Pix4D使用手册(测绘版)
Pix4D操作指南(测绘版)

Pix4D操作指南(测绘版)简介Pix4D是一款用于处理无人机获取的图像数据的软件,可以生成高精度测绘数据,用于建筑、农业、城市规划等领域。
本文介绍了Pix4D的基本操作步骤。
步骤1. 导入图像数据:Pix4D支持多种格式的图像,如JPG、TIFF和RAW格式。
在软件中选择“New Project”,然后选择图像数据的根目录,在“Image Properties”中设置图像相关参数。
2. 标注控制点:在“GCP/MTP Manager”中标注重要控制点,用于测量图像的尺度和精度。
可以手动标注或者导入地面控制点坐标。
3. 拍摄时间标定:在“Image Properties Editor”中标定每张图像的拍摄时间,用于在后续操作中对图像进行精准匹配。
4. 运行相机标定:在“Calibrate”选项卡中对相机进行标定,以获得相机内部参数和畸变矫正参数。
5. 运行图像匹配:在“Process”选项卡中运行图像匹配算法,用于将图像进行匹配、三维重建和贴合。
6. 生成测绘数据:在“Generate”选项卡中生成测绘数据,如DSM、DTM、DEM、点云等。
注意事项- 确保图像数据的质量和数量足够,以保证生成的测绘数据准确性。
- 在标注控制点时,最好选择明显且相互独立的地理特征点,以免产生误差。
- 标定相机时,建议使用至少10张以上的图像来提高标定的精度。
- 在软件运行过程中,建议关闭其他运行的程序,以保证计算机资源充足。
结论本文介绍了Pix4D的基本操作步骤和注意事项,希望可以帮助使用此软件进行测绘任务的人员顺利完成任务。
如需了解更多细节,请参考官方网站或用户手册。
Pix4Dmapper作业指导(航测版)
中海达Pix4Dmapper简易作业手册(航测版)1 作业流程图 (2)2 原始资料准备 (2)3 建立工程并导入数据 (3)3.1. 建立工程 (3)3.2. 加入影像 (3)3.3. 设置影像属性 (4)4 快速处理检查(可选) (5)5 加入控制点 (7)5.1 方法1:使用像控点编辑器加入控制点 (7)5.2 方法2:在空三射线编辑器中刺出控制点。
(8)5.3 方法3:在空三射线编辑器中使用预测控制点功能标记控制点。
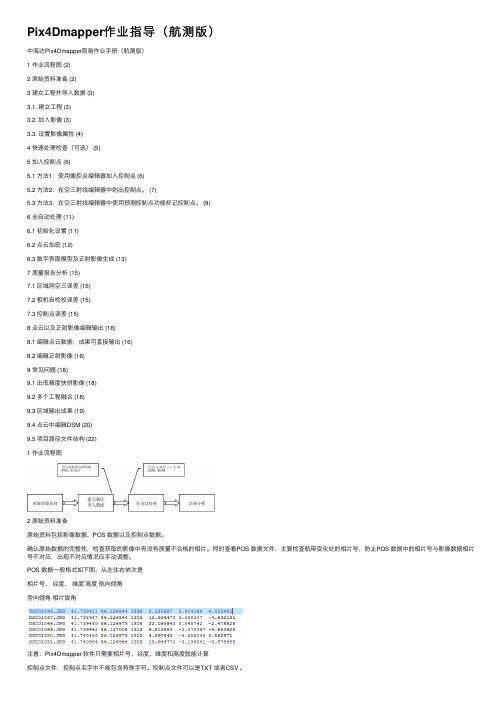
(10)6 全自动处理 (12)6.1 初始化设置 (12)6.2 点云加密 (13)6.3 数字表面模型及正射影像生成 (14)7 质量报告分析 (16)7.1 区域网空三误差 (16)7.2 相机自检校误差 (16)7.3 控制点误差 (16)8 点云以及正射影像编辑输出 (17)8.1 编辑点云数据,成果可直接输出 (17)8.2 编辑正射影像 (17)9 常见问题 (19)9.1 出低精度快拼影像 (19)9.2 多个工程融合 (19)9.3 区域输出成果 (20)9.4 点云中编辑DSM (21)9.5 项目路径文件结构 (23)1 作业流程图2 原始资料准备原始资料包括影像数据、POS 数据以及控制点数据。
确认原始数据的完整性,检查获取的影像中有没有质量不合格的相片。
同时查看POS 数据文件,主要检查航带变化处的相片号,防止POS 数据中的相片号与影像数据相片号不对应,出现不对应情况应手动调整。
POS 数据一般格式如下图,从左往右依次是相片号、 经度、 维度 高度 航向倾角 旁向倾角 相片旋角注意:Pix4Dmapper 软件只需要相片号、经度、维度和高度就能计算控制点文件,控制点名字中不能包含特殊字符。
控制点文件可以是TXT 或者CSV 。
获取原始资料 建立测区 导入数据 全自动处理 结果分析导入的数据包括图像、POS 、控制点 自动完成空三,生成DSM 、DOM3建立工程并导入数据3.1.建立工程打开pix4dmapper,选项目-新建项目,在弹出来的对话框中设置工程的属性,如下图所示,选上航拍项目,不勾植被和倾斜项目,然后输入工程名字,设置路径(工程名字以及工程路径不能包含中文)。
Pix4d mapper中文版操作手册

Pix4d mapper中文版操作手册Pix4D Mapper是一款功能强大的图像处理软件,能够将无人机、航空摄影或激光扫描等数据转换为精准的地理信息系统(GIS)数据和三维模型。
本操作手册将详细介绍Pix4D Mapper中文版的使用方法和功能。
一、安装和设置1. 下载Pix4D Mapper中文版软件,并按照安装向导进行安装。
2. 打开软件后,首次使用需要进行一些初步设置,包括选择工作目录、设定图像处理参数等。
