广东省重点领域研发计划2019年度现代工程技术重点专
汕尾市人民政府办公室关于大力发展装配式建筑的实施意见-

汕尾市人民政府办公室关于大力发展装配式建筑的实施意见正文:---------------------------------------------------------------------------------------------------------------------------------------------------- 汕尾市人民政府办公室关于大力发展装配式建筑的实施意见各县(市、区)人民政府,市政府各部门、各直属机构:为深入贯彻落实《国务院办公厅关于大力发展装配式建筑的指导意见》(国办发〔2016〕71号)和《广东省人民政府办公厅关于大力发展装配式建筑的实施意见》(粤府办〔2017〕28号)精神,加快推动我市装配式建筑发展,推进建筑产业现代化,促进建筑产业转型升级,特制定如下实施意见:一、总体要求(一)指导思想全面贯彻党的十九大精神,落实中央和省的决策部署,牢固树立“创新、协调、绿色、开放、共享”的发展理念,按照“适用、经济、安全、绿色、美观”的要求,大力发展装配式建筑,推动本市建造方式的创新,开创具有汕尾特色的建筑产业现代化发展新局面。
(二)基本原则1.坚持政府引导与市场主导相结合。
政府部门做好装配式建筑的规划引导、政策支持和市场培育工作,充分发挥市场在资源配置中的主导作用和企业的主体作用,形成有利的体制机制和市场环境,促进市场主体积极参与、协同配合,有序发展装配式建筑。
2.坚持示范引领与全面推进相结合。
发挥政府投资的保障性住房、公共建筑和市政工程项目等的示范带动作用,带动社会投资项目普及装配式建造。
结合本市实际分阶段、分步骤、分地区全面推进装配式建筑。
3.坚持科技进步与产业升级相结合。
用科技手段和信息技术推动传统建筑业转型升级,提高产业关联度和装配式建筑应用水平,实现规范化、标准化、专业化、精细化管理。
(三)适用范围本实施意见适用于本市行政区域范围内装配式建筑的实施推广工作。
汕头市人民政府关于印发进一步促进科技创新的若干政策措施的通知
汕头市人民政府关于印发进一步促进科技创新的若干政策措施的通知文章属性•【制定机关】汕头市人民政府•【公布日期】2019.05.28•【字号】汕府〔2019〕55号•【施行日期】2019.05.28•【效力等级】地方规范性文件•【时效性】失效•【主题分类】科技计划正文汕头市人民政府关于印发进一步促进科技创新的若干政策措施的通知汕府〔2019〕55号各区县人民政府,市政府各部门、各直属机构:《关于进一步促进科技创新的若干政策措施》已经市政府第十四届45次常务会议审议同意,现印发给你们,请认真组织实施。
汕头市人民政府2019年5月28日关于进一步促进科技创新的若干政策措施为深入贯彻习近平新时代中国特色社会主义思想,深入贯彻党的十九大和十九届二中、三中全会精神,深入贯彻习近平总书记对广东重要讲话和重要指示批示精神,进一步提升我市自主创新能力,促进科技创新推动高质量发展,根据广东省人民政府《关于进一步促进科技创新的若干政策措施》(粤府〔2019〕1号)有关要求,结合我市实际,制定如下措施。
一、主动融入粤港澳大湾区国际科技创新中心建设1.支持我市企业与粤港澳大湾区高校、科研院所共建研发机构或联合实验室,促进重大科技成果落地转化。
2.鼓励和支持我市高校、科研院所、企业在国际创新人才密集区和“一带一路”沿线国家设立研发机构,集聚全球高端创新资源。
3.积极对接粤港澳大湾区高校和科研机构,鼓励我市企业与粤港澳大湾区高校、科研院所联合承担基础研究和关键核心技术攻关等重大科技计划项目,以专项形式给予支持。
4.高校、科研机构和企业科技人员按需办理往来港澳多次商务签注,按上级规定给予办理期限最长、最优惠的多次签注;允许持优粤卡A卡的港澳和外籍高层次人才,申办1副港澳入出内地商务车辆牌证。
减轻在汕工作的港澳和外籍高层次人才税负负担,按实际负担情况给予一定数额的生活补助。
(市科技局、市委外办、市公安局、各区县政府负责)二、鼓励引进优质创新资源5.支持境内外知名高校、科研机构、世界500强企业、中央企业等来汕设立独立研发总部、区域研发中心或创新研究院,采取“一事一议”形式给予建设经费支持。
2019~2020年度广东省重点实验室申报指南

附件2019~2020年度广东省重点实验室申报指南专题一:学科类省重点实验室建设(专题编号:20191203)。
(一)专题背景。
学科类省重点实验室是高水平基础与应用基础研究重要平台,是聚集和培养优秀科技人才的重要基地。
学科类省重点实验室包括广东省重点实验室(学科类)和省市共建广东省重点实验室(学科类),其中省市共建广东省重点实验室(学科类)采用省市联动共建、地市投入为主的方式建设,为我省区域优势特色产业发展提供知识储备和技术支撑。
本专题围绕新一代信息技术、高端装备制造、绿色低碳、生物医药、数字经济、新材料、海洋经济、现代种业与精准农业、现代工程技术等战略性新兴产业发展需求及社会民生重大问题,建设学科类省重点实验室。
(二)申报要求。
1.建设基础要求。
重点实验室应围绕研究领域,聚焦研究方向和研究内容,近、中、远期目标清晰。
研究内容与已有省重点实验室不重叠。
其建设基础应符合以下要求:(1)实验室负责人应符合下述条件之一:A.2016~2018年主持过1项资助金额为200万元及以上的国家级基础类科研项目;B.2016~2018年主持过1项资助金额为300万元及以上的国家级研发类科研项目;C.2016~2018年主持过1项资助金额为500万元及以上的省级科技计划项目或1项省自然科学基金研究团队项目。
(2)研究团队:固定在职研究人员不少于20人,研究团队配置合理。
固定研究团队2016~2018年承担省部级以上科研项目不少于10项,项目总金额1000万元及以上。
(3)科研设施:实验室使用场地相对集中,原则上须符合《广东省科学技术厅关于省重点实验室建设与运行的管理办法》中关于实验室面积和科研仪器相关要求。
(4)以往成果:实验室整体科研水平达到国内先进水平,代表性成果国内领先,应提供2014年以来的5项代表性成果。
(5)开放合作:实验室仪器设备提供对外开放服务,实验室应设立开放课题和开放基金,须有实质性的国内外学术交流合作,有产学研合作机制。
2020年度广东省重点领域研发计划“精准农业”(水产绿色养殖及加工)重点专项申报指南
附件12020年度广东省重点领域研发计划“精准农业”(水产绿色养殖及加工)重点专项申报指南为实施《关于加快推进水产养殖业绿色发展的若干意见》,支撑引领水产养殖转型升级,启动实施“精准农业”(水产绿色养殖及加工)重点专项。
本专项根据广东水产养殖产业转型升级需求,围绕绿色水产品生产全链条,在良种选育技术、病害防控技术、精准功能性饲料、水产品加工和养殖模式等方面开展关键技术研究与应用示范。
2020年专项设置六个专题,共13个研究方向。
原则上同一研究方向支持1项,评审结果靠前且技术路线不同的项目可并行支持。
项目实施周期3~5年。
项目应整体申报,必须涵盖该项目下所列示的全部研究内容和考核指标。
项目申报单位不超6家,项目参与人不超15人,品种培育项目必须有品种培育企业参与。
专题一:批量化精准良种培育技术研究与示范(专题编号:20200202)项目1:重要海水养殖鱼类精准良种培育技术研究与示范(一)研究内容根据水产种业发展需求,针对石斑鱼、黄鳍鲷、卵形鲳鲹、花鲈等南方重要海水养殖鱼类生长、抗病、饲料高效利用等重要经济性状,解析复杂性状基因遗传网络,探索全基因组分子育种技术,开展分子标记与性状之间的关联分析,构建全基因组分子育种模型,开发全基因组分子育种芯片,批量创制具有自主知识产权、产业化应用潜力大的新品种新品系,进行养殖应用示范。
(二)考核指标1.培育生长速度提高20%的新品种新品系3个以上,抗病力提高20%的新品种新品系3个以上,每个新品种新品系养殖示范面积300亩或工厂养殖示范面积2000m2以上;申报新品种1~2个。
2.每个物种完成3个以上重要经济性状的遗传网络分子解析;每个性状鉴定基因组水平显著数量性状座位(QTL)1个以上,核心标记解释的性状表型值15%以上。
3.开发分子育种SNP芯片1套以上,包含与2个以上表型性状呈基因组水平显著关联的标记,遗传背景分析标记2万个以上。
4.建立一套针对3个以上表型性状的全基因组分子聚合育种技术体系。
2022-2023年度广东省重点领域研发计划“食品营养健康与食品安全”(农产品加工)重点专项申报指南
2022-2023年度广东省重点领域研发计划“食品营养健康与食品安全”(农产品加工)重点专项申报指南发展农产品加工业是实施乡村振兴战略、推动农村一二三产业融合发展的重要抓手。
为贯彻落实省委、省政府乡村振兴战略部署,保障粮食及重要农产品供给和食品安全,针对广东优势特色农产品精深加工关键技术提升,启动实施2023年度“食品营养健康与食品安全”(农产品加工)重点专项,围绕广东现代农业和食品产业集群发展科技需求,着力推进农产品保鲜和加工关键技术攻关,提高我省重要农产品精深加工产业附加值,科技支撑预制菜产业发展,促进现代农产品加工产业健康发展。
本专项设置7个项目,采用“竞争择优”申报方式。
项目申报须涵盖各自项目下所列示的全部研究内容和考核指标,在广东省开展技术应用与示范。
同一项目原则上支持1项,评审结果靠前且技术路线不同的项目可并行支持,实施周期3~5年,项目申报单位不超6家。
项目1:广东畜禽冷鲜贮运智能绿色保鲜关键技术研究与示范(一)研究内容。
以生猪、鸡为对象,开发畜禽冷鲜贮运智能绿色保鲜关键技术,包括高新冷杀菌保鲜技术、活性智能抗菌包装、高阻隔可降解包装、新鲜度指示标签、气调包装和减压冷藏不冻结保鲜技术,结合“栅栏技术”与HACCP体系,形成畜禽冷鲜绿色贮运的关键技术规程与质量控制体系。
建立示范基地进行应用示范推广。
(二)考核指标。
1.研发畜禽冷鲜处理一体化智能设备1套,畜禽肉制品运输质变率低于1%,风味物质流失量不超过10%,失水率不超过5%,弹性降低率减少5%以上;2.开发具有抑菌、高阻隔和气调等功效的新型全降解包装材料,延长冷鲜肉保质期2~3天以上,保水率85%以上;3.研发对畜禽肉制品腐败变质特征分子具有响应性的指示标签,要求对有机胺、硫化物等肉类腐败特征分子检出限低于1μmol/L,灵敏度显著高于现有商业化产品;开发对畜禽肉制品储运销售过程中温度波动具有预警监控作用的智能标签或成套设备,要求脱冷时长大于15分钟即可预警,且误报率低于1%;4.建立畜禽冷鲜贮运智能绿色保鲜关键技术应用示范基地3~4个,并对不同畜禽养殖加工企业建立推广示范点5个以上,产品综合效益提升10%以上。
计划类别【五大类计划体系】

计划类别:【五大类计划体系】归口领域:【按各处室分管业务】申请编号:项目名称经费需求计划起止时间项目与《技术榜单》或者《指南》的衔接性所属技术领域所属学科技术来源项目完成时的应用类型其中申请科技支持至□明确列入□基本属于□其他(请说明)1.电子信息2.光机电一体化3.自动化4.材料5.能源6.交通7.农业8.资源9.环境10.生物医药 11.社会事业 12.新材料及应用 13.其它A.数理科学B.化学科学C.生命科学D.地球科学E.工程与材料科学F.信息科学G.管理科学1.国内技术2.国外技术3. 自主开辟4.引进消化再吸收5.产学研结合□形成自主研发能力□局部试点示范1.基础研究2.应用基础研究项目活动类型 3.应用开辟4.产业化开辟5.其它□形成规模生产能力□较大范围推广应用1. 原始创新创新 2. 集成创新类型 3. 引进消化吸收再创新1.普通项目2.重点项目项目简介(主要研究内容,主要技术经济等指标)限 500 字优先主题优先主题的范畴领域领域(万元) (万元)单位名称单位类型组织机构代码或者(统一信用代码)通讯地址联系人联系电话开户银行序号单位名称主管部门所在地代码邮编E-mail传真银行帐号组织机构代码或者(统一信用代码)联系人联系方式其他主要参加单位项目组人数姓名证件类型学历职称手机所在单位人高级博士民族身份证号学位从事专业E-mail项目分工人中级人人硕士人项目组主要研究人员初级学士人人其他其他人人姓名证件类型证件号码学历学位职称从事专业手机号码所在单位项目分工·负责人(目标与任务需求分析,主要技术难点和问题分析,研究与开辟任务与内容,关键技术、技术难点、创新点,限 3000 字)期刊核心期刊 普通期刊 科技报告 至少 1 篇专利 申请(受理)数 授权数 其他 申请数 登记数 标准分类 牵头 参预省级科技成果转化报告 每年度至少 1 篇发明 实用新型 外观设计 PCT软件著作权 集成电路布图设计 植物新品种国家标准 行业标准 地方标准 企业标准培养高级职称以上 培养中级职称以上 引进高级职称以上新产品(种) 新技术(项) 新工艺(项) 新材料(项)支撑平台(个) 试验基地(个) 示范点(区) (个)其他报告研究报告国际国内计划投资总额其中:已完成投资 万元,计划新增投资1 经费支出(合计)2 一、直接费用3 1.设备费4 (1)购置设备费5 (2)试制设备费6 (3)设备改造与租赁费7 2.材料费 8 3.测试化验加工费9 4.燃料动力费10 5.差旅费/会议费/国际合作与交流费11 6.出版/文献/信息传播/知识产权事务费 12 7.劳务费 13 8.专家咨询费14 9.其他支出 15 二、间接费用 16 其中:绩效支出其中:申请科技经费其他拨款万元,自筹万元其中:自筹万元 万元万元 万元1.项目总投资预算、各项任务经费分配及分年度经费需求2.资金筹措方案及配套资金落实措施3、经费预算详细说明————领导签字:单位(公章)年月日领导签字:单位(公章)年月日年月日。
