异步电动机软启动简析
浅谈异步电动机软启动
可靠性 的进一步提 高 , 未来成为主流产品软起动装置 将是带有软
参考 文 献
[R锦波, 1' ]I 张承慧, 电机与拖动第一版D 等. 清华大 学 出版社 ,0 6 20. I李晓钢. 2 1 异步电动机晶闸管软起动器的应用探讨 串接电抗器起动、_ Y △起动、自藕变压器将压起动、 电力半导体开关是无电弧开关和电流连续的调 企业技术开发,0 6( ) 2 0 ,8. 所 能够 延边三角形起动。而对绕线式交流电动机, 常采用转 节 , 以电子 软起动器是 无级调节 的 , 连续稳定 【 甫荣, 3 除 交流异步电动机软起动技N M. 家电力 I I  ̄ 子串接频敏变阻器起动、 转子串电阻分级起动。但这 调节电机的起动, 而传统起动的调节是分档的, 即属 公 司热工研 究院 些传统的起动方法都存越一些问题。 于有级 调节范围。 [黄俊 , 4 】 王兆安. 电力电子变流技术第三版 机械 定子 串接电阻起动: 由于外 串 了电阻 , 在电阻 上 冲击转矩和 冲击 电流小。软起动器在起 动电机 工业 出版社 . 0 1 2 0. 有较 大的有功损耗 , 别对中型 、 特 大型异 步电动机 更 时 , 是通过逐 渐增大 品闸管的导通角 , 电机 起动 电 使 不经济, 因此在降低了起动电流的同时、 却付出了较 流限制在设定值以内, 因而冲击电流小 , 也可控制转 为氧气与工件碎屑或磨料相混和时可能发生强烈的 级 的精度 和没有缺陷的表面 。 细磨料在 旋转轮 的约 微 化学反应, 此外, 压缩气体要经过过滤和干燥, 以除去 束下和工件表面接触, 通过控制旋转轮的运动就可以 油和水分; 喷射 1 1 工要在防尘罩内或在吸力足够的吸 得到十分理想的加工精度。 弹性发射加工利用游离磨 尘器 附近 进行 。 料和工件表层材料原子相结合, 然后在加工液动压力 2 弹性发目力工 . 7 于日 和剪切应力的作用下 , 磨粒离开结合表面, 从而实现 弹性 发射 加工 (l t nsi cii ) Ea i E fs nMahnn 是 对工件的微去I 口 弹性发射力 工和传统的加工方 sc i o g 锄 工。 Ⅱ 由日 Mo 在 17 本 r i 96年发明的” 原子级尺寸加工方 法相比有以下两个显著的特点: 加工机床的刚度比传 法“ 。其加工系统是由 旋转轮、 加工液和工件组成。 工 统自由工方法要求低; 勺日 加工过程不受温度变化和机l 禾 件和旋转轮都浸口在加工液中, 旋转轮通常是由聚氨 振 动的影 响。根据力12 1 条件( 2 1 磨料尺寸 、 硬度、 介质黏 加 工液由水 和微细磨 料 度 、 旋转 轮速度 、 加工液 剪切应力 、 工时间 、 向载 加 法 ( 亚微 米或 几十个纳米 ) 和而成 , { 昆 通过控制法 向载荷 荷 大小 ) 和工件材料 的不同 , 可获得纳米级 精度 和表 使旋转轮 和工件之阎 的问隙在 1左右 ,当旋转轮 旋 面粗糙度值, 没有热损伤和表面变质层。 转时 , 旋转轮与工件之间的楔形间隙 就『成 了类 似于 髟 3游离磨粒加工技术 的发展趋势 科学的发展, 采用特殊材料的机床将具有更高的精度 和稳定性。 电子学的进步则使机床控制技术得以极大 提高。这些都使材料的去除量达到纳米级成为可能。 利用场效应辅助抛光是游离磨粒加工的另一发展趋 势。通过控制工件所受的加工压力来操纵材料的去 除, 最终达到弱力乃至微力加工是提高超光滑表面加 工效率 的— 条重 要途径。 4结束语。随着科学技术的进步, 开发出越来越 多的新型材料,对材料的加工精度要求也越来越高。 游离麝粒 加工技术作为一种精密加工技术 , 其具有的 独特优 势使其可 以
软启动方式
软起动的起动方式软起动器的功能主要是实现软起动和软停车,而软停车相当于是软起动的逆过程。
三相异步电动机软起动器拥有多种起动模式,可以满足不同的起动要求。
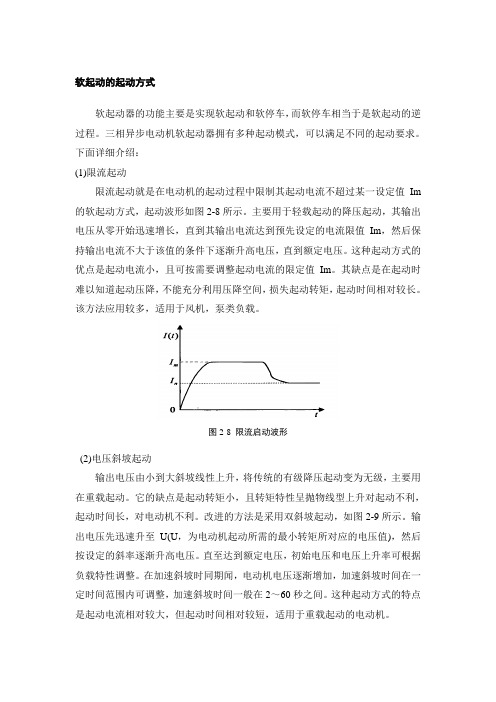
下面详细介绍:(1)限流起动限流起动就是在电动机的起动过程中限制其起动电流不超过某一设定值Im 的软起动方式,起动波形如图2-8所示。
主要用于轻载起动的降压起动,其输出电压从零开始迅速增长,直到其输出电流达到预先设定的电流限值Im,然后保持输出电流不大于该值的条件下逐渐升高电压,直到额定电压。
这种起动方式的优点是起动电流小,且可按需要调整起动电流的限定值Im。
其缺点是在起动时难以知道起动压降,不能充分利用压降空间,损失起动转矩,起动时间相对较长。
该方法应用较多,适用于风机,泵类负载。
图2-8 限流启动波形(2)电压斜坡起动输出电压由小到大斜坡线性上升,将传统的有级降压起动变为无级,主要用在重载起动。
它的缺点是起动转矩小,且转矩特性呈抛物线型上升对起动不利,起动时间长,对电动机不利。
改进的方法是采用双斜坡起动,如图2-9所示。
输出电压先迅速升至U(U,为电动机起动所需的最小转矩所对应的电压值),然后按设定的斜率逐渐升高电压。
直至达到额定电压,初始电压和电压上升率可根据负载特性调整。
在加速斜坡时同期闻,电动机电压逐渐增加,加速斜坡时间在一定时间范围内可调整,加速斜坡时间一般在2~60秒之间。
这种起动方式的特点是起动电流相对较大,但起动时间相对较短,适用于重载起动的电动机。
图2-9 电压斜坡启动波形(3)转矩控制起动主要用于重载起动,如图2-10所示。
它是按照电动机的起动转矩线性上升的规律控制输出电压。
其优点是起动平滑、柔性好、对拖动系统有利,同时减少对电网的冲击,使最优的重载起动方式。
其缺点就是起动时间较长。
图2-10 转矩控制启动波形(4)转矩加突跳控制起动转矩加突跳控制起动与转矩控制起动一样,也是用在重载起动的场合。
所不同的是在起动的瞬间用突跳转矩,克服拖动系统的静转矩,然后转矩平滑上升,可缩短起动时间。
鼠笼型三相异步电动机传统启动与软启动的优缺点
鼠笼型三相异步电动机传统启动与软启动的优缺点一、前言随着国民经济的飞速发展,科学技术的日新月异,钻井设备的更新与发展,对电气配套设备的技术要求也越来越高。
软启动控制系统得到了广泛的应用。
如:水站配电柜、高低压移动变电站、无人值守泵站、无人值守供热站、各种遥控调度系统、生产作业自动化等等。
这正是国家实现科学技术现代化的重要标志,也是每一个技术人员肩负的重要责任。
软启动技术的应用,给我们提出了很多要求。
如电网的波动性,执行机构的智能配套等,都要求越来越严格。
作为重要驱动执行机构的电动机来说,它的控制方式受到广大技术人员的高度重视。
既要为智能控制打下良好基础,又要降低电动机起动时对电网的冲击。
所以,不得不在电动机的起动设备上做工作。
鼠笼型异步电动机电子硬启动器的问世给技术人员化解了这个问题。
它既能够发生改变电动机的再生制动特性维护拖曳系统,更能够确保电动机可信再生制动,又能够减少再生制动冲击,而且备有计算机通讯USB同时实现智能控制。
二、电动机再生制动方式的挑选传统启动装置与软启动装置的优缺点:电动机传统启动方式有自耦预热、y/△预热、延边△预热及串成电抗器预热(磁控式),其共同特点就是掌控线路直观,启动转矩不容调并存有二次冲击电流,对功率存有冲击转矩。
例如电网电压上升可能会导致万萨县。
上述方式在停机时均为瞬间动作,例如并无机械缓冲器装置可以对有关设备导致损毁。
硬启动装置存有下特点:1)降低电机启动电流和配电容量,避免增容投资。
2)降低启动机械应力,延长电机及相关设备的寿命。
3)启动参数可视负载调整,以达到最佳启动效果。
4)多种启动模式及保护功能,易于改善工艺、保护设备。
5)备有外控端子,可方便实现异地控制或自动控制。
6)全数字开放式操作显示键盘,操作灵活简便。
7)高度集成的intel微处理器控制系统,性能可靠。
8)小电流无触点交流控制器无级调压,调压范围阔、负载能力弱。
9)产品可以用做频密或不频密启动。
软启动器的工作原理分析

(1)无冲击电流。软起动器在起动电机时,通过 逐渐增大晶闸管导通角,使电机起动电流从零线 性上升至设定值。
(2)恒流起动。软起动器可以引入电流闭环控制, 使电机在起动过程中保持恒流,确保电机平稳起 动。
(3)根据负载情况及电网继电保护特性选择,可 自由地无级调整至最佳的起动电流。
6、软起动器在起动时报故障,软起动器不工作,电机 没有反应。故障原因可能为: a-电机缺相(检查电机和外围电路) b-软起动器内主元件可控硅短路(检查电机以及电网电 压是否有异常。和厂家联系更换可控硅) c-滤波板击穿短路(更换滤波板即可) d-控制板问题更换控制板
◆ 软起动器过热保护: 温度升至80℃士5℃时保护动作,动作时间 <0.1 秒;当温度降至55℃时(最低),过热保护解除。 ◆ 输入缺相保护:滞后时间: <3秒
