曾经的足迹——对Linux CAN驱动的理解(1) _ riaos
linux驱动开发知识点总结

linux驱动开发知识点总结Linux驱动开发是指在Linux操作系统下开发和编写设备驱动程序的过程。
Linux作为一种开源操作系统,具有广泛的应用领域,因此对于驱动开发的需求也非常重要。
本文将从驱动程序的概念、驱动开发的基本步骤、常用的驱动类型以及驱动开发的注意事项等方面进行总结。
一、驱动程序的概念驱动程序是指控制计算机硬件和软件之间通信和交互的程序。
在Linux系统中,驱动程序负责与硬件设备进行交互,实现对硬件的控制和管理。
二、驱动开发的基本步骤1. 确定驱动的类型:驱动程序可以分为字符设备驱动、块设备驱动和网络设备驱动等。
根据具体的硬件设备类型和需求,选择合适的驱动类型。
2. 编写设备注册函数:设备注册函数用于向系统注册设备,使系统能够识别和管理该设备。
3. 实现设备的打开、关闭和读写操作:根据设备的具体功能和使用方式,编写设备的打开、关闭和读写操作函数。
4. 实现设备的中断处理:如果设备需要进行中断处理,可以编写中断处理函数来处理设备的中断请求。
5. 编写设备的控制函数:根据设备的需求,编写相应的控制函数来实现对设备的控制和配置。
6. 编译和安装驱动程序:将编写好的驱动程序进行编译,并将生成的驱动模块安装到系统中。
三、常用的驱动类型1. 字符设备驱动:用于控制字符设备,如串口、打印机等。
字符设备驱动以字符流的方式进行数据传输。
2. 块设备驱动:用于控制块设备,如硬盘、U盘等。
块设备驱动以块为单位进行数据传输。
3. 网络设备驱动:用于控制网络设备,如网卡。
网络设备驱动实现了数据包的收发和网络协议的处理。
4. 触摸屏驱动:用于控制触摸屏设备,实现触摸操作的识别和处理。
5. 显示驱动:用于控制显示设备,实现图像的显示和刷新。
四、驱动开发的注意事项1. 熟悉硬件设备的规格和寄存器的使用方法,了解硬件设备的工作原理。
2. 确保驱动程序的稳定性和可靠性,避免出现系统崩溃或死机等问题。
3. 对于需要频繁访问的设备,要考虑性能问题,尽量减少对硬件的访问次数。
linux驱动开发通俗讲解
linux驱动开发通俗讲解Linux驱动开发是一门涉及操作系统和硬件交互的技术,它主要负责管理和控制硬件设备的操作。
比如,键盘、鼠标、打印机等设备,都需要相应的驱动程序来与操作系统进行通信。
在Linux系统中,驱动程序主要由内核提供,它们以模块的形式存在。
当我们插入一个新的设备时,操作系统会自动加载相应的驱动模块,并将其与设备进行绑定。
这样,设备就能被操作系统识别和使用了。
驱动开发涉及到硬件和软件两个方面。
首先,我们需要了解硬件设备的工作原理和通信协议。
有了这些基础知识,我们才能更好地理解设备的工作方式,并编写相应的驱动程序。
我们需要熟悉Linux内核的工作机制和API接口。
内核提供了一系列函数和数据结构,用于驱动程序与操作系统进行交互。
我们可以使用这些接口来访问设备的寄存器、发送控制命令、接收数据等。
在编写驱动程序时,我们需要按照一定的规范和流程进行。
首先,我们需要注册设备驱动程序,告诉操作系统我们要控制哪个设备。
然后,我们需要实现一系列的回调函数,用于处理设备的各种事件和操作。
这些回调函数会在相应的时机被内核调用。
在编写驱动程序时,我们还需要考虑设备的并发访问和错误处理。
由于设备可能同时被多个进程或线程访问,我们需要使用互斥锁等机制来保护共享资源,避免冲突和竞争条件的发生。
同时,我们还需要处理各种可能发生的错误和异常情况,保证系统的稳定性和可靠性。
驱动开发是一项需要耐心和细心的工作。
在编写驱动程序时,我们需要仔细阅读设备的文档和规格说明,了解其特性和限制。
我们还需要进行大量的测试和调试工作,确保驱动程序的正确性和稳定性。
总的来说,Linux驱动开发是一项非常重要的技术,它为我们提供了与硬件设备交互的能力。
通过编写驱动程序,我们可以更好地利用设备的功能,提升系统的性能和稳定性。
希望通过本文的介绍,读者能够对Linux驱动开发有一个初步的了解,并对其重要性有所认识。
LINUX设备驱动开发详解
LINUX设备驱动开发详解概述LINUX设备驱动开发是一项非常重要的任务,它使得硬件设备能够与操作系统进行有效地交互。
本文将详细介绍LINUX设备驱动开发的基本概念、流程和常用工具,帮助读者了解设备驱动开发的要点和技巧。
设备驱动的基本概念设备驱动是连接硬件设备和操作系统的桥梁,它负责处理硬件设备的输入和输出,并提供相应的接口供操作系统调用。
设备驱动一般由设备驱动程序和设备配置信息组成。
设备驱动程序是编写解决设备驱动的代码,它负责完成设备初始化、IO操作、中断处理、设备状态管理等任务。
设备驱动程序一般由C语言编写,使用Linux内核提供的API函数进行开发。
设备配置信息是定义硬件设备的相关参数和寄存器配置的文件,它告诉操作系统如何与硬件设备进行交互。
设备配置信息一般以设备树或者直接编码在设备驱动程序中。
设备驱动的开发流程设备驱动的开发流程包括设备初始化、设备注册、设备操作函数编写和设备驱动注册等几个主要步骤。
下面将详细介绍这些步骤。
设备初始化设备初始化是设备驱动开发的第一步,它包括硬件初始化和内存分配两个主要任务。
硬件初始化是对硬件设备进行基本的初始化工作,包括寄存器配置、中断初始化等。
通过操作设备的寄存器,将设备设置为所需的状态。
内存分配是为设备驱动程序分配内存空间以便于执行。
在设备初始化阶段,通常需要为设备驱动程序分配一块连续的物理内存空间。
设备注册设备注册是将设备驱动程序与设备对象进行关联的过程,它使得操作系统能够正确地管理设备。
设备注册包括设备号分配、设备文件创建等操作。
设备号是设备在系统中的唯一标识符,通过设备号可以找到设备对象对应的设备驱动程序。
设备号分配通常由操作系统负责,设备驱动程序通过注册函数来获取设备号。
设备文件是用户通过应用程序访问设备的接口,它是操作系统中的一个特殊文件。
设备文件的创建需要通过设备号和驱动程序的注册函数来完成。