2019年度省重点研发计划重大科技创新工程(第二批)拟立
互联网+智能立体车库+大数据云平台管理系统工程 山东九路泊车设备股份有限公司
基于5G-V2X车路融合的乘用车自动驾驶项目
山东国金汽车制造有限公司
基于5G支撑的天空地一体化智慧农业决策支持平台 山东华宇航天空间技术有限公司
基于车路协同技术的智能交通服务平台建设与产业化 应用 基于大数据智慧型并网机组网源协同调频关键技术研 究与工程应用
大数据安全关键技术研究
齐鲁工业大学
基于快速密码算法的大数据高效安全存储系统
山东正中信息技术股份有限公司
区块链网络监管与安全防护关键技术
面向人工智能的自主可控大数据安全存储系统 高性能PBO纤维关键技术开发及产业化 柔性氧化铝陶瓷纤维制备汽车尾气三元催化用衬垫关 键技术及产业化应用 高性能差别化间位芳纶制备与工程化关键技术 基于纤维增强的功能性聚氨酯脲弹性体复合人防工程 材料的研究与产业化 微发泡注塑成型轻质高强原位微纤增强聚乳酸复合材 料构件的关键技术研究
申报项目名称
申报单位
合作单位
主部门
工业制造设备预测性维护的关键技术研究
青岛大学
基于多源异构数据的装备智能化服务关键技术研究与 中国科学院计算技术研究所济宁分所 应用
省级自然资源监测监管大数据应用服务平台建设
山东省国土测绘院
供水管网漏损监控大数据分析系统
山东潍微科技股份有限公司
数字孪生城市四维可视化信息系统及其在济南城区的 济南轨道交通集团有限公司 应用
山东省计算中心 (国家超级计算济南中 心) 北京鲸鲨软件科技有限公司 山东非金属材料研究所 山东东珩胶体材料有限公司 烟台泰和新材料股份有限公司 山东龙祥新材料科技有限公司
山东大学
高性能及大功率光纤激光关键材料研发和产业化
基于双维度搜索的地下自主铲运机最优转弯轨迹规划

基于双维度搜索的地下自主铲运机最优转弯轨迹规划顾 青1,2),刘 立1),白国星1),孟 宇1)✉1) 北京科技大学机械工程学院,北京 100083 2) 北京科技大学顺德研究生院,佛山 528300✉通信作者,E-mail: ************.cn摘 要 提出了一种基于双维度搜索的实时轨迹规划方法,用来解决自主地下铲运机转弯轨迹规划问题. 该方法是一种结合采样思想和最优化算法的复合轨迹规划方法,包含三个主要步骤:基于双维度搜索策略的优化模型参数生成,基于二次规划的轨迹计算,以及基于约束检查的最优轨迹确定. 该方法新颖之处在于提出的基于转弯区域行驶时间和里程的双维度搜索策略,以及基于平稳目标的轨迹最优化模型,可根据弯道区域入口速度和位置,快速生成纵横向都有最优性保证的最优轨迹.该方法结构简单、易于实施,可通过关键参数的调整满足控制器对轨迹生成速度的实时性要求. 基于该轨迹规划方法的特点,使其不仅适用于实时轨迹规划,还可为未来智慧矿山的智能管控与优化调度提供底层约束. 多组算例验证了该方法的有效性和优越性.关键词 地下铲运机;自主行驶;轨迹规划;纵横向轨迹规划;搜索策略分类号 TP202.7Optimal turning trajectory planning of an LHD based on a bidimensional searchGU Qing 1,2),LIU Li 1),BAI Guo-xing 1),MENG Yu 1)✉1) School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China 2) Shunde Graduate School, University of Science and Technology Beijing, Foshan 528300, China✉Corresponding author, E-mail: ************.cnABSTRACT To solve the problem of smooth turning of an autonomous underground load-haul-dump loader (LHD), in this paper, amethod for turning trajectory planning of an LHD was proposed. This method is a type of hybrid trajectory planning method based on a bidimensional search. According to the characteristic of the problem, the longitudinal and lateral decomposition method was applied, and the basic algorithms are a sampling method and an optimization algorithm. The algorithm consists of three main steps that are parameter generation of the optimal model based on a bidimensional search strategy, trajectory calculation based on quadratic programming models, and determination of the optimal trajectory based on an articulated angle and collision avoidance constraints check. The novelty of this method lies in the proposed two-dimensional search strategy and trajectory optimization models. The two dimensions are the driving time and mileage of the trajectory in the turning area; the trajectory optimization model is based on the quadratic programming that can quickly generate the optimal trajectory in both dimensions according to the turning area entering speed and position of the LHD.This trajectory planning method is simple in structure and easy to implement. Moreover, it can satisfy the real-time requirement of the controller on the trajectory generation time by adjusting the key parameters. Based on the characteristics of the trajectory planning method, it is not only suitable for real-time trajectory planning but can also provide basic constraints for intelligent control and optimal scheduling of intelligent mines. A series of case studies was conducted to show the effectiveness and superiority of the proposed method.The case studies show that the optimal trajectories according to different entering speeds and positions can be obtained through the proposed method. A prototype experiment was performed to show the feasibility of the proposed trajectory planning method. This收稿日期: 2020−11−09基金项目: 国家重点研发计划资助项目(2018YFC0810500, 2019YFC0605300);广东省基础与应用基础研究基金资助项目(2019A1515111015)工程科学学报,第 43 卷,第 2 期:289−298,2021 年 2 月Chinese Journal of Engineering, Vol. 43, No. 2: 289−298, February 2021https:///10.13374/j.issn2095-9389.2020.11.09.002; method generates trajectories that are easy to track and control because the velocity, articulated angle, and angular velocity change gently.KEY WORDS load haul dump;autonomous driving;trajectory planning;vertical and horizontal trajectory planning;search strategy地下铲运机是一种铰接式结构的地下无轨移动采矿装备,具有转弯半径小,地形适应能力强的特点,广泛应用于矿产开采和运输. 随着采矿行业的发展,采矿深度不断增加,地下高温高湿环境对驾驶员身体有极大伤害,因此,自主行驶成为新一代智能移动采矿装备的必备功能.为了实现铲运机的自主行驶,轨迹规划与控制方法被广泛的研究[1−11]. 文献[1]~[8]研究了地下铲运机的导航控制方法,进而实现铲运机可以在地下巷道内采用“沿壁法”安全避障行驶. 文献[8]在无约束小范围内,可在铲装点和卸载点之间生成平滑行驶路径. 文献[9]提出了一种基于蚁群算法的路径规划方法,在地下巷道环境内,可生成全局最优路径. 文献[10]提出一种自主导航控制框架:首先人工示教生成导航地图和驾驶提示信息,然后在自主行驶时依照驾驶提示信息行驶. 基于这些研究,目前铲运机自主行驶技术可分为两类:一类是路径规划和跟踪,此类方法没有考虑到速度因素,因此对于行铲运机工作效率无法考虑,同时行驶速度较慢;另一类是先人工示教,然后自主行驶. 此类方法受到驾驶员经验影响较大,一般在直道中可以以较高的速度行驶,而接近转弯区域时,为了避免与巷道壁碰撞,驾驶员通常会提前减速,以很低的速度通过转弯区域,也就是说,通过转弯区域的行驶时间较长. 