请按照提示进行操作。
二、数据导入和处理1. 在主界面中点击“新建项目”按钮,选择要处理的数据源,可以是无人机拍摄的照片、航空摄影图像或激光扫描点云数据。
2. 在导入数据后,Pix4D Mapper会自动进行图像匹配和点云生成的处理过程。
您可以根据需要选择不同的处理选项和参数。
3. 等待处理完成后,可以查看生成的三维模型、点云或地图。
三、地理坐标系和坐标系转换1. Pix4D Mapper支持多种地理坐标系和坐标系转换。
在菜单栏中选择“项目”-“坐标系”,可以进行坐标系设置和转换。
2. 您可以选择合适的坐标系进行地理坐标的显示和数据的输出。
四、地图和影像发布1. 在处理完成后,您可以将生成的地图和影像发布到云端或本地服务器上,以便与他人共享或在线浏览。
2. 在菜单栏中选择“输出”-“发布”,按照向导进行操作即可。
五、更多功能和工具1. Pix4D Mapper还提供了许多其他功能和工具,包括体积计算、标注和测量工具等,可以根据您的需求选择使用。
2. 您可以通过在菜单栏中浏览不同的选项和功能来了解更多详情。
六、软件更新和技术支持1. Pix4D Mapper定期发布更新版本,添加新功能和改进现有功能。
您可以在菜单栏中选择“帮助”-“检查更新”来获取最新版本。
2. 如果您在使用过程中遇到问题或需要技术支持,可以访问官方网站或联系Pix4D团队获取帮助。
总结:本操作手册介绍了Pix4D Mapper中文版的安装和设置、数据导入和处理、地理坐标系和坐标系转换、地图和影像发布、更多功能和工具以及软件更新和技术支持等方面的内容。
Pix4D使用手册(测绘版)
天津众恒地信科技有限公司Pix4D作业流程手册(测绘版)1 作业流程图 (3)2 原始资料准备 (3)3 建立工程并导入数据 (5)3.1. 建立工程 (5)3.2. 加入影像 (5)3.3. 设置影像属性 (6)4 快速处理检查(可选) (8)5 加入控制点 (10)5.1 方法1:使用像控点编辑器加入控制点 (10)5.2 方法2:在空三射线编辑器中刺出控制点。
(12)5.3 方法3:在空三射线编辑器中使用预测控制点功能标记控制点。
(14)6 全自动处理 (18)6.1 初始化设置 (18)6.2 点云加密 (20)6.3 数字表面模型及正射影像生成 (23)页脚内容17 质量报告分析 (25)7.1 区域网空三误差 (25)7.2 相机自检校误差 (25)7.3 控制点误差 (25)8 点云以及正射影像编辑输出 (27)8.1 编辑点云数据,成果可直接输出 (27)8.2 编辑正射影像 (27)9 常见问题 (31)9.1 出低精度快拼影像 (31)9.2 多个工程融合 (31)9.3 区域输出成果 (33)9.4 点云中编辑DSM (34)9.5 项目路径文件结构 (37)页脚内容21作业流程图获取原建立测全自动结果分2原始资料准备原始资料包括影像数据、POS数据以及控制点数据。
确认原始数据的完整性,检查获取的影像中有没有质量不合格的相片。
同时查看POS数据文件,主要检查航带变化处的相片号,防止POS 数据中的相片号与影像数据相片号不对应,出现不对应情况应手动调整。
POS数据一般格式如下图,从左往右依次是相片号、经度、维度高度航向倾角旁向倾角相片旋角注意:Pix4Dmapper软件只需要相片号、经度、维度和高度就能计算控制点文件,控制点名字中不能包含特殊字符。
控制点文件可以是TXT或者CSV。
页脚内容3页脚内容43建立工程并导入数据3.1.建立工程打开pix4dmapper,选项目-新建项目,在弹出来的对话框中设置工程的属性,如下图所示,选上航拍项目,不勾植被和倾斜项目,然后输入工程名字,设置路径(工程名字以及工程路径不能包含中文)。
Pix4D使用手册
Pix4D使用手册Pix4D是一款领先的基于图像处理的3D建模和映像处理软件,用户可以使用Pix4D进行高效的地形建模、超详细的三维模型制作、以及高精度的测量和分析。
Pix4D支持多种数据源,包括遥感图像、地面照片、无人机或飞行器拍摄的照片等等。
在使用Pix4D之前,用户需要仔细阅读使用手册,深入了解该软件的使用方法,从而更好地应用Pix4D进行项目建模和测绘。
1.软件安装2.数据导入3.项目创建4.数据处理5.测量和分析6.输出和导出Pix4D软件目前支持Windows和Mac操作系统,用户可以在官网上下载。
下载后,用户需要根据自己的操作系统进行安装。
Pix4D支持多种数据来源的导入,包括:手持相机、无人机、航拍影像、卫星影像等等。
