基于近似模型的车辆操纵稳定性及平顺性的优化研究
一种面向整车性能分解技术的多目标系统优化设计方法
一种面向整车性能分解技术的多目标系统优化设计方法.设计.计算.研究.一种面向整车性能分解技术的多目标系统优化设计方法谢骋王蠡任凯泛亚汽车技术中心有限公司【摘要】构建了一种面向整车操纵稳定性指标分解技术的智能化仿真计算及子系统性能参数优化设计的分析方法流程.归纳了面向级轿车悬架系统外特性参数的典型变化范围带宽,并探索出了一条子系统外特性参数对多个整车性能目标的优化技术路线。
运用方法、响应面方法以及基于响应面结果的多目标优化算法,得到了悬架子系统各特性参数对整车操纵稳定性目标的敏感性、贡献率、近似模型以及最优设计值。
主题词:整车性能技术分解多目标系统优化设计中图分类号:文献标识码:文章编号:. ?,“,.,】【】℃?,.. . , ? 彻 ,, ,订 .:啪, ?,? ,涉及数量众多的子系统控制变量和多个整车目标变前言量.即控制变量之间存在着复杂的耦合关系,控制变在车辆架构开发的前期阶段.需要根据市场调量和目标之间存在着较强的非线性关系。
若将所有控制变量和目标直接投入优化流程.其效率和计算结果研所确定的一系列操纵稳定性、平顺性等整车性能目标.来进一步得到各子系统总成如悬架、转向、制的精度都会很低。
因此.先运用方法筛选出对整动、轮胎等的设计指标。
本文综合应用和? 车优化目标具有显著影响且贡献率较大的子系统参数.然后利用这些参数建立响应面模型.在响应面分构建了一种智能化仿真和基于统计学方法的析基础上进行寻优并找到全局最优解决方案。
性能指标分析流程.并以悬架系统为例,在大量整车操纵稳定性客观试验数据的基础上.确立了一套操 . ?优化任务集成模块开发针对图中提到的“车辆模型和优化任务桥接纵稳定性技术指标作为底盘架构的开发目标.同时对近百余辆乘用车的悬架、减振器阻尼特性等的自动化计算流程”,解决了个问题:抽初始动力学模型中悬架系统特性参数识别及非线性特性数据资源进行了梳理.确定出作为设计变量的子系统特性参数。
操纵稳定性论文 (2)

汽车操纵稳定性的研究摘要:汽车操纵稳定性是决定汽车安全行驶的一个主要性能,本文主要论述了汽车操纵稳定性的研究进展及其影响因素,然后通过试验(稳态回转试验、转向回正试验等等)对汽车操纵稳定性进行定性测定和评价,并提出了汽车操纵稳定性研究存在的问题及发展前景。
关键词:汽车;操纵稳定性;影响因素;评价;试验The Research of the VehicleHandling and StabilityAbstract: The vehicle handling and stability is decided to the safety driving of a major performance, this paper mainly discusses the research progress of the vehicle handling and stability and its influence factors, and then through the test (steady-state test, turning back to the positive test, etc.) on the vehicle steering and stability for qualitative determination and evaluation,and puts forward the vehicle handling and stability the problems of the research and development prospects.Key words:car; handling and stability; influencing factors; evaluation; test引言汽车操纵稳定性是指驾驶者在不感到过分紧张、疲劳的条件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰并保持稳定行驶的能力[1]。
基于ADAMS的汽车平顺性仿真分析

基于ADAMS的汽车平顺性仿真分析贺翠华,王树凤(山东理工大学交通与车辆工程学院,山东淄博255049)摘要:本文利用动力学仿真软件ADAMS对汽车的平顺性进行了分析。
首先在view中建立了车身与车轮双质量二自由度振动模型,然后用vibration模块对其进行了振动仿真分析。
分别研究了悬架刚度、悬架阻尼系数、非悬挂质量和轮胎刚度对平顺性的影响。
结果表明,在相同的路面输入下,通过合理选择悬架和轮胎参数可以明显改善汽车平顺性。
