。字码由 8 位地址位码、4 位数据位码、1 位同步位码构成。8
位地址位码和 4 位数据位码由相应的地址脚 A0~A7 和数据脚 D3~D0、D03、D01 在发射时
―
数据端下拉电阻 RPD
Vin=12V
30
DOUT 输出拉电流 IOH
VDD=12 V,VOH=6V
-17
遥控编码器原理

遥控编码器原理
遥控编码器原理是指通过遥控信号将特定的数据传输给遥控接收器的一种技术。
它采用特定的编码方式将数据转换成脉冲信号,并通过无线电波或红外线等方式传输。
遥控编码器通常由编码按键、微控制器和无线模块组成。
在遥控编码器中,编码按键可以通过按下不同的按键,产生不同的编码信号。
例如,按下数字"1"键可能会产生一个特定的
脉冲编码,而按下数字"2"键可能会产生另一个编码信号。
这样,通过按下不同的按键,可以产生不同的编码数据。
微控制器是遥控编码器的核心部件,它负责解析编码按键产生的信号,并将其转换成特定的二进制编码。
微控制器还可以对编码信号进行加密和校验,以提高信号的安全性和可靠性。
无线模块是用来将编码信号转换成无线电波或红外线信号,并进行传输。
无线模块能够将编码数据转换成特定的调制信号,并通过天线或发射器发送出去。
接收器收到信号后,可以通过解调和解码过程还原出原始的编码数据。
总体来说,遥控编码器通过特定的编码方式将按键产生的信号转换成编码数据,并通过无线传输的方式将数据发送给接收器。
接收器通过解码和解调过程,还原出原始的编码数据,并根据数据执行相应的操作。
遥控编码器在电视遥控器、汽车遥控器等各种遥控设备中都得到了广泛应用。
信号机控制电路和编码电路解析1

1GJ、2GJ、3GJ逻辑关系表格
dbdwd-zjk-wxc
8
一般信号点编码电路1GJ、2GJ、3GJ联锁逻辑关系图解
x x A5G A4G A3G A2G A1G D1G D2G D3G D4G D5G
B5G
B4G
B3G
B2G
B1G x s
C1G
C2G
C3G
C4G
C5G
• •
假设列车运行到D5G,逻辑联锁关系如下:
26.8HZ
16.9HZ
13.6HZ
三接近区段占用,三接近区段GJF↓ →二接近1GJ↓ →一接近 2GJ↓ →一接近GJF ↑ →一接近区段1GJ ↑的情况下,一接近区 段点绿黄灯。
dbdwd-zjk-wxc 28
一接近区段L点—三接近区段占用编码图
dbdwd-zjk-wxc
29
一接近区段L点—三接近区段占用LU灯点灯电路
进站信号机黄灯,ZXJ2F↑.LXJ3F↑→三接近区段3GJ ↑→二接近区段1GJ ↑→一接近 区段2GJ ↑ ;一接近区段GJF ↑ →一接近区段1GJ ↑,一接近区段点绿灯。
dbdwd-zjk-wxc 32
一接近区段L点—进站信号机显示关联编码逻辑图
一离去区段 SN S 18HZ 三接近区段 二接近区段 16.9HZ 一接近区段 13.6HZ 11.4HZ 二离去区段 三离去区段
2
目录
1 2 3 • 编码基本原理及GJ联锁逻辑关系 • 一般信号点(LL)编码电路和点灯电路 • 一接近信号点(L)编码电路和点灯电路 • 二接近信号点(LU)编码电路和点灯电路 • 三接近信号点(U)编码电路和点灯电路 • 反方向行车的发送编码电路
4
5 6 7
遥控编码原理
遥控编码原理遥控编码原理是指利用数字信号对遥控器进行编码,以实现对目标设备的遥控操作。
在遥控技术中,编码原理是至关重要的,它直接影响着遥控器的稳定性、灵敏度和安全性。
下面将从遥控编码原理的基本概念、工作原理和应用范围等方面进行详细介绍。
遥控编码原理的基本概念。
遥控编码原理是通过对按键操作进行编码,将按键信息转换成数字信号,再通过无线传输的方式发送到接收器,最终实现对目标设备的遥控操作。
在遥控编码原理中,编码器起着至关重要的作用,它能够将按键信息转换成数字信号,并通过一定的编码算法进行处理,以确保信号的稳定性和可靠性。
遥控编码原理的工作原理。
遥控编码原理的工作原理主要包括按键编码、数字信号传输和解码三个基本过程。
首先,当用户按下遥控器上的按键时,编码器会将按键信息转换成数字信号,并进行一定的编码处理;然后,经过无线传输,数字信号会被发送到接收器;最后,接收器会对接收到的数字信号进行解码,将其转换成控制信号,从而实现对目标设备的遥控操作。
遥控编码原理的应用范围。
遥控编码原理广泛应用于各种遥控设备中,如遥控车、遥控飞机、遥控船、智能家居等。
在这些设备中,遥控编码原理能够实现对设备的精确控制,提高了用户的操作体验和设备的稳定性。
同时,遥控编码原理也在工业自动化、无人机、智能交通等领域有着重要的应用,为现代科技的发展做出了重要贡献。
总结。
遥控编码原理作为遥控技术的核心之一,对于提高遥控设备的稳定性和可靠性起着至关重要的作用。
通过对遥控编码原理的深入了解,我们可以更好地理解遥控技术的工作原理,为遥控设备的研发和应用提供技术支持。
希望本文对遥控编码原理有所帮助,谢谢阅读!。
史上最全的红外遥控器编码协议(可编辑)
史上最全的红外遥控器编码协议目录1MIT-C8D8 40k2 MIT-C8D8 33K3SC50560-001003P4M504625M50119P-016M50119L7RECS808M30049LC7464M10LC7461-C1311IRT1250C5D6-0112Gemini-C6-A13Gemini-C614 Gemini-C17 3136K -115KONKA KK-Y26116PD6121G-F17DATA-6BIT18Custum-6BIT19M9148-120SC3010 RC-521 M50560-1 40K22 SC50560-B123C50560-002P24M50119P-0125M50119P-126M50119P27IRT1250C5D6-02 28HTS-C5D6P29Gemini-C1730Gemini-C17 -231data6bit-a32data6bit-c33X-Sat34Philips RECS-80 35Philips RC-MM36Philips RC-637Philips RC-538Sony SIRC39Sharp40Nokia NRC1741NEC42JVC43ITT44SAA3010 RC-536K45SAA3010 RC-538K46NEC2-E247 NEC-E348 RC-5x49 NEC1-X250 _pid006051 UPD1986C52 UPD1986C-A53 UPD1986C-C54 MV500-0155 MV500-0256 Zenith S101 MIT-C8D840KMIT-C8D840K是一种常见的红外遥控编码格式该格式出现在万能遥控器ZC-18A 600-917 中Features 基本特点18位地址码8位数据码结束码2脉宽调制方式PWM3载波400 KHZ4逻辑位时间com msModulation 调制逻辑0Logical0是由935us的无载波间隔和280us的40KHZ载波组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由280us的40KHZ载波和2156us的无载波间隔组成Protocol 协议从上图中可看到 MIT-C8D840K一帧码序列是由8位地址码8位数据码和结束码组成长按键不放发出的码波形序列如下图即将整个波形以周期4478ms进行重复2 MIT-C8D8 33KMIT-C8D8 33K 是一种常见的编码格式该格式来源于OMEGA万能遥控器码组号为0138及祝成万能遥控器ZC-18A码组号为644735736Features 基本特点18位地址码8位数据码2脉宽调制方式PWM3载波33KHZ4逻辑位的时间comsModulation 调制隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由280us的33KHZ载波和2156us的无载波间隔组成Protocol 协议从上图可以看到MIT-C8D8 33K 一帧码序列是由8位地址码8位数据码长按键不放发出的码波形序列如下图就是将第一帧波形以周期501ms进行重复3 SC50560-001003P 分割码未有数据标注SC50560-001003P是一种常见的红外遥控编码格式该格式出现在CL311URC-8910RM-123CRM-139S的062码组ZC-18A600-917ZC-18A400-481RM-301C VT3620AVT3630RM-402C的TV-012码组Features 基本特点1引导码8位地址码分割码未有数据标注 8位数据码结束码2脉宽调制方式PWM3载波38KHZ4逻辑位时间comModulation 