uPC2791TB中文资料
深圳市视美泰技术股份有限公司 AIoT-T972 V1.2 HDMI IN 4K 数字标牌 规格书说

AIoT-T972V1.2 HDMI IN版本4K数字标牌规格书文档修改历史版本描述日期V1.0创建2019-8-15修改为V1.1版本V1.12019-11-06PCB对应描述修改为V1.2版本V1.22020-08-12PCB对应描述目录第一章产品概述 (3)1.1适用范围.....................................................................................错误!未定义书签。
1.2产品概述.....................................................................................错误!未定义书签。
1.3产品特点.....................................................................................错误!未定义书签。
1.4外观及接口示意图.....................................................................错误!未定义书签。
第二章基本功能列表. (5)第三章PCB尺寸和接口布局 (7)3.1PCB尺寸图 (7)3.2接口参数说明 (8)第四章电气性能 (19)第五章组装使用注意事项 (20)第一章产品概述1.1AIoT-T972适用范围AIoT-T972属于安卓智能主板,普遍适用于智慧显示终端产品、视频类终端产品、工业自动化终端产品,如:广告机、数字标牌、智能自助终端、智能零售终端、O2O智能设备、工控主机、教育设备、机器人设备等。
1.2产品概述AIoT-T972采用晶晨T972芯片,四核Cortex-A55处理器,主频最高达1.9GHz;采用Mali-G31GPU;支持4K、H.265硬解码;搭载Android9.0系统;支持多路视频输出和输入;外围接口丰富,支持多款外设扩展;超低功耗、超强性能,是在商业展示、人机交互、工控项目上的最佳选择。
德州仪器(TI)LM3S2793系列规格书,Datasheet资料
TEXAS INSTRUMENTS-PRODUCTION DATAStellaris®LM3S2793MicrocontrollerDATA SHEETCopyright©2007-2012 DS-LM3S2793-11425CopyrightCopyright©2007-2012Texas Instruments Incorporated All rights reserved.Stellaris and StellarisWare®are registered trademarks of Texas Instruments Incorporated.ARM and Thumb are registered trademarks and Cortex is a trademark of ARM Limited.Other names and brands may be claimed as the property of others.PRODUCTION DATA information is current as of publication date.Products conform to specifications per the terms of Texas Instruments standard warranty.Production processing does not necessarily include testing of all parameters.Please be aware that an important notice concerning availability,standard warranty,and use in critical applications of Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.Texas Instruments Incorporated108Wild Basin,Suite350Austin,TX78746/stellaris/sc/technical-support/product-information-centers.htmStellaris®LM3S2793MicrocontrollerTable of ContentsRevision History (32)About This Document (43)Audience (43)About This Manual (43)Related Documents (43)Documentation Conventions (44)1Architectural Overview (46)1.1Overview (46)1.2Target Applications (48)1.3Features (48)1.3.1ARM Cortex-M3Processor Core (48)1.3.2On-Chip Memory (50)1.3.3External Peripheral Interface (51)1.3.4Serial Communications Peripherals (53)1.3.5System Integration (57)1.3.6Advanced Motion Control (63)1.3.7Analog (65)1.3.8JTAG and ARM Serial Wire Debug (66)1.3.9Packaging and Temperature (67)1.4Hardware Details (67)2The Cortex-M3Processor (68)2.1Block Diagram (69)2.2Overview (70)2.2.1System-Level Interface (70)2.2.2Integrated Configurable Debug (70)2.2.3Trace Port Interface Unit(TPIU) (71)2.2.4Cortex-M3System Component Details (71)2.3Programming Model (72)2.3.1Processor Mode and Privilege Levels for Software Execution (72)2.3.2Stacks (72)2.3.3Register Map (73)2.3.4Register Descriptions (74)2.3.5Exceptions and Interrupts (87)2.3.6Data Types (87)2.4Memory Model (87)2.4.1Memory Regions,Types and Attributes (89)2.4.2Memory System Ordering of Memory Accesses (90)2.4.3Behavior of Memory Accesses (90)2.4.4Software Ordering of Memory Accesses (91)2.4.5Bit-Banding (92)2.4.6Data Storage (94)2.4.7Synchronization Primitives (95)2.5Exception Model (96)2.5.1Exception States (97)2.5.2Exception Types (97)Table of Contents2.5.3Exception Handlers (100)2.5.4Vector Table (100)2.5.5Exception Priorities (101)2.5.6Interrupt Priority Grouping (102)2.5.7Exception Entry and Return (102)2.6Fault Handling (104)2.6.1Fault Types (104)2.6.2Fault Escalation and Hard Faults (105)2.6.3Fault Status Registers and Fault Address Registers (106)2.6.4Lockup (106)2.7Power Management (106)2.7.1Entering Sleep Modes (106)2.7.2Wake Up from Sleep Mode (107)2.8Instruction Set Summary (108)3Cortex-M3Peripherals (111)3.1Functional Description (111)3.1.1System Timer(SysTick) (111)3.1.2Nested Vectored Interrupt Controller(NVIC) (112)3.1.3System Control Block(SCB) (114)3.1.4Memory Protection Unit(MPU) (114)3.2Register Map (119)3.3System Timer(SysTick)Register Descriptions (121)3.4NVIC Register Descriptions (125)3.5System Control Block(SCB)Register Descriptions (138)3.6Memory Protection Unit(MPU)Register Descriptions (167)4JTAG Interface (177)4.1Block Diagram (178)4.2Signal Description (178)4.3Functional Description (179)4.3.1JTAG Interface Pins (179)4.3.2JTAG TAP Controller (181)4.3.3Shift Registers (181)4.3.4Operational Considerations (182)4.4Initialization and Configuration (184)4.5Register Descriptions (185)4.5.1Instruction Register(IR) (185)4.5.2Data Registers (187)5System Control (189)5.1Signal Description (189)5.2Functional Description (189)5.2.1Device Identification (190)5.2.2Reset Control (190)5.2.3Non-Maskable Interrupt (195)5.2.4Power Control (195)5.2.5Clock Control (196)5.2.6System Control (203)5.3Initialization and Configuration (205)5.4Register Map (205)Stellaris®LM3S2793Microcontroller5.5Register Descriptions (207)6Hibernation Module (295)6.1Block Diagram (296)6.2Signal Description (296)6.3Functional Description (297)6.3.1Register Access Timing (297)6.3.2Hibernation Clock Source (298)6.3.3System Implementation (299)6.3.4Battery Management (300)6.3.5Real-Time Clock (300)6.3.6Battery-Backed Memory (301)6.3.7Power Control Using HIB (301)6.3.8Power Control Using VDD3ON Mode (301)6.3.9Initiating Hibernate (301)6.3.10Waking from Hibernate (301)6.3.11Interrupts and Status (302)6.4Initialization and Configuration (302)6.4.1Initialization (302)6.4.2RTC Match Functionality(No Hibernation) (303)6.4.3RTC Match/Wake-Up from Hibernation (303)6.4.4External Wake-Up from Hibernation (304)6.4.5RTC or External Wake-Up from Hibernation (304)6.5Register Map (304)6.6Register Descriptions (305)7Internal Memory (322)7.1Block Diagram (322)7.2Functional Description (322)7.2.1SRAM (323)7.2.2ROM (323)7.2.3Flash Memory (325)7.3Register Map (330)7.4Flash Memory Register Descriptions(Flash Control Offset) (331)7.5Memory Register Descriptions(System Control Offset) (343)8Micro Direct Memory Access(μDMA) (359)8.1Block Diagram (360)8.2Functional Description (360)8.2.1Channel Assignments (361)8.2.2Priority (362)8.2.3Arbitration Size (362)8.2.4Request Types (362)8.2.5Channel Configuration (363)8.2.6Transfer Modes (365)8.2.7Transfer Size and Increment (373)8.2.8Peripheral Interface (373)8.2.9Software Request (373)8.2.10Interrupts and Errors (374)8.3Initialization and Configuration (374)8.3.1Module Initialization (374)Table of Contents8.3.2Configuring a Memory-to-Memory Transfer (374)8.3.3Configuring a Peripheral for Simple Transmit (376)8.3.4Configuring a Peripheral for Ping-Pong Receive (377)8.3.5Configuring Channel Assignments (380)8.4Register Map (380)8.5μDMA Channel Control Structure (381)8.6μDMA Register Descriptions (388)9General-Purpose Input/Outputs(GPIOs) (417)9.1Signal Description (417)9.2Functional Description (422)9.2.1Data Control (423)9.2.2Interrupt Control (424)9.2.3Mode Control (425)9.2.4Commit Control (425)9.2.5Pad Control (426)9.2.6Identification (426)9.3Initialization and Configuration (426)9.4Register Map (427)9.5Register Descriptions (430)10External Peripheral Interface(EPI) (473)10.1EPI Block Diagram (474)10.2Signal Description (475)10.3Functional Description (477)10.3.1Non-Blocking Reads (478)10.3.2DMA Operation (479)10.4Initialization and Configuration (479)10.4.1SDRAM Mode (480)10.4.2Host Bus Mode (484)10.4.3General-Purpose Mode (495)10.5Register Map (503)10.6Register Descriptions (504)11General-Purpose Timers (546)11.1Block Diagram (547)11.2Signal Description (547)11.3Functional Description (550)11.3.1GPTM Reset Conditions (551)11.3.2Timer Modes (551)11.3.3DMA Operation (557)11.3.4Accessing Concatenated Register Values (558)11.4Initialization and Configuration (558)11.4.1One-Shot/Periodic Timer Mode (558)11.4.2Real-Time Clock(RTC)Mode (559)11.4.3Input Edge-Count Mode (559)11.4.4Input Edge Timing Mode (560)11.4.5PWM Mode (561)11.5Register Map (561)11.6Register Descriptions (562)Stellaris®LM3S2793Microcontroller 12Watchdog Timers (593)12.1Block Diagram (594)12.2Functional Description (594)12.2.1Register Access Timing (595)12.3Initialization and Configuration (595)12.4Register Map (595)12.5Register Descriptions (596)13Analog-to-Digital Converter(ADC) (618)13.1Block Diagram (619)13.2Signal Description (620)13.3Functional Description (622)13.3.1Sample Sequencers (622)13.3.2Module Control (623)13.3.3Hardware Sample Averaging Circuit (625)13.3.4Analog-to-Digital Converter (626)13.3.5Differential Sampling (629)13.3.6Internal Temperature Sensor (632)13.3.7Digital Comparator Unit (632)13.4Initialization and Configuration (637)13.4.1Module Initialization (637)13.4.2Sample Sequencer Configuration (638)13.5Register Map (638)13.6Register Descriptions (640)14Universal Asynchronous Receivers/Transmitters(UARTs) (698)14.1Block Diagram (699)14.2Signal Description (699)14.3Functional Description (701)14.3.1Transmit/Receive Logic (701)14.3.2Baud-Rate Generation (702)14.3.3Data Transmission (703)14.3.4Serial IR(SIR) (703)14.3.5ISO7816Support (704)14.3.6Modem Handshake Support (704)14.3.7LIN Support (706)14.3.8FIFO Operation (707)14.3.9Interrupts (708)14.3.10Loopback Operation (709)14.3.11DMA Operation (709)14.4Initialization and Configuration (709)14.5Register Map (710)14.6Register Descriptions (712)15Synchronous Serial Interface(SSI) (762)15.1Block Diagram (763)15.2Signal Description (763)15.3Functional Description (764)15.3.1Bit Rate Generation (765)15.3.2FIFO Operation (765)15.3.3Interrupts (765)Table of Contents15.3.4Frame Formats (766)15.3.5DMA Operation (773)15.4Initialization and Configuration (774)15.5Register Map (775)15.6Register Descriptions (776)16Inter-Integrated Circuit(I2C)Interface (804)16.1Block Diagram (805)16.2Signal Description (805)16.3Functional Description (806)16.3.1I2C Bus Functional Overview (806)16.3.2Available Speed Modes (808)16.3.3Interrupts (809)16.3.4Loopback Operation (810)16.3.5Command Sequence Flow Charts (811)16.4Initialization and Configuration (818)16.5Register Map (819)16.6Register Descriptions(I2C Master) (820)16.7Register Descriptions(I2C Slave) (833)17Inter-Integrated Circuit Sound(I2S)Interface (842)17.1Block Diagram (843)17.2Signal Description (843)17.3Functional Description (845)17.3.1Transmit (846)17.3.2Receive (850)17.4Initialization and Configuration (852)17.5Register Map (853)17.6Register Descriptions (854)18Controller Area Network(CAN)Module (879)18.1Block Diagram (880)18.2Signal Description (880)18.3Functional Description (881)18.3.1Initialization (882)18.3.2Operation (883)18.3.3Transmitting Message Objects (884)18.3.4Configuring a Transmit Message Object (884)18.3.5Updating a Transmit Message Object (885)18.3.6Accepting Received Message Objects (886)18.3.7Receiving a Data Frame (886)18.3.8Receiving a Remote Frame (886)18.3.9Receive/Transmit Priority (887)18.3.10Configuring a Receive Message Object (887)18.3.11Handling of Received Message Objects (888)18.3.12Handling of Interrupts (890)18.3.13Test Mode (891)18.3.14Bit Timing Configuration Error Considerations (893)18.3.15Bit Time and Bit Rate (893)18.3.16Calculating the Bit Timing Parameters (895)Stellaris®LM3S2793Microcontroller 18.4Register Map (898)18.5CAN Register Descriptions (899)19Analog Comparators (930)19.1Block Diagram (931)19.2Signal Description (931)19.3Functional Description (932)19.3.1Internal Reference Programming (933)19.4Initialization and Configuration (934)19.5Register Map (935)19.6Register Descriptions (936)20Pulse Width Modulator(PWM) (944)20.1Block Diagram (945)20.2Signal Description (946)20.3Functional Description (949)20.3.1PWM Timer (949)20.3.2PWM Comparators (950)20.3.3PWM