◆ 输出缺相保护:滞后时间: < 3秒 ◆ 三相不平衡保护:滞后时间: < 3秒,以各相电流偏差 大 于 50%士10%为基准 ◆ 起动过流保护:起动时持续大于电机额定工作电流5倍 时保护动作。
2、起动报缺相故障,软起动器故障灯亮,电机没反应。 出现故障的原因可能是: a-起动方式采用带电方式时,操作顺序有误(正确操作顺 序应为先送主电源,后送控制电源)。 b-电源缺相或者三相电末上,软起动器保护动作(检查电 源) c-软起动器的输出端未接负载(输出端接上负载后软起动 器才能正常工作) d-控制板有问题更换控制板
在工程中最常用的就是三相异步电机,由于 其电机启动特性,这些电动机直接连接供电系统 启动(硬启动),将会产生高达电机额定电流5 -7 倍的浪涌(冲击)电流,使得供电系统和串 联的开关设备过载。另一方面,直接启动,也会 产生较高的峰值转矩,这种冲击不但会对驱动电 动机产生冲击,而且也会使用机械装置受损;还 会影响接在同一电网上其他电气设备正常工作。 鼠笼型异步电动机电子软启动器的诞生解决了这 个问题。它既能改变电动机的起动特性保护拖动 系统,更能保证电动机可靠起动,又能降低起动 冲击 ,因此随着电力电子技术的快速发展,智能 型软起动器将会得到更广泛的应用。
软启动器的工作原理分析

软启动原理:
在三相电源与电机间串入三相并联晶闸管,利用晶闸 管的移相控制原理,改变晶闸管的触发角,启动时电 机端电压随晶闸管的导通角从零逐渐上升,电动机逐 渐加速,直到晶闸管全导通,电动机工作在额定电压 的机械特性上,实现平滑启动,降低启动电流,避免 启动过流跳闸。待电机达到额定转数时,启动过程结 束,软启动器自动用旁路接触器取代已完成任务的晶 闸管,为电动机正常运转提供额定电压。此外软启动 器还可以实现软停车,停车时先切断旁路接触器,然 后由软启动器内晶闸管导通角由大逐渐减小,使三相 供电电压逐渐减小,电机转速由大逐渐减小到零,停 车过程完成。
等故障。
软起动时起动电流大幅度降低,以上影响可完全免除。
⒊ 伤害电机绝缘,降低电机寿命
①大电流产生的热量反复作用于导线外绝缘,使绝缘 加速老化、寿命降低。
②大电流产生的机械力使导线相互摩擦,降低绝缘寿 命。
③高压开关合闸时触头的抖动现象会在电机定子绕组 上
产生操作过电压,有时会达到外加电压的5倍以上,这 样 , 高的过电压会对电机绝缘造成极大伤害。
(3)转矩控制起动。它是将电动机的起动转矩由小 到大线性上升,它的优点是起动平滑,柔性好,对 拖动系统有更好的保护,它的目的是保护拖动系统, 延长拖动系统的使用寿命。同时降低电机起动时对 电网的冲击,是最优的重载起动方式,它的缺点是 起动时间较长。
软启动典型控制图
软启动器接线图
软启动的特点:
(1)无冲击电流。软起动器在起动电机时,通过 逐渐增大晶闸管导通角,使电机起动电流从零线 性上升至设定值。
(2)恒流起动。软起动器可以引入电流闭环控制, 使电机在起动过程中保持恒流,确保电机平稳起 动。
三相异步电机的启动及软启动
三相异步电机的软启动08机械(0816401057)章志鹏苏州大学应用技术学院摘要三相异步电机因具有结构简单,知道方便,运行可靠,价格低廉等优点,而广泛应用在工业,农业,交通运输业,国防工业及其他各行业中。
但是它也有明显的缺点,那就是起动转矩小,起动电流过大。
这种情况对电机本身及周围电网都有非常不利的影响。
为了减小异步电机启动过程对电网的冲击,改善异步电机的起动特性,本文对三相异步电机的软启动进行讨论。
本文首先阐述三相异步电机的各种起动方式及其主电路和控制电路图,并对其分析。
得出各自优缺点。
找出能在满足电动机起动转矩要求及降低电流的前提下是电机能够平稳可靠启动。
关键词:异步电动机;软启动AbstractThree-phase asynchronous motor because of its simple structure, know convenient, reliable operation, price is low wait for an advantage, is widely used in industry, agriculture, transportation, national defense industry and other industries. But it also has the obvious shortcomings, that is starting torque small, starting current is too big. This kind of situation of motor itself around and have a power grid unfavorable influences. In order to reduce asynchronous motor for the impact of the power grid startup process, improve the asynchronous motor start characteristics, this paper the three-phase asynchronous motor soft start are discussed.This paper expounds the three-phase asynchronous motor start-up mode and its various main circuit and control circuit, and its analysis. Draw their respective advantages and disadvantages. Find out in motor can meet the requirements starting torque and reduce the current is the premise of motor can smooth and reliable start.Keywords: asynchronous motor; Soft start第一章绪论第1.1节研究背景与现状三相异步电机发展至今得到了广泛的应用,其性能和功率也不断的提高,电压也从低压发展到高压。
浅议电动机软启动技术及应用

启动电压降也很大 , 以受电网和供 电设备条件 的限制 ,这种方法仅在 所 容量较小 的系统中采用 。而采用传统 的降压启动可在一定程度上改善启 动性能。传统的降压启动 主要有以下几种方法 ;Y△启动 :这种方法适 / 用正常运行时定子绕组采用 △ 接法 的电机 。定子有六个接头引出端 ,接 到转换开关上 ,启动时采用Y 接法 ,启动完毕后再 切换成 △接法 。启动 电压为2 0 , 2 V 运行电压为3 0 。这种启动设备的优点在 于星形启动电流 8V 只是原来三角形的1 ,启动电流特性好 , , 3 结构简单、价格低 、启动过程 中消耗能量少 。缺点是启动转矩也相应下降为原来三角形接法的1 ,转 , 3 矩特性差 ,有二次 电流冲击 , 设备故障率高,需要经常维护 , 以不宜 所 使用在频繁起停的设备上 ,因而本启 动方式适用于电网电压30 额定 8V, 电压60 / 0 Y A接法的电动机轻载启 动的场合 ;自 6 V3 V, / 8 耦变压器减压启 动 :三相 自 耦变压器高压边接 电网,低压边接 电机 。一般有几个 中心抽 头,可选择不同的电压 比,以适应不同启 动转矩 的负载 ,在电机启动完 毕后将其切 除。其优点是启动电压可 以 选择 , . 、0 或0 U u 为 如O 5 . . e( e 6 8 9 额定 电压 ),以适应不同负载 的要求。缺点是体积大 ,重量重 ,且要消 耗较多的有 色金属 ,故障率高 ,维修费用 高,这种启动方式主要应用于 较大容量的电动机 ,以减小启动 电流对电网的影响 。而传 统的降压启动 虽然能够减小启动电流,但启动电流仍然很大 ,还会引起大 的启动电压 降 ,且在切换至全压运行 时,存在二次冲击 ,对 电机、配电系统形成冲 击 ,对机械负载有冲击转矩 ,且受电网电压波动的影响,一旦出现电网 电压向下浮动 ,会造成 电机堵转、启 动困难 。在停止技术上 ,传统的方 法是断电 自 然停车 ,由于 电机上电压突然撤去 ,电机的转矩突然变化 , 又由于惯性作用 , 必然会给电机、机械设备等带来不利影响。因此 , 传 统的启 动 ( 停止 ) 方法迫切需要改进 。近年来出现的软启动和软停止技 术 ,通过控制加在电动机上的电压 和电流 ,使电机的电气性能与负载的 电器特 f相近甚至 吻合 ,减小了启动 、停止时对 电网的电气冲击和对负 生
关于异步电动机软启动的浅析与研究
关 键词 : 步电动机 ; 启动 器; 异 软 晶闸管
