基于TEC-2000教学机的指令扩展研究
TEC-2000G教学计算机系统技术说明_16位机软件系统
第四章TEC-2000G教学机16位机软件系统4.1仿真终端程序PCECPCEC是用IBM-PC机的汇编语言编制而成的, 它可把IBM-PC作为教学机的终端完成数据的输入及显示,更重要的是它能实现PC机与教学机之间的文件传送,支持交叉汇编程序的使用。
而且,PCEC 还具有拷贝屏幕功能。
1.PCEC的运行过程在IBM-PC机上打入程序名 PCEC16并回车,接下来按程序的提示分别选择连接教学机的PC机的串行接口号(1或2)和通讯参数。
程序中默认的通讯参数为: 波特率9600, 8位字长, 无奇偶校验和1位停止位,没有特殊要求时一般不需修改这些参数。
IBM-PC机作为教学机的终端, 可以执行教学机监控程序的各种命令。
2. 文件传送过程PC机作为教学机的控制台之后, 按F10键, 显示菜单:0--Return to CRT Monitor1--Send a file to TEC2--Receive a file from TEC3--Return to IBM-PC MSDOS选择0 不执行任何操作,直接返回教学机的监控状态;选择3 退出通讯程序,返回IBM-PC的操作系统;选择1 将执行往教学机发送文件,即把指定的文件从磁盘中取出,通过串行口传送给教学机并存储于该机的主存中。
要求:被发送的文件一定是经交叉汇编程序ASEC16汇编后生成的 .COD文件,该文件包含有由ORG定义的程序或数据的首地址,传送时就以此地址作为目标地址;目标地址指向的主存应为RAM区。
选择2 将执行从教学机接收文件,并作为文件存于PC的磁盘中。
选择2之后,首先打入IBM-PC 中将用的文件名,就可以把教学机主存中某一区域中的数据传送给PC机。
要求:在执行文件传送之前,必须先用监控命令E在教学机主存2380H单元输入被传数据在教学机内存区的起始地址,在2381H 单元输入被传数据字节长度。
3.PCEC的拷贝屏幕功能按SHIFT/F10之后,屏幕上显示的所有信息均存储于SCR.TMP文件中,直到再次按SHIFT/F10或退出PCEC。
tec200016位机微程序控制器指令系统的设计与实现
一、设计题目16位机微程序控制器指令系统的设计与实现二、设计目的通过看懂教学计算机组合逻辑控制器中已经设计好并正常运行的几条基本指令(例如ADD、MVRR、OUT、MVRD、JR、RET等指令)的功能、格式和执行流程,然后自己设计微程序控制器中的29条基本指令和19条扩展指令的功能、格式和执行流程,并在教学计算机上实现、调试正确,达到以下目的:1、深入理解计算机控制器的功能、组成知识和各类典型指令的执行过程;2、对指令格式、寻址方式、指令系统、指令分类等建立具体的总体概念;3、学习微程序控制器的设计过程和相关技术。
三、设计说明控制器设计是学习计算机总体组成和设计的重要的部分。
要在TEC—2000教学计算机上完成这项设计,必须清楚懂得:1、TEC—2000教学机的微程序控制器主要由作为选件的微程序控制器小板和教学机大板上的7片GAL20V8组成。
2、TEC—2000教学机微程序控制器上要实现的全部基本指令和扩展指令的控制信号都是由微程序小板上的7片控制存储器给出的。
3、应了解监控程序的A命令只支持基本指令,扩展指令应用E命令将指令代码写入到相应的存储单元中;不能用T、P命令单步调试扩展指令,只能用G命令执行扩展指令。
4、要明白TEC—2000教学机支持的指令格式及指令执行流程分组情况;理解TEC—2000教学机中已经设计好并正常运行的各类指令的功能、格式、执行流程和控制信号的组成。
5、明确自己要实现的指令格式、功能、执行流程设计中必须遵从的约束条件。
6、为了完成扩展指令的功能、格式和执行流程,并在教学计算机上实现、调试正确的实验内容,具体过程包括:1)确定指令格式和功能,要受教学机已有硬件的约束,应尽量与已实现指令的格式和分类办法保持一致;2)划分指令执行步骤并设计每一步的执行功能,设计节拍状态的取值,应参照已实现指令的处理办法来完成,特别要注意的是,读取指令的节拍只能用原来已实现的,其他节拍的节拍状态也应尽可能的与原用节拍的状态保持一致和相近;3)在指令微程序表中填写每一个控制信号的状态值,注意要特别仔细,并有意识地体会这些信号的控制作用;4)将设计好的微码,装入控制存储器的相应单元;5)写一个包含你设计的指令的程序,通过运行该程序检查执行结果的正确性,来初步判断你的设计是否正确;如果有问题,通过几种办法查出错误并改正,继续调试,直到完全正确。
计算机组成实验报告
计算机组成实验报告计算机组成实验报告(共3篇)篇一:《计算机组成与结构》实验报告11 .实验目的:1).学习和了解TEC-2000 十六位机监控命令的用法;2).学习和了解TEC-2000 十六位机的指令系统;3).学习简单的TEC-2000 十六位机汇编程序设计;2.实验内容:1).使用监控程序的R 命令显示/修改寄存器内容、D 命令显示存储器内容、E 命令修改存储器内容;2).使用 A 命令写一小段汇编程序,U 命令反汇编刚输入的程序,用G 命令连续运行该程序,用T、P 命令单步运行并观察程序单步执行情况;3、实验步骤1).关闭电源,将大板上的COM1 口与PC 机的串口相连;2).接通电源,在PC 机上运行PCEC.EXE 文件,设置所用PC 机的串口为“1”或“2”, 其它的设置一般不用改动,直接回车即可;3).置控制开关为00101(连续、内存读指令、组合逻辑、16 位、联机),开关拨向上方表示“1”,拨向下方表示“0”,“X”表示任意。
其它实验相同;4).按一下“RESET”按键,再按一下“START”按键,主机上显示:TEC-2000 CRT MONITOR Version 1.0 April 2001Computer Architectur Lab.,Tsinghua University Programmed by He Jia >5).用R 命令查看寄存器内容或修改寄存器的内容a.在命令行提示符状态下输入:R↙;显示寄存器的内容图片已关闭显示,点此查看图片已关闭显示,点此查看b.在命令行提示符状态下输入:R R0↙;修改寄存器R0 的内容,被修改的寄存器与所赋值之间可以无空格,也可有一个或数个空格主机显示:寄存器原值:_在该提示符下输入新的值,再用R 命令显示寄存器内容,则R0 的内容变为0036。
