ModbusTcp从站设置
MODBUSTCP从站模拟程序

sendbuf[5] = uLength*2+3; //出去头部域后的长度
sendbuf[8] = uLength*2;//数据字节长度
for(i=0;i<uLength;i++)//寄存器数据填充
{
sendbuf[i*2+9] = MyReg[uStart+i]>>8;
int error = WSAGetLastError();
printf("Accept() failed. Win32 error is 0x%lx\n", GetLastError());
goto Cleanup;
} else {
printf("Connected from %d.%d.%d.%d:%d\n", //答应远程计算机的IP和端口号
// Bind the listen socket to any local IP address.
localIp.sin_family = AF_INET;
localIp.sin_port = htons(nPort);
localIp.sin_addr.S_un.S_addr = INADDR_ANY;
继续访问 取消访问/diary,8677548.shtml
一直以来都在用MODBUS-RTU,也用单片机实现过MODBUS-RTU从站,感觉挺好用的,只是串行速度最高只能到115.2K,而且远距离通讯的时候,不得不考虑转成485或者光纤的方式,比较麻烦而且钱也花的不少.
[原创]MODBUS/TCP从站模拟程序(Windows XP+win socks) heroxx,2008-04-18 09:07:21
昆仑通态ModbusTcp通讯总结
昆仑通态ModbusTcp通讯总结
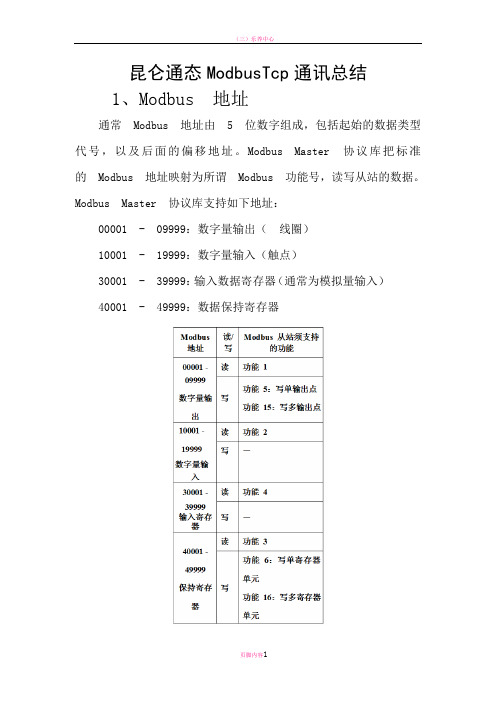
1、Modbus 地址
通常Modbus 地址由 5 位数字组成,包括起始的数据类型代号,以及后面的偏移地址。
Modbus Master 协议库把标准的Modbus 地址映射为所谓Modbus 功能号,读写从站的数据。
Modbus Master 协议库支持如下地址:
00001 - 09999:数字量输出(线圈)
10001 - 19999:数字量输入(触点)
30001 - 39999:输入数据寄存器(通常为模拟量输入)
40001 - 49999:数据保持寄存器
2、主站和从站配置
上图:主站(客户机),这里为触屏电脑(TPC1062K),读取从站(WNC采集器或者测试过程中使用的PC机),设置本地IP地址为:192.168.0.2,端口号为3000。
从站(服务器),产生变化数据的源端,这里是利用PC机来模拟(WNC采集器)。
上图中读写4区通道D40001和D40002是按双字节操作读取第1和第2通道(Modbus中是以双字节为一个通道单元,WUB代表Word unsigned binary)。
上图中读写4区通道D40003和D40005是按四字节操作读取第3和第5通道(Modbus中是以双字节为一个通道单元,第3通道实际包括了第3和第4通道;第5通道实际包含了第5和第6通道,DF 代表double word float)。
3、ModbusTcp主从站通讯测试视频
测试视频进入网页中下载:TPC1062K的ModbusTcp测试视频.mp4。
S7-1500-Modbus TCP的通讯总结
S7-1500-Modbus TCP的通讯总结本文档总结了S7-1500 PLC和Modbus TCP之间的通讯方式及相关特点。
1. Modbus TCP简介Modbus TCP是一种常用的工业通讯协议,它基于TCP/IP协议栈,用于在工业自动化系统中实现不同设备之间的通讯和数据交换。
2. S7-1500与Modbus TCP通讯S7-1500是西门子公司的一种先进的可编程逻辑控制器(PLC)。
它支持Modbus TCP协议,可以作为主站或从站与其他Modbus TCP设备进行通讯。