设备操作函数编写设备操作函数是设备驱动程序的核心部分,它包括设备打开、设备关闭、读和写等操作。
曾经的足迹——对LinuxCAN驱动的理解(1)
曾经的⾜迹——对LinuxCAN驱动的理解(1)在Ti的AM335X系列Cortext-A8芯⽚中,CAN模块采⽤D_CAN结构,实质即两路CAN接⼝。
在此分享⼀下对基于AM335X的Linux CAN驱动源码的理解。
下⾯来分析它的驱动源码及其⼯作⽅式。
在Linux内核源码中,CAN设备驱动⽂件如下:drivers/net/can/d_can/d_can_platform.cdrivers/net/can/d_can/d_can.cdrivers/net/can/d_can/d_can.h⾸先分析d_can_platform.c⽂件,驱动运⾏时,也是先从这⾥开始。
⾸先是驱动⼊⼝函数:module_init(d_can_plat_init);static int __init d_can_plat_init(void){printk(KERN_INFO D_CAN_DRV_DESC "\n");return platform_driver_register(&d_can_plat_driver);}在驱动⼊⼝函数d_can_plat_init()中,使⽤platform_driver_register(&d_can_plat_driver)将结构体变量d_can_plat_driver注册为平台驱动。
static struct platform_driver d_can_plat_driver = {.driver = {.name = D_CAN_DRV_NAME,.owner = THIS_MODULE,},.probe = d_can_plat_probe,.remove = __devexit_p(d_can_plat_remove),};平台驱动中,最重要的是探测函数d_can_plat_probe。
探测函数主要的⼯作是获取平台设备传递过来的资源及初始化硬件。
linux驱动面试题
linux驱动面试题Linux驱动是指在Linux操作系统中,用于控制与硬件之间的交互和通信的软件模块。
在Linux的工作环境中,驱动程序起着至关重要的作用。
如果你准备参加Linux驱动的面试,以下是一些常见的Linux驱动面试题,希望可以对你有所帮助。
一、简述Linux驱动的作用和功能。
Linux驱动是一种软件模块,用来控制硬件设备与操作系统之间的通信和交互。
它负责将输入/输出请求传递给硬件设备,并处理来自硬件设备的中断和事件。
Linux驱动的功能包括设备初始化和配置、数据传输和处理以及错误处理等。
二、请简要介绍Linux驱动程序的加载过程。
当系统启动时,Linux内核首先会加载核心模块和驱动程序模块。
驱动程序模块是以目标硬件设备为基础的,它们包含了与设备通信所需的函数和数据结构。
一般情况下,系统会根据硬件设备信息自动加载对应的驱动程序模块。
加载驱动程序模块需要通过insmod或modprobe命令进行,这些命令可以在启动时自动执行。
三、请简述Linux驱动程序的实现方式。
Linux驱动程序的实现方式包括内核空间驱动和用户空间驱动。
内核空间驱动是指驱动程序运行在内核空间,直接与硬件设备进行交互。
用户空间驱动是指驱动程序运行在用户空间,通过系统调用和内核模块实现与硬件设备的通信。
内核空间驱动的优势是性能更好,但需要对内核进行编译和加载,而用户空间驱动的优势是开发更加容易,但性能会稍差。
四、请介绍Linux驱动程序中常用的数据结构和函数。
在Linux驱动程序中,常用的数据结构有file结构体、inode结构体和cdev结构体等。
file结构体用于表示一个打开的设备文件,可以通过它传递与设备相关的信息。
inode结构体用于表示一个文件的元数据信息,包括文件的权限、大小和创建时间等。
cdev结构体用于表示一个字符设备,包含了设备文件的操作函数和设备号等信息。
常用的函数包括register_chrdev、unregister_chrdev、request_irq和release_irq等。
linux内核驱动模型和实现原理
linux内核驱动模型和实现原理Linux内核驱动模型和实现原理:Linux内核是一个模块化的系统,它允许用户通过加载和卸载模块来扩展系统功能。
内核驱动程序是一种特殊类型的模块,它负责与硬件设备进行交互,控制设备的操作,并将设备的功能暴露给用户空间。
在Linux内核中,驱动程序的实现原理和模型是非常重要的。
首先,让我们来了解Linux内核驱动的模型。
Linux内核驱动模型主要由字符设备驱动、块设备驱动和网络设备驱动组成。
每种驱动类型都有自己的特点和工作方式。
字符设备驱动主要用于与字符设备进行交互,如终端设备、串口设备等。
字符设备驱动通常使用文件系统接口,通过文件描述符来访问设备,提供读写操作。
块设备驱动主要用于与块设备进行交互,如硬盘、闪存等。
块设备驱动负责管理设备的数据块,提供块设备的读写操作,支持文件系统的操作。
网络设备驱动主要用于与网络设备进行交互,如网卡、无线网卡等。
网络设备驱动负责管理网络设备的数据传输,实现网络协议栈的功能。
在Linux内核中,每种驱动类型都有对应的数据结构和函数接口,驱动程序通过这些接口与设备进行交互。
驱动程序的核心功能包括设备的注册、初始化、数据传输和中断处理等。
驱动程序的实现原理主要涉及以下几个方面:1.设备的注册和初始化:驱动程序在加载时需要将设备注册到内核中,以便内核能够识别设备并分配资源。
设备的初始化包括对设备的配置、内存的映射、中断的注册等操作。
2.数据传输和操作:驱动程序通过设备的接口进行数据的读写操作,如字符设备驱动可以使用read和write函数来进行数据传输,块设备驱动可以使用request和transfer函数来进行块的读写操作。
3.中断处理:设备通常会触发中断,驱动程序需要注册中断处理函数来处理设备的中断事件。
中断处理函数通常包括中断的处理、数据的传输、设备的复位等操作。