Signal Generator (951)20.3.4Dead-Band Generator (952)20.3.5Interrupt/ADC-Trigger Selector (952)20.3.6Synchronization Methods (953)20.3.7Fault Conditions (954)20.3.8Output Control Block (954)20.4Initialization and Configuration (955)20.5Register Map (956)20.6Register Descriptions (959)21Quadrature Encoder Interface(QEI) (1022)21.1Block Diagram (1022)21.2Signal Description (1023)21.3Functional Description (1024)21.4Initialization and Configuration (1027)21.5Register Map (1027)21.6Register Descriptions (1028)22Pin Diagram (1045)23Signal Tables (1047)23.1100-Pin LQFP Package Pin Tables (1048)23.2108-Ball BGA Package Pin Tables (1084)23.3Connections for Unused Signals (1120)24Operating Characteristics (1122)25Electrical Characteristics (1123)25.1Maximum Ratings (1123)25.2Recommended Operating Conditions (1123)25.3Load Conditions (1124)25.4JTAG and Boundary Scan (1124)25.5Power and Brown-Out (1126)25.6Reset (1127)25.7On-Chip Low Drop-Out(LDO)Regulator (1128)25.8Clocks (1128)Table of Contents25.8.1PLL Specifications (1128)25.8.2PIOSC Specifications (1129)25.8.3Internal30-kHz Oscillator Specifications (1129)25.8.4Hibernation Clock Source Specifications (1130)25.8.5Main Oscillator Specifications (1130)25.8.6System Clock Specification with ADC Operation (1131)25.9Sleep Modes (1131)25.10Hibernation Module (1131)25.11Flash Memory (1133)25.12Input/Output Characteristics (1133)25.13External Peripheral Interface(EPI) (1134)25.14Analog-to-Digital Converter(ADC) (1139)25.15Synchronous Serial Interface(SSI) (1140)25.16Inter-Integrated Circuit(I2C)Interface (1142)25.17Inter-Integrated Circuit Sound(I2S)Interface (1143)25.18Analog Comparator (1144)25.19Current Consumption (1145)25.19.1Nominal Power Consumption (1145)25.19.2Maximum Current Consumption (1146)A Register Quick Reference (1148)B Ordering and Contact Information (1184)B.1Ordering Information (1184)B.2Part Markings (1184)B.3Kits (1185)B.4Support Information (1185)C Package Information (1186)C.1100-Pin LQFP Package (1186)C.1.1Package Dimensions (1186)C.1.2Tray Dimensions (1188)C.1.3Tape and Reel Dimensions (1188)C.2108-Ball BGA Package (1190)C.2.1Package Dimensions (1190)C.2.2Tray Dimensions (1192)C.2.3Tape and Reel Dimensions (1193)List of FiguresFigure1-1.Stellaris LM3S2793Microcontroller High-Level Block Diagram (47)Figure2-1.CPU Block Diagram (70)Figure2-2.TPIU Block Diagram (71)Figure2-3.Cortex-M3Register Set (73)Figure2-4.Bit-Band Mapping (94)Figure2-5.Data Storage (95)Figure2-6.Vector Table (101)Figure2-7.Exception Stack Frame (103)Figure3-1.SRD Use Example (117)Figure4-1.JTAG Module Block Diagram (178)Figure4-2.Test Access Port State Machine (181)Figure4-3.IDCODE Register Format (187)Figure4-4.BYPASS Register Format (187)Figure4-5.Boundary Scan Register Format (188)Figure5-1.Basic RST Configuration (192)Figure5-2.External Circuitry to Extend Power-On Reset (192)Figure5-3.Reset Circuit Controlled by Switch (193)Figure5-4.Power Architecture (196)Figure5-5.Main Clock Tree (199)Figure6-1.Hibernation Module Block Diagram (296)ing a Crystal as the Hibernation Clock Source (299)ing a Dedicated Oscillator as the Hibernation Clock Source with VDD3ONMode (299)Figure7-1.Internal Memory Block Diagram (322)Figure8-1.μDMA Block Diagram (360)Figure8-2.Example of Ping-PongμDMA Transaction (366)Figure8-3.Memory Scatter-Gather,Setup and Configuration (368)Figure8-4.Memory Scatter-Gather,μDMA Copy Sequence (369)Figure8-5.Peripheral Scatter-Gather,Setup and Configuration (371)Figure8-6.Peripheral Scatter-Gather,μDMA Copy Sequence (372)Figure9-1.Digital I/O Pads (422)Figure9-2.Analog/Digital I/O Pads (423)Figure9-3.GPIODATA Write Example (424)Figure9-4.GPIODATA Read Example (424)Figure10-1.EPI Block Diagram (475)Figure10-2.SDRAM Non-Blocking Read Cycle (483)Figure10-3.SDRAM Normal Read Cycle (483)Figure10-4.SDRAM Write Cycle (484)Figure10-5.Example Schematic for Muxed Host-Bus16Mode (490)Figure10-6.Host-Bus Read Cycle,MODE=0x1,WRHIGH=0,RDHIGH=0 (492)Figure10-7.Host-Bus Write Cycle,MODE=0x1,WRHIGH=0,RDHIGH=0 (493)Figure10-8.Host-Bus Write Cycle with Multiplexed Address and Data,MODE=0x0,WRHIGH=0,RDHIGH=0 (493)Figure10-9.Host-Bus Write Cycle with Multiplexed Address and Data and ALE with DualCSn (494)Figure10-10.Continuous Read Mode Accesses (494)Figure10-11.Write Followed by Read to External FIFO (495)Figure10-12.Two-Entry FIFO (495)Figure10-13.Single-Cycle Write Access,FRM50=0,FRMCNT=0,WRCYC=0 (499)Figure10-14.Two-Cycle Read,Write Accesses,FRM50=0,FRMCNT=0,RDCYC=1,WRCYC=1 (499)Figure10-15.Read Accesses,FRM50=0,FRMCNT=0,RDCYC=1 (500)Figure10-16.FRAME Signal Operation,FRM50=0and FRMCNT=0 (500)Figure10-17.FRAME Signal Operation,FRM50=0and FRMCNT=1 (500)Figure10-18.FRAME Signal Operation,FRM50=0and FRMCNT=2 (501)Figure10-19.FRAME Signal Operation,FRM50=1and FRMCNT=0 (501)Figure10-20.FRAME Signal Operation,FRM50=1and FRMCNT=1 (501)Figure10-21.FRAME Signal Operation,FRM50=1and FRMCNT=2 (501)Figure10-22.iRDY Signal Operation,FRM50=0,FRMCNT=0,and RD2CYC=1 (502)Figure10-23.EPI Clock Operation,CLKGATE=1,WR2CYC=0 (503)Figure10-24.EPI Clock Operation,CLKGATE=1,WR2CYC=1 (503)Figure11-1.GPTM Module Block Diagram (547)Figure11-2.Timer Daisy Chain (553)Figure11-3.Input Edge-Count Mode Example (555)Figure11-4.16-Bit Input Edge-Time Mode Example (556)Figure11-5.16-Bit PWM Mode Example (557)Figure12-1.WDT Module Block Diagram (594)Figure13-1.Implementation of Two ADC Blocks (619)Figure13-2.ADC Module Block Diagram (620)Figure13-3.ADC Sample Phases (624)Figure13-4.Doubling the ADC Sample Rate (625)Figure13-5.Skewed Sampling (625)Figure13-6.Sample Averaging Example (626)Figure13-7.ADC Input Equivalency Diagram (627)Figure13-8.Internal Voltage Conversion Result (628)Figure13-9.External Voltage Conversion Result (629)Figure13-10.Differential Sampling Range,V IN_ODD=1.5V (630)Figure13-11.Differential