MCU50插针退针器
acplm50l 原理 -回复

acplm50l 原理-回复ACPLM50L 原理ACPLM50L是一种广泛应用于工业领域的光电隔离器件,其原理是基于光电耦合器(Optocoupler)的工作原理。
光电耦合器是一种能够将输入端的电信号转换成光信号,并通过光耦合器中的光电二极管将光信号转换成输出端的电信号的器件。
ACPLM50L主要由光电二极管(Photodiode)、光电晶体管(Phototransistor)和输出控制电路组成。
光电二极管负责将输入电信号转换成光信号,光电晶体管负责将光信号转换成输出电信号,输出控制电路则用于控制输出电路的开关状态。
在ACPLM50L中,光电二极管被放置在输入端,其内部由PN结构组成,当输入信号电压施加在PN结上时,PN结会产生电场,电场会改变PN 结内的载流子浓度,从而影响载流子的流动。
当载流子流动时,光电二极管的阴阳极之间会产生压差,导致光电二极管产生正面的制动电压,并在其连结端产生光信号。
接着,光信号通过光电晶体管中的光电二极管转换成电信号。
光电晶体管中的光电二极管和晶体管是通过共用一体结构实现的,当光信号照射到光电二极管时,光电二极管会产生正电荷。
正电荷被送到晶体管的基极,从而使晶体管的电流变化,最后通过输出接口输出。
在ACPLM50L中,输出控制电路用于控制输出端的开关状态。
输出控制电路通过对光电晶体管的驱动,来控制输出电路的开闭。
当输入信号的电压高于设定阈值时,输出电路开启,输出端产生正常的电信号;当输入信号的电压低于设定阈值时,输出电路关闭,输出端不产生电信号。
输出控制电路的设计能够提供有效的电隔离效果,使得输入端和输出端之间的电信号相互隔离,从而有效地防止干扰。
ACPLM50L具有高精度、高速度和高可靠性的特点,被广泛应用于各种测量、控制和通信系统中。
其原理简单易懂,并且具有较强的抗干扰能力,能够有效保护输入和输出端的电路。
另外,ACPLM50L还具有小尺寸、低功耗和长寿命等优点,使其成为工业领域中不可或缺的元件。
北京捷麦通信器材有限公司 R4050 开关量模块用户手册说明书
2013年10月北京捷麦通信器材有限公司R4050开关量模块用户手册 DATA ACQUISITION MODULES *************目录1概述 (3)1.1 特点 (3)1.2 外观和安装 (3)1.3 技术指标 (4)1.4指示灯状态 (4)2 电路连接 (5)2.1 输入电路连接 (5)2.2 输出电路连接 (6)2.3 通信电路的连接 (7)2.4 模块的输出值 (7)3 通用指令和模块的基本设置 (7)3.1 指令的基本格式 (7)3.2 设置模块配置-%AANNTTCCFF (9)3.3读配置信息-$AA2 (10)3.4读版本信息-$AAF (10)3.5 读复位状态-$AA5 (11)3.6 读模块名-$AAM (11)3.7写模块名-~AAO(数据) (12)4 采集和输出指令 (13)4.1同步采样-#** (13)4.2读同步数据-$AA4 (14)4.3数字输出-#AABBDD (14)4.4设置数字输出-@AA(数据) (15)4.5读数字输出/输入状态-$AA6 (16)4.6读数字输入/输出状态-@AA (16)4.7 读锁存状态-$AALS (17)4.8 清除锁存状态-$AAC (18)4.9 读入计数值-#AAN (19)4.10 清计数器-$AACN (19)5 遥控和报警指令及应用 (20)5.1 模式 (20)5.2读模块模式-#AAM (22)5.3设置模块模式-#AAMAB (23)5.4 读遥控目的地址-#AAR (24)5.5写遥控目的地址-#AAR(数据) (24)5.6读重发间隔时间-#AAT (25)5.7设置重发间隔时间-#AATDD (25)6 看门狗的使用和指令 (26)6.1 ~** (26)6.2 ~AA0 (27)6.3 ~AA1 (27)6.4~AA2 (28)6.5 ~AA3EVV (28)6.6 ~AA4V (29)6.7 ~AA5V (30)————————————————————————————————————————————————附件1:ASCII码对照表 (31)————————————————————————————————————————————————1概述1.1 特点R4050模块是R4000系列采集模块中的开关量输入输出模块,具有7路电压开关量输入,8路晶体管集电极开路输出。
Microchip技术(微芯片技术)DS50003501A-页1:电子拨码按键接口引脚配置指南说明书
Hall Interface v4.2 User GuideIntroduction (Ask a Question)Brush Less DC (BLDC) motors are fitted with digital Hall sensors that provides rotor information for commutationof phases. The Hall sensors are used for block commutation of BLDC phases and provide rotor position with poor resolution. Block commutation has drawbacks like torque ripple and reduced efficiency. It is proven that vector control gives the best performance for the BLDC motor in terms of efficiency and torque ripple. However, because of poor angle resolution Hall sensors cannot be used for vector control. The Hall interface block generates high resolution angle from the low resolution angle provided by Hall sensors. It also computes the speed of the motor based on Hall signals.Summary (Ask a Question)The following table provides a summary of the Hall Interface characteristics.Table 1. Hall Interface CharacteristicsFeatures (Ask a Question)Hall Interface has the following key features:•Computes the raw angle from the hall inputs•Computes the filtered speed from the angleImplementation of IP Core in Libero Design Suite (Ask a Question)IP core must be installed to the IP Catalog of the Libero SoC software. This is done automatically through the IP Catalog update function in the Libero SoC software, or the IP core is manually downloaded from the catalog. Once the IP core is installed in the Libero SoC software IP Catalog, the core is configured, generated, and instantiated within the SmartDesign tool for inclusion in the Libero project list.Device Utilization and Performance (Ask a Question)The following table lists the device utilization used for Hall Interface.Table 2. Hall Interface UtilizationImportant: 1.The data in this table is captured using typical synthesis and layout settings. CDR reference clocksource was set to Dedicated with other configurator values unchanged.2.Clock is constrained to 200 MHz while running the timing analysis to achieve the performancenumbers.Table of ContentsIntroduction (1)Summary (1)Features (1)Implementation of IP Core in Libero Design Suite (1)Device Utilization and Performance (2)1. Functional Description (4)1.1. Angle Generation (4)1.1.1. Speed Calculation (5)2. Hall Interface Parameters and Interface Signals (7)2.1. Inputs and Outputs Signals (7)3. Timing Diagrams (8)4. Testbench (9)4.1. Simulation (9)5. Revision History (11)Microchip FPGA Support (12)Microchip Information (12)The Microchip Website (12)Product Change Notification Service (12)Customer Support (12)Microchip Devices Code Protection Feature (12)Legal Notice (13)Trademarks (13)Quality Management System (14)Worldwide Sales and Service (15)1. Functional Description (Ask a Question)This section describes the implementation details of the Hall interface block.The following figure shows the system level block diagram of the Hall interface.Figure 1-1. System Level Block Diagram of Hall Interface BlockThe Hall interface block generates the rotor angle based on three Hall inputs:•The angle_out_raw_o output is the raw angle generated based on Hall events•The theta_output_o output is the smoothened interpolated angle•The hall_sensor_pol_i input is used to indicate, if the Hall signals are active high or active lowThe angle generated is used to determine the rotor speed. The clear_buffer_i input is used to clear the speed filterbuffer when the motor is stopped. The computed speed is filtered using a filter block. The filter block computation is triggered by the fil_trig_i input and the filter time constant is decided by the filter_factor_i input. The filtered speed is available at omega_out_o output, and the omega_done_o output (pulse of one clock cycle width) indicates the speed is ready for use by the subsequent blocks.1.1 Angle Generation (Ask a Question)A Hall event is a change of state of the Hall signal. In one cycle of the Hall signal, six Hall events can be detected.Each event indicates an angle movement of one sixth of the total cycle. This means that eachHall event indicates a change of 60° (electrical).For ripple free operation, the raw angle is smoothened by interpolation to obtain a finer angle. This angle is usedin the field oriented control (FOC) transformation. The following figure shows the Hall angle signals and the anglegenerated from these signals (assuming the Hall signals are active high).Figure 1-2. Hall Signals and Angle GenerationHall BHall CRaw Angle and Interpolated Angle(dotted)Hall AThe following figure shows the computed angle generation for the reverse direction of the active high Hall signals.Figure 1-3. Hall Signals and Angle Generation for Reverse DirectionHall AHall BHall CRaw Angle and Interpolated Angle(dotted)1.1.1 Speed Calculation (Ask a Question)The rotor speed is calculated based on the change of angle in a given time window. The time window varies based on the motor speed and the speed obtained is scaled appropriately.The Hall sensors provide the electrical angle of the rotor. The mechanical speed is affected by the number of pole pairs. The Hall interface block uses the number of pole pairs to compute the scaling factor. The speed factor is calculated as:Hall Interface Parameters and Interface Signals 2. Hall Interface Parameters and Interface Signals (Ask a Question)This section discusses the parameters in the Hall interface I/O signals.2.1 Inputs and Outputs Signals (Ask a Question)The following table lists the input and output ports of the Hall Interface block.Table 2-1. Input and Output Ports of Hall InterfaceTiming Diagrams 3. Timing Diagrams (Ask a Question)This section discusses Hall Interface timing diagrams.The following figure shows the timing diagram of Hall Interface.Figure 3-1. Hall Interface Timing DiagramCLOCKha_ihb_ihc_iomega_done_i4. Testbench (Ask a Question)A unified test-bench is used to verify and test Hall Interface called as user test-bench. Testbench is provided to checkthe functionality of the Hall Interface IP.4.1 Simulation (Ask a Question)The following steps describe how to simulate the core using the testbench:1.Open the Libero SoC application, click Libero SoC Catalog tab, expand Solutions-MotorControl2.Double-click Hall Interface, and then click OK. The documentation associated with the IP are listed underDocumentation.Important: If you do not see the Catalog tab, navigate to View Windows menu and click Catalogto make it visible.Figure 4-1. Hall Interface IP Core in Libero SoC Catalog3.On the Stimulus Hierarchy tab, right-click the testbench (hall_interface_tb.v), point to Simulate Pre-Synth Design, and then click Open Interactively.Important: If you do not see the Stimulus Hierarchy tab, navigate to View > Windows menu andclick Stimulus Hierarchy to make it visible.Figure 4-2. Simulating Pre-Synthesis DesignModelSim opens with the testbench file as shown in the following figure.Figure 4-3. ModelSim Simulation WindowImportant: If the simulation is interrupted due to the runtime limit specified in the .do file, use the run -all command to complete the simulation.Revision History 5. Revision History (Ask a Question)The revision history describes the changes that were implemented in the document. The changes are listed byrevision, starting with the most current publication.Table 5-1. Revision HistoryMicrochip FPGA Support (Ask a Question)Microchip FPGA products group backs its products with various support services, including Customer Service, Customer Technical Support Center, a website, and worldwide sales offices. Customers are suggested to visit Microchip online resources prior to contacting support as it is very likely that their queries have been already answered.Contact Technical Support Center through the website at /support. Mention the FPGA Device Part number, select appropriate case category, and upload design files while creating a technical support case.Contact Customer Service for non-technical product support, such as product pricing, product upgrades, update information, order status, and authorization.