Ke r s n u t n moo ; o tr;h rso y wo d :i d ci tr sf sa tt y it
文 献 标 识 码 : A
文 章 编 号 :0 6 4 1 ( 00)0 0 0- 1 1 0 - 3 2 1 3 —2 4 0 1
・
2 4・ 0
警 竺 璺
价值 工程
些
关于异步 电动机软启动 的浅 析与研 究
An l i nd Re e r h y hr no o o f t r a yssa s a c ofAs nc o usM t r So t S a t
王 欣 W a gXi n n
1 电 动机 传 统 的 启 动 方式 启动 ; 根据 负载 情况及 电网继 电保 护特 性选 择 , 自由地无级调 ④ 可 传 统 的 启 动 方式 通 常 有 两 种 一种 是在 额 定 电压 下 的直 接 启 动 整至最佳的启动电流 , 节省能源 ⑤这种软启动器体积最小 , 一台开 方式 , 一种 是 降 压 启 动 方 式 。 另 关柜 能放多台这种启动器 , 节省工程造价 , 且故 障率 与维修费用较 11直 接 启 动 直 接 给 电动 机 加 上 额 定 电压 使 之 启 动 ,也 称 全 低 。 . 压 启动 , 然 这 种 方 法 简 单 经 济 , 启 动 电流 大 就 像 上 述 所 说 的会 虽 但 同时 , 此软启动器还可 以通 过工业控制 总线联网 , 利用计算机 加 重 电网 的 负荷 以及 会 给 机械 设 备 带来 冲 击 、 坏 等 。 损 进 行 远 程监 控 , 自动 化 智 能控 制 打 下 良好 的 基础 。 为 12降 压 启 动 ① 丫一 转换 器 : 种 方法 适 用 于 正 常运 行 时 定 . △ 这 4 软 启 动 器 的 基 本 功 能 子 绕 组 采 用 三角 形 接 法 的 电动 机 。 子 有 六 个 接 头 引 出 接 到转 换 开 定 随着 电 力 电子 元 器 件 的发 展 , 异步 电机 的软 启动 技 术 已经 日趋 关 上 , 动 时 采 用 星形 接 法 , 动 完 毕 后 再 切 换 成 三 角 形接 法 。 动 成 熟 , 功 能 也 越来 越 多 。 因 此 , 独 立 研 发 ~ 套 软 启 动 设 备 , 先 启 启 启 其 要 首 电压为 2 0 运行 电压 为 3 0 。这种启动设 备的优 点是启动设备 要对软启动器 的基本功能进行研究 , 实现 当前市场上软启动器 的 2 V, 8V 并 简单 , 启动过程 中消耗能量少。 缺点是有二次电流冲击 , 设备故 障率 大 部 分功 能 。 高, 需要经常维护, 以不宜使用在频繁启动的设备上。 自耦 变压 所 ② 41斜坡 电压 启动功能 斜坡 电压 软启 动是最 常见的软启动方 . 器 降压 启 动 : 相 自耦 变 压 器 高 压 边 接 电网 , 压 边 接 电动 机 , 般 法 。 电机 启 动 过 程 中 , 三 低 一 在 电机 的定 子 电压 线 性 增加 直 至 全 压 , 始 电 初 有几个分接头 , 可选择不 同的 电压 比 , 相对于不 同启动转矩 的负载。 压 可根据负载的大小预先设置 , 电压上升 的速率可调 , 图 2所示。 如 在 电动机 启动 后再 将 其切 除 。其 优 点是 启 动 电压 可 以选 择 , 如 42 限流 启 动 功 能 在 某 些场 合 对 电机 的启 动 电 流 有着 严 格 的 06 U . N及 08 N, 5 . U 以适应不 同负载的要求。缺点是体积大 , 重量重 , 要 求 , 因此 在 电机 启 动 过 程 中 需 要 对 电机 的最 大 启 动 电流 进 行 限 且 要消耗较多有色金属 , 故障率 高, 维修费用高。 ③对于绕线式异步 制 , 具体 的 限流 量 值 可 根 据 不 同的 电机 预 先 设 置 。 限 流 软 启动 在 满 电动机 的启动 ,可在 转子绕组 串接频敏变阻器或水 电阻实现启动 , 足 限流条件的前提下 , 逐渐增大 电机的输入 电压 , 直至达到全 电压 ; 待 启 动 完成 后再 将 其 切 除。 但 频 敏 变 阻 器 成 本 高 , 水 电阻 损耗 又 电压 的调 节 速 率 , 而 即启 动 时 间 也 可预 先设 置 。 大。 43软 停 车 电机 停 车 时 ,传 统 的 控 制 方式 都 是 通 过 瞬 间 停 电 . 2 晶 闸管 调 压 原 理 分 析 完成的 , 电机 处 于 自 由停 车 方 式 。 有许 多应 用 场 合 , 由停 车 的 断 但 自 软 启动 概 念 启 源 于 美 国 马 歇 尔 航 天 中 心 , 它是 一 种 采 用 电 力 电 点 方式是 不允许 的 , 如 : 例 高层 建筑 、 大楼 的水泵系统 , 如果瞬 间停 子 技 术 、 制 技 术 和 微 处理 器 技 术 等 多 种技 术综 合 而 成 的 全新 电机 机 会 产 生 巨 大 的 “ 锤 ” 应 , 管 道 甚 至 水 泵 道 到 损 坏 。 为减 少和 控 水 效 使 水 效应 , 要 电机 逐 渐停 机 , 小 转 矩 和 水 速 的波 动 , 需 减 即软 启动控制方式。 软启动器一般将三 对反并联 的晶 闸管 串联 在电机 的 防 止 “ 锤 ” 主 回路当中作为开关元器件, 依靠 晶闸管的通断来控 制电机定子端 停车方式。采用软启动器恰恰能满足这一要求 , 泵站中应用软停 在 的 电压 。 它 可 以通 过 控 制 晶 闸 管 的触 发 角 来 改 变 电机 的 输 入 电压 , 车技术可以减 少维修费用和维修工作 量。 并 在 电机 启 动 过 程 中 , 着 电机 转 速 的变 化 按 照 适 当 的原 则 调 节 触 随 歙 启动器 中的软停车功能是 , 晶闸管在 得到停机指令后从全导 发 角 , 电机 在 启动 电流 很 小 的前 提 下 平 稳 地 启 动 。 采 用 晶 闸管 调 通 逐 渐地 减 小导 通 角 , 过 一 定 时 间过 渡 到 全 关 闭 的过 程 。停 车 的 使 经 压 电路 控 制 电机 的启 动 , 方面 解 决 了 电压 连 续 可 调 的 问 题 , 一 时 间根 据 实 际需 要 可 在 0 10 调 整 。 一 另 ~ 2s 方 面 可省 去 接 触 器 、 电器 等 换 挡 硬 开 关 , 小 了启 动 设 备 的体 积 。 继 减 般 来 讲 , 多数 不 需要 交流 调 速 的场 合都 可 以利 用 软 启 动 器 大 而 且 还 能 以此 为 基 础 ,开 发 出其 它 降压 启 动 电 路 无 法 实 现 的 新 功 来 实 现 异 步 电动 机 的 启 动 。 目前 , 电子 软 启 动 器 应 用 范 围 是 交 流 能 , 如 : 普 通 的 三相 异步 电动 机 进 行 节 能控 制 , 使 其 在 轻 载 时 3 0 6 0 电机 功 率 从 几 千 瓦 到 8 0千 瓦 。 例 对 可 8 ~ 6 V, 0 国内外有很多科研机 构和 公司都对 电动机软启动器 进行 了深 消耗较少的能量 ,尤其对于那 些长期工作于轻载状 态下 的电机 , 如 采油机等设备 , 采用此功能将会获得 巨大的经济效益。 入 的研 究 和 开 发 工 作 。 国 外 的研 究 工 作 开 始 较 早 , 2 从 0世 纪 7 0年 3 晶闸管软启动器的特点 代就陆续有文章发表 , 至今 已经有大量产品上市。虽然诸多国 内公 并 目前 的晶闸管软 启器是一种集 电机 软启动、 软停机 、 轻载 节能 司都 有 智 能 电动 机 软 启 动控 制器 的 产 品 上 市 , 占有 了一 定 的 市 场 但在 技 术 和 市 场 占有 上 还 是 同 国外 公 司有 很 大 差 距 。 如 何 能 和 多种保护功能于一体 的新型 电机控制装置 , 是最先进也是最流行 份 额 , 的异步 电机软启动控 制器。相比较于传统 的启动 方式( 串联 电抗 把软启动控制器做 的简单、 如 经济 、 可靠、 耐用并具有优 秀的启动性能 器 / 电阻 , 一 水 Y △变 换 等 )其 突 出 的优 点 体 现 在 : 电子软
浅谈异步电动机的软起动

.
①如过电流保护 、 过压保护 、 单项接地保护 、 上下
口断 相保 护 、 三相不 平衡 保护 、 相位 颠倒 保护 等 。 带 不
过载保 护 的 , 须另 加热 继 电器保 护 。 必
单、 价格较 低 、 作方 便 的软启 动器 。对 于 大型 风机 、 操
2 0 .1CHI A ME 0 81 N CE NT 7
r
C ONT ROL& W EI GHT计 量 与控制
应用 时要特 别注意 . 图 3所示 见
() 5 电压 控制 起 动 用 在轻 载 起 动 的场 合 , 保 在
,
缩了 时 短动 起间
.