关键词:平顺性;仿真;性能评价;虚拟样机技术The Research of Vehicle Riding Comfort Based onADAMSHE Cui-hua;WANG Shu-feng(School of Transportation and Vehicle Engineering,Shandong University of Technology,Zibo China255049)Abstract:The riding comfort is one of the most important performances of vehicle.This paper analyses the vehicle riding comfort performance using ADAMS/view.According to the vehicle vibration theory,the vehicle is simplified to a dual mass model with two freedoms.The simulation of the model is carried out using ADAMS/Vibration.The influence of suspension stiffness,damping,body mass and tire stiffness on the comfort has been investigated.The result shows that choosing the appropriate parameters of suspension and tire can improve the vehicle riding comfort performance. Key words:riding comfort performance;simulation;performance assessment1引言随着汽车车速的提高,汽车的乘坐舒适性越来越受到人们的重视,而汽车的乘坐舒适性与汽车的平顺性息息相关。
提高车辆稳定性控制系统STEERABILTY、横向稳定性和侧倾稳定性

提高车辆稳定性控制系统STEERABILTY、横向稳定性和侧倾稳定性摘要:车辆稳定性控制系统是一种主动的安全系统,为防止事故发生并利用微分制动器产生人工横摆力矩稳定车辆的机动而设计。
在本文中,为了提高车辆的操纵性,横向稳定性,和侧倾稳定性,每个参考横摆角速度的设计和组合到目标横摆角速度都取决于驾驶情况。
偏航角速度控制器的设计以及跟踪目标横摆角速度都是基于滑模控制理论。
横摆角速度控制器所需的总的横摆力矩以及每个制动器压力的合理分布,都由有效控制车轮决定。
估计算法是一种可以识别出滚动角和车身侧滑角的简化动力学模型和参数自适应的方法。
本文中所提出的车辆稳定性控制系统和估计算法的性能与仿真结果可以验证实验结果。
关键词:车辆稳定性控制系统,目标横摆角速度,角速度控制器,制动力分配,滚动角估计,车身侧滑角估计1.介绍有一个日益需求的主动安全系统,通过人工干预的方法以防止或减少事故的发生(You et al .,2006)。
这个系统超出仅仅最小化损失事故的被动安全概念,它的必要性日益被市场所公认。
因此, 近年来进行了不同的地面上车辆主动安全系统的研究。
尽管有其他替代技术保护车辆的稳定性,例如4 ws(四轮引导),AFS(主动前轮引导),后轮转向,和微分牵引(Song et al .,2007),最近的主流车辆安全系统是集中在制动差动和制动干预。
这主要是从硬件现有的可靠性和成本效率出发考虑得出的结果。
现有的技术成果有ABS(防抱死制动系统)和TCS(牵引力控制系统)以及在制动/加速度时持有车轮滑转线性滑动。
在这里假设车辆配备了差动制动系统,因此, 本文提出了车辆稳定控制系统主要研究通过生成与控制车辆的横摆力矩差动制动在四个车轮。
本文使用的横摆角速度是一个控制变量。
由于车辆的车身侧偏角可以使横摆角速度稳定控制在一个适当的参考横摆角速度,使车身侧滑角动力转变成稳定的内部动力(You et al .,2006)。
同样,翻车的风险可以通过稳定辊动力学和控制横摆率减轻。
车辆动力学稳定性控制的控制原理与控制策略研究
卜\、、
图3翻偏角稳定性准则
1£i
——施加VDsc控■
2车辆动力学稳定性控制的控制策略
t释龋足椒
一
根据上面的车辆动力学稳定性控制的控制原 理,提出图4所示的车辆动力学稳定性控制策略。 图4中妒为根据方向盘转角传感器测出的方向盘
。瓜、=加一跏一. 一V一二//”一1
一+
¨目f,。 (吣方向量转角
转角,t,为根据轮速传感器测出的轮速,;为根据侧
^
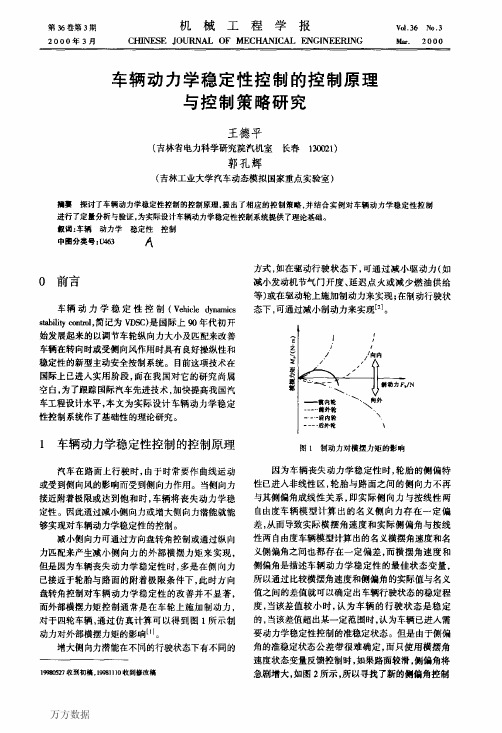
方式,如在驱动行驶状态下。可通过减小驱动力(如
O前言
车辆动力学稳定性控制(vehick dyIl—h
s诅bibty
减小发动机节气门开度、延迟点火或减少燃油供给 等)或在驱动轮上施加制动力来实现;在制动行驶状 态下,可通过减小制动力来实现[“。
o∞岣l,简记为vDsc)是国际上90年代初开
^uh /
1
蓄
、| 一j,jjf
j、弋启
非靛状盎 ‘l
fi
非t窟状毫
一1.O
究。在真实驾驶员操纵下,试验车辆以25 J.】/s的初
始速度在湿土路上作单移线行驶,施加Ⅵ)sc和不
加该控制的试验结果如图5所示。图5a为方向盘 \?:25
o。s
。”“25\
辨。\、’黼
j、
转角曲线,图5b为车辆行驶位移,图5c为发动机节 气门开度曲线,图5d为施加在各个车轮上的制动力 矩曲线。
d删.‰蛐幽0fvDsc
vdlide
dyn衄i艚dabihy
iIl叩m血ly dI曲曲l打i119 a【衄—l搽.Tlle
de蛐VDsc咖.