以下是S7-1500与Modbus TCP通讯的关键步骤:2.1 设定Modbus TCP参数在S7-1500中设置Modbus TCP参数,包括通讯端口、从站地址等。
确保从站地址与相应的Modbus设备配置一致。
2.2 建立连接使用S7-1500的通讯模块建立与Modbus TCP设备的TCP连接。
确保网络通畅,并且输入正确的目标设备IP地址。
2.3 发送请求根据通讯需求,S7-1500通过发送Modbus TCP请求来读取或写入数据。
请求包括功能码、数据起始地址和数据长度等。
2.4 等待响应S7-1500等待Modbus TCP设备的响应。
通常,Modbus设备会回复带有所需数据的响应包。
2.5 处理响应S7-1500解析Modbus设备的响应,提取所需数据,并进行相应的处理。
根据通讯规范,保证数据的可靠性和正确性。
2.6 关闭连接通讯结束后,S7-1500可以关闭与Modbus TCP设备的连接,释放资源。
3. S7-1500与Modbus TCP通讯的特点S7-1500与Modbus TCP通讯具有以下特点:- 可靠性:通过TCP/IP协议提供可靠的通讯连接和数据传输。
- 灵活性:S7-1500作为主站或从站灵活配置,适应不同的通讯拓扑。
- 高效性:Modbus TCP是一种轻量级协议,通讯效率较高。
结论S7-1500与Modbus TCP通讯是一种可靠、灵活和高效的方式,适用于工业自动化系统中的设备通讯和数据交换。
Modbus TCP IP

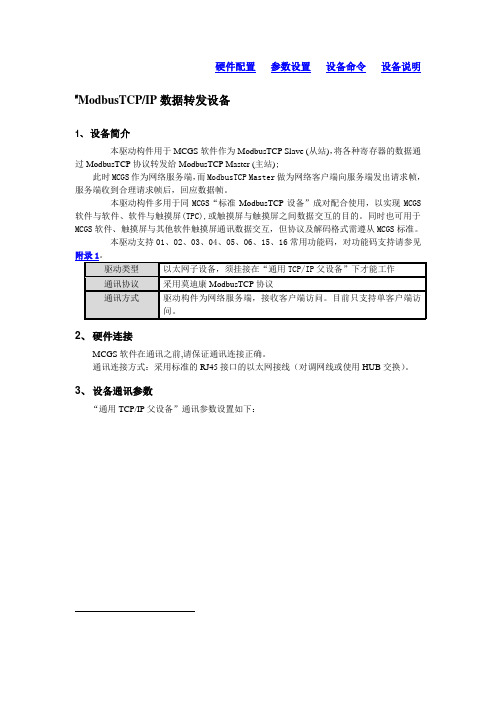
Modbus TCP IPmodbustcpip硬件配置参数设置设备命令设备描述#Modbustcp/IP数据转发设备1、设备简介该驱动组件作为Modbus cpslave(从站)用于MCGS软件,以传输各种寄存器的数据过modbustcp协议转发给modbustcpmaster(主站);此时,MCGS充当网络服务器,Modbus cpmaster充当网络客户端,向服务器发送请求帧。
在接收到合理的请求帧后,服务器响应数据帧。
本驱动构件多用于同mcgs“标准modbustcp设备”成对配合使用,以实现mcgs软件与软件、软件与触摸屏(tpc),或触摸屏与触摸屏之间数据交互的目的。
同时也可用于mcgs 软件、触摸屏与其他软件触摸屏通讯数据交互,但协议及解码格式需遵从mcgs标准。
该驱动程序支持01、02、03、04、05、06、15和16个通用功能代码。
有关功能代码支持,请参阅附录1。
驱动类型通讯协议通讯方式以太网子设备,须挂接在“通用tcp/ip父设备”下才能工作采用莫迪康modbustcp协议驱动构件为网络服务端,接收客户端访问。
目前只支持单客户端访问。
2、硬件连接在MCGS软件通信之前,请确保通信连接正确。
通讯连接方式:采用标准的rj45接口的以太网接线(对调网线或使用hub交换)。
3.设备通信参数“通用tcp/ip父设备”通讯参数设置如下:网络类型:网络通讯模式,请与设备设置一致。
默认值是UDP。
通常,标准Modbus TCP设备大多设置为“1-TCP”通信模式。
服务器/客户设置:请设置为“1c服务器”方式,即:做为服务器端,接受客户端访问。
本地IP地址:执行机器的本地IP地址。
请根据实际情况正确填写主机或TPC的本地IP地址。
本地端口号:执行机的网络操作端口,设置前要确保设置端口不被其他程序占用。
一般按默认值3000设置或设置为modbustcp标准的502端口。
远程IP地址:客户端(即modbustcp主机)的IP地址。
modbus通讯中,怎样给多个设备分配从站地址,怎样给多组数据分配地址

modbus通讯中,怎样给多个设备分配从站地址,怎样给多组数据分配地址
modbus通讯中,怎样给多个设备分配从站地址,怎样给多组数据分配地址,例如就是我要采集多个水泵的发回来的数值,怎样给各个水泵分配从站地址,每个水泵有发回来多个数据,有怎样给这些数据分配地址