证起 动压 降下发挥 电动机 的最大起 动转 矩 , 可 能的 尽
流 3 0 60 , 8 V(6 V) 电机 功 率从 几 千瓦 到 8 0 W 。软起 0k
动器特别 适用 于各 种泵类 负载 或风 机类 负载 , 需要 软
起动 与软停 车的场 合 。同样 对于变 负载 工况 、 电动 机
图3 转矩 加 突跳 控 制起 动示 意 图
长期 处于轻 载运行 ,只有短 时或 瞬间 处于重 载场 合 ,
电机 的寿命 和保护 了用 电线路 和负载 。目前在市 场上
/ ,
一
~ ~ 一 一 一
/
,\ I
… 一 一 — 一 一 ~ 一
\
~
{
I
I
.
I
l 【
l
o
t 1
t 2
图 软停车示意图 4
中 国水 泥 2 0 1 0 8 1
异步电动机软启动控制

异步电动机软启动控制交流异步电动机软启动技术成功地解决了交流异步电动机起动时电流大,线路电压降大,电力损耗大以及对传动机械带来的破坏性冲击等问题。
交流电动机软起动装置对被控电动机既能起到软起动,又能起到软制动作用。
交流电动机软起动是指电动机在起动过程中,装置输出电压按一定规律上升,被控电动机电压有起始电压平滑地升到全电压,其转速随控制电压变化而变化发生相应的软性变化,即由零平滑地加速至额定转速的全过程,称为交流电动机软起动。
交流电动机软制动是指电动机在制动过程中,装置输出电压按一定规律下降,被控电动机电压由全电压平滑地降到零,其转速相应的由额定值平滑地减至零的全过程。
交流电动机软起动装置的功能特点交流电动机软起动装置具有如下的功能特点:1.起动过程和制动过程中,避免了运行电压、电流的急剧变化,有益于被控制电动机和传动机械,更有益于电网的稳定运行。
2.起动和制动过程中,实施晶闸管无触点控制,装置使用长,故障事故率低且免检修。
3.集相序、缺相、过热、起动过电流、运行过电流和过载的检测及保护于一身,节电、安全、功能强。
4.实现以最小起始电压(电流)获得最佳转矩的节电效果。
三相异步电动机起动控制线路为了减小起动电流,在电动机起动时必须采取适当措施。
将分别介绍笼型感应电动机和绕线转子感应电动机限制起动电流的控制线路。
笼型感应电动机起动控制线路笼型感应电动机限制起动电流常采用降压起动的方法,即启动时将定子绕组电压降低,起动结束将定子电压升至全压,使电动机在全压下运行。
降压起动方法很多,如定子串电阻降压起动;定子串电抗器降压起动;定子串自耦变压器降压起动;星三角降压起动等。
无论哪种方法,对控制的要求是相同的,即给出起动指令后,先降压,当电动机接近额定转速时再加全压,这个过程是以起动过程中的某一变化参量为控制信号自动进行的。
在起动过程中,转速、电流、时间等参量都发生变化,原则上这种变化的参量都可以作为起动的控制信号。
三种异步电动机软启动方式
的计算,输出晶闸管的触发信号,通过控制晶闸管的导通角,使启动器 按所设计的模式调节输出电压,以控制电动机的启动过程。当启动i 寸程
采用星形接法,启动完毕后再切换成三角形接法。这种启动设备的优点
是启动设备简单,启动过程中消耗能量少:缺点是有二次电流冲击,设 备故障率高,需要经常维护,因此在频繁启动的设备上不宜使用。在转
科技凰
三种 异步电动机 软启动 方式
张明和黄秀成
( 佳木斯电业局,黑龙江佳木斯154000)
1“4 F
m
~h
‘‘喃要】本文主要阐述了三种异步电动机的传统降压启动方式,新型电子式祆启动器以及变频软启动方式等问飙
{, |‘I
侈
搠
ห้องสมุดไป่ตู้
】
异
步
电
动
机;
降
压
启
动
方
式
;
电
子式
软
启
动
器
;
变
频
软启
动’{
,…,
,。.. ,.,. 。 1j 。
换i 翻呈中,由于瞬变电势和电动柳剩磁产生的电势i 推与电源电压有相
完成后,—般启动器将旁路接触器吸合,短路掉所有的晶闸管,使电动 机直接投入电网运行,以避免不必要的电能损耗。软启动器的控制框图 如图1所 示:
位差,严重时会产生电压相加,引起过大的冲击电流和电磁转矩,因此 大大地限制了它的使用。由于启动电压为运行电压的1,,启动转矩为额 定转矩的1/3,因此只能用在空载 或轻载(负 载率小于1/ 3) 启动的 设备上。在电动机轻载或空载运行时,也可利用该启动设备做降压运 行,以提高电动机的功率因数和效率。2) 自耦变压器降压启动。三相 自耦变压器( 也称补偿器) 高压边接电网,低压边接电动机,—般有几 个分接头,可选择不同的电压比。相对于不同启动转矩的负载,在电动 机启动 后再将其 切除。其 优点是启 动电压可 以选择, 如0.65UN、 oBUN或Q9UN,以适应不同 负载的要求。其缺 点是体积和重量 大,且 要消耗较多的有色金属,故障率高,维修费用高。3) 磁控软起动器。 磁控软起动器是利用控磁限幅调压的原理,在电动机启动过程中电压可 由—个较低的值平滑地上升到全压值,使电动机轴上的转矩匀速增加, 启动特性变软。并可实现软停车。但其启控电压固定,用户不可调整, 会有较大的电流冲击,且体积大。4) 高压电动机,可在定子线路中串 联电抗器或水电阻实现降压启动,待启动完成后再将其切除:但电抗器 成本高,水电阻损耗又较大。5) 绕线式异步电动机,可在转子绕组串 接频敏变阻器或水电阻实现启动,待启动完成后再将其切除;但频敏变 阻器成本高,而水电阻损耗又大。其他还有延边三角形启动、定子串电 阻启动等方法。尽管各种传统式降压启动方法各有其优缺点,但它们有 —个 共同 的优点 ,即没 有谐波 污染 。
异步电动机的软起动

异步电动机的软起动【摘要】三相异步电动机的起动电流高达额定电流的5~8倍,对电网造成较大干扰,尤其在工业领域中的重载起动,有时可能对设备安全构成严重威胁。
利用软起动技术不仅实现在整个起动过程中无冲击而平滑地起动电动机,而且可根据电动机负载的特性来调节起动过程中的参数,如限流值、起停时间等,以达到最佳的起停状态。
【关键词】电动机;软起动1 前言三相异步电机由于结构简单、控制维护方便、性能稳定、效率高等优点而被广泛地应用于各种机械设备的拖动中。
因其直接起动时产生的冲击电流对电网及其负载造成冲击,同时由于起动应力较大,使负载设备的使用寿命降低,因此常采用降压起动方式来减少影响。
但是,传统的降压起动方式,如星三角起动、自耦变压器起动等,要么起动电流和机械冲击过大,要么体积庞大笨重、损耗大,要么起动力矩小、维修率高等等,都不尽人意。
随着电子技术的发展,使用软起动器可以无冲击而平滑地起动电动机,而且可根据电动机负载的特性来调节起动过程中的参数达到最佳的起停状态,从而延长机械设备的使用寿命,减少设备的维修量,提高经济效益。
2 软起动的基本原理软起动是指运用串接于电源与被控电机之间的软起动器,控制其内部晶闸管的导通角,使电机输入电压从零以预设函数关系逐渐上升,直至起动结束,赋予电机全电压的起动方法。
软起动器是一种集电机软起动、软停车、轻载节能和多种保护功能于一体的新颖电机控制装置,它的主要构成是串接于电源与被控电机之间的三相反并联晶闸管及其电子控制电路,通过运用不同的方法,控制三相反向并联晶闸管的导通角,使被控电动机的输入电压按不同的要求而变化,就可实现不同的功能。
如图(一)所示。
图(一)基本原理图目前使用的软起动器,基本上是以单片机作为中央控制器控制核心来完成测量及各种控制算法,用程序软件自动控制整个起动过程。
它通过单片机及相应的数字电路控制晶闸管触发脉冲的迟早来改变触发角的大小,从而改变晶闸管的导通时间,最终改变加到电动机三相绕组的电压大小。
软启动器工作原理及应用详解
导读软启动是指电机的电压由零慢慢提升到额定电压,这样电机在启动过程中的启动电流,就由过去过载冲击电流不可控制变成为可控制。
并且可根据需要调节启动电流的大小。
电机启动的全过程都不存在冲击转矩,而是平滑的启动运行。
本期专题将对软启动器的工作原理和应用进行全面解析。
软启动的必然性在工程中最常用的就是三相异步电机,由于其电机启动特性,这些电动机直接连接供电系统启动(硬启动),将会产生高达电机额定电流5~7倍的浪涌(冲击)电流,使得供电系统和串联的开关设备过载。
另一方面,直接启动也会产生较高的峰值转矩。
这种冲击不但会对驱动电动机产生冲击,而且也会使机械装置受损,还会影响接在同一电网上的其他电气设备正常工作。
鼠笼型异步电动机电子软启动器的诞生解决了这个问题。