h州删mld tlle删哪l bI曲is
1畸_瞳凼:V d】曲】e D,n岫i曲吼幽丑畸GⅡl咖1
汽车操纵稳定性的研究与评价

汽车操纵稳定性的研究与评价随着汽车工业的不断发展,汽车性能得到了显著提升。
汽车操纵稳定性作为衡量汽车性能的重要指标之一,直接影响着驾驶者的操控感受和行车安全。
因此,对汽车操纵稳定性进行深入研究,提高其评价水平,对于提升汽车产品竞争力具有重要意义。
汽车操纵稳定性研究主要涉及车辆动力学、控制理论、机械系统等多个领域,其目的是在各种行驶条件下,保证汽车具有良好的操控性能和稳定性。
然而,目前汽车操纵稳定性研究仍存在一定的问题,如评价标准不统测试条件不完善等,制约了其发展。
汽车操纵稳定性对于保证驾驶安全具有重要意义。
在行驶过程中,车辆受到外部干扰或自身惯性力的影响,容易导致车身失稳,从而引发交通事故。
良好的汽车操纵稳定性通过有效抑制车身晃动、调整轮胎磨损,为驾驶者提供稳定的操控感,降低交通事故风险。
影响汽车操纵稳定性的因素主要包括以下几个方面:(1)车辆动力学性能:车辆的加速、减速、转弯等动力学性能直接影响驾驶者的操控感受和行车安全。
(2)轮胎性能:轮胎的抓地力、摩擦系数等性能对车辆的操控性和稳定性具有重要影响。
(3)悬挂系统:悬挂系统的设计直接影响车辆的侧倾、振动等特性,从而影响操纵稳定性。
(4)驾驶者的操控技巧:驾驶者的预判、反应速度、操控技巧等直接影响车辆的操纵稳定性。
为提高汽车操纵稳定性,需要采取相应的控制策略。
其中,最重要的是采取主动控制策略,包括:(1)防抱死制动系统(ABS):通过调节制动压力,防止轮胎抱死,提高制动过程中的稳定性。
(2)电子稳定系统(ESP):通过传感器实时监测车辆状态,对过度转向或不足转向进行纠正,保证车辆稳定行驶。
(3)四轮驱动(4WD):通过将驱动力分配到四个轮胎上,提高车辆的加速性能和操控稳定性。
汽车操纵稳定性的评价主要从以下几个方面进行:(1)侧向稳定性:评价车辆在侧向受力情况下的稳定性。
(2)纵向稳定性:评价车辆在纵向受力情况下的稳定性。
(3)横向稳定性:评价车辆在横向受力情况下的稳定性。
《2024年基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究》范文

《基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究》篇一一、引言随着科技的飞速发展,无人驾驶车辆已成为现代交通领域的重要研究方向。
无人驾驶车辆的核心技术之一是轨迹跟踪控制算法,其性能直接影响到车辆的行驶安全和稳定性。
模型预测控制(MPC)作为一种先进的控制策略,在无人驾驶车辆的轨迹跟踪控制中具有广泛的应用前景。
本文旨在研究基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法,以提高无人驾驶车辆的行驶性能和安全性。
二、模型预测控制概述模型预测控制(MPC)是一种基于模型的优化控制策略,通过建立车辆动力学模型和预测模型,实现对未来时刻车辆状态的预测和优化。
MPC具有多约束处理能力、对模型不确定性的鲁棒性以及能处理多目标优化问题的特点,使得其在无人驾驶车辆的轨迹跟踪控制中具有显著优势。
三、无人驾驶车辆轨迹跟踪控制算法研究1. 车辆动力学模型建立为了实现精确的轨迹跟踪控制,首先需要建立准确的车辆动力学模型。
本文采用非线性车辆动力学模型,考虑车辆的纵向、横向以及横摆运动,为后续的轨迹跟踪控制提供基础。
2. 预测模型的构建预测模型是MPC的核心部分,通过对未来时刻车辆状态的预测,实现对轨迹的跟踪控制。
本文采用基于滚动时域的预测方法,通过优化目标函数,实现对未来时刻车辆状态的预测和优化。
3. 控制器设计基于建立的车辆动力学模型和预测模型,设计控制器实现轨迹跟踪控制。
控制器采用MPC算法,通过优化目标函数,实现对未来时刻车辆状态的优化和控制。
同时,考虑到实际道路交通环境的复杂性,本文还引入了约束条件,如速度、加速度等限制,以保证车辆行驶的安全性和稳定性。
四、算法仿真与实验验证为了验证基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法的有效性,本文进行了仿真实验和实际道路测试。
仿真实验结果表明,该算法能够实现对期望轨迹的准确跟踪,具有较好的鲁棒性和稳定性。
实际道路测试结果也表明,该算法能够适应不同道路条件和交通环境,实现安全、稳定的行驶。
基于TruckSim的重型清障车操纵稳定性分析
基于TruckSim的重型清障车操纵稳定性分析董志圣;田国富;王涛;刘宏利【摘要】国内清障车主要使用的是载货汽车的二类汽车底盘,这种底盘在整车的结构布置和承力方式上有许多不满足清障车专用作业装置的布置需求.本文以重型清障车的操纵稳定性为研究目标,基于TruckSim软件建立某款重型清障车工程样车的整车模型,参照《GB/T 6323-2014汽车操纵稳定性试验方法》对汽车进行稳定性仿真试验,选取不同质心高度和质心纵向位移进行开环评价和闭环评价对比分析.结果表明在原设计参数的基础上降低车辆的质心高度和前移质心纵向位移,对车辆的操纵稳定性具有一定的提高.【期刊名称】《交通节能与环保》【年(卷),期】2019(015)002【总页数】5页(P21-25)【关键词】重型清障车操纵稳定性TruckSim仿真质心位置【作者】董志圣;田国富;王涛;刘宏利【作者单位】沈阳工业大学,辽宁沈阳 110870;交通运输部公路科学研究院,北京100088;沈阳工业大学,辽宁沈阳 110870;沈阳工业大学,辽宁沈阳 110870;交通运输部公路科学研究院,北京 100088【正文语种】中文【中图分类】U469.60 引言清障车是用于清理交通事故引起的故障车辆、保障道路快速通畅的汽车。