问题补充:
多站点轮询之前,各个设备的从站地址是如何分配的,是厂家已经设置好的吗??
最佳答案
不用担心,modbus常见3个可能途径:
1.有LED屏,屏里通过按键在参数组里设置MODBUS 地址的
2.硬件地址拨码开关(一排白色的小开关)。
3.控制器预留了modbus的485接线端子。
(如PLC,变频器等)
看你的意思,应该是跟变频器通讯了。
想要控制电机和读回电机数据,可以这样:
1.建立数据块DBx,modbusmaster发送读写命令,
2.建立数据块DBy,接受从modbusslave读回来的数据(master发送写命令的时候不会返回读到的slave数据,发送读命令的时候就会返回一组数据)
感觉你是对modbus这个通讯概念不熟,多看网友提供的资料!先弄清楚你需要什么实现modbus的硬件和软件!!~描叙下你是什么CPU,采集的电机数据,是从什么地方采集,plc还是变频器等还是现场仪表。
昆仑通态ModbusTcp通讯总结

昆仑通态ModbusTcp通讯总结
1、Modbus 地址
通常 Modbus 地址由 5 位数字组成,包括起始的数据类型代号,以及后面的偏移地址。
Modbus Master 协议库把标准的 Modbus 地址映射为所谓 Modbus 功能号,读写从站的数据。
Modbus Master 协议库支持如下地址:
00001 - 09999:数字量输出(线圈)
10001 - 19999:数字量输入(触点)
30001 - 39999:输入数据寄存器(通常为模拟量输入)
40001 - 49999:数据保持寄存器
2、主站和从站配置
上图:主站(客户机),这里为触屏电脑(TPC1062K),读取从站(WNC 采集器或者测试过程中使用的PC机),设置本地IP地址为:192.168.0.2,端口号为3000。
从站(服务器),产生变化数据的源端,这里是利用PC机来模拟(WNC 采集器)。
上图中读写4区通道D40001和D40002是按双字节操作读取第1和第2通道(Modbus中是以双字节为一个通道单元,WUB代表Word unsigned binary)。
上图中读写4区通道D40003和D40005是按四字节操作读取第3和第5通道(Modbus中是以双字节为一个通道单元,第3通道实际包括了第3和第4通道;第5通道实际包含了第5和第6通道,DF代表double word float)。
3、ModbusTcp主从站通讯测试视频
测试视频进入网页中下载:TPC1062K的ModbusTcp 测试视频.mp4。
modbus TCP从站设置

MODBUS TCP/IP从站设置
可以通过MODBUS TCP/IP协议,在局域网内对对触摸屏进行远程的通信与控制。
从站1设置:
一、设置IP
首先使用拨码开关1、3设置触摸屏的IP地址和端口号,该例中设置从站屏的IP地址为:192.168.1.31,端口号为:502。
(具体操作见案例说明“外部拨码开关”部分,端口号要设置为502不能更改)二、建立连接
建立工程后,在下图的位置双击“连接1
弹出“通讯口属性”对话框(如下图示)
在上图所示的对话框中,进行下列设置:
*连接接口:选择为“以太网”(如图所示)
*HMI位置:选择为“本机”(如图所示)
*连接服务:选择为“Mosbus”-“Modbus Slave TCP/IP"
(如图所示)
在弹出的“通讯口属性”对话框点击“参数”,进入下图所示对话框设置IP地址和端口号,设置完成点击“确定”。
三、在画面上做相应的控件
如下图做几个“数值输入与显示”的控件。
做完上述设置,将程序下载到屏内,将主从站连接到路由器或者直接连接,进行监视和控制操作。
从站2设置、从站3设置:
按照从站1的设置方式,分别设置从站2的IP地址为
192.168.1.30,从站3的IP地址为192.168.1.200.并做对应控件
注:1、屏做从站时使用的地址为屏的内部地址。