因为铲运机的地下金属开采工作主要是出矿,通常每个“铲—运—返”工作循环都要转弯,所以,转弯区域通过时间长会影响铲运机工作效率. 总的来说,目前铲运机的自主行驶水平还处于初级阶段.对于采用跟踪目标要来完成自主行驶功能的控制框架来说,除了研究高精度的跟踪控制算法[11−12],进行高质量的轨迹规划也是提高自主行驶水平的有效途径. 目前针对乘用车轨迹规划法方法的研究很多,总体可以分为直接法[13−19]、基于解耦的方法[20−32],较好的解决了乘用车在边界曲率平缓的公路上的轨迹规划问题. 文献[31]研究了铲运机在地下巷道内典型循环工况的轨迹规划问题,可视为一种转弯轨迹规划问题. 其中,纵向轨迹规划是一个二次规划问题,易于求解. 然而横向轨迹还是一个非线性优化模型,因此求解时间较长(而且有可能得不到最优解或可行解);此外,研究发现,当转弯角度过大时,现有的约束并不能约束铰接角及其角速度. 究其原因,还是没有将铰接角及其角速度作为决策变量加入到优化模型之中,无法对其直接约束. 然而,若是直接将铰接角及其角速度作为决策变量,则根据其运动状态方程,轨迹优化模型一定是一个复杂的非线性优化模型,能否得到最优解或可行解都没有保障.为了解决上述问题,提高自主铲运机的弯道行驶性能,根据铲运机及其行驶环境特点,本文提出了一种基于双维度搜索的地下铲运机最优转弯轨迹规划方法. 本文的贡献及新颖之处在于设计了一种基于行驶里程和时间的双维度搜索策略,在轨迹计算阶段,建立了一种以平稳行驶为目标的纵横向解耦二次规划模型,其中,铰接角及铰接角速度约束并不在优化模型中直接考虑,而是通过对生成轨迹进行约束条件检查来筛选得到满足约束的最优轨迹. 与现有规划方法不同的是,使用本文提出的方法可以快速得到在纵向横向两个维度都具有最优性保证的轨迹,不需要后备策略,保障了导航控制系统中轨迹规划层的可靠性,提高了生成轨迹的质量和速度,使铲运机在转弯时可以合理调整行驶速度和位置,实现高效转弯,提高生产效率.本文提出的方法具有以下特点:能够生成平稳的转弯轨迹,模型简单易于实时求解,所得到的轨迹具有最优性保证,不需要后备策略.文章结构如下,第一章介绍铲运机运动学模型、转弯区域模型及所研究的具体问题,第二章介绍轨迹规划方法框架,第三章介绍轨迹规划方法数学模型,第四章和第五章是算例分析与样机试验,验证本文提出的方法有效性和优越性,第五章总结结论.1 对象、场景模型与问题描述1.1 铲运机运动学模型P AP f(x f,y f)P r(x r,y r)θfθrP f P r P A L f L rγθfθr由于铲运机(Load haul dump,LHD)具有铰接结构,对其运动姿态的描述与刚性车辆不同,在运动规划时需要同时考虑其航向角和铰接角. LHD 的整体结构如图1所示,车体由两部分组成.是前后车体的交接点,是前桥中心点,是后桥中心点,和分别是前后车体的航向角. 和与之间的距离分别为和. 定义铰接角为与之差· 290 ·工程科学学报,第 43 卷,第 2 期P f P r 和之间的位置关系可以表示为铰接车辆的运动学模型[30]可以描述为v f ˙γγ其中,为前车体速度,为铰接角的角速度. 可知,前车体航向角的角速度为铰接角及其角速度的物理约束为γmin γmax ˙γmin ˙γmax 其中,为铰接角最小值,为铰接角最大值,为铰接角速度最小值,为铰接角速度最大值.1.2 弯道区域模型转弯区域如图2所示. 图2(a )中,巷道A 与O L safe αL A L B (x out ,y out )L ′A L ′BB 相交,铲运机从巷道B 向巷道A 转弯. 在路口建立直角坐标系,为转弯区域起点位置,位于巷道A ,弯道区域直角坐标系Y 轴垂直于巷道B 的边界;红色虚线为转弯区域结束的位置,垂直于巷道A 的边界. 是安全距离长度,黑色虚线之间的蓝色阴影部分是除去安全边界的可行区域;为两巷道夹角;和分别为巷道A 和B 在转弯区域的长度. 是弯道出口处左边界点位置坐标. 地下巷道转弯处都会根据铰接式采矿装备的转弯半径进行有磨角,目的是为了使这类移动采矿装备能够安全通过路口. 磨角后,转弯处可行区域增大,如图2(b )所示,和是磨角操作后巷道A 和巷道B 的剩余长度.1.3 问题描述当铲运机进入转弯区域时,根据铲运机当前速度、位置,实时生成一条平稳轨迹,使铲运机能够在安全转弯的情况下,平稳的行驶出转弯区域.在轨迹规划时,要满足下列约束条件:(1)前后车体都不与巷道壁发生碰撞;(2)铲运机速度不超过限速;(3)铰接角和铰接角速度不超过设计约束值;(4)在驶出转弯区域时,前车体方向与巷道壁平行.2 轨迹规划算法框架2.1 最优轨迹存在性分析在矿山建设中,巷道的结构和尺寸与矿产种类、分布、采矿工艺相关. 也就是说,在建设之初,巷道尺寸和拟选用的采矿装备是相互匹配的. 而且,在地下巷道的路口处,都要根据采矿装备的转弯半径进行磨角,这是一种标准操作,目的就是为了能使铰接式的移动采矿装备可以安全无碰撞通过路口. 因此,对于给定铲运机以及符合其标准的图 1 LHD 结构Fig.1 Structure of an LHD图 2 地下巷道转弯区域. (a )磨角之前的转弯区域;(b )磨角之后的转弯区域Fig.2 Roadway tuning area: (a) before grinding; (b) after grinding顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 291 ·路口,铲运机一定能够顺利通过.轨迹同时包含速度和位置信息,通常来说,可以通过路口的轨迹不止一条. 当铲运机采用不同的速度,沿不同曲率的路径曲线,都可以安全通过路口. 例如:对于一条比较平缓的位置曲线,采用不同的速度都可以很好的沿此位置曲线行驶,但是每种速度对应了不同的轨迹. 因此,当对轨迹设置一个的评价指标后,则在可行轨迹之中,存在一个最优指标值最小的最优解,本文的目标正是寻找这一最优轨迹.2.2 算法思想及框架本质上,弯道区域中每条可行轨迹可以通过不同行驶里程和行驶时间表征. 因此,为了能够根据入口速度和位置快速的生成最优轨迹,本文提出一种基于双维度搜索策略的轨迹优化方法. 此方法核心思想是在弯道行驶区域内,通过调整轨迹的里程和时间,找到最优轨迹. 本方法采用最优化算法进行构建,总体过程是:根据里程和时间迭代策略给出的终端位置和行驶时间,计算轨迹并检查是否符合铲运机铰接角物理约束,最终得到最优轨迹. 因此,算法主要包含三步:(1)确定行驶里程和行驶时间.此步骤的作用是确定当前轨迹规划问题的行驶里程与时间. 设计了一种双维度搜索策略,每次在轨迹计算前,首先通过搜索策略,从终端位置和行驶时间两个维度进行调整,确定当前迭代的终端位置和行驶时间.(2)轨迹生成.在转弯区域直角坐标系下,将轨迹分解为纵向和横向两个维度,分别采用二次规划生成最优轨迹(此时并不考虑铰接角约束). 本算法中,横纵向轨迹都建模为二次规划问题,因此,所得到的轨迹在纵向和横向两个维度都具有最优性保证,而且求解速度快.(3)轨迹铰接角约束检查及最优轨迹确定.对于生成的轨迹,根据运动学方程计算铰接通过,则最优轨迹找到;否则,回到第一个步骤进入下一次迭代.使用本算法,针对一个转弯路口,基于铲运机进入转弯区域的位置和速度,本文提出的方法能够快速的找到一条纵向和横向都具有最优性保证的最优轨迹,不需要后备策略. 第三章介绍规划算法的具体细节.3 轨迹规划算法3.1 基于双维度搜索的终端位置和行驶时间确定本算法中利用二次规划构建轨迹生成模型,设计基于双维度搜索的策略来确定优化问题的具体条件. 其中,外循环调整轨迹的行驶时间,内循环调整轨迹终端位置. 在每次循环中,首先计算纵向轨迹,然后计算横向轨迹.i j T i j 记为外循环中的循环变量,为内循环中的循环变量,每次循环中行驶时间通过方程(8)设置,v in ∆v 其中:是铲运机进入转弯区域的入口速度;为速度递减间隔.(x end i j ,y end i j )每次循环中轨迹终端位置,通过如下方程设置,W B ∆d =(W B −2L safe )/m m 其中:为巷道B 宽度;为位置递增间隔,即将巷道B 的可行宽度进行等间隔离散后的离散长度,为间隔离散个数.3.2 基于二次规划的转弯轨迹计算本算法中轨迹计算是基于纵向横向解耦和二次规划完成的. 首先生成纵向行驶轨迹,然后生成横向行驶轨迹.(1)纵向轨迹规划模型.N 将转弯轨迹离散为段,纵向轨迹规划建模为一· 292 ·工程科学学报,第 43 卷,第 2 期J lo ∆t =T i /N T i k λ1λ2ε1x i v x i a x i ∆a x i x 0=0v x 0=v x in a x 0=a x in v x in a x in 其中:是纵向轨迹目标函数;,是第i 次外循环时铲运机行驶时间;是轨迹点序号;和为权重系数,是松弛变量,是铲运机前桥中心点纵向位置;是前桥中心点纵向速度,和分别是前桥中心点纵向加速度和加速度变化量,,,;公式(11-5)表示的约束是为了令轨迹终端姿态与巷道壁平行. 和分别是铲运机进入转弯区域的入口纵向速度和在本算法中,在目标函数是最小化加速度及其变化量. 没有将目标速度考虑在优化模型之中,这是因为在弯道区域,理想的目标速度很难设定,设置不好会造成实际速度曲线发生突变,难以控制.(2)横向轨迹规划模型.横向轨迹规划也采用二次规划模型,与文献[30]中方法不同的是,此时并不考虑铰接角相关约束,因此可以将横向轨迹规划模型也建立为一个标准J la ρ1ρ2ε2y i v y i a y i ∆a y i y 0=y in v y 0=v y in a y 0=a y in v y in a y in 其中:是横向轨迹目标函数;和为权重系数,是松弛变量,是铲运机前桥中心点横向位置;是前桥中心点横向速度,和分别是前桥中心点纵向加速度和加速度变化量,,,;公式(12-5)表示的约束是为了令轨迹终端姿态与巷道壁平行. 和分别是铲运机进入转弯区域的入口横向速度和加速度. 与纵向轨迹规划模型设计思想相同的是,目标函数是最小化加速度及其变化量.3.3 基于约束检查的最优轨迹确定γi −max ˙γi −max 上面的模型并未考虑铰接角约束,为了保证铰接角及其角速度符合约束,本算法设计了约束检查环节. 根据公式(4)可以计算得到此轨迹对应的铰接角和铰接角速度序列. 记本条轨迹中最大铰接角为、最大铰接角速度为,对于可行的轨迹,有同时,对于最优轨迹来说,松弛变量应该为0,即此外,还需进行碰撞检查,本文采用的是最为简单的膨胀法,此处不赘述.j =j +1j =m i =i +1若公式(13)、(14)和(15)同成立,且铲运机与边界没有碰撞,则迭代停止,当前轨迹为最优轨迹;否则,返回公式(9)和(10)进行内循环;若时都没有获得最优解,则,返回公式(8)进行外循环. 由于外循环相当于降低行驶速度,所以在延长转弯行驶时间的情况下,一定能找到符合约束的轨迹,此时迭代停止,当前轨迹为最优轨迹. 具体流程如图3所示.图 3 双维度搜索轨迹规划方法流程图Fig.3 Flow chart for the two-dimensional search-based trajectory planning method顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 293 ·4 算例分析与讨论为了验证本文提出的轨迹规划方法,设计了三组算例. 设置了一种难度较高的转弯场景,转弯角度为直角,且铲运机从宽巷道向窄巷道转弯行驶,描述了一种铲运机从运输巷道向开采巷道内转弯的场景. 算例参数如表1所示. 三组算例分别设计为:以相同的入口位置,不同的入口速度进入ij T bestγmax˙γmax转弯区域. 将入口位置分为三个等级,由于铲运机在地下平直巷道工作时限速一般为15 km·h−1,也就是4 m·s−1左右,因此将入口速度分为四个等级,入口方向都与巷道B保持平行. 然后,针对每个入口速度,求解其最优轨迹,求解采用Matlab quadprog 函数,并将得到最优轨迹时内循环次数、外循环的次数、最优轨迹对应的行驶时间,以及此条轨迹中的最大铰接角和最大角速度列出.