调制逻辑0Logical0是由520us的38KHZ载波和520us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度隔组成Protocol 协议从上图中可看到 SC50560-001003P一帧码序列是由引导码 8ms 的载波和4ms的间隔 8位地址码分割码8位数据码和结束码组成长按键不放发出的码波形序列如下图即将整个波形以周期12002ms进行重复4 M50462M50462是一种常见的红外遥控编码格式该格式出现在RM-123CRM-139SZC-18A600-917RM-301C VT3620AVT3630RM-402C Features 基本特点18位地址码8位数据码结束码2脉宽调制方式PWM3载波38 KHZ4逻辑位时间comModulation 调制逻辑0Logical0是由260us的38KHZ载波和780us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由260us的38KHZ载波和1799us的无载波间隔组成Protocol 协议从上图中可看到 M50462一帧码序列是由8位地址码8位数据码和结束码组成长按键不放发出的码波形序列如下图即将整个波形以周期45ms 进行重复5 M50119P-0142K 分割码未有数据标注M50119P-0142K是一种常见的红外遥控编码格式该格式出现在URC-8910CBL-0009 ZC-18A 600-917 的736码组ZC-18A 400-481 VT3630的SAT-001码组Features 基本特点1数据帧4位地址码6位数据码分割码4位地址码相同码6位数据码相同码结束码重复帧用户码相同码结束码2脉宽调制方式PWM3载波418 KHZ4逻辑位时间comsModulation 调制逻辑0Logical0是由967us的418KHZ载波和967us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由967us的418KHZ载波和2901us的无载波间隔组成Protocol 协议从上图中可看到 M50119P-0142K两帧码序列是由数据帧4位地址码6位数据码分割码4位地址码相同码6位数据码相同码结束码重复帧地址码相同码结束码长按键不放后续发出的波形如下长按键不放发出的码波形序列如下图就是将重复帧波形以周期62855ms进行重复M50119LM50119L是一种常见的红外遥控编码格式该格式出现在万能遥控器CL311URC-8910VCR-0041INTER DIGI-SATVT3630中Features 基本特点13位地址码7位数据码结束码2脉宽调制方式PWM3载波379 KHZ4逻辑位时间comModulation 调制逻辑0Logical0是由260us的379KHZ载波和780us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由260us的379KHZ载波和1820us的无载波间隔组成Protocol 协议从上图中可看到 M50119L一帧码序列是由3位地址码7位数据码和结束码组成长按键不放发出的码波形序列如下图即将整个波形以周期255ms 进行重复7 RECS8068RECS8068是一种常见的红外遥控编码格式该格式来源于URC8910的CD-0764码组Features 基本特点12位控制码 3位地址码6位数据码结束码2脉宽调制方式PWM3载波33KHZ4逻辑位时间comModulation 调制逻辑0Logical0是由160us的33KHZ载波和5600us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由160us的33KHZ载波和8480us的无载波间隔组成Protocol 协议从上图中可看到RECS8068一帧码序列是由2位控制码 3位地址码6位数据码结束码组成的长按键不放发出的码波形序列如下图整个波形以周期1383ms进行重复8 M3004 CarrierM3004 Carrier是一种常见的红外遥控编码格式该格式出现在遥控器CL311 RM-123CRM-139S148ZC-18A600-917ZC-18A400-481RM-301CINTER-DIG I-SAT VT3620AVT3630RM-402CTV-060中Features 基本特点1引导码1位翻转码 3位地址码6位数据码结束码2脉宽调制方式PWM3载波38KHZ4逻辑位时间comModulation 调制逻辑0Logical0是由141us的38KHZ载波和4919us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由141us的38KHZ载波和7449us的无载波间隔组成Protocol 协议从上图中可看到 M3004 Carrier一帧码序列是由1位引导码 1位翻转码 3位地址码6位数据码结束码组成的长按键不放发出的码波形序列如下图整个波形以周期121651ms 进行重复9 LC7464M 校验码怎么算的LC7464M是一种常见的红外遥控编码格式该格式出现在万能遥控器CL311URC-8910 RM-139SZC-18A600-917ZC-18A400-481VT3620AVT3630Features 基本特点1引导码15位地址码4位校验码4位地址码28位数据码8位校验码结束码3载波38KHZ4逻辑位时间comModulation 调制逻辑0Logical0是由420us的38KHZ载波和420us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由420us的38KHZ载波和1260us的无载波间隔组成Protocol 协议从上图中可看到 LC7464M一帧码序列是由引导码 com的间隔15位地址码4位校验码4位地址码28位数据码8位校验码结束码组成长按键不放发出的码波形序列如下图整个波形以8297ms的周期进行重复10 LC7461-C13LC7461-C13是一种常见的红外遥控编码格式该格式出现在万能遥控器CL311URC-8910RM-123CRM-139S101ZC-18A600-917RM-301CVT3630RM-402C的TV-131码组Features 基本特点1数据帧引导码13位地址码13位地址码-反码8位数据码8位数据码反码结束码重复帧3载波38KHZ4逻辑位时间comModulation 调制逻辑0Logical0是由560us的38KHZ载波和560us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由560us的38KHZ载波和1680us的无载波间隔组成Protocol 协议数据帧从上图中可看到 LC7461-C13一帧码序列是由引导码 9-ms的载波和45ms的间隔 13位地址码13位地址码-反码 8位数据码8位数据码反码结束码组成重复帧由结束码组成长按键不放发出的后续波形如下图其发出的整个码波形序列如下图由重复帧开始以周期10811ms 进行重复11 IRT1250C5D6-010HzIRT1250C5D6-010Hz是一种常见的红外遥控编码格式该格式出现在万能遥控器VT3620A中Features 基本特点1引导码5位地址码6位数据码结束码3载波00 KHZ4逻辑位时间comsModulation 调制逻辑0Logical0是由16us的00KHZ载波和160us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由16us的00KHZ载波和368us的无载波间隔组成Protocol 协议从上图中可看到IRT1250C5D6-010Hz一帧码序列是由引导码0016 ms的载波和0545ms的间隔 5位地址码6位数据码结束码16-54316-593136us组成长按键不放发出的码波形序列如下图即将整个波形以周期596208ms进行重复12 Gemini-C6-A40KGemini-C6-A40K是一种常见的红外遥控编码格式该格式出现在万能遥控器VT3630的SAT-034码组Features 基本特点1地址帧引导码7位地址码2结束码数据帧引导码相同码7位数据码结束码地址帧相同帧数据帧相同帧2脉宽调制方式PWM3载波400 KHZ4逻辑位时间长度是105msModulation 调制逻辑0Logical0是由525us的无载波间隔和525us的40KHZ载波组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由525us的40KHZ载波和525us的无载波间隔组成Protocol 