嵌入式环境下大数据量像素地图配准
嵌入式系统中的视频处理与图像识别技术

嵌入式系统中的视频处理与图像识别技术嵌入式系统中的视频处理与图像识别技术是当前技术领域的热门研究方向,它在多个领域中得到了广泛的应用,包括智能监控、自动驾驶、人机交互等。
视频处理与图像识别的重要性在于将实际场景中的图像或视频通过嵌入式系统进行实时分析和处理,从而实现更智能化的决策和操作。
嵌入式系统中的视频处理技术主要包括视频采集、视频压缩、视频编码和视频解码等环节。
首先,视频采集是指通过摄像头或摄像机等设备获取现实场景的图像或视频,采集到的原始数据通常是以模拟信号的形式存在。
为了进一步处理这些数据,需要将其进行模数转换,转换成数字信号以便于嵌入式系统对其进行处理。
接下来,为了减小数据量和提高传输效率,视频压缩技术被广泛应用。
常用的视频压缩算法包括H.264、H.265等,它们通过对视频信号进行编码压缩,以减小数据量的同时保持较高的图像质量。
视频编码和解码技术是实现视频压缩与解压缩的关键环节,它们通过对视频信号进行编码和解码操作,实现了视频的压缩存储和传输。
图像识别技术是嵌入式系统中另一项重要的技术。
图像识别主要通过对图像进行特征提取和图像匹配等算法操作,实现对图像内容的分析和识别。
其中,图像特征提取是图像识别的关键步骤之一,它通过提取图像中的颜色、纹理、形状等特征信息,进行图像内容的描述和表达。
常用的图像特征提取算法包括SIFT、SURF、HOG等,它们能够从图像中提取出具有相对唯一性和稳定性的特征向量。
通过将这些特征向量与事先训练好的模型进行匹配,就可以实现对图像内容的快速识别。
嵌入式系统中的视频处理与图像识别技术的应用十分广泛。
在智能监控领域,通过嵌入式系统对视频进行实时处理和分析,可以实现对安全事件的自动检测和报警。
例如,通过对监控摄像头获取的视频进行人脸识别,可以及时识别出可疑人员,并向相关人员发出警报。
在自动驾驶领域,嵌入式系统能够通过对摄像头获取的道路图像进行处理和分析,实现车道识别、障碍物检测等功能,为自动驾驶车辆提供决策支持。
嵌入式系统中的图像识别与目标跟踪技术研究
嵌入式系统中的图像识别与目标跟踪技术研究嵌入式系统中的图像识别与目标跟踪技术是现代智能系统中的重要组成部分。
随着嵌入式系统的快速发展和小型化趋势,图像识别与目标跟踪的应用领域也越来越广泛。
本文将对嵌入式系统中的图像识别与目标跟踪技术进行深入探讨,并介绍其在实际应用中的一些应用案例和挑战。
嵌入式系统中的图像识别技术主要借助计算机视觉和机器学习等技术手段,通过对输入图像进行分析和处理,来识别图像中的对象和场景。
传统的图像识别方法主要依赖于手工设计的特征提取算法,例如SIFT(尺度不变特征转换)、HOG(方向梯度直方图)等。
但是,这些方法往往对光照、视角等因素非常敏感,难以适应复杂多变的环境。
近年来,随着深度学习的兴起,基于卷积神经网络(CNN)的图像识别方法取得了显著的成果。
CNN能够学习到有效的特征表达,并通过端到端的训练方式优化模型的准确性和鲁棒性。
这些技术已经广泛应用于人脸识别、物体检测和图像分类等领域。
同时,图像识别技术与目标跟踪技术密切相关。
目标跟踪技术是指在连续的图像序列中,通过对目标的运动轨迹进行建模和预测,跟踪目标的位置和形态变化。
嵌入式系统中的目标跟踪面临着实时性、鲁棒性和计算资源有限等挑战。
近年来,随着深度学习的发展,基于深度神经网络的目标跟踪方法取得了巨大的突破。
通过在神经网络中引入长短期记忆(LSTM)模块,能够有效地建模目标的运动和形态变化,提高目标跟踪的精度和鲁棒性。
嵌入式系统中的图像识别与目标跟踪技术在许多领域中得到了广泛应用。
在智能监控系统中,通过图像识别和目标跟踪能够实现人脸识别和行为分析等功能,提高安全防护能力。
在自动驾驶领域,通过图像识别和目标跟踪能够实现实时道路和交通标志的识别,并进行车辆的行为预测和轨迹规划。
在智能手机和可穿戴设备中,图像识别和目标跟踪技术可以实现手势识别、人脸解锁等功能,提供更加便捷和安全的用户体验。
然而,嵌入式系统中的图像识别与目标跟踪技术也面临一些挑战。
嵌入式GIS地图快速显示方法的应用
嵌入式GIS地图快速显示方法的应用1 问题描述地理信息系统(Geographic Information System, 简称GIS)产品被广泛应用于交通、测绘、环境、国防、航空航天等与国民经济乃至国家命脉相关的重要领域,带来了显著的经济和社会效益。
近年来随着嵌入式技术的迅猛发展,GIS 技术也逐步应用于以手机、掌上电脑为代表的移动终端,使得嵌入式GIS 成为当今GIS 研究领域的一个重要趋势。
当前地图数据量巨大,要求地图刷新频率高、实时性强,普通桌面系统的地图显示方法很难适用于存储器容量小、处理器性能低的嵌入式系统,提高地图的显示效率成为嵌入式GIS产品研发的首要问题。
矢量地图拥有数据结构紧凑,冗余度低;图形显示质量好,精度高,不失真等优点,目前已被广泛应用与嵌入式移动终端。
故设想利用针对矢量电子地图的地图显示数学模型,设计基于LOD的逐层分块的地图数据组织结构,并以此为基础建立网格索引,通过此方法提高地图显示速度。
2 需要解决的问题(1)地图的数据组织结构是影响地图显示速度的核心因素。
因此,如何对矢量地图显示数学模型进行分析研究,合理组织地图数据是首要问题。
由于电子地图的数据量较大,嵌入式设备的地图数据一般会存放在外存储器中,系统显示地图时需要先将地图数据读入内存,再由地图绘制程序解析内存中的数据,将地图显示在屏幕上。