4.设备的管理和资源的释放:驱动程序需要负责设备的管理和资源的释放,包括设备的打开和关闭、内存的释放、中断的注销等操作。
嵌入式Linux下CAN总线驱动程序研究及应用
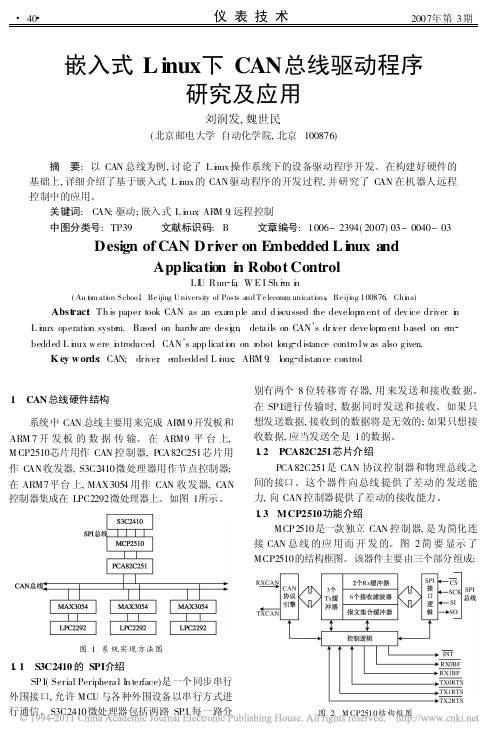
3 机器人远程监控系统实现 系统整体结构框图如图 3所示。
图 4 指令控制台
数据 , 所以先要把浮点数转化为字符型数据才可以 传送 , 这里设计了一个算法来实现了这个功能, 使向 CAN 总线发送的数据包含了第几组数据 , 第几个电 机, 规定的时间 , 正转反转以及转数等足够的控制信 息。这里我们主要应用 w rite( ) 和 read ( ) 两个接口
读写 CAN 总线的功能可以由 read( ) 和 w rite( ) 函数实现 , 通过传递不同的参数我们可以写入想要 传送的数据。 w rite( ) 系统调用的实现核心代码如 下:
stat ic ss ize_ tm cp2510 _ w r( stru ct file* file , char * bu , f size_t coun , t loff_t * offset) { dbuf= k m alloc( coun* t sizeof( un sign ed char) , GFP_KERNEL); copy_from _u ser( dbu,f bu, f count) ; TX data[ 2] = coun; t / /数据长度 / /实现从用户空间拷贝数 据到内核空间 for( i= 0 ; i< coun ; t i++ ) {TX data[ i+ 3] = dbu f[ i] ; } can _data_send( ) ; kfree( dbuf) ; } / /把数据发送到 CAN 总线
static struct file_operat ion s m cp2510 _fops= { ow ner : read : w rite: ioct: l open : }; TH IS_ M ODU LE, m cp2510_ rd , m cp2510_w r , m cp2510_ ioct, l m cp2510_op en , / /m cp2510_ fops所属的设备模块 / /从 CAN 总线读取数据 / /向 CAN 总线发送数据 / /提供 执行 设备特 定指 令的 方法 , 这里没有用到 / /打开设备 / /释放设备 release : m cp2510_close,
linux驱动面试题及答案

linux驱动面试题及答案一、概述在Linux开发领域,驱动程序是至关重要的组成部分。
为了帮助读者更好地准备Linux驱动开发面试,本文将介绍一些常见的Linux驱动面试题及其答案。
二、Linux驱动基础知识1. 什么是Linux驱动?答:Linux驱动是一段软件程序,用于与特定硬件设备进行通信,实现对硬件设备的控制和数据传输。
2. Linux驱动由哪些组成部分构成?答:Linux驱动由多个组成部分构成,包括设备和驱动模块。
设备代表硬件设备,而驱动模块负责驱动设备并与内核进行交互。
3. 内核态和用户态之间的区别是什么?答:内核态是操作系统的核心部分,具有最高的权限。
用户态是应用程序运行的环境,权限较低。
在内核态中,驱动可以直接访问硬件设备。
4. 请解释Linux设备树(Device Tree)是什么?答:Linux设备树是一种描述硬件设备及其连接方式的数据结构,用于在启动时为设备提供必要的参数和配置信息。
5. 使用哪个命令来加载和卸载Linux驱动?答:insmod命令用于加载驱动模块,rmmod命令用于卸载驱动模块。
三、Linux驱动开发相关问题6. 在Linux驱动中,什么是Platform驱动?答:Platform驱动是一种Linux内核驱动,用于支持与硬件设备直接连接的平台设备。
其驱动模块通过设备树(Device Tree)来识别和初始化设备。
7. 请解释字符设备驱动是什么?答:字符设备驱动是一种Linux驱动,用于支持以字符为单位进行I/O操作的设备,如串口、终端等。
8. 什么是中断处理程序?如何在Linux驱动中实现中断处理程序?答:中断处理程序是在CPU接收到硬件设备发出的中断信号时执行的函数。
在Linux驱动中,可以通过注册中断处理程序的方式来实现,通常使用request_irq函数来注册中断处理函数。
9. 在Linux驱动中,如何进行内存管理?答:在Linux驱动中,可以使用kmalloc和kfree函数来进行动态内存的分配和释放。
linux驱动知识点

Linux驱动相关的知识点包括:
驱动简介:Linux的驱动本质上就是一种软件程序,上层软件可以在不了解硬件特性的情况下,通过驱动提供的接口和计算机以及外设进行通信。
驱动程序将内核与硬件之间串联起来,为应用开发屏蔽了硬件的细节,使应用能够直接操作硬件。
对于Linux来说,硬件设备就是一个设备文件,应用程序可以像操作普通文件那样对硬件设备进行操作。
驱动分类:Linux将外设和存储器分为三个基础大类,分别是块设备驱动、字符设备驱动、网络设备驱动。
字符设备驱动是较为简单和初学者首先进行学习的驱动。
设备文件:Linux系统将所有的设备都当做文件来处理,每个设备都有一个对应的设备文件,应用程序通过访问这些设备文件来访问硬件。
主设备号和次设备号:主设备号用来表明设备的类型,与一个确定的驱动程序对应;次设备号则是用于标明不同的属性,例如不同的使用方法,不同的位置,不同的操作等,它标志着某个具体的物理设备。
加载和卸载驱动:在Linux中,可以使用insmod命令加载驱动模块,使用rmmod命令卸载驱动模块。
设备操作:Linux驱动中的设备操作包括对设备的初始化和释放、数据的传送、设备错误的检测和处理等。
读写设备:读写设备的主要任务就是把内核空间的数据复制到用户空间,或者从用户空间复制到内核空间。
以上是关于Linux驱动的一些主要知识点,但请注意,这些只是基础知识,深入学习还需要参考更详细的资料和实践经验。
了解Linux系统内核和驱动程序开发