用户需要选择相应的数据来源,设置数据属性和分辨率等参数,进行数据的导入。
在Pix4D中,用户需要首先创建一个新的项目,然后对该项目进行数据处理和分析。
为了创建一个新的项目,用户需要依次在菜单中选择File->New Project,然后输入项目名称、选择数据来源、设置坐标系等信息,点击创建按钮完成项目的创建。
在Pix4D中,用户可以对导入的数据进行处理和分析。
数据处理包括图像匹配、3D点云生成、模型生成等步骤。
用户需要在项目界面中选择处理选项并设置处理参数,从而将数据转换为3D模型和高精度地图。
通过Pix4D,用户可以利用生成的3D模型和高精度地图进行各种测量和分析操作。
这包括测量距离、面积、体积、倾斜角度等,也包括进行可视化分析和数据挖掘等操作。
在Pix4D中,用户可以选择多种输出格式,包括3D模型、高清地图、数字高程模型等。
用户也可以将数据导出到其他软件中进行进一步的操作或应用。
在项目界面中,用户需要选择输出选项并设置输出参数,然后点击导出按钮即可完成数据的导出。
以上就是Pix4D使用手册的介绍。
用户需要深入了解Pix4D的各个功能和参数设置,从而能够更好地应用该软件进行高效准确的建模和测绘。
pix4d数据操作流程

解决方案:重启软件或电脑,检查软件 版本是否最新,联系技术支持
PART SIX
新增功能和特性 修复已知问题 改进用户体验 对未来发展的影响
自动化和智能化: 提高数据处理速度 和精度,减少人工 干预
云服务和大数据: 实现大规模数据处 理和实时分析
文化遗产保护:利用PIX4D技术对文物进行数字化建模,为文化遗产的数字化保护和修复提 供支持。
灾害评估:利用PIX4D数据处理结果,评估灾害影响范围和程度,为灾后重建和风险管理提 供依据。
PART FIVE
确保数据路径正确,避免出 现找不到数据的情况
确保数据格式正确,避免出 现乱码或无法解析的情况
跨平台和移动应用 :提供更便捷的数 据获取和展示方式
定制化和插件化: 满足不同行业和项 目的需求,提供更 丰富的功能和工具
自动化程度更高
增强实时监测和预警功能
添加标题
添加标题
集成更多数据处理和分析工具
添加标题
添加标题
优化用户界面,提高易用性
汇报人:
精度评估方法:比较原始数据与处 理后数据的差异
精度影响因素:数据来源、处理算 法、传感器性能等
添加标题添加标题源自添加标题添加标题精度指标:包括平面精度、高程精 度等
精度提高措施:优化数据处理算法、 采用更高精度传感器等
城市规划:利用PIX4D数据处理结果,分析城市空间结构和规划方案的有效性。
农业监测:通过PIX4D数据处理,实现农作物生长状况、病虫害预警等方面的监测。
参数配置:根据需 求设置飞行高度、 方向、速度等参数
生成正射影像: 根据设置的参数 生成正射影像图
Pix4Dmapper作业指导(航测版)

中海达Pix4Dmapper简易作业手册(航测版)1 作业流程图 (2)2 原始资料准备 (2)3 建立工程并导入数据 (3)3.1. 建立工程 (3)3.2. 加入影像 (3)3.3. 设置影像属性 (4)4 快速处理检查(可选) (5)5 加入控制点 (6)5.1 方法1:使用像控点编辑器加入控制点 (6)5.2 方法2:在空三射线编辑器中刺出控制点。
(7)5.3 方法3:在空三射线编辑器中使用预测控制点功能标记控制点。
(9)6 全自动处理 (11)6.1 初始化设置 (11)6.2 点云加密 (12)6.3 数字表面模型及正射影像生成 (13)7 质量报告分析 (15)7.1 区域网空三误差 (15)7.2 相机自检校误差 (15)7.3 控制点误差 (15)8 点云以及正射影像编辑输出 (16)8.1 编辑点云数据,成果可直接输出 (16)8.2 编辑正射影像 (16)9 常见问题 (18)9.1 出低精度快拼影像 (18)9.2 多个工程融合 (18)9.3 区域输出成果 (19)9.4 点云中编辑DSM (20)9.5 项目路径文件结构 (22)1 作业流程图2 原始资料准备原始资料包括影像数据、POS 数据以及控制点数据。
确认原始数据的完整性,检查获取的影像中有没有质量不合格的相片。
同时查看POS 数据文件,主要检查航带变化处的相片号,防止POS 数据中的相片号与影像数据相片号不对应,出现不对应情况应手动调整。
POS 数据一般格式如下图,从左往右依次是相片号、 经度、 维度 高度 航向倾角 旁向倾角 相片旋角注意:Pix4Dmapper 软件只需要相片号、经度、维度和高度就能计算控制点文件,控制点名字中不能包含特殊字符。