它既能改变电动机的启动特性保护拖动系统,更能保证电动机可靠启动,又能降低启动冲击。
因此,随着电力电子技术的快速发展,智能型软启动器将会得到更广泛的应用。
软启动器的工作原理软启器采用三相反并联晶闸管作为调压器,将其接入电源和电动机定子之间。
这种电路如三相全控桥式整流电路。
使用软启动器启动电动机时,晶闸管的输出电压逐渐增加,电动机逐渐加速,直到晶闸管全导通,电动机工作在额定电压的机械特性上,实现平滑启动,降低启动电流,避免启动过流跳闸。
待电机达到额定转速时,启动过程结束,软启动器自动用旁路接触器取代已完成任务的晶闸管,为电动机正常运转提供额定电压,以降低晶闸管的热损耗,延长软启动器的使用寿命,提高其工作效率,又使电网避免了谐波污染。
软启动器同时还提供软停车功能,软停车与软启动过程相反,电压逐渐降低,转速逐渐下降到零,避免自由停车引起的转矩冲击。
▲软启动器的典型控制图▲软启动器接线图直接启动的危害性(1)引起电网电压波动交流电动机在全压直接起动时,起动电流会达到额定电流的4~7倍,当电机的容量相对较大时,该起动电流会引起电网电压的急剧下降,影响同电网其它设备的正常运行。
三相异步电动机软启动方式
三相异步电动机的软启动方式摘要:本文介绍三相异步电动机的传统启动方式和新型无触点恒流启动方式,通过对“硬启动”和“软启动”的性能优劣分析对比,阐述新启动技术的各种优越性。
电动机软启动器以其控制方式灵活简便,对供电系统和电气设备冲击小且控制元件不易损坏以及维护方便等诸多优点正逐步取代传统的启动方式。
关键词:硬启动软启动电气原理图在众多生产领域中,由于三相异步电动机具有结构简单、运行可靠、维修简便、价格适宜等特点,在电力拖动机械中有 90% 以上是由三相异步电动机驱动的。
按常规惯例,对较大容量的三相异步电动机的启动,一般均采用星—角启动、电抗器启动或者是自耦减压启动。
这几种启动方式由于技术比较成熟,所以目前在工农业生产中仍然在大范围的应用。
但是不管采用什么方式启动,由于三相异步电动机的启动电流瞬时会形成一个很高的冲击电流,(直接启动电流值是电动机额定电流的 4 ~ 8 倍) 这给供电设备或电网中的电源电压在一定范围内形成短暂的降压现象,而且电动机的容量愈大,造成这种现象也就愈严重。
同时由于是硬性启动也会给供电系统和电气设备造成一定的伤害。
中大功率的三相异步电动机启动问题由来已久,电气技术人员一直在试图找出一种能够彻底解决问题的办法。
随着科学技术的飞速发展和计算机控制技术的日趋成熟,近年来一种以计算机为核心,采用双向可控硅为主控回路的智能化新型控制器“电动机软启动器”已经在工业生产领域中崭露头角 ,它以控制方式灵活简便,对供电系统和电气设备冲击小且控制元件不易损坏以及维护方便等诸多优点正逐步取代传统的控制装置。
1电动机软启动的工作原理1.1工作原理三相异步电动机软启动装置又称无触点恒流启动,它在电动机与输入电源之间串接一组大功率的双向可控硅,由控制电路采用电子智能化控制改变可控硅的导通角,使电动机电压平稳增加,并将电动机的启动电流控制在电动机额定电流值的 1 ~ 2.5 倍之间,并连续可调,这样就会减轻冲击电流对电动机及供电设备或者电网的损害,改善了供电系统的稳定性。
软启动器原理和介绍
软启动器专题1 、什么是软启动器软起动器是一种集电机软起动、软停车、轻载节能和多种保护功能于一体的新颖电机控制装置,国外称为Soft Starter。
它的主要构成是串接于电源与被控电机之间的三相反并联闸管交流调压器。
改变晶闸管的触发角,就可调节晶闸管调压电路的输出电压。
在整个起动过程中,软起动器的输出是一个平滑的升压过程(且可具有限流功能),直到晶闸管全导通,电机在额定电压下工作。
运用不同的方法,控制三相反并联闸管的导通角,可以使被控电机的输入电压按不同的要求而变化,就可实现不同的功能。
软启动的外形:2、为什么要使用软启动器现在传动工程中最长用的就是三相异步电动机。
在许多场合,由于其启动特性,这些电机不可以直接连接电源系统。
如果直接在线启动,将会产生电动机额定电流6倍的浪涌电流,该电流可以使供电系统和串联开关设备过载。
如果直接启动,也会产生较高的峰值转矩,这种冲击不但对驱动电机有冲击,而且也会使机械装置受载。
例如,辅助动力传动部件。
为了降低启动电流,应使用启动辅助装置,如启动用电抗器或自耦变压器。
但是该方法只可以逐步降低电压,而软启动器通过平滑的升高端子电压,可以实现无冲击启动。
可以最佳的保护电源系统以及电动机。
同时软启动器可以实现软停车,它的过程和启动过程相反,晶闸管在得到停机指令后,从全导通逐渐地减小导通角,经过一定时间过渡到全关闭的过程。
停车的时间根据实际需要可在0 ~ 120s调整。
电机停机时,传统的控制方式都是通过瞬间停电完成的。
但有许多应用场合,不允许电机瞬间关机。
例如:高层建筑、大楼的水泵系统,如果瞬间停机,会产生巨大的“水锤”效应,使管道,甚至水泵遭到损坏。
为减少和防止“水锤”效应,需要电机逐渐停机,即软停车,采用软起动器能满足这一要求。
在泵站中,应用软停车技术可避免泵站的“拍门”损坏,减少维修费用和维修工作量。
3、软启动器工作原理和主接线图软启动器的工作原理:控制其内部晶闸管的导通角,使电机输入电压从零以预设函数关系逐渐上升,直至起动结束,赋予电机全电压,即为软起动,在软起动过程中,电机起动转矩逐渐增加,转速也逐渐增加。
高压大功率异步电动机软启动性能的研究

l t n Th o to t o fe i n tn h o q e p la i n i p o u e n h o ts a tn o t o f t e ai . ecnrl o me h d o l mi a i g t e t r u u s t s r d c d a d t e s f t r ig c n r lo h o
c s a u r nti e lz d on t ntc r e s r a ie .A c or n t he e to ie,he h g po e i l vo t g s nc r c dig o t t s n s t t i h— w r m dde— la e a y h ono o or us m t c n sa ts e d l n e ibl t h e t pe s f t r e . a t r t a iy a d r la y wih t e n w y o ts a t r
Absr c : n w yp gh vo tge s tsa t r b s d on t e lm i— ur e r ns o m e a ntod e T h ta t A e t e hi — la of tr e a e h i tc r ntta f r rw s i r uc d. e vo tge oft o ors s aori o i ousy c n d by c la he m t t t sc ntnu l ha ge ontoli hefrng a l fS r lng t ii ng e o CR nd t of t r s a hes ts a ti r aie A tt e s m etm et t tng pe f m a eoft of t r e sf l n l z d by e e i e nd sm u— e l d. h a i he sari ror nc he s ts a t ri uly a a y e xp rm nta i z
异步电机的软启动技术探讨
() 2 接触器旁路工作模式。在电动机达到满速运行时, 用旁 路接触器来取 代已经完成启动 任务的软启动器 ,这样可 以降低晶闸 管的热损耗,提高系统的效率,这种工作模式下,有可能用一台软 启动器去启动多台电动机 。 ( 节能运 行模式 。当 电动 机负 荷较轻 时 ,软启动 器 自动降 3) 低施 加在电动机定予上 的电压 ,减少 了电机电流励磁分量 ,从而提 高 了电动机 的功率因数 。 ( )调压调速模 式 。软启动 器既然 是用 晶闸管调压原 理来实 4 现的 ,它就 可以作 调压调速运 行 ,由于 电动机 转子 内阻很 小 , 得 要 到大范围的 调速 ,就需要在 电动机 转子 中串入适 当的电阻 。
动 方式的不 同之 处 :
11 电 子 软 启 动 器一 般 有 以 下 几 种 启 动 方 式 .