协议从上图中可看到 Gemini-C6-A40K由四帧码组成地址帧码序列由引导码 coms的间隔 7位地址码和结束码组成数据帧码序列由引导码相同码 coms的间隔 7位数据码和结束码组成地址帧相同帧同地址帧数据帧相同帧同数据帧长按键不放发出的码波形序列如下其整个码波形序列如下图就是将第三第四帧波形以周期693ms 进行重复13 Gemini-C63136Gemini-C63136是一种常见的红外遥控编码格式该格式出现在万能遥控器CL311与VT3620A中Features 基本特点1引导码7位数据码结束码2脉宽调制方式PWM3载波310 KHZ4逻辑位时间comsModulation 调制逻辑0Logical0是由496us的无载波间隔和496us的31KHZ载波组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由496us的31KHZ载波和496us的无载波间隔组成Protocol 协议从上图中可看到 Gemini-C63136一帧码序列是由引导码 053ms 的载波和265ms的间隔 7位和结束码组成长按键不放发出的码波形序列如下图即将整个波形以周期90724ms进行重复14 Gemini-C17 3136K -1Gemini-C17 3136K -1是一种常见的红外遥控编码格式该格式来源于CL311Features 基本特点1引导帧引导码10位地址码结束码地址帧引导码相同码10位地址码2结束码引导帧相同帧数据帧引导码相同码10位数据码结束码引导帧相同帧2脉宽调制方式PWM3载波304KHZ4逻辑位时间长度是106msModulation 调制逻辑0Logical0是由530us的304KHZ载波和530us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由530us的无载波间隔和530us的304KHZ载波组成Protocol 协议从上图中可看到 Gemini-C17 3136K -1帧码其依次为引导帧码序列是由引导码 com的间隔 10位地址码与结束码206ms组成用户帧码序列是由引导码-相同码 com的间隔 10位地址码2与结束码 1025ms 组成引导帧-相同帧码与引导帧码相同数据帧码序列是由引导码-相同码 com的间隔 10位数据码与结束码 11714ms 组成引导帧-相同帧码与引导帧码相同长按键不放后续发出的波形如下其整个码波形序列如下图就是将第四第五帧波形以周期1653ms 进行重复15 KONKA KK-Y261KONKA KK-Y261是一种常见的红外遥控编码格式该格式来源于RM-123CRM-139S的113码组RM-301C RM-402C的204码组Features 基本特点1引导码8位地址码 8位数据码结束码2脉宽调制方式PWM3载波38KHZ4逻辑位时间长度是3ms或2msModulation 调制逻辑0Logical0是由500us的38KHZ载波和1500us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由500us的38KHZ载波和2500us的无载波间隔组成Protocol 协议从上图中可看到 KONKA KK-Y261一帧码序列是由引导码 3ms的载波和3ms的间隔 8位地址码 8位数据码结束码组成长按键不放发出的码波形序列如下图即将整个波形以周期66ms 进行重复16 PD6121G-FPD6121G-F是一种常见的红外遥控编码格式Features 基本特点1引导码8位地址码8位地址码28位数据码8位数据码反码2脉宽调制方式PWM3载波38KHZ4逻辑位时间comsModulation 调制逻辑0Logical0是由564us的38KHZ载波和564us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由564us的38KHZ载波和1692us的无载波间隔组成Protocol 协议从上图中可看到 PD6121G-F一帧码序列是由引导码 coms的间隔 8位地址码8位地址码2 8位数据码8位数据码反码组成长按键不放发出的码波形序列如下图即将整个波形以周期108ms 进行重复17 DATA-6BITDATA-6BIT是一种常见种常见的红外遥控编码格式该格式来源于RM-301C RM-402C195Features 基本特点16位数据码2脉宽调制方式PWM3载波38KHZ4逻辑位时间comModulation 调制逻辑0Logical0是由440us的38KHZ载波和1540us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度逻辑1Logical1是由440us的38KHZ载波和3362us的无载波间隔组成Protocol 协议从上图中可看到DATA-6BIT一帧码序列仅是由6位数据码组成长按键不放发出的码波形序列如下图即将第一帧波形以周期28ms进行重复18 CUSTUM6BITCustum-6BIT是一种常见的红外遥控编码格式该格式出现在CL311URC-8910RM-123CRM-139S148ZC-18A600-917ZC-18A400-481RM-301CINTER-DIGI-SAT VT3620AVT3630RM-402CFeatures 基本特点16位数据码2脉宽调制方式PWM3载波38KHZ4逻辑位时间com19 M9148-1M9148-1是一种常见的编码格式Features 基本特点13位地址码1位控制码8位数据码2脉宽调制方式PWM3载波38168KHZ4逻辑位的时间长度是1848msModulation 调制1逻辑0Logical0是由462us的38168KHZ载波和1386us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由1386us的38168KHZ载波和462us的无载波间隔组成Protocol 协议从上图可以看到M9148-1一帧码序列是由3位地址码1位控制码8位数据码长按键不放发出的码波形序列如下图就是将第一帧波形以周期56023ms进行重复20 SC3010RC-5SC3010 RC-5是一种常见的编码格式该格式来源于众合万能遥控器RM-139S码组号为013208215216218及万能遥控器祝成ZC-18A码组号为682684685854691709Features 基本特点12位控制码1为翻转码5位地址码6位数据码2脉宽调制方式PWM3载波38KHZ4逻辑位的时间长度是1688msModulation 调制1逻辑0Logical0是由844us的38 KHZ载波和844us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由844us的38KHZ载波和844us的无载波间隔组成Protocol 协议从上图可以看到SC3010 RC-5一帧码序列是由2位控制码1位翻转码5位地址码6位数据码长按键不放发出的码波形序列如下图就是将第一帧波形以周期127156ms进行重复21 M50560-1 40KM50560-1 40K 是一种常见的编码格式该格式来源于万能遥控器众合RM139-S码组号为040069076083068125127268及万能遥控器众合RM-33C码组号为0016006700720073Features 基本特点18位地址码8位数据码2脉宽调制方式PWM3载波40KHZ4逻辑位的时间长度是1ms或2msModulation 调制1逻辑0Logical0是由500us的40KHZ载波和500us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由500us的40KHZ载波和1500us的无载波间隔组成Protocol 协议从上图可以看到M50560-1 40K 一帧码序列是由8位地址码8位数据码长按键不放发出的码波形序列如下图就是将第一帧波形以周期678ms进行重复22 SC50560-B1SC50560-B1是一种常见的编码格式Features 基本特点15位数据码2脉宽调制方式PWM3载波38KHZ4逻辑位的时间comModulation 调制1逻辑0Logical0是由520us的38KHZ载波和2080us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由520us的38KHZ载波和4160us的无载波间隔组成Protocol 