Sampling Range,V IN_ODD=0.75V (631)Figure13-12.Differential Sampling Range,V IN_ODD=2.25V (631)Figure13-13.Internal Temperature Sensor Characteristic (632)Figure13-14.Low-Band Operation(CIC=0x0and/or CTC=0x0) (635)Figure13-15.Mid-Band Operation(CIC=0x1and/or CTC=0x1) (636)Figure13-16.High-Band Operation(CIC=0x3and/or CTC=0x3) (637)Figure14-1.UART Module Block Diagram (699)Figure14-2.UART Character Frame (702)Figure14-3.IrDA Data Modulation (704)Figure14-4.LIN Message (706)Figure14-5.LIN Synchronization Field (707)Figure15-1.SSI Module Block Diagram (763)Figure15-2.TI Synchronous Serial Frame Format(Single Transfer) (767)Figure15-3.TI Synchronous Serial Frame Format(Continuous Transfer) (767)Figure15-4.Freescale SPI Format(Single Transfer)with SPO=0and SPH=0 (768)Figure15-5.Freescale SPI Format(Continuous Transfer)with SPO=0and SPH=0 (768)Figure15-6.Freescale SPI Frame Format with SPO=0and SPH=1 (769)Figure15-7.Freescale SPI Frame Format(Single Transfer)with SPO=1and SPH=0 (770)Figure15-8.Freescale SPI Frame Format(Continuous Transfer)with SPO=1and SPH=0 (770)Figure15-9.Freescale SPI Frame Format with SPO=1and SPH=1 (771)Figure15-10.MICROWIRE Frame Format(Single Frame) (772)Figure15-11.MICROWIRE Frame Format(Continuous Transfer) (773)Figure15-12.MICROWIRE Frame Format,SSIFss Input Setup and Hold Requirements (773)Figure16-1.I2C Block Diagram (805)Figure16-2.I2C Bus Configuration (806)Figure16-3.START and STOP Conditions (807)plete Data Transfer with a7-Bit Address (807)Figure16-5.R/S Bit in First Byte (808)Figure16-6.Data Validity During Bit Transfer on the I2C Bus (808)Figure16-7.Master Single TRANSMIT (812)Figure16-8.Master Single RECEIVE (813)Figure16-9.Master TRANSMIT with Repeated START (814)Figure16-10.Master RECEIVE with Repeated START (815)Figure16-11.Master RECEIVE with Repeated START after TRANSMIT with RepeatedSTART (816)Figure16-12.Master TRANSMIT with Repeated START after RECEIVE with RepeatedSTART (817)Figure16-13.Slave Command Sequence (818)Figure17-1.I2S Block Diagram (843)Figure17-2.I2S Data Transfer (846)Figure17-3.Left-Justified Data Transfer (846)Figure17-4.Right-Justified Data Transfer (846)Figure18-1.CAN Controller Block Diagram (880)Figure18-2.CAN Data/Remote Frame (882)Figure18-3.Message Objects in a FIFO Buffer (890)Figure18-4.CAN Bit Time (894)Figure19-1.Analog Comparator Module Block Diagram (931)Figure19-2.Structure of Comparator Unit (933)parator Internal Reference Structure (933)Figure20-1.PWM Module Diagram (946)Figure20-2.PWM Generator Block Diagram (946)Figure20-3.PWM Count-Down Mode (951)Figure20-4.PWM Count-Up/Down Mode (951)Figure20-5.PWM Generation Example In Count-Up/Down Mode (952)Figure20-6.PWM Dead-Band Generator (952)Figure21-1.QEI Block Diagram (1023)Figure21-2.Quadrature Encoder and Velocity Predivider Operation (1026)Figure22-1.100-Pin LQFP Package Pin Diagram (1045)Figure22-2.108-Ball BGA Package Pin Diagram(Top View) (1046)Figure25-1.Load Conditions (1124)Figure25-2.JTAG Test Clock Input Timing (1125)Figure25-3.JTAG Test Access Port(TAP)Timing (1125)Figure25-4.Power-On Reset Timing (1126)Figure25-5.Brown-Out Reset Timing (1126)Figure25-6.Power-On Reset and Voltage Parameters (1127)Figure25-7.External Reset Timing(RST) (1127)Figure25-8.Software Reset Timing (1127)Figure25-9.Watchdog Reset Timing (1128)Figure25-10.MOSC Failure Reset Timing (1128)Figure25-11.Hibernation Module Timing with Internal Oscillator Running in Hibernation (1132)Figure25-12.Hibernation Module Timing with Internal Oscillator Stopped in Hibernation (1133)Figure25-13.SDRAM Initialization and Load Mode Register Timing (1134)Figure25-14.SDRAM Read Timing (1135)Figure25-15.SDRAM Write Timing (1135)Figure25-16.Host-Bus8/16Mode Read Timing (1136)Figure25-17.Host-Bus8/16Mode Write Timing (1136)Figure25-18.Host-Bus8/16Mode Muxed Read Timing (1137)Figure25-19.Host-Bus8/16Mode Muxed Write Timing (1137)Figure25-20.General-Purpose Mode Read and Write Timing (1138)Figure25-21.General-Purpose Mode iRDY Timing (1138)Figure25-22.ADC Input Equivalency Diagram (1140)Figure25-23.SSI Timing for TI Frame Format(FRF=01),Single Transfer TimingMeasurement (1141)Figure25-24.SSI Timing for MICROWIRE Frame Format(FRF=10),Single Transfer (1141)Figure25-25.SSI Timing for SPI Frame Format(FRF=00),with SPH=1 (1142)Figure25-26.I2C Timing (1143)Figure25-27.I2S Master Mode Transmit Timing (1143)Figure25-28.I2S Master Mode Receive Timing (1144)Figure25-29.I2S Slave Mode Transmit Timing (1144)Figure25-30.I2S Slave Mode Receive Timing (1144)Figure C-1.Stellaris LM3S2793100-Pin LQFP Package Dimensions (1186)Figure C-2.100-Pin LQFP Tray Dimensions (1188)Figure C-3.100-Pin LQFP Tape and Reel Dimensions (1189)Figure C-4.Stellaris LM3S2793108-Ball BGA Package Dimensions (1190)Figure C-5.108-Ball BGA Tray Dimensions (1192)Figure C-6.108-Ball BGA Tape and Reel Dimensions (1193)List of TablesTable1.Revision History (32)Table2.Documentation Conventions (44)Table2-1.Summary of Processor Mode,Privilege Level,and Stack Use (73)Table2-2.Processor Register Map (74)Table2-3.PSR Register Combinations (79)Table2-4.Memory Map (87)Table2-5.Memory Access Behavior (90)Table2-6.SRAM Memory Bit-Banding Regions (92)Table2-7.Peripheral Memory Bit-Banding Regions (92)Table2-8.Exception Types (98)Table2-9.Interrupts (99)Table2-10.Exception Return Behavior (104)Table2-11.Faults (104)Table2-12.Fault Status and Fault Address Registers (106)Table2-13.Cortex-M3Instruction Summary (108)Table3-1.Core Peripheral Register Regions (111)Table3-2.Memory Attributes Summary (114)Table3-3.TEX,S,C,and B Bit Field Encoding (117)Table3-4.Cache Policy for Memory Attribute Encoding (118)Table3-5.AP Bit Field Encoding (118)Table3-6.Memory Region Attributes for Stellaris Microcontrollers (118)Table3-7.Peripherals Register Map (119)Table3-8.Interrupt Priority Levels (146)Table3-9.Example SIZE Field Values (174)Table4-1.JTAG_SWD_SWO Signals(100LQFP) (178)Table4-2.JTAG_SWD_SWO Signals(108BGA) (179)Table4-3.JTAG Port Pins State after Power-On Reset or RST assertion (180)Table4-4.JTAG Instruction Register Commands (185)Table5-1.System Control&Clocks Signals(100LQFP) (189)Table5-2.System Control&Clocks Signals(108BGA) (189)Table5-3.Reset Sources (190)Table5-4.Clock Source Options (197)Table5-5.Possible System Clock Frequencies Using the SYSDIV Field (200)Table5-6.Examples of Possible System Clock Frequencies Using the SYSDIV2Field (200)Table5-7.Examples of Possible System Clock Frequencies with DIV400=1 (201)Table5-8.System Control Register Map (205)Table5-9.RCC2Fields that Override RCC Fields (226)Table6-1.Hibernate Signals(100LQFP) (296)Table6-2.Hibernate Signals(108BGA) (297)Table6-3.Hibernation Module Clock Operation (303)Table6-4.Hibernation Module Register Map (305)Table7-1.Flash Memory Protection Policy Combinations (326)er-Programmable Flash Memory Resident Registers (330)Table7-3.Flash Register Map (330)Table8-1.μDMA Channel Assignments (361)Table8-2.Request Type Support (363)Table8-3.Control Structure Memory Map (364)Table8-4.Channel Control Structure (364)Table8-5.μDMA Read Example:8-Bit Peripheral (373)Table8-6.μDMA Interrupt Assignments (374)Table8-7.Channel Control Structure Offsets for Channel30 (375)Table8-8.Channel Control Word Configuration for Memory Transfer Example (375)Table8-9.Channel Control Structure Offsets for Channel7 (376)Table8-10.Channel Control Word Configuration for Peripheral Transmit Example (377)Table8-11.Primary and Alternate Channel Control Structure Offsets for Channel8 (378)Table8-12.Channel Control Word Configuration for Peripheral Ping-Pong ReceiveExample (379)Table8-13.μDMA Register Map (380)Table9-1.GPIO Pins With Non-Zero Reset Values (418)Table9-2.GPIO Pins and Alternate Functions(100LQFP) (418)Table9-3.GPIO Pins and Alternate Functions(108BGA) (420)Table9-4.GPIO Pad Configuration Examples (426)Table9-5.GPIO Interrupt Configuration Example (427)Table9-6.GPIO Pins With Non-Zero Reset Values (428)Table9-7.GPIO Register Map (428)Table9-8.GPIO Pins With Non-Zero Reset Values (441)Table9-9.GPIO Pins With Non-Zero Reset Values (447)Table9-10.GPIO Pins With Non-Zero Reset Values (449)Table9-11.GPIO Pins With Non-Zero Reset Values (452)Table9-12.GPIO Pins With Non-Zero Reset Values (459)Table10-1.External Peripheral Interface Signals(100LQFP) (475)Table10-2.External Peripheral Interface Signals(108BGA) (476)Table10-3.EPI SDRAM Signal Connections (481)Table10-4.Capabilities of Host Bus8and Host Bus16Modes (485)Table10-5.EPI Host-Bus8Signal Connections (486)Table10-6.EPI Host-Bus16Signal Connections (488)Table10-7.EPI General Purpose Signal Connections (497)Table10-8.External Peripheral Interface(EPI)Register Map (503)Table11-1.Available CCP Pins (547)Table11-2.General-Purpose Timers Signals(100LQFP) (548)Table11-3.General-Purpose Timers Signals(108BGA) (549)Table11-4.General-Purpose Timer Capabilities (550)Table11-5.Counter Values When the Timer is Enabled in Periodic or One-Shot Modes (551)Table11-6.16-Bit Timer With Prescaler Configurations (552)Table11-7.Counter Values When the Timer is Enabled in RTC Mode (553)Table11-8.Counter Values When the Timer is Enabled in Input Edge-Count Mode (554)Table11-9.Counter Values When the Timer is Enabled in Input Event-Count Mode (555)Table11-10.Counter Values When the Timer is Enabled in PWM Mode (556)Table11-11.Timers Register Map (561)Table12-1.Watchdog Timers Register Map (596)Table13-1.ADC Signals(100LQFP) (620)Table13-2.ADC Signals(108BGA) (621)Table13-3.Samples and FIFO Depth of Sequencers (622)Table13-4.Differential Sampling Pairs (629)。
74LS279中文资料

© 2000 Fairchild Semiconductor Corporation DS006420August 1986Revised March 2000DM74LS279 Quad S-R LatchDM74LS279Quad S-R LatchGeneral DescriptionThe DM74LS279 consists of four individual and indepen-dent Set-Reset Latches with active low inputs. Two of the four latches have an additional S input ANDed with the pri-mary S input. A LOW on any S input while the R input is HIGH will be stored in the latch and appear on the corre-sponding Q output as a HIGH. A LOW on the R input while the S input is HIGH will clear the Q output to a LOW. Simul-taneous transition of the R and S inputs from LOW-to-HIGH will cause the Q output to be indeterminate. Both inputs are voltage level triggered and are not affected by transition time of the input data.Ordering Code:Devices also available in T ape and Reel. Specify by appending the suffix letter “X” to the ordering code.Connection Diagram Function TableH = HIGH Level L = LOW LevelQ 0 = The Level of Q before the indicated input conditions were established.Note 1: For latches with double S inputs:H = both S inputs HIGH L = one or both S inputs LOWNote 2: This output level is pseudo stable; that is, it may not persist whenthe S and R inputs return to their inactive (HIGH) level.Order Number Package NumberPackage DescriptionDM74LS279M M16A 16-Lead Small Outline Integrated Circuit (SOIC), JEDEC MS-012, 0.150 Narrow DM74LS279NN16E16-Lead Plastic Dual-In-Line Package (PDIP), JEDEC MS-001, 0.300 WideInputs Output S (Note 1)R Q L L H (Note 2)L H H H L L HHQ 0 2D M 74L S 279Absolute Maximum Ratings (Note 3)Note 3: The “Absolute Maximum Ratings” are those values beyond which the safety of the device cannot be guaranteed. The device should not be operated at these limits. The parametric values defined in the Electrical Characteristics tables are not guaranteed at the absolute maximum ratings.The “Recommended Operating Conditions” table will define the conditions for actual device operation.Recommended Operating ConditionsElectrical Characteristicsover recommended operating free air temperature range (unless otherwise