•From North America, call 800.262.1060•From the rest of the world, call 650.318.4460•Fax, from anywhere in the world, 650.318.8044Microchip Information (Ask a Question)The Microchip Website (Ask a Question)Microchip provides online support via our website at /. This website is used to make files and information easily available to customers. Some of the content available includes:•Product Support – Data sheets and errata, application notes and sample programs, design resources, user’s guides and hardware support documents, latest software releases and archived software•General Technical Support – Frequently Asked Questions (FAQs), technical support requests, online discussion groups, Microchip design partner program member listing•Business of Microchip – Product selector and ordering guides, latest Microchip press releases, listing of seminars and events, listings of Microchip sales offices, distributors and factory representativesProduct Change Notification Service (Ask a Question)Microchip’s product change notification service helps keep customers current on Microchip products. Subscribers will receive email notification whenever there are changes, updates, revisions or errata related to a specified product family or development tool of interest.To register, go to /pcn and follow the registration instructions.Customer Support (Ask a Question)Users of Microchip products can receive assistance through several channels:•Distributor or Representative•Local Sales Office•Embedded Solutions Engineer (ESE)•Technical SupportCustomers should contact their distributor, representative or ESE for support. Local sales offices are also available to help customers. A listing of sales offices and locations is included in this document.Technical support is available through the website at: /supportMicrochip Devices Code Protection Feature (Ask a Question)Note the following details of the code protection feature on Microchip products:•Microchip products meet the specifications contained in their particular Microchip Data Sheet.•Microchip believes that its family of products is secure when used in the intended manner, within operating specifications, and under normal conditions.•Microchip values and aggressively protects its intellectual property rights. Attempts to breach the code protection features of Microchip product is strictly prohibited and may violate the Digital Millennium Copyright Act.•Neither Microchip nor any other semiconductor manufacturer can guarantee the security of its code. Code protection does not mean that we are guaranteeing the product is “unbreakable”. Code protection is constantly evolving. Microchip is committed to continuously improving the code protection features of our products. Legal Notice (Ask a Question)This publication and the information herein may be used only with Microchip products, including to design, test,and integrate Microchip products with your application. Use of this information in any other manner violates these terms. Information regarding device applications is provided only for your convenience and may be supersededby updates. It is your responsibility to ensure that your application meets with your specifications. Contact yourlocal Microchip sales office for additional support or, obtain additional support at /en-us/support/ design-help/client-support-services.THIS INFORMATION IS PROVIDED BY MICROCHIP "AS IS". MICROCHIP MAKES NO REPRESENTATIONSOR WARRANTIES OF ANY KIND WHETHER EXPRESS OR IMPLIED, WRITTEN OR ORAL, STATUTORYOR OTHERWISE, RELATED TO THE INFORMATION INCLUDING BUT NOT LIMITED TO ANY IMPLIED WARRANTIES OF NON-INFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE, OR WARRANTIES RELATED TO ITS CONDITION, QUALITY, OR PERFORMANCE.IN NO EVENT WILL MICROCHIP BE LIABLE FOR ANY INDIRECT, SPECIAL, PUNITIVE, INCIDENTAL, OR CONSEQUENTIAL LOSS, DAMAGE, COST, OR EXPENSE OF ANY KIND WHATSOEVER RELATED TO THE INFORMATION OR ITS USE, HOWEVER CAUSED, EVEN IF MICROCHIP HAS BEEN ADVISED OF THE POSSIBILITY OR THE DAMAGES ARE FORESEEABLE. TO THE FULLEST EXTENT ALLOWED BY LAW, MICROCHIP'S TOTAL LIABILITY ON ALL CLAIMS IN ANY WAY RELATED TO THE INFORMATION OR ITS USE WILL NOT EXCEED THE AMOUNT OF FEES, IF ANY, THAT YOU HAVE PAID DIRECTLY TO MICROCHIP FOR THE INFORMATION.Use of Microchip devices in life support and/or safety applications is entirely at the buyer's risk, and the buyer agrees to defend, indemnify and hold harmless Microchip from any and all damages, claims, suits, or expenses resulting from such use. No licenses are conveyed, implicitly or otherwise, under any Microchip intellectual property rights unless otherwise stated.Trademarks (Ask a Question)The Microchip name and logo, the Microchip logo, Adaptec, AVR, AVR logo, AVR Freaks, BesTime, BitCloud, CryptoMemory, CryptoRF, dsPIC, flexPWR, HELDO, IGLOO, JukeBlox, KeeLoq, Kleer, LANCheck, LinkMD, maXStylus, maXTouch, MediaLB, megaAVR, Microsemi, Microsemi logo, MOST, MOST logo, MPLAB, OptoLyzer, PIC, picoPower, PICSTART, PIC32 logo, PolarFire, Prochip Designer, QTouch, SAM-BA, SenGenuity, SpyNIC, SST, SST Logo, SuperFlash, Symmetricom, SyncServer, Tachyon, TimeSource, tinyAVR, UNI/O, Vectron, and XMEGA are registered trademarks of Microchip Technology Incorporated in the U.S.A. and other countries.AgileSwitch, APT, ClockWorks, The Embedded Control Solutions Company, EtherSynch, Flashtec, Hyper Speed Control, HyperLight Load, Libero, motorBench, mTouch, Powermite 3, Precision Edge, ProASIC, ProASIC Plus, ProASIC Plus logo, Quiet- Wire, SmartFusion, SyncWorld, Temux, TimeCesium, TimeHub, TimePictra, TimeProvider, TrueTime, and ZL are registered trademarks of Microchip Technology Incorporated in the U.S.A.Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, Augmented Switching, BlueSky, BodyCom, Clockstudio, CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM, , Dynamic Average Matching, DAM, ECAN, Espresso T1S, EtherGREEN, GridTime, IdealBridge, In-Circuit Serial Programming, ICSP, INICnet, Intelligent Paralleling, IntelliMOS, Inter-Chip Connectivity, JitterBlocker, Knob-on-Display, KoD, maxCrypto, maxView, memBrain, Mindi, MiWi, MPASM, MPF, MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient Code Generation, PICDEM, , PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE, Ripple Blocker, RTAX, RTG4, SAM-ICE, Serial Quad I/O, simpleMAP, SimpliPHY, SmartBuffer, SmartHLS, SMART-I.S., storClad, SQI, SuperSwitcher, SuperSwitcher II, Switchtec, SynchroPHY, Total Endurance, Trusted Time, TSHARC, USBCheck, VariSense, VectorBlox, VeriPHY, ViewSpan, WiperLock, XpressConnect, and ZENA are trademarks of Microchip Technology Incorporated in the U.S.A. and other countries.SQTP is a service mark of Microchip Technology Incorporated in the U.S.A.The Adaptec logo, Frequency on Demand, Silicon Storage Technology, and Symmcom are registered trademarks of Microchip Technology Inc. in other countries.GestIC is a registered trademark of Microchip Technology Germany II GmbH & Co. KG, a subsidiary of Microchip Technology Inc., in other countries.All other trademarks mentioned herein are property of their respective companies.© 2023, Microchip Technology Incorporated and its subsidiaries. All Rights Reserved.ISBN: 978-1-6683-2142-3Quality Management System (Ask a Question)For information regarding Microchip’s Quality Management Systems, please visit /quality.Worldwide Sales and Service。
信捷编码器伺服插头50针引脚定义

信捷编码器伺服插头50针引脚定义当我们谈论编码器时,信捷编码器无疑是一个值得关注的品牌。
而在信捷编码器中,50针插头引脚定义更是一个需要深入了解的主题。
今天,我将带大家深入探讨信捷编码器伺服插头50针引脚定义,希望通过本文的阐述,能够让大家对这一主题有更加全面、深刻的理解。
1. 引言信捷编码器在伺服系统中起着至关重要的作用,而50针插头引脚定义则是编码器功能实现的关键。
在这篇文章中,我们将从简单到复杂,由浅入深地探讨信捷编码器伺服插头50针引脚定义,以便读者能够更深入地理解这一主题。
2. 信捷编码器伺服插头50针引脚定义的基本概念在了解信捷编码器伺服插头50针引脚定义之前,我们首先需要了解编码器的基本功能和结构。
编码器作为一种测量旋转运动的装置,通常由光栅器和信号处理器两部分组成。
在信捷编码器中,50针插头引脚定义则是用来连接编码器与伺服系统之间的重要接口,包括信号输入、输出、电源和地线等。
3. 50针插头引脚定义的具体功能信捷编码器伺服插头50针引脚定义中,不同的引脚代表着不同的功能。
这些功能包括但不限于正交信号输入、编码器供电、报警信号输出等。
在开发和应用中,了解每个引脚的定义和功能对于正确连接和使用编码器至关重要。
4. 我对信捷编码器伺服插头50针引脚定义的个人观点和理解在我看来,深入理解信捷编码器伺服插头50针引脚定义,可以帮助我们更好地应用编码器,提高伺服系统的性能和稳定性。
了解50针插头引脚的定义和功能,可以让工程师更加方便地进行系统的设计和调试工作。
通过不断地学习和实践,可以更好地理解并掌握编码器在伺服系统中的应用。
5. 总结与回顾通过本文的阐述,我们深入探讨了信捷编码器伺服插头50针引脚定义这一主题。
从基本概念到具体功能,我们逐步展开了对这一主题的全面评估。
希望通过本文的阐述,读者能够对信捷编码器伺服插头50针引脚定义有更加全面、深刻的理解,并在实际应用中取得更好的效果。
在这篇文章中,我们着重探讨了信捷编码器伺服插头50针引脚定义的重要性和功能。
mcu50技术说明

分布式运动控制器MCU50(Motion Control Unit)技术说明一、简介基于CAN总线通讯方式的分布式运动控制器,通过对伺服驱动器的调节,来达到对AGV车体运动的精确控制,理论上最多可以挂接128个CAN节点设备。
由于每辆AGV车载设备的数量有限,实际应用时往往不超过4个。
每个运动控制器,不仅能够控制2个轴的伺服驱动器,还具有16个IO输入口、8个IO输出口、4个AD输入口和2个DA输出口。
而且,在升级版本中,还预留有16位的总线IO读写功能和串口编程功能。
二、技术指标2.1 电源运动控制器内部的两个DC/DC电源模块DC1、DC2(如图2.1.2),可以将18-36V的直流输入电压转换为12V、5V两路直流输出电压。
如果去掉DC/DC电源模块,也可以使用外部的直流电源通过#1、#2电源管脚给运动控制器供电。
表2.1.1图2.1.22.2 通讯运动控制器的CAN总线通讯部分与其它部分的电源是隔离的,这样就保证总线上产生的干扰不会影响运动控制器内部的其它电路。
使用时需要在CAN总线的首端和末端分别跨接1个120欧姆的匹配电阻(如图2.2.2),以减少线路上传输信号的反射。
表2.2.1图2.2.22.3 伺服驱动器控制运动控制器的2对PWM脉宽调制管脚用来调节伺服驱动器的输出。
每对PWM管脚通过改变输出脉冲信号的占空比来控制伺服驱动器输出电压的方向和大小。
运动控制器的伺服输出禁止管脚可以禁止或使能伺服驱动器的输出(如图2.3.2)。
伺服驱动器的报警信号可以接入运动控制器的报警IO输入口。
伺服驱动器的正反向禁止信号可以接入运动控制器的普通IO输入口。
表2.3.1图2.3.22.4 编码器信号输入运动控制器根据编码器信号的反馈输入,来进一步调节伺服驱动器的输出。
每个运动控制器可以处理2路差分增量式编码器的输入信号,编码器由5V直流供电。
表2.42.5 模拟信号输入运动控制器不仅能将4路0-12V的模拟信号转换为10位数字信号,而且提供了精确的2.50V电压基准。
青岛芯笙微纳电子科技有限公司Gas Mass Flow Meter 50系列产品规格书说明书

产品Product Specification动态范围大 MEMS流量传感器芯片工作原理产品规格Specifications* 所示量程为氮气可选量程。
%F.S 指误差占满量程的百分比。
响应时间指达到当前流量±2%以内所需要的时间。
工作压力指进气口与出气口(1bar 绝压)之间的差压,更多细节请联系我们。
* * 25℃、2.5bar 差压(进气口3.5bar 绝压对出气口1bar 绝压)、水平放置安装。
建议在入口端安装尺寸合适的直管段,否则可能会引起精度产生偏差。
建议在入口端和出口端匹配尽可能大的接头,以避免导致额外的压损。
产品尺寸 Dimensions通信连接Communication7芯航空插头设备端针脚序号线序定义1234567GNDRS485-A模拟电流输出RS485-B电源请勿连接请勿连接7芯航空插头设备端针脚序号说明:产品量程不同,尺寸可能略有区别。
产品选型Selection Guide专业服务Serives货期短,良好的售前售后服务;根据现场使用环境,调整产品配置;经济性,降低客户采购成本和维护成本;优越的产品稳定性,提高使用寿命,降低维护成本;专业的研发团队和技术支持,为用户提供强大的技术支持和保障。
基于MEMS热传导原理实现对气体的精确测量,不受温度和压力等环境参数的影响。
在标定和校准环节,拥有活塞标准流量装置(精度0.3%)、音速喷嘴标准流量装置(精度0.13%)、美国福禄克Molbox流量设备(精度0.125%)等多台高端设备,确保产品精度。
安全及保修Safety And Warranty产品用于有害气体或爆炸性气体时,须严格按照产品使用说明或咨询公司技术人员。
有关产品应用的最新信息,请与厂家联系索取或访问公司网站。
强腐蚀性或氟化物气体可能影响产品正常工作,甚至对产品造成毁损。
产品经过密封处理并在装箱前进行过防漏试验,在高压下使用必须按照产品使用说明的限制,否则会导致泄漏及安全问题。
4050芯片

4050芯片4050芯片,也称为HEF4050,是一种兼容于CMOS(互补金属氧化物半导体)逻辑家族的集成电路芯片。
它包含了六个非反向缓冲器,可用于提供高输入阻抗的信号放大功能。
以下将对4050芯片的结构、工作原理以及应用领域进行详细介绍。
1. 结构:4050芯片采用了DIP(双引线直插)封装,引脚数为16。
其中,引脚1至3分别对应于非反向输入端(A1至A6),引脚13至15分别对应于输出端(Y1至Y6),引脚7是非反向输出端。
引脚4、5、6、8、9、10、11、12分别对应于电源和地。
2. 工作原理:4050芯片主要通过非反向缓冲器实现信号放大和阻隔功能。
每个非反向缓冲器都由一个CMOS传输门和一个输出驱动器组成。
当输入信号V_in为低电平时,传输门关闭且输出为高电平;当输入信号为高电平时,传输门打开且输出为低电平。
4050芯片内部的输出驱动器会将输入信号经过非反向放大并输出。
3. 应用领域:由于4050芯片具有低功耗、高输入阻抗和大的输出驱动能力等特点,所以在很多领域都有广泛的应用。
以下列举几个主要的应用领域:3.1 信号放大与逻辑转换:4050芯片可用于放大输入信号的幅度,并将其转换为逻辑电平,从而提供给后续的逻辑门电路进行处理。
例如,它可以将低电平的微弱信号放大到驱动其他CMOS逻辑门所需的电平。
3.2 电压级转换:由于4050芯片具有较高的输入阻抗,因此可以用于不同电平之间的逻辑电平转换。
例如,将5V逻辑电平的信号转换为3.3V逻辑电平,以满足特定电平要求的外部设备。
3.3 波形整形:4050芯片可以将输入的脉冲信号进行整形,使其满足要求的波形特性。
这对于输入信号采样和传输的精确性尤为重要。
3.4 传感器信号处理:由于4050芯片具有高输入阻抗和低功耗的特点,可以用于对传感器信号进行处理和放大。
例如,对于光电传感器或温度传感器等信号,4050芯片可以提供合适的放大和转换功能。
总结:4050芯片作为一种CMOS逻辑家族的集成电路芯片,在信号放大、逻辑转换、电压级转换、波形整形以及传感器信号处理等领域有着广泛的应用。
MCU引脚输出模式中推挽输出与开漏输出电路原理区别

MCU 引脚输出模式中推挽输出与开漏输出电路原理
区别
开漏输出:输出端相当于三极管的集电极. 要得到高电平状态需要上拉电阻才行. 适合于做电流型的驱动,其吸收电流的能力相对强(一般20ma 以内).