( ) 流软 启动 。限流软 启动就是 在 电动机 的启动过 程 中限 1 限 ( ) 冲击 电流 。软启 动器在 启动 电机 时 ,通过 逐渐增 大晶 1 无 制其启动电流不超过某一设定值( 的软启动方式。主要用在轻载 闸管导 通角 ,使 电机 启动电流从零线性上 升至设定值 。 I m) 启动的负载的降压启动 ,其输出 电压从零开始迅速 增长 ,直到其输 ( 恒流 启动 。软 启动 器可 以引入 电流 闭环控制 , 电机在 2) 使 出电流达 到预 先设定 的 电流限值 I m,然 后在保 持输 出 电流 II < m的 启动过程 中保持恒流 .确保 电机平稳启动 。 条件下逐 渐升 高 电压 ,直到 额定电压 ,使 电动机转速 逐渐升高 ,直 ( ) 据负 载情况及 电 网继 电保护 特性选 择 ,可 自由地无级 3 根 到 额定转速 。这 种启 动方式 的优 点是 启动 电流小 ,且可 按需 要调 调整至最佳 的启动 电流 。 整 ,对 电网影 响小。其缺点是 在启 动时难以知道启动压 降 ,不能充 3 结 语 分利用压降空 间 ,损失启动转矩 ,启动时间相对较长 。 综上所述 ,软 启动器的启动方 式及独特功能 是其他 降压启动方 ( )电压双斜坡启 动 输 出电压 先迅速升至ul 2 ,ul 电动机 为 式 不能比拟的 , 必将得到越 来越 广泛地应用 。 它 启动所 需的最 小转 矩所对 应 的 电压 值 .然 后按 设定 的速 率逐 渐升 压 ,直至 达到额定 电压 ,初始 电压 及电压 上升 率可根据 负载特 性调 参考 文献 整。这种启动方式的特点是启动电流相对较大.但启动时间相对较 短 ,适用于 重载启动的 电动机 。 ( ) 跳启动 。启动 的瞬 间加以突跳 ,让晶 闸管在 极短 的时 3 突 间内大角度导通 用以克服拖动 系统 的静阻力然后 回落,再按原设定 的值 线性上 升 ,进入 恒流 启动 ,适用 于重载 并克服 摩擦 的 启动场
浅谈IGBT异步电动机软启动器的应用与发展
用, 其 独 特 的 技 术优 势 在 某 些领 域 得到 充 分 的展 示 。 本 文 通 过 阐 述 异 前 对 主回 路 的故 障 进行 全方 位 的诊断 和维修 , 在 一定 程 度 步 电动 机 的 启动 现 状 , 同 时对 软 启 动 的特 点和 发 展 方 向进 行 分析 , 并 介 绍 了相 关 的 I G B T软 起 动 器 等 , 进而在一定程度上为 I GB T异 步 电 动 机软 启 动器 的应 用 和 发展 提 供 参 考 依据 。 关键词 : 异 步 电动 机 交 流调 压 软 启 动
浅谈 I GB T异步 电动机 软启 动器 的应 用与发展
朱剑 ( 邯 郸市 孙庄采矿有限公司 )
摘要 : 当前, 异 步 电动机 在 国 内外 的 各 个 生产 领 域 得 到 广 泛 的 应
2 . 5 通过 微机 进行 控 制 , 在 一定 程度 上在 电动机 起 动
上数 字化控 制具有 静态 特性 , 并且 这种 特性 比较稳定 。 进而在 一定 程度上为 自动化控制奠定基础和提供保 证。
2 . 6 软起动器还能够通过计 算机 通讯进行直接 的控制 ,
电动机 作 为一 种 动力 装 置 , 在工业、 农 业 生 产过 程 中 得 到广 泛的运 用 。在 过去 , 直流 电动机其 调 速一 直 占统治
ห้องสมุดไป่ตู้
3 软起 动的发 展 方 向 ( 短期 展 望 : 软 起动 将仍 然 以各种 形 式 的降压 ( 限流 )
地位 , 受 本 身结 构 的影 响和 制 约 , 对于 现代 生 产 向高速 大 软 起动 的主 流。 容量 化 发展 的需 要 , 该 电动机在 一定 程度 上 难 以满足 。 交 4 l GB T软起 动器 流 电动机 在工 业 生产过 程 中得 到广 泛使 用 , 同时在 工 业生 l GB T ( I n s u l a t e d Ga t e B i p o l a r T r a n s i s t o r ) , 绝 缘 栅 双 产 过程 中发 挥难 以企 及 , 难 以代 替 的作 用 , 这些都是因为 极 型功率管 , 作 为复 合全控 型 电压驱 动式 电力 电子 器件 , 通 交流 电动 机 自身 的优 势 引起 的。交流 电动机 的优 势主 要表 常情 况下 由 B J T ( 双 极 型 三极 管) 和 MOS f 绝缘 栅 型场 效应 现在 结 构 简 单 、 坚 固耐 用 , 惯量小 , 可靠 性 高 等 , 这 些优 点 管) 两 部 分共 同组 成 , 并且 在 一定 程度 上 , 在 高输 入 阻抗 方 在 三相 鼠笼式 异步 电动 机 中表 现 的尤为突 出。 面 MOS F E T比较优越 ,在低 导通压 降 方面 G T R表现 的 比 1 软启动 现状 分析 较 突 出。 通常情况下 , G T R优势 主要表现 为 : 饱和 压 降低 , 载 1 . 1 定子 串接 电阻起动 : 该 起动 方式就 是在 电动机 中 , 流密度 大 , 但驱动 电流较 大 ; 对于 MOS F E T来说 , 其优势 主 接入 相应 的外 串 电阻。由于外 串 电阻 的接入 必 然会增 加 有 要表现 为 : 驱动 功率 非常 的小 , 开 关速 度较 快 , 但 导 通压 降 功损 耗 , 在 中、 大 型异 步 电动机 中 , 这种 有功 损耗表 现 的 尤 大, 载流 密度小。通 过对 两种器件 的优 点进行综合 , 进 而在 为突 出 , 而且 非常严 重。 定程 度上形 成 了 I GB T , 驱动功 率小而饱 和压 降低 。对于 1 . 2 Y —A起 动 : 该 启动 方式 简单 , 在 启 动 电动 机 的过 交流 电机 、 变频器 、 开关 电源、 照 明 电路 、 牵 引传动 等直流 电 程 中只 是通 过 转换开 关。 通过 Y 一 △起 动 方式起 动 电动机 压 超过 6 0 0 V的变流 系统来说 非常适合。 基于 I G B T的异步 的过 程 中 ,需要 从 电动机 定子 绕组 中引 出六个 出线端 , 进 电机软起 动器具 有触发信 号容 易实现 、 控 制简单 、 不产生低 而在 一定 程度 上 增加 了处理 高 电压 电动 机 的难度 ,所 以 , 次谐波 的特 点。在 开 关速度 方面 , I GB T要低 于 MOS F E T , 该启 动 方式主 要应 用于 3 8 0 V 电动机。 但明显高于 G T R。 在关 断 I GB T的过程 中 , 不需要通过 负栅 1 . 3 自耦 变压 器将 压 起动 : 该 起 动 方式 与定 子 串接 电 压 的方式减 少关 断时间 ,但是随 栅极和 发射极 并联 电阻 的 抗 器 起 动相 比 , 在 限定 起 动 电流 相 的 同时 , 损 失 较 少 的 起 增加 关断时间也 会相 应 的增加 。 在 电机起动 时 , 仅需 要改变 动转矩; 与 Y —A起 动相 比 , 可 以选 用几 种 抽头 , 进 而具 有 触发信 号 的 占空 比就 能够调 节 施加在 电机 定子 上 的 电压 , 定 的 灵活 性 , 尤 其 是功 率 比较 大 时 , 可 以拖 动 较 大 的 负 从 而改 变起 动 电流 的特性 。 当开 关器件 的开关频 率远 大于 载进 行相 应 的起动 。 系统频率 时 , 能够消 除在 起动过 程 中的低 次谐波 。 1 . 4 延边 三角形 起动 : 对于 鼠笼 式 异步 电动机来 说 , 通 5 总结 过 采用 延边 三角 形进行 起动 。 迄今 为 止 ,市 场 上 占主 流 地 位 的还 是 晶 闸 管软 起 动 2 软启 动的特 点 器, 因为其 在价 格 上有 很大 的优 势。 但 因为 晶 闸管器件 的 2 . 1 电力半导体开关通常情况下是 无 电弧开 关, 并且在 半控 性 , 使 得 它 产生 大 量 的低 次谐 波 、 电流 不连 续 。 随 着 定 程度上 能够对 电流进行连 续 的调 节 , 通 常情况 下 , 电子 I GB T器 件价 格 的不 断下 降 ,凭借其 性 能上 的优 点 ,基 于 软起动器都 是无级调 节的 , 能够连 续稳定调 节 电机的起动。 I GB T的异步 电机软 起动器 将 会得到 广泛 的运 用。 2 . 2 冲击 转 矩和 冲 击 电流 小 。在 起动 电机 的过程 中 , 参考文献 : 软 起动器 是 对 晶 闸管 的导 通 角进行 逐渐 的增 大 , 进 而在 一 [ 1 1 李 志斌 , 李安 华. 异 步 电动 机 软 启 动 分 析 f J 】 . 应用 能源技 术 , 定程度上 , 在 设定 值 以 内对 电机 起 动 电流 进行 限制 , 所 以 2 0 0 9 ( 1 0 ) .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Park 方程,编制异步电动机软启动暂态仿真程序试验原理:根据同步电机在d,q,0坐标系统的基本关系式,我们将a,b,c 坐标系的电压和电流转化到d,q,0坐标系统,其转化关系如下:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⋅⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+----+-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c b a q d i i i i i i 313131)32sin(32)32sin(32sin 32)32cos(32)32cos(32cos 320πγπγγπγπγγ (1)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⋅⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+-+----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡01)32sin()32cos(1)32sin()32cos(1sin cos i i i i i i q d c b a πγπγπγπγγγ (2) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⋅⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+----+-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c b a q d u u u u u u 313131)32sin(32)32sin(32sin 32)32cos(32)32cos(32cos 320πγπγγπγπγγ (3) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⋅⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+-+----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡01)32sin()32cos(1)32sin()32cos(1sin cos u u u u u u q d c b a πγπγπγπγγγ (4)由式(1)~(4)式可将a,b,c 变量转换到d,q,0变量。