noted)Note 4: All typicals are at V CC = 5V, T A = 25°C.Note 5: Not more than one output should be shorted at a time, and the duration should not exceed one second.Note 6: I CC is measured with all R inputs grounded, all S inputs at 4.5V and all outputs OPEN.Switching Characteristicsat V CC = 5V and T A = 25°CSupply Voltage 7V Input Voltage7VOperating Free Air Temperature Range 0°C to +70°C Storage Temperature Range−65°C to +150°CSymbol ParameterMin Nom Max Units V CC Supply Voltage4.7555.25V V IH HIGH Level Input Voltage 2V V IL LOW Level Input Voltage 0.8V I OH HIGH Level Output Current −0.4mA I OL LOW Level Output Current 8mA T AFree Air Operating Temperature70°CSymbol ParameterConditionsMinTyp Max Units (Note 4)V I Input Clamp Voltage V CC = Min, I I = −18 mA −1.5V V OH HIGH Level V CC = Min, I OH = Max 2.73.5VOutput Voltage V IL = Max, V IH = Min V OLLOW Level V CC = Min, I OL = Max0.350.5Output VoltageV IL = Max, V IH = Min VI OL = 4 mA, V CC = Min 0.250.4I I Input Current @ Max Input Voltage V CC = Max, V I = 7V 0.1mA I IH HIGH Level Input Current V CC = Max, V I = 2.7V 20µA I IL LOW Level Input Current V CC = Max, V I = 0.4V −0.4mA I OS Short Circuit Output Current V CC = Max (Note 5)−20−100mA I CCSupply CurrentV CC = Max (Note 6)3.87mAFrom (Input)R L = 2 k ΩSymbolParameterTo (Output)C L = 15 pF C L = 50 pF UnitsMinMax MinMax t PLH Propagation Delay Time S to Q 2225ns LOW-to-HIGH Level Output t PHL Propagation Delay Time S to Q 1523ns HIGH-to-LOW Level Output t PHLPropagation Delay Time R to Q2733ns HIGH-to-LOW Level OutputDM74LS279Physical Dimensions inches (millimeters) unless otherwise noted16-Lead Small Outline Integrated Circuit (SOIC), JEDEC MS-012, 0.150 NarrowPackage Number M16A4D M 74L S 279 Q u a d S -R L a t c hPhysical Dimensions inches (millimeters) unless otherwise noted (Continued)16-Lead Plastic Dual-In-Line Package (PDIP), JEDEC MS-001, 0.300 WidePackage Number N16EFairchild does not assume any responsibility for use of any circuitry described, no circuit patent licenses are implied and Fairchild reserves the right at any time without notice to change said circuitry and specifications.LIFE SUPPORT POLICYFAIRCHILD’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT DEVICES OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT OF FAIRCHILD SEMICONDUCTOR CORPORATION. As used herein:1.Life support devices or systems are devices or systems which, (a) are intended for surgical implant into the body, or (b) support or sustain life, and (c) whose failure to perform when properly used in accordance with instructions for use provided in the labeling, can be rea-sonably expected to result in a significant injury to the user. 2. A critical component in any component of a life support device or system whose failure to perform can be rea-sonably expected to cause the failure of the life support device or system, or to affect its safety or effectiveness.。
UPC2771TB-E3资料
Document No. P12710EJ2V0DS00 (2nd edition) Date Published June 1999 N CP(K)Printed in Japan1997, 1999©The mark shows major revised points.Data Sheet P12710EJ2V0DS002PIN CONNECTIONSMarking is an example of µPC2762TBPRODUCT LINE-UP (T A = +25 °C, V CC = V out = 3.0 V, Z L = Z S = 50 Ω)Part No.f u (GHz)P O (1 dB)(dBm)P O (sat)(dBm)G P (dB)I CC (mA)PackageMarkingµPC2762T 2.9+8.0+9.01326.56-pin minimold µPC2762TB 6-pin super minimoldµPC2763T 2.7+9.5+11.02027.06-pin minimold µPC2763TB 6-pin super minimoldµPC2771T 2.2+11.5+12.52136.06-pin minimold µPC2771TB6-pin super minimoldRemark Typical performance. Please refer to ELECTRICAL CHARACTERISTICS in detail.Notice The package size distinguishes between minimold and super minimold.C2HPin No.Pin Name 1INPUT 2GND 3GND 4OUTPUT 5GND 6V CC456321(Top View)C 1Z321456(Bottom View)C1ZC2AData Sheet P12710EJ2V0DS003SYSTEM APPLICATION EXAMPLEDigital cellular telephoneIPC2763TB PC2771TBµµNote The insertion point is different due to the specifications of conjunct devices.For conjunction with your devices, refer to the data sheets to confirm their conbination.PIN EXPLANATIONNote Pin voltage is measured at V CC = 3.0 V. Above: µPC2762TB, Center: µPC2763TB, Below: µPC2771TB.4Data Sheet P12710EJ2V0DS00ABSOLUTE MAXIMUM RATINGSRatingsParameter Symbol ConditionsµPC2762TBµPC2763TB µPC2771TBUnitSupply Voltage V CC T A = +25 °C, pin 4 and 6 3.6VTotal Circuit Current I CC T A = +25 °C7077.7mAPower Dissipation P D Mounted on double copper clad50 × 50 × 1.6 mm epoxy glass PWBT A = +85 °C200mWOperating AmbientTemperatureT A−40 to +85°C Storage Temperature T stg−55 to +150°C Input Power P in T A = +25 °C+10+13dBm RECOMMENDED OPERATING CONDITIONSParameter Symbol MIN.TYP.MAX.Unit RemarkSupply Voltage V CC 2.7 3.0 3.3V Same voltage should be applied to pin4 and 6.Operating AmbientTemperatureT A−40+25+85°C−Operating Frequency f opt0.8− 1.9GHz Only for µPC2771TBData Sheet P12710EJ2V0DS005ELECTRICAL CHARACTERISTICS (T A = +25 °C, V CC = V out = 3.0 V, Z L = Z S = 50 Ω)µPC2762TB, µPC2763TBµPC2762TBµPC2763TB Parameter Symbol Test ConditionsMIN.TYP.MAX.MIN.TYP.MAX.Unit Circuit Current I CC No signal−26.535.0−27.035.0mAPower Gain G P f = 0.9 GHzf = 1.9 GHz1111.51315.51617.5181820212324dBNoise Figure NF f = 0.9 GHzf = 1.9 GHz −−6.57.08.09.0−−5.55.57.07.5dBUpper Limit Operating Frequency f u 3 dB down belowfrom gain atf = 0.1 GHz2.7 2.9− 2.3 2.7−GHzIsolation ISL f = 0.9 GHzf = 1.9 GHz 22202725−−25243029−−dBInput Return Loss RL in f = 0.9 GHzf = 1.9 GHz 6.05.59.08.5−−8.08.011.011.0−−dBOutput Return Loss RL out f = 0.9 GHzf = 1.9 GHz 8.09.011.012.0−−5.06.07.09.0−−dB1 dB Gain Compres-sion Output Level P O (1 dB) f = 0.9 GHzf = 1.9 GHz+5.5+4.5+8.0+7.0−−+7.0+4.0+9.5+6.5−−dBmµPC2771TBµPC2771TB Parameter Symbol Test ConditionsMIN.TYP.MAX.Unit Circuit Current I CC No signal−36.045.0mAPower Gain G P f = 0.9 GHzf = 1.5 GHz 191821212424dBNoise