控制点文件可以是TXT 或者CSV 。
获取原始资料 建立测区 导入数据 全自动处理 结果分析导入的数据包括图像、POS 、控制点 自动完成空三,生成DSM 、DOM3建立工程并导入数据3.1.建立工程打开pix4dmapper,选项目-新建项目,在弹出来的对话框中设置工程的属性,如下图所示,选上航拍项目,不勾植被和倾斜项目,然后输入工程名字,设置路径(工程名字以及工程路径不能包含中文)。
pix4d操作流程

pix4d操作流程
操作Pix4D的一般流程如下:
1. 收集图像:使用无人机或其他航拍工具收集高分辨率图像。
确保图像拍摄时具有重叠度,以便在后续处理中生成准确的三维模型。
2. 图像导入:将收集到的图像导入Pix4D软件。
确保选择正
确的投影系统和坐标系统,并进行必要的校准和校正。
3. 图像对齐:Pix4D会自动对齐图像以匹配特征点和地面控制点。
初始对齐完成后,可以手动调整图像对齐以获得更好的结果。
4. 特征点提取:Pix4D会自动提取图像中的特征点,并计算每
个特征点的相机位置。
这些特征点将用于后续的建模和测量。
5. 点云生成:利用特征点,Pix4D会生成一组离散的三维点云。
可以选择不同的输出选项和参数来优化点云生成的精度和密度。
6. 表面重建:利用生成的点云,Pix4D会生成三维模型的表面
重建。
可以选择不同的算法和参数来生成不同质量和分辨率的表面模型。
7. 贴图和纹理映射:将图像的纹理映射到三维模型的表面,以获得更真实的模型外观。
可以选择不同的纹理映射算法和参数来优化纹理映射的质量。
8. 分析和测量:利用生成的三维模型,可以进行各种分析和测量,例如体积计算、距离测量、曲面分析等。
9. 导出和共享:将生成的结果导出为各种格式,如点云格式、三维模型格式、图像格式等。
可以将结果共享给其他用户,以便进一步处理或与他人合作。
请注意,具体的操作流程可能会因为Pix4D的版本和使用环境的不同而有所不同。
建议参考Pix4D的官方文档和教程以获取更准确和详细的操作指导。
Pix4D使用手册(测绘版)教学提纲
P i x4D使用手册(测绘版)天津众恒地信科技有限公司Pix4D作业流程手册(测绘版)1作业流程图 (2)2原始资料准备 (2)3建立工程并导入数据 (3)3.1.建立工程 (3)3.2.加入影像 (3)3.3.设置影像属性 (4)4快速处理检查(可选) (6)5加入控制点 (8)5.1方法1:使用像控点编辑器加入控制点 (8)5.2方法2:在空三射线编辑器中刺出控制点。
(10)5.3方法3:在空三射线编辑器中使用预测控制点功能标记控制点。
(12)6全自动处理 (15)6.1初始化设置 (15)6.2点云加密 (17)6.3数字表面模型及正射影像生成 (19)7质量报告分析 (22)7.1区域网空三误差 (22)7.2相机自检校误差 (22)7.3控制点误差 (22)8点云以及正射影像编辑输出 (24)8.1编辑点云数据,成果可直接输出 (24)8.2编辑正射影像 (24)9常见问题 (27)9.1出低精度快拼影像 (27)9.2多个工程融合 (27)9.3区域输出成果 (29)9.4点云中编辑DSM (30)9.5项目路径文件结构 (32)1作业流程图2原始资料准备原始资料包括影像数据、POS数据以及控制点数据。
确认原始数据的完整性,检查获取的影像中有没有质量不合格的相片。
同时查看POS数据文件,主要检查航带变化处的相片号,防止POS数据中的相片号与影像数据相片号不对应,出现不对应情况应手动调整。
POS数据一般格式如下图,从左往右依次是相片号、经度、维度高度航向倾角旁向倾角相片旋角注意:Pix4Dmapper软件只需要相片号、经度、维度和高度就能计算控制点文件,控制点名字中不能包含特殊字符。
控制点文件可以是TXT或者CSV。
获取原始资料建立测区导入数据全自动处理结果分析导入的数据包括图像、POS、控制点自动完成空三,生成DSM、DOM3建立工程并导入数据3.1.建立工程打开pix4dmapper,选项目 -新建项目,在弹出来的对话框中设置工程的属性,如下图所示,选上航拍项目,不勾植被和倾斜项目,然后输入工程名字,设置路径(工程名字以及工程路径不能包含中文)。
Pix4Dmapper教程
中海达Pix4Dmapper简易作业手册1 作业流程图 (3)2 原始资料准备 (3)3 建立工程并导入数据 (5)3.1. 建立工程 (5)3.2. 加入影像 (5)3.3. 设置影像属性 (6)4 快速处理检查(可选) (8)5 加入控制点 (10)5.1 方法1:使用像控点编辑器加入控制点 (10)5.2 方法2:在空三射线编辑器中刺出控制点。