推挽结构一般是指两个三极管分别受两互补信号的控制,总是在一个三极管导通的时候另一个截止.
我们先来说说集电极开路输出的结构。
集电极开路输出的结构如图1 所示,右边的那个三极管集电极什幺都不接,所以叫做集电极开路(左边的三极管为反相之用,使输入为0 时,输出也为0)。
对于图1,当左端的输入为0 时,前面的三极管截止(即集电极C 跟发射极E 之间相当于断开),所以5V
电源通过1K 电阻加到右边的三极管上,右边的三极管导通(即相当于一个开关闭合);当左端的输入为1 时,前面的三极管导通,而后面的三极管截止(相当于开关断开)。
我们将图1 简化成图2 的样子。
图2 中的开关受软件控制,1 时断开,0 时
闭合。
很明显可以看出,当开关闭合时,输出直接接地,所以输出电平为0。
而当开关断开时,则输出端悬空了,即高阻态。
这时电平状态未知,如果后面一个电阻负载(即使很轻的负载)到地,那幺输出端的电平就被这个负载。
FM33LG0 低功耗 MCU 芯片产品说明书

FM33LG0低功耗MCU芯片产品说明书2022.03本资料是为了让用户根据用途选择合适的上海复旦微电子集团股份有限公司(以下简称复旦微电子)的产品而提供的参考资料,不转让属于复旦微电子或者第三者所有的知识产权以及其他权利的许可。
在使用本资料所记载的信息最终做出有关信息和产品是否适用的判断前,请您务必将所有信息作为一个整体系统来进行评价。
采购方对于选择与使用本文描述的复旦微电子的产品和服务全权负责,复旦微电子不承担采购方选择与使用本文描述的产品和服务的责任。
除非以书面形式明确地认可,复旦微电子的产品不推荐、不授权、不担保用于包括军事、航空、航天、救生及生命维持系统在内的,由于失效或故障可能导致人身伤亡、严重的财产或环境损失的产品或系统中。
未经复旦微电子的许可,不得翻印或者复制全部或部分本资料的内容。
今后日常的产品更新会在适当的时候发布,恕不另行通知。
在购买本资料所记载的产品时,请预先向复旦微电子在当地的销售办事处确认最新信息,并请您通过各种方式关注复旦微电子公布的信息,包括复旦微电子的网站(/)。
如果您需要了解有关本资料所记载的信息或产品的详情,请与上海复旦微电子集团股份有限公司在当地的销售办事处联系。
商标上海复旦微电子集团股份有限公司的公司名称、徽标以及“复旦”徽标均为上海复旦微电子集团股份有限公司及其分公司在中国的商标或注册商标。
上海复旦微电子集团股份有限公司在中国发布,版权所有。
章节列表章节列表 (3)表目录 (23)图目录 (26)1产品综述 (33)1.1概述 (33)1.2芯片结构框图 (36)1.3产品型号列表 (37)1.4产品特性对照表 (38)2引脚和封装 (39)2.1封装和引脚排列 (39)2.1.1LQFP80封装图(FM33LG0x8) (39)2.1.2LQFP64封装图(FM33LG0x6) (40)2.1.3LQFP48封装图(FM33LG0x5) (41)2.1.4QFN32封装图(FM33LG0x3) (42)2.1.5引脚功能定义(FM33LG0xx) (43)2.1.6封装尺寸图 (50)2.2焊接安装说明 (56)2.3MSL等级 (57)2.4热阻特性 (58)3电参数 (59)3.1参数说明 (59)3.2参数测试条件 (59)3.2.1供电方案 (59)3.3极限参数 (61)3.4性能参数 (62)3.4.1典型工作条件 (62)3.4.2功耗参数 (62)3.4.3复位和电源监控 (64)3.4.4高精度基准源 (65)3.4.5低功耗模式唤醒时间 (67)3.4.6外部时钟源特性 (68)3.4.7内部时钟源特性 (70)3.4.8PLL特性 (71)3.4.9ADC特性 (72)3.4.10DAC特性 (78)3.4.11温度传感器 (81)3.4.12运算放大器特性 (83)3.4.13模拟比较器特性 (85)3.4.14Flash存储器特性 (86)3.4.15GPIO特性 (87)3.4.16LCD特性 (89)3.4.17VBAT测量特性 (90)4总线与存储 (91)4.1系统总线 (91)4.2存储空间分配 (92)4.2.1概述 (92)4.2.2外设模块寄存器地址分配 (95)4.3RAM (97)4.3.1概述 (97)4.4F LASH (98)4.4.1概述 (98)4.4.2特殊信息扇区说明 (98)4.4.3指令Prefetch (103)4.4.4Flash编程 (103)4.4.5Data Flash (108)4.4.6Flash的内容保护 (109)4.5寄存器 (112)4.5.1Flash读取控制寄存器(FLS_RDCR) (112)4.5.2预取指控制寄存器(FLS_PFCR) (113)4.5.3用户配置字寄存器(FLS_OPTBR) (113)4.5.4ACLOCK寄存器1(FLS_ACLOCK1) (114)4.5.5ACLOCK寄存器2(FLS_ACLOCK2) (115)4.5.6Flash擦写控制寄存器(FLS_EPCR) (115)4.5.7Flash Key输入寄存器(FLS_KEY) (116)4.5.8Flash中断使能寄存器(FLS_IER) (116)4.5.9Flash标志寄存器(FLS_ISR) (117)5电源管理单元(PMU) (119)5.1芯片工作电源 (119)5.1.1电源域划分 (119)5.1.2电源结构图 (120)5.1.3ADC和基准电压的独立供电 (120)5.1.4片内快速基准源(AVREF) (121)5.1.5片内高精度基准源(VREF1p2) (121)5.1.6VREFP产生(VREFP_VREG) (121)5.2功耗模式 (122)5.2.1概述 (122)5.2.2功耗模式与系统频率 (123)5.2.3Active模式 (124)5.2.4LP Active模式 (124)5.2.5LP Run模式 (125)5.2.6SLEEP模式 (125)5.2.7DEEPSLEEP模式 (126)5.2.8VBAT模式 (127)5.3唤醒源 (128)5.3.1VREF1p2延迟唤醒功能 (129)5.4休眠唤醒后的时钟控制 (130)5.5寄存器 (131)5.5.1低功耗控制寄存器(PMU_CR) (131)5.5.2唤醒时间控制寄存器(PMU_WKTR) (132)5.5.3唤醒源标志查询寄存器(PMU_WKFR) (133)5.5.4PMU中断使能寄存器(PMU_IER) (134)5.5.5PMU中断标志寄存器(PMU_ISR) (135)5.5.6ULPBG调校寄存器(PMU_ULPB_TR) (135)5.5.7VREFP控制寄存器(PMU_VREFP_CR) (136)5.5.8VREFP配置寄存器(PMU_VREFP_CFGR) (136)5.5.9VREFP状态标志寄存器(PMU_VREFP_ISR) (137)5.5.10VREFP调校寄存器(PMU_VREFP_TR) (138)6.1概述 (139)6.2基准电压的应用 (139)6.3温度传感器 (139)6.4输出缓冲器 (140)6.5芯片休眠 (140)6.6寄存器 (141)6.6.1VREF1p2控制寄存器(VREF_CR) (141)6.6.2VREF1p2配置寄存器(VREF_CFGR) (141)6.6.3VREF1p2标志寄存器(VREF_ISR) (142)6.6.4VREF1p2中断使能寄存器(VREF_IER) (143)6.6.5模拟BUFFER控制寄存器(VREF_BUFCR) (143)7VREFP基准电压(VREFP_VREG) (145)7.1概述 (145)7.2功能描述 (145)7.2.1概述 (145)7.2.2时钟和复位 (150)7.2.3参考电压 (150)7.2.4输出电压 (150)7.2.5工作模式 (151)7.2.6中断和标志 (152)7.3寄存器 (153)8备份电源域(VAO DOMAIN) (154)8.1概述 (154)8.2结构框图 (155)8.3电源切换 (155)8.4复位 (155)8.5低频晶体振荡电路(XTLF) (156)8.5.1概述 (156)8.5.2工作方式 (156)8.5.3停振检测 (156)8.6实时时钟(RTCB) (157)8.7IO (157)8.7.1使用PH15输入实现tamper检测 (157)8.8寄存器 (159)8.8.1VAO复位控制寄存器(VAO_RSTCR) (159)8.8.2XTLF控制寄存器(VAO_XTLFCR) (160)8.8.3XTLF振荡强度寄存器(VAO_XTLFPR) (160)8.8.4停振检测中断使能寄存器(VAO_FDIER) (161)8.8.5停振检测中断标志寄存器(VAO_FDISR) (162)8.8.6VAO IO输入使能寄存器(VAO_INEN) (162)8.8.7VAO IO上拉使能寄存器(VAO_PUEN) (163)8.8.8VAO IO开漏使能寄存器(VAO_ODEN) (163)8.8.9VAO IO功能选择寄存器(VAO_FCR) (164)8.8.10VAO IO输出数据寄存器(VAO_DOR) (164)8.8.11VAO IO输入数据寄存器(VAO_DIR) (165)8.8.12VAO IO输入低阈值配置寄存器(VAO_VILR) (165)9跨电源域接口(CDIF) (167)9.1概述 (167)9.2总线地址 (167)9.4寄存器(CPU DOMAIN) (168)9.4.1接口控制寄存器(CDIF_CR) (168)9.4.2接口预分频寄存器(CDIF_PRSC) (168)10处理器(CPU) (170)10.1概述 (170)10.1.1处理器配置 (170)10.2内核寄存器 (171)10.3异常和中断 (172)10.3.1中断向量表 (172)10.3.2中断优先级 (173)10.3.3错误处理 (173)10.3.4锁定(Lockup) (174)10.4MPU (174)10.4.1MPU寄存器 (175)10.5调试特性 (179)10.5.1调试功能引脚 (179)10.5.2调试状态下的看门狗控制 (179)10.5.3DEBUG的复位 (179)11复位管理单元(RMU) (180)11.1概述 (180)11.2模块框图 (181)11.3VDD上下电复位 (182)11.4软件复位 (183)11.5NRST引脚复位 (183)11.6寄存器 (184)11.6.1PDR配置寄存器(RMU_PDRCR) (184)11.6.2BOR配置寄存器(RMU_BORCR) (185)11.6.3复位配置寄存器(RMU_LKPCR) (185)11.6.4软件复位寄存器(RMU_SOFTRST) (186)11.6.5复位标志寄存器(RMU_RSTFR) (186)11.6.6外设复位使能寄存器(RMU_PRSTEN) (187)11.6.7AHB外设复位寄存器(RMU_AHBRSTCR) (187)11.6.8APB1外设复位寄存器(RMU_APBRSTCR1) (188)11.6.9APB2外设复位寄存器(RMU_APBRSTCR2) (190)12独立看门狗(IWDT) (192)12.1概述 (192)12.2结构框图 (192)12.3IWDT功能描述 (192)12.4IWDT窗口功能 (193)12.5IWDT冻结 (194)12.6寄存器 (195)12.6.1IWDT清除寄存器(IWDT_SERV) (195)12.6.2IWDT配置寄存器(IWDT_CR) (195)12.6.3IWDT计数值寄存器(IWDT_CNT) (196)12.6.4IWDT窗口寄存器(IWDT_WIN) (197)12.6.5IWDT中断使能寄存器(IWDT_IER) (197)12.6.6IWDT中断标志寄存器(IWDT_ISR) (197)13窗口看门狗(WWDT) (199)13.1功能描述 (199)13.3WWDT工作方式 (200)13.4寄存器 (202)13.4.1WWDT控制寄存器(WWDT_CR) (202)13.4.2WWDT配置寄存器(WWDT_CFGR) (202)13.4.3WWDT计数寄存器(WWDT_CNT) (203)13.4.4WWDT中断使能寄存器(WWDT_IER) (203)13.4.5WWDT中断标志寄存器(WWDT_ISR) (204)13.4.6WWDT预分频寄存器(WWDT_PSC) (204)14时钟管理单元(CMU) (206)14.1概述 (206)14.2时钟架构 (207)14.2.1时钟树 (207)14.2.2SYSCLK切换说明 (208)14.2.3时钟安全性 (208)14.2.4主要时钟说明 (208)14.2.5外设模块的总线时钟和工作时钟 (209)14.2.6休眠模式下的外设时钟 (210)14.2.7LSCLK切换逻辑 (211)14.3高频RC振荡器(RCHF) (212)14.3.1概述 (212)14.3.2软件使用指南 (212)14.4低频RC振荡器(RCLF) (213)14.4.1概述 (213)14.5低功耗RC振荡器(RCLP) (214)14.5.1概述 (214)14.5.2软件使用指南 (214)14.6高频晶体振荡电路(XTHF) (215)14.6.1概述 (215)14.6.2工作方式 (215)14.6.3停振检测(HFDET) (215)14.7锁相环(PLL) (216)14.7.1概述 (216)14.7.2软件应用指南 (216)14.8时钟校准 (217)14.9低功耗模式下的时钟源 (218)14.10休眠唤醒的时钟处理 (218)14.11寄存器 (219)14.11.1系统时钟配置寄存器(CMU_SYSCLKCR) (220)14.11.2RCHF时钟控制寄存器(CMU_RCHCR) (221)14.11.3RCHF调校寄存器(CMU_RCHFTR) (222)14.11.4PLL控制寄存器(CMU_PLLCR) (222)14.11.5RCLP控制寄存器(CMU_RCLPCR) (223)14.11.6RCLP调校寄存器(CMU_RCLPTR) (224)14.11.7LSCLK选择寄存器(CMU_LSCLKSEL) (224)14.11.8XTHF控制寄存器(CMU_XTHFCR) (225)14.11.9RCLF控制寄存器(CMU_RCLFCR) (225)14.11.10RCLF调校寄存器(CMU_RCLFTR) (226)14.11.11CMU中断使能寄存器(CMU_IER) (226)14.11.12CMU中断标志寄存器(CMU_ISR) (227)14.11.13外设总线时钟控制寄存器1(CMU_PCLKCR1) (228)14.11.14外设总线时钟控制寄存器2(CMU_PCLKCR2) (228)14.11.15外设总线时钟控制寄存器3(CMU_PCLKCR3) (229)14.11.16外设总线时钟控制寄存器4(CMU_PCLKCR4) (230)14.11.17外设工作时钟配置寄存器1(CMU_OPCCR1) (231)14.11.18外设工作时钟配置寄存器2(CMU_OPCCR2) (232)14.11.19外设工作时钟配置寄存器3(CMU_OPCCR3) (233)14.11.20AHB