假设某矢量地图数据占用物理存储空间为D, 数据读入内存速度为V1,显示速度为V2, 数据读取准备时间为f (n), 用户可等待时间为T, 嵌入式设备内存容量为R, 则有以下公式成立:嵌入式设备内存容量一定,若V1, V2, T 为常数,则必须减少D 和f (n)才能满足数据显示和处理的要求,提高地图的显示速度。
通过对地图显示数学模型的分析可以发现,要使地图的显示速度达到最快,需要解决两个问题:一是尽量减少地图非屏幕显示区域的数据量,即根据显示范围限制读入的数据量;二是要能以最快的速度从庞大的地图数据中找到当前显示范围所涉及的相关数据。
嵌入式系统中的图像处理与视频编解码技术研究

嵌入式系统中的图像处理与视频编解码技术研究摘要:随着科技的不断发展和进步,嵌入式系统在各个领域的应用越发广泛。
在嵌入式系统中,图像处理和视频编解码技术是至关重要的部分。
本文将对嵌入式系统中图像处理和视频编解码技术进行深入研究与探讨,分析其原理、应用和发展趋势。
一、引言嵌入式系统是指嵌入到其他设备中的计算设备,具有高度集成化、低功耗、小体积等特点。
图像处理和视频编解码技术是嵌入式系统中的核心技术,广泛应用于智能手机、监控摄像头、机器人等领域。
二、图像处理技术1. 图像采集与传感器在嵌入式系统中,图像采集是图像处理的基础。
传感器的选择和性能对图像质量和处理效果有重要影响。
常用的传感器包括CMOS和CCD。
CMOS传感器具有低功耗、低成本和集成度高的特点,逐渐取代了CCD传感器。
2. 图像增强与处理算法图像增强是指通过各种算法使图像具有更好的视觉效果和清晰度。
包括去噪、锐化、增加对比度等处理。
最常用的算法包括直方图均衡化、小波变换、滤波器等。
3. 图像识别与分析图像识别和分析是图像处理的重要应用之一。
借助机器学习和人工智能等技术,实现人脸识别、物体检测、字符识别等功能。
图像识别技术可以广泛应用于安防监控、智能交通等领域。
三、视频编解码技术1. 视频编码视频编码是将视频信号转换为数字信号的过程。
常用的视频编码标准有H.264、H.265、MPEG-2等。
视频编码算法通过对视频序列进行压缩,减少数据量,提高传输效率。
2. 视频解码视频解码是将压缩的视频信号转换为原始的视频信号的过程。
视频解码器使用特定的解码算法将压缩的码流还原为原始的视频数据,以便显示或进一步处理。
3. 视频传输与存储在嵌入式系统中,视频流的传输和存储也是一个关键问题。
通过网络传输视频需要考虑带宽、延迟等问题;在嵌入式设备中存储视频需要考虑存储容量和读写速度等因素。
四、发展趋势1. 高清与超高清视频处理随着高清和超高清视频的普及,嵌入式系统中的图像处理和视频编解码技术也需要不断提升,以满足高清视频处理的需求。
导航设备嵌入式软件的地图配准算法
导航设备嵌入式软件的地图配准算法导航设备在现代交通中扮演着至关重要的角色,而地图配准算法是导航设备嵌入式软件中的一个重要组成部分。
地图配准算法通过对导航设备所使用的地图数据进行处理,使得设备能够准确地将所处的位置与地图上的相应位置对应起来,并提供精确的导航指引。
本文将就导航设备嵌入式软件的地图配准算法进行详细探讨。
地图配准算法的主要任务是将导航设备所使用的地图数据与真实世界中的地理位置相匹配。
这样,当用户使用导航设备时,设备可以根据用户的实际位置提供相应的导航指引。
为了实现这一目标,地图配准算法通常需要解决以下几个关键问题:首先,地图配准算法需要考虑导航设备所使用的地图数据的精度和准确性。
地图数据是由不同的数据源收集而来的,可能存在误差和偏差。
因此,算法需要对地图数据进行处理和纠正,以提高数据的准确性。
其次,地图配准算法需要考虑GPS(全球定位系统)数据的精度和可靠性。
GPS是导航设备定位的主要手段,但是由于信号受到建筑物和地形的阻挡,可能存在定位误差。
因此,算法需要结合地图数据和GPS数据,对GPS定位进行校正,以提高定位的准确性。
另外,地图配准算法需要考虑导航设备所使用的传感器数据的精度和可靠性。
导航设备通常会使用加速度计、陀螺仪等传感器来获取设备的运动信息,以便更准确地判断设备的位置。
然而,传感器数据也可能受到噪声和干扰的影响,因此,算法需要对传感器数据进行滤波和校正,以提高位置判断的准确性。
为了解决以上问题,地图配准算法通常会采用多种技术和方法。
其中,最常用的方法包括特征匹配、地标识别和地图匹配。
特征匹配是指将地图数据中的关键特征点与实际环境中的特征点进行匹配,从而确定设备的位置。
地标识别是指通过识别特定的地理标志物,如建筑物、道路或山脉等,来确定设备的位置。
地图匹配是指将设备的移动轨迹与地图数据进行匹配,从而确定设备的位置。
特征匹配是地图配准算法中最常用的方法之一。
该方法利用图像处理技术从地图数据和设备的实时图像中提取特征点,并通过对特征点进行匹配来确定设备的位置。
嵌入式系统中嵌入式图像处理技术的实现

嵌入式系统中嵌入式图像处理技术的实现随着科技的不断发展,嵌入式系统在生产制造、智能家居、智能交通等诸多领域中已经得到广泛运用,其中嵌入式图像处理技术更是成为了一个热门话题。
在很多场合下,嵌入式系统需要实时采集、处理和传输图像信息,这就需要嵌入式图像处理技术来完成。
本文将从嵌入式图像处理技术的实现角度详细探讨其工作原理、发展历程和未来趋势。
一、嵌入式图像处理技术的工作原理所谓嵌入式图像处理技术,就是将图像处理算法与硬件平台结合,实现图像采集、处理和输出的过程。
为了达到嵌入式处理的要求,嵌入式图像处理系统必须高度集成、低功耗、低成本、高速度和稳定性强。
其基本流程如下:1. 图像采集:将光线转换成电子信号,经过A/D转换后得到数字图像。
2. 图像预处理:包括图像去噪、增强、分割、特征提取和匹配等处理过程,使得图像信息更加可靠和准确。