Figure NF f = 0.9 GHzf = 1.5 GHz −−6.06.07.57.5dBUpper Limit OperatingFrequencyf u 3 dB down below from gain at f = 0.1 GHz 1.8 2.2−GHzIsolation ISL f = 0.9 GHzf = 1.5 GHz 25253030−−dBInput Return Loss RL in f = 0.9 GHzf = 1.5 GHz 10101414−−dBOutput Return Loss RL out f = 0.9 GHzf = 1.5 GHz 6.55.59.08.5−−dB1 dB Gain Compres-Sion Output Level P O (1 dB) f = 0.9 GHzf = 1.5 GHz+9.0+7.0+11.5+9.5−−dBmSaturated Output Power Level P O (sat) f = 0.9 GHzf = 1.5 GHz−−+12.5+11−−dBmData Sheet P12710EJ2V0DS006STANDARD CHARACTERISTICS FOR REFERENCE (T A = +25 °C, V CC = V out = 3.0 V, Z L = Z S = 50 Ω)µPC2762TB, µPC2763TBReferenceµPC2762TBµPC2763TB Parameter Symbol Test ConditionsMIN.TYP.MAX.MIN.TYP.MAX.UnitSaturated Output Power Level P O (sat) f = 0.9 GHzf = 1.9 GHz−−+9.0+8.5−−−−+11.0+8.0−−dBmAdjacent channel power P adj f = 0.9 GHzπ/4 QPSK wave NoteP O = +4 dBm∆f = ±50 kHz∆f = ±100 kHz−−−64−64−−−−−61−62−−dBcThird order intermodulation IM3 2 sine wave input.Output of each tonef1 = 0.900 GHzf2 = 0.902 GHz−−16−−−27−dBcdistortion P O(each) = +4 dBm f1 = 1.900 GHzf2 = 1.902 GHz−−10−−−14−dBc µPC2771TBReferenceµPC2771TB Parameter Symbol Test ConditionsMIN.TYP.MAX.UnitAdjacent channel power 1P adj1 f = 0.9 GHzπ/4 QPSK wave NoteP O = +7 dBm∆f = ±50 kHz∆f = ±100 kHz−−−61−72−−dBcAdjacent channel power 2P adj2 f = 1.5 GHzπ/4 QPSK wave NoteP O = +7 dBm∆f = ±50 kHz∆f = ±100 kHz−−−59−71−−dBcThird order intermodulation IM3 2 sine wave input.Output of each tonef1 = 0.900 GHzf2 = 0.902 GHz−−18−dBcdistortion P O (each) = +7 dBm f1 = 1.500 GHzf2 = 1.502 GHz−−12−dBc Noteπ/4 DQPSK modulated wave input, data rate 42 kbps, Filter roll off α = 0.5, PN 9Data Sheet P12710EJ2V0DS007TEST CIRCUITINOUTCOMPONENTS OF TEST CIRCUIT EXAMPLE OF ACTUAL APPLICATION COMPONENTSFOR MEASURING ELECTRICALCHARACTERISTICSType Value Type Value Operating Frequency C1, C2Bias Tee 1 000 pF C1 to C3Chip capacitor 1 000 pF100 MHz or higher C3Capacitor 1 000 pF L Chip inductor100 nH100 MHz or higherL Bias Tee 1 000 nH10 nH 2.0 GHz or higherINDUCTOR FOR THE OUTPUT PINThe internal output transistor of this IC consumes 20 mA, to output medium power. To supply current for output transistor, connect an inductor between the Vcc pin (pin 6) and output pin (pin 4). Select large value inductance, as listed above.The inductor has both DC and AC effects. In terms of DC, the inductor biases the output transistor with minimum voltage drop to output enable high level. In terms of AC, the inductor make output-port-impedance higher to get enough gain. In this case, large inductance and Q is suitable.For above reason, select an inductance of 100 Ω or over impedance in the operating frequency. The gain is a peak in the operating frequency band, and suppressed at lower frequencies.The recommendable inductance can be chosen from example of actual application components list as shown above.CAPACITORS FOR THE V CC, INPUT, AND OUTPUT PINSCapacitors of 1 000 pF are recommendable as the bypass capacitor for the Vcc pin and the coupling capacitors for the input and output pins.The bypass capacitor connected to the Vcc pin is used to minimize ground impedance of Vcc pin. So, stable bias can be supplied against Vcc fluctuation.The coupling capacitors, connected to the input and output pins, are used to cut the DC and minimize RF serial impedance. Their capacitance are therefore selected as lower impedance against a 50 Ω load. The capacitors thus perform as high pass filters, suppressing low frequencies to DC.To obtain a flat gain from 100 MHz upwards, 1 000 pF capacitors are used in the test circuit. In the case of under 10 MHz operation, increase the value of coupling capacitor such as 10 000 pF. Because the coupling capacitors are determined by equation, C = 1/(2πRfc).8Data Sheet P12710EJ2V0DS00Data Sheet P12710EJ2V0DS009ILLUSTRATION OF THE TEST CIRCUIT ASSEMBLED ON EVALUATION BOARDC1Z321456→Top ViewMounting direction(Marking is an example for PC2762TB)Notes1.2.3.4.30 × 30 × 0.4 mm double sided copper clad polyimide board.Back side: GND pattern Solder plated on pattern : Through holesFor more information on the use of this IC, refer to the following application note: USAGE AND APPLICATION OF SILICON MEDIUM-POWER HIGH-FREQUENCY AMPLIFIER MMIC (P12152E).COMPONENT LISTValueC 1 000 pF LExample: 10 nHData Sheet P12710EJ2V0DS0010TYPICAL CHARACTERISTICS (Unless otherwise specified, T A = +25 °C)− µPC2762TB −CIRCUIT CURRENT vs. SUPPLY VOLTAGECIRCUIT CURRENT vs. OPERATING AMBIENT TEMPERATUREC i r c u i t C u r r e n t I C C (m A )Supply Voltage V CC (V)Operating Ambient Temperature T A (°C)Frequency f (GHz)ISOLATION vs. FREQUENCYINPUT RETURN LOSS, OUTPUT RETURN LOSS vs. FREQUENCY I s o l a t i o n I S L (d B )Frequency f (GHz)Frequency f (GHz)Frequency f (GHz)–601020304050–40–200+20+40+60+80+100No signal V CC = 3.0 V NOISE FIGURE AND INSERTION POWER GAIN vs. FREQUENCYINSERTION POWER GAIN vs. FREQUENCY C i r c u i t C u r r e n t I C C (m A )I n s e r t i o n P o w e r G a i n G P (d B )No signal 010203040501234–40–30–200–10 1.0 3.00.10.3VCC = 3.0 VI n p u t R e t u r n L o s s R L i n (d B )O u t p u t R e t u r n L o s s R L o u t (d B )–40–30–201.0 3.0–100.30.1N o i s e F i g u r e N F (d B )1.03.00.30.180.110121416181.0 3.00.3− µPC2762TB −OUTPUT POWER vs. INPUT POWEROUTPUT POWER vs. INPUT POWERO u t p u t P o w e r P o u t (d B m )O u t p u t P o w e r P o u t (d B m )Input Power P in (dBm)Input Power P in (dBm)S a t u r a t e d O u t p u t P o w e r P O (s a t ) (d B m )Frequency f (GHz)–10–5+15+5+10–10–20–50+5+10+15–15–10–50+5OUTPUT POWER vs. INPUT POWEROUTPUT POWER vs. INPUT POWER O u t p u t P o w e r P o u t (d B m )–10–20–15+5–5+15+5+10–10–50Frequency f (GHz)+30.1+9+11+13+5+71.0 3.00.30.3 1.0 3.00.1− µPC2762TB −THIRD ORDER INTERMODULATION DISTORTION vs. OUTPUT POWER OF EACH TONETHIRD ORDER