图片已关闭显示,点此查看6).用D 命令显示存储器内容在命令行提示符状态下输入:D 2000↙会显示从2000H 地址开始的连续128 个字的内容;连续使用不带参数的 D 命令,起始地址会自动加128(即80H)。
TEC-2000教学计算机系统技术说明_16位机实验指导
运行过程中,可以直接看到屏幕上显示的内容,运行过后, 再用 D 20F0 命令看内存的 20F0 区 域中保存的运行结果:
0061 0062 0063 0064 0065 0066
上述 5 个例子, 都是用监控程序的 A 命令完成输入源汇编程序的。在涉及到汇编语句标号的地 方, 不能用符号表示, 只能在指令中使用绝对地址。使用内存中的数据, 也由程序员给出数据在内 存中的绝对地址。显而易见, 对这样的极短小程序矛盾并不突出, 但很容易想到,对很大的程序, 一 定会有较大的困难。
SHR R0
JRNC 2044
; 没有输入则循环测试
IN 80
; 输入字符到 R0
MVRD R1, 00FF
AND R0, R1
;清零 R0 的高位字节内容
CMP R0, R2
; 判输入字符≥字符'0'否
JRNC 2053
; 为否, 则转到程序结束处
CMP R0, R3
; 判输入字符≤字符'9'否
JRC 2053
A 2100 (2100)OUT
MVRD ADD STRR (2105)IN SHR JRNC RET
80 R1,0020 R0,R1 [R2],R0 81 R0 2105
; 输入用到的子程序到内存 2100 开始的存储区 ;输出保存在 R0 寄存器中的字符
;将保存在 R0 中的大写字母转换为小写字母 ;写 R0 中的字符到内存,地址同 LOD 所用的地址 ;测试串行接口是否完成输出过程
选用类似子程序调用方式使实验者的程序投入运行的,用户程序只有用 RET 语句结束, 才能保证程序
EIM电动执行器TEC2000使用手册

TEC2000在调试和使用该设备前 敬请仔细阅读该手册请抄记铭牌资料 EIM JOB NO. : _________ MODEL NO. : _________ SERIAL NO. : _________Table of contents 目录Table of Contents1 重要事项 11.1. 概述 (1)1.2. 安全说明 (1)1.3. 储藏和存放事项 (1)2 快速入门 22.1. 行程设置 (2)2.2. 网络设置 (6)2.3. 检查行程设置 (6)3 安装指南73.1. 准备阀杆驱动螺母 (7)3.2. 安装电动执行机构到阀门上 (8)3.3. 电气连接 (9)3.3.1. 拆下独立端子腔盖 (9)3.3.2. 电缆及穿入口的密封 (9)3.3.3. 推荐的电气端子接线 (9)3.3.4. 电缆连接 (10)3.3.5. 装回独立端子腔盖 (10)3.3.6. 外部接地保护接线 (11)3.4. DBM后备模块 – 选件 (11)3.5. 开关量输入远程控制 (12)3.6. ACM辅助控制模块 – 选件 (13)3.6.1. ACM辅助控制模块接线 (13)3.6.2. 模拟量控制接线 – 供电方式 (15)3.6.3. 外部VFD变频驱动模块接线 (17)3.6.4. 网络控制 (18)3.7. ARM辅助继电器模块的接线 (19)3.8. RDM远程模块与电动执行机构的连接 – 选件 (20)3.8.1. 使用24VDC电源供电 (20)3.8.2. 使用115/230VAC电源供电 (21)3.8.3. 2个RDM模块的连接(分别使用24VDC电源供电和115/230VAC电源供电) (21)4 操作指南224.1. LDM就地模块 (22)4.1.1. 图形显示和信息中心 (23)4.1.2. 控制旋钮和选择旋钮 (23)4.1.3. LED指示灯(发光二极管) (24)4.1.4. 显示内容 (25)4.2. RDM远程模块 (25)4.2.1. RDM远程模块和LDM就地模块之间的操作 (25)4.3. 红外钥匙 – “Clicker” (26)Table of contents4.4. 电动执行机构的初始化 (27)4.4.1. 行程设置 (27)4.4.2. 查看现有的设置 (27)4.5. LOCAL – 就地控制方式 (31)4.6. REMOTE – 远程控制方式 (31)5 定制电动执行机构参数325.1. 进入SETUP参数设置模式 (32)5.2. 行程设置 (33)5.3. 改变显示 (33)5.4. 显示设备参数 (35)5.5. 更改参数设置 (36)5.5.1. 输入密码 (37)5.5.2. 电动执行机构设置 (37)5.5.3. 行程设置 (39)5.5.4. 开关量输入设置 (40)5.5.5. 开关量输出设置 (41)5.5.6. 运动禁止和ESD紧急关断设置 (45)5.5.7. 双速计时器设置 (46)5.5.8. 模拟量控制设置(Futronic - ACM 辅助控制模块) (48)5.5.9. 网络控制设置(CAM 通讯模块和Controlinc - ACM 辅助控制模块) (52)5.5.10. 工位号设置 (55)5.5.11. 密码设置 (56)5.5.12. 重新载入工厂设置 (56)6 故障诊断及排除576.1. 故障分析及排除 (57)6.2. 显示自诊断信息 (58)6.2.1. 显示报警日志 (59)6.2.2. 显示力矩趋势记录 (60)6.2.3. 显示历史力矩记录 (60)6.2.4. 显示操作日志 (61)6.2.5. 显示历史操作记录 (62)6.2.6. 显示硬件状态 (63)7 设备维护647.1. 维护时间表 (64)7.2. 润滑 (64)7.3. 压力释放阀 (64)7.4. 更换熔断保险 (65)7.5. 更换Clicker“红外钥匙”的电池 (65)重要:EIM公司在此使用手册的编撰及修订时已经考虑了多方面的使用和应用,然而EIM公司不保证手册内容无任何错误,也无法对误操作或使用本手册而导致的产品损坏负责。