清障车通常由专用底盘、专用作业装置、作业附件组成。
清障车作为专项作业车,不仅要保障清障作业过程中的安全,也要保障自身的行驶安全。
目前我国清障车所选的底盘并非真正意义上的专用底盘,主要是采用载货汽车的二类汽车底盘,这种底盘在整车的结构布置和承力方式上有许多不满足清障车专用作业装置的布置需求[1]。
在加装作业装置后,质心发生变化导致整车的操纵稳定性发生变化,同时使得车辆行驶和作业的安全性受到影响。
针对这一问题,本文以某一款31吨的重型清障车为研究参照对象,通过TruckSim仿真软件建立整车动力学模型,参照国家标准《GB/T 6323-2014汽车操纵稳定性试验方法》对汽车进行稳定性仿真试验,从开环评价及闭环评价的角度,通过仿真车辆的工作状态,并对清障车稳定性影响较大的参数进行对比,为重型清障车上装的安装提供参考。
基于Trucksim整车操纵稳定性仿真分析研究

图 1 T r u c k s i m 工 作 界 面 和 组 成
1 . 1 车辆模 型的建 立
立模 型 的可信 度 , 而且 在产 品开 发过 程 中减少 大量
的物 理样 机测 试 , 缩 短 了开 发周 期 , 大 大 降低 了开
发成 本 。
T r u c k s i m软 件 中车 辆 模 型 由车 体 、 轮胎 、 动 力 总成 、 悬架 系统 、 转 向系统 、 制动 系统 以及 空气 动力
D O I : 1 0 . 3 9 6 9 / j . i s s n . 2 0 9 5— 5 0 9 X . 2 0 1 7 . 0 2 . 0 0 6
基于 T r u c k s i m 整 车 操 纵 稳 定 性 仿 真 分 析 研 究
章 雪华 , 石柏 军 , 李 岩
( 华 南理 工大 学机 械 与汽车 工程 学 院 , 广东 广州 5 1 0 6 4 0 )
收 稿 日期 : 2 0 1 7一 O l一 0 5
1 ) 车体 : 以某款改装专用 车为例, 其 整 车 长/ 宽/ 高为 7 5 3 0 m m / 2 4 6 0 m m / 2 8 4 0 m m, 质 心 高 度 l 1 7 5 m m, 质心距前轴距离 1 1 0 0 m m, 轴距 4 2 om m, 簧
毕业设计(论文)-基于CARSIM的汽车操纵性研究
机械工程学院毕业设计题目:基于CARSIM的汽车操纵性研究专业:车辆工程班级:12卓越姓名:学号:指导教师:日期:2016.05.20目录摘要 (1)引言 (1)1意义及现状分析 (1)1.1意义 (1)1.2 CARSIM软件的现状分析 (2)2 CARSIM软件介绍 (2)2.1图形化数据库 (2)2.2数学模型求解器 (2)2.3仿真结果后处理 (3)3汽车操纵稳定性的评价 (3)3.1车辆操纵性性评价的基本概念 (3)3.2主观评价和客观评价 (4)3.2.1主观评价汽车操纵性 (4)3.2.2客观评价汽车操稳性 (4)4 CARSIM整车模型的建立及车辆模型系统介绍 (5)4.1车体(Sprung Mass from Whole Vehicle) (6)4.2轮胎(Tires) (7)4.3转向系统(Steering System) (8)4.3.1转向系统介绍: (9)4.3.2 CARSIM转向系模型 (9)4.4悬架系统(Suspension) (10)4.4.1独立悬架运动学特性(Independent Suspension kinematics) (10)4.4.2独立悬架弹性运动学特性(Independent Suspension Compliance) (11)4.5传动系(Power train) (12)4.6制动系(Brakes) (13)5 CARSIM操纵性仿真分析 (15)5.1 CARSIM速度仿真研究 (15)5.2 CARSIM簧载质量仿真研究 (18)5.3 CARSIM悬架刚度仿真研究 (20)5.4 CARSIM不同驱动方式仿真研究 (22)5.5 CARSIM不同轮胎结构仿真研究 (24)6总结 (25)致谢 (27)参考文献 (28)Abstract (29)基于CARSIM的汽车操纵性研究摘要:此论文讲述了汽车在不同速度、簧载质量、悬架刚度、阻尼系数等各种条件下汽车的操纵性状况,并以此分析影响汽车操纵性的各种因素,综合对比得出最佳操纵性参数,根据汽车在不同参数条件下的行驶特点,运用CARSIM仿真软件的汽车动力学模型,并进行建模分析,最后对汽车的操纵性进行曲线和动画仿真研究,比较各种参数下的曲线和动画优缺点,最终得出合理结论。
对汽车操纵稳定性的影响因素分析及对操稳性的研究评价
第!期
马涛锋等: 对汽车操纵稳定性的影响因素分析及对操稳性的研究评价
" #$% "
不足转向量有所增加。 前悬架中采用较硬的横向稳定杆有助于提 高汽车的不足转向性, 并能改善汽车的蛇行行驶性能。
#* 万公里,发现有高速摆头现象,踩下制动踏板后有左右打手 现象。检查轮辋不偏摆, 车轮动平衡也正常, 顶起前桥从检查孔 中发现制动鼓失圆, 更换制动鼓和制动蹄片后, 故障消失。
! 气动力影响及操稳性评价的研究过程
汽车在低速行驶时,往往只须考虑所受的地面阻力,而所 受的气动力常常可忽略。但在高速行驶时,气动力对操纵稳定 性的影响变得极为重要,特别是侧向气动力的影响。空气的侧 向推力与空气的横摆力矩作用于高速行驶的汽车车身上,使汽 车各轮的负荷、轮胎的侧偏特性和车身的侧偏角都发生了变 化, 从而对汽车的操纵稳定性产生不可忽视的影响。 操稳性评价的研究过程: -. 年代以前基本上都是用开环评 价方法;/. 年代初期,人们用系统工程学方法探索操纵性的评 价方法: 利用驾驶员对汽车直线行驶性能、 转 /. 年代中期以后, 弯行驶性能和转向轻便性等特性的感觉,进行主观评价:主观 评价不仅要考虑汽车本身的特性,还要考虑人的行为特性、对 从理论和实验两个方面着手, 重新 道路跟踪的要求。 0. 年代初, 开始深入地研究驾驶员一车辆—道路闭环系统;1. 年代以来, 郭孔辉教授提出了各个单项总方差评价指标及闭环系统主动 安全性的综合评价与优化设计方法。