2、端口号设置为502。
ER 系列工业机器人 ModbusTCP 调试手册说明书
ER系列工业机器人ModbusTCP调试手册(RCS2 V1.5)修订记录目录前言 (3)第1 章功能简介 (4)第2 章ModBusTcp协议介绍 (4)2.1 ModBusTCP协议报文 (4)2.2 ModBusTCP协议功能码 (5)2.3 ER系列机器人ModBusTCP接口定义 (5)第3 章ModBusTCP点表 (7)第4 章接口调试 (12)4.1 ModScan调试助手 (12)4.2虚拟数字量交互示例 (14)4.3虚拟模拟量交互示例 (16)4.4远程启动机器人程序 (17)4.5远程加载机器人程序 (18)4.6远程复位程序指针 (20)4.7调试注意事项 (21)前言概述本手册适用于控制系统RCS2 V1.5,描述埃斯顿二代控制器ModBusTcp协议接口功能介绍。
读者对象本手册仅供受过培训,熟悉各种适用国家标准的“控制、自动化和驱动工程”领域专业人员。
●系统生产商:对自动化系统功能设计的技术人员。
●系统集成商:指自动化设备集成的技术人员。
注意事项●在安装和调试这些组件时,操作人员必须严格遵循本文档的说明和解释。
●相关负责人员必须确保所述产品的应用或使用满足所有安全要求,包括相关法律、法规、准则和标准。
●尽管本文档经过精心编制,但由于其中所描述的产品仍处于不断更新换代中,我们可能不会在每次更新后都检查文档中所描述的产品性能数据、标准或其它特性总是与实际产品相一致。
●本文档中难免会出现一些技术或者编辑错误,我们保留随时对文档信息做出修改之权力,恕不另行通知。
对于已经变更的产品,如果本文档中的数据、图表以及文字描述没有修改,我们将不再特别加以声明。
●任何人不得对软、硬件配置进行文本档中规定之外的修改,ESTUN公司对因此而造成的一切后果不承担任何责任。
●本文档中出现图示单位在没有特别标注说明时,默认单位为毫米mm。
安全说明第 1 章功能简介ModBusTcp协议接口是指外部逻辑控制器(PLC等)通过标准工业总线协议(ModBusTCP)与机器人通讯,读写机器人的虚拟IO端口的一种通讯方式。
Modbus TCP IP
硬件配置参数设置设备命令设备说明#ModbusTCP/IP数据转发设备1、设备简介本驱动构件用于MCGS软件作为ModbusTCP Slave (从站),将各种寄存器的数据通过ModbusTCP协议转发给ModbusTCP Master (主站);此时MCGS作为网络服务端,而ModbusTCP Master做为网络客户端向服务端发出请求帧,服务端收到合理请求帧后,回应数据帧。
本驱动构件多用于同MCGS“标准ModbusTCP设备”成对配合使用,以实现MCGS 软件与软件、软件与触摸屏(TPC),或触摸屏与触摸屏之间数据交互的目的。
同时也可用于MCGS软件、触摸屏与其他软件触摸屏通讯数据交互,但协议及解码格式需遵从MCGS标准。
本驱动支持01、02、03、04、05、06、15、16常用功能码,对功能码支持请参见2、硬件连接MCGS软件在通讯之前,请保证通讯连接正确。
通讯连接方式:采用标准的RJ45接口的以太网接线(对调网线或使用HUB交换)。
3、设备通讯参数“通用TCP/IP父设备”通讯参数设置如下:网络类型:网络通讯模式,请与设备设置一致。
默认为UDP,一般标准ModbusTCP设备多设置为“1 - TCP”模式通讯。
服务器/客户设置:请设置为“1 –服务器”方式,即:做为服务器端,接受客户端访问。
本地IP地址:执行机的本机IP地址。
请根据实际情况,正确填写执行上位机或TPC 的本机IP地址。
本地端口号:执行机的网络操作端口,设置前要确保设置端口不被其他程序占用。
一般按默认值3000设置或设置为ModbusTCP标准的502端口。
远端IP地址:客户端(即:ModbusTCP主站)的IP地址。
请根据实际情况,正确填写相应IP地址。
(注意:在局域网时,服务器端IP地址和客户端IP地址需要在同一个子网内。