了解Linux系统内核和驱动程序开发Linux系统内核是OS的核心组成部分,它连接了硬件和软件,允许软件与硬件交互。
内核需要有一个能够控制硬件的驱动程序。
在本文中,我们将介绍Linux系统内核和驱动程序开发的一些基本概念,以及如何了解和学习这些概念。
Linux系统内核是一个高度定制的操作系统内核,它可以定制化来适应不同的需求。
但是,无论哪种形式的Linux内核,它都负责处理硬件和为用户空间程序提供服务。
内核需要有针对每个硬件设备的设备驱动程序,以便内核和设备之间通信。
驱动程序开发是将新硬件添加到系统时必不可少的一部分。
开发驱动程序需要对内核响应机制的了解,以及对硬件的了解。
设备驱动程序应该提供一些API,可以由需要使用设备的软件来调用这些API。
了解内核认识一个软件产品的最好方法是阅读其源文件或代码。
在Linux中,内核的源代码是免费的,并且是公开的。
这为在深入了解内核的运作方式以及设计器提供了机会。
内核可在内核文件系统中找到,其中包括全部的源文件。
学习内核在学习内核时,第一步是学习操作系统概念。
有很多优秀的操作系统课程,可用于学习操作系统基本原理。
其次,学习一些基本的数据结构和算法,如链表、栈和队列。
然后,可以学习操作系统接口和内核概念。
这些可在内核源代码中找到。
了解内核APILinux内核暴露出一些API,允许编写驱动程序,这些API包括字符设备、块设备、网络设备等。
Linux设备驱动程序还应该提供一些常规操作设备的API,例如读写、打开和关闭。
这些API 可在内核中找到,也可以找到它们的文档。
了解驱动程序开发Linux内核设备驱动程序需要了解内核数据结构、API,以及所开发的设备硬件的特殊功能。
Linux内核驱动程序包括字符、块和网络驱动程序。
字符驱动程序传输ASCII数据,块驱动程序传输二进制数据,而网络驱动程序传输数据包。
Linux内核实现驱动程序的方式是通过系统调用。
在驱动程序开发之前,需要了解每个硬件设备的功能,以确保正确地实现设备函数。
Linux设备之网络驱动介绍

Linux设备之⽹络驱动介绍有线⽹络:以太⽹⽆线⽹络:4G、wifi、蓝⽛、5G总结:内部MAC + 外部PHY + RJ45 座(内置⽹络变压器)就组成了⼀个完整的嵌⼊式⽹络接⼝硬件。
内部的 MAC 外设会通过 MII 或者 RMII 接⼝来连接外部的 PHY 芯⽚, MII/RMII 接⼝⽤来传输⽹络数据。
另外主控需要配置或读取 PHY 芯⽚,也就是读写 PHY 的内部寄存器,所以还需要⼀个控制接⼝,叫做 MIDO, MDIO 很类似 IIC,也是两根线,⼀根数据线叫做 MDIO,⼀根时钟线叫做 MDC。
(1)数据链路层 MAC 是 Media Access Control 的缩写,即媒体访问控制⼦层协议。
该协议位于 OSI 七层协议中数据链路层的下半部分,主要负责控制与连接物理层的物理介质。
在发送数据的时候,MAC 协议可以事先判断是否可以发送数据,如果可以发送将给数据加上⼀些控制信息,最终将数据以及控制信息以规定的格式发送到物理层;在接收数据的时候,MAC 协议⾸先判断输⼊的信息并是否发⽣传输错误,如果没有错误,则去掉控制信息发送⾄ LLC 层。
以太⽹ MAC 由 IEEE-802.3 以太⽹标准定义。
(2)物理层 PHY 是物理接⼝收发器,它实现物理层。
包括 MII/GMII(介质独⽴接⼝)⼦层、PCS(物理编码⼦层)、PMA(物理介质附加)⼦层、 PMD(物理介质相关)⼦层、MDI ⼦层。
(3)MII 全称是 Media Independent Interface 即媒体独⽴接⼝ , “媒体独⽴”表明在不对 MAC 硬件重新设计或替换的情况下,任何类型的 PHY 设备都可以正常⼯作。
包括分别⽤于发送器和接收器的两条独⽴信道。
每条信道都有⾃⼰的数据、时钟和控制信号。
MII 数据接⼝总共需要 16 个信号,包括TX_ER,TXD<3:0>,TX_EN,TX_CLK,COL,RXD,RX_EX,RX_CLK,CRS,RX_DV 等。
Linux底层驱动开发的必备技能让你事半功倍
Linux底层驱动开发的必备技能让你事半功倍Linux底层驱动开发是一项技术挑战,但同时也是提高工作效率的关键。
掌握一些必备的技能能够让你在开发过程中事半功倍。
本文将介绍一些在Linux底层驱动开发中必备的技能,包括操作系统原理、编程语言和硬件知识,帮助你在这个领域取得成功。
一、操作系统原理在Linux底层驱动开发中,深入理解操作系统原理是非常重要的。
你需要了解操作系统的结构和运行机制,掌握Linux内核的基本概念和原理。
这将帮助你理解驱动程序与操作系统之间的交互方式,并为你解决一些常见问题提供指导。
其次,你还需要熟悉Linux内核的构建和调试过程。
在开发过程中,你可能需要修改内核源代码、编译和调试驱动程序。
对于这些工作,你需要掌握相应的工具和技巧,如make工具和GDB调试器。
二、编程语言掌握至少一种编程语言是进行底层驱动开发的基本要求。
C语言是最常用的选择,因为它与底层硬件交互的能力强并且与操作系统密切相关。
你需要熟练掌握C语言的语法和常用的库函数,并了解如何编写高效、可靠的代码。
此外,Shell脚本语言也是非常实用的工具。
它可以帮助你自动化一些日常任务,提高开发效率。
熟悉Shell脚本语言可以使你更好地理解和管理Linux系统。
三、硬件知识Linux底层驱动开发需要对硬件有一定的了解。
你需要知道驱动程序与硬件之间的通信方式,了解设备的寄存器和接口等。
在处理硬件问题时,必须具备一定的硬件知识,如电路原理、数字电子技术和信号处理等。
此外,熟悉硬件调试工具也是非常重要的。
你可能需要使用逻辑分析仪、示波器和调试器等工具来分析和解决硬件问题。
结语通过掌握操作系统原理、编程语言和硬件知识,你可以在Linux底层驱动开发中事半功倍。
了解操作系统原理可以帮助你更好地理解驱动程序与操作系统之间的交互方式;掌握编程语言可以编写高效、可靠的代码;了解硬件知识可以更好地处理硬件问题。
然而,理论知识并不是唯一的关键。
linux操作系统原理知识