Master控制寄存器(CMU_AHBMCR) (234)14.11.21时钟校准控制寄存器(CMU_CCCR) (235)14.11.22时钟校准配置寄存器(CMU_CCFR) (235)14.11.23时钟校准计数值寄存器(CMU_CCNR) (236)14.11.24时钟校准中断标志寄存器(CMU_CCISR) (237)15电源电压监测(SVD) (238)15.1概述 (238)15.2结构框图 (238)15.3引脚定义 (239)15.4功能描述 (239)15.5间歇使能模式 (241)15.6外部电源检测 (241)15.7电源检测阈值 (242)15.8寄存器 (246)15.8.1SVD配置寄存器(SVD_CFGR) (246)15.8.2SVD控制寄存器(SVD_CR) (247)15.8.3SVD中断使能寄存器(SVD_IER) (247)15.8.4SVD状态和标志寄存器(SVD_ISR) (248)15.8.5SVD参考电压选择寄存器(SVD_VSR) (248)16AES硬件运算单元(AES) (250)16.1功能描述 (250)16.2工作模式 (250)16.3AES数据流处理模式 (251)16.3.1ECB模式 (251)16.3.2CBC模式 (252)16.3.3暂停模式 (254)16.3.4CTR模式 (255)16.3.5CTR模式下的暂停模式 (256)16.3.6GCM模式 (256)16.3.7MultH模块 (259)16.3.8推荐的GCM流程 (260)16.4数据类型 (261)16.5工作流程 (262)16.5.1模式1:加密 (262)16.5.2模式2:密钥扩展 (263)16.5.3模式3:解密 (264)16.5.4模式4:密钥扩展+解密 (264)16.5.5使用MultH模块 (265)16.6DMA接口 (266)16.6.1MultH模块与DMA间接口 (267)16.7错误标志 (267)16.8寄存器 (268)16.8.1AES控制寄存器(AES_CR) (268)16.8.2AES中断使能寄存器(AES_IER) (270)16.8.3AES中断标志寄存器(AES_ISR) (271)16.8.4AES数据输入寄存器(AES_DIR) (271)16.8.6AES秘钥寄存器(AES_KEYx) (272)16.8.7AES初始向量寄存器(AES_IVRx) (273)16.8.8AES MultH参数寄存器(AES_Hx) (273)17随机数发生器(TRNG) (274)17.1概述 (274)17.2功能描述 (275)17.2.1随机数产生 (275)17.2.2工作时钟 (275)17.2.3随机数读取 (276)17.2.4CRC运算 (276)17.3寄存器 (277)17.3.1随机数控制寄存器(RNG_CR) (277)17.3.2随机数/CRC结果输出寄存器(RNG_DOR) (277)17.3.3RNG标志寄存器(RNG_SR) (278)17.3.4CRC控制寄存器(RNG_CRCCR) (278)17.3.5CRC输入数据寄存器(RNG_CRCDIR) (279)17.3.6CRC标志寄存器(RNG_CRCSR) (279)18运算放大器(OPA1) (281)18.1概述 (281)18.2结构框图 (282)18.3引脚定义 (283)18.4功能描述 (283)18.4.1时钟和复位 (283)18.4.2Standalone模式(non-inverting amplifier) (284)18.4.3Standalone模式(inverting amplifier) (285)18.4.4Buffer模式 (285)18.4.5同相PGA模式 (286)18.4.6反相PGA模式 (288)18.4.7Offset校准 (290)18.4.8低功耗模式 (291)18.4.9休眠模式下的OPA (292)18.5寄存器 (293)18.5.1OPA1控制寄存器(OPA1_CR) (293)18.5.2OPA1校准寄存器(OPA1_CALR) (294)18.5.3OPA1校准输出寄存器(OPA1_COR) (295)19模拟比较器(COMPARATOR) (297)19.1概述 (297)19.2结构框图 (298)19.3功能描述 (299)19.3.1基本功能 (299)19.3.2内部比较基准选择和产生 (299)19.3.3时钟和复位 (300)19.3.4引脚和内部信号连接 (300)19.3.5窗口功能 (301)19.3.6功耗和速度模式 (302)19.3.1比较器中断 (303)19.3.2比较器输出和触发输出 (303)19.3.3输出数字滤波 (305)19.4寄存器 (306)控制寄存器()19.4.3COMP3控制寄存器(COMP3_CR) (309)19.4.4COMP中断配置寄存器(COMP_ICR) (310)19.4.5COMP中断标志寄存器(COMP_IF) (311)19.4.6COMP缓冲器控制寄存器(COMP_BUFCR) (311)20除法/开方运算加速器(DIVAS) (313)20.1概述 (313)20.2时钟和复位 (313)20.3硬件除法工作流程 (313)20.4硬件开方工作流程 (314)20.5寄存器 (315)20.5.1操作数寄存器 (315)20.5.2除数寄存器 (315)20.5.3商寄存器 (316)20.5.4余数寄存器 (316)20.5.5根寄存器 (317)20.5.6状态标志寄存器 (317)20.5.7控制寄存器 (318)21双线串行总线(I2C) (319)21.1概述 (319)21.2结构框图 (319)21.3引脚定义和上拉电阻范围 (320)21.4时钟和复位 (324)21.5接口时序 (325)21.5.1接口时序图 (325)21.5.2接口时序描述 (326)21.6I2C工作模式 (328)21.7I2C从机地址格式 (329)21.8I2C初始化 (330)21.8.1IO配置 (330)21.8.2主机波特率配置 (330)21.8.3从机的输入模拟滤波和输出延迟 (331)21.9I2C主机功能 (332)21.9.17bit寻址 (332)21.9.210bit寻址 (337)21.9.3DMA (340)21.9.4SCL延展(Slave Clock Stretching) (344)21.9.5超时机制 (344)21.9.6可编程时序 (344)21.10I2C从机功能 (346)21.10.1从机寻址 (346)21.10.2从机发送数据 (346)21.10.3从机接收数据 (347)21.10.4从机低功耗接收唤醒 (349)21.10.5DMA (349)21.10.6从机时序 (353)21.11寄存器 (354)21.11.1I2C主机配置寄存器(I2C_MSPCFGR) (354)21.11.2I2C主机控制寄存器(I2C_MSPCR) (355)21.11.3I2C主机中断使能寄存器(I2C_MSPIER) (356)21.11.4I2C主机中断标志寄存器(I2C_MSPISR) (357)21.11.5I2C主机状态寄存器(I2C_MSPSR) (357)21.11.6I2C主机波特率设置寄存器(I2C_MSPBGR) (358)21.11.7I2C主机收发缓冲寄存器(I2C_MSPBUF) (359)21.11.8I2C主机时序控制寄存器(I2C_MSPTCR) (359)21.11.9I2C主机超时寄存器(I2C_MSPTOR) (360)21.11.10I2C从机控制寄存器(I2C_SSPCR) (360)21.11.11I2C从机中断使能寄存器(I2C_SSPIER) (361)21.11.12I2C从机中断标志寄存器(I2C_SSPISR) (362)21.11.13I2C从机状态寄存器(I2C_SSPSR) (363)21.11.14I2C从机收发缓冲寄存器(I2C_SSPBUF) (364)21.11.15I2C从机地址寄存器(I2C_SSPADR) (364)22通用异步收发传输器(UART) (366)22.1概述 (366)22.2结构框图 (367)22.3引脚定义 (368)22.4UART类型区分 (369)22.5UART字符描述 (369)22.6功能描述 (371)22.6.1时钟和复位 (371)22.6.2位接收采样 (371)22.6.3数据发送 (372)22.6.4数据接收 (374)22.6.5低功耗休眠唤醒(UART0/1) (375)22.6.6使用DMA进行UART收发 (375)22.6.7DMA模式下的发送完成中断 (376)22.7波特率发生 (376)22.7.1波特率发生 (376)22.7.1波特率自适应 (377)22.8红外调制 (378)22.9接收超时 (379)22.10发送延迟 (379)22.11寄存器 (380)22.11.1红外调制寄存器(UART_IRCR) (381)22.11.2UARTx控制状态寄存器(UARTx_CSR) (382)22.11.3UARTx中断使能寄存器(UARTx_IER) (383)22.11.4UARTx中断标志寄存器(UARTx_ISR) (384)22.11.5UARTx超时和延迟寄存器(UARTx_TODR) (385)22.11.6UARTx接收缓冲寄存器(UARTx_RXBUF) (385)22.11.7UARTx发送缓冲寄存器(UARTx_TXBUF) (386)22.11.8UATRx波特率产生寄存器(UARTx_BGR) (386)23低功耗UART(LPUART) (388)23.1概述 (388)23.2结构框图 (389)23.3引脚定义 (390)23.4时钟和复位 (390)23.5字符描述 (391)23.6功能描述 (393)23.6.1位接收采样和发送 (393)23.6.2接收流程 (394)23.6.3发送流程 (394)23.6.4使用DMA进行LPUART收发 (394)23.6.5休眠模式下的数据接收唤醒 (395)23.6.6LPRUN模式下的数据DMA收发 (395)23.6.7DMA模式下的发送完成中断 (395)23.7寄存器 (397)23.7.1LPUARTx控制状态寄存器(LPUARTx_CSR) (398)23.7.2LPUARTx中断使能寄存器(LPUARTx _IER) (399)23.7.3LPUARTx中断标志寄存器(LPUARTx _ISR) (400)23.7.4LPUARTx波特率调制寄存器(LPUARTx _BMR) (400)23.7.5LPUARTx接收数据寄存器(LPUARTx _RXBUF) (401)23.7.6LPUARTx发送数据寄存器(LPUARTx _TXBUF) (402)23.7.7LPUARTx数据匹配寄存器(LPUARTx _DMR) (402)24串行外设接口(SPI) (404)24.1概述 (404)24.2结构框图 (404)24.3引脚定义 (406)24.4时钟和复位 (406)24.5接口时序 (406)24.5.1CPHA=0 (406)24.5.2CPHA=1 (407)24.5.14线半双工模式(主机) (407)24.6功能描述 (409)24.6.1I/O配置 (409)24.6.2全双工数据通信 (410)24.6.3TX-ONLY模式 (411)24.6.4RX-ONLY模式 (412)24.6.5主机SSN控制 (412)24.6.6数据冲突 (413)24.6.7使用DMA进行SPI收发 (413)24.7寄存器 (415)24.7.1SPI控制寄存器1(SPIx_CR1) (416)24.7.2SPI控制寄存器2(SPIx_CR2) (417)24.7.3SPI控制寄存器3(SPIx_CR3) (418)24.7.4SPI中断控制寄存器(SPIx_IER) (419)24.7.5SPI中断标志寄存器(SPIx_ISR) (419)24.7.6SPI发送缓存寄存器(SPIx_TXBUF) (420)24.7.7SPI发送缓存寄存器(SPIx_RXBUF) (420)25智能卡接口(ISO7816) (422)25.1概述 (422)25.2结构框图 (422)25.3时钟和复位 (423)25.4接口时序 (423)25.5功能描述 (424)25.5.1数据接收 (424)25.5.2数据发送 (424)25.5.3使用DMA进行7816收发 (426)25.6寄存器 (427)25.6.1U7816控制寄存器(U7816_CR) (427)25.6.2U7816帧格式控制寄存器(U7816_FFR) (428)25.6.3U7816额外保护时间寄存器(U7816_EGTR) (429)25.6.4U7816工作时钟分频寄存器(U7816_PSC) (429)25.6.5U7816波特率寄存器(U7816_BGR) (430)25.6.6U7816数据接收缓冲寄存器(U7816_RXBUF) (430)25.6.7U7816数据发送缓冲寄存器(U7816_TXBUF) (431)25.6.8U7816中断使能寄存器(U7816_IER) (431)25.6.9U7816状态标志寄存器(U7816_ISR) (432)26控制器区域网络(CAN) (434)26.1概述 (434)26.2结构框图 (434)26.3引脚定义 (435)26.4功能描述 (435)26.4.1时钟和复位 (435)26.4.2Bit timing (435)26.4.3Bit stream processor (436)26.4.4控制器工作模式 (436)26.4.5消息帧存储和消息帧结构(Message storage and structure) (437)26.4.6消息滤波器(Acceptance Filter) (439)26.4.7错误管理 (439)26.5编程模型 (443)26.5.1寄存器配置 (443)26.5.2消息传输 (443)26.6寄存器 (445)26.6.1CAN控制寄存器(CAN_CR) (446)26.6.2CAN模式选择寄存器(CAN_MSR) (447)26.6.3CAN波特率预分频寄存器(CAN_BRPR) (447)26.6.4CAN位时序寄存器(CAN_BTR) (448)26.6.5CAN错误计数寄存器(CAN_ECR) (448)26.6.6CAN错误状态寄存器(CAN_ESR) (449)26.6.7CAN状态标志寄存器(CAN_SR) (450)26.6.8CAN中断标志寄存器(CAN_ISR) (451)26.6.9CAN中断使能寄存器(CAN_IER) (452)26.6.10CAN中断清除寄存器(CAN_ICR) (453)26.6.11CAN发送FIFO ID寄存器(CAN_TXFIDR) (453)26.6.12CAN发送FIFO DLC寄存器(CAN_TXFDLCR) (454)26.6.13CAN发送FIFO DataWord1寄存器(CAN_TXFDW1R) (454)26.6.14CAN发送FIFO DataWord2寄存器(CAN_TXFDW2R) (455)26.6.15CAN高优先级发送缓冲ID寄存器(CAN_HPBIDR) (455)26.6.16CAN高优先级发送缓冲DLC寄存器(CAN_HPBDLCR) (456)26.6.17CAN高优先级发送缓冲DataWord1寄存器(CAN_HPBDW1R) (456)26.6.18CAN高优先级发送缓冲DataWord2寄存器(CAN_HPBDW2R) (457)26.6.19CAN接收FIFO ID寄存器(CAN_RXF_IDR) (457)26.6.20CAN接收FIFO DLC寄存器(CAN_RXFDLCR) (458)26.6.21CAN接收FIFO DataWord1寄存器(CAN_RXFDW1R) (458)26.6.22CAN接收FIFO DataWord2寄存器(CAN_RXFDW2R) (459)26.6.23CAN接收滤波寄存器(CAN_AFR) (459)26.6.24CAN接收滤波掩码寄存器x(CAN_AFMRx) (460)26.6.25CAN接收滤波ID寄存器x(CAN_AFIRx) (461)27直接存储访问控制器(DMA) (462)27.1概述 (462)27.2工作原理 (463)27.3结构框图 (464)27.4工作流程 (464)27.5访问带宽 (466)27.6通道控制 (467)27.6.1DMA请求映射 (467)27.6.2通道优先级 (468)27.6.3传输方向定义 (468)27.6.4循环模式 (468)27.7寄存器 (469)27.7.1DMA全局控制寄存器(DMA_GCR) (469)27.7.2通道x控制寄存器(DMA_CHxCR) (470)27.7.3通道x存储器指针寄存器(DMA_CHxMAD) (471)27.7.4通道7控制寄存器(DMA_CH7CR) (472)27.7.5通道7 Flash指针寄存器(DMA_CH7FLSAD) (473)27.7.6通道7 RAM指针寄存器(DMA_CH7RAMAD) (473)27.7.7DMA状态标志寄存器(DMA_ISR) (474)28循环冗余校验(CRC) (475)28.1概述 (475)28.2软件配置过程 (476)28.3G OLDEN 数据 (477)28.4DMA接口 (477)28.5F LASH数据完整性校验 (478)28.6寄存器 (479)28.6.1CRC数据寄存器(CRC_DR) (479)28.6.2CRC控制状态寄存器(CRC_CR) (479)28.6.3CRC LFSR寄存器(CRC_LFSR) (481)28.6.4CRC输出异或寄存器(CRC_XOR) (481)28.6.5CRC多项式寄存器(CRC_POLY) (481)29高级定时器(ATIM) (483)29.1概述 (483)29.2主要特性 (483)29.3结构框图 (484)29.4功能描述 (485)29.4.1定时单元 (485)29.4.2定时器工作模式 (487)29.4.3重复计数器 (494)29.4.4Preload寄存器 (495)29.4.5计数器工作时钟 (496)29.4.6内部触发信号(ITRx) (501)29.4.7捕捉/比较通道 (502)29.4.8输入捕捉模式 (504)29.4.9软件Force输出 (506)29.4.10输出比较模式 (507)29.4.11PWM输出 (508)29.4.12互补输出和死区插入 (510)29.4.13刹车功能 (511)29.4.14互补输出通道信号状态逻辑表 (513)29.4.156-step PWM输出 (514)29.4.16单脉冲输出 (515)29.4.17外部事件清除OCxREF (517)29.4.18编码器接口模式(encoder interface) (518)29.4.19TIM从机模式 (520)29.4.20DMA访问 (523)29.4.21DMA Burst (524)29.4.22输入异或功能 (525)29.4.23霍尔传感器接口 (525)29.4.24Debug模式 (526)29.5.1ATIM控制寄存器1(ATIM_CR1) (527)29.5.2ATIM控制寄存器2(ATIM_CR2) (529)29.5.3ATIM从机模式控制寄存器(ATIM_SMCR) (530)29.5.4ATIM DMA和中断使能寄存器(ATIM_DIER) (532)29.5.5ATIM状态寄存器(ATIM_ISR) (533)29.5.6ATIM事件产生寄存器(ATIM_EGR) (535)29.5.7ATIM捕捉/比较模式寄存器1(ATIM_CCMR1) (535)29.5.8ATIM捕捉/比较模式寄存器2(ATIM_CCMR2) (538)29.5.9ATIM捕捉/比较使能寄存器(ATIM_CCER) (540)29.5.10ATIM计数器寄存器(ATIM_CNT) (541)29.5.11ATIM预分频寄存器(ATIM_PSC) (541)29.5.12ATIM自动重载寄存器(ATIM_ARR) (542)29.5.13ATIM重复计数寄存器(ATIM_RCR) (542)29.5.14ATIM捕捉/比较寄存器1(ATIM_CCR1) (543)29.5.15ATIM捕捉/比较寄存器2(ATIM_CCR2) (544)29.5.16ATIM捕捉/比较寄存器3(ATIM_CCR3) (544)29.5.17ATIM捕捉/比较寄存器4(ATIM_CCR4) (545)29.5.18ATIM刹车和死区控制寄存器(ATIM_BDTR) (545)29.5.19ATIM DMA控制寄存器(ATIM_DCR) (547)29.5.20ATIM DMA访问寄存器(ATIM_DMAR) (548)29.5.21ATIM刹车输入控制寄存器(ATIM_BKCR) (548)30通用定时器(GPTIM0,1,2) (550)30.1概述 (550)30.2主要特性 (550)30.3结构框图 (551)30.4功能描述 (552)30.4.1定时单元 (552)30.4.2定时器工作模式 (554)30.4.3计数器工作时钟 (561)30.4.4内部触发信号(ITRx)的捕捉 (567)30.4.5捕捉/比较通道 (568)30.4.6输入捕捉模式 (569)30.4.7软件Force输出 (571)30.4.8输出比较模式 (571)30.4.9PWM模式 (572)30.4.10单脉冲输出 (573)30.4.11外部事件清除OCxREF (575)30.4.12编码器接口模式(encoder interface) (575)30.4.13GPTIM从机模式 (576)30.4.14DMA访问 (579)30.4.15DMA Burst (580)30.4.16输入异或功能 (580)30.4.17Debug模式 (580)30.5寄存器 (581)30.5.1GPTIMx控制寄存器1(GPTIMx_CR1) (583)30.5.2GPTIMx控制寄存器2(GPTIMx_CR2) (584)30.5.3GPTIMx从机模式控制寄存器(GPTIMx_SMCR) (585)30.5.4GPTIMx DMA和中断使能寄存器(GPTIMx_DIER) (587)30.5.5GPTIMx状态寄存器(GPTIMx_ISR) (588)30.5.6GPTIMx事件产生寄存器(GPTIMx_EGR) (589)30.5.7GPTIMx捕捉/比较模式寄存器1(GPTIMx_CCMR1) (590)30.5.8GPTIMx捕捉/比较模式寄存器2(GPTIMx_CCMR2) (592)30.5.9GPTIMx捕捉/比较使能寄存器(GPTIMx_CCER) (595)30.5.10GPTIMx计数器寄存器(GPTIMx_CNT) (596)30.5.11GPTIMx预分频寄存器(GPTIMx_PSC) (596)30.5.12GPTIMx自动重载寄存器(GPTIMx_ARR) (597)30.5.13GPTIMx捕捉/比较寄存器1(GPTIMx_CCR1) (597)30.5.14GPTIMx捕捉/比较寄存器2(GPTIMx_CCR2) (598)30.5.15GPTIMx捕捉/比较寄存器3(GPTIMx_CCR3) (598)30.5.16GPTIMx捕捉/比较寄存器4(GPTIMx_CCR4) (599)30.5.17GPTIMx DMA控制寄存器(GPTIMx_DCR) (599)30.5.18GPTIMx DMA访问寄存器(GPTIMx_DMAR) (600)30.5.19GPTIMx ITR选择寄存器(GPTIMx_ITRSEL) (601)3132位基本定时器(BSTIM32) (603)31.1概述 (603)31.2主要特性 (603)31.3结构框图 (603)31.4功能描述 (604)31.4.1定时单元 (604)31.4.2定时器工作模式 (606)31.4.3计数器工作时钟 (608)31.4.1Debug模式 (609)31.5寄存器 (610)31.5.1BSTIM32控制寄存器1(BSTIM32_CR1) (610)31.5.2BSTIM32控制寄存器2(BSTIM32_CR2) (611)31.5.3BSTIM32中断使能寄存器(BSTIM32_IER) (611)31.5.4BSTIM32中断标志寄存器(BSTIM32_ISR) (612)31.5.5BSTIM32事件产生寄存器(BSTIM32_EGR) (613)31.5.6BSTIM32计数器寄存器(BSTIM32_CNT) (613)31.5.7BSTIM32预分频寄存器(BSTIM_PSC) (614)31.5.8BSTIM32自动重载寄存器(BSTIM32_ARR) (614)3216位基本定时器(BSTIM16) (615)32.1概述 (615)32.2主要特性 (615)32.3结构框图 (615)32.4功能描述 (616)32.4.1定时单元 (616)32.4.2定时器工作模式 (618)32.4.3计数器工作时钟 (620)32.4.4Debug模式 (621)32.5寄存器 (622)32.5.1BSTIM16控制寄存器1(BSTIM16_CR1) (622)32.5.2BSTIM16控制寄存器2(BSTIM16_CR2) (623)32.5.3BSTIM16中断使能寄存器(BSTIM16_IER) (624)32.5.4BSTIM16中断标志寄存器(BSTIM16_ISR) (624)32.5.5BSTIM16事件产生寄存器(BSTIM16_EGR) (625)32.5.1BSTIM16计数器寄存器(BSTIM16_CNT) (625)32.5.1BSTIM16预分频寄存器(BSTIM16_PSC) (626)32.5.1BSTIM16自动重载寄存器(BSTIM16_ARR) (626)3332位低功耗定时器(LPTIM32) (628)33.1概述 (628)33.2结构框图 (629)33.5定时器功能 (630)33.5.1普通定时器 (630)33.5.2外部脉冲触发计数 (630)33.5.3外部异步脉冲计数 (631)33.5.4Timeout模式 (631)33.6捕捉比较功能 (632)33.6.132bit PWM (632)33.6.2输入捕捉 (633)33.7触发信号输出 (634)33.8寄存器 (635)33.8.1LPTIM32配置寄存器(LPTIM32_CFGR) (635)33.8.2LPTIM32计数值寄存器(LPTIM32_CNT) (637)33.8.3LPTIM32捕捉比较控制和状态寄存器(LPTIM32_CCSR) (637)33.8.4LPTIM32目标值寄存器(LPTIM32_ARR) (639)33.8.5LPTIM32中断使能寄存器(LPTIM32_IER) (640)33.8.6LPTIM32中断标志寄存器(LPTIM32_ISR) (641)33.8.7LPTIM32控制寄存器(LPTIM32_CR) (642)33.8.8LPTIM32捕捉比较寄存器1(LPTIM32_CCR1) (643)33.8.9LPTIM32捕捉比较寄存器2(LPTIM32_CCR2) (643)33.8.10LPTIM32捕捉比较寄存器3(LPTIM32_CCR3) (644)33.8.11LPTIM32捕捉比较寄存器4(LPTIM32_CCR4) (644)3416位低功耗定时器(LPTIM16) (645)34.1概述 (645)34.2结构框图 (646)34.3时钟和复位 (646)34.4相关引脚 (647)34.5定时器功能 (647)34.5.1普通定时器 (647)34.5.2外部脉冲触发计数 (647)34.5.3外部异步脉冲计数 (648)34.5.4Timeout模式 (648)34.6捕捉比较功能 (649)34.6.116bit PWM (649)34.6.2输入捕捉 (650)34.6.3输入数字滤波 (651)34.7正交编码器 (652)34.8触发信号输出 (653)34.9寄存器 (654)34.9.1LPTIM16配置寄存器(LPTIM16_CFGR) (654)34.9.2LPTIM16计数值寄存器(LPTIM16_CNT) (656)34.9.3LPTIM16捕捉比较控制和状态寄存器(LPTIM16_CCSR) (656)34.9.4LPTIM16目标值寄存器(LPTIM16_ARR) (658)34.9.5LPTIM中断使能寄存器(LPTIM_IER) (659)34.9.6LPTIM16中断标志寄存器(LPTIM16_ISR) (659)34.9.7LPTIM16控制寄存器(LPTIM16_CR) (660)34.9.8LPTIM16捕捉比较寄存器1(LPTIM16_CCR1) (661)34.9.9LPTIM16捕捉比较寄存器2(LPTIM16_CCR2) (661)35实时时钟(RTCA) (663)35.1概述 (663)35.2结构框图 (663)35.3工作原理 (664)35.3.2LTBC数字调校 (665)35.3.3BCD时间 (666)35.3.4RTC使能与停止 (667)35.3.5RTC时间设置 (667)35.3.6RTC时间读取 (667)35.3.7闰年判断 (668)35.4寄存器 (669)35.4.1RTCA写使能寄存器(RTCA_WER) (669)35.4.2RTCA中断使能寄存器(RTCA_IER) (670)35.4.3RTCA中断标志寄存器(RTCA_ISR) (671)35.4.4BCD时间秒寄存器(RTCA_BCDSEC) (672)35.4.5BCD时间分钟寄存器(RTCA_BCDMIN) (673)35.4.6BCD时间小时寄存器(RTCA_BCDHOUR) (673)35.4.7BCD时间天寄存器(RTCA_BCDDAY) (674)35.4.8BCD时间星期寄存器(RTCA_BCDWEEK) (674)35.4.9BCD时间月寄存器(RTCA_BCDMONTH) (675)35.4.10BCD时间年寄存器(RTCA_BCDYEAR) (675)35.4.11闹钟寄存器(RTCA_ALARM) (676)35.4.12RTC时间信号输出寄存器(RTCA_TMSEL) (676)35.4.13LTBC数值调整寄存器(RTCA_ADJUST) (677)35.4.14毫秒计数值寄存器(RTCA_SBSCNT) (678)35.4.15RTCA控制寄存器RTCA_CR (678)36实时时钟(RTCB) (679)36.1概述 (679)36.2结构框图 (679)36.3工作原理 (680)36.3.1工作时钟 (680)36.3.2时基计数器(LTBC) (680)36.3.3LTBC数字调校 (680)36.3.4BCD时间 (682)36.3.5RTC使能与停止 (682)36.3.6RTC时间设置 (683)36.3.7RTC时间读取 (683)36.3.8闰年判断 (684)36.3.9RTC时间戳 (684)36.3.10备份寄存器 (685)36.4寄存器 (686)36.4.1RTCB写使能寄存器(RTCB_WER) (687)36.4.2RTCB中断使能寄存器(RTCB_IER) (687)36.4.3RTCB中断标志寄存器(RTCB_ISR) (688)36.4.4BCD时间秒寄存器(RTCB_BCDSEC) (689)36.4.5BCD时间分钟寄存器(RTCB_BCDMIN) (689)36.4.6BCD时间小时寄存器(RTCB_BCDHOUR) (690)36.4.7BCD时间天寄存器(RTCB_BCDDAY) (690)36.4.8BCD时间星期寄存器(RTCB_BCDWEEK) (691)36.4.9BCD时间月寄存器(RTCB_BCDMONTH) (691)36.4.10BCD时间年寄存器(RTCB_BCDYEAR) (692)36.4.11RTCB时间信号输出寄存器(RTCB_TMSEL) (692)36.4.12RTCB时钟调校寄存器(RTCB_ADJR) (693)36.4.13RTCB控制寄存器(RTCB_CR) (693)36.4.14RTCB时间戳控制寄存器(RTCB_STPCR) (694)36.4.15RTCB时间戳时钟寄存器(RTCB_STPCLKRR) (695)36.4.16RTCB时间戳日历寄存器(RTCB_STPCALRR) (695)36.4.17RTCB备份寄存器组(RTCB_BKRx) (696)37段码液晶驱动(LCD) (697)37.1概述 (697)37.2结构框图 (697)37.3IO配置 (699)37.4功能说明 (699)37.4.1工作时钟和显示帧频率 (699)37.4.2LCD Type A扫描波形 (699)37.4.3LCD Type B扫描波形 (704)37.4.4片内buffer驱动模式 (708)37.4.5片外电容驱动模式 (708)37.4.6显示闪烁功能 (709)37.4.7偏置电压调整 (709)37.5低功耗模式 (710)37.6寄存器 (711)37.6.1显示控制寄存器(LCD_CR) (711)37.6.2显示测试控制寄存器(LCD_TEST) (713)37.6.3显示频率控制寄存器(LCD_FCR) (714)37.6.4闪烁时间寄存器(LCD_FLKT) (715)37.6.5显示中断使能寄存器(LCD_IER) (715)37.6.6显示中断标志寄存器(LCD_ISR) (716)37.6.7显示数据寄存器(LCD_DATAx) (716)37.6.8LCD COM使能控制寄存器(LCD_COMEN) (723)37.6.9LCD SEG使能控制寄存器0(LCD_SEGEN0) (723)37.6.10LCD SEG使能控制寄存器1(LCD_SEGEN1) (724)38模数转换器(ADC) (725)38.1概述 (725)38.2结构框图 (726)38.3输入通道 (727)38.4单端和差分输入 (728)38.5工作时序 (730)38.6功能描述 (732)38.6.1使用VDDA作为基准 (732)38.6.2使用VREFP作为基准 (733)38.6.3温度传感器 (733)38.6.4温度传感器的斜率和标定 (734)38.6.5可编程采样时间 (734)38.6.6输出位宽选择 (736)38.6.7输入缓冲器 (736)38.6.8VBAT和VDD电源电压采样 (737)38.6.9内部信号采样 (737)38.6.10转换模式 (738)38.6.11转换触发 (741)38.6.12过采样和硬件平均 (742)38.6.13ADC工作时钟 (743)38.6.14数据冲突和自动等待 (743)38.6.15DMA (744)38.6.16模拟窗口看门狗(AWD) (750)38.6.17ADC校准 (751)38.8寄存器 (753)38.8.1ADC中断和状态寄存器(ADC_ISR) (753)38.8.2ADC中断使能寄存器(ADC_IER) (754)38.8.3ADC控制寄存器1(ADC_CR1) (755)38.8.4ADC控制寄存器2(ADC_CR2) (755)38.8.5ADC校准控制寄存器(ADC_CALR) (756)38.8.6ADC配置寄存器1(ADC_CFGR1) (757)38.8.7ADC配置寄存器2(ADC_CFGR2) (758)38.8.8ADC采样时间控制寄存器(ADC_SMTR) (760)38.8.9ADC通道控制寄存器(ADC_CHER) (762)38.8.10ADC通道差分控制寄存器(ADC_DCR) (763)38.8.11ADC数据寄存器(ADC_DR) (763)38.8.12AWD阈值寄存器(ADC_HLTR) (764)39数模转换器(DAC) (765)39.1概述 (765)39.2结构框图 (765)39.3引脚定义 (766)39.4DAC输出与引脚和其他模块的互联 (766)39.5功能描述 (767)39.5.1工作时钟与信号时序 (767)39.5.2DAC输出模式 (767)39.5.3DAC触发源选择 (769)39.5.4DAC输出电压 (769)39.5.5DMA (769)39.5.6采样保持 (770)39.5.7DAC输出Buffer (772)39.5.8低功耗模式下的DAC (773)39.6寄存器 (774)39.6.1DAC控制寄存器1(DAC_CR1) (774)39.6.2DAC控制寄存器2(DAC_CR2) (774)39.6.1DAC配置寄存器(DAC_CFGR) (775)39.6.2DAC软件触发寄存器(DAC_SWTRGR) (776)39.6.3DAC数据保持寄存器(DAC_DHR) (776)39.6.4DAC状态标志寄存器(DAC_ISR) (777)39.6.5DAC中断使能寄存器(DAC_IER) (777)39.6.1DAC采样保持时间寄存器(DAC_SHTR) (778)40可编程胶合逻辑(PGL) (780)40.1概述 (780)40.2结构框图 (780)40.3引脚定义 (782)40.4功能描述 (783)40.4.1LUT真值表 (783)40.4.2LUT输入 (784)40.4.3LUT输出 (784)40.4.4滤波和采样 (784)40.4.5中断和触发 (785)40.4.6低功耗模式 (786)40.5寄存器 (787)40.5.1PGL控制寄存器(PGL_CR) (787)40.5.2PGL配置寄存器0(PGL_CFGR0) (788)40.5.3PGL配置寄存器1(PGL_CFGR1) (789)40.5.5PGL配置寄存器3(PGL_CFGR3) (791)40.5.6PGL中断使能寄存器(PGL_IER) (792)40.5.7PGL中断标志寄存器(PGL_ISR) (793)40.5.8LUT0真值表寄存器(PGL_LUT0) (793)40.5.9LUT1真值表寄存器(PGL_LUT1) (794)40.5.10LUT2真值表寄存器(PGL_LUT2) (794)40.5.11LUT3真值表寄存器(PGL_LUT3) (795)41I/O端口(GPIO) (796)41.1概述 (796)41.2引脚类型 (796)41.2.1GPIO,输入输出使能,可控上拉电阻,可控开漏输出 (797)41.2.2GPIO,输入输出使能,2个可控上拉电阻,可控开漏输出(仅PC12-7816数据口) (798)41.3IO端口功能定义 (798)41.3.1GPIO输入 (798)41.3.2GPIO输出 (799)41.3.3数字外设功能 (799)41.3.4模拟功能 (801)41.3.5使用外部晶体引脚 (802)41.4VBAT供电引脚 (802)41.5SWD引脚 (803)41.6WKUP X引脚 (803)41.7外部引脚中断(EXTI) (804)41.7.1功能说明 (804)41.7.2应用指南 (805)41.8快速GPIO输出 (806)41.9寄存器 (807)41.9.1GPIO输入使能寄存器(GPIOx_INEN) (810)41.9.2GPIO上拉使能寄存器(GPIOx_PUEN) (810)41.9.3GPIO开漏使能寄存器(GPIOx_ODEN) (811)41.9.4GPIO功能选择寄存器(GPIOx_FCR) (811)41.9.5GPIO输出数据寄存器(GPIOx_DO) (813)41.9.6GPIO输出数据置位寄存器(GPIOx_DSET) (814)41.9.7GPIO输出数据复位寄存器(GPIOx_DRST) (814)41.9.8GPIO输入数据寄存器(GPIOx_DIN) (815)41.9.9GPIO额外数字功能选择寄存器(GPIOx_DFS) (816)41.9.10GPIO模拟开关使能寄存器(GPIOx_ANEN) (816)41.9.11GPIO输入低阈值配置寄存器(GPIOx_VILR) (817)41.9.12EXTI输入选择寄存器0(GPIO_EXTISEL0) (817)41.9.13EXTI输入选择寄存器1(GPIO_EXTISEL1) (819)41.9.14EXTI边沿选择和使能寄存器0(GPIO_EXTIEDS0) (820)41.9.1EXTI边沿选择和使能寄存器1(GPIO_EXTIEDS1) (821)41.9.2EXTI数字滤波控制寄存器(GPIO_EXTIDF) (822)41.9.3EXTI中断标志(GPIO_EXTIISR) (822)41.9.4EXTI输入信号寄存器(GPIO_EXTIDI) (823)41.9.5FOUT配置寄存器(GPIO_FOUTSEL) (823)41.9.6WKUP控制寄存器(GPIO_PINWKEN) (824)42专用编程接口 (826)42.1概述 (826)42.2编程器使用 (826)43调试支持 (827)43.1概述 (827)43.2D EBUG引脚 (828)43.2.1SWD引脚 (828)43.2.2上拉电阻 (828)43.3SWD接口协议 (829)43.3.1协议简介 (829)43.3.2传输序列 (829)43.3.3SW-DP ID code (830)43.3.4主机读操作 (830)43.3.5主机写操作 (831)43.4SWD-DP寄存器 (832)43.4.1寄存器列表 (832)43.5C ORE DEBUG寄存器 (832)43.6低功耗调试支持 (832)43.7D EBUG相关的配置项 (833)43.8寄存器 (833)43.8.1系统模式配置寄存器 (833)43.8.2MCU DEBUG配置寄存器 (834)43.8.3HardFault查询寄存器 (835)44器件签名信息 (837)44.1存储器容量查询 (837)44.2器件UID (838)版本列表 (839)上海复旦微电子集团股份有限公司销售及服务网点 (840)。
微型850工作站微850工作站主要组件说明书