表 1 算例参数表Table 1 Parameters for case studiesW A/m W B/m L A/m L B/mα/rad L safe/m∆v/(m·s−1)∆d/(m·s−1)m5 4.53030π/2 1.50.10.54L f/m L r/mγmin/radγmax/rad˙γmin/(rad·s−1)˙γmin/(rad·s−1)L′A/m L′B/m N1.52−0.690.69−0.170.17242433(1)第一组算例,入口位置为(0,1.5), 不同入口速度的最优轨迹计算结果列表如表2所示.表 2 第一组算例结果Table 2 Results of the first groupv in/(m·s−1)i j T best/sγmax/rad˙γmax/(rad·s−1)12366.670.510.0627442.840.510.06313433.330.470.06417428.540.420.06(2)第二组算例,入口位置为(0,2.5), 不同入口速度的最优轨迹计算结果列表如表3所示.表 3 第二组算例结果Table 3 Results of the second groupv in/(m·s−1)i j T best/sγmax/rad˙γmax/(rad·s−1)12366.670.510.0627442.840.530.06313433.330.50.07417428.540.450.08(3)第二组算例,入口位置为(0,3.5), 不同入口速度的最优轨迹计算结果列表如表4所示.表 4 第三组算例结果Table 4 Results of the third groupv in/(m·s−1)i j T best/sγmax/rad˙γmax/(rad·s−1)12366.670.530.0627442.840.560.07313433.330.530.08417428.540.480.09从上面的算例可以看出,针对不同的入口速度和位置,采用所提出的规划方法都可以得到最优轨迹.∆v∆v=0.2在相同的位置,入口速度越高,迭代次数越多. 根据本算例中的问题规模,单次轨迹生成时间为0.005 s左右,若是迭代上百次,则有可能超过控制周期(例如,当入口速度为4 m·s−1时,迭代次数为17×3×2=102次,则得到轨迹的时间超过了0.5 s),这就会影响轨迹跟跟踪性能. 因此,可以通过调整速度减小间隔这一迭代关键参数的方法来减少迭代次数. 例如,当 m·s−1时,迭代次数减少一半. 因此,本方法可以根据控制器性能,调整间隔,满足实际控制需求.vγvθfvθr为了更直观显示轨迹,以入口坐标为(0, 2.5),入口速度为2 m·s−1的情况为例,图4~6给出了最优轨迹的位置曲线,速度曲线、铰接角、航向角和相应的角速度曲线. 图6中,、和分别是铰接角和前后车体的航向角速度. 可以看出,沿行驶方向速度、铰接角和铰接角速度变化平缓,适合跟踪控制.y in=2.5,v x in=2图 4 位置曲线()y in=2.5,v x in=2Fig.4 Position trajectory ()· 294 ·工程科学学报,第 43 卷,第 2 期T best通过本文提出的方法可知,可视为以当前初始状态及平稳目标下铲运机通过弯道的最短时间. 因此,当找到最优轨迹之后,若将行驶时间继续延长,也就是继续外循环,也能找到满足新的行驶时间的解. 同理,对于一个固定的终端位置,只采用外循环延长时间,也可得到满足要求的最优轨迹,下面分别举例.对于入口位置为(0, 2.5),入口速度为2 m·s−1的情况,得到最优轨迹时,i=7,j=4,T best=42.84 s,轨迹在出口的终端位置为(33, 35). 此时,若保持此终端位置,将行驶时间设置为70 s,通过本文提出的方法得到最优转弯轨迹如图7~9所示.还是以入口位置为(0, 2.5),入口速度为2 m·s−1的情况为例,当要求铲运机行驶出转弯区域时,位置位于巷道中心线,也就是出口位置为(32.25, 35),采用本文提出的方法,只进行外循环,得到的最优轨迹如图10~12所示. 此时i=9,弯道行驶时间为46.15 s.y in=2.5,v x in=2图 5 行驶方向速度曲线()y in=2.5,v x in=2 Fig.5 Heading velocity trajectory ()y in=2.5,v x in=2图 6 铰接角、前后车体航向角及角速度()γθfθr y in=2.5,v xin =2Fig.6 Angle and angular velocity for , and ()T i=70s图 7 位置曲线()T i=70sFig.7 Position trajectory ()T i=70s图 8 行驶方向速度曲线()T i=70sFig.8 Heading velocity trajectory ()T i=70s 图 9 铰接角、前后车体航向角及角速度()γθfθr T i=70s Fig.9 Angle and angular velocity for , , and ()顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 295 ·5 样机试验为了表明算法的可行性,进行了样机试验. 样EθfE v机如图13所示. 采用激光雷达和电子地图进行定位. 工控机为研华ARK-3500,Intel Core i5-3610ME,2.7 GHz. 试验环境为楼道内的一个直角转弯处,楼道宽度为2.2 m. 由于是楼道试验,为了保证安全,最高速度设置为1 m·s−1. 试验参数设置如表5所示. 样机从转弯区域外开始启动并加速到1 m·s−1,保持此速度进入转弯区域,车辆控制周期为0.2 s.要求行驶出转弯区域时车辆位于巷道中线,基于本文提出的轨迹规划方法,得到最优解时,i=1,因此轨迹生成时间在一个控制周期之内. 所生成的轨迹时间为7.2 s,速度和角度曲线如图14所示.路径采用LTV-MPC进行控制,速度采用PID控制,样机也平稳安全的通过了直角弯道,图15显示了速度和航向角误差,其中,为前车体航向角跟踪误差,为铲运机速度跟踪误差. 可以看出,误差都保持在一个很小的水平.图 13 铰接车试验平台Fig.13 Articulated vehicle6 结论(1)本文提出的方法可以生成纵向和横向都具有最优性保证的轨迹,理论上保证了生成轨迹的最优性.(2)本文提出的方法优化得到的轨迹,其纵向速度、铰接角及角速度变化平缓,易于跟踪控制.(3)本文提出的算法可根据底层控制器的控制周期灵活调整迭代关键参数,进而调整轨迹生成时间,满足控制器对目标轨迹生成时间的要求.(4)本文提出的算法适用于宽窄不同的、角度不同的转弯路口,不需要复杂的边界处理与坐标转换,因此便于实际部署实施.(5)本文提出的方法既可以根据入口速度和位置生成安全平稳的最优转弯参考轨迹;也可用于根据具体条件确定弯道最短行驶时间,因此,不仅适用于实时轨迹规划,也可为多装备协同运行,甚至未来矿山的智能管控和调度等问题提供系统约束.图 10 位置曲线(出口位置为(32.25, 35))Fig.10 Position trajectory (exit position is (32.25, 35))图 11 行驶方向速度曲线(出口位置为(32.25, 35))Fig.11 Heading velocity trajectory (exit position is (32.25, 35))图 12 铰接角、前后车体航向角及角速度(出口位置为(32.25, 35))γθfθrFig.12 Angle and angular velocity for , , and (exit position is(32.25, 35))· 296 ·工程科学学报,第 43 卷,第 2 期参 考 文 献Mäkelä H, Lehtinen H, Rintanen K, et al. Navigation system forLHD machines. IFAC Proc Vol , 1995, 28(11): 295[1]Roberts J M, Duff E S, Corke P I. Reactive navigation andopportunistic localization for autonomous underground mining vehicles. Inf Sci , 2002, 145(1-2): 127[2]Dragt B J, Camisani-Calzolari F R, Craig I K. An overview of theautomation of load-haul-dump vehicles in an underground mining environment. IFAC Proc Vol , 2005, 38(1): 37[3]Larsson J, Broxvall M, Saffiotti A. A navigation system forautomated loaders in underground mines // Proceedings of the 5th International Conference on Field and Service Robotics (FSR -2005). Port Douglas, 2005: 1[4]Shi F, Gu H S, Zhan K, et al. Study on the control method ofunderground loader autonomous driving and obstacle avoidance.Nonferrous Met (Mine Sect ), 2015, 67(5): 68[5](石峰, 顾洪枢, 战凯, 等. 地下铲运机自主行驶与避障控制方法研究. 有色金属(矿山部分), 2015, 67(5):68)Yang C, Chen S X, Liu L, et al. Reactive navigation for undergro-und autonomous scraper. J China Coal Soc , 2011, 36(11): 1943(杨超, 陈树新, 刘立, 等. 反应式导航在地下自主行驶铲运机中的应用. 煤炭学报, 2011, 36(11):1943)[6]Long Z Z, Zhan K, Gu H S, et al. The control method based onimproved fuzzy-PID algorithm for the autonomous driving of intelligent LHD. Nonferrous Met (Mine Sect ), 2015, 67(5): 76(龙智卓, 战凯, 顾洪枢, 等. 基于改进模糊PID 算法的智能铲运机自主行驶控制方法. 有色金属(矿山部分), 2015, 67(5):76)[7]Andersson U, Mrozek K, Hyyppä K, et al. Path design and controlalgorithms for articulated mobile robots // Field and Service Robotics . London, 1998: 390[8]Long Z Z, Zhan K, Gu H S, et al. Global path planning ofintelligent load-haul-dump based on improved ant colony algorithm. Nonferrous Met (Mine Sect ), 2013, 65(2): 6(龙智卓, 战凯, 顾洪枢, 等. 基于改进蚁群算法的智能铲运机全局路径规划. 有色金属(矿山部分), 2013, 65(2):6)[9]Shi F, Gu H S, Zhan K, et al. The basic method study on thelocation-navigation and control strategy for the independent LHD unit. Nonferrous Met (Mine Sect ), 2009, 61(2): 65(石峰, 顾洪枢, 战凯, 等. 自主铲运机的定位导航和控制策略基本思路. 