TEC-2000A八位机的研究与实现

. .. .. .. ..实验报告TEC-2000A八位机的研究与实现第57组组长:庞一学号:011675组员:柏青学号:011596王晓丽学号:011693. .. .. .. ..目录1实验任务1.1分工1.2完成情况2实验原理2.1硬件系统2.1.1总线2.1.2 控制器部件2.1.2.1 微程序控制器原理2.1.2.2 组合逻辑控制器原理2.1.3 运算器部件2.1.4 IO接口2.1.5 中断线路2.2软件系统2.2.1监控程序2.2.2仿真终端程序PCEC2.2.3交叉汇编程序ASEC2.2.3.1 交叉汇编程序使用说明2.2.3.2 交叉汇编程序设计要求3 运算器设计与实现3.1 设计要求3.2 设计过程3.3 8位机运算器逻辑图3.4 设计心得4指令系统设计与实现4.1 指令系统4.2 控制信号功能说明4.3 微程序控制器设计与实现. .. .. .. .4.3.3 控制信号在控制存储器中的实现4.3.4 maprom的实现原理与方法4.3.5 其它器件的设计与实现4.3.6微程序控制器逻辑图4.3.7 实验心得4.4 组合逻辑控制器设计与实现4.4.1 控制信号设计4.4.2节拍发生器设计4.4.3 mach设计4.4.4组合逻辑控制器逻辑图4.4.5 实验心得5 扩展任务5.1 修改监控5.1.1 指令分类5.1.2 数据集1(data.src data.equ)5.1.3 数据集2(data2.src data2.equ)5.1.4 汇编子程序模块(asm.src asm.equ)5.1.5 反汇编子程序模块(uasm.src uasm.equ)5.1.6 汇编命令处理模块(command3.src)5.1.7 反汇编命令处理模块(command4.src command4.equ)5.1.8 用户程序运行命令模块(command2.src)5.1.9 入口地址修改5.1.10 监控程序连接5.2 中断实验5.2.1 实验原理. .. .. .. .5.3 书中错误5.4 存储器的扩展5.4 其它成果6 测试与实验结果6.1 基本指令测试6.2 扩展指令测试6.3 中断程序7 收获与总结8 课程建议9 提交文件清单实验报告TEC-2000A八位机的研究与实现1.实验任务TEC2000是新型的供教学使用的计算机,硬件组成相对完备,并且已经实现了16位的组合逻辑和微程序两套系统。
TEC-2000A教学机概要介绍
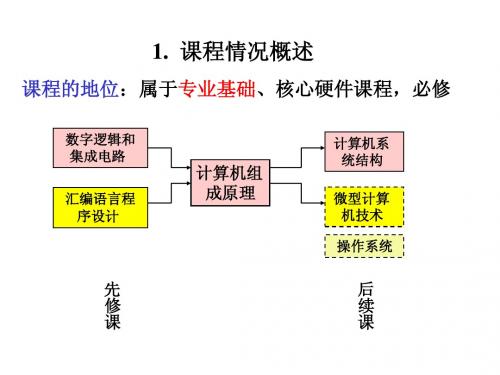
用硬件和软件 2 种方案实现的教学计算机系统
通过硬件和软件 2 种方案,实现相同功能的计算机系统, 是教学改革的又一次重大突破。 第一次突破,起步于1990年,教学实验从孤立的部件实验 转变到在整机上进行,所用设备从硬件裸机转变为配备了监控 程序和汇编语言的整机系统,在理论联系实际,深化教学内容, 增强能力培养等方面取得明显进展。使学生从感到课程内容抽 象、所学知识用在哪里、学过课程会做什么的种种疑惑中解脱 出来,教学质量有了明显提高。 第二次突破,表现在开发出教学计算机的辅助设计软件和 教学机的软件模拟系统,使得教学实验可以完全脱离教学机硬 件系统而直接在PC机上进行准备和执行,设计效率和设计质 量更高,保证学生可以真正地完成教学计算机完整控制器的设 计过程,接下来可以通过模拟软件检验设计结果的正确性,最 后把设计的最终结果编程到教学计算机的硬件中,启动教学机 并运行相应程序,检查真实的运行情况。这种方案符合开展带 有一定研究型的教学要求,向创办世界一流大学前进了一步, 也是实现与国际上著名高校校教学方案接轨的重要措施之一。
前一版书中有教学课件,和用动画方式演示重点难点内容。 教师的教案是用工具软件 Power-Point 设计与实现
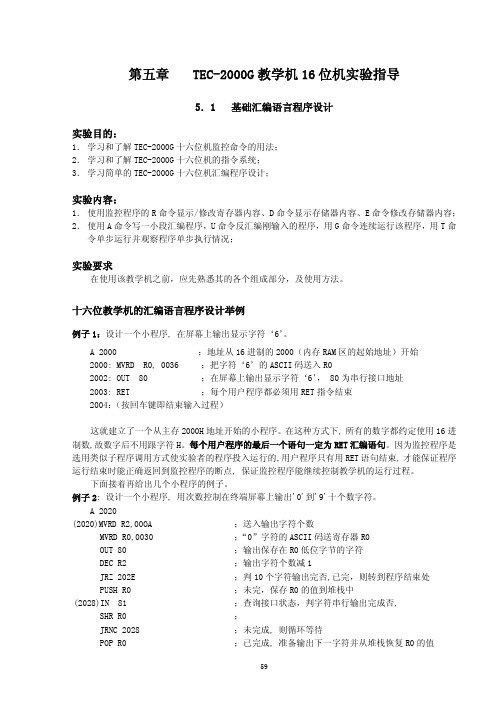
教学实验指导书
计算机组成原理实验指导, 王诚 等, 清华大学出版社 在实验指导书中,对 TEC-2000 教学计算机的具 体组成进行了详细说明,包括所用器件,总框图,各 部件的逻辑图,详细的设计文档,包括主要程序清单, 可编程器件的内容,各部件的设计说明等,可以说文 字和图纸资料相当齐全。 对需要完成的教学实验项目有详细解释,包括具 体内容,实验步骤和最终要求。例如,汇编语言程序设
tec2000计算机终端pc机微程序控制器运算器16位按键开关指示灯5v硬布线控制器resetstart按键运行功能选择开关单步手拨组合逻辑8位联机连续内存微程序16位脱机两个12位的微型开关16位的手拨输入开关微程序控制器小板串行口接线座5v直流电源电源开关组合逻辑控制器运算器内存串口电路i86i53i20sstscisshresetstart按键运行功能选择开关单步手播组合逻辑8位联机连续内存微程序16位脱机两个12位的微型开关16位的手拨输入开关dc2dc1ar控制运算器的24位信号节拍指示灯irczvs状态位ibmioreqwe运算器的状态位i86i53i20sstscissh条件码微指令下地址部件微指令地址映射部件时序控制信号形成部件移位信号进位信号状态位触发器8位运算器部件运算器部件内存储器部件内存储器部件高位地址寄存器程序计数器指令寄存器微指令寄存器控制存储器2片译码器在运算器芯片内3片译码器电平转换线路时钟分频线路扩展实验串行接口芯片串行接口intel8251芯片5v直流电源其他通用接口扩展实验低位地址寄存器ckirpc转移地址1送地址寄存器cout移位信号cin移位信号oesstcyzrov移位信号scisshcin移位信号几个寄存器的接收允许送内部总线的选择控制信号及读写命令送入出设备移位信号cin8位内部总线ib来自八位开关来自八位开关读写命令oe数据总线高位地址总线地址总线送译码电路并行数据读写命令oeoe接地8位内部总线ib串行入出时钟信号clkdc2320dc1310mioreqwea3a0b3b0i8i0sst2sst0sci1sci0ssh1ssh0oe内存3位地址io端口高位地址3个无锁按键中断源intoe下地址字段控制命令字段intsintpresetscc16寄存器当前微指令地址ccarlarhoeclk图33tec2000总体框图01ram0q0ram1516位的运算器16ovrf15来自内部总线ibsshsshsci右移控制左移控制ram15q15ram0q0q15f15cyram0y150d150i8i0cin运算器部件的脱机实验y15y0用16个指示灯显示结果d15d0ram15q15ram0q0cincyoverf15a30b30i86用16个开关提供输入数据sshsstscii53i20scisshi86i53i20sst通过24位微型开关提供控制信号操作功能控制