协议从上图可以看到SC50560-B1一帧码序列是由5位数据码长按键不放发出的码波形序列如下图就是将第一帧波形以周期120ms进行重复23 C50560-002PC50560-002P是一种常见的编码格式该格式来源于视贝万能DVB遥控器码组号为195Features 基本特点18位地址码8位数据码2脉宽调制方式PWM3载波38KHZ4逻辑位的时间comModulation 调制1逻辑0Logical0是由520us的38KHZ载波和520us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由520us的38KHZ载波和1560us的无载波间隔组成Protocol 协议从上图可以看到M50560-002P 一帧码序列是由8位地址码8位数据码长按键不放发出的码波形序列如下图就是将第一帧波形以周期36006ms进行重复24 M50119P-01 38KM50119P-01 38K 是一种常见的编码格式Features 基本特点14位地址码4位地址码的相同码6位数据码6位数据码的相同码2脉宽调制方式PWM3载波38KHZ4逻辑位的时间comsModulation 调制1逻辑0Logical0是由967us的38KHZ载波和967us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由967us的38KHZ载波和2901us的无载波间隔组成Protocol 协议从上图可以看到M50119P-01 38K 一数据帧码序列是由4位地址码6位数据码4位地址码相同码6位数据码相同码一重复帧由4位地址码相同码长按键不放发出的码波形序列如下图就是将第一帧波形以周期385156ms进行重复25 M50119P-1 40KM50119P-1 40K 是一种常见的编码格式该格式来源于OMEGA万能遥控器码组号为0041Features 基本特点13位地址码7位数据码2脉宽调制方式PWM3载波40KHZ4逻辑位的时间长度是1ms或2msModulation 调制1逻辑0Logical0是由500us的40KHZ载波和500us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由500us的40KHZ载波和1500us的无载波间隔组成Protocol 协议从上图可以看到M50119P-1 40K 一帧码序列是由3位地址码7位数据码长按键不放发出的码波形序列如下图就是将第一帧波形以周期275ms进行重复26M50119PM50119P是一种常见的编码格式该格式来源于OMEGA万能遥控器码组号为0384及众合万能遥控器RM-139S码组号为041Features 基本特点13位地址码7位数据码2脉宽调制方式PWM3载波3791KHZ4逻辑位的时间长度是1ms或2msModulation 调制1逻辑0Logical0是由500us的379KHZ载波和500us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由500us的379KHZ载波和1500us的无载波间隔组成Protocol 协议从上图可以看到M50119P一帧码序列是由3位地址码7位数据码长按键不放发出的码波形序列如下图就是将第一帧波形以周期30ms进行重复27IRT1250C5D6-02 0HzIRT1250C5D6-02 0Hz 是一种常见的编码格式Features 基本特点15位地址码6位数据码2脉宽调制方式PWM3载波无载波4逻辑位的时间comsModulation 调制1逻辑0Logical0是由16us的无载波和224us的无载波间隔组成图中表示的是无载波和无载波间隔的总长度2逻辑1Logical1是由16us的36KHZ载波和480us的无载波间隔组成Protocol 协议从上图可以看到IRT1250C5D6-02 0Hz 一帧码序列是由引导码0016ms的无载波和0732ms的间隔5位地址码6位数据码长按键不放发出的码波形序列如下图就是将第一帧波形以周期597251ms进行重复28HTS-C5D6PHTS-C5D6P是一种常见的编码格式该格式来源于OMEGA万能遥控器027*********Features 基本特点15位地址码6位数据码1位校验码2脉宽调制方式PWM3载波38KHZ4逻辑位的时间com4624msModulation 调制1逻辑0Logical0是由136us的38KHZ载波和1360us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由136us的38KHZ载波和2856us的无载波间隔组成3逻辑3Logical3是由136us的38KHZ载波和4488us的无载波间隔组成Protocol 协议从上图可以看到HTS-C5D6P一帧码序列是引导码coms的间隔5位地址码6位用户码1位校验码长按键不放后续发出波形如下长按键不放发出的码波形序列如下图就是将第一帧波形以周期89381ms进行重复29Gemini-C17 3136KGemini-C17 3136K 是一种常见的编码格式该格式主要来源于OMEGA万能遥控器码组号分别为013402250289032203970400045104580859Features 基本特点110位地址码引导码的相同码10位数据码2脉宽调制方式PWM3载波304KHZ4逻辑位的时间长度是106msModulation 调制1逻辑0Logical0是由530us的304KHZ载波和530us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由530us的304KHZ载波和530us的无载波间隔组成Protocol 协议从上图可以看到Gemini-C17 3136K 用户帧码序列是由引导码com的间隔10位地址码数据帧码序列由引导码的相同码10位数据码长按键不放后仍发出如下波形长按键不放出码的波形序列如下图就是将第一帧以周期19997ms 进行重复30Gemini-C17 3136K -2Gemini-C17 3136K -2是一种常见的编码格式该格式主要来源于OMEGA万能遥控器码组号分别为01350376Features 基本特点116位地址码 16位数据码2脉宽调制方式PWM3载波31KHZ4逻辑位的时间长度是106msModulation 调制1逻辑0Logical0是由530us的31KHZ载波和530us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由530us的31KHZ载波和530us的无载波间隔组成Protocol 协议从上图可以看到Gemini-C17 3136K -2用户帧码序列是由引导码com的间隔16位地址码数据帧码序列由引导码com的间隔16位数据码长按键不放后仍发出如下波形长按键不放出码的波形序列如下图就是将第一帧以周期21609ms 进行重复31data6bit-adata6bit-a是一种常见的编码格式该格式来源于祝成万能遥控器ZC-18A码组号673Features 基本特点16位数据码2脉宽调制方式PWM3载波333KHZ4逻辑位的时间comsModulation 调制1逻辑0Logical0是由576us的333KHZ载波和1820us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由576us的333KHZ载波和4200us的无载波间隔组成Protocol 协议从上图可以看到data6bit-a一帧码序列是6位数据码长按键不放发出的码波形序列如下图就是将第一帧波形以周期58092ms进行重复32data6bit-cFeatures 基本特点16位数据码2脉宽调制方式PWM3载波20KHZ4逻辑位的时间长度是2 ms或4msModulation 调制1逻辑0Logical0是由1000us的20KHZ载波和1000us的无载波间隔组成图中表示的是有载波和无载波间隔的总长度2逻辑1Logical1是由1000us的20KHZ载波和3000us的无载波间隔组成Protocol 协议从上图可以看到data6bit-c一帧码序列是6位数据码构成长按键不放发出的码波形序列如下图就是将第一帧波形以周期725ms进行重复33X-Sat ProtocolX-Sat ProtocolI call this the X-Sat protocol because it is used in the X-Sat CDTV 310 