Training WorkstationMicro850 WorkstationMAJOR COMPONENTS Catalog NumberUnit Dimensions• Width: 11.5 in (29.2 cm)• Height: 18 in (45.7 cm)• Depth: 10 in (25.4 cm)• Weight: 9.8 lb (4.44 kg)For the size with optional shipping case, add 3 in (8 cm) to the width and depth, and 8 in (20 cm) to the height.Estimated Lead Time7 weeks. Some items are available for immediate shipment. Please call for availability.220-240V Plug OptionsSee the available document on Literature Library for 220-240V Plug Options for Workstations used in EMEA/AP (GMST10-PP524).Related ProductsThe workstation can be used in conjunction with the following products:• All Studio 5000 Logix Designer® Software Procedures Guides• ControlLogix® Troubleshooting Guide (ABT-1756-TSJ20)• Many labs books in the ControlLogix/Studio 5000® curriculum*Important Ordering Information• To order either unit with a case, please add C to the end of the part number.• To disassemble and rebuild the unassembled version, additional wiring kits are available for purchase. Please order ABT-TDM850KIT.• An assembled unit can be programmed using the Connected Components Workbench™ software, available for download at no cost at /Programmable-Controllers/Micro800.Allen-Bradley, Connected Components Workbench, ControlLogix, expanding human possibility, Micro800, Micro850, Studio 500 and Studio 5000 Logix Designer are trademarks of RockwellAutomation, Inc. Trademarks not belonging to Rockwell Automation are property of their respective companies.Publication GMST10-PP547E-EN-E – February 2020 | Supersedes Publication GMST10-PP547D-EN-E – April 2016Copyright © 2020 Rockwell Automation, Inc. All Rights Reserved. Printed in USA.To be respectful of the environment, Rockwell Automation is transitioning some of its training courses to a paperless format. Students are asked to complete downloads and bring personal devices to these classes. A full list of digital/paperless courses is currently available through your local distributor.。
SMH-50 50 50-150-XL 硬體操作說明書说明书

SMH-50/50/50-150-XL 硬体操作说明书匯出日期:2023-10-19修改日期:2021-04-19•••••••••••••••••••••••目录序言适用机型硬体规格说明外观介绍外形尺寸驱动器规格搬运与安装搬运安装环境条件与注意事项配线与信号周边装置接线图驱动器的连接器与端子说明各式配线图串列向量配线图新代编码器外接类比温感配线图多台四合一串联说明回生电阻选用简易回生电阻选择详细回生电阻选择KTY84温感器与过温度保护功能安装驱动器参数设定版本号编修日期编修内容作者审查核准V1.22022-6-30修正为SMD-34B-50150-xx 硬体操作说明书带电池盒乃维V1.12020-7-23刪去電容吸收能量Ec黃揚程V1.02018/10/04新增SMD-34B-50150-xx 硬体操作说明书杨娟HomePageSYNTEC伺服操作说明书文件资讯文件履历文件资讯文件履历1 序言感谢您长期对本公司产品的使用与支持。
本公司伺服团队不断致力於各项产品的研发,期许本公司产品与服务能给使用者带来最大的效益。
新代高性能驱动器系列产品为本公司最新推出之伺服驱动器,本产品使用高品质之元件与材料,并经过严格测试,采用精密向量控制,具有高精确度、高稳定性、高效率之特性。
本使用说明内容包括驱动器的硬体规格、安装、配线与讯号,能提供给使用者最正确的指引与操作,为充分发挥产品应有的优异性能与维护人员及设备的安全,在使用前请详细阅读本使用手册,并且妥善保存,以备日後调校与保养时使用,若有任何疑虑,请与本公司联络,本公司专业人员将竭诚为您服务。
2 适用机型本操作手册适用於新代 3KWX3+18.5KW四合一驱动器3 硬体规格3.1 说明每部驱动器在出厂前均经过详细品管检查与防撞包装处理,请使用者收到产品後应先检查外观有无撞击损伤,并将外盒与产品上之序号做比对是否一致,若有不符,请第一时间与本公司联络。
型号说明3.2 外观介绍SMH-50/50/50-150-XL驱动器功能模块说明A外供电源输入接点连接380V~440V三相交流电(RST) B马达驱动电源输出接点连接马达侧提供马达电源(UVW)由右至左分别为第一至第四轴C煞车电阻接点煞车电阻接点(P-B)D MIII串行通讯接孔连接上位控制器(MIII讯号)连接串行驱动器 (MIII讯号) E Mini USB接孔连接个人计算机调机使用F I/O讯号端口外接电池端口连接I/O设备(急停、警示灯…等)连接绝对型编码器供电电池G STO讯号端口STO接口,2组安全输入,1组安全功能回授H编码器回授接孔由上至下分别为第一至第四埠。
微850控制器、插件和扩展I O模块以及电源供应器安装指南说明书

COURSE CONTENT•Installing Micro850™ Controllers, Plug-in and Expansion I/O Modules, and Power Supplies •Wiring Micro850™ Controllers and Power Supplies•Installing and Wiring Input and Output Devices to Micro850™ Controllers•Establishing EtherNet/IP™ Communications and Validating Micro850™ Controller Firmware •Creating a New Connected Components Workbench™ Project •Configuring Plug-in and Expansion I/O Modules for Micro850™ Controllers•Organizing Functional Specifications for Micro850™ Controllers•Programming Micro850™ Controllers Using Basic Ladder Diagrams•Programming Micro850™ Controllers Using Ladder Diagrams with Boolean Instructions •Programming Micro850™ Controllers Using Ladder Diagrams with Data Conversion, Arithmetic, and Comparator Instructions •Programming Micro850™ Controllers Using Ladder Diagrams with Counter and Timer Instructions•Programming Micro850™ Controllers Using Function Block Diagrams•Programming Micro850™ Controllers Using Structured Text •Isolating the Problem When Troubleshooting with Micro850™ Controllers•Troubleshooting Inputs and Outputs of Micro850™ Controllers •Troubleshooting Micro850™ Controllers and Power SuppliesCourse PurposeAfter completing this course, students should have a solid understanding of Micro850 programmable logic controllers. Topics range from installingMicro850 system components to troubleshooting a Micro850 programmable logic controller.As students learn about Micro850 controllers and components, hands‐on exercises will allow students to practice how to:•Fully wire, install, and configure a Micro850 workstation•Program the controller using the available programming languages•Develop troubleshooting skills needed to assess abnormal conditions ina working systemEngaging student materials, classroom discussions, lab exercises, and supplemental videos, podcasts, web links, and demonstrations, combine to give students a highly interactive classroom experience. The variety of learning resources and integrated activities in this class will give students a solid programming and troubleshooting foundation and prepare them for more advanced automation-related courses.Learning Activities and FeaturesThis course includes various learning activities and features, including:•Lab Exercises - Students will gain hands-on experience with the Micro850 controller and components by using the workstation.•Videos/Animations - Students will view a wide variety of videos and animations to enhance concepts and provide real-world examples. •Podcasts - Students will be able to listen to interviews with automation workers that use micro controllers.•Web links/QR tags - Students will be able to access supplemental information on their own using a computer or smart phone.College CurriculumMicro850™ Configuration, Programming, and Troubleshooting Course DescriptionGMST10-PP548B-EN-ECopyright ©2013 Rockwell Automation, Inc. All Rights Reserved. Printed in USA.AudienceThis course is intended for individuals who:•Have little experience with programmable logic controllers•Need to learn how to maintain, program andtroubleshoot a Micro850 controller and components •Are enrolled in a technical, industrial, mechatronics or automation-related college programCourse PrerequisitesAs a prerequisite to this course, students must have basic working knowledge of safe electrical practices.This includes but is not limited to the following:•Understanding electricity, how it works, and the dangers associated with electricity•Use of appropriate personal protective equipment (e.g. eye protection, gloves, etc.) • Identifying hazardous conditions •Adhering to all safety regulationsIMPORTANT:This course will not electrically qualify students to perform any electrical or electrical maintenance activities on electrical equipment.Course MaterialsRockwell Automation college training kits include the following instructional materials:•PowerPoint Presentation Slides – Provides the lecture material in an interesting and interactive visual format. These slides are designed to guide instructors through the course content, additional media, and activities available for each topic covered during lectures.