! 行驶系的影响
后悬架结构参数及横向稳定杆的 !V ! 前轮定位参数、 影响
前轮定位参数包括: 前轮外倾角、 主销后倾角、 主销内倾角 和前轮前束。 前轮外倾角指前轮中心线与地面垂直线所成的夹角。前轮 它的作用主要是当汽车行驶时, 将轮毂 外倾角一般在 !W X (V )W。 压向内轴承, 而减轻外端较小的轴承载荷, 同时, 可以防止因前 轴变形和主销孔与主销间隙过大引起前轮内倾,减轻轮胎着地 与主销轴线与地面交点间的距离, 从而使转向轻便。 主销后倾角是指主销轴线与前轮中心的垂线之间形成的 夹角。主销后倾角对汽车操纵稳定性的影响主要通过“后倾拖 距 ”使地面侧向力对轮胎产生一个回正力矩,该力矩产生一个 与轮胎侧偏角相似的附加转向角,它与侧向力成正比,使汽车 趋于增加不足转向,有利于改善汽车的稳态转向特性。若主销 后倾角减小,使得回正力矩变小,当地面对转向轮的干扰力矩 大于转向轮的回正力矩时, 就会产生摆振。 主销内倾角是指主销轴线与地面垂线之间形成的夹角。主 销内倾角对操纵稳定性的影响,主要也是回正力矩,它是在前 轮转动时将车身抬高,由于系统位能的提高而产生的前轮回正 力矩, 它与侧向力无关。因此可以说, 主销内倾角主要在低速时
基于近似模型的车辆平顺性优化研究
Op t i mi z a t i o n a n d Re s e a r c h o f Ve h i c l e Ri d e Co mf o r t Ba s e d o n Ap p r o x i ma t e Mo d e l
摘 要: 利用 多体动力学软件 A D A MS / C a r 建 立 了 某 轿 车 的整 车 刚柔 耦 合 模 型 , 以 悬 架 弹 簧 刚度 、 减 震 器 阻 尼 为 设
计 变量 , 驾 驶 员座 椅 椅 面 总 加 权 加 速 度 均 方 根 值 为 优 化 目标 , 在I s i g h t 软件中 , 应用 现代 D O E采 样 技 术 与 响应 面
o b j e c t i v e . A p p l y i n g m o d e r l l D O E s a mp l i n g t e c h n i q u e a n d r e s p o n s e s u f r a c e me t h o d , t h e a p p r o x i ma t e m o d e l b e t w e e n d e s i g n v a i r a b l e s a n d o p t i mi z a t i o n o b j e c t i v e w a s b u i l t i n I s i g h t .B a s e d o n t h i s
Li u Yu ,Li u Pi n g ,Ra o Ya n g
一种面向整车性能分解技术的多目标系统优化设计方法
Xi e g,W a g Li e Ch n n ,Re i n Ka
( a i tmoieT c nc l ne o, t) P nAsaAuo t eh ia trC .Ld v Ce
【 bta tA uo td s uai n u ss m ef mac pi zt n rcd r fr vhc h nl g A s c] n a t e i l o a d sbyt pr r ne ot ao poeue o eil a di r ma m tn e o mi i e n
m m mlm
o/ ) m
前 、 轮 轮 跳 外 倾 变化 特 性 后
前 、 轮轮 跳 轮 距 变 化 特性 后
前 、 轮轮 跳 前 束 变 化 特 性 后
mrm i m d
() 。/ m
前 、 轮 纵 向力 转 向特 性 后 前 、 轮 侧 向力 转 向 特性 后 前 、 轮 回正力 矩 转 向特 性 后 前 、 轮 侧 向力 外 倾 角 变化 特 性 后
从6 5个 参 数 中筛 选 出贡献 率 大 于 2 %的 2 1个显 著 因子 作 为 响 应 面分 析 和 系统 优 化 设 计 的控 制 变 量
类 别 控 制变 量 量 纲
车 轮轮 心垂 直 运 动 行 程/ m r a
图 4 轮 跳 下 主销 后 倾 角 变 化 率 的带 宽范 围选 择
4 优 化 计 算 的统 计 学 分 析 结 果
41 DOE 分 析 结 果 .
前 轮 车轮 前 束 角 前 轮 车轮 外 倾 角 车 轮 定 位
前 轮轮 跳 行 程/ mm
图 3 外 倾 角 随 轮 跳变 化 的 K特 性
对汽车操纵稳定性的影响因素分析及对操稳性的研究评价
#& % 前轴或车架变形导致汽车操纵失稳
由于车架是汽车的基础,它的变形会直接影响各部件的连 接及配合, 从而直接影响操纵稳定性。如果汽车前轴变形, 就会 改变主销孔的轴线位置, 使主销内倾角变大, 则外倾角变小, 反 之, 内倾角变小, 外倾角变大, 从而行驶时会产生转向沉重, 磨 胎和无自动回正的能力。
万方数据 # 来稿日期: (""+ # "% # (%
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++,