linux操作系统原理知识磁盘是可被多个进程共享的设备。
常用的磁盘调度算法有:先来先服务、最短寻道时间优先、扫描算法和循环扫描算法等。
1、先来先服务FCFS算法:这是一种最简单的磁盘调度算法。
它根据进程请求访问磁盘的先后次序进行调度,平均寻道时间可能较长。
2、最短寻道时间优先SSTF算法:该算法总是为那些与当前磁头所在的磁道距离最近的请求服务,这种调度算法有较好的平均寻道时间,被广泛采用。
但它可能导致某些进程长时间的得不到服务(称之为饥饿现象)3、扫描(SCAN)算法:SCAN算法不仅考虑到欲访问的磁道与当前磁道的距离,更优先考虑的是磁头的当前移动方向,避免了饥饿现象的出现。
又称为电梯调度算法。
4、循环扫描CSCAN(CircularSCAN)算法:这是SCAN算法的一种变种算法,CSCAN算法规定磁头只能单向运动,当磁头运动到最外面的被访问磁道时,磁头立即返回到最里面的欲访的磁道。
5、N-Step-SCAN算法在SSTF、SCAN及CSCAN这几种算法中,都可能出现磁臂停留在某处不动的情况。
例如,有一个或几个进程对某一磁道有着较高的访问频率,反复请求对某一磁道进行I/O,从而垄断了整个磁盘设备,把这一现象称为“磁臂粘着”。
N步SCAN算法是将磁盘请求队列分成若干个长度为N的子队列,磁盘调度将按FCFS算法依次处理这些子队列,又按SCAN算法处理队列中的每一个请求,这样就可避免出现粘着现象。
当N值取得很大时,会使其性能接近于SCAN算法;当N=1时,该算法退化为FCFS算法。
二、外碎片和内碎片外碎片,操作系统自己浪费的空间一般是外碎片,比如动态内存分配时用户需求多少空间,操作系统就分配多少空间,此时会产生外碎片;再比如分段内存管理中每个段的大小不一,又要连续分配,此时容易产生外碎片。
用户自己浪费的空间一般是内碎片,比如分页机制中,操作系统给用户分配的是整页的空间,用户可能使用不完,此时剩余的空间就是内碎片。
Linux底层驱动开发的秘密揭秘让你成为专家
Linux底层驱动开发的秘密揭秘让你成为专家Linux操作系统的广泛应用和受欢迎程度使得对于Linux底层驱动开发的需求越来越大。
本文将揭秘Linux底层驱动开发的秘密,为开发人员提供专业知识和技巧,助您成为专家。
一、Linux底层驱动开发概览Linux底层驱动开发是指为硬件设备编写驱动程序,使其能够与Linux内核进行通信和协同工作。
底层驱动开发通常涉及熟悉Linux内核的设备模型、驱动框架、字符设备、块设备、中断处理以及设备树等概念。
1. 设备模型和驱动框架Linux内核通过设备模型来管理和描述系统中的硬件设备。
设备模型提供了一种结构化的方式来识别和访问设备。
驱动框架则提供了编写设备驱动的 API 和接口。
2. 字符设备和块设备字符设备和块设备是Linux中两种不同类型的设备。
字符设备处理每个字节的数据流,而块设备以块为单位进行数据传输。
开发人员需要了解如何编写适应不同设备类型的驱动程序。
3. 中断处理中断是一种机制,用于在设备发生事件时通知CPU进行处理。
在底层驱动开发中,合理处理中断是提高设备性能和系统稳定性的关键。
4. 设备树设备树是一种描述硬件设备和设备之间连接关系的数据结构。
在Linux底层驱动开发中,了解如何使用设备树来描述硬件设备是必不可少的技能。
二、Linux底层驱动开发的秘密揭秘1. 深入理解内核源码要成为Linux底层驱动的专家,深入理解 Linux 内核源码是必不可少的。
通过阅读内核文档和源代码,可以了解Linux内核的架构、数据结构和关键算法,从而更好地理解底层驱动开发的细节。
2. 理解硬件设备和寄存器底层驱动开发需要对硬件设备和寄存器有深入的了解。
掌握设备的工作原理、寄存器的读写方式以及设备和寄存器之间的通信协议是编写驱动程序的基础。
3. 调试和性能优化在驱动开发过程中,遇到问题是常有的事情。
了解如何使用调试工具和技巧,如 printk、Kprobe 和 GDB 等,可以快速定位和解决问题。
Linux底层驱动开发的新手福音手把手教你入门

Linux底层驱动开发的新手福音手把手教你入门Linux底层驱动开发的新手福音:手把手教你入门随着计算机技术的不断发展,Linux操作系统已经成为各个领域中使用最广泛的操作系统之一。
而在Linux系统中,底层驱动的开发对于系统的稳定性和性能至关重要。
对于初学者而言,了解Linux底层驱动开发的基本知识和技巧是必不可少的。
本文将从零开始,手把手地教你如何进行Linux底层驱动开发,带你入门这个令人兴奋的领域。
一、理解Linux底层驱动的基本概念在开始进行Linux底层驱动开发之前,首先需要理解底层驱动的基本概念。
驱动是系统与硬件设备之间的桥梁,它负责将操作系统的命令翻译为硬件设备的控制信号,实现系统对硬件设备的控制与管理。
二、准备开发环境在进行Linux底层驱动开发之前,首先需要搭建好相应的开发环境。
这包括安装Linux操作系统并配置好开发工具链,以及获取所需的驱动源代码。
三、编写自定义驱动程序编写自定义驱动程序是学习Linux底层驱动开发的重要一步。
下面是一个简单的示例代码,以帮助你更好地理解驱动程序的开发过程。
```c#include <linux/module.h>#include <linux/kernel.h>#include <linux/init.h>#include <linux/fs.h>MODULE_LICENSE("GPL");static int __init mydriver_init(void){printk(KERN_INFO "Mydriver: Initialization\n"); return 0;}static void __exit mydriver_exit(void){printk(KERN_INFO "Mydriver: Exit\n");}module_init(mydriver_init);module_exit(mydriver_exit);```以上代码是一个简单的驱动模块示例,它通过`printk`函数将信息打印到内核日志中。