3. 图像编码:采用JPEG、MPEG等压缩算法将原始图像数据进行压缩和编码,降低存储和传输的数据量。
4. 图像解码:将经过编码后的图像数据进行解密和还原,以得到与原始图像相同的格式和内容。
5. 图像输出:将处理后的图像信息通过显示器、投影仪、打印机等设备输出。
二、嵌入式图像处理技术的发展历程嵌入式图像处理技术的应用范围是非常广泛的,从智能家居、智能交通到数字医疗、安防监控等领域,都需要用到这项技术。
其发展历程主要经历了以下几个阶段:1. 初期阶段:20世纪80年代后期,以DSP为代表的数字信号处理器开始出现,让人们第一次看到了嵌入式图像处理的潜力和前景。
在这个阶段,处理器和算法都比较简单,用于处理的图像也比较单一,主要应用在军事、航空、航天等领域。
2. 隆盛阶段:随着计算机的性能越来越强大,嵌入式图像处理技术逐渐开始被商业化运用。
在20世纪90年代,出现了ARM、FPGA等处理器,也涌现了一批像素处理器、彩色处理器和数字摄像机等处理设备,图像处理算法也变得更为复杂和智能化。
MapGIS中影像图的镶嵌配准、矢量化图的误差校正
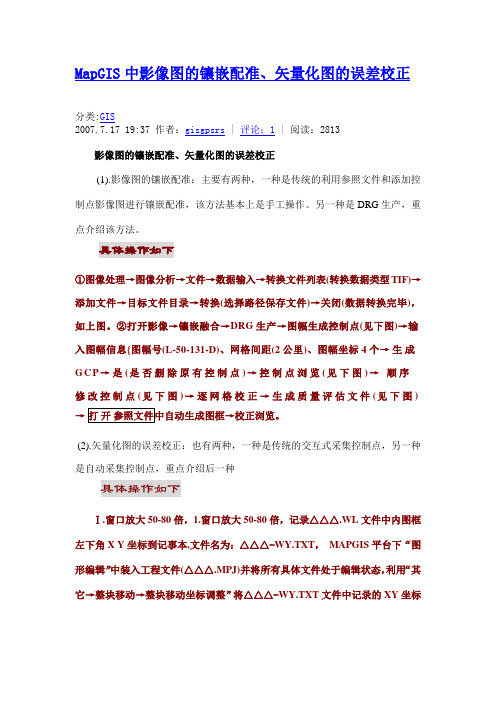
MapGIS中影像图的镶嵌配准、矢量化图的误差校正分类:GIS2007.7.17 19:37 作者:gisgpsrs | 评论:1 | 阅读:2813影像图的镶嵌配准、矢量化图的误差校正(1).影像图的镶嵌配准:主要有两种,一种是传统的利用参照文件和添加控制点影像图进行镶嵌配准,该方法基本上是手工操作。
另一种是DRG生产,重点介绍该方法。
具体操作如下①图像处理→图像分析→文件→数据输入→转换文件列表(转换数据类型TIF)→添加文件→目标文件目录→转换(选择路径保存文件)→关闭(数据转换完毕),如上图。
②打开影像→镶嵌融合→DRG生产→图幅生成控制点(见下图)→输入图幅信息{图幅号(L-50-131-D)、网格间距(2公里)、图幅坐标4个→生成G C P→是(是否删除原有控制点)→控制点浏览(见下图)→顺序修改控制点(见下图)→逐网格校正→生成质量评估文件(见下图)→(2).矢量化图的误差校正:也有两种,一种是传统的交互式采集控制点,另一种是自动采集控制点,重点介绍后一种具体操作如下Ⅰ.窗口放大50-80倍,1.窗口放大50-80倍,记录△△△.WL文件中内图框左下角X Y坐标到记事本,文件名为:△△△-WY.TXT,MAPGIS平台下“图形编辑”中装入工程文件(△△△.MPJ)并将所有具体文件处于编辑状态,利用“其它→整块移动→整块移动坐标调整”将△△△-WY.TXT文件中记录的XY坐标负数键入对话框中,使工程文件(△△△.MPJ)中所有具体实际矢量化文件移至理论框所在处,整饰部分只做平移,不进行校正。
Ⅱ.剥离方里网:分别打开实际矢量化文件及理论框文件,分别首先将内图框中包括内图框及所有网格线改到一个单独图层,点击“图层→关所有层”,点击“图层→改层开关→改线”,点击“更新窗口”,再点击“图层→改当前层”到单独图层,然后点击“图层→存当前层→保存线”,其文件名为:△△△-….wl。
Ⅲ.校正:由MAPGIS主选单中→误差校正,双击弹出画面(MAPGIS误差校正系统),点击“文件→打开文件”打开文件“实际矢量化的含内图框的网格文件与理论的含内图框的网格文件”。
嵌入式系统中的图形处理

嵌入式系统中的图形处理在嵌入式系统中,图形处理是一项重要且常见的任务。
嵌入式系统常用于诸如智能手机、平板电脑、车载导航系统等设备中,这些设备通常需要处理图像、显示界面和实时渲染等图形相关操作。
因此,有效而高效的图形处理在嵌入式系统中具有至关重要的地位。
一、图形处理在嵌入式系统中的作用嵌入式系统中的图形处理主要有以下几个方面的作用:1. 图像处理与识别:嵌入式系统常常需要对图像进行处理和识别,例如人脸识别、指纹识别等。
图像处理算法可以通过检测边缘、特征提取和图像比对等方法,对图像进行分析和处理。
2. 显示界面和交互设计:嵌入式系统需要显示用户界面,提供直观的操作方式。
图形处理可以通过图像渲染、动画效果等方式,使界面更加美观和用户友好。
3. 实时渲染和游戏开发:许多嵌入式设备支持实时渲染和游戏开发。
图形处理单位可以实时处理并渲染图形数据,使游戏画面更加逼真和流畅。
4. 视频编解码与压缩:在嵌入式系统中,视频编解码是一项重要的图形处理任务。
通过图形处理单元,可以对视频进行编码、解码和压缩,以适应有限的存储和带宽资源。
二、嵌入式系统中常见的图形处理技术以下是嵌入式系统中常见的图形处理技术:1. 光栅化:光栅化是将矢量图形转换为像素表示的关键过程。
通过将矢量图形进行光栅化,可以更好地适配嵌入式系统的显示设备,并实现图像的高质量显示。
2. 着色和阴影处理:着色和阴影处理是实时渲染中的重要环节。
通过对物体表面的光照和色彩进行模拟和计算,可以实现图像更加真实和细腻的渲染效果。
3. 纹理映射:纹理映射是将图像映射到物体表面的技术。
通过纹理映射,可以使图形更加富有质感和真实感,提高图像的细节和逼真度。
4. 图像算法和优化:为了提高图形处理的效率和性能,嵌入式系统中需要采用一些图像算法和优化技术。
例如,利用并行计算、GPU加速等方式,可以加快图像处理的速度和响应时间。
三、嵌入式系统中的图形处理优化为了在嵌入式系统中实现高效的图形处理,我们可以采取以下一些优化策略:1. 硬件和软件协同设计:在系统设计阶段,应根据具体应用需求选择适合的图形处理硬件和软件方案。
嵌入式系统中的实时大数据处理技术

嵌入式系统中的实时大数据处理技术第一章嵌入式系统概述嵌入式系统是一种集成了硬件和软件的计算机系统,通常被嵌入到另一个设备中,以执行特定的功能。