(12)5.3 方法3:在空三射线编辑器中使用预测控制点功能标记控制点。
(14)6 全自动处理 (17)6.1 初始化设置 (17)6.2 点云加密 (19)6.3 数字表面模型及正射影像生成 (21)7 质量报告分析 (24)7.1 区域网空三误差 (24)7.2 相机自检校误差 (24)7.3 控制点误差 (24)8 点云以及正射影像编辑输出 (26)8.1 编辑点云数据,成果可直接输出 (26)8.2 编辑正射影像 (26)9 常见问题 (30)9.1 出低精度快拼影像 (30)9.2 多个工程融合 (30)9.3 区域输出成果 (32)9.4 项目路径文件结构 (34)1作业流程图2原始资料准备原始资料包括影像数据、POS数据、相机文件以及控制点数据。
确认原始数据的完整性,检查获取的影像中有没有质量不合格的相片。
同时查看POS 数据文件,主要检查航带变化处的相片号,防止POS数据中的相片号与影像数据相片号不对应,出现不对应情况应手动调整。
POS数据格式如下图,从左往右依次是相片号、经度、维度、高度、航向倾角、旁向倾角、相片旋角通常我们可以使用软件数据库中的相机文件,如果软件数据库中没有外业航拍使用的相机,就需要设置相机参数。
获取原始资料建立测区导入数据全自动处理结果分析导入的数据包括图像、POS、控制点、相机参数自动完成空三,生成DSM、DOM控制点文件,有时候为了方便内业刺控制点,控制点名字包含了点所在的一张相片号。
3建立工程并导入数据3.1.建立工程打开pix4dmapper,选项目-新建项目,在弹出来的对话框中设置工程的属性,如下图所示,选上航拍项目,不勾植被和倾斜项目,然后输入工程名字,设置路径(工程名字以及工程路径不能包含中文)。
Pix4d_mapper中文版操作手册

Pix4d_mapper中文版操作手册关键信息项:1、软件名称:Pix4d_mapper 中文版2、适用平台:____________________________3、主要功能:____________________________4、操作流程:____________________________5、系统要求:____________________________6、技术支持:____________________________11 软件概述Pix4d_mapper 中文版是一款功能强大的图像处理软件,专门用于将航拍图像或地面拍摄的图像转换为精确的地图和三维模型。
111 软件特点高精度的图像匹配和处理算法。
支持多种图像格式。
直观的用户界面,易于操作。
112 应用领域测绘与地理信息系统。
建筑与工程。
农业与林业。
12 系统要求操作系统:Windows 10/11,Mac OS X 等。
处理器:多核处理器,建议英特尔 i5 或更高。
内存:至少 8GB,建议 16GB 或更多。
显卡:具有独立显卡,支持 OpenGL 41 及以上。
存储空间:足够的硬盘空间用于存储图像和处理结果。
13 软件安装下载安装程序。
运行安装程序,按照提示进行操作。
激活软件,输入有效的许可证密钥。
21 图像采集准备选择合适的相机和拍摄设备。
规划拍摄航线和拍摄角度,确保图像覆盖全面且有足够的重叠度。
211 图像导入启动 Pix4d_mapper 中文版。
选择“导入图像”选项。
选择要处理的图像文件夹。
212 图像预处理图像自动对齐和匹配。
检查和删除错误或质量差的图像。
22 点云生成设置点云生成参数,如分辨率、密度等。
开始生成点云。
221 三维模型构建基于点云构建三维模型。
优化和修复三维模型。
222 地图生成选择地图类型,如正射影像图、等高线图等。
设置地图参数,如比例尺、坐标系等。
23 成果输出选择输出格式,如 JPEG、TIFF 等。
Pix4Dmapper作业指导(航测版)
Pix4Dmapper作业指导(航测版)中海达Pix4Dmapper简易作业⼿册(航测版)1 作业流程图 (2)2 原始资料准备 (2)3 建⽴⼯程并导⼊数据 (3)3.1. 建⽴⼯程 (3)3.2. 加⼊影像 (3)3.3. 设置影像属性 (4)4 快速处理检查(可选) (5)5 加⼊控制点 (6)5.1 ⽅法1:使⽤像控点编辑器加⼊控制点 (6)5.2 ⽅法2:在空三射线编辑器中刺出控制点。
(7)5.3 ⽅法3:在空三射线编辑器中使⽤预测控制点功能标记控制点。