前悬架导向机构的几何参数决定前轮定位参数的变化趋 势和变化率。在车轮跳动时,外倾角的变化包括由车身侧倾产 生的车轮外倾变化和车轮相对车身的跳动而引起的外倾变化 两部分。在双横臂独立悬架中,前一种变化使车轮向车身侧倾 的方向倾斜, 即外倾角增大, 结果使轮胎侧偏刚度变小, 因而使 整车不足转向效果加大;后一种变化取决于悬架上、下臂运动 的几何关系,在双横臂结构中,往往是外倾角随弹簧压缩行程 的增大而减小,这种变化与车身侧倾引起的外倾角变化相反, 会产生过度转向趋势。 后悬架结构参数对汽车操纵稳定性的影响, 近似于前悬架的 “干涉转向” 。它是在汽车转向时,由于车身侧倾导致独立悬架的 左右车轮相对车身的距离发生变化,外侧车轮上跳,与车身的距 离缩短,内侧车轮下拉,与车身的距离加大。悬架的结构参数不 同, 车轮上下跳动时, 车轮前束角的变化规律也必然会不同。 前轮前束指汽车转向的前端向内收使两前轮的前端距离 小于后端距离。两车轮前后的距离之差, 称为前束值, 一般不大 于 Y X !(OO。其作用是消除由于前轮外倾使车轮滚动时向外分 开, 引起车轮滚动时边滚边拖的现象, 引导前轮沿直线行驶。 主销内倾角与后倾角由结构上保证, 在调整时难以改变。调 整时主要调整前轮外倾及前轮前束。前轮外倾随负荷的变化而变 化。当车辆转向时, 在离心力作用下, 车身向外倾斜, 外轮悬架处 于压缩状态, 车轮外倾角逐渐减小 ’ 向负外倾变化 * ; 内轮悬架处 于伸张状态,使得本来对道路向负外倾变化的外倾角减弱。从而 提高车轮承受侧向力的能力, 使汽车转向时稳定性大为提高。前 轮前束不可过大,若前束过大,会使车轮外倾角、主销后倾角变 小, 会使前轮出现摆头现象, 行驶中有蛇行, 转向操作不稳。 横向稳定杆常用来提高悬架的侧倾角刚度,或是调整前、后 悬架侧倾角刚度的比值。在汽车转弯时,它可以防止车身产生很 大的横向侧倾和横向角振动,以保证汽车具有良好的行驶稳定 性。提高横向稳定杆的刚度后, 前悬架的侧倾角刚度增加, 转向时 左右轮荷变化加大,前轴的每个车轮的平均侧偏刚度减小,汽车
主动悬架与主动横向稳定杆的集成控制
主动悬架与主动横向稳定杆的集成控制周兵;吕绪宁;范璐;张文超【摘要】A dynamics model of a full vehicle w hich equipped the active suspension system and ac-tive roll stabilizer was set up to improve ride performance and handling stability of the vehicle .Also active suspension and active roll stabilizer controllers were designed based on the coupling relationship between the two systems .The PID integrated control strategy was designed based on PID control and linear control .The vehicle in the steering working situation was simulated with MATLAB/Simulink . The simulation results show the effectiveness of proposed integrated control strategy to improve han-dling stability and ride comfort .%为改善汽车的平顺性和操纵稳定性,建立了包含主动悬架与主动横向稳定杆的整车动力学模型,并根据主动悬架与主动横向稳定杆两个系统间的耦合关系,分别设计了主动悬架与主动横向稳定杆的子控制器,将PID与线性控制相结合,设计了PID集成控制策略。
在MATLAB/Simulink中对汽车的转向工况进行了仿真。
汽车的操纵稳定性和平顺性教案

总结词:不良车型在操纵稳定性和平 顺性方面存在明显不足,驾驶和乘坐 体验较差。
操纵稳定性:不良车型通常存在转向 反馈模糊、行驶轨迹不稳定的问题。 车轮定位参数不合理或悬挂系统调校 不当可能导致操控性能不佳,使驾驶 员难以控制车辆的行驶轨迹。在高速 行驶或紧急变道时,不良车型可能表 现出较大的侧倾或摆动,降低驾驶安 全性。
07
总结与展望
本课程总结
01
02
03
04
掌握汽车操纵稳定性和平顺性 的基本概念和评价指标。
学习了影响汽车操纵稳定性和 平顺性的主要因素,包括轮胎 、悬挂系统、转向系统等。
理解了如何通过设计优化和调 整来提高汽车的操纵稳定性和
平顺性。
实践了汽车操纵稳定性和平顺 性的测试和评价方法。
对未来研究的展望
路面状况
不同路面状况对车辆的平顺性产 生直接影响,如颠簸的路面会导
致车辆振动加剧。
悬挂系统设计
悬挂系统是影响平顺性的关键因素, 设计合理的悬挂系统可以有效吸收 路面振动,提高平顺性。
座椅舒适度
座椅的舒适度直接影响乘坐人员的 感受,高品质的座椅能够提供更好 的减震效果。数, 提高悬挂系统对路面振动的吸收
平顺性:不良车型可能采用较为粗糙 的减震技术,导致在颠簸路面上行驶 时出现明显的震动和冲击。座椅设计 缺乏人体工程学考虑,长时间乘坐容 易引发疲劳。此外,发动机、传动系 统和底盘之间的匹配不佳可能导致动 力输出不顺畅,进一步影响行驶的平 顺性。整体而言,不良车型在操纵稳 定性和平顺性方面的不足会严重影响 驾驶和乘坐的舒适度及安全性。
驾驶员操作
驾驶员的驾驶技术、对车 辆性能的了解程度以及驾 驶心态等都会影响操纵稳 定性。
道路条件
道路的曲率、路面状况、 能见度等因素也会影响汽 车的操纵稳定性。
某重型越野车平顺性和操纵稳定性协同优化