与通用计算机不同,嵌入式系统通常处理实时数据,并且有较小的硬件复杂度和存储容量限制。
嵌入式系统的广泛使用包括汽车、交通信号、医疗设备、智能家居、导航设备等。
第二章实时大数据处理技术概述实时大数据处理技术是一种处理大量实时数据的技术,用于从传感器、仪器、网络等数据源中采集数据,并基于数据生成对实际情况进行响应决策所需的关键指标。
实时大数据处理技术又称之为实时数据分析,它涉及到数据收集、数据采集、数据处理和数据存储等方面,是嵌入式系统中最关键的部分之一。
第三章嵌入式系统中的实时大数据处理技术嵌入式设备通常需要在受到外部条件的影响下保持高效性和准确性。
为了实现这些目标,实时大数据处理技术被广泛应用于嵌入式系统中。
这种技术的主要优势在于它可以实现对多个来源数据的实时分析和处理,从而使设备能够采取适当的行动。
以下是一些嵌入式系统中的实时大数据处理技术:1. 数据采集在嵌入式系统中,传感器和检测器等外部设备会产生大量数据。
数据采集技术的作用是将这些数据从外部设备中捕获并发送到处理单元,以进行分析和处理。
常用的采集技术包括I2C、SPI和UART等。
它们负责抓取数据并将其传递给处理单元。
2. 数据分析数据分析是嵌入式系统中实时大数据处理的核心。
它通过适当的算法来分析数据,并从这些数据中提取关键信息和指标。
为了保证处理时间的准确性和效率,这些分析算法通常都是高度优化的。
最常用的算法包括滤波、聚类、分类和预测等。
3. 数据存储嵌入式系统中的数据存储技术旨在确保所收集的数据安全、可靠和可访问。
为防止数据丢失或损坏,通常会将数据保存在非易失性存储器中。
大多数嵌入式系统使用可能性很小、但性能很低的闪存存储器来保存数据。
此外,使用云存储也是一种流行的选择。
4. 数据传输传输数据是嵌入式系统中实现实时处理的关键部分。
嵌入式环境下大数据量像素地图配准
的方法,并利 用两幅图像 的经纬 度或大地 坐标 与新 图像像素 坐标的对 应关系实现标 准块的无缝拼接 ,最终达到对整 幅大
数据量栅格地 图的校正 。
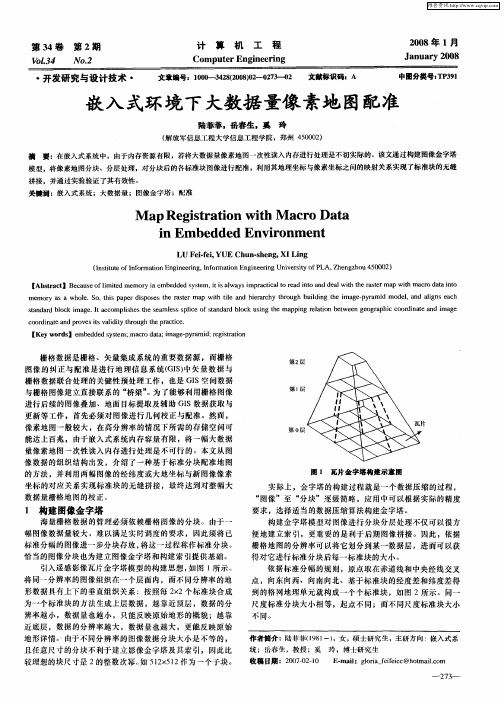
图 1 瓦片金字塔构建示意 图
实际上 ,金字塔的构建过程就是一个数据压 缩的过程 , “ 图像”至 “ 分块”逐级 简略 ,应用中可 以根据实 际的精度 要求 ,选择 适当的数 据压 缩算法构建金 字塔 。
me r s a wh l .S t i a e i p s s t e r se p wi ie a d h e a c y t r u h b id n e i g — y a d mo e ,a d a i n a h mo y a o e o, s p p r d s o e a t r ma t tl n i r r h o g u l i g t ma e p r mi d l n lg s e c h h h h h sa d d bl c ma e I c o p ih s t e s a l s p ie o t n a d b o k u i g t e m a p n e a i n b t e e g a h c c o d n t d i a e t a o k i g . ta c m l e e m e ss lc fs a d l c sn p i g r l to e we n g o r p i o r i a e a m g n r s h r h n
c o d n t n r v si a i iy t r u h t e p a tc . o r i a e a d p o e t v l t h o g r c i e s d h
.
[ ywo d le e d dss m; cod t;ma ep rmi;e irt n Ke rs mb d e t mar aa i g—ya d rgs ai ye t o
如何利用测绘技术进行遥感影像配准与镶嵌

如何利用测绘技术进行遥感影像配准与镶嵌在当今高科技快速发展的时代,遥感技术的广泛应用为地理学、环境科学、城市规划和军事等领域提供了巨大的帮助。
然而,由于遥感影像获取的特殊性质,它们通常需要进行配准和镶嵌才能更好地发挥作用。
本文将介绍如何利用测绘技术进行遥感影像配准与镶嵌,以提高影像分析的准确性和可靠性。
首先,我们需要明确什么是遥感影像配准与镶嵌。
遥感影像配准是指将多幅来自不同传感器或不同时间的遥感影像准确地对齐在同一坐标系下,以实现精确的空间比较和分析。
而遥感影像镶嵌则是指将多幅配准后的遥感影像拼接在一起,以形成连续、无缝的地表覆盖图像。
配准和镶嵌是遥感影像处理的重要步骤,能够提供全面的地表信息,帮助我们更好地了解和研究地球。
在进行遥感影像配准与镶嵌之前,我们首先需要了解影像几何校正。
几何校正是指对遥感影像进行外方位元素的校正,以实现影像的几何精度改进。
测绘技术在影像几何校正中发挥着重要作用,通过对影像进行数字摄影测量,定位和辅助数据获取,能够提供高精度的影像几何校正结果。
在几何校正过程中,通常需要利用控制点进行像控定位和坐标转换,从而实现影像的精确定位。
在影像配准方面,测绘技术可以通过特征点匹配、相似性变换和最小二乘法等方法,实现多幅遥感影像之间的准确对齐。
特征点匹配是一种常用的配准方法,它通过提取影像中的特征点,并将其与参考影像中的特征点进行匹配,从而实现影像的精确配准。
相似性变换是一种用于描述两幅影像之间几何变换关系的数学模型,可以根据特征点的位置和变换参数,对待配准影像进行几何变换,从而实现影像的精确对齐。