有色金属(矿山部分), 2009, 61(2):65)[10]Jiang C, Wang H W, Li J K, et al. Trajectory-tracking hybridcontroller based on ADRC and adaptive control for unmanned helicopters. Chin J Eng , 2017, 39(11): 1743(姜辰, 王浩文, 李健珂, 等. 无人直升机自抗扰自适应轨迹跟踪混合控制. 工程科学学报, 2017, 39(11):1743)[11]Invernizzi D, Lovera M, Zaccarian L. Dynamic attitude planningfor trajectory tracking in thrust-vectoring UAVs. IEEE Trans Autom Control , 2020, 65(1): 453[12]Ziegler J, Bender P, Dang T, et al. Trajectory planning for Bert-ha — A local, continuous method // 2014 IEEE Intelligent Vehicles Symposium Proceedings . Dearborn, 2014: 450[13]Ziegler J, Bender P, Schreiber M, et al. Making bertha drive—anautonomous journey on a historic route. IEEE Intell Transp Syst Mag , 2014, 6(2): 8[14]Liu C L, Lin C Y, Tomizuka M. The convex feasible set algorithmfor real time optimization in motion planning. SIAM J Control Optim , 2018, 56(4): 2712[15]Liu C L, Lin C Y, Wang Y Z, et al. Convex feasible set algorithmfor constrained trajectory smoothing // 2017 American Control[16]表 5 试验参数表Table 5 Parameters for experimentsW A /m W B /m L A /m L B /m α/rad L safe /m ∆v /(m·s −1)∆d /(m·s −1)m 2.22.23.63.6π/20.30.10.83L f /m L r /m γmin /rad γmax /rad ˙γmin /(rad·s −1)˙γmin /(rad·s −1)L ′A/m L ′B/m N 0.60.6−0.690.69−0.170.173.6 3.633图 14 参考速度和航向角曲线Fig.14 Reference trajectory for velocity and heading图 15 速度和航向角跟踪误差Fig.15 Tracking Errors trajectory for velocity and heading顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 297 ·。
2016—2022_年国家重点研发计划项目立项情况分析
第28期2023年10月江苏科技信息Jiangsu Science and Technology InformationNo.28October,2023作者简介:谢锦园(1991 ),女,江西玉山人,副科长,硕士;研究方向:科研项目管理,科学计量㊂2016—2022年国家重点研发计划项目立项情况分析谢锦园(南京大学科学技术处,江苏南京210093)摘要:国家重点研发计划是我国科技改革创新的重大战略举措,自2016年实施以来,逐步成为我国解决重大战略科技问题㊁服务国民社会经济发展的重要渠道㊂文章以2016 2022年国家重点研发计划立项项目为研究对象,从项目所属领域㊁牵头承担单位区域和性质等方面进行统计分析,进而从聚焦我国重点研发计划战略布局㊁强化产学研合作与创新管理体系等方面提出思考与建议㊂关键词:国家重点研发计划;项目立项分析;科研管理中图分类号:G311㊀㊀文献标志码:A 0㊀引言㊀㊀为深入实施创新驱动发展战略,全面落实‘国家中长期科学和技术发展规划纲要(2006 2020年)“,解决科技资源配置 碎片化 问题,2014年国家发布了‘关于深化中央财政科技计划(专项㊁基金等)管理改革方案“(国发 2014 64号)㊁‘国务院关于改进加强中央财政科研项目和资金管理的若干意见“(国发 2014 11号)等改革文件[1-2],将改革前的近百个中央财政科技计划(专项㊁基金等)优化布局,形成了国家自然科学基金㊁国家科技重大专项㊁国家重点研发计划㊁技术创新引导专项(基金)㊁基地和人才专项5类项目,并纳入统一的国家科技管理平台进行管理㊂国家重点研发计划是由科技部 973 计划㊁ 863 计划㊁国家科技支撑计划㊁国际科技合作与交流专项㊁产业技术研究与开发资金㊁公益性行业科研专项等20余个科技计划及专项整合形成的新计划[3],该计划瞄准事关国计民生的农业㊁能源资源㊁生态环境㊁健康等领域中需要长期演进的重大社会公益性研究,事关产业核心竞争力㊁整体自主创新能力和国家安全的战略性㊁基础性㊁前瞻性重大科学问题㊁重大共性关键技术和产品㊁重大国际科技合作,旨在突破国民经济各主要领域的技术瓶颈[4]㊂国家重点研发计划按照重点专项㊁项目实行分层次管理,项目是国家重点研发计划组织实施的基本单元[5]㊂本文对2016 2022年立项的国家重点研发计划项目进行梳理,从年度㊁领域㊁区域㊁牵头承担单位等方面展开统计分析,以期为科研单位提高承担国家重大科研任务能力及科研人员选择研究方向提供借鉴参考㊂1㊀数据来源与处理㊀㊀本文研究所需国家重点研发计划项目立项信息来源于科技部国家科技管理信息系统公共服务平台以及7家项目管理专业机构官方网站,统计截止日期是2023年6月30日㊂将平台采集的项目立项信息整理建立数据表,并以此为基础结合研究需要,补充项目牵头承担单位的类型与所在区域㊁项目所属领域等相关信息㊂然后,运用传统数据分析方法,对总体立项情况和项目分布情况进行描述性分析,并选取上海㊁江苏㊁广东㊁浙江4个代表性区域进行对比分析㊂2㊀2016 2022年项目立项情况2.1㊀项目年度立项情况㊀㊀2016 2022年期间,科技部共启动了133个国家重点研发计划重点专项,立项了8355个项目㊂从年度项目立项数量(见图1)上看,2016 2022年分别立项了1172项㊁1333项㊁1434项㊁611项㊁540项㊁1132项㊁2133项㊂可以看出, 十三五 前3年项目立项数量较多,后两年项目立项数量大幅下降; 十四五 开局情况与 十三五 相似,2021年和2022年项目立项数量较多,2021年项目立项数量基本与2016年持平,而2022年项目立项数量较2017年大幅增加,增幅高达60%㊂2.2㊀项目领域分布情况㊀㊀根据国家重点研发计划管理归口部门,将其划分为5个领域方向:社会发展㊁高新技术㊁农村科技㊁基图1㊀2016 2022年国家重点研发计划项目立项数量分布础研究和其他领域(包括政府间国际科技创新合作㊁战略性科技创新合作㊁科技冬奥㊁平方公里阵列射电望远镜(SKA)专项等重点专项)㊂从5个领域方向项目立项数量(见表1)来看,社会发展领域2944项,高新技术领域2385项,农村科技领域937项,基础研究领域1941项,其他领域148项㊂考虑到其他领域重点专项的项目立项公示数据较少,且其中部分重点专项部署时间较短,因此本文不再将其他领域重点专项的项目立项情况和其余4个领域方向开展对比分析㊂表1㊀2016 2022年5个领域方向国家重点研发计划项目数量分布情况领域2016年2017年2018年2019年2020年2021年2022年专项/个项目/项专项/个项目/项专项/个项目/项专项/个项目/项专项/个项目/项专项/个项目/项专项/个项目/项社会发展1455817493205451531481221924520667高新技术132761540422485435141781935823649农村科技81168140111373603321414617306基础研究722282741022910153111791437714507其他001222382492291614总计4211724913336514343461138540671132752133㊀㊀从4个领域方向逐年项目立项情况(见图2)来看,社会发展㊁高新技术两个领域方向项目数量占比较高,合计占当年立项项目总量的60%左右,其中2016㊁2018年占比超过了70%;基础研究领域占比较为稳定,维持在20%左右㊂此外, 十三五 期间,社会发展㊁高新技术和农村科技3个领域方向基本集中在前3年大规模部署项目,而基础研究领域5年间较为稳定持续地部署项目㊂2.3㊀项目牵头承担单位情况㊀㊀2016 2022年期间,共有2163家单位牵头承担了国家重点研发计划项目,按高等院校㊁科研院所㊁企业和其他4种单位类型对项目牵头承担单位进行分类统计(见表2),可以看出:高等院校牵头承担的项目数量最多,占比高达47.15%;科研院所牵头承担的项目数量次之,占比33.17%;企业牵头承担的项目数量较少,占比仅为19.09%;其他类别占比为0.6%㊂同时,平均每个高等院校牵头承担了4.00个项目,平均每个科研院所牵头承担了1.82个项目,平均每个企业牵头承担了1.11个项目㊂综上,高等院校师资规模大㊁学科门类全,科研院所规模小㊁专业化程度图2㊀2016 2022年国家重点研发计划分领域项目数量分布表2㊀2016 2022年各类型项目牵头承担单位承担国家重点研发计划项目数量情况领域2016年2017年2018年2019年2020年2021年2022年单位/个项目/项单位/个项目/项单位/个项目/项单位/个项目/项单位/个项目/项单位/个项目/项单位/个项目/项高等院校1134911375251536261233011022511416271761118科研院所23346925350526345412018097136197352294675企业186205258295308348117125138149130144291329其他7788564544791111总计53911726561333729143436461134154047511327722133㊀注:其他类型包含北京市实验动物管理办公室㊁北京市医疗器械检验所㊁故宫博物院㊁广东省实验动物监测所㊁湖北技术交易所㊁江苏省交通工程建设局㊁交通运输部上海打捞局㊁交通运输部烟台打捞局㊁南京博物院㊁南京市产品质量监督检验院㊁农业农村部环境保护科研监测所㊁全国海关信息中心㊁厦门市产品质量监督检验院㊁上海博物馆㊁上海市食品药品检验所㊁上海市医疗器械检测所㊁深圳海关动植物检验检疫技术中心㊁深圳证券交易所㊁长江航道局㊁中关村泛联移动通信技术创新应用研究院㊁中国大洋矿产资源研究开发协会㊁中国广播电影电视社会组织联合会㊁中国国家博物馆㊁中国海洋工程咨询协会㊁中国环境监测总站㊁中国汽车工程学会㊁中国人民解放军93209部队㊁中国认证认可协会㊁中国兽医药品监察所㊁中国丝绸博物馆㊁中国体育用品业联合会㊁中央广播电视总台等㊂高,二者是国家科技创新体系的重要组成部分,在国家重点研发计划的部署实施中发挥主力军的作用,合计承担了超过80%的国家重点研发计划项目㊂对高等院校㊁科研院所㊁企业3种类型项目牵头单位中承担项目数量排名前10的单位进行分析(见表3):高等院校牵头承担项目数量排名前10的单位分别是清华大学㊁北京大学㊁浙江大学㊁上海交通大学㊁复旦大学㊁华中科技大学㊁中山大学㊁中国科学技术大学㊁天津大学(并列第9)㊁同济大学(并列第9),均为我国 双一流 