TEC-2000指令系统
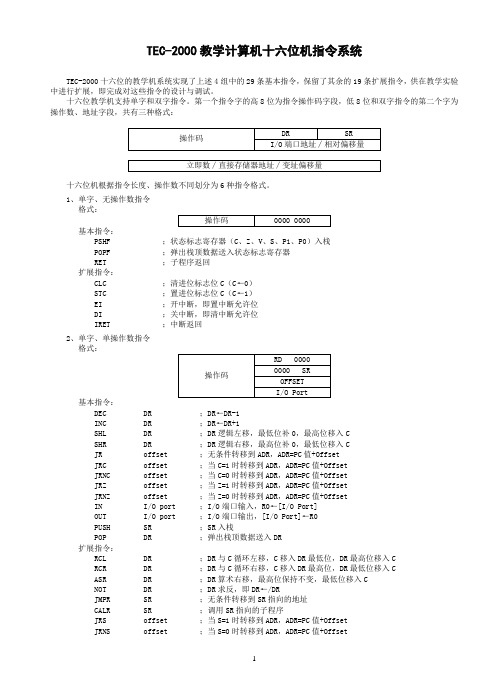
TEC-2000教学计算机十六位机指令系统TEC-2000十六位的教学机系统实现了上述4组中的29条基本指令,保留了其余的19条扩展指令,供在教学实验中进行扩展,即完成对这些指令的设计与调试。
十六位教学机支持单字和双字指令。
第一个指令字的高8位为指令操作码字段,低8位和双字指令的第二个字为操作数、地址字段,共有三种格式:十六位机根据指令长度、操作数不同划分为6种指令格式。
1、单字、无操作数指令格式:基本指令:PSHF ;状态标志寄存器(C、Z、V、S、P1、P0)入栈POPF ;弹出栈顶数据送入状态标志寄存器RET ;子程序返回扩展指令:CLC ;清进位标志位C(C←0)STC ;置进位标志位C(C←1)EI ;开中断,即置中断允许位DI ;关中断,即清中断允许位IRET ;中断返回2、单字、单操作数指令格式:基本指令:DEC DR ;DR←DR-1INC DR ;DR←DR+1SHL DR ;DR逻辑左移,最低位补0,最高位移入CSHR DR ;DR逻辑右移,最高位补0,最低位移入CJR offset ;无条件转移到ADR,ADR=PC值+OffsetJRC offset ;当C=1时转移到ADR,ADR=PC值+OffsetJRNC offset ;当C=0时转移到ADR,ADR=PC值+OffsetJRZ offset ;当Z=1时转移到ADR,ADR=PC值+OffsetJRNZ offset ;当Z=0时转移到ADR,ADR=PC值+OffsetIN I/O port ;I/O端口输入,R0←[I/O Port]OUT I/O port ;I/O端口输出,[I/O Port]←R0PUSH SR ;SR入栈POP DR ;弹出栈顶数据送入DR扩展指令:RCL DR ;DR与C循环左移,C移入DR最低位,DR最高位移入CRCR DR ;DR与C循环右移,C移入DR最高位,DR最低位移入CASR DR ;DR算术右移,最高位保持不变,最低位移入CNOT DR ;DR求反,即DR←/DRJMPR SR ;无条件转移到SR指向的地址CALR SR ;调用SR指向的子程序JRS offset ;当S=1时转移到ADR,ADR=PC值+OffsetJRNS offset ;当S=0时转移到ADR,ADR=PC值+Offset3、单字、双操作数指令格式:基本指令:ADD DR, SR ;DR←DR+SRSUB DR, SR ;DR←DR-SRAND DR, SR ;DR←DR∧SRCMP DR, SR ;DR-SRXOR DR, SR ;DR←DR⊕SRTEST DR, SR ;DR∧SROR DR, SR ;DR←DR∨SRMVRR DR, SR ;DR←SDLDRR DR, SR ;DR←[SR]STRR DR, SR ;[DR]←SR扩展指令:ADC DR,SR ;DR←DR+SR+CSUBB DR,SR ;DR←DR-SR-C4.双字、单操作数指令格式:基本指令:JMPA ADR ;无条件转移到地址ADRCALA ADR ;调用首地址为ADR的子程序5.双字、双操作数指令格式1:基本指令:MVRD DR, DATA ;DR←DATA扩展指令:LDRA DR, [ADR] ;DR←[ADR]STRA [ADR], SR ;[ADR]←SR格式2:扩展指令:LDRX DR, offset[SR] ;DR←[offset+SR]STRX offset[SR],DR ;[offset+SR]←DRTEC-2000 十六位指令汇总表一、基本指令说明:1)表中CZVS一栏,“*”表示该标志位在指令执行后被重置,“·”表示该标志位不受指令执行的影响。
计算机组成原理实验手册(TEC2000)

TEC-2000使用手册教学机使用方法简介摘要:一、设置左下方5个开关状态,确定实验箱的工作模式二、选按RESET键,再按START键教学机开始工作教学机与PC机的互联摘要:一、教学机和PC机通过RS-232串行口通信。
二、教学机使用其固化在ROM上的监控程序与PC机运行的仿真终端程序PCEC16通信。
三、使用PCEC主要可完成以下功能1、通过PC机向教学机加载程序2、向监控程序发送调试命令,使之控制程序在教学机中的运行,可令程序单步运行、连续运行等,控制方法参见监控程序一节。
仿真终端程序PCEC监控程序PCEC与监控程序的通信方法一、PCEC与监控程序的通信1、PCEC在接到串行口数据(8位)时的动作(教学机送来的):将接收到的数据当成ASCII 码,在屏幕上显示对应的字符。
2、监控程序在接到串行口数据时的动作(PC机上的PCEC送来的):若接到的字符为A/U/G/T/R/E/D这7个监控命令,则继续接收命令的剩余字符,直到收到回车符,则接收一条完全的命令,接下来根据收到的命令做相应的操作。