Linux下设备完全驱动(一)——Linux设备驱动概述
Linux下设备完全驱动(一)——Linux设备驱动概述
郄晓烨
【期刊名称】《开放系统世界》
【年(卷),期】2004(000)007
【摘要】随着Linux系统的应用越来越普及,Linux的使用者已经不再局限于专业的开发人员,普通的计算机使用者也开始大量使用Linux操作系统。
但是作为一种类Unix系统,其设计的模式及特点与目前大量使用的Windows系统有很大的不同。
习惯了Windows系统对于Linux的一些概念常常无法准确理解,尤其是各种设备常常不能在Linux上使用。
本文将全面介绍Linux下设备驱动的框架、块设备驱动和网络驱动的配置安装、显示设备驱动和声卡驱动的配置安装、移动设备的驱动安装,以及打印机和扫描仪驱动的安装等,力求让大家能够自如应付处理遇到的各种Linux驱动程序的问题。
本文使用的操作平台为Red Hat Linux。
【总页数】5页(P100-104)
【作者】郄晓烨
【作者单位】无
【正文语种】中文
【中图分类】TP316.81
【相关文献】
1.ADS环境下开发嵌入式Linux设备驱动的研究与实现 [J], 马瑞骁;刘道林;于忠得
2.Linux设备驱动模块设计实例分析 [J], 赵志鹏
3.使用符号化驱动环境检测Linux设备驱动程序的漏洞 [J], 徐永健;王丹;陈渝;范文良
4.Linux设备驱动重用研究 [J], 王欢;茅俊杰;王丹;陈渝
5.Linux设备驱动程序自动更新及辅助工具 [J], 任艳艳;翟高寿;张俊红
因版权原因,仅展示原文概要,查看原文内容请购买。
linux设备驱动归纳总结(一):内核的相关基础概念
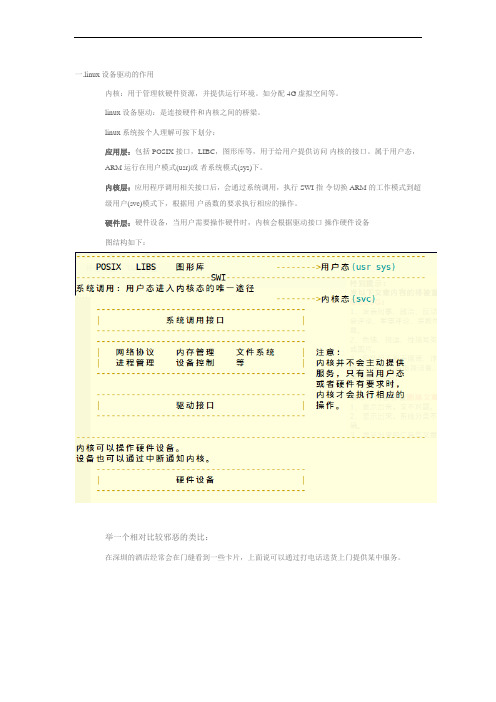
一.linux设备驱动的作用内核:用于管理软硬件资源,并提供运行环境。
如分配4G虚拟空间等。
linux设备驱动:是连接硬件和内核之间的桥梁。
linux系统按个人理解可按下划分:应用层:包括POSIX接口,LIBC,图形库等,用于给用户提供访问内核的接口。
属于用户态,ARM运行在用户模式(usr)或者系统模式(sys)下。
内核层:应用程序调用相关接口后,会通过系统调用,执行SWI指令切换ARM的工作模式到超级用户(svc)模式下,根据用户函数的要求执行相应的操作。
硬件层:硬件设备,当用户需要操作硬件时,内核会根据驱动接口操作硬件设备图结构如下:举一个相对比较邪恶的类比:在深圳的酒店经常会在门缝看到一些卡片,上面说可以通过打电话送货上门提供某中服务。
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx二.内核代码树介绍linux-2.6.29|-arch : 包含和硬件体系结构相关的代码|-block : 硬盘调度算法,不是驱动|-firmware : 固件,如BOIS|-Documentation: 标准官方文档|-dirver : linux设备驱动|-fs : 内核所支持的文件体系|-include :头文件。
linux/module.h linux/init.h 常用库。
|-init :库文件代码,C库函数在内核中的实现。
init/main.c ->start_kernel->内核执行第一条代码|-ipc : 进程件通信|-mm :内存管理|-kernel : 内核核心部分,包括进程调度等|-net :网络协议|-sound : 所有音频相关|其中,跟设备驱动有关并且经常查阅的文件夹有:initinclude : linux, asm-armdrivers:arch: xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx三.内核补丁:补丁一般都是基于某个版本内核生成的,用于升级旧内核。
CAN总线在Linux下的驱动设计
CAN总线在Linux下的驱动设计
苏春波
【期刊名称】《机电信息》
【年(卷),期】2011(000)024
【摘要】在介绍数字调音台系统整体功能的基础上,分析了CAN总线在数字调音台中的重要应用。
着重讨论了数字调音台的主控模块与被控端在CAN总线下的接口电路设计,以及在嵌入式Linux下用AT91RM9200对CAN总线接口的驱动编程。
【总页数】2页(P172-173)
【作者】苏春波
【作者单位】四川省机械技工学校,四川成都610051
【正文语种】中文
【中图分类】TP311.56
【相关文献】
1.Linux系统下基于SPI总线的外部A/D驱动设计 [J], 赵盼;李俊;周海峰
2.CAN总线在Linux下的驱动设计 [J], 苏春波
3.Linux系统下PCIE to RapidIO桥驱动设计与实现 [J], 李红兵
4.Linux文本模式下触摸屏的驱动设计及校准 [J], 徐杰
5.基于嵌入式Linux的CAN总线驱动设计与实现 [J], 周宇;徐寅林;李杰
因版权原因,仅展示原文概要,查看原文内容请购买。
Linux下CAN控制器驱动程序的设计方法研究
Linux下CAN控制器驱动程序的设计方法研究
陈程;陈楸
【期刊名称】《微型电脑应用》
【年(卷),期】2008(24)1
【摘要】在嵌入式操作系统Linux中使用各类CAN总线控制器,都需要设计相应的驱动程序.本文以CAN控制器MCP2510在ARM9内棱芯片AT91RM9200下驱动程序的设计为例,详细分析了Linux下CAN设备驱动程序的开发流程和设计技巧,并结合CAN总线技术的特殊性,设计了相关的重要数据结构和操作代码,详细阐述了驱动设计中的难点问题.最后简述了驱动程序的加载及测试方法.为Linux下CAN控制嚣驱动开发提供了重要技术支持.
【总页数】4页(P44-47)
【作者】陈程;陈楸
【作者单位】西北工业大学自动化学院,西安,710072;西北工业大学自动化学院,西安,710072
【正文语种】中文
【中图分类】TP336
【相关文献】
1.实时操作系统VxWorks环境下CAN控制器驱动程序的设计 [J], 谢火明;唐涛