建设高校,科研基础深厚扎实,人才队伍和学科建设较为完善;科研院所牵头承担项目数量排名前10的单位分别是中国计量科学研究院㊁中国人民解放军总医院㊁中国科学院物理研究所㊁中国科学院深圳先进技术研究院㊁中国科学院合肥物质科学研究院㊁中国科学院动物研究所㊁中国科学院半导体研究所㊁中国标准化研究院㊁中国科学院生态环境研究中心(并列第9)㊁中国水利水电科学研究院(并列第9)㊁中国环境科学研究院(并列第9)㊁中国科学院高能物理研究所(并列第9),均为国家级科研院所,专注于特定领域研究时间较长,集聚了大量的科研人才和专业设备;企业牵头承担项目数量排名前10的单位分别是中国中车股份有限公司㊁长江勘测规划设计研究有限责任公司㊁中国石油化工股份有限公司㊁上海联影医疗科技有限公司㊁中国建筑科学研究院有限公司㊁中冶建筑研究总院有限公司(并列第6)㊁中兴通讯股份有限公司(并列第6)㊁中国汽车技术研究中心有限公司(并列第6)㊁中国建筑标准设计研究院有限公司(并列第6)㊁合肥通用机械研究院有限公司(并列第6),大部分为国有控股㊁国有全资㊁国有独资公司或央企,较少部分为高新技术企业㊂2.4㊀项目牵头单位所在区域分布情况㊀㊀按照国家重点研发计划项目牵头承担单位所在省/自治区/直辖市进行区域统计分析,2016 2022年间,共有33个省/自治区/直辖市承担了国家重点研发计划任务(见图3),即除台湾省外其他所有区域均承担了国家重点研发计划项目㊂承担项目数量排名前10的区域依次为北京㊁上海㊁江苏㊁广东㊁湖北㊁浙江㊁山东㊁天津㊁陕西和辽宁,其中北京承担项目数量最多,超过了全部国家重点研发计划项目数量的1/3;北京㊁上海㊁江苏㊁广东4个区域是国家重点研发计划项目分布密集区域,合计承担项目数量超过了总量的60%㊂3㊀部分区域承担项目情况对比分析㊀㊀根据各区域承担国家重点研发计划项目数量统计情况,本文选取上海㊁江苏㊁广东㊁浙江4个承担项目数量相近又较为密集的区域开展对比分析㊂2016 2022年间,上海㊁江苏㊁广东㊁浙江4个区域共牵头承担了2388项国家重点研发计划项目㊂从逐年牵头承担项目数量(见图4)上看,上海一直保持第1位,浙江在4个区域中排第4位,江苏在2019年低于广东,其他年份均排在第2位㊂总体上,4个区域承担项目数量年度间变化情况比较相似㊂从项目类型(见图5)上看,4个区域牵头承担的项目领域方向分布较为相似,社会发展领域占比35%左右,高新技术领域占比30%左右,基础研究领域占比20%~32%,农村科技领域占比4%~15%㊂从项目牵头承担单位性质与数量(见表4)上看,上海㊁江苏和广东牵头单位数量相近,约为180家单位,浙江牵头单位数约为上述3个区域的60%;浙江的高等院校㊁科研院所㊁企业数量均为4个区域最低,其中科研院所和企业数量较其他3个区域差别较大㊂根据4个区域牵头承担项目数量与牵头单位数量㊀㊀表3㊀2016 2022年各类型项目牵头单位承担国家重点研发计划项目数量前10单位情况(a)高等院校排名名称项目数量/项1清华大学2222北京大学2083浙江大学1844上海交通大学1785复旦大学1376华中科技大学1117中山大学1098中国科学技术大学1009天津大学909同济大学90(b)科研院所排名名称项目数量/项1中国计量科学研究院572中国人民解放军总医院483中国科学院物理研究所414中国科学院深圳先进技术研究院365中国科学院合肥物质科学研究院366中国科学院动物研究所347中国科学院半导体研究所308中国标准化研究院289中国科学院生态环境研究中心279中国水利水电科学研究院279中国环境科学研究院279中国科学院高能物理研究所27(c)企业排名名称项目数量/项1中国中车股份有限公司132长江勘测规划设计研究有限责任公司113中国石油化工股份有限公司104上海联影医疗科技有限公司105中国建筑科学研究院有限公司86中冶建筑研究总院有限公司76中兴通讯股份有限公司76中国汽车技术研究中心有限公司76中国建筑标准设计研究院有限公司76合肥通用机械研究院有限公司7情况,可以计算4个区域各项目牵头单位平均承担国家重点研发计划项目数量,上海㊁江苏㊁广东㊁浙江分别为4.8项㊁3.5项㊁3.2项和3.5项,上海平均值最图3㊀各省/自治区/直辖市承担国家重点研发计划项目数量分布图4㊀上海㊁江苏㊁广东㊁浙江逐年承担国家重点研发计划项目数量分布高,其他3个区域较相近,即上海各牵头承担单位的科研综合能力或持续科研能力较强㊂4㊀结论与展望㊀㊀值得关注的是, 十四五 国家重点研发计划项目类型更加丰富多元,除了常规公开竞争类项目,还设置了鼓励从事探索性㊁原创性研究的青年科研人员脱颖而出的青年科学家项目,为提升科研投入绩效㊁强化重大创新成果 实战性 的 揭榜挂帅 项目,以及鼓励地方联合投入㊁协同管理的部省市联动项目,不同类型项目对申报人及申报单位的要求㊁课题设置以及项目评审立项机制都有相应区别,能够更大范围地鼓励科研人员承担国家重大科研任务,推动科研成果落地实施㊂通过对2016 2022年我国重点研发计划项目立图5㊀上海㊁江苏㊁广东㊁浙江承担国家重点研发计划项目按领域方向统计分布表4㊀上海㊁江苏㊁广东㊁浙江承担国家重点研发计划项目牵头单位情况单位:个区域高等院校科研院所企业其他合计上海1755974173江苏25321203180广东16511023172浙江1416761107项情况的统计分析,结合国家重点研发计划项目申报立项与实施管理,本文形成一些建议如下㊂(1)继续加强科研资源战略引导作用㊂国家重点研发计划是我国重大科技计划的先行者,发挥着我国科技事业改革前进的探索和引路重要作用㊂当前,国家重点研发计划项目主要集中于北京㊁上海㊁江苏㊁广东㊁湖北㊁浙江等科研资源密集区域,其他地区承担国家重点研发计划项目较少,呈现科技资源分布不均衡的特点㊂因此,要继续加强国家重点研发计划的战略引导作用,围绕区域社会经济㊁科技创新发展现状和趋势需求,以科技辐射带动区域发展㊂(2)促进产学研合作,推动成果转化实施㊂从国家重点研发计划项目承担单位性质上看,高等院校和科研院所是主要承担单位,企业占比不到20%㊂高等院校和科研院所是基础研究㊁重大科技创新的主力军和策源地,企业尤其是科技企业是成果转化应用的试验田㊂应更加注重高等院校㊁科研院所和企业之间的产学研究与合作,促进重点研发计划项目从研究到应用的全链条一体化管理,为我国社会经济发展不断注入科技供给力㊂(3)不断创新管理方式,提升服务保障能力㊂国家重点研发计划目标定位高㊁研究任务重㊁经费规模大㊁管理环节多,因此更加需要通过创新管理方式,一方面建立一支高素质管理队伍,为项目从申报㊁实施到结题验收等环节提供全方位的服务保障;另一方面以激发科研人员创新活动为目标,完善科研项目和经费等管理制度,扩大科研人员自主权㊂参考文献[1]国务院.国务院印发关于深化中央财政科技计划(专项㊁基金等)管理改革方案的通知[EB/OL]. (2014-12-03)[2023-01-12].https:/// zhengce/content/2015-01/12/content_9383.htm. [2]国务院.国务院关于改进加强中央财政科研项目和资金管理的若干意见[EB/OL].(2014-03-03) [2013-01-12].https:///zhengce/ content/2014-03/12/content_8711.htm.[3]金振蓉,杨舒.国家科技计划管理重大思路转变政府退后+五类计划[N].光明日报,2015-01-08 (5).[4]侯婉莹,刘蓉蓉,戴培刚,等.对国家重点研发计划组织管理的思考与建议[J].农业科技管理,2017 (2):18-21.[5]科技部,财政部.科技部财政部关于印发‘国家重点研发计划管理暂行办法“的通知[EB/OL].(2017-06-22)[2023-01-12]./ xxgk/xinxifenlei/fdzdgknr/fgzc/gfxwj/gfxwj2017/ 201706/t20170628_133796.html.(编辑㊀李春燕)Analysis of the approval of National Key R&D Program of China from2016to2022Xie JinyuanScience and Technology Department Nanjing University Nanjing210093 ChinaAbstract The National Key R&D Program is a major strategic measure for China s scientific and technological reform and innovation.Since its implementation in2016 it has gradually become an important channel for China to solve major strategic scientific and technological problems and serve the national socio-economic development.The article takes the National Key R&D Program from2016to2022as the research object and conducts statistical analysis from the fields of the project the regions and nature of the leading undertaking units etc.Furthermore it puts forward thoughts and suggestions from the aspects of focusing on the strategic layout of China s key research and development plan strengthening industry-university-research cooperation and innovation management system.Key words National Key R&D Program of China project initiation analysis research management。
2020年度广东省重点领域研发计划“社会治理体系现代化与治理能力提升”重点专项技术就绪度评价标准及细则
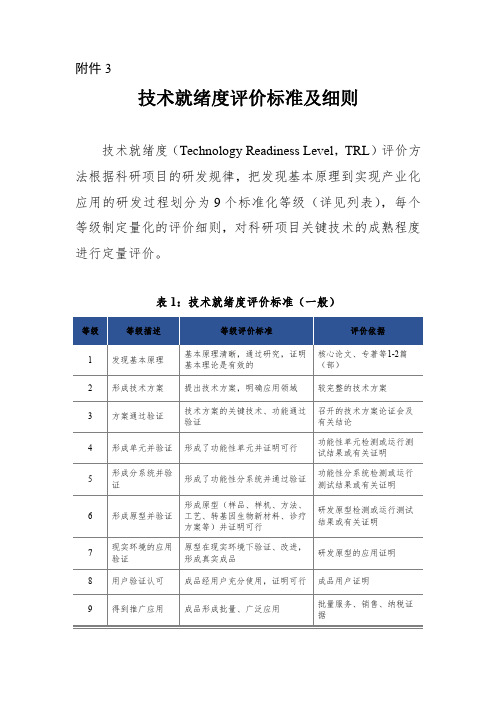
附件3技术就绪度评价标准及细则技术就绪度(Technology Readiness Level,TRL)评价方法根据科研项目的研发规律,把发现基本原理到实现产业化应用的研发过程划分为9个标准化等级(详见列表),每个等级制定量化的评价细则,对科研项目关键技术的成熟程度进行定量评价。
表1:技术就绪度评价标准(一般)表2:“一般硬件”技术就绪度评价细则TRL1:明确该技术有关的基本原理,形成报告评价细则权重在学术刊物、会议论文、研究报告、专利申请等资料中公布了可作为项目研究基础50%的基本原理明确了基本原理的假设条件、应用范围50% TRL2:基于科学原理提出实际应用设想,形成技术方案评价细则权重明确技术的基本要素及构成特性30%初步明确技术可实现的主要功能50%明确产品预期应用环境20% TRL3:关键功能和特性在实验室条件下通过试验或仿真完成了原理性验证评价细则权重形成完善的实施方案,有明确的目标和指标要求30%通过试验或仿真分析手段验证了关键功能的可行性40%理论分析了系统集成方案的可行性10%形成完善的项目开发计划10%评估产品预期需要的制造条件和现有的制造能力10% TRL4:关键功能试样/模块在实验室通过了试验或仿真验证评价细则权重完成基础关键功能试样/模块/部件的开发30%在实验室环境下通过各基础关键功能试样/模块/部件的功能、性能试验或仿真验证30%试制了关键功能试样/模块/部件10%对各关键功能试样/模块/部件进行系统集成10%评估关键制造工艺10%关键功能试样/模块/部件设计过程文档清晰10% TRL5:形成产品初样(部件级),在模拟使用环境中进行了试验或仿真验证评价细则权重完成各功能部件开发,形成产品初样35%在模拟使用环境条件下完成产品初样的功能、性能试验或仿真验证35%功能部件设计过程文档清晰10%确定部件生产所需机械设备、测试工装夹具、人员技能等10%确定部件关键制造工艺和部件集成所需的装配条件10% TRL6:形成产品正样(系统级),通过高逼真度的模拟使用环境中进行验证评价细则权重形成产品正样,产品/样机技术状态接近最终状态35%在高逼真度的模拟使用环境下通过系统产品/样机的功能、性能试验或仿真验证35%设计工程试验验证及应用方案5%系统设计过程文档清晰,完成需求检验10%确定系统产品/样机的生产工艺及装配流程10%确定生产成本及投资需求5% TRL7:形成整机产品工程样机,在真实使用环境下通过试验验证评价细则权重完成系统产品/样机的工程化开发30%在实际使用环境下完成系统产品/样机的功能、性能试验验证30%系统产品/样机开展应用测试10%产品/样机生产装配流程、制造工艺和检测方法等通过验证10%建立初步的产品/样机质量控制体系或标准10%验证目标成本设计10% TRL8:实际产品设计定型,通过功能、性能测试;可进行产品小批量生产评价细则权重实际产品开发全部完成,技术状态固化30%产品各项功能、性能指标在实际环境条件下通过测试30%完成产品使用维护说明书10%所有的制造设备、工装、检测和分析系统通过小批量生产验证15%关键材料或零部件具备稳定的供货渠道15% TRL9:系统产品批量生产,功能、性能、质量等特性在实际任务中得到充分验证评价细则权重产品的功能、性能在实际任务执行中得到验证30%所有文件归档10%所有的制造设备、工装、检测和分析系统准备完毕10%产品批量生产20%产品合格率可控20%建立售后服务计划10%表3:“软件”技术就绪度评价细则TRL1:明确基本原理和算法,完成可行性研究。