例如,收到的是A命令,则继续接收程序的机器码,并将这些机器码放到指定的内存地址;若收到的是G命令,则跳去执行用户程序,直至执行到用户程序的RET指令,返回监控程序继续执行;若是U命令,则将目标地址的指令进行反汇编,将反汇编结果发送给PCEC显示……二、PCEC与教学机上的用户程序的通信1、用户在PC机上(PCEC运行在前台)按下键盘按键,该键的ASCII码会被PCEC发送给教学机的串行通信控制器8251,8251将接收下来的ASCII码存放在其数据输入寄存器(端口号80H),用户程序只要读80H(IN 80H)端口,即可获得PC按键的ASCII码(R0低8位)。
2、用户程序若要在PC机的PCEC窗口显示一个字符,只需将该字符的ASCII码存放在R0的低8位,然后用OUT 80H将R0的值送到80H端口(8251的数据输出寄存器端口号),则接下来8251会自动将该ASCII码发给PCEC,PCEC收到ASCII码后即会将其显示在其窗口中。
基于TEC-2000平台的(X^2-1)Y指令设计

计算机科学学院课程设计报告课程计算机组成原理题目基于TEC-2000平台的(X^2-1)Y指令设计年级2011级专业计算机科学与技术学号 11061007学生任课教师2014 年03 月16 日课程设计题目基于TEC-2000平台的(X^2-1)Y指令设计验收时间2014.3.12验收地点9#307指导教师喻成小组成员具体分工备注课题总体设计思想概述这条指令的设计是按照表达式(X^2-1)Y来进行设计的,指令设计的初定目标是利用X来进行存储用户输入的第一个数,Y来存储用户输入的第二个数,通过封装MVRR这条指令,来实现表达式的求值运算。
在对指令进行封装的过程中,通过修改入口地址,来对完成表达式,进行微程序编写,并通过对应微指令将其转化为二进制代码,录入ROM 中。
所封装的指令的入口地址为90H,即必须将MVRR这条指令的下地址修改为90H(即10010000),来使程序顺利写入与运行。
课题设计目的和原理实验目的:1. 本次课程设计的设计题目是(X^2-1)Y表达式的求值。
2. 加强对教学机的各种指令、编码的学习与操作,进一步熟悉教学机算计的指令格式、指令编码及指令功能等,同时学会把汇编语言所学的知识,结合计算机组成原理的相关知识,从而实现相对应指令的功能。
3. 对计算机的总体组成和各个部件的运行原理做进一步的理解。
熟悉教学计算机的微程序控制器的组成和运行原理,学习设计微程序控制指令的过程和方法。
4.通过课程设计,提高动手能力,在实际操作中加深对计算机各部件的组成和工作原理的理解,掌握微程序计算机中指令和微指令的编码方法,深入理解机器指令在计算机中的运行过程。
实验原理:首先仔细分析指令的功能,并对其进行相应的指令格式设计,合理设计出指令的执行步骤。
其次,将扩展指令指定指令操作码,特别注意入口地址的安排。
最后按照执行顺序和步骤,设计好相应的控制信号,录入对应的ROM中,通过调试和运行,完成微程序设计。
基于TEC-XP16教学机的扩展指令研究
基于TEC-XP16教学机的扩展指令研究宗德才;王康康【摘要】本文首先基于TEC-XP16教学机,介绍了在组合逻辑控制器中扩展指令的主要过程.然后,以扩展SWRR指令为例,详细介绍了如何在控制器的源文件中添加扩展指令的控制信号的逻辑表达式、编译控制器的源文件、对MACH器件进行编程、编写程序验证扩展指令是否正确的整个过程.本文对控制器部件的教学实验有一定的指导作用.【期刊名称】《电气电子教学学报》【年(卷),期】2018(040)005【总页数】6页(P145-150)【关键词】计算机组成原理;教学机;扩展指令【作者】宗德才;王康康【作者单位】常熟理工学院计算机科学与工程学院,江苏常熟215500;江苏科技大学数理学院,江苏镇江212003【正文语种】中文【中图分类】TP3320 引言“计算机组成原理”是计算机专业重要的核心基础课之一,在整个计算机专业教学中起着承上启下的作用[1]。
该课程具有涉及面广、抽象性强和学习难度大的特点,其实验教学有助于对抽象理论的理解,因此,必须对该课程实验教学环节给以足够的重视[2]。
目前,我校“计算机组成原理”实验教学内容主要是基于清华大学计算机系研制的TEC-XP16 计算机实验系统而开展进行的。
与大多数高校一样,该实验教学内容,主要停留在验证性实验部分,为了使学生更好地掌握计算机的各个组成部件的工作原理,理解指令的执行流程,系统地建立计算机整机概念,培养学生的设计、创新能力,培养学生对计算机系统的分析、应用、设计及开发能力,需要开发一些设计性实验。
为此,我们在该实验系统上,以扩展六条指令为例介绍了在TEC-XP16教学机组合逻辑控制器中扩展指令的主要过程,并以扩展SWRR指令为例,详细介绍了如何在控制器的源文件中添加扩展指令的控制信号的逻辑表达式、编译控制器的源文件、对MACH器件进行编程、编写程序验证扩展指令是否正确的整个过程。
以此作为TEC-XP16实验系统的设计性实验。
TEC-2000G教学计算机系统技术说明_16位机实验指导
; 输入用到的子程序到内存 2100 开始的存储区 ;输出保存在 R0 寄存器中的字符
;将保存在 R0 中的大写字母转换为小写字母 ;写 R0 中的字符到内存,地址同 LDRR 所用的地址 ;测试串行接口是否完成输出过程
;未完成输出过程则循环测试 ;结束子程序执行过程,返回主程序
运行过程中,可以直接看到屏幕上显示的内容,运行过后, 再用 D 20F0 命令看内存的 20F0 区 域中保存的运行结果:
压 START 前
运算
I8-I0 SST SCi SSH A
B ALU CZVS
输出
*D1+0->R0
011000111 001 00 00 不;0->R1
011000111 001 00 00 不用 0001
R0+R1->R0
011000001 001 00 00 0001 0000
压 START 后 ALU CZVS 输出
实验要求
1. 实验之前认真预习,写出预习报告,包括操作步骤,实验过程所用数据和运行结果等,否则实 验效率会很低,所学到的内容也会大受影响;
2. 实验过程当中,要仔细进行,防止损坏设备,分析可能遇到的各种现象,判断结果是否正确, 记录运行结果;
3. 实验之后,认真写出实验报告,包括对遇到的各种现象的分析,实验步骤和实验结果,自己在 这次实验的心得体会与收获。