2.嵌入式Linux下SPI总线驱动程序设计 [J], 孙帅;李传玺
3.嵌入式Linux下CAN控制器的驱动程序设计 [J], 陈祖爵;周明
4.Linux下PCI同步时钟卡的驱动程序设计 [J], 陈梦桐;魏丰;杨兵见
5.基于嵌入式Linux下的USB3.0驱动程序开发方法研究 [J], 杨军
因版权原因,仅展示原文概要,查看原文内容请购买。
Linux底层驱动开发技能大揭秘让你轻松闯关

Linux底层驱动开发技能大揭秘让你轻松闯关Linux操作系统的强大功能和广泛应用离不开底层驱动的支持。
底层驱动是连接硬件和操作系统的重要桥梁,它负责管理和控制硬件设备,使之能够与操作系统进行通信。
本文将揭示Linux底层驱动开发的技能和要点,帮助您轻松闯关。
一、Linux底层驱动开发概述Linux底层驱动开发是指在Linux操作系统中编写和调试驱动程序的过程。
驱动程序负责将硬件的特性和功能映射到操作系统的接口上,使得操作系统可以与硬件设备进行交互。
Linux底层驱动开发可以分为字符设备驱动和块设备驱动两大类。
字符设备驱动用于处理字符数据的输入和输出,例如键盘、鼠标等外围设备;而块设备驱动则用于管理基于块的存储设备,如硬盘、固态硬盘等。
二、Linux底层驱动开发的关键技能1.熟悉Linux内核和驱动模型Linux内核是操作系统的核心部分,驱动程序运行在内核空间中。
因此,熟悉Linux内核的架构和设计原理至关重要。
学习内核源码和驱动框架,了解各个子系统的工作原理和交互方式,对于驱动开发至关重要。
2.了解设备的硬件接口标准设备的硬件接口标准是用于与操作系统进行通信的重要标准。
如了解设备的寄存器结构、通信协议和数据传输方式等,能够更好地理解和操作设备。
3.掌握Linux驱动程序的编程技巧Linux驱动程序是以C语言为基础进行编写的,所以熟练掌握C语言的基本语法和常用函数对于驱动程序开发很重要。
此外,了解Linux内核提供的API函数、数据结构和编程风格,能够更好地编写高效、稳定的驱动程序。
4.调试和排错能力驱动程序开发过程中经常会遇到各种问题,如设备无法正常工作、性能瓶颈等。
因此,具备良好的调试和排错能力是驱动开发人员的必备技能。
掌握常用的调试工具和技巧,能够更快地解决问题。
三、Linux底层驱动开发的步骤和流程1.了解设备的工作原理和特性在开始开发驱动程序之前,需要对设备的工作原理和特性有所了解。
查阅设备的技术文档和规格说明书,了解设备的硬件接口、数据传输方式和寄存器等相关信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
/* IRQ specific to Error and status & can be use d for Message Object */ ndev>irq = platform_get_irq_byname(pdev, ”int0″); if (!ndev->irq) {
/?p=43 7/15
/?p=43
5/15
2015年7月28日
曾经的足迹——对Linux CAN驱动的理解(1) | riaos
clk_enable(priv->ick);
/* get the platform data */ /*获取平台内存资源*/ mem = platform_get_resource(pdev, IORESOU RCE_MEM, 0); if (!mem) { ret = -ENODEV; dev_err(&pdev->dev, ”No mem resourcen”); goto exit_free_clks; } /*申请I/O内存*/ if (!request_mem_region(mem>start, resource_size(mem), D_CAN_DRV_NAME)) { dev_err(&pdev->dev, ”resource unavailablen”); ret = -EBUSY;
2015年7月28日
曾经的足迹——对Linux CAN驱动的理解(1) | riaos
dev_err(&pdev->dev, ”No irq0 resourcen”); goto exit_iounmap; }
/* IRQ specific for Message Object */ priv>irq_obj = platform_get_irq_byname(pdev, ”in t1″); if (!priv->irq_obj) { dev_err(&pdev->dev, ”No irq1 resourcen”); goto exit_iounmap; }
/*获取时钟并使能*/ priv->ick = clk_get(&pdev->dev, pdata>ick_name); if (IS_ERR(priv->ick)) { dev_err(&pdev>dev, ”%s is not foundn”, pdata->ick_name); ret = -ENODEV; goto exit_free_fck; }
priv->base = addr; priv->can.clock.freq = clk_get_rate(priv->fck); priv->test_mode = pdata->test_mode_enable;
/?p=43
8/15
2015年7月28日
dev_info(&pdev>dev, ”%s device registered (irq=%d, irq_obj=% d)n”, D_CAN_DRV_NAME, ndev->irq, priv->irq_obj);
return 0;
/?p=43
9/15
2015年7月28日
/?p=43 3/15
2015年7月28日
曾经的足迹——对Linux CAN驱动的理解(1) | riaos