2018~2019年度广东省重点领域研发计划“智能机器人与装备制造”重大科技专项申报条件、时间、流程

2018~2019年度广东省重点领域研发计划“智能机器人与装备制造”重大科技专项申报条件、时间、流程申报要求(一)申报单位主要为广东省内注册的创新主体,包括科研院所、高校、企事业单位和行业组织等;鼓励港澳地区高校院所作为牵头单位或独立申报;欢迎全国具备相应条件和能力的企事业单位申报,项目评审与立项过程按照相关规定与广东省内单位平等对待。
鼓励以企业为主体,产学研结合,联合相关优势单位进行申报。
如企业作为牵头单位,必须是高新技术企业或大型龙头骨干企业,建有研发机构,在本领域拥有国家级、省部级重大创新平台,且以本领域领军人物作为项目负责人,项目总投入中自筹经费一般不少于70%。
省外单位牵头申报的,与省内单位公平竞争,择优纳入科技计划项目库中管理;入库的项目在满足吸纳广东单位参与到项目研发中(承担的工作量不少于30%)、在广东注册落户或团队加入广东省内单位、科研成果向广东单位转移转化等条件之一后,正式列入省级科技计划,拨付项目资金。
(二)项目内容真实可信,不得夸大自身实力与技术、经济指标,各单位须对申报资料的真实性负责,并提供申报材料真实性承诺函。
项目一经立项,将根据申报书内容转化生成合同书,无正当合理的依据不予修改调整。
(三)有以下情形之一的项目负责人或申报单位不得进行申报或通过资格审查:1.项目负责人或企业法人有广东省级科技计划项目3项以上(含3项)未完成结题的或有项目逾期一年未结题的(平台类、普惠性政策类、后补助类项目除外);2.在省级财政专项资金审计、检查过程中发现重大违规行为的;3.同一项目通过变换课题名称等方式进行多头申报的;4.项目主要内容已由该单位单独或联合其他单位申报并已获得省科技计划立项的;5.省内单位项目未经主管部门组织推荐的;6.有严重失信行为记录和相关社会领域信用“黑名单”记录。
(四)申报单位应认真做好经费预算,按实申报,且应符合申报指南有关要求。
申报方式符合申报条件的企事业单位通过“广东省政务服务网”或“省科技厅阳光政务平台”提交有关资料进行申报。
广东省重点领域研发计划2020年度新一代人工智能重大专项申报指南(征求意见稿)

附件1广东省重点领域研发计划2020年度新一代人工智能重大专项申报指南(征求意见稿)为紧抓“新基建”战略机遇,推动人工智能赋能实体经济,按照《广东省新一代人工智能发展规划》部署,面向人工智能领域的核心科技创新与攻关需求,结合我省在智能计算布局、开放创新平台建设、场景应用等方面已有基础,着力推动人工智能基础理论、核心技术等向实践应用充分转化。
本专项围绕人工智能发展亟待突破的关键技术领域,力争取得一批标志性成果,推动广东在开放创新、核心技术和场景应用等方向实现自主研发、科技自立。
2020年指南共设置三个专题12个任务,拟支持不超过15项,部分项目拟选取该领域有优势的单位定向委托实施。
专题一:智能计算关键技术研究及应用项目 1.1:面向规模视觉处理的开放计算框架研究及系统应用(一)研究内容。
自主研发面向视觉处理的深度学习计算框架,可兼容主流的开源框架,实现针对视觉模型训练和推理性能优化与强化;开发大规模模型训练平台,研究适配机器学习的前编译与即时编译能力,分别研究深度学习计算框架、高速大数据存储引擎、数据管理与标注平台、大规模分布式训练任务调度、人工智能集成研发环境的优化方案,并研究整体融合优化方案。
研究基于深度学习的视觉计算开放平台的开放模式,研究开放平台对不同视觉计算需求的适应能力。
(二) 考核指标。
自主研发内嵌编译器、核心引擎、数据IO引擎的深度学习训练框架,可兼容PyTorch等主流开源训练框架;同等环境下对比PyTorch等主流开源训练框架提升训练性能30%以上,可支持不低于1000个处理器并行计算。
利用该框架针对残差神经网络(ResNet)等视觉模型进行计算,可实现在百万视觉处理数据集上完整训练90轮(epoch)时间小于60s;该框架可支持即时编译实现求导代码自动生成,支持国产芯片计算架构,支持多种设备量化格式的量化训练,以及量化模型的直接输出。
基于该框架构建视觉处理系统具备存储访问能力不低于300万IOPS。
2019~2020年度广东省重点实验室申报指南
附件2019~2020年度广东省重点实验室申报指南专题一:学科类省重点实验室建设(专题编号:20191203)。
(一)专题背景。
学科类省重点实验室是高水平基础与应用基础研究重要平台,是聚集和培养优秀科技人才的重要基地。
学科类省重点实验室包括广东省重点实验室(学科类)和省市共建广东省重点实验室(学科类),其中省市共建广东省重点实验室(学科类)采用省市联动共建、地市投入为主的方式建设,为我省区域优势特色产业发展提供知识储备和技术支撑。
本专题围绕新一代信息技术、高端装备制造、绿色低碳、生物医药、数字经济、新材料、海洋经济、现代种业与精准农业、现代工程技术等战略性新兴产业发展需求及社会民生重大问题,建设学科类省重点实验室。
(二)申报要求。
1.建设基础要求。
重点实验室应围绕研究领域,聚焦研究方向和研究内容,近、中、远期目标清晰。
研究内容与已有省重点实验室不重叠。
其建设基础应符合以下要求:(1)实验室负责人应符合下述条件之一:A.2016~2018年主持过1项资助金额为200万元及以上的国家级基础类科研项目;B.2016~2018年主持过1项资助金额为300万元及以上的国家级研发类科研项目;C.2016~2018年主持过1项资助金额为500万元及以上的省级科技计划项目或1项省自然科学基金研究团队项目。
(2)研究团队:固定在职研究人员不少于20人,研究团队配置合理。
固定研究团队2016~2018年承担省部级以上科研项目不少于10项,项目总金额1000万元及以上。
(3)科研设施:实验室使用场地相对集中,原则上须符合《广东省科学技术厅关于省重点实验室建设与运行的管理办法》中关于实验室面积和科研仪器相关要求。
(4)以往成果:实验室整体科研水平达到国内先进水平,代表性成果国内领先,应提供2014年以来的5项代表性成果。
(5)开放合作:实验室仪器设备提供对外开放服务,实验室应设立开放课题和开放基金,须有实质性的国内外学术交流合作,有产学研合作机制。
广东省重点领域研发计划2018-2019年度精准农业重点专项申报指南
附件4广东省重点领域研发计划2018-2019年度 “精准农业”重点专项申报指南精准农业是以信息化、数字化和人工智能技术为支撑的新型现代化农业生产系统。
本专项按照“统筹规划、夯实基础、有限目标、重点突破”的原则,通过对物联网、大数据、人工智能等技术手段的集成应用和产学研协同攻关,围绕水稻、蔬菜、水果、茶叶、畜禽和水产六大产业链,突破数字化农业技术、农业前沿技术等领域关键技术,研发具有自主知识产权的技术与成果,力争到“十三五”末,构建覆盖广东主要农业产业的精准农业技术体系,促进农业高质高效绿色发展,为乡村振兴发展提供科技支撑,加快广东省农业现代化进程。
各专题以项目为单位申报,项目实施期一般为3-5年。
具体指南如下:专题一:作物生产信息感知与管控关键技术研究与示范(专题编号:0214)开展作物生产多维信息感知大数据平台、田间作物生长精准管控关键技术、设施园艺作物精准调控关键技术、基于大数据和区块链的果蔬产品溯源系统研究。
项目1:作物生产多维信息感知大数据平台示范应用(一)研究内容研发主产作物生产环境与生长信息感知异构物联网技术。
研究广东主产作物生长与生产环境信息接入标准、精准管控技术标准、数据采集规范和大数据平台接入规范;研究作物生产环境、生长及生态信息采集感知技术与系统,集成开发作物环境、生长及生态等新型传感器件的多功能接口,多维度集成卫星、遥感和传感器等多种感知的作物信息感知技术,并进行田间应用。
构建主产作物生产信息多维感知大数据平台。
研究主产作物生产信息基础数据库、智能感知与精准解析系统,建立田间“四情”(苗情、墒情、虫情、灾情)监测预警体系;研究作物长势、产量、品质以及抗性受环境、气候、耕作时间、耕作模式与病虫草害胁迫的精准管控方法与模型;研究作物土壤环境因子与其长势、产量及品质互作机理的大数据深度挖掘模型,构建主产作物生产信息与环境多维信息感知共享服务大数据平台,并进行试点应用。
(二)考核指标1.突破土壤特征信息和作物生长快速采集、原位监测、信息决策关键技术3-5项。
2020年0809广东省公务员考试《申论》真题(县级卷)参考答案及解析

2020年0809广东省公务员考试《申论》真题(县级卷)一、注意事项1.本题本由给定资料与作答要求两部分构成。
考试时限为120分钟。
2.请在题本、答题卡指定位置上用黑色字迹的钢笔或签字笔填写自己的姓名和准考证号,并用2B铅笔在准考证号对应的数字上填涂。
3.请用黑色字迹的钢笔或签字笔在答题卡上指定的区域内作答,超出答题区域的作答无效!4.待监考人员宣布考试开始后,方可开始答题。
5.所有题目一律使用现代汉语作答。
未按要求作答的,不得分。
6.监考人员宣布考试结束时,应立即停止作答,将题本、答题卡和草稿纸都翻过来留在桌上,待监考人员确认数量无误、允许离开后,方可离开。
二、给定材料材料11979年,中国改革开放的第一声春雷在深圳蛇口炸响。
此后的四十年,深圳以奇迹般的速度迅猛发展,由一个“小渔村”迅速发展为一个实际人口超过2000万的现代化大都市。
先行先试,大胆探索,是深圳的基因和使命。
《中共中央国务院关于支持深圳建设中国特色社会主义先行示范区的意见》提出,支持深圳高举新时代改革开放旗帜、建设中国特色社会主义先行示范区,为深圳促进社会治理现代化明确了方向,注入了动力。
近年来,深圳在社会治理上呈现出许多新的亮点。
从统一政务服务平台“i深圳”APP,到早晚高峰期间只允许载有2人以上车辆驶入的“多乘员车道”,再到“人脸识别”查处非机动车闯红灯……一个个深圳“网红”的背后,都是深圳社会治理的智慧与创新。
不依靠信息技术,不在创新上下功夫,很难想象仅靠有限的人力、物力而能高效地治理越来越庞大的城市。
2019年,深圳正式出台《深圳市新型智慧城市建设总体方案》,逐步综合应用大数据、云计算、人工智能等技术,提高社会治理智能化专业化水平,加快建设智慧城市。
目前,深圳市政务信息资源共享平台每天数据交换量超过2000万条,峰值达到近8000万条。
“这些数据每交换一次,可能就有1个市民少跑一次办事窗口,少盖一个章。
”深圳市经济贸易和信息化委员会负责人说。
弘扬“南山风格” 打造高水平科研与临床转化平台——专访广州呼吸健康研究院副院长郑劲平

H1N1、H7N9、H5N6、MERS、新冠 冠肺炎疫情阻击战中,呼研院重点
在 重 症 患 者 救 治 方 面, 呼 研
肺炎等重症患者过程中,呼研院厚 开展了哪几方面的工作,发挥了什 院成功实施我省首例体外膜肺氧合
积薄发、勇挑大梁,在领军人物钟 么作用?