经设计好并正常运行的各类指令的功能、格式和执行流程,也包括控制器设计与实现中的具体线 路和控制信号的组成。扩展指令的参考设计方案,已在第二章中给出。 5. 要明确自己要实现的指令格式、功能、执行流程设计中必须遵从的约束条件。 为了完成自己设计几条指令的的功能、格式和执行流程,并在教学计算机上实现、调试正确的实 验内容,具体过程包括: 1) 确定指令格式和功能,要受教学机已有硬件的约束,应尽量与已实现指令的格式和分类办法 保持一致; 2) 划分指令执行步骤并设计每一步的执行功能,设计节拍状态的取值,应参照已实现指令的处 理办法来完成,特别要注意的是,读取指令的节拍只能用原来已实现的,其他节拍的节拍状态也应 尽可能地与原用节拍的状态保持一致和相近; 3) 在指令流程表中填写每一个控制信号的状态值,基本上是个查表填数的过程,应该特别仔细, 并有意识地体会这些信号的控制作用; 4) 写出每个控制信号的完整逻辑表达式,可能和必要的话,进行一点逻辑化简; 5) 把这些控制信号,按教学计算机设计中规定的几个 GAL20V8 的引脚分配结果编程到相应的 GAL20V8 芯片中去; 6) 写一个包含你设计的指令的程序,通过运行该程序检查执行结果的正确性,来初步判断你的 设计是否正确;如果有问题,通过几种办法查出错误并改正,继续调试,直到完全正确。
基于TEC-XP16教学机的扩展指令研究

微程序控制器采用存储器电路把控制信号存储 2.1 设计条件
第 卷 40 年 2018
第
10
月5 期
电气电子教学学报
JOURNAL OF EEE
Vol. 40 No. 5 Oct. 2018
基于 TECXP16 教学机的扩展指令研究
宗德才1,王康康2
(1. 常熟理工学院 计算机科学与工程学院,江苏 常熟 ; 215500 2. 江苏科技大学 数理学院,江苏 镇江 ) 212003
习难度大的特点,其实验教学有助于对抽象理论的 设计性实验。为此,我们在该实验系统上,以扩展六
理解,因此,必须对该课程实验教学环节给以足够的 条指令为例介绍了在 TEC - XP16 教学机组合逻辑
重视 。 [2]
控制器中扩展指令的主要过程,并以扩展 SWRR 指
目前,我校“计算机组成原理”实验教学内容主 令为例,详细介绍了如何在控制器的源文件中添加
第一作者:宗德才(1979),男,硕士,副教授,主要从事计算机系统结构方向的教学与研究工作,Email:zongdecaixhl@ 126. com
1 46
电气电子教学学报
第 40 卷
展指令是否正确的整个过程。以此作为 TEC - 功能线路之间的布线连接,可以保证更高的实验效
摘要:本文首先基于 TEC - XP16 教学机,介绍了在组合逻辑控制器中扩展指令的主要过程。然后,以扩展 SWRR 指令为例,详细介绍了如何在
控制器的源文件中添加扩展指令的控制信号的逻辑表达式、编译控制器的源文件、对 MACH 器件进行编程、编写程序验证扩展指令是否正确
的整个过程。本文对控制器部件的教学实验有一定的指导作用。
, ZONG Decai1 WANG Kangkang2
TEC-2000实验说明

实验说明一.TEC-2000教学机使用手册1. TEC-2000教学机介绍2. TEC-2000教学机和PC机的互联教学机和PC机通过RS-232串行口通信教学机使用其固化在ROM上的监控程序监控与PC机的通信PC机通过运行仿真终端程序PCEC与教学机进行通信。
即PC使用PCEC程序通过串行口与教学机的监控程序通信.使用PCEC主要可完成以下功能:1) 通过PC机向教学机加载程序2) 向监制程序发送调试命令,使之控制程序在教学机中的运行,可令程序单步运行、连续运行等,控制方法参见监控程序一节。
二.仿真终端程序PCEC由于教学计算机只配有开关、按钮、指示灯形式的输入输出设备,而没有标准的输入输出设备,所以就需要利用PC机的键盘和显示器进行程序和命令的输入和显示,解决的方法就是采用PCEC这样一个程序来控制PC 机与教学机之间的信息传送,所以PCEC被称为联机通讯程序。
1. PCEC的运行过程(1)进入微型机C 盘上的a文件夹;(2)双击PCEC16图标,出现如图所示的界面:(3)以上内容表明系统默认选择串口1(com1),可根据实际连接情况选择串口1或是串口2,按回车后出现如图界面:(4)上图中是系统设定的一些有关串口传输参数,没有特殊要求时一般不需修改这些参数,建议用户不要改动,直接回车,然后按一下教学计算机的“RESET”按钮,再按一下“START”按钮,出现大于号(> )提示符,界面如下图所示:此时表明TEC-2000教学计算机与PC机联机通讯正常。
系统处于命令行状态,即可通过发出计算机提供的监控命令执行相应的操作。
2. 监控命令(1) 单条汇编命令A用A 命令键入一段汇编源程序。
在命令行提示符状态下输入:A 2000↙;表示该程序从2000H地址开始,屏幕将显示:2000:输入如下形式的程序:2000: MVRD R0,0036 ↙2002: OUT 80↙2003: RET ↙;程序的最后以RET指令结束2004: ↙(直接敲回车键,结束A命令输入程序的操作过程)若输入有误,系统会给出提示并显示出错地址,用户只需在该地址重新输入正确的指令即可。
TEC-2000G实验箱介绍
一:TEC2000 主要指标:1:字长16位2:内存18k二:主要部件1:地址寄存器ARH,ARL,在AM2901的右边,只接受运算器的结果输出信号。
2:AB15-AB8,AB7-AB0地线址总3:指令寄存器IRH和IRL74Ls377。
用2片74ls244增加信号的驱动能力,IRHDRB74LS244,IRLDRB74LS2444;运算器是由4片AM2901芯片组成。
共16位。
其中有16个通用寄存器,R0_R15:其中程序计数器用R5来实现,堆栈指针SP用R4来实现。
其余的14个通用寄存器5:控制器是部件支持微程序和组合逻辑(MACH)2种控制器。
微程序控制器用一块小印刷电路板实现,直接插在大板左上方72芯插槽上。
由:1)1片微程序定序器AM2910:根据机器的运行状态与当前微微指令的有关内容,正确地形成下一条微指令的地址,以保证微程序按要求的微指令序列逐条执行2)8片只读程序器控存。