最小二乘法是一种常用的配准评价方法,通过最小化配准过程中特征点之间的残差,确定最优的配准变换参数,以实现影像的精确对齐。
在影像镶嵌方面,测绘技术可以通过边缘匹配、重叠区域调整和无缝融合等方法,实现多幅配准影像的无缝拼接。
边缘匹配是一种常用的镶嵌方法,它通过提取影像边缘特征,并将其与相邻影像的边缘特征进行匹配,从而实现影像的无缝拼接。
如何利用测绘技术进行遥感影像配准与镶嵌
如何利用测绘技术进行遥感影像配准与镶嵌遥感影像配准与镶嵌是数字地球技术中的重要步骤,它能够将多个不同时刻、不同传感器采集的遥感影像融合在一起,提供全面、全时段的地理信息。
而测绘技术在这个过程中发挥着关键的作用。
本文将介绍如何利用测绘技术进行遥感影像配准与镶嵌,以及其在各个应用领域的意义和挑战。
一、遥感影像配准遥感影像配准是指将多个遥感影像与参考图像进行对齐,使它们在同一坐标系下的方法。
测绘技术在遥感影像配准中的主要任务是确定影像的姿态和位置,并保持几何一致性。
1.1 影像预处理在进行影像配准之前,需要对原始遥感影像进行预处理。
测绘技术可以辅助进行影像增强、去噪和边缘检测等操作,以提高影像质量和配准精度。
1.2 特征提取特征提取是遥感影像配准的关键环节。
测绘技术可以使用不同的特征提取算法,例如SIFT(尺度不变特征变换)和SURF(加速稳健特征)等,来检测影像中的关键点和描述子。
1.3 相似性度量在特征提取之后,需要计算不同影像之间的相似性度量,以确定它们之间的几何变换关系。
测绘技术可以采用不同的相似性度量方法,例如均方差、互信息和归一化相关系数等来评估影像之间的匹配程度。
1.4 姿态估计基于相似性度量,可以使用测绘技术进行影像的姿态估计。
姿态估计是确定影像的旋转、平移、缩放和扭曲等变换参数的过程,以实现影像的几何对齐。
1.5 像素插值最后,需要进行像素插值,以填充配准后影像中的空白部分。
测绘技术可以使用插值算法,如双线性插值和最近邻插值等,来实现对影像的空间重采样,保持像素间的连续性。
二、遥感影像镶嵌遥感影像镶嵌是指将配准后的多个遥感影像进行拼接,以生成全景影像或时序影像。
测绘技术在遥感影像镶嵌中的主要任务是处理影像之间的色彩差异和边缘连接问题。
2.1 影像融合影像融合是将多个配准后的遥感影像进行融合的过程,以生成高质量的合成影像。
测绘技术可以使用多种影像融合算法,例如基于像素的融合和基于特征的融合,来实现影像的颜色平衡和细节增强。
如何进行测绘技术的地图配准

如何进行测绘技术的地图配准测绘技术是一门以获取地理、地貌、水系等信息为目的的科学技术。
地图配准是测绘技术中的重要环节,它是将不同数据源或者不同时间、尺度的地图进行对齐,使得它们在同一个坐标系统下能够互相重叠。
地图配准的准确度直接关系到地图的可用性和应用的效果。
一、测绘技术的地图配准的重要性地图配准是地图的基础工作,它能够提高地图的精度和一致性。
在实际的测绘工作中,由于各种原因,经常会出现采集的地图数据和现实情况之间存在差异的情况。
通过进行地图配准,可以将不同来源的地图数据进行融合,排除误差,提高地图的精度。
此外,地图配准还能够实现不同地图之间的对比和分析,为地理信息系统的建设和应用提供可靠的数据基础。
二、地图配准的常用方法地图配准的方法主要可以分为基于几何变换的配准和基于控制点的配准两种。
1. 基于几何变换的配准方法基于几何变换的配准方法是指通过对地图进行旋转、平移、缩放等几何变换操作,使得多幅地图数据能够在同一个坐标系统下对齐。
常见的几何变换包括相似变换、仿射变换和投影变换等。
相似变换适用于同一地区的地图配准,仿射变换适用于地图间有一定形变的情况,而投影变换适用于将地图数据从一个坐标系转换到另一个坐标系的情况。
2. 基于控制点的配准方法基于控制点的配准方法是指通过在地图上选择一些已知坐标的地点作为控制点,然后通过计算这些控制点在不同地图上的坐标之间的差异,推算出地图之间的坐标转换参数。
这种方法在地图边界比较清晰的情况下较为常用。
控制点的选择要多样化,既可以选择地物边角,也可以选择地物中心等特征点。
三、地图配准的注意事项在进行地图配准时,需要注意以下几个方面:1. 数据的准备地图配准的前提是具备需要配准的地图数据。
因此,在开始配准之前,需要对地图数据进行预处理,包括数据格式的转换、数据质量的检验和数据的筛选等。
只有具备了合适的地图数据,才能进行后续的地图配准操作。
2. 控制点的选择选择合适的控制点是地图配准的重要环节。
基于机器学习的图像嵌入式处理与图像识别算法优化
基于机器学习的图像嵌入式处理与图像识别算法优化图像处理是一项非常重要且广泛应用的技术,其中基于机器学习的图像嵌入式处理与图像识别算法优化是近年来研究的热门方向。
本文将从图像嵌入式处理的概念、机器学习在图像处理中的应用以及图像识别算法优化等几个方面进行探讨和分析。
首先,图像嵌入式处理是指将图像处理算法与专门的硬件平台相结合,实现在嵌入式系统中高效地处理图像的技术。
传统的图像处理算法通常在计算能力较强的计算机上运行,但随着物联网和嵌入式系统的发展,对于图像处理的需求也越来越高。
嵌入式系统具有小型化、低功耗和高性能等特点,能够满足实时性、远程性和无线传输等方面的要求。
图像嵌入式处理的应用场景包括但不限于智能监控、无人驾驶、机器人视觉等。
其次,机器学习作为一种强大的数据处理和模式识别工具,在图像处理中有着广泛的应用。
机器学习算法可以自动地从大量的图像数据中学习特征、提取规律,并将所学到的知识应用于图像处理任务中。
例如,卷积神经网络(CNN)是一种经典的机器学习算法,在图像分类、目标检测等任务中取得了显著的成果。
通过训练大量图像数据,CNN可以从中学习到特征的表达方式,并在未知图像中进行准确的分类。