goto exit; } /* allocate the d_can device */ /*分配d_can设备,如can0、can1、…等*/ ndev = alloc_d_can_dev(pdata>num_of_msg_objs); if (!ndev) { ret = -ENOMEM; dev_err(&pdev>dev, ”alloc_d_can_dev failedn”); goto exit; } /*获取设备私有数据*/ priv = netdev_priv(ndev); /*获取时钟并使能*/ priv->fck = clk_get(&pdev->dev, pdata>fck_name);
首先分析d_can_platform.c文件,驱动运行时, 也是先从这里开始。首先是驱动入口函数: module_init(d_can_plat_init);
/?p=43 1/15
2015年7月28日
曾经的足迹——对Linux CAN驱动的理解(1) | riaos
2015年7月28日
曾经的足迹——对Linux CAN驱动的理解(1) | riaos
riaos
riaos
曾经的足迹——对Linux CAN驱动的理解 (1)
September 25, 2013 Uncategorized
在Ti的AM335X系列Cortext-A8芯片中,CAN模块 采用D_CAN结构,实质即两路CAN接口。 在此分享一下对基于AM335X的Linux CAN驱动源 码的理解。下面来分析它的驱动源码及其工作 方式。 在Linux内核源码中,CAN设备驱动文件如下: drivers/net/can/d_can/d_can_platform.c drivers/net/can/d_can/d_can.c drivers/net/can/d_can/d_can.h
/?p=43
4/15
2015年7月28日
曾经的足迹——对Linux CAN驱动的理解(1) | riaos
if (IS_ERR(priv->fck)) { dev_err(&pdev>dev, ”%s is not foundn”, pdata->fck_name); ret = -ENODEV; goto exit_free_ndev; } clk_enable(priv->fck);
return register_candev(dev); }
/?p=43 11/15
2015年7月28日
曾经的足迹——对Linux CAN驱动的理解(1) | riaos
EXPORT_SYMBOL_GPL(register_d_can_dev);
在register_d_can_dev()函数中填充其网络设备 操作函数成员dev>netdev_ops= &d_can_netdev_ops。 static const struct net_device_ops d_can_netdev_o ps = { .ndo_open = d_can_open, .ndo_stop = d_can_close, .ndo_start_xmit = d_can_start_xmit, };
曾经的足迹——对Linux CAN驱动的理解(1) | riaos
platform_set_drvdata(pdev, ndev); SET_NETDEV_DEV(ndev, &pdev->dev); /*注册CAN网络设备*/ ret = register_d_can_dev(ndev); if (ret) { dev_err(&pdev>dev, ”registering %s failed (err=%d)n”, D_CAN_DRV_NAME, ret); goto exit_free_device; }
/?p=43 6/15
2015年7月28日
曾经的足迹——对Linux CAN驱动的理解(1) | riaos
goto exit_free_clks; } /*在内核中访问 I/O 内存之前,需首先使 用 ioremap()函数将设备所处的物理地址映 射到虚拟地址*/ addr = ioremap(mem>start, resource_size(mem)); if (!addr) { dev_err(&pdev->dev, ”ioremap failedn”); ret = -ENOMEM; goto exit_release_mem; }
/?p=43 10/15
2015年7月28日
曾经的足迹——对Linux CAN驱动的理解(1) | riaos
dev_err(&pdev->dev, ”probe failedn”);
return ret; }
在d_can_plat_probe()函数中调 用register_d_can_dev()注册CAN为网络设备。函 数register_d_can_dev()在文件 drivers/net/can/d_can/d_can.c中。通过 EXPORT_SYMBOL_GPL宏导出。 int register_d_can_dev(struct net_device *dev) { /* we support local echo */ dev->flags |= IFF_ECHO; dev->netdev_ops = &d_can_netdev_ops;
static int __init d_can_plat_init(void) { printk(KERN_INFO D_CAN_DRV_DESC ”n”); return platform_driver_register(&d_can_plat_ driver); } 在驱动入口函数d_can_plat_init()中,使 用platform_driver_register(&d_can_plat_driver)将 结构体变量d_can_plat_driver注册为平台驱 动。 static struct platform_driver d_can_plat_driver = { .driver = { .name = D_CAN_DRV_NAME, .owner = THIS_MODULE, }, .probe = d_can_plat_probe, .remove = __devexit_p(d_can_plat_remove), };