即:要求点分四段IP表示法的前三段地址要相同)。
远端端口号:客户端(即:ModbusTCP主站)的网络操作端口,一般按默认值3000即可。
MODBUSTCP-IP协议

以太网帧格式历史上以太网帧格式有五种:1. EthernetVI :这是最原始的一种格式,是由GeroGPARC 提出的 3MbpsCSMA/CD以太网标准的封装格式,后来在 1980年由DEC , In tel和GeroG 标准化形成Et hernetV1 标准.2. EthernetV2(ARPA) :由 DEC,In tel 和 GeroG 在 1982 年公布其标准,主要更改了 EthernetV1 的电气特性和物理接口,在帧格式上并无变化;EthernetV2 出现后迅速取代 EthernetV1 成为以太网事实标准;EthernetV2 帧头结构为 6bPtes的源地址+6bPtes的目标地址 +2BPtes的协议类型字段+数据。
3. RAW802.3 :这是1983年Novell发布其划时代的Netware/86 网络套件时采用的私有以太网帧格式,该格式以当时尚未正式发布的802.3标准为基础;但是当两年以后IEEE正式发布 802.3标准时情况发生了变化一IEEE在802.3帧头中又加入了8 02.2LLC(LogicalLinkControl) 头,这使得 Novell 的 RAW802.3 格式跟正式的 IEEE802.3标准互不兼容.4.802.3/802.2LLC :这是IEEE 正式的 802.3标准,它由 EthernetV2 发展而来。
它将EthernetV2 帧头的协议类型字段替换为帧长度字段(取值为0000-05dc;十进制的【网络架构】MODBUSTCPip 协议以盘网RS-4851500);并加入 802.2LLC 头用以标志上层协议,LLC头中包含 DSAP , SSAP 以及 Crontrol 字段.5.802.3/802.2SNAP :这是IEEE 为保证在 802.2LLC 上支持更多的上层协议同时更好的支持 IP协议而发布的标准,与802.3/802.2LLC 一样802.3/802.2SNAP 也带有LLC头,但是扩展了LLC属性,新添加了一个 2BPtes的协议类型域(同时将 SAP的值置为 AA ),从而使其可以标识更多的上层协议类型;另外添加了一个3BPte s的0UI字段用于代表不同的组织,RFC1042 定义了 IP报文在802.2网络中的封装方法和 ARP协议在802.2SANP 中的实现.802.3以太网帧格式备注:前导码(7字节)、帧起始定界符(1字节)、目的MAC地址(6字节)、源MAC 地址(6字节)、类型/长度(2字节)、数据(46~1500字节)、帧校验序列(4字节) [MAC地址可以用 2 — 6字节来表示,原则上是这样,实际都是6字节]以太网帧格式总结MAC地址厂商的查询的网址:全部厂商列表:[url]/reqauth/oui/oui.tGt[/url] _______网页查询地址:[url]/regauth/oui/indeG.shtml[/url] _________在 SearchthepublicOUIlisting... 输入网卡 MAC 地址前三位即可,如00-0D-65==>Start:目前,有四种不同格式的以太网帧在使用,它们分别是:•Ether net II即DIG2.0 : GeroG 与DEC、Intel在1982 年制定的以太网标准帧格式。
modbustcp指令讲解

modbustcp指令讲解摘要:一、modbustcp指令简介二、modbustcp指令使用方法1.基本语法2.参数说明3.实例演示三、modbustcp指令的应用场景1.远程控制设备2.数据采集与监控3.自动化控制系统四、modbustcp指令的优缺点1.优点2.缺点五、总结与展望正文:一、modbustcp指令简介modbustcp指令是一种用于Modbus协议的传输层通信指令。