此外,支持向量机(SVM)、随机森林(Random Forest)等算法也被广泛用于图像处理中的分类、分割和检测等任务中。
然而,机器学习在图像处理中的应用也面临着一些挑战,如算法的复杂度、模型的泛化能力和硬件资源的限制等。
因此,对图像识别算法进行优化是非常重要的。
一方面,优化算法可以提高图像处理的速度和效果;另一方面,还可以减少硬件资源的使用,使得图像处理能够更好地应用于嵌入式系统。
图像识别算法优化的方法可以包括但不限于模型剪枝和量化、网络结构优化、硬件加速等。
模型剪枝和量化可以通过去除冗余的权重和减少模型参数的表示位数来减小模型的大小和计算量。
网络结构优化则通过改进网络的架构和参数设置来提高图像识别的性能。
硬件加速可以利用专门的硬件加速器(如GPU、FPGA等)来提高图像处理的速度和效率。
嵌入式系统中的嵌入式图像处理算法设计
嵌入式系统中的嵌入式图像处理算法设计嵌入式系统是一种特殊的计算机系统,其主要设计目的是为了执行特定的任务并具有小型、节能、高效的特性。
在这样的系统中,嵌入式图像处理算法设计具有重要的意义。
本文将探讨嵌入式系统中的嵌入式图像处理算法设计的关键要素和挑战,并提出一种基于该系统的可行算法设计方案。
图像处理是指通过对数字图像的分析、处理和增强来提取其中的有用信息。
在嵌入式系统中,图像处理算法的设计主要面临以下挑战:1. 资源限制:嵌入式系统通常具有有限的资源,如处理器性能、内存容量和存储空间。
因此,图像处理算法设计必须考虑如何在有限的资源下实现高效的计算。
2. 实时性要求:某些应用场景对实时性要求很高,如实时视频监控和无人驾驶等。
嵌入式图像处理算法设计必须能够在有限的时间内处理图像并给出响应。
3. 低功耗:嵌入式系统通常工作在电池供电环境下,因此图像处理算法设计需要尽可能地降低功耗,以延长系统的续航时间。
为了解决这些挑战,嵌入式图像处理算法设计的关键要素包括算法选择、优化和硬件加速等。
首先,选择合适的算法是嵌入式图像处理的关键。
在资源有限的情况下,算法必须具有高效的计算复杂度,并且能够在保证图像质量的前提下实现最佳的处理效果。
常用的图像处理算法包括边缘检测、图像增强、图像分割和目标识别等。
在进行算法选择时,需要根据具体的应用场景和需求进行权衡和取舍。
其次,算法的优化对于嵌入式系统来说至关重要。
这包括算法的并行化、向量化和采用专门设计的数据结构等。
并行化和向量化可以充分利用嵌入式处理器的多核和SIMD(单指令多数据流)能力,提高算法的运行效率。
另外,使用专门设计的数据结构可以减少内存访问次数,提高存储器的利用率。
最后,硬件加速是一种常用的方法,可以进一步提高嵌入式图像处理算法的性能。
利用FPGA(现场可编程门阵列)或ASIC(专用集成电路)等硬件加速器,可以将图像处理算法的计算过程通过硬件实现,减轻主处理器的负担,加快图像处理速度。
嵌入式Linux系统中实现高质量图片解码和显示的方法
嵌入式Linux系统中实现高质量图片解码和显示的方法在嵌入式Linux系统中实现高质量图片解码和显示是一个重要的技术挑战。
本文将介绍一种方法,通过优化解码算法、选择适当的解码器和采用适配硬件加速等措施来实现高质量的图片解码和显示。
一、优化解码算法优化解码算法是提高解码质量的基础。
通过改进解码算法,可以减少解码过程中的失真和损失,从而提高图片的清晰度和细节表现。
以下是一些常用的优化解码算法:1. 空间域解码算法:通过对图像进行去噪、锐化等处理,可以提高解码后图像的清晰度。
2. 频域解码算法:通过对图像的频域特征进行处理,如傅里叶变换、小波变换等,可以提高解码后图像的细节表现和颜色还原能力。
3. 矢量量化解码算法:通过将图像划分成不同的矢量,然后用较少的位数来表示,可以有效减少解码过程中的数据量和存储空间,同时提高解码的速度和质量。
二、选择适当的解码器选择适当的解码器也是实现高质量图片解码和显示的关键。
不同的解码器具有不同的解码能力和性能,因此需要根据具体的应用场景来选择合适的解码器。
1. JPEG解码器:如果需要解码JPEG格式的图片,可选择使用专门的JPEG解码器。
JPEG解码器通常具有较高的解码质量和性能,并且支持大多数嵌入式Linux系统。
2. PNG解码器:如果需要解码PNG格式的图片,可选择使用专门的PNG解码器。
PNG解码器通常具有较高的解码质量和压缩比,并且能够保留图像的透明信息。
3. GIF解码器:如果需要解码GIF格式的图片,可选择使用专门的GIF解码器。
GIF解码器通常具有较高的解码速度和多帧动画支持能力。
三、采用适配硬件加速为了进一步提高解码和显示的性能,可以采用适配硬件加速技术。
适配硬件加速可以利用图形处理器(GPU)等硬件资源来加速解码和渲染过程,从而实现高质量的图片解码和显示。
1. 利用GPU加速解码:现代嵌入式系统通常都具备图形处理器,可以利用GPU的并行计算能力来加速解码过程。
嵌入式系统中的实时图像处理算法设计
嵌入式系统中的实时图像处理算法设计在现代科技的快速发展下,嵌入式系统已经得到了广泛的应用。
嵌入式系统是指嵌入在其他设备中的计算机系统,包括硬件、软件和操作系统等组成。
而图像处理算法是嵌入式系统中非常重要的一部分,它能够使嵌入式系统具备图像识别、检测、跟踪等能力,为各种设备的更智能化提供支持。
实时图像处理算法设计是嵌入式系统中图像处理的基础,它的设计需要兼顾处理速度和处理质量。
在嵌入式系统中,资源有限,处理速度的要求更为关键。
因此,在设计实时图像处理算法时,需要考虑以下几个方面。
首先,基础算法选择。
在实时图像处理中,经常使用到的算法有边缘检测、图像滤波、目标检测等。