在本次试验中软启动采用变频软启动技术,电压与频率的关系如下如所示。
fNf minf minU NU U图 1 恒压频比控制原理图在电机启动的整个过程中,通过调节电机的频率来调节电机的转速,但在调节点电压频率的同时为防止磁通的饱和,还需要相应地调节电压的幅值,调节关系如图所示。
试验数据:异步电动机容量Sn=2200VAR;电压Un=380V;频率f=50.0Hz;定子电阻Rs=7.092;定子漏感Lls=0.03879;归算到定子侧的转子电阻Rrp=9.3184;归算到定子侧的转子漏感Llrp=0.03879;互感Lm=0.776319;转动惯量J=0.089;极对数p=2;试验方案:本试验通过三种试验方案的对比:第一种试验方法,启动的负载为额定负载,供电电压为额定电压,频率为额定频率,即全压启动。
第二种试验方法,电压的频率在启动时低于额定频率,然后随着转速的上升,逐渐增加频率,在增加频率的过程中增加的步长为定值,在这里起始频率为20Hz,频率增加的步长为0.0127Hz,确定频率的初始值以及频率的增加步长的依据是启动电流始终不超过额定电流的3倍。
第三种试验方法,对第二种试验方法进行改进,由于第二种方法中频率始终是增加的,为了启动电流不超过额定电流的3倍,步长被限定的很小。
导致启动的速度减慢,为了提高启动的速度,应该增加步长,所以在第三种方法中步长分为正步长和负步长,这样可以增加步长,提高频率的上升速度。
通过实时的计算定子电流的有效值,当没达到上限时采用正步长,当达到上限时采用负步长,并且为了迅速的将电流将达允许的范围之内,在这里负步长是正步长的两倍。
试验中频率起始值为25Hz,正步长为1Hz,负步长为-2Hz。
试验波形:00.51 1.52 2.51000T/sn /m i n直接启动转速变化曲线00.51 1.52 2.51000T/sn /m i n定步长软启动转速变化曲线00.511.522.51000T/sn /m i n双向步长软启动转速变化曲线图2 电动机转速变化曲线00.51 1.52 2.5495051T/sf /H z直接启动电压频率变化曲线00.51 1.52 2.5204060T/sf /H z定步长软启动电压频率变化曲线00.511.522.5204060T/sf /H z双向步长软启动电压频率变化曲线图 3 电压频率变化曲线00.20.40.60.81 1.2 1.4 1.6 1.8-20020T/sI /A直接启动定子A 相电流00.20.40.60.81 1.2 1.4 1.6 1.8-20020T/sI /A定步长软启动定子A 相电流00.20.40.60.81 1.2 1.4 1.6 1.8-20020T/sI /A双向步长软启动定子A 相电流图4 电动机定子A 相电流变化曲线0.511.522.5-10-505T/sI /A直接启动定子电流d 轴分量00.51 1.52 2.5-20020T/sI /A定步长软启动定子电流d 轴分量00.511.522.5-20020T/sI /A双向步长软启动定子电流d 轴分量图 5 定子电流d 轴分量变化曲线0.511.522.5-20-100T/sI /A直接启动定子电流q 轴分量00.51 1.52 2.5-20020T/sI /A定步长软启动定子电流q 轴分量0.511.522.5-20020T/sI /A双向步长软启动定子电流q 轴分量图 6 定子电流q 轴分量变化曲线0.511.522.50510T/sI /A直接启动转子电流d 轴分量00.51 1.52 2.5-20020T/sI /A定步长软启动转子电流d 轴分量00.511.522.5-20020T/sI /A双向步长软启动转子电流d 轴分量图 7 转子电流d 轴分量变化曲线00.51 1.52 2.51020T/sI /A00.51 1.52 2.5-20020T/sI /A定步长软启动转子电流q 轴分量00.511.522.5-20020T/sI /A双向步长软启动转子电流q 轴分量图 8 转子电流q 轴分量变化曲线00.51 1.52 2.512x 104T/sP /W直接启动输入的有功功率00.511.522.5-101x 104T/sP /W定步长软启动输入的有功功率00.511.522.5-202x 104T/sP /W双向步长软启动输入的有功功率图 9 输入功率变化曲线00.51 1.52 2.5-20020406080T/sT o r q u e /N .m0.511.522.5-1000100T/sT o r q u e /N .m定步长软启动转矩变化曲线0.511.522.5-2000200T/sT o r q u e /N .m双向步长软启动转矩变化曲线图10 电磁转矩变化曲线0.20.40.60.81 1.2 1.4 1.61.82-5000500T/sU /V直接启动定子线电压变化曲线0.20.40.60.81 1.2 1.4 1.61.82-5000500T/sU /V定步长软启动定子线电压变化曲线0.20.40.60.81 1.21.41.61.82-5000500T/sU /V双向步长软启动定子线电压变化曲线图 11 定子电压变化曲线00.51 1.52 2.5268.7006268.7006268.7006T/sU /V直接启动定子电压d 轴分量0.511.522.5-5000500T/sU /V定步长软启动定子电压d 轴分量00.511.522.5-5000500T/sU /V双向步长软启动定子电压d 轴分量图 12 定子电压d 轴分量变化曲线00.51 1.52 2.5-466-465-463T/sU /V直接启动定子电压q 轴分量0.511.522.5-5000500T/sU /V定步长软启动定子电压q 轴分量00.511.522.5-5000500T/sU /V双向步长软启动定子电压q 轴分量图 13 定子电压q 轴分量变化曲线通过上述波形可见,采用直接全载启动时启动电流过大,对电机造成很大的损害,频率定步长启动时,虽然启动电流限制在安全的范围内,但是启动时间相对过长达到稳态大约需1.5s,而采用双向步长启动时可以克服全载启动和定步长启动的缺点,可以使启动时间缩短到1s,同时保证启动电流在安全范围之内。
参考程序:直接启动参考程序Sn=2200;Un=380;f=50.0;nn=1500.0;Rs=7.0942;Lls=0.03879;Rrp=9.3184;Llrp=0.03879;Lm=0.776319;J=0.089;p=2;Tm=10.0;um=Un/sqrt(3.0)*sqrt(2.0);Ls=Lls+Lm;Lr=Llrp+Lm;A=[Ls 0 Lm 0;0 Ls 0 Lm;Lm 0 Lr 0;0 Lm 0 Lr;];A_inv=inv(A);ws=2*pi*f;ts=0.001;isdc=0.0;isqc=0.0;irdc=0.0;irqc=0.0;wr=0;gama=0;for m=1:2500t=(m-1)*ts;ff(m)=f;ua=um*sin(ws*t);ub=um*sin(ws*t-2.0*pi/3.0);uc=um*sin(ws*t-4.0*pi/3.0);uab=ua-ub;ubc=ub-uc;uca=uc-ua;usdc=2.0/3.0*(uab*cos(gama)+ubc*cos(gama-2.0*pi/3.0)+uca*cos(gama+2.0*pi/3.0));usqc=-2.0/3.0*(uab*sin(gama)+ubc*sin(gama-2.0*pi/3.0)+uca*sin(gama+2.0*pi/3.0));urdc=0;urqc=0;U=[usdc usqc urdc urqc]';I=[isdc isqc irdc irqc]';wsl=ws-wr*p;B=[Rs -ws*Ls 0 -ws*Lm; ws*Ls Rs ws*Lm 0;0 -wsl*Lm Rrp -wsl*Lr; wsl*Lm 0 wsl*Lr Rrp]; PI_0=A_inv*U-A_inv*B*I;I1_ts2=I+PI_0*ts/2.0;PI1_ts2=A_inv*U-A_inv*B*I1_ts2;I2_ts2=I+PI1_ts2*ts/2.0;PI2_ts2=A_inv*U-A_inv*B*I2_ts2;I1_ts=I+PI2_ts2*ts;PI1_ts=A_inv*U-A_inv*B*I1_ts;I_ts=I+ts/6.0*(PI_0+2.0*PI1_ts2+2.0*PI2_ts2+PI1_ts);isdc=I_ts(1);isqc=I_ts(2);irdc=I_ts(3);irqc=I_ts(4);Te=1.5*p*Lm*(isqc*irdc-isdc*irqc); pwr=(Te-Tm)/J;wr=wr+pwr*ts;if wr<0.0wr=0.0;endgama=gama+ws*ts;if gama>2*pigama=gama-2*pi;endIsdc_out(m)=isdc;Isqc_out(m)=isqc;Irdc_out(m)=irdc;Irqc_out(m)=irqc;Usdc_out(m)=usdc;Usqc_out(m)=usqc;N(m)=wr*60/(2*pi);isa(m)=isdc*cos(gama)-isqc*sin(gama);isb(m)=isdc*cos(gama-2*pi/3)-isqc*sin(gama-2*pi/3); isc(m)=-isa(m)-isb(m);uaabb(m)=uab;Torque(m)=Te;p_active=(usdc*isdc+usqc*isqc);p_reactive=(usdc*isqc-usqc*isdc); P(m)=1.5*p_active;Q(m)=1.5*p_reactive;endm=1:4:2500figure(1)subplot(3,1,1)plot((m-1)*ts,Isdc_out(m))hold onfigure(2)subplot(3,1,1)plot((m-1)*ts,Isqc_out(m))hold onfigure(3)subplot(3,1,1)plot((m-1)*ts,Irdc_out(m))hold onfigure(4)subplot(3,1,1)plot((m-1)*ts,Irqc_out(m))hold onfigure(5)subplot(3,1,1)plot((m-1)*ts,Usdc_out(m))hold onfigure(6)subplot(3,1,1)plot((m-1)*ts,Usqc_out(m))hold onfigure(7)subplot(3,1,1)plot((m-1)*ts,N(m))hold onfigure(8)subplot(3,1,1)plot((m-1)*ts,isa(m))hold onfigure(9)subplot(3,1,1)plot((m-1)*ts,Torque(m)) hold onfigure(10)subplot(3,1,1)plot((m-1)*ts,P(m))hold onfigure(11)subplot(3,1,1)plot((m-1)*ts,ff(m))hold onfigure(12)subplot(3,1,1)plot((m-1)*ts,uaabb(m)) hold