(9)6 全⾃动处理 (11)6.1 初始化设置 (11)6.2 点云加密 (12)6.3 数字表⾯模型及正射影像⽣成 (13)7 质量报告分析 (15)7.1 区域⽹空三误差 (15)7.2 相机⾃检校误差 (15)7.3 控制点误差 (15)8 点云以及正射影像编辑输出 (16)8.1 编辑点云数据,成果可直接输出 (16)8.2 编辑正射影像 (16)9 常见问题 (18)9.1 出低精度快拼影像 (18)9.2 多个⼯程融合 (18)9.3 区域输出成果 (19)9.4 点云中编辑DSM (20)9.5 项⽬路径⽂件结构 (22)1 作业流程图2 原始资料准备原始资料包括影像数据、POS 数据以及控制点数据。
确认原始数据的完整性,检查获取的影像中有没有质量不合格的相⽚。
同时查看POS 数据⽂件,主要检查航带变化处的相⽚号,防⽌POS 数据中的相⽚号与影像数据相⽚号不对应,出现不对应情况应⼿动调整。
POS 数据⼀般格式如下图,从左往右依次是相⽚号、经度、维度⾼度航向倾⾓旁向倾⾓相⽚旋⾓注意:Pix4Dmapper 软件只需要相⽚号、经度、维度和⾼度就能计算控制点⽂件,控制点名字中不能包含特殊字符。
控制点⽂件可以是TXT 或者CSV 。
3建⽴⼯程并导⼊数据3.1.建⽴⼯程打开pix4dmapper,选项⽬-新建项⽬,在弹出来的对话框中设置⼯程的属性,如下图所⽰,选上航拍项⽬,不勾植被和倾斜项⽬,然后输⼊⼯程名字,设置路径(⼯程名字以及⼯程路径不能包含中⽂)。
pix4dcapture使用方法
Pix4Dcapture是一款专业的用于航空摄影和地图绘制的无人机飞行计划软件。
以下是使用Pix4Dcapture的基本步骤:
1. **选择合适的飞行任务类型**:
- 在Pix4Dcapture中,你可以选择不同类型的飞行任务,比如“Grid Mission”(网格任务)或者“Area Survey”(区域勘测),根据你的需求选择合适的任务类型。
2. **选择无人机和相机**:
- 在Pix4Dcapture中,你需要选择你将要使用的无人机和相机型号,确保选择的无人机和相机受到Pix4Dcapture支持。
3. **设定飞行区域**:
- 在地图上选择你想要进行航拍的区域,设定飞行的起点和终点。
根据需要,你还可以调整航线之间的重叠度和航线间距等参数。
4. **设定飞行高度和参数**:
- 根据你的项目需求,设定飞行高度、相机倾角以及其他相关的飞行参数。
5. **执行飞行任务**:
- 将无人机连接到Pix4Dcapture,并在应用程序中启动飞行任务。
Pix4Dcapture会自动控制无人机完成预定的飞行任务,进行航拍并记录数据。
6. **数据处理**:
- 完成飞行任务后,你可以使用Pix4Dmapper或其他相关的软件来处理航拍数据,生成地图、模型或其他分析结果。
值得注意的是,Pix4Dcapture的具体操作步骤可能会因软件版本更新而有所变化,建议在使用时参考最新的官方文档或指南。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
天津众恒地信科技有限公司Pix4D作业流程手册(测绘版)1作业流程图 (2)2原始资料准备 (2)3建立工程并导入数据 (3)3.1.建立工程 (3)3.2.加入影像 (3)3.3.设置影像属性 (4)4快速处理检查(可选) (5)5加入控制点 (6)5.1方法1:使用像控点编辑器加入控制点 (6)5.2方法2:在空三射线编辑器中刺出控制点。
(7)5.3方法3:在空三射线编辑器中使用预测控制点功能标记控制点。
(9)6全自动处理 (11)6.1初始化设置 (11)6.2点云加密 (12)6.3数字表面模型及正射影像生成 (13)7质量报告分析 (15)7.1区域网空三误差 (15)7.2相机自检校误差 (15)7.3控制点误差 (15)8点云以及正射影像编辑输出 (16)8.1编辑点云数据,成果可直接输出 (16)8.2编辑正射影像 (16)9常见问题 (18)9.1出低精度快拼影像 (18)9.2多个工程融合 (18)9.3区域输出成果 (19)9.4点云中编辑DSM (20)9.5项目路径文件结构 (22)1作业流程图2原始资料准备原始资料包括影像数据、POS数据以及控制点数据。
确认原始数据的完整性,检查获取的影像中有没有质量不合格的相片。
同时查看POS 数据文件,主要检查航带变化处的相片号,防止POS数据中的相片号与影像数据相片号不对应,出现不对应情况应手动调整。
POS数据一般格式如下图,从左往右依次是相片号、经度、维度高度航向倾角旁向倾角相片旋角注意:Pix4Dmapper软件只需要相片号、经度、维度和高度就能计算控制点文件,控制点名字中不能包含特殊字符。