Satellite receiver made by the French company Xcom This protocol is probably also used in other X-Sat receivers but I have no means to verify that I havent seen this protocol anywhere else but that doesnt guarantee that it is unique to the X-Sat brandFeatures8 bit address and 8 bit command lengthPulse distance modulationCarrier frequency of 38kHzBit time of 1ms or 2msModulationThe X-Sat protocol uses pulse distance encoding of the bits Each pulse is a 526祍 long 38kHz carrier burst about 20 cycles A logical "1" takes 20ms to transmit while a logical"0" is only 10ms The recommended carrier duty cycle is 14 or 13ProtocolThe picture above shows a typical pulse train of the X-Sat protocol With this protocol the LSB is transmitted first In this case Address 59 and Command 35 is transmitted A message is started by a 8ms AGC burst which was used to set the gain of the earlier IR receivers This AGC burst is then followed by a 4ms space which is then followed by the Address and Command A peculiar property of the X-Sat protocol is the 4ms gap between the address and the command The total transmission time is variable because the bit times are variableAn IR command is repeated 60ms for as long as the key on the remote is held down34Philips RECS-80 Protocol 38kHz carrierThis protocol is designed by Philips and transmitters are produced by Philips SAA3008 and ST M3004 Personally I have never seen this protocol being used in real applications All information on this page is derived from the data sheet of the Philips SAA3008 and the ST M3004 10624pdfThere are 2 small differences between the two competitor ICs The Philips IC has two modes of operation one which iscompatible with the ST chip and one which can handle up to 20 sub-system addresses The ST chip has the capability of switching the modulation carrier offFeatures7 or 20 sub-system addresses 64 commands per sub-system address1 or2 toggle bits to avoid key bouncePulse distance modulationCarrier frequency of 38kHz or unmodulatedBit time logic "0" is 51ms logic "1" is 76ms 455kHz OscillatorCommand repetition rate 1215ms 55296 periods of the main oscillatorManufacturer Philips STModulation 13 duty cycleNormal Protocol The drawing below shows a typical pulse train of a normal RECS-80 message This example transmits command 36 to address 4Usually the first pulse is a reference pulse with a value of "1" The receiver may use this bit to determine the exact bit lengthThe next bit is a toggle bit Its value is toggled whenever akey is released which results in a different code every time a new key is pressed This allows the receiver to discriminate between new key presses and key repetitionsOnly the ST chip M3004 can disable its carrier in which case the REF pulse is interpreted as a second toggle bit The 2-bit toggle value is incremented every time a key is released Thus only in this mode there is no real REF pulseThe next 3 pulses S2 to S0 represent the sub-system address bits sent with MSB first This would allow for 8 different sub-system addresses but both the SAA3008 and the M3004 can only generate 7 sub-system addresses in normal mode Next come the 6 command bits F to A also sent with MSB first allowing for 64 different commands per sub-system addressThe pulse train is terminated by a last pulse otherwise there is no way to know the duration of bit AThe entire command is repeated with unchanged toggle bits for as long as the key is held down The repetition rate is 1215ms 55296 periods of the oscillatorAddress assignments are a bit odd with this protocol You can not simply convert the binary value to a decimal value Below you see a table explaining the relationship between the