on定步长软启动参考程序Sn=2200;Un=380;nn=1500.0;Rs=7.0942;Lls=0.03879;Rrp=9.3184;Llrp=0.03879;Lm=0.776319;J=0.089;p=2;Tm=10.0;um=Un/sqrt(3.0)*sqrt(2.0); Ls=Lls+Lm;Lr=Llrp+Lm;A=[Ls 0 Lm 0;0 Ls 0 Lm;Lm 0 Lr 0;0 Lm 0 Lr;];A_inv=inv(A);ts=0.001;isdc=0.0;isqc=0.0;irdc=0.0;irqc=0.0;isa=0.0;isb=0.0;isc=0.0;f=20;wr=0;gama=0;ws=2*pi*f;ftep=0.0217;ppppp=0;sum=0;constant=2;Ie=2;ws0=2*pi*50;count=floor(1.0/f/ts);for m=1:1:2500f=f+ftep;if f>50f=50;endff(m)=f;ws=2*pi*f;t=(m-1)*ts;ua=(um*f/50)*sin(ws*t);ub=(um*f/50)*sin(ws*t-f*2.0*pi/(3.0*50));uc=(um*f/50)*sin(ws*t-f*4.0*pi/(3.0*50));uab=ua-ub;ubc=ub-uc;uca=uc-ua;usdc=2.0/3.0*(uab*cos(gama)+ubc*cos(gama-2.0*pi/3.0)+uca*cos(gama+2.0*pi/3.0)); usqc=-2.0/3.0*(uab*sin(gama)+ubc*sin(gama-2.0*pi/3.0)+uca*sin(gama+2.0*pi/3.0)); urdc=0;urqc=0;U=[usdc usqc urdc urqc]';I=[isdc isqc irdc irqc]';wsl=ws-wr*p;B=[Rs -ws*Ls 0 -ws*Lm; ws*Ls Rs ws*Lm 0;0 -wsl*Lm Rrp -wsl*Lr; wsl*Lm 0 wsl*Lr Rrp]; PI_0=A_inv*U-A_inv*B*I;I1_ts2=I+PI_0*ts/2.0;PI1_ts2=A_inv*U-A_inv*B*I1_ts2;I2_ts2=I+PI1_ts2*ts/2.0;PI2_ts2=A_inv*U-A_inv*B*I2_ts2;I1_ts=I+PI2_ts2*ts;PI1_ts=A_inv*U-A_inv*B*I1_ts;I_ts=I+ts/6.0*(PI_0+2.0*PI1_ts2+2.0*PI2_ts2+PI1_ts);isdc=I_ts(1);isqc=I_ts(2);irdc=I_ts(3);irqc=I_ts(4);Isdc_out(m)=isdc;Isqc_out(m)=isqc;Irdc_out(m)=irdc;Irqc_out(m)=irqc;Usdc_out(m)=usdc;Usqc_out(m)=usqc;isa(m)=isdc*cos(gama)-isqc*sin(gama);isb(m)=isdc*cos(gama-2*pi/3)-isqc*sin(gama-2*pi/3);isc(m)=-isa(m)-isb(m);uaabb(m)=uab;N(m)=wr*60/(2*pi);p_active=(usdc*isdc+usqc*isqc);p_reactive=(usdc*isqc-usqc*isdc); P(m)=1.5*p_active;Q(m)=1.5*p_reactive;Te=1.5*p*Lm*(isqc*irdc-isdc*irqc); Torque(m)=Te;pwr=(Te-Tm)/J;wr=wr+pwr*ts;if wr<0.0wr=0.0;endgama=gama+ws0*ts;if gama>2*pigama=gama-2*pi;endendm=1:4:2500;figure(1)subplot(3,1,2)plot((m-1)*ts,Isdc_out(m)) hold onfigure(2)subplot(3,1,2)plot((m-1)*ts,Isqc_out(m)) hold onfigure(3)subplot(3,1,2)plot((m-1)*ts,Irdc_out(m)) hold onfigure(4)subplot(3,1,2)plot((m-1)*ts,Irqc_out(m)) hold onfigure(5)subplot(3,1,2)plot((m-1)*ts,Usdc_out(m)) hold onfigure(6)subplot(3,1,2)plot((m-1)*ts,Usqc_out(m)) hold onfigure(7)subplot(3,1,2)plot((m-1)*ts,N(m))hold onfigure(8)subplot(3,1,2)plot((m-1)*ts,isa(m))hold onfigure(9)subplot(3,1,2)plot((m-1)*ts,Torque(m)) hold onfigure(10)subplot(3,1,2)plot((m-1)*ts,P(m))hold onfigure(11)subplot(3,1,2)plot((m-1)*ts,ff(m))hold onfigure(12)subplot(3,1,2)plot((m-1)*ts,uaabb(m)) hold on 双向步长软启动参考程序Sn=2200;Un=380;nn=1500.0;Rs=7.0942;Lls=0.03879;Rrp=9.3184;Llrp=0.03879;Lm=0.776319;J=0.089;p=2;Tm=10.0;um=Un/sqrt(3.0)*sqrt(2.0); Ls=Lls+Lm;Lr=Llrp+Lm;A=[Ls 0 Lm 0;0 Ls 0 Lm;Lm 0 Lr 0;0 Lm 0 Lr;];A_inv=inv(A);ts=0.001;isdc=0.0;isqc=0.0;irdc=0.0;irqc=0.0;isa=0.0;isb=0.0;isc=0.0;f=25;wr=0;gama=0; ws0=2*pi*50;ftep=1;ppppp=0;sum=0;constant=3.5;Ie=3count=floor(1.0/f/ts);for m=1:1:2500if f>50f=50;endff(m)=f;ws=2*pi*f;t=(m-1)*ts;ua=(um*f/50)*sin(ws*t);ub=(um*f/50)*sin(ws*t-f*2.0*pi/(3.0 *50));uc=(um*f/50)*sin(ws*t-f*4.0*pi/(3.0 *50));uab=ua-ub;ubc=ub-uc;uca=uc-ua;uaabb(m)=uab;usdc=2.0/3.0*(uab*cos(gama)+ubc*cos (gama-2.0*pi/3.0)+uca*cos(gama+2.0*pi/3.0));usqc=-2.0/3.0*(uab*sin(gama)+ubc* sin(gama-2.0*pi/3.0)+uca*sin(gama+2.0*pi/3.0));urdc=0;urqc=0;U=[usdc usqc urdc urqc]';I=[isdc isqc irdc irqc]';wsl=ws-wr*p;B=[Rs -ws*Ls 0 -ws*Lm;ws*Ls Rs ws*Lm 0;0 -wsl*Lm Rrp -wsl*Lr;wsl*Lm 0 wsl*Lr Rrp]; PI_0=A_inv*U-A_inv*B*I;I1_ts2=I+PI_0*ts/2.0;PI1_ts2=A_inv*U-A_inv*B*I1_ts2;I2_ts2=I+PI1_ts2*ts/2.0;PI2_ts2=A_inv*U-A_inv*B*I2_ts2;I1_ts=I+PI2_ts2*ts;PI1_ts=A_inv*U-A_inv*B*I1_ts;I_ts=I+ts/6.0*(PI_0+2.0*PI1_ts2+2.0 *PI2_ts2+PI1_ts);isdc=I_ts(1);isqc=I_ts(2);irdc=I_ts(3);irqc=I_ts(4);Isdc_out(m)=isdc;Isqc_out(m)=isqc;Irdc_out(m)=irdc;Irqc_out(m)=irqc;Usdc_out(m)=usdc;Usqc_out(m)=usqc;isa(m)=isdc*cos(gama)-isqc*sin(gama);isb(m)=isdc*cos(gama-2.0*pi/3.0)-isqc*sin(gama-2.0*pi/3.0); isc(m)=-isa(m)-isb(m);N(m)=wr*60/(2*pi);p_active=(usdc*isdc+usqc*isqc);p_reactive=(usdc*isqc-usqc*isdc); P(m)=1.5*p_active;Q(m)=1.5*p_reactive;Te=1.5*p*Lm*(isqc*irdc-isdc*irqc); Torque(m)=Te;pwr=(Te-Tm)/J;wr=wr+pwr*ts;if wr<0.0wr=0.0;endgama=gama+ws0*ts;if gama>2*pigama=gama-2*pi;endsum=sum+(isa(m))^2;if m==(ppppp+count)ppppp=m;ref=sqrt(sum/count);if ref>constant*Ief=f-2*ftepelsef=f+ftependif f>50f=50;endfor k=ppppp+1:ppppp+countiayx(k)=ref;endsum=0;count=floor(1.0/f/ts);endendm=1:4:2500figure(1)subplot(3,1,3)plot((m-1)*ts,Isdc_out(m))hold onfigure(2)subplot(3,1,3)plot((m-1)*ts,Isqc_out(m))hold onfigure(3)subplot(3,1,3)plot((m-1)*ts,Irdc_out(m)) hold onfigure(4)subplot(3,1,3)plot((m-1)*ts,Irqc_out(m)) hold onfigure(5)subplot(3,1,3)plot((m-1)*ts,Usdc_out(m)) hold onfigure(6)subplot(3,1,3)plot((m-1)*ts,Usqc_out(m)) hold onfigure(7)subplot(3,1,3)plot((m-1)*ts,N(m))hold onfigure(8)subplot(3,1,3)plot((m-1)*ts,isa(m)) hold onfigure(9)subplot(3,1,3)plot((m-1)*ts,Torque(m)) hold onfigure(10)subplot(3,1,3)plot((m-1)*ts,P(m))hold onfigure(11)subplot(3,1,3)plot((m-1)*ts,ff(m))hold onfigure(12)subplot(3,1,3)plot((m-1)*ts,uaabb(m)) hold on。