Modbus 协议是一种工业自动化和控制系统的通信协议,广泛应用于各种设备和系统之间的高效数据传输。
modbustcp指令主要用于实现Modbus TCP/IP协议,实现设备之间的远程控制和数据交换。
二、modbustcp指令使用方法1.基本语法modbustcp指令的基本语法如下:```modbustcp <设备地址> <功能码> <数据区>```2.参数说明- 设备地址:表示要访问的设备地址,范围为0-255。
- 功能码:表示要执行的操作,如读取、写入等,范围为0-4095。
- 数据区:表示要操作的数据区域,如输入、输出等。
3.实例演示以下是一个modbustcp指令的实例:```modbustcp 1 0x03 0 100 200 400```这个实例表示要向设备地址为1的设备发送一个功能码为0x03(读取离散输入)的请求,数据区为0,数据长度为100,数据起始地址为200,数据结束地址为400。
三、modbustcp指令的应用场景1.远程控制设备:通过modbustcp指令,可以实现对远程设备的控制和监控,如开关控制、参数设置等。
2.数据采集与监控:modbustcp指令可以用于实时采集设备的数据,并对数据进行处理和分析,以便及时调整设备的工作状态。
3.自动化控制系统:在自动化控制系统中,modbustcp指令可以用于实现设备之间的通信和协同工作。
四、modbustcp指令的优缺点1.优点- 传输速度快:modbustcp指令采用TCP/IP协议,具有较高的传输速度。
modbustcp连接参数

modbustcp连接参数
Modbus TCP连接参数主要包括以下几项:
1. 服务器IP地址和端口:这是客户端用来连接服务器的地址和端口。
2. 连接超时:指定客户端在尝试与服务器建立连接时可以等待的时间长度。
3. 读取超时:指定客户端在尝试读取数据时可以等待的时间长度。
4. 最大连接数:指定服务器可以同时处理的客户端连接数。
5. 心跳间隔:指定客户端与服务器之间定期发送的心跳包的间隔时间。
6. 数据包最大长度:指定可以发送或接收的数据包的最大长度。
7. 地址映射表:指定客户端地址和服务器地址之间的映射关系。
以上信息仅供参考,如需获取更多详细信息,建议咨询专业人士。
Modbus-MODBUS-TCP-协议解析

缺点:
实时性较差
SUPCON
应用行业规模
TCP/IP 已成为信息行业的事实标准:世界上93%的网络都 使用TCP/IP,只要在应用层使用Modbus TCP,就可实现工 业以太网数据交换;
Modbus协议是一项应用层报文传输协议,包括ASCII、 RTU、TCP三种报文类型,协议本身并没有定义物理层, 只是定义了控制器能够认识和使用的消息结构,而不管 他们是经过何种网络进行通信的。
标准的Modbus协议物理层接口有RS232、RS422、RS485 和以太网口。采用Master/Slave(主/从)方式通信。
TCP/IP栈
SUPCON
SUPCON
通信应用层
Modbus客户机:允许用户应用控制与远程设备的信息交换。 Modbus客户机根据用户应用向Modbus客户机接口的发送要 求中所包含的参数来建立一个Modbus请求。
Modbus客户机接口:Modbus客户机接口提供一个接口,使 得用户应用能够生成各类Modbus服务的请求,该服务包括 对Modbus应用对象的访问。
目前中国已把Modbus TCP作为工业网络标准之一。在国外 ,Modbus TCP被国际半导体业SEMI定为网络标准,国际水 处理、电力系统也把它作为应用的事实标准,还有越来越 多行业把Modbus TCP作为标准来用;
访问控制:
在某些至关重要的场合,必须禁止无关的主机对设备 内部数据的访问。
SUPCON TCP/IP栈层
可以对TCP/IP的栈进行参数配置,以适用于不同的产品或
modbustcp主机与从机通信时在同一网段这个端口号设置成一样还是不一样?