binary and decimal sub-system address valuesExtended Protocol If you need more than 7 sub-system addresses you can use the extended protocol which allows 13 additional sub-system addresses only if you use the SAA3008 The drawing below shows an extended message This example transmits command 36 to address 10The first two pulses are a special start sequence The total duration of these pulses is equal to a normal "1" period The next bit is a toggle bit Its value is toggled whenever a key is released which results in a different code every time a new key is pressed This allows the receiver to discriminate between new key presses and key repetitionsThe next 4 pulses S3 to S0 represent the sub-system address bits This would allow for an additional 16 different sub-system addresses although the SAA3008 can only generate 13 additional sub-system addresses in this mode Next come the 6 command bits F to A also sent with MSB firstThe pulse train is terminated by a last pulse otherwise there is no way to know the duration of bit AThe entire command is repeated with unchanged toggle bits for as long as the key is held down The repetition rate is 1215ms 55296 periods of the oscillatorAddress assignments are a bit odd with this protocol Youcan not simply convert the binary value to a decimal value Below you see a table explaining the relationship between the binary and decimal sub-system address values35 Philips RC-MM ProtocolRC-MM was defined by Philips to be a multi-media IR protocol to be used in wireless keyboards mice and game pads For these purposes the commands had to be short and have low power requirementsWhether the protocol is actually used for these purposes today is unknown to me What I do know is that some Nokia digital satellite receivers use the protocol 9800 series Features 12 bits or 24 bits per messagePulse position coding sending 2 bits per IR pulseCarrier frequency of 36kHzMessage time ranges from 35 to 65 ms depending on data contentRepetition time 28 ms 36 messages per secondManufacturer PhilipsTransmission timingIn this diagram you see the most important transmission times The message time is the total time of a message counting form the beginning of the first pulse until the end of the lastpulse of the message This time can be 35 to 65 ms depending on the data content and protocol usedThe signal free time is the time in which no signal may be sent to avoid confusion with foreign protocols on the receivers side Philips recommends 1 ms for normal use or 336 ms when used together with RC-5 and RC-6 signals Since you can never tell whether a user has other remote controls in use together with an RC-MM controlled device I would recommend always to use a signal free time of 336 msThe frame time is the sum of the message time and the signal free time which can add up to just about 10 ms per message Finally the repetition time is the recommended repetition time of 27778 ms which allows 36 messages per second This is only a recommendation and is mainly introduced to allow other devices to send their commands during the dead times No provision is made for data collisions between two or more remote controls This means that there is no guarantee that the messages get acrossModulationWith this protocol a 36 kHz carrier frequency is used to transmit the pulses This helps to increase the noise immunity at the receiver side and at the same time it reduces powerdissipated by the transmitter LED The duty cycle of the pulses is 13 or 14Each message is preceded by a header pulse with the duration of 4167 μs 15 pulses of the carrier followed by a space of 2778 μs 10 periods of the carrier This header is followed by 12 or 24 