控制点文件可以是TXT或者CSV。
获取原始资料建立测区导入数据全自动处理结果分析导入的数据包括图像、POS、控制点自动完成空三,生成DSM、DOM3建立工程并导入数据3.1.建立工程打开pix4dmapper,选项目-新建项目,在弹出来的对话框中设置工程的属性,如下图所示,选上航拍项目,不勾植被和倾斜项目,然后输入工程名字,设置路径(工程名字以及工程路径不能包含中文)。
新建项目选上,然后选择下一步Next。
3.2.加入影像点添加图像,选择加入的影像。
影像路径可以不在工程文件夹中,路径中不要包含中文。
点Next。
3.3.设置影像属性✓图像坐标系设置POS数据坐标系,默认是WGS84(经纬度)坐标。
✓地理定位和方向设置POS数据文件,点从文件选择POS文件。
✓相机型号设置相机文件。
通常软件能够自动识别影像相机模型。
确认各项设置后,点Next进入下一步。
然后点击Finish完成工程的建立。
4快速处理检查(可选)这一步可以不做,只是起到一个检查作用。
快速处理出来的结果精度比较低,所以快速处理的速度会快很多。
因此快速处理建议在飞行现场进行,发现问题方便及时处理。
如果快速处理失败了,那么后续的操作也可能出现相同结果。
点运行,选择本地处理。
设置如下图,初步处理和快速检测选上,其他不选,点开始,等待软件运行完,可以查看快速处理得到的成果(一张的影像拼图),检查快速处理质量报告。
质量报告主要检查两个问题,Dataset以及Camera optimization quality。
Dataset(数据集):在快速处理过程中所有的影像都会进行匹配,这里我们需要确定大部分或者所有的影像都进行了匹配。
如果没有就表明飞行时相片间的重叠度不够或者相片质量太差。
Camera optimization quality(相机参数优化质量):最初的相机焦距和计算得到的相机焦距相差不能超过5%,不然就是最初选择的相机模型有误,重新设置。
5加入控制点控制点必须在测区范围内合理分布,通常在测区四周以及中间都要有控制点。
要完成模型的重建至少要有3个控制点。
通常100张相片6个控制点左右,更多的控制点对精度也不会有明显的提升(在高程变化大的地方更多的控制点可以提高高程精度)。
控制点不要做在太靠近测区边缘的位置,控制点最好能够在5张影像上能同时找到(至少要两张)。
5.1方法1:使用像控点编辑器加入控制点这种方法需要逐个控制点在相片上刺出,刺出后可以由软件自动完成初步处理、生成点云、生成DSM以及正射影像。
5.1. 1加入控制点文件点项目,选择像控点编辑器。
出现如下对话框。
点击增加像控点后,图像会出现在对话框中,可以逐个刺出控制点。
选择导入像控点。
在出来的对话框中设置像控点坐标系、导入像控点文件(csv格式)。
5.1. 2在图像上刺出控制点在左侧的图像列表中选中图像,右侧就会显示出该图像。
在对应的位置上,鼠标左键击图像中的点,标出控制点位置。
一个控制点最少要在两张图像上标出来,通常建议标注在3-8张图像上。
在质量报告中会显示是否需要在更多的图像上标出控制点。
设置完成后,点OK。
控制点就加入到了工程里面。
5.2方法2:在空三射线编辑器中刺出控制点。
这种方法先进行初步处理后在空三射线编辑器显示控制点,是通过POS数据预测出所有控制点位置。
这种情况适用于软件坐标系统库中可以找到POS数据坐标系统与GCP坐标系统,这两个坐标系统不一定要相同,软件会自动将他们转化成同一个坐标系统。
使用这种方法添加控制点,在初步处理后需要手动设置控制点。
5.2. 1加入控制点到工程中按照5.1.1的步骤,加入控制点到工程中。
不把他们在图像上标注出来。
5.2. 2完成初步处理点击菜单栏运行,选择本地处理,把初步处理以及高精度处理选上,点云以及正射影像先不生成。
点开始进行处理。
5.2. 3在空三射线编辑器中刺出控制点GCP。
点击菜单栏的视图,打开空三射线编辑器,可以看到生成的连接点以及系统预测的控制点位置(蓝色的圆圈,中间有一个小点),如下图所示。
在左侧的列表框中会显示这个控制点所在的所有图像的相片,在每张相片是上左击图像,标出控制点的准确位置(至少标出两张)。
这时控制点的标记会变成一个黄色的框中间有黄色的叉,表示这个控制点已经被标记(标了两张相片后,这个标记中间多了一个绿色的叉,则表示这个控制点已经重新参与计算重新得到的位置)。
如下图所示。
检查其他影像上的绿色标志,如果绿色标记与控制点位置能够对应上,那么这个控制点不需要再标注,否则需要在更多的影像上标记出这个控制点。