modbustcp主机与从机通信时在同一网段这个端口号设置成
一样还是不一样?
modbus tcp 主机与从机通信时在同一网段这个端口号设置成一样还是不一样?
两台plc走的是modbustcp通信,其中一个做主机,一个做从机,这个主机的ip地址是192.168.0.1,端口号是502,那么从机的ip地址设置成192.168.0.2,那么此时这个端口号是设置成502还是除502其它的数?
是否还有一种是两台plc的ip地址设置成一样,把端口号设置成不同的值也可以通信?端口号不同,而ip设置成一样,也能区别这两台设备?
ip地址与端口号这个概念如何理解和区分?
最佳答案
在同一个网络上,ip是门牌号,不能重复的;
端口号是每个ip内部的小编号,可以任意使用,因此两个设备进行通讯的时候,端口号可以一样,也可以不一样。
Modbus从站协议

Modbus从站协议
Modbus从站协议1.与主站协议相同首先分配存储区地址:
此处不在赘述,参考Mosbus主站协议。
2.进入编程阶段
网络1为Mosbus从站指令的初始化程序,编程时用SM0.1进行
程序初始化;网络1中需注意环节说明:
1):Mode 启动/停止Modbus 1==启动;0==停止;
2):Addr 从站地址;例子为与上位机通讯,因此为PLC的地址。
此为:2 3):MAXIQ 参与通讯的最大I/Q点数,根据实际情况填写S7-200最大默认缺省值为128;
4)MAXAI 参数通讯的最大AI通道数,根据实际情况填写,可为16/32;5)MAXHold 参与通讯的V存储区字,根据需要定义大小;
6)HoldStart 保持寄存器起始地址:以&VBx制定(间接寻址);
说明:此存储区地址不能与Modbus指令分配的地址冲突且在程
序其他位置不能被占用;
网络2不做说明,无需私改;
若上位机需读取数据,遵从以上规范
如果已知S7-200中的V存储区地址,推算Modbus地址的公式如下:
Modbus地址 = 40000 + (T/2+1) ; T为偶数
4 .若需读取V存储区地址,首先将需采集的数据传送到HoldStart 定义的存储
区中在用以上方式访问。
tGW715设定成从Modbus RTU主站到Modbus TCP从站

(結束)
泓格科技網頁(ICP DAS): 聯絡方式 (E-Mail): service@ , service.icpdas@
tGW-7ቤተ መጻሕፍቲ ባይዱ0 Series
FAQ
FAQ
1. 問: tGW-715 如何設定成轉換命令自 Modbus RTU (Master) 到 Modbus TCP (Slave)?
答:
為了能轉換命令訊息自 Modbus RTU (Master) 成為 Modbus TCP (Slave),而不是 常見的從 Modbus TCP (Master) 至 Modbus RTU (Slave)。您必須在網頁設定中變 更一些設定, 請執行下列步驟:
1
Step 1:
在一開始設定該台 tGW-700 的 IP 位置後,接著先進入網頁設定(在瀏覽器網址 列上打上模組的 IP)
Step 2:
在網頁最上方選擇【Port1】,並在該下方『Pair-Connection Settings』的部份 『Server Mode』選擇為 【Client】 『Remote Server IP』打上遠端主機的 IP 位置 『Remote TCP Port』打上任意的 Port 接著按下 『Submit』。
範例: 『Server Mode』:【Client】 『Remote Server IP』:【120.126.XXX.XXX】 『Remote TCP Port』:【502】
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.首先在Workplace AX里面设置搭建JACE为Modbus TCP 从站,在station/Config/Drivers/ 新建
一条ModbusTcpSlaveNetwork ;
Nmc Tjcc Sabi EwUtd "fjjtCaus:IT
g li^aralbehisk¥醐31峪点冲W' Inpe
1 平PodtwTqiS妙诧nidxji TcpSkveiMint〔園\W
VKbul Shi 憎和"I HK
『愕说处
Ni~Ee p'DA::
别r NetwDnL
屯btfesisns
hciwc^mtefiMiE;J Ui'itiB Async '«tv 二比丁上吐UE E JGFI旷IF」口•
1 归itus Ts GMWff/
□ U^hjiTcrNrutn.