bits of dataBy changing the distance between the pulses two bits of data are encoded per pulse Below you find a table with the encoding timesProtocol RCMM comes in 3 different flavours called modes Each mode is intended for a particular purpose and differs mainly in the number of bits which can be used by the application All data is sent with MSB firstThe 12 bit mode is the basic mode and allows for 2 address bits and 8 data bits per device family There are 3 different device families defined keyboard mouse and game pad The 2 address bits provide for a way to use more than 1 device simultaneously The data bits are the actual payload data The 24 bit mode also know as extended mode allows more data to be transmitted per message For instance for multi-lingual keyboards or a high resolution mouseIn the OEM mode the first 6 bits are always 0 0 0 0 1 1 The。
遥控编码电路

简介:
SC2262 是CMOS 工艺制造的低功耗通用编码电路,它和SC2272 配对使用, 最多有12 位三态编码。电路具有省电模式,可用于无线电和红外线遥控发射等 应用。
特点:
●CMOS工艺制造,低功耗 ●工作电压范围宽:2V~15V ●数据A 最多可达6 位 用
●外部应用线路元器件少 ●地址A 和数据D 位通用 ●红外遥控和无线电遥控应
电气参数( 除非特殊说明 Tamb=25℃ VDD=12.0V )
参数 电源电压 电源电流
Dout 输出 驱动电流
Dout 输出 陷电流
符号
测试条件
Vcc
Icc
Vcc=12V 振荡器停振 A0~A11 开路
Vcc=5V, VOH=3V
IOH
Vcc=8V, VOH=4V
Vcc=12V, VOH=6V
Vcc=5V, VOL=3V
参数表:极限参数( Ta=25℃ )
参数 电源电压 输入电压 输出电压 最大功耗 (Vcc=12V) 工作温度 贮存温度
符号 Vcc Vi Vo
Pa
Topr Tstg
参数范围 2~15.0
-0.3~Vcc+0.3 -0.3~Vcc+0.3
300
-20~+70 -40~+125
单位 V V V
mW
℃ ℃
应用说明:
地址:深圳市福田区滨河路彩虹新都彩云阁 18B
联系人:姜生,王生
TEL:13316852844,13760285144 FAX:0755-88304213
IOL
Vcc=8V, VOL=4V
Vcc=12V, VOL=6V
SC2272 遥控解码电路

遥控解码电路SC2272 是与SC2262 配对使用的一款通用遥控解码集成电路。
采用CMOS工艺制造,它最大拥有12 位的三态地址管脚,可支持多达531441(或312)个地址的编码。
因此极大的减少了码的冲突和非法对编码进行扫描以使之匹配的可能性。
特 点z工作电压范围宽(Vcc=4~6V)z低功耗和较强的噪声抑制能力z最大设置为12 位三态地址管脚或6 位数据管脚z外接双端电阻的振荡器z数据输出有锁存和瞬态两种输出类型应用范围z家庭汽车安全系统z车库控制z遥控玩具z遥控风扇z其他工业遥控管脚图SOP20封装 10和11脚悬空型号标号:SC2272-XYZ注:X表示输出类型,分为M和L,M为瞬态输出,L为锁存输出;Y数值代表有几位数据输出(0位缺省);Z表示封装形式,分为缺省(DIP18)和S(SOP20)。
管脚说明管脚管脚I/O 功能说明名称标号A0~A5 1~6 I A0~A5 码地址管脚。
通过检测这六条三态的管脚来确定bit0~bit5 的编码波形。
每个管脚均分别可置为“0”、“1”或“f”(悬空)A6/D5~A11/D07~810~13I/OA6~A11 码地址管脚或D5~D0 数据输出管脚。
根据SC2272 的规格不同,这六条管脚即可作为高位码地址管脚,也可作为数据输出管脚。
当这些管脚作为码地址管脚使用时,每个管脚可分别置为“0”、“1”或“f”(悬空)。
当作为数据输出管脚使用时,在同时符合以下两个条件的前提下,输出为“1”(Vcc),否则为“0”(Vss)。
(1)所接受的地址码波形与码地址输入端的设置匹配(2)相应位接收到的数据输出置为“1”。
Din 14 I 数据输入管脚,接收到的编码信号由此脚串行输入OSC1 16 I 振荡器第一外接点OSC2 15 O 振荡器第二外接点此二端外接电阻,用以确定振荡频率VT 17 O 有效传输确认,高电平有效。
当SC2272 收到有效信号时,VT 变为高电平Vcc 18 -- 电源正端Vss 9 -- 电源负端DD直流特性参数( 除特殊说明外,Tamb=25℃)参数 符号 测试条件 最小值典型值 最大值 单位电源电压 Vcc-- 4 -- 6 V静态电流 ISBVcc=5V振荡器停振A0~A11 开路-- 0.5 1 μAD0~D5输出驱动电流I OH Vcc=5V, V OH=3V-3 -- -- mA D0~D5输出陷电流I OL Vcc=5V, V OL=3V 2 -- -- mADin输入高电平V IH-- 0.7Vcc-- Vcc V Din输入低电平V IL-- 0-- 0.3Vcc VVT输出 驱动电流 I OH Vcc=5V,V OH=3.5V 3 6 -- mA极限参数参数 符号 参数范围 单位电源电压 Vcc 4.0~6.0V输入电压 Vi V SS-0.3~V cc+0.3V输出电压 V o V SS -0.3~ V cc +0.3V最大功耗(Vcc=15V)Pa300mW 工作温度 Topr-20~+70℃贮存温度 Tstg-40~+125℃内部电路功能描述SC2272 对从Din 端子送入的信号进行解码。
(完整版)hcs301遥控发射器电路的工作原理与检修方法
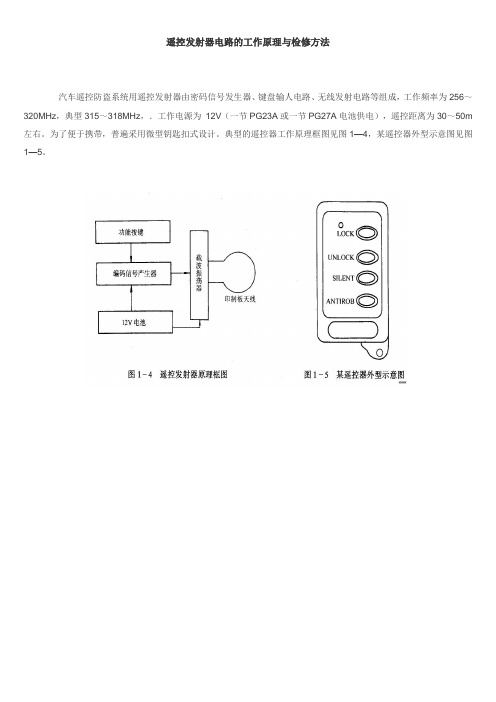
遥控发射器电路的工作原理与检修方法汽车遥控防盗系统用遥控发射器由密码信号发生器、键盘输人电路、无线发射电路等组成,工作频率为256~320MHz,典型315~318MHz,.工作电源为12V(一节PG23A或一节PG27A电池供电),遥控距离为30~50m 左右。
为了便于携带,普遍采用微型钥匙扣式设计。
典型的遥控器工作原理框图见图1—4,某遥控器外型示意图见图1—5。
遥控发射器根据编码信号的不同加密方式,可以分为固定式加密方式和滚动码(跳码)加密方式两大类。
下面具体介绍一些典型电路工作原理和检修方法。
一、固定码遥控发射器电路原理虽然各厂家使用的编(解)码芯片型号不同,但遥控器的电路原理基本相同,下面介绍几种不同型号芯片的遥控器电路原理。
例1 以TWH9256为编码芯片的遥控发射器以TWH9256为编码芯片的遥控发射器电路原理见图1—6。
TWH9256的各引脚功能如下:①~⑧脚为编码地址位,⑨脚接地,⑩脚接电源,⑩~⑩脚为数据输入,⑩脚为使能端(低电平有效),⑩、⑩脚为芯片时钟振荡,R6为外接振荡电阻,⑩脚为数据输出。
由S1~S4、二极管VDl~VD4、电阻R2~R5组成了按键开关阵列电路,控制编码集成电路ICI电源供给(VDD)和数据位130~D3(高电平有效)。
在平时,S1~S4处于常开状态,IC1无工作电源,数据输出端为低电平,发射管V1的基极无直流偏置,V1处于截止状态,遥控器几乎不消耗电流。
当S1~S4中任何一个按键被按下接通时,12V电源通过、按键开关接通ICI的数据输入端,并通过二极管阵列供给ICI(TWH9256)的电源端和编码地址位,IC1开始工作,从⑩脚输出串行数字编码脉冲信号,通过RI送入无线发射电路。