某重型越野车平顺性和操纵稳定性协同优化郑睿;祝安定【摘要】为改善某重型越野车的平顺性和操纵稳定性,在多体动力学仿真软件ADAMS/Car中建立整车模型,选取3个操纵稳定性评价指标和1个平顺性评价指标作为优化目标,以悬架减振器阻尼和板簧刚度为设计变量,建立协同优化模型.使用响应面法拟合出回归模型,赋予各个优化目标适当的权数,用NSGA-Ⅱ优化算法对悬架参数进行优化.优化结果表明,车辆平顺性和操纵稳定性得到较为明显的改善.【期刊名称】《农业装备与车辆工程》【年(卷),期】2018(056)012【总页数】4页(P52-55)【关键词】悬架;平顺性;操纵稳定性;响应面法;NSGA-Ⅱ优化算法【作者】郑睿;祝安定【作者单位】230009 安徽省合肥市合肥工业大学;230009 安徽省合肥市合肥工业大学【正文语种】中文【中图分类】U461.40 引言近年来,随着经济的飞速发展和科技的进步,车辆的平顺性和操纵稳定性受到的关注越来越高。
国内外对车辆行驶平顺性和操纵稳定性方面进行了大量研究[1-7]。
然而,对于重型越野车,大多数研究都停留在只考虑整车的操纵稳定性或平顺性单目标的匹配及优化,很少有兼顾操纵稳定性和平顺性的多目标优化。
单纯优化某一性能会使其他性能发生改变,影响车辆的整体性能,因此,必须对平顺性和操纵稳定性的各个指标进行平衡及协同优化,使得整车的性能参数达到更优。
1 整车模型的建立多体动力学是进行车辆操纵稳定性和平顺性仿真分析最有效的方法之一。
本文利用多体动力学软件ADAMS的Car模块分别建立了前桥悬架、中桥悬架、后桥平衡轴悬架、转向系、动力总成、板簧和轮胎等子系统,对应的几何参数、质量和力学参数分别从CATIA三维模型和实验获得。
其中,板簧和减振器的力学特性由厂商提供,限位块的刚度特性由试验测得。
将上述子系统组装起来得到整车多体动力学模型(图1)。
建模过程中不考虑车辆内部各零部件之间的摩擦,除板簧和轮胎以外的其他零部件皆视为刚性体。
基于刚弹合成模型的重型汽车平顺性灵敏度分析
基于刚弹合成模型的重型汽车平顺性灵敏度分析李杰;高雄;王文竹;张振伟【摘要】针对车体弹性和车辆参数对重型汽车平顺性影响问题,给出了两端自由等截面梁刚弹合成理论,建立了重型汽车刚弹合成模型及其平顺性频域分析方法,基于与多学科优化设计软件Isight联合仿真的方案,采用最优拉丁超立方试验设计对重型汽车平顺性进行了灵敏度分析.研究表明:影响重型汽车平顺性的主要因素为路面等级、车速、悬架刚度和阻尼、轮胎刚度和车体刚度,其中车体刚度主要影响车体上各点的垂直加速度,结果为重型汽车行驶平顺性的性能改善和优化奠定基础.【期刊名称】《振动与冲击》【年(卷),期】2018(037)013【总页数】7页(P85-91)【关键词】重型汽车;平顺性;刚弹合成;灵敏度;Isight;最优拉丁超立方设计【作者】李杰;高雄;王文竹;张振伟【作者单位】吉林大学汽车仿真与控制国家重点实验室,长春130025;吉林大学汽车仿真与控制国家重点实验室,长春130025;吉林大学汽车仿真与控制国家重点实验室,长春130025;吉林大学汽车仿真与控制国家重点实验室,长春130025【正文语种】中文【中图分类】O326;U461.4重型汽车平顺性不仅影响乘员的舒适程度、身体健康和货物的完好性,也对重型汽车的其他性能[1-2],如动力性、经济性和操纵稳定性等有着重要影响。
因此,对重型汽车平顺性进行理论研究具有重要的意义。
重型汽车车体长、轴距大、承载质量大,车体的弹性弯曲振动表现十分明显[3-4],成为影响重型汽车平顺性的一个重要因素。
因此,分析重型汽车平顺性,有必要考虑车体弹性。
重型汽车平顺性与很多因素有关,包括运行参数和结构参数。
对重型汽车平顺性进行灵敏度分析,是分析这些参数对重型汽车平顺性指标影响的敏感程度,找出影响重型汽车平顺性的主要因素,可以为重型汽车平顺性改进和优化设计提供有效基础。
针对重型汽车车体弹性问题,国内外学者将车体视为两端自由等截面梁的弹性弯曲振动,再与车体刚体振动合成建立刚弹合成模型。
一款电动车的底盘设计研究及操纵稳定性分析
一款电动车的底盘设计研究及操纵稳定性分析发布时间:2021-04-22T10:54:47.113Z 来源:《建筑实践》2020年12月34期作者:[导读] 新型微型电动车底盘包含了制动系统、转向系统、悬架系统、车架、摘要:新型微型电动车底盘包含了制动系统、转向系统、悬架系统、车架、传动系统、制动系统在内的诸多复杂结构。
本文根据新动力、新能源系统技术要求,对新型微型电动车底盘对制动系统、行驶系统等结构设计中应用工程设计软件建立微型新型电动车车架模型、悬架导向系统、制动系统等的方法以及进行有限元结构分析的方法加以论证,期望能够通过本文的论述证明底盘设计模型软件等运用能够确保微型新型电动车拥有更好的操纵稳定性。
关键词:新型电动车;底盘设计;操纵稳定性当前采用底盘系统设计和操纵稳定性仿真进行分析,计算悬架、制动、传动、制动等系统的相关主要参数,并根据参数总成为系统模型,完善车架设计、零部件设计工作,应用多种工况下的静力学分析对底盘各关键零部件的结构强度进行论证,实现汽车操纵稳定性。
通过仿真分析结果对汽车是否具有良好动力性、操纵稳定性和制动性进行论证,在当前汽车制造企业中运用较为广泛。
随着能源危机和环境污染问题的加剧,汽车制造也要响应节能和环保要求。
各国都非常重视对汽车性能的提升,都在想方设法通过高科技应对新兴工业的发展。
1电动车底盘结构设计规范和基本要求 1.1连接方式和质量要求第一,电焊连接。
采用什么焊接方式主要看两个工件焊接区域壁厚值得大小,壁厚按照小值壁厚选用的原则来选择。
第二,螺纹连接。
在进行螺纹连接操作的时候要严格遵照国家产品设计标准进行,对于有特殊要求及重点部位要严格按照操作流程操作。
1.2车架组装工艺规范和质量要求第一,槽型纵梁车的组装和质量要求。
对组装槽形纵梁的车架应用专业的模具进行检查,通过有效检查来确保平台的牢固、平整。
在槽形纵梁车组装的时候需要严格按照相关施工设计图纸检查车架的零部件,使得各类支架的设计符合图纸设计要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