ECMO 新冠患者转运,创造111天
南山院士的带领下,坚持基础研究
药品还需通过临床来证实,临床研
月至2020年12月,我们在全国组
究确认它有效安全才能进行新药
织举办了308场次的“肺功能规范
《广东科技》:呼研院从基础 开发。
化培训万里行”活动,超过1万家 研究到临床研究的系列性研究成果
呼研院的几个代表性成果也都
医院的2.5万余名人员参加了系统 突出,在防治新冠肺炎的工作中, 遵循基础研究与临床研究的双转化
临床特征和预后判断,为全球同行 研究、大数据分析与AI 应用,以及 年科学基金获得者1人、国家优秀青
提供参考,研究结果发表后3个多 适宜技术推广等;由卫健委主管的 年科学基金获得者1人。创新性地开
月内被引超过2600次,主要结论 国家呼吸医学中心主要进行疑难诊 办南山班、南山学院,将医学人才
被写入世界卫生组织新冠临床救 断及重症救治、分级诊疗及远程医 培养前延至本科教育阶段,建设26
治指南;构建全球首个非转基因小 疗、诊疗技术创新等工作,体现政 个亚专业,满足学科多元化发展需求。
鼠动物模型,有效缓解了动物模型 策及行政引导。国家重点实验室每5
二是建设国家级呼吸健康大
缺乏的难题,证实免疫机制对新冠 年评估一次,我们在2017年的评估 数据平台。实施国家重点研发计划
肺炎的影响以及Ⅰ型干扰素、血浆 中被评为优秀,国家临床研究中心 2018年定点专项“呼吸系统疾病
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附件1广东省重点领域研发计划2019年度“现代工程技术”重点专项申报指南(征求意见稿)为全面贯彻落实《“十三五”国家科技创新规划》《粤港澳大湾区发展规划纲要》《广东省“十三五”科技创新规划》等文件精神,着力推动党的十九大提出的科技强国、质量强国、制造强国、交通强国等国家战略,践行创新、协调、绿色、开放、共享发展理念,推进粤港澳大湾区高起点、高标准、高质量建设与升级发展,拟启动实施广东省重点领域研发计划“现代工程技术”重点专项。
本专项以广东现代工程产业发展需求为导向,以两化融合为基础,以提质增效、绿色发展为中心,以实现现代工程领域高质量发展及为人民提供高质量基础设施服务为目标,聚焦交通、建筑、水利、电力行业,重点围绕核心关键技术、行业共性关键技术、产品和装备研发3个方面进行产业链及创新链部署、一体化推进,瞄准国际前沿,集聚优势团队,大力提升我省及我国现代工程领域关键技术水平,引领原创成果重大突破,为粤港澳大湾区基础设施网络建设和完善,促进粤港澳大湾区互联互通及快速发展提供强有力科技支撑,推进创新型国家和科技强国建设,提升国际竞争力。
2019年度支持专题及项目方向如下。
专题一、高难度城市地下空间开发及复杂环境下隧道工程建设方向1:繁华城区地铁暗挖车站关键技术(一)研究内容。
针对繁华城区土软、地层变形难以预测等特点,研究暗挖施工过程中强化土体的力学特性及渗透特性的演化规律;建立三圆或多圆盾构车站结构计算模型,研究三圆或多圆盾构车站防水设计成套方案,研发三圆或多圆盾构装备;研发适应多洞组合顶管法的施工机械;研发小口径曲线管幕机装备;研发基于BIM技术开展设计和施工信息化管理、仿真和风险分析的软件平台;开展全机械化(或机械化施工为主)的暗挖地铁车站工程应用示范。
(二)考核指标。
形成繁华城区地铁暗挖车站设计理论和方法,提出地铁车站暗挖施工技术标准1~2项,提出地层沉降控制技术措施1项;形成三圆或多圆盾构车站施工工法1项,其中三圆或多圆盾构装备施工速度不低于5米/天;研制多洞组合顶管设备的施工速度不低于5米/天,设备完好率不低于92%,顶管分部施工可适应的狭小隧道间距的能力达到隧道间距0.1米,轴线偏差不超过±0.03米;研制曲线管幕机的轴线控制精度的轴线偏差不超过±0.03米;研发基于BIM的风险分析管理软件1套,实现基于BIM的地铁暗挖车站全过程仿真模拟和全生命周期管理,实现地铁暗挖车站周边环境快速建模、实时动态监测、预警分析及施工场地、人员智能化管理;开展三圆(多圆)盾构、或多洞组合顶管技术、或曲线管幕技术暗挖车站的工程应用示范,研制装备样机的性能测试按照相应的施工工法来验证;制/修订行业或地方技术标准不少于1项,申请发明专利不少于5项,申请软件著作权不少于3项。
(三)申报要求。
1.项目须覆盖全部研究内容及考核指标;2.必须企业牵头申报,鼓励产学研联合申报;3.项目实施地点须在广东省内。
(四)支持方式。
项目实施周期3~5年。
拟支持1项。
方向2:复杂海洋环境下钢壳混凝土沉管隧道建设关键技术(一)研究内容。
揭示钢壳混凝土沉管隧道力学行为及使用性能,构建设计理论与方法,提出关键合理构造;揭示钢壳混凝土沉管钢壳腐蚀机理,构建钢壳混凝土结构长寿命耐久性保障设计方法与防护技术;研发推出式最终接头实现技术、钢壳混凝土沉管隧道高精度沉放对接控制技术、高稳健自流平混凝土制备及施工技术;研制钢壳混凝土沉管隧道管节浮运安装一体船、适应珠江口大回淤特性的自升式碎石整平清淤专用装备等施工关键装备及可靠无损检测装备;建立建设环境监测技术体系,开发精准预警预报系统平台。
(二)考核指标。
阐明钢壳混凝土沉管隧道力学行为特性,提出钢壳混凝土沉管隧道抗剪抗弯设计理论及方法,提出钢壳混凝土沉管隧道新型抗剪连接件构造形式1项;阐明钢壳混凝土沉管结构钢壳电化学腐蚀发生发展规律,创建使用年限100年的钢壳混凝土结构寿命设计方法,提出设计使用年限100年、具有自感知功能的钢壳混凝土结构耐久性防护新技术;形成钢壳混凝土沉管隧道推出式最终接头施工新工法1项,实现钢壳混凝土沉管隧道沉放厘米级对接控制,自主制备的自密实混凝土工作性能保持时间不低于90分钟、泵送距离不低于120米;研制具有360度回转功能、适应1.6节横流、浮运速度不小于4节的管节浮运安装一体船1套,研制移动整平速度不低于5米/分钟、水深不低于30米环境下整平高差小于±4厘米的自升式碎石整平清淤专用装备1套,研制钢壳混凝土沉管隧道毫米级脱空无损可视化检测设备1套,并实现实体工程应用;完成一座实体工程建设环境监测精准预警预报系统平台建设与应用;完成钢壳混凝土沉管隧道实体工程应用示范1项;制/修订行业或地方技术标准不少于2项,申请发明专利不少于5项,申请软件著作权不少于3项。
(三)申报要求。
1.项目须覆盖全部研究内容及考核指标;2.鼓励产学研联合申报;3.项目实施地点须在广东省内。
(四)支持方式。
项目实施周期3~5年。
拟支持1项。
专题二、重大跨海交通集群工程智能运维与安全保障方向3:重大跨海通道全寿命周期安全保障关键技术(一)研究内容。
深化跨海重大基础设施混凝土浇筑-成长机理、服役性能研究,构建大体积混凝土无开裂控制技术体系与方法,研究寿命适配、经济可靠的耐久性保障新技术及措施;深化悬索桥主缆腐蚀机理和长效防护性能研究,提出主缆长效可靠防护新技术及体系;深化大型钢结构焊接疲劳性能研究,研发高品质焊接接头和抗疲劳开裂的正交异性桥面体系;揭示跨海重大交通基础工程结构长期性能演化机理,研究跨海重大交通基础设施全寿命周期质量检验评定方法与标准。
(二)考核指标。
提出基于混凝土成长机理和性能劣化的水泥水化热调控、复合膨胀补偿收缩等新技术,实现大体积混凝土浇筑-结硬过程的无开裂控制,提出使用寿命不少于50年、具有自感知功能的混凝土耐久性保障新技术;研制具有自感知、自调节、自保护功能的主缆耐久性保障新技术,实现主缆钢丝100年内不腐蚀,实现实体工程应用;揭示现行钢结构桥梁正交异性桥面板疲劳损伤机理,提出采用U肋全熔透高品质焊接接头的新型桥面体系及焊接质量验收标准1~2项;形成跨海重大交通基础设施全寿命周期质量检验评定方法与标准,建立“平安百年品质工程”质量控制和管理体系;制/修订行业或地方技术标准不少于5项,申请发明专利不少于7项,申请软件著作权不少于6项。
(三)申报要求。
1.项目须覆盖全部研究内容及考核指标;2.鼓励产学研联合申报;3.项目实施地点须在广东省内。
(四)支持方式。
项目实施周期3~5年。
拟支持1项。
方向4:重大跨海交通集群工程智能监测预警关键技术(一)研究内容。
研究粤港澳大湾区特殊环境(强风、浪潮、地震、潮湿、复杂随机车流)下重大跨海交通集群工程结构服役状态的全息智能感知理论及方法,研发基于无线传感网络的远程在线监测和智能感知系统;研究隧道、桥梁、人工岛、地下空间等工程的一体化三维动态建模技术;研究复杂多元环境下交通工程结构的损伤检测、状态监测和运营安全的大数据实时智能处置技术,以及基于少量传感器的结构状态实时评估技术;研发具有自主知识产权、新一代基础设施服役状态下智能感知、监测、识别、超高分辨率三维动态可视化、仿真、分析、评估、预警、决策与管理的一体化软件系统;研究重大交通基础设施的灾害预警、灾害控制、灾害预防的应急管理技术、方法等智能管控技术。
(二)考核指标。
提出粤港澳大湾区特殊环境下重大跨海交通集群工程结构服役状态的全息智能感知理论及方法1套,研发基于无线传感网络的远程在线监测和智能感知系统1套,编制有关技术指南1套;建立隧道、桥梁、人工岛、地下空间等工程的一体化三维动态模型1套;提出复杂多元环境下交通工程结构的损伤检测、状态监测和运营安全的大数据实时智能处置技术2项以上,结构损伤识别准确率不低于85%,实现处理噪声水平不高于6db信噪比数据,开发桥梁异常状态发生时刻的数据驱动诊断方法1套;开发基于人工智能的重大交通基础设施服役状态在线监测、评估与预警的可视化平台软件系统1套,且状态评估时间分辨率达到1赫兹,系统反应不超过10秒,支持图像解析度不低于10亿像素超大图像的无损显示,动态响应速度小于0.1秒,同时实现结构模态参数在线自动识别及追踪,实时在线结果输出不超过10秒;建立涵盖桥岛隧交通集群工程的重大交通基础设施运营阶段灾害风险评估与应急管理理论体系1套(含跨境应急管理),提出极端事件下海底隧道交通流安全、隧道防火排烟保护及智能管控、桥梁主动防控方法及措施,在离岸海域桥岛隧集群工程示范应用不少于1座,应急预案覆盖率100%、运行指标动态管控率100%、状态异常预警准确率80%以上;制/修订行业或地方技术标准不少于1项,申请发明专利不少于10项,申请软件著作权不少于5项。
(三)申报要求。
1.项目须覆盖全部研究内容及考核指标;2.鼓励产学研联合申报;3.项目实施地点须在广东省内。
(四)支持方式。
项目实施周期3~5年。
拟支持1项。
专题三、绿色建筑工程及工业化应用方向5:海水海砂混凝土建筑结构关键技术(一)研究内容。
1.子方向一研究内容:研究采用外加电流阴极保护的新型钢筋纤维复材海水海砂混凝土构件;研究该类构件中纤维复材与海水海砂混凝土界面的粘结性能及劣化机理;研究该类构件的力学性能,探明其基本静力性能和疲劳、冲击和抗震等动力性能;研究粤港澳大湾区服役环境下该类构件的耐久性,探明荷载与环境耦合作用下该类构件长期性能的退化规律,并提出该类构件耐久性能提升方法,建立钢筋纤维复材海水海砂混凝土建筑结构的全寿命预测方法;开展钢筋纤维复材海水海砂混凝土建筑结构的工程应用示范。
2.子方向二研究内容:研究采用纤维复合材料筋替代钢筋的新型纤维筋复材海水海砂混凝土构件;研究该类构件中纤维复材与海水海砂混凝土界面的粘结性能及劣化机理;研究该类构件的力学性能,探明其基本静力性能和疲劳、冲击和抗震等动力性能;研究粤港澳大湾区服役环境下该类构件的耐久性,探明荷载与环境耦合作用下该类长期性能的退化规律,并提出该类构件耐久性能提升方法,建立纤维筋复材海水海砂混凝土建筑结构的全寿命预测方法;提升纤维筋复材海水海砂混凝土建筑结构的抗震延性;开展纤维筋复材海水海砂混凝土建筑结构的工程应用示范。
(二)考核指标。
1.子方向一考核指标:研发2种以上新型钢筋纤维复材海水海砂混凝土构件,研发1~2种高性能海水海砂混凝土制备工艺,提出30MPa~60MPa强度海水海砂混凝土配合比的设计方法1套;基于粤港澳大湾区服役条件,构建纤维复材与海水海砂混凝土界面的粘结滑移本构模型1套、劣化模型1套,实现纤维复材与海水海砂混凝土界面钻芯拉拔强度不低于2.1MPa;建立该类构件的承载力模型;建立加速老化实验与工程实际服役条件的等效模型,建立耐久性定量评价方法1套,明确钢筋纤维复材海水海砂混凝土建筑结构的劣化机理并建立该类结构在粤港澳大湾区服役的寿命预测模型1套,服役寿命不低于50年;在省内开展建筑面积不少于500平方米的海水海砂混凝土建筑结构工程应用示范1项以上,实现示范工程建设中海水海砂水溶性氯离子浓度不低于1%(按水泥用量的质量百分比计),淡水消耗降低90 wt%以上,建立海水海砂混凝土生产基地1个以上;相关研究成果被国际行业设计规范收录不少于1项,制/修订行业或地方技术标准不少于1项,申请发明专利不少于3项。