无线发射电路由晶体管V1、C1、C2、C3、L1、C5及印制板电感L00组成,在编码集成电路ICI的⑩脚输出的串行数字脉冲信号控制下,产生高频键控调幅无线电信号,通过印制板天线L00发射出去。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
主要特点
* 很宽的工作电压范围(VCC=3~15V) * 很低的功耗和较强的噪声抑制能力 * 最大到12位三状态地址管脚或6位数据管脚 * 外接一只电阻的振荡器 * 有锁存型和瞬态输出型
应用
* 家庭汽车安全系统 * 车库控制 * 遥控风扇 * 遥控玩具 * 其他工业遥控
产品规格分类
杭州士兰微电子股份有限公司 http:
杭州士兰微电子股份有限公司 http:
版本号:1.0 2004.08.03 共10页 第5页
SC5262
2. 红外工作方式 在红外工作方式下,各主要功能与上面描述的基本相似,主要差异在于输出波形中含有
38KHz的载波。详见以下描述:
位码 位码同样分为"0"、"1"或"f",并且调制在38KHz的载波上。它们的波形见下图:
12a
12a
4a
这里,a=时钟振荡周期
同步位的长度是4个AD位的长度,含一个1/8AD位宽度的脉冲。详见下图:
字码 一组位码构成了字码,字码由12位AD位码再紧跟1位SYNC位码构成。12位AD位码由相应的
A0~A5和A6/D5~A11/D0端在发射时的状态确定。当SC5262使用在数据形式时,地址码位相应会 减少。例如,在3位数据码位形式下,有9位地址码位,它们的发送格式如下:
15 degree
版本号:1.0 2004.08.03 共10页 第9页
封装外形图(续)
SOP-20-375-1.27
SC5262
单位:毫米
10.2±0.4 7.6±0.3 9.525
1.27
0.4
12.7±0.25
11.43
0.25±0.05 3.1MAX
MOS电路操作注意事项:
静电在很多地方都会产生,采取下面的预防措施,可以有效防止MOS电路由于受静电放电影 响而引起的损坏:
0.02 0.3 μA
VCC=5V,VOH=3V
-3
mA
IOH VCC=8V,VOH=4V
-6
mA
VCC=12V,VOH=6V
-10
mA
VCC=5V ,VOL=3V
2
mA
IOL VCC=8V ,VOL=4V
5
mA
Vcc=12V ,VOL=6V
9
mA
杭州士兰微电子股份有限公司 http:
操作流程图
电源上电
待机模式
杭州士兰微电子股份有限公司 http:
否 TE有效? 是
发射4个字的地址/ 数据码
否 TE有效? 是
版本号:1.0 2004.08.03 共10页 第6页
SC5262
典型应用电路图
LED 10 H
1N4148 ×4
SW0 SW1 SW2 SW3
杭州士兰微电子股份有限公司 http:
版本号:1.0 2004.08.03 共10页 第3页
SC5262
功能描述
SC5262将设置在A0~A5和A6/D5~A11/D0端子上的码地址和数据编成一个特殊的波形,当 TE 端为低电平时,在Dout端送出该编码波形。该信号可通过射频调制发射,也可用红外发射,所发 射的射频或红外信号经射频或红外接收、解调、整形,还原成编码波形,然后由SC5272进行解 码,并控制相应的输出。以上过程完成了一个完整的遥控编码和解码过程。
18引线 20引线
封装
封装
1~6
1~6
7~8 10~13
7~8 12~15
14
16
15
17
16
18
17
19
18
20
9
9
--
10~11
管脚 名称
说
明
A0~A5
A6/D5~ A11/D0
TE
OSC1 OSC2 Dout
Vcc Vss NC
0#~5#码地址管脚。SC5262通过检测这六条三状态的管脚来 确定位0~位5的编码波形。每个管脚均可置为"0"、"1"或"f"(悬 空) 6#~11#码地址管脚或5#~0#数据管脚。SC5262通过检测这六 条三状态的管脚来确定位6~位11的编码波形。当它们用作地 址管脚时,可分别置为"0"、"1"或"f"(悬空);当它们用作数据 管脚时,只能置为"0"或"1"。 允许发射,低电平有效。当此管脚接低电平时,SC5262从 Dout端送出编码的波形。 振荡器第一外接点 此二端外接一个电阻,以确定SC5262 振荡器第二外接点 的基本振荡频率。 数据输出管脚,编码后的波形由此管脚输出。当SC5262不发 射数据时,Dout输出低电平(Vss) 电源正端 电源负端 空脚
300 -20 ~ +70 -40 ~ +125
单位 V V V
mW °C °C
电气参数(除非特殊说明,Tamb=25°C,VDD=12.0V)
参数 电源电压 电源电流 Dout 输出驱动电流
Dout 输出陷电流
符号
测试条件
最小值 典型值 最大值 单 位
VCC
3
15 V
ICC VCC=12V振荡器停振,A0~A11开路
160
OSC
20
"0"
60
"1"
"f"
Sync
620
注: =2 倍时钟周期
字码 字码由位码构成,构成方式同射频方式下的字码构成方式。
帧码 同样地,帧码由字码构成,构成方式同射频方式下的帧码构成方式。
振荡器 红外型应用的振荡器的频率为两倍的载波频率。所以,振荡器的频率必须保持在76KHz,在
OSC1和OSC2端的外接电阻值推荐为430K~470KΩ,必须注意载波的占空比为50%。
封装外形图
DIP-18-300-2.54
SC5262
单位:毫米
DIP-20-300-2.54
2.54
0
6.60±0.25
0.51MIN
1.27 26.4±0.3
0.51
杭州士兰微电子股份有限公司 http:
3.00MIN
4.36MAX
9位地址码位 3位数据码位 同步位
SC5262/5272最多有12位地址码位(含6位地址/数据码位),下图显示了这码位和它们对应 的管脚。
杭州士兰微电子股份有限公司 http:
版本号:1.0 2004.08.03 共10页 第4页
SC5262
A0 A1 A2 A3 A4 A5 A6/D5 A7/D4 A8/D3 A9/D2 A10/D1 A11/D0
+12V
2.7k ×4
25pF 5pF
MPSH10
4.7k
4.7M
10k ×4
18 17 16 15 14 13 12 11 10
SC5262
123456789
(1) UHF频段四数据发射线路
LED 10 H
25pF MPSH10
5pF 4.7k
4.7M SW
18 17 16 15 14 13 12 11 10
SC5262
312种编码方案的遥控编码电路
描述
SC5262是与SC5272配对使用的一块遥控编码专用集成电 路。它将数据管脚和地址管脚编到一串列码中去以适合射频或红 外调制发射。SC5262采用CMOS工艺制造,最大拥有12位的三 状态地址管脚,可提供多达531441(或312)个地址编码,因此 极大地减少了码的冲突和非法对编码进行扫描以使匹配的可能 性。
版本号:1.0 2004.08.03 共10页 第1页
内部框图
SC5262
极限参数(Tamb=25°C)
参数 电源电压 输入电压 输出电压 最大功耗(Vcc=12V) 工作温度 贮存温度
符号 VCC VIN VOUT Pa Topr Tstg
参数范围 -0.3 ~ 16.0
-0.3 ~ VCC+0.3 -0.3 ~ VCC+0.3
SC5262
123456789
+12V
(2) UHF频段零数据(全为地址码)发射线路
杭州士兰微电子股份有限公司 http:
版本号:1.0 2004.08.03 共10页 第7页
典型应用电路图(续)
SC5262
LED
SW
10 H
25pF 5pF
4.7M
+12V
MPSH10
• 操作人员要通过防静电腕带接地。 • 设备外壳必须接地。 • 装配过程中使用的工具必须接地。 • 必须采用导体包装或抗静电材料包装或运输。
杭州士兰微电子股份有限公司 http:
版本号:1.0 2004.08.03 共10页 第10页
1. 射频工作方式
位码 位码是编码波形的基本单元,可分为AD位(地址、数据)和SYNC位(同步)。 根据相应端子电平的低、高,或悬空状态,AD位可分别置为"0"、"1"或"f",每位波形由两个脉 冲周期构成,每个脉冲周期含16个时钟周期,详见下图:
OSC 位 "0" 位"1" 位"f"
32a a
4a
位 码 A0~A5 和 A6/D5~A11/D0 由 A0~A5 和 A6/D5~A11/D0 管 脚 的 状 态 决 定 。 例 如 , 当 A0 ( 1 脚)置为高电平(Vcc)时,相应的位码A0合成出"1"码。同样地,当A0(1脚)置为低电平或悬空 时,位码A0相应地合成出"0"或"f"码。