为了满足嵌入式系统对实时性的要求,要选择相对较快但又保持较好处理效果的算法。
比如,可以选择Canny边缘检测算法,它能够在较短的时间内提取图像的边缘信息,并保持较好的边缘检测效果。
另外,Haar特征分类器在目标检测中被广泛应用,能够提供快速而精确的目标检测结果。
其次,算法优化。
在选择好基础算法后,还可以通过对算法进行优化来进一步提高实时性。
常见的算法优化包括并行计算、硬件加速等。
并行计算能够将算法中的独立计算任务分配给多个处理单元并行执行,从而提高处理速度。
硬件加速则是采用专用的硬件设备来执行算法,比如使用FPGA或ASIC等,能够快速处理图像数据。
算法优化需要结合具体的硬件平台和应用场景进行设计,并进行充分的测试和验证。
另外,图像数据的压缩和传输也是实时图像处理中需要考虑的因素。
嵌入式系统中的图像处理通常需要从摄像头或传感器获得图像数据,然后经过处理后再输出。
为了提高处理速度,可以对图像数据进行压缩,减少数据量。
常用的图像压缩算法有JPEG、JPEG2000等。
此外,对于大规模图像数据的传输,可以使用无线通信技术,如Wi-Fi和蓝牙等,将处理后的图像数据传输到其他设备或云端进行进一步处理或存储。
最后,软件工程方面的考虑也是非常重要的。
遥感图像配准与镶嵌
mn
C(c, r)
( gi, j g ) ( gir, jc g)
i1 j1
相关函数(矢量数积)
R( p, q) g(x, y)g(x p, y q)dxdy
( x, y )D
R( p0, q0)> R(p, q)( pp0, q若qR(0)p0, q0)> R(p, q)( pp0, qq0),则 p0, q0
– SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变 性,对视角变化、仿射变化、噪声也保持一定程度的稳定性;
– 独特性好,信息量丰富,适用于在海量特征数据库中进行快速、准确地 匹配;
– 多量性,即使少数的几个物体也可以产生大量的SIFT特征向量; – 可扩展性,可以很方便的与其它形式的特征向量进行联合。
i1 j1
mn
mn
(gi, j g )2
( gir, jc gr,c )2
i1 j1
i1 j1
差绝对值和(差矢量分量绝对值和)
S( p, q) g(x, y) g(x p, y q)dxdy
( x, y )D
离散灰度数据差绝对值和的计算公式为
mn
S (c, r)
gi , j gir , jc
SIFT算法(二)
• SIFT特征匹配算法包括两个阶段,第一阶段是SIFT特征的生成,即从 多幅待匹配图像中提取出对尺度旋转、缩放、亮度变化无关的特征向 量;第二阶段是SIFT特征向量的匹配。
• SIFT特征向量的生成算法共包括4步:
– 尺度空间极值检测,以初步确定关键点位置和所在尺度; – 拟和三维二次函数精确确定位置和尺度,同时去除低对比度的关键点和
Hausdorff 距离等 • 4.消除错配
C语言嵌入式像处理与视觉导航技术

C语言嵌入式像处理与视觉导航技术C语言嵌入式图像处理与视觉导航技术嵌入式系统是一种特殊的计算机系统,它将计算机技术与其他设备或系统集成在一起,实现特定的功能。
而在嵌入式系统中,图像处理与视觉导航技术的应用越来越广泛。
本文将深入介绍C语言在嵌入式系统中的图像处理与视觉导航技术。
一、图像处理技术图像处理技术是对图像进行数字化处理和分析的过程。
在嵌入式系统中,图像处理技术主要应用于图像采集、图像压缩、图像特征提取以及图像识别等方面。
1. 图像采集图像采集是指通过嵌入式设备对外部信息进行采集和转化成图像的过程。
嵌入式系统中通常使用摄像头等传感器来采集外部的图像信息,并将其转化成数字信号进行处理。
2. 图像压缩图像压缩是指将图像的冗余信息进行压缩或者编码的过程。
在嵌入式系统中,由于存储容量和计算资源的限制,需要对采集到的图像进行压缩,以便更高效地存储和传输。
3. 图像特征提取图像特征提取是指通过算法或者方法从图像中提取出具有代表性的信息。
在嵌入式系统中,可以通过边缘检测、色彩提取等技术来获取图像的特征信息,为后续的图像识别和处理提供基础。
4. 图像识别图像识别是指通过对图像进行分析和处理,自动识别和判断图像中的对象或者场景。
在嵌入式系统中,可以利用机器学习算法或者模式匹配等方法进行图像识别,实现自主导航、目标追踪等功能。
二、视觉导航技术视觉导航技术是指利用图像处理和分析技术实现机器智能导航的过程。
在嵌入式系统中,视觉导航技术主要应用于智能车辆、机器人等自主导航领域。
1. 图像识别导航图像识别导航是指通过对图像进行识别和分析,实现车辆或机器人的导航和避障。
嵌入式系统中,通过对实时采集的图像进行实时处理,自动识别道路、障碍物等,并根据识别结果进行导航决策。
2. 视觉SLAM技术视觉SLAM(Simultaneous Localization and Mapping)技术是指通过对图像进行处理和分析,实现机器智能的定位和地图构建。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
优先级抢占式调度算法和同一优先级的时间片轮转调度
参考文献
算法各有利弊,本文提出的结合前两种算法的方法,以嵌入
[1] Hong Ziquan, Yang Jingyu. Optimal Discriminant Plane for a Small
式操作系统为手段,有效地解决了以上问题。
Number of Sample and Design Method of Classifier on the Plane[J].