万方数据
数据采集{‘》试验设计采集数据
净警模型类型l◇响应面模型
裂2
℃篓别。
黼
图l近似模型方法的流程
3整车多体动力学模型及评价目标
l,
3.1整车模型的建立
多体动力学已被证明是用于车辆操纵稳定性和行驶平顺性仿真分析的有效方法【3-41。
本文利用多体动力学软件ADAMS/CaY分别建立前悬架、后悬架、转向系、动力总成和轮胎等子系统模型。
质量和转动惯量参数则从CATIA三维数模计算或试验得到,从而建立了某轿车整车多体动力学模型(图2)。
该轿车前悬架为麦弗逊式。
后悬架为麦弗逊烛式。
前、后悬架均带横向稳定杆。
前、后轮胎型号均为195/60R15,整车技术条件见表1所列。
图2整车多体动力学模型
表1整车技术条件
参数数值
前轴荷/kg966.8
后轴荷/kg751.6
轴距/nun2720
前轮距/mml545
后轮距/ram1535
转向传动比/mm・(o)一t47,360
一20一
建模过程中有如下假设:
a.对于理想铰链,除转动铰、滑动铰外,皆忽略内部摩擦及阻尼:
b.整车零部件中,除弹簧、橡胶件、扭杆弹簧、轮胎等弹性元件外.其余均按刚体考虑。
3.2评价指标的确定
3.2.1操纵稳定性评价指标
操纵稳定性有很多种评价方法,一般可分为开环和闭环两种【5l。
开环评价方法有稳态转向(固定圆周转向和固定转向盘转角转向)试验和瞬态转向(J形转弯和鱼钩转弯等)试验。
闭环试验考虑驾驶员的反馈,模拟真实的操纵试验,如ISO3888双移线测试方法。
本次研究中采用典型的90km/h下的双移线(ISO3888)方法来评价汽车的操纵稳定性能。
主要指标如下161:
瞬态不足转向增益(TransientUndersteerGain):它是指在汽车瞬态操纵过程中的转向盘转角变化与车辆横摆角速度的比值,用%来表示。
通常情况下,它影响正常驾驶时转向盘所需的转动量,还用来评价转向输入与车辆响应之间延迟的情况。
瞬态侧倾增益(TransientRollGain):它是指在汽车瞬态操纵过程中的侧倾角的变化量与车辆侧向速度的比值,用Rk来表示。
通常情况下,它影响正常驾驶时驾驶员感知到车身侧倾角的大小以及对车身侧倾衰减的评价。
侧向加速度一转向盘转角时间延迟(Lateral
acceleration—SteeringwheelangletimeDelay):它是指在汽车瞬态操纵过程中车辆侧向加速度与转向盘转角之间的时间延迟,用下鲫表示。
它通常根据ISO3888双移线测试方法.由在固定车速90km/h下测得上述两个信号的时滞互相关函数(图3)来确定。
它也影响驾驶员转向输入与车辆响应之间延迟的判断。
图3互相关函数的时问延迟
侧向加速度一横摆角速度时间延迟(Lateralacceleration—YawratetimeDelay),用丁Ⅳ来表示。
它是指在汽车瞬态操纵过程中车辆侧向加速度与横
汽车技术万方数据
摆角速度之间的时间延迟:它通常也根据ISO
3888
双移线测试方法,由在固定车速90km/h下测得上述两个信号的时滞互相关函数来确定(图3)。
它影响驾驶员转向输入与车辆响应之间延迟的判断。
3.2.2行驶平顺性评价指标
根据文献f7】中汽车平顺性的随机输入行驶试验方法,运用所建立的不平路面(比利时路面)进行整车的平顺性虚拟仿真分析。
按照舒适性评价标准
IS0263l—l:1997(E)中规定的方法,取一定车速(60
km/h)进行仿真分析,计算前座椅地板的加速度均方根值,用于评价汽车行驶的平顺性。
加速度均方根值定义如下:
‰=饵两
(12)
式中,丁为采样时间;‰为加权加速度值;t为时间。
4优化计算的实现
4.1设计变量
以前悬架与后悬架的弹簧刚度、减振器阻尼特性和横向稳定杆刚度为设计变量(假设弹簧和减振器左右是对称的)。
为了便于仿真计算,将弹簧刚度和减振器特性(图4)分别乘以一个比例系数来改变其大小。
设前、后弹簧刚度比例系数分别为墨和墨;前、后减振器阻尼比例系数分别为cf和Q前、后横向稳定杆刚度分别为乃和瓦。
+初始值-o,/
一0.5倍初始值盔多.
十2倍初始值
Z岜
采
己。
零≥罗酽1)0.5
1.0
1.5
2.
一
一2
速度,m・8-l
■
图4减振器特性曲线变化不例
4.2
目标函数及约束条件
综合多款竞标车型的目标数据16--81,对于操纵稳
定性应在保证一定的不足转向增益的条件下尽量减小侧倾增益与时间延迟。
而与行驶平顺性相关的垂直加速度则要尽量减小。
由此确定的目标函数见表2所列。
联合多学科优化系统平台iSightFD与多体动力学软件ADAMS进行仿真.利用试验设计的结果数据,一共采集了80个样本点。
基于响应面模型得到该轿车近似模型,并利用iSightFD中近似模型的可视化工具对近似模型进行误差分析和可信度验
2009年第7期
证.得到了精确度较高的近似模型(误差低于0.2,可信度达到0.9)。
部分响应面模型如图5所示。
表2目标函数及约束条件
目标函数
下限
上限
%,(。
)-旷1
0.280.36
Rk,(。
)・g-1
7.5
f。
fE
O.16
tm|s
0.11
a
R鹏,g
图5近似模型的部分响应面模型
5优化结果
利用上述近似优化数学模型对该轿车进行基于操纵稳定性和行驶平顺性的多目标优化计算。
计算中采用NSGA—II(Non—Dominated
SortingGeneticAl—
gorithm)优化算法。
设群体规模为10、遗传代数为20、交叉概率为0.9。
经过201次迭代计算,目标函数随迭代次数的变化趋势如图6所示。
由图6中可以看出.汽车的操纵稳定性和行驶平顺性的各项指标同时得到了有效提高和较好的平衡。
优化后的设计变量值和目标函数值的对比见表3所列。
将优化后的设计变量值代人多体动力学模型进行了实际精确值计算。
计算结果与基于多体动力学模型最优点精
一2l一
万方数据
万方数据。