用于存放微程序3)MapROM微指令地址映射部件:4)微指令寄存器:用来存放当前微指令的内容,由1片74ls374,1片74ls273和7片Gal20v8组成(在大板上)5)当前微地址寄存器:用于存放当前微指令的微地址,由1片74ls377和74ls244组成6):条件判断线路由1片GAL20v8 实现。
6:数据总线分为IB和DB。
IB和DB用74LS245连接,其中Db共有16个灯可用来观察试验结果7:存贮器:共6片,分2组:每组由2片8K字节容量的28 c64ROM芯片和1片2k字节容量的6116RAM组成,。
另2个芯片EXtROMH,EXTROM用来扩展。
内存地址空间的分配说明:0000H—1FFFH:监控程序2600H-27FFH:监控程序临时数据和堆栈2000H-25FFH:用户区,可存放用户的程序和数据4000H—FFFFH用户扩展区,可存放用户的程序和数据8:DC574ls138(在最下一片运算器的旁边)为内存地址译码器9:reset:复位按钮,产生总清信号,使TEC_2000从监控程序的首地址重新运行,是实验出错,造成死机之后的解决办法。
基于Windows 2000的实时扩展研究的开题报告

基于Windows 2000的实时扩展研究的开题报告标题:基于Windows 2000的实时扩展研究研究背景:随着信息技术的发展,各种计算机应用领域对于实时性的要求越来越高,尤其在工业自动化、网络通信等领域。
而Windows 2000操作系统在这些领域中,由于其先进的图形界面和易用性,成为了广泛使用的操作系统之一。
但是,Windows 2000的实时性并不好,而实时性的不足往往会导致生产或执行任务出现严重的问题。
因此,对于Windows 2000的实时扩展研究具有重要的意义。
研究目的:本研究的目的是在深入分析Windows 2000操作系统实时性不足的原因和特点的基础上,通过实时扩展技术提高Windows 2000的实时性能力,从而满足工业自动化、网络通信等领域对实时性的需求。
研究内容:本研究的主要内容包括以下方面:1.分析Windows 2000操作系统实时性不足的原因和特点。
2.研究实时扩展技术的原理和实现方式。
3.设计并实现基于Windows 2000的实时扩展系统,并对其进行性能测试。
4.对实验结果进行分析和总结,评估该系统的实时性能力。
研究方法:本研究采用文献研究、实验室实验和数据分析等方法,具体实施步骤如下:1.收集相关文献和资料,深入研究Windows 2000操作系统实时性不足的原因和特点,了解实时扩展技术的基本原理和实现方式。
2.设计实时扩展系统的实现方案,包括实时驱动程序的编写、内存管理、中断处理等方面的优化。
3.根据实现方案,编写实时扩展系统代码,并进行系统测试。
4.通过性能测试和数据分析,评估该系统的实时性能力。
研究意义:本研究的意义在于提高Windows 2000操作系统的实时性能力,满足工业自动化、网络通信等领域对实时性的需求,对操作系统的实时扩展技术的发展和研究具有重要的参考价值。
研究预期结果:预计通过实时扩展技术,改善Windows 2000操作系统的实时性能力,并且提高了其时间和空间效率,可以大大提高Windows 2000在工业自动化以及网络通信等领域的应用价值和实用性。
主程序文档
TEC-2000 BASIC主程序文档一、版本、实现与运行(1)TEC-2000 BASIC main modulev1.00(2)用TEC-2000教学机的指令系统实现BASIC语言的解释执行程序,并存放在主存储器ROM区的监控程序之后的部分,2002年8月完成。
(3)在监控程序启动起来之后,通过G 0A30 命令启动该BASIC解释执行程序。
二、功能TEC-2000 BASIC解释程序,负责处理与用户的接口,即循环处理执行指令和BASIC 的语句。
执行指令包括:new 清除内存缓冲区已有内容,准备输入一个新的BASIC程序run 运行已输入的BASIC程序delete 删除BASIC程序中的指定行号的语句list 显示输入的一个BASIC程序所有语句system 退回监控系统语句输入规则:即时命令直接输入运行程序语句前面加行号如果只输入一个行号后面没有语句,则此行号无效。
如果原来存在以此行号为标识的语句,则删除原语句。
三、技术资料1.程序结构主程序为一循环结构,负责完成用户输入->分析处理输入的过程。
(1)用户输入:见原码;..........get instruction............下面部分调用函数:057fh:显示一串字符(来自监控)056bh:显示一个字符(来自监控)0589h:输入一串字符(来自监控)(2)分析:见原码;..........parse and prepare..........下面部分对于每句输入,首先判断是否带有行号。
若有,则转一般语句处理部分。
否则,转即时语句处理部分。
调用函数:parse:分析语句(来自reswrd模块)FToUI:浮点变成整数(来自浮点模块)(3)即时语句处理:见原码;........instant command..............下面部分转相关函数。
若非正确语句,则出错处理。
(4)一般语句处理:见原码;..........normal command...........下面部分这段代码完成输入指令在内存中的组织,及以上所叙述的功能。
在TEC-2000及TEC-2000A教学计算机上实现PLD及CPLD电子线路实验方法

在TEC-2000及TEC-2000A教学计算机上实现PLD及
CPLD电子线路实验方法
赵丽梅
【期刊名称】《宁波广播电视大学学报》
【年(卷),期】2005(003)003
【摘要】为了较好完成<计算机组成原理>实验中有关重置简单可编程PLD器件GAL20V8芯片及复杂可编程CPLD器件MACH中的内容实验,探寻了在TEC-2000及TEC-2000A教学计算机上在不改变硬布线情况下进行PLD及CPLD电子线路实验的技术路线及具体实现方法.