2.2 图像转换
(1)根据经纬度坐标到像素坐标的映射函数,即可获得各
标准块图像四角相对于原大幅面图像的像素坐标。以第 1 块
为例,如图 3 所示,小块内任意一点 O 相对于原图像顶点 S
的像素坐标 O(X,Y)可由 O(lon,lat)代入式(2)获得。
O(lo n,la t)
A (X’,Y’) O(X,Y) S
Map Registration with Macro Data in Embedded Environment
LU Fei-fei, YUE Chun-sheng, XI Ling
(Institute of Information Engineering, Information Engineering University of PLA, Zhengzhou 450002)
经纬度坐标系
像素坐标系
图 3 坐标系的转换
(2)考虑到后期图像的无缝拼接,需要将像素坐标系下的 小块图像扩大配准误差的两倍。配准误差指利用校正多项式 求出的像素坐标与原像素坐标之差,如果配准误差比较小(如 只有零点几个像素),可将扩大范围限定为 10 个像素,保证 边界像素有一定量的冗余。如图 3 虚线所示的范围,记录左 上角坐标 A(X′,Y′),则扩大边界后的小块中任意一点在块内的 像素坐标为: x = X − X ', y = Y − Y ' 。
第 34 卷 第 2 期 Vol.34 No.2
计算机工程 Computer Engineering
2008 年 1 月 January 2008
·开发研究与设计技术·
文章编号:1000—3428(2008)02—0273—02 文献标识码:A
中图分类号:TP391
嵌入式环境下大数据量像素地图配准
陆菲菲,岳春生,奚 玲
【Abstract】Because of limited memory in embedded system, it is always impractical to read into and deal with the raster map with macro data into memory as a whole. So, this paper disposes the raster map with tile and hierarchy through building the image-pyramid model, and aligns each standard block image. It accomplishes the seamless splice of standard block using the mapping relation between geographic coordinate and image coordinate and proves its validity through the practice. 【Key words】embedded system; macro data; image-pyramid; registration
(2)将经纬度坐标代入式(2),可算出该点在扩大边界后的
小块图像内相对于原图像 S 点的像素坐标为
xA = F (LonA ); yA = F (LatA ) 因此,A 点相对于扩大边界后的小块的像素坐标为
X A = xA − X ';YA = yA − Y ' (3)提取该点像素颜色值赋给标准分块后的小块图像的对
的位置,然后再将像元的灰度值移到相应点上;反解变换法
则是从输出图像数据出发,依次反求每个像元在原始输入图
像坐标系的位置,同时把该位置的灰度值取出填回到输出图
像阵列中相应像元点上。正解变换法的缺点是有重复运算,
比较费时,且输出图像易产生裂缝,需作第 2 次灰度内插,
而反解变换则无此缺点,实际中多用反解变换法。
(解放军信息工程大学信息工程学院,郑州 450002)
摘 要:在嵌入式系统中,由于内存资源有限,若将大数据量像素地图一次性读入内存进行处理是不切实际的。该文通过构建图像金字塔 模型,将像素地图分块、分层处理,对分块后的各标准块图像进行配准,利用其地理坐标与像素坐标之间的映射关系实现了标准块的无缝 拼接,并通过实验验证了其有效性。 关键词:嵌入式系统;大数据量;图像金字塔;配准
栅格数据是栅格、矢量集成系统的重要数据源,而栅格 图像的纠正与配准是进行地理信息系统(GIS)中矢量数据与 栅格数据联合处理的关键性预处理工作,也是 GIS 空间数据 与栅格图像建立直接联系的“桥梁”。为了能够利用栅格图像 进行后续的图像叠加、地面目标提取及辅助 GIS 数据获取与 更新等工作,首先必须对图像进行几何校正与配准。然而, 像素地图一般较大,在高分辨率的情况下所需的存储空间可 能达上百兆,由于嵌入式系统内存容量有限,将一幅大数据 量像素地图一次性读入内存进行处理是不可行的。本文从图 像数据的组织结构出发,介绍了一种基于标准分块配准地图 的方法,并利用两幅图像的经纬度或大地坐标与新图像像素 坐标的对应关系实现标准块的无缝拼接,最终达到对整幅大 数据量栅格地图的校正。
应像素点。需要注意的是,图像中像素点点行列值的坐标是以
左上角点为原点的,而在写图像时,是从左下角点开始的。
坐标变换
l A k
取像素值
标准分块后的小块图像
扩大边界后的小块图像
图 4 坐标变换
在此过程中,考虑到弧线到折线近似的问题(系列比例尺 地形图图廓线都近似为折线),为消除拼接裂缝,采用如下方 法:利用交点算法判断标准分块后小块图像中的各点是否在 扩大边界后的小块图像内,如果在图 4 所示的阴影区内,则 对颜色值进行重采样,即通过一定的插值算法获得该点的颜 色值,常用的重采样方法有最邻近赋值法、双线性内插法、 双向三次内插法等;如果计算的像素点不在扩大边界后的图 廓之内,则取距离它最近的图廓内像素点的值(在 1:50 万地 形图上,这种裂缝在 40 度以下一般不大于 0.1 mm,表现在 分辨率为 150 dpi 的扫描图上,只有 0.6 个像素点)。对各小 块依次作以上处理,最终可实现小块图像的无缝拼接。
iY
j
∑ ∑ ⎨
⎪ ⎪⎩
F (lat)
=
N i=0
N −i
bij X
j=0
iY
j
(2)
一般实际研究地域所获得的图像对应的图像幅面较小,
常采用简便有效的多项式纠正方法作为校正模型。其中,(X,Y)
Hale Waihona Puke 为像素坐标,(lon,lat)为经纬度坐标,N 的选取取决于地图变形
的程度、基准控制点的数量和地形位移的大小。
第2 层 第1 层 第 0层
瓦片
图 1 瓦片金字塔构建示意图
实际上,金字塔的构建过程就是一个数据压缩的过程, “图像”至“分块”逐级简略,应用中可以根据实际的精度 要求,选择适当的数据压缩算法构建金字塔。
构建金字塔模型对图像进行分块分层处理不仅可以很方 便地建立索引,更重要的是利于后期图像拼接。因此,依据 栅格地图的分辨率可以将它划分到某一数据层,进而可以获 得对它进行标准分块后每一标准块的大小。
坐标到像素坐标之间的映射函数关系式,得到大幅面栅格地
图的四角经纬度值。校正多项式如下:
∑ ∑ ⎧
⎪
f
(x)
=
N
N −i
aijlonilat j
⎪
i=0 j=0
∑ ∑ ⎨
⎪ ⎪⎩
f
(y)
=
N i=0
N −i
bijlon ilat j
j=0
(1)
∑ ∑ ⎧⎪⎪F(lon)
=
N i=0
N −i
aij X
j=0
在变换过程中,对于变换后图像中的每一点,要反解其 在原图中的像素坐标值都必须经过两个变换:由新像素坐标 变换到地理坐标,再由地理坐标变换到原图像素坐标。
3 实验及结论
在台式机上,笔者用 VC 编程实现了上述算法。由于大 范围多尺度栅格数据获取相对困难,系统采用一幅分辨率 290 m/pixel,大小为 1 536×1 024 的河南省数字栅格地图(24 位 BMP 图像)进行调试。经压缩处理后,图 5 所示为参与配
—273—
北纬 ( 度)
原图经纬度 范围
西经 180 ( 度)
0
南纬 (度)
180 东经 ( 度)
图 2 标准分块
2 配准过程的实现
2.1 确定映射关系
分别建立栅格地图的像素坐标到经纬度坐标以及经纬度
坐标到像素坐标之间的转换关系。
利用各基准控制点的像素坐标与经纬度坐标确定校正多
项式的系数,从而分别建立像素坐标到经纬度坐标、经纬度
(下转第 277 页)
W1i W4i W6i W2i W3i W5i KNL_swi SEM Posts Other Threass PRD Ticks Time Assetioms
图 3 基于优先级的抢占式调度的神经元各层之间调度的波形
5 结束语
本文通过理论和硬件测试波形说明了在非线性多任务、 多进程的实时嵌入式系统中通过引入嵌入式实时操作系统任 务调度机制及神经网络思想可以大大提高程序的运行效率, 通过比较对同一算法在按顺序执行时的运行时间和优化后时 的运行时间对比,可以证明在基于嵌入式实时操作系统并以 BP 算法调度多任务,可以大大提高程序的运行效率。在本次 试验中程序的执行效率增加了 60%。从而证明采用基于嵌入 式操作系统的 BP 算法调度多任务的方法是有效的。