当所有图像中的绿色标记的位置都在正确的位置上以后,点APPL Y(应用)。
如下图。
然后对其他的控制点分别进行上面的操作。
当所有的点都标记完成后,点菜单栏运行,选择Reoptimize(重新优化),把新加入的控制点加入重建,重新生成结果。
检查质量报告。
5.3方法3:在空三射线编辑器中使用预测控制点功能标记控制点。
这种方法先进行初步处理后,在空三射线编辑器中设置3个控制点,确定坐标系统,然后系统自动计算出其他控制点的位置。
这种方法适用于以下两种情况:●没有影像位置数据POS数据,但是有地面控制点数据。
●GCP数据坐标系统与POS数据坐标系统关系未知(互相之间不知道怎么转化)。
5.3. 1完成初步处理点击菜单栏运行,选择本地处理,把初步处理以及高精度处理选上,点云以及正射影像先不生成。
点开始进行处理。
5.3. 2设置GCP坐标系统点击菜单栏项目,选择像控点编辑器,在出现的对话框中点击坐标系,出现如下对话框,选择坐标系统的输入方式。
设置好GCP坐标系统后点OK。
5.3. 3在空三射线编辑器中刺出GCP点击菜单栏视图,选择空三射线编辑器,出现如下视图,软件生成的连接点会显示在三维视图中。
在三维视图中点击靠近控制点附近位置的点,在右侧的视图中找到该控制点的准确位置。
点击新建连接点。
出现如下对话框,在表格中双击单元格设置该控制点的属性。
名称、类型(设置为3DGCP)、坐标、允许误差等。
在右侧的影像视图中左键点击影像,在两张影像上面刺出这个控制点的准确位置。
在一张影像上刺出这个控制点后,该位置会出现一个黄色的标记,在另外一张相片上刺出这个控制点后,点击Optimize,该控制点在所有相片上相应的位置会有一个绿色的标记,表示系统自动计算出来的位置。
检查绿色的标记与实际控制点位置是否一致。
确认无误后点击Apply。
按以上步骤添加3个控制点后,按照5.1.1的方法把剩下的控制点添加到工程中。
系统会自动计算出新加入的控制点的位置信息,并且以蓝色的圈圈中间有一个点的标记表示。
调整控制点的位置使之与实际位置对应,方法类似 5.2.3。
逐个检查控制点的位置,没有问题后点击Apply。
然后继续设置其他控制点。
当所有控制点添加完成后,点击菜单栏运行,选择重新优化。
软件会把新加入的控制点参与重新计算。
6全自动处理点击菜单栏运行,选择本地处理,系统出现如下对话框。
在前面添加控制点过程中,如果初步处理已经运行了(使用方法2以及方法3选项添加控制点),那么这里就不需要再次运行了。
根据需要选择所需要运行的步骤,点击开始按钮运行。
开始处理前的一些设置(这里一般都是默认)可以设置生成的点云以及正射影像的范围,地图视图> 正射影像区> 绘定设置生成正射影像的范围,点云方法相同。
6.1初始化设置Processing格子中前面以及提及,这里不重复。
a.特征匹配设置处理单位像素大小,越大效果越好,花的时间也越多。
越小耗时越小。
b.优化环节包括了多次的空中三角测量、光束法局域网平差以及相机自检校计算。
Internal camera parameters、External camera parameters内部参数以及外部参数(可以分别理解为内方位元素以及外方位元素)。
✓Optimize external and all internals 通常无人机震动比较大,所以建议选这个,两个都进行优化计算。
✓Optimize external only 仅优化外部参数,如果使用的相机已经进行严格的检校,而且相机参数一定要被使用,我们就会选这个选项。
✓Optimize externals and leading internals 优化外部参数以及主要的内部参数。
对于视角相机模型主要的内部的参数包括相机焦距以及两个径向畸变参数,对于鱼眼镜头模型是指相机参数的多项式系数。
✓重新匹配影像选项对影像进行更多的匹配,会得到更好的匹配效果。
在测区内有大量植被、森林时建议选上,选上会增加处理时间。
c.输出✓Camera internals and externals, AA T, BBA生成相机内部参数以及外部参数、空三文件、区域网光束平差文件。
✓未畸变影像畸变纠正影像。
(如果提供了相机参数,在processing-save undistorted images中可以生成畸变纠正影像)✓低分辨率影像图勾选上可以生成低分辨率的影像图(快拼图)。
6.2点云加密a.像素比例✓Pixel Matching图像比例✓设置的越大生成的点越多,得到细节越多,花的时间也越多。