【总页数】4页(P71-74)
【作者】赵丽梅
【作者单位】宁波广播电视大学,浙江,宁波,315010
【正文语种】中文
【中图分类】O4-39
【相关文献】
1.基于CPLD的AM通信实验教学系统的设计与实现 [J], 卢艳红
2.计算机EPP控制CPLD显示点阵汉字的实现 [J], 董申;刘艳萍;张庆杰
3.采用CPLD电路实现组合逻辑模型计算机 [J], 吴保荣
4.复杂可编程逻辑器件CPLD专题讲座(Ⅴ)──CPLD的应用和实现数字逻辑单元及
系统的设计 [J], 李景华;王君
5.基于CPLD教学CT实验仪数据采集系统的设计与实现 [J], 张平;周日峰;刘丽莎因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 0 :T R [ 3,8 06SR R 1 R
内存 单 元 中 2 0 :W R 7 [ 3 07S M R , 】 R 与寄存器 R 7的 内 容 交 换
2 08: VRD , 01 0 M R60l
R6
:
:
将 R 8的 内 容 送 入 R 3所 指 的
令 通 过 阅 读 理 解 系 统 监 控 程 序 源 代 码 , 解 其 流 程 , 了
然后 加 入 相 应 的代 码 . 现 相 应 汇 编 指 令 . 过 交 叉 汇 实 通
将 R 3所 指 的 内存 单 元 的 内 容
编程序 A E S C对 修 改 过 的 监 控 程 序 进 行 汇 编 .生 成 新
O l Ol
0 0 01
O 0 00
10 00
00 00
蛐
一翱穗伽 6
_0
蛳嘿舶
指令 、摊作碣
N O l St X I Dt i 。 01 00 0 001
指 令 N O RS 的 微 程 序 由 一 条 微 指 令 组 成 . X R D . R
实现 的功能是/D OS 一D 属于 A组指令 。 ( R R) R,
指 令 S M R[R WR D , 1的 微 程 序 由 四 条 微 指 令 组 S 成 , 于 D组 指 令 实 现 的 功能 是 : 属
①D —Q R ②s —A ③ME — D ④Q R R M R —ME M
要 写 入 7 片 控 制 器 存 储 器 芯 片 MP OM1 R MP OM7的 内容 如 表 1所 示 R
将 扩 展 的指 令 用 于 程 序 中进 行 验 证 输 入 以下 汇
编程 序 :
表 1
雏t l a M1 l l M l ̄I PU
从 运 行 结 果 看 .汇 编 程 序 涉 及 到 的 寄 存 器 的 值 完 全 正 确 . 们 可 以得 出扩 展 指 令 正 确 的结 论 我
蛐噍 舶H
¥ 4" 1 、捧作 码 1
HI O! DI l L ,S
截地
址
下址
C3 l 心
2S .WRM DR [R】 功 能 : R 与【R】 值 互换 。 , S D S 的 RET
:
结 束返 回
运行前寄存器的值 :
R0=02 0 R 1 0 =FF R2= 00 R3 00 CF OO =0 0 S P=2 80 7 PC= 2 000 R6=0 0 R7:0 H0 R8= 00 R9= H0 R1 00 0D 00 00D O=FF FF R 1 =0 0 R 1 =00 R 1 =FB7F R1 =23 6 R 1 FF 00 1 2 oo 3 4 7 5= FF
> 0 0 g2 0
; 行 运
运 行 后 各 寄存 器 的值 :
R0= 2 0 R1= F F R2= 00 F C ABAB R3= 0 0 S 2 8 2 5 P= 7 0
PC =2 0 R6=5 0o 555 R7 = 78 R8=5 8 R9=0 0 R 1 = 56 67 00 0 FFFF Rl1= 0O R 1 0o 2=o0 0 R 1 FB7 0 3= F R 1 4=23 6 R 1 7 5: FF FF
sC c3
一O
9
0 O 10
01 O0
0 2—0 1
0 0 01
O l 01
- ^ -S
I 8
—
6
S 5 3 BI —
ll l1
1 0 O0
01 00 00 01
8Ⅱ O
3H 0
O0 H
0 l 0 1
l 0 11
0 O 00
0 000
1 1 O 1
00 00
S I 豫 , Sl WM 【i l
01 00 0 00 1
8B 6
OH O
OH 0
3H 0
l1 10
l1 1O
O 1 01
0 0 00
0 0 0 0
O 0 0 0
010 O
0 01 0
00 00
0O 10
O l ll
O 0 01
10 O1
的监 控 程 序 .然 后 对 新 系统 的 机 器 指 令 和 汇 编 指 令 进 行 验 证
:
将 1 6进 制 数 0 0 送 人 寄存 器 11
20 OA : NX0R R6. R2
:
将R 6的 值 与 R 2的 值 相 同或 .
3 具 体 扩 展 指 令 的 实现
我们具体扩展 了 2条机器指令 : 1 X R D , 功能 : D OS — D ; . O RS N R / R R) R (
R8
指 令 合 理 地 分 配微 地 址 . 以便 把 它 们 写进 控 制 存 储 器 C 并 保证正确地读 出次序 . 到用微 指令正确地 “ M. 达 解
释 执 行 ” 一 条 机 器 指 令 的 设 计 要 求 。 制信 号 装 入 对 每 控 应 的 7片 MP OM 中 . 定 指 令 的 操 作 码 . 指 令 的 操 R 确 将
2 0 MVRD R2 AB 0 2: ’ AB
:
将1 6进 制 数 AB B送 人 寄 存 A
器 R2
2 4: VRD 00 M R3,05 2 0 R3
将 1 6进 制 数 2 5 0 0送 人 寄 存 器
作 码 以 及 微 程 序 入 口地 址 . 入 MA R M 中。 装 PO
实 践 与经 验
/
/
控 制 命 令 字 段 两 大 部 分 的 内容 组 成 。 定微 指 令 格 式 , 确
完成 T C 20 E 一 0 0机 指 令 执 行 步 骤 设 计 .然 后 为 所 有 微
>a 2 00 0
2 0 M R 85 7 ; 1 0 0: V D R 6 8 将 6进 制 数 5 7 6 8送 入 寄 存 器