•Student Book - Includes the key concepts, definitions, and examples presented in the course. The Student Book also contains links to the examples, videos, animations, podcasts, etc. that are a part of this highly interactive course.•Lab Book and Exercise CD - Provides student learning activities through practice and hands-on exercises.Workstation RequirementsThis course is designed for use with the Micro850 Workstation. Students will use this workstation to complete the exercises.The workstation includes a Micro850 controller, discrete and analog I/O devices, plug-in and expansion I/O modules, power cord, power supply, other standard automation components, and wiring kit. The wiring kit, which can be used to reassemble the workstation, is also available for purchase separately. It includes wiring, a wiring harness, connectors, and cable ties.Front Back Wiring Kit Catalog Numbers:Workstation: ABT-TDM850 Wiring Kit: ABT-TDM850KITHands-On PracticeThroughout this course, students will practice the skills they have learned through a variety of hands-on exercises and interactive activities using the Micro850 Workstation. Students will build and configure their own Micro850 Workstation – from installation of the controller to assembly and wiring of the I/O devices. They will also program their Micro850 controller using Ladder Diagram, Function Block, and Structured Text programming languages. Students will then troubleshoot Micro850 control system components. Course Length Lecture: 15 hoursLab: 25-30 hoursThis course can be delivered within a college semester or two college quarters.Purchasing InformationInstructor Training Kit Catalog Number: TCT-M850-TIP Student Training Kit Catalog Number: TCT-M850-TSPTo purchase this or any other Rockwell Automation college training kits and workstations, contact your local authorized Allen-Bradley Distributor, your localRockwell Automation Sales/Support office, or call 440-646-3434, select option 4.。
一种基于LM5050芯片的冗余电路[实用新型专利]
![一种基于LM5050芯片的冗余电路[实用新型专利]](https://img.taocdn.com/s3/m/f343e522cd7931b765ce0508763231126edb773f.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201921823076.9(22)申请日 2019.10.28(73)专利权人 西安福华力能电源有限公司地址 710065 陕西省西安市高新区高新六路18号(72)发明人 辛帅 张厚友 (74)专利代理机构 西安佳士成专利代理事务所合伙企业(普通合伙) 61243代理人 李东京 李丹(51)Int.Cl.H02M 1/00(2007.01)H02M 1/32(2007.01)H02M 1/14(2006.01)(54)实用新型名称一种基于LM5050芯片的冗余电路(57)摘要本实用新型提供了一种基于LM5050芯片的冗余电路,包括:并联输出至电源总线上的多个供电支路,每个供电支路包括控制模块;该控制模块包括:LM5050控制芯片和MOS管,MOS管的G极连接LM5050控制芯片的控制引脚,MOS管的S极接本供电支路的供电端,MOS管的D极接本供电支路的输出端;本供电支路的供电端接LM5050控制芯片的检测输入引脚,本供电支路的输出端接LM5050控制芯片的检测输出引脚。
本实用新型的冗余电路,在每个供电支路增加LM5050MK -1/NOPB控制芯片检测供电端与输出端的压差,来控制MOS管的通断,实现冗余功能。
具有压降小、功耗小、设计简单、易操作等特点。
权利要求书1页 说明书3页 附图1页CN 212518757 U 2021.02.09C N 212518757U1.一种基于LM5050芯片的冗余电路,其特征在于,包括:并联输出至电源总线上的多个供电支路,每个供电支路包括控制模块;该控制模块包括:LM5050控制芯片、MOS管、连接在LM5050控制芯片和MOS管供电端的滤波电容,该滤波电容用于储能和滤波;MOS管的G极连接LM5050控制芯片的控制引脚,MOS管的S极接本供电支路的供电端,MOS 管的D极接本供电支路的输出端;本供电支路的供电端接LM5050控制芯片的检测输入引脚,本供电支路的输出端接LM5050控制芯片的检测输出引脚;LM5050控制芯片持续监测供电端与输出端的压差,当供电端电压比输出端电压高时,MOS管导通,使本供电支路工作;当供电端电压比输出端电压低时,MOS关断,使本供电支路断开。
施耐德伺服控制器50针引脚说明

《施耐德伺服控制器50针引脚说明》1. 引言施耐德伺服控制器在工业自动化领域有着广泛的应用,其50针引脚是其中一个重要的部分。
本文将从深度和广度的角度对施耐德伺服控制器50针引脚进行全面评估,帮助读者更好地理解其功能和用途。
2. 50针引脚的基本结构和功能施耐德伺服控制器的50针引脚是连接其它设备和组件的重要接口,主要用于传输信号和数据。
其中包括控制信号的输入和输出、电源接口、通信接口等。
在使用过程中,正确连接和使用50针引脚能够有效地实现设备的控制和数据传输,确保设备的正常运行。
3. 50针引脚的详细说明从物理接口到功能接口,施耐德伺服控制器的50针引脚具有丰富的功能和用途。
通过对每个引脚的详细说明,我们可以更清晰地了解其在设备控制和通信中扮演的角色。
第1至10号引脚用于电源输入和地线接口,第11至20号引脚用于数字输入/输出控制,第21至30号引脚用于模拟输入/输出信号等。
这些详细说明对于工程师和技术人员来说具有重要的参考价值。
4. 施耐德伺服控制器50针引脚的应用案例分析在实际的工业自动化应用中,施耐德伺服控制器的50针引脚具有丰富的应用案例。
通过对不同行业和领域的实际案例分析,我们可以更好地了解其在不同情境下的应用和价值。
在机械制造领域的数控设备中,通过对控制接口的合理应用,能够实现设备的精准控制和自动化生产;在电力系统中,通过连接通信接口,实现设备之间的数据交换和协同工作。
5. 总结和回顾通过本文的介绍和分析,我们对施耐德伺服控制器50针引脚的功能和用途有了更深入的了解。
这些了解不仅有助于我们在实际工程项目中更好地应用施耐德伺服控制器,也有助于我们更好地理解工业自动化领域的相关知识和技术。
在今后的学习和工作中,我们可以根据这些了解更好地应对相关挑战和问题,提高自己的专业能力和技术水平。
6. 个人观点和理解作为一名工程师/技术人员,我对施耐德伺服控制器50针引脚有着深刻的理解和应用经验。
mcu端口控制复位脚的用法

mcu端口控制复位脚的用法
MCU(微控制器)的端口控制复位脚是一种特殊的引脚,用于在需要时将设备重置为默认状态。
下面是使用MCU端口控制复位脚的一般步骤:
确认MCU具有复位脚:并非所有的MCU都具有复位脚。
因此,首先需要查阅MCU 的数据手册或技术规格,以确定MCU是否具有复位脚。
连接复位脚:根据MCU的规格和设计,将复位脚连接到适当的电路中。
通常情况下,复位脚会连接到电源、地线或上拉/下拉电阻器上。
配置MCU:在使用MCU之前,需要通过编程或配置工具来配置MCU。
在配置过程中,可以选择将复位脚配置为输入或输出模式。
如果选择输出模式,则可以控制复位脚的电平,从而触发设备复位。
控制复位脚:一旦MCU被配置为输出模式,就可以通过编程或外部电路来控制复位脚的电平。
通常情况下,当复位脚处于低电平时,设备将被重置为默认状态。
监控复位脚:在设备运行期间,需要监控复位脚的电平状态。
如果复位脚变为低电平,则表示设备已触发复位操作。
此时,可以采取适当的措施来处理复位事件,例如重新启动应用程序或执行其他必要的操作。
需要注意的是,不同的MCU制造商和型号可能会有不同的复位脚配置和操作方式。
因此,在实际应用中,建议仔细阅读MCU的数据手册和技术规格,以确保正确地使用复位脚。
reset引脚拉低mcu不复位
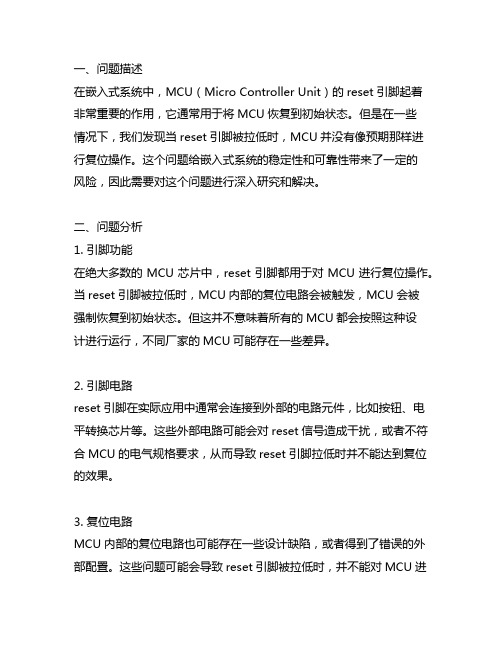
一、问题描述在嵌入式系统中,MCU(Micro Controller Unit)的reset引脚起着非常重要的作用,它通常用于将MCU恢复到初始状态。
但是在一些情况下,我们发现当reset引脚被拉低时,MCU并没有像预期那样进行复位操作。
这个问题给嵌入式系统的稳定性和可靠性带来了一定的风险,因此需要对这个问题进行深入研究和解决。
二、问题分析1. 引脚功能在绝大多数的MCU芯片中,reset引脚都用于对MCU进行复位操作。
当reset引脚被拉低时,MCU内部的复位电路会被触发,MCU会被强制恢复到初始状态。
但这并不意味着所有的MCU都会按照这种设计进行运行,不同厂家的MCU可能存在一些差异。
2. 引脚电路reset引脚在实际应用中通常会连接到外部的电路元件,比如按钮、电平转换芯片等。
这些外部电路可能会对reset信号造成干扰,或者不符合MCU的电气规格要求,从而导致reset引脚拉低时并不能达到复位的效果。
3. 复位电路MCU内部的复位电路也可能存在一些设计缺陷,或者得到了错误的外部配置。
这些问题可能会导致reset引脚被拉低时,并不能对MCU进行有效的复位操作。
4. 软件保护为了提高系统的稳定性和可靠性,MCU通常还会内置一些软件保护机制。
这些保护机制可能会对reset信号的触发条件和复位过程进行一些限制,但也可能会出现一些不符合预期的情况。
三、可能的解决方案1. 电路优化检查reset引脚的电路连接和外部元件,确保它们符合MCU的电气规格要求。
如果有必要,可以对reset引脚连接的电路进行优化和调整,以确保可以正常触发MCU的复位操作。
2. 复位信号检测通过示波器或者逻辑分析仪等工具对reset信号的波形进行检测,确保reset引脚被拉低时能够产生符合要求的电平和脉冲。
如果波形不符合要求,需要对外部电路进行调整或者更换合适的电路元件。
3. 软件修改如果复位问题是由于软件保护机制引起的,可能需要修改MCU的软件配置或者编写特定的复位处理程序,以确保reset引脚拉低时能够正常触发MCU的复位操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MCU50退针器
退针器有2个规格:退大的插针用的,和退小的的插针用的。
大的退针器用直径1mm的钢丝或铁丝制作。
退针器的两个针之间用锉刀磨平,每个针的厚度大概0.6~0.8mm。
长度大于25mm,针头部如示意图,两针之间距离3mm左右。
小的退针器用直径0.8mm的钢丝或铁丝制作。
退针器的两个针之间用锉刀磨平,每个针的厚度大概0.5mm。
长度大于25mm,针头部如示意图,两针之间距离2mm左右。
把手部分可以用铁丝缠绕;可以焊锡焊接,也可以用哥俩好胶粘贴固定。
然后套热缩管或颤胶带。
1.jpg是一根钢丝弯回来直接做的;
2.jpg和
3.jpg是用两根钢丝用哥俩好粘到钥匙(钥匙类似AGV控制柜的柜门钥匙)上的。
退针方法看最下面的2个图。
退针器插到底,则可以把插针顶出去。
示意图
1.jpg
2.jpg
3.jpg
大插针用的.jpg
小插针用的.jpg。