2SisjsTi herMou
2 hro
勺fu£Mirfial
gOoclJewch
J P咗hdMQ^.
宿弼d syG制柑丸怦述怜血册耐Eye lelwMfviifreli
-3 RJb曲点机代
ModbusTcpSlaveNetwork驱动搭建好之后,在网络驱动目录下新建一个ModbusTcpSlave Device;
.在设备point里面设置变量,Palette/Modbus Tcp Slave/Server Points 下选择点进行添加;
四.在station/Config/Drivers/ 新建一条ModbusAsyncNetwork ;
2.3
-91
泡刃由 a#
奮 證左垮一
^
十
声?
o
f
f
l
世$*电Q BJ 眷須
量0^
"UJ- 鱼m
屈高口I1J' E
E 咅SMPN:
- t 2
3121
二 r s s a l
^m
艺夕屈匸跑b ILI
H a m
i ^n r a
m -E
1
^ -
i
胃.4
t
丘
玄珂m
f
r
1::
l u..・ “,,:”m ..'-",.I <
-1 J1: ..I'l g r -^
w t M cl m
V15±,§1
b
「/
.
1■ i
囂
眞
电
占”JS H I N
I
K A
Q III
B l “
UJa-PHfsar-® 虫
n
' i.
n
TJI
J
<粵
懸M 佟媳怒假痛・K 芒
OMoNOUAS<snqpolAI
w
M
六.将仪表采集的点与
Modbus Tcp Slave 下面的点进行关联性操作, Link ;
Ft E# S OT - Bjlials Tmh Irriiw Vie 幻赵 Hqi 4 - V” i?台叶;.£;• . M ?rr fl
tri
m
BUsttmiH $g 眄 ;
■ 35 Irfll
申.H«Wl 邸再
&星也昭筍化舷 :* EQ iuk ■:
FI ] M T SflUW H D HJ TRI 却 =\ 3tva E 1心时訴*¥:4: 三]0V>t 』T¥鑿碍Ife ■,曲 i J 生TT Sau kk
f Can 旳京 学二他 Si 工R JTGE 甲 C '曲 1 耳U Fbsfers :題如 毎■阳 血也|HAy *
” ■ Vsct 二 Hf.
屮阳*・ LiirgWir
Bhn □鲨 氓叱
% C^pzz
■feRiStn
Rt 申 注n EffihxKE 7i± MM E E-B 沁 卯Aral E 前,:r ;二 I
B < Y 业内GClH 刚
.讯:nt dfC iirart + 1时心肮
&f fafH
列WKk 3 i i 血 rwiMv’ j!谀 刃 1Sn^in 壬:M :血说 ±7 ;a :他鈕 *: .-' 4™;-^^'=- <r^ &Z H M H = A E loiter)
•ht
•傅r 址
A EOE
“
:
■r :-r
-' I
七.启用Modbus TCP 测试工具进行测试
Read/Write De{imtion
Add 哙M ;
D
PrgtQGQkddre^. E® 4EH 10
Scan Rate: 1000 [ms] D
_ Re-ad/Wrile Diwbled Dis 日t )l 日 on error
Rows
o 10 20 50 100 Fit to Q uantit^
_ Hide Columns PL 匚 Add less 囲(Base 1J
Addr«$s in Cell
E riran/D^niel Mods
设置站点号
rn- t* 箕・P ^IMWVI r igtai Mtowv
档!
Slaye ID: Function: 03Read Holding Registers [4M ]
Read/Write Once
设置IP
能够读取到数据测试成功!。