INTERMODULATION DISTORTION vs. OUTPUT POWER OF EACH TONET h i r d O r d e r I n t e r m o d u l a t i o n D i s t o r t i o n I M 3 (d B c )Output Power of Each Tone P O (each) (dBm)Output Power of Each Tone P O (each) (dBm)0–15–10–20–30–50–60–10–50+5+10T h i r d O r d e r I n t e r m o d u l a t i o n D i s t o r t i o n I M 3 (d B c )–400–15–10–20–30–50–60–10–50+5+10–40S-PARAMETER (T A = +25 °C, V CC = V out = 3.0 V)−µPC2762TB −S11-FREQUENCYS22-FREQUENCYTYPICAL S-PARAMETER VALUES (T A = +25 °C)µPC2762TBV CC = V out = 3.0 V, I CC = 29 mAFREQUENCY S11S21S12S22K MHz MAG.ANG.MAG.ANG.MAG.ANG.MAG.ANG.100.00000.338−1.3 4.560−3.40.039 1.00.310−5.5 2.23 200.00000.346−2.0 4.581−7.60.039 2.70.311−9.5 2.20 300.00000.348−1.2 4.616−11.30.039 6.80.302−12.3 2.20 400.00000.340−1.9 4.661−15.80.0408.10.296−16.2 2.18 500.00000.329−3.1 4.689−19.50.04011.60.290−20.2 2.20 600.00000.324−6.2 4.726−23.60.04113.70.292−24.1 2.12 700.00000.341−8.1 4.844−27.40.04215.80.291−26.2 2.01 800.00000.359−7.6 4.927−31.50.04318.10.292−28.3 1.90 900.00000.378−6.5 5.057−35.80.04419.30.284−30.9 1.77 1000.00000.375−5.1 5.179−41.00.04520.30.280−35.3 1.72 1100.00000.363−5.2 5.306−45.90.04722.10.285−40.0 1.64 1200.00000.353−6.7 5.400−51.00.04723.70.288−43.4 1.62 1300.00000.357−8.8 5.567−56.50.04826.10.288−45.7 1.54 1400.00000.377−11.7 5.706−61.70.04924.50.285−47.9 1.44 1500.00000.402−12.7 5.820−68.00.05226.70.282−52.8 1.32 1600.00000.414−13.2 5.987−73.70.05226.80.285−58.1 1.27 1700.00000.426−13.6 6.081−80.10.05529.00.288−62.0 1.18 1800.00000.434−16.1 6.182−86.70.05628.20.291−66.1 1.14 1900.00000.448−19.0 6.229−93.20.05728.50.286−70.4 1.09 2000.00000.463−21.7 6.328−99.70.05728.00.282−76.2 1.07 2100.00000.483−23.9 6.382−106.70.05828.50.282−81.5 1.01 2200.00000.492−25.8 6.431−113.80.05829.00.282−86.90.99 2300.00000.492−29.7 6.424−121.20.06030.10.278−91.70.99 2400.00000.486−34.6 6.329−128.80.06030.20.268−98.4 1.01 2500.00000.489−40.4 6.146−136.10.06231.10.260−104.5 1.02 2600.00000.500−44.6 5.997−143.10.06132.10.251−111.3 1.05 2700.00000.511−48.5 5.822−149.90.06431.40.248−116.7 1.03 2800.00000.511−50.4 5.693−157.00.06634.00.237−121.5 1.04 2900.00000.494−52.9 5.553−163.00.06533.80.222−128.3 1.11 3000.00000.465−55.9 5.334−169.50.06535.50.203−134.5 1.20 3100.00000.441−60.6 5.157−175.50.06635.50.189−141.1 1.27TYPICAL CHARACTERISTICS (Unless otherwise specified, T A = +25 °C)− µPC2763TB −CIRCUIT CURRENT vs. SUPPLY VOLTAGE CIRCUIT CURRENT vs. OPERATING AMBIENT TEMPERATUREFrequency f (GHz)Frequency f (GHz)N o i s e F i g u r e N F (d B )50.10.10.3 1.070.3 1.0 3.064− µPC2763TB −OUTPUT POWER vs. INPUT POWEROUTPUT POWER vs. INPUT POWERO u t p u t P o w e r P o u t (d B m )O u t p u t P o w e r P o u t (d B m )Input Power P in (dBm)Input Power P in (dBm)Input Power P in (dBm)SATURATED OUTPUT POWER vs.FREQUENCYSATURATED OUTPUT POWER vs.FREQUENCYS a t u r a t e d O u t p u t P o w e r P O (s a t ) (d B m )Frequency f (GHz)Input Power P in (dBm)OUTPUT POWER vs. INPUT POWEROUTPUT POWER vs. INPUT POWER O u t p u t P o w e r P o u t (d B m )Frequency f (GHz)–5+30.10+5+10+15+9+11+13+15–10–25+5+10+15+5+10+15–20–15–10–50–5+5+71.0 3.00.11.0 3.0–25–20–15–10–50–25–20–15–10–50–25–20–15–10–500.30.3–100–5–10− µPC2763TB −T h i r d O r d e r I n t e r m o d u l a t i o n D i s t o r t i o n I M 3 (d B c )Output Power of Each Tone P O (each) (dBm)Output Power of Each Tone P O (each) (dBm)T h i r d O r d e r I n t e r m o d u l a t i o n D i s t o r t i o n I M 3 (d B c )THIRD ORDER INTERMODULATION DISTORTION vs.OUTPUT POWER OF EACH TONETHIRD ORDER INTERMODULATION DISTORTION vs.OUTPUT POWER OF EACH TONE0–15–10–20–50–60–10–50+5+100–20–30–50–60–10–30–40–40–15–10–50+5+10S-PARAMETER (T A = +25 °C, V CC = V out = 3.0 V)−µPC2763TB −S11-FREQUENCYS22-FREQUENCY3.0 G0.1 G2.0 G1.0 GTYPICAL S-PARAMETER VALUES (T A = +25 °C)µPC2763TBV CC = V out = 3.0 V, I CC = 28 mAFREQUENCY S11S21S12S22 K MHz MAG.ANG.MAG.ANG.MAG.ANG.MAG.ANG.100.00000.231−1.410.210−3.80.023 2.40.406−4.1 1.68 200.00000.242−0.210.305−8.50.0237.80.412−7.5 1.66 300.00000.250 2.710.464−12.90.0249.30.407−9.9 1.58 400.00000.245 2.810.655−18.20.02413.40.407−13.9 1.55 500.00000.242 2.010.863−22.80.02616.10.405−17.6 1.44 600.00000.241−2.211.093−28.10.02719.90.414−21.6 1.37 700.00000.263−5.311.544−33.20.02822.30.419−24.6 1.25 800.00000.291−5.611.843−39.00.02922.50.424−27.7 1.16 900.00000.316−5.112.291−45.10.02923.90.424−31.9 1.09 1000.00000.322−4.012.676−52.40.03025.60.425−37.1 1.02 1100.00000.318−5.413.066−59.80.03124.10.438−42.50.96 1200.00000.309−9.013.311−67.30.03127.00.442−47.80.96 1300.00000.322−14.213.661−75.80.03328.80.441−51.20.90 1400.00000.344−20.613.845−83.90.03328.50.434−56.00.87 1500.00000.371−23.713.824−93.00.03530.10.435−62.20.82 1600.00000.380−27.513.890−101.50.03528.10.439−68.90.80 1700.00000.388−30.613.634−110.50.03629.20.439−74.60.78 1800.00000.378−36.413.236−119.60.03529.90.428−81.30.84 1900.00000.378−42.112.724−127.90.03530.90.411−87.00.89 2000.00000.375−46.612.290−136.10.03532.90.393−93.40.94 2100.00000.369−50.511.707−144.00.03533.00.385−99.60.99 2200.00000.351−53.811.130−151.70.03635.70.373−104.9 1.06 2300.00000.331−59.810.524−159.10.03636.80.359−110.3 1.13 2400.00000.306−66.49.824−165.90.03438.70.336−117.5 1.31 2500.00000.300−73.19.152−172.30.03540.10.321−123.3 1.41 2600.00000.294−75.88.583−178.20.03443.80.306−129.4 1.55 2700.00000.290−77.18.029176.20.03546.30.299−133.9 1.58 2800.00000.270−77.77.610170.60.03747.70.288−138.6 1.63 2900.00000.248−78.77.240166.10.03951.10.270−143.6 1.67 3000.00000.219−82.3 6.827161.20.03953.60.253−150.1 1.79 3100.00000.198−88.7 6.516156.90.04055.10.244−156.2 1.88TYPICAL CHARACTERISTICS (Unless otherwise specified, T A = +25 °C)− µPC2771TB −CIRCUIT CURRENT vs. OPERATING AMBIENT TEMPERATUREC i r c u i t C u r r e n t I C C (m A )I s o l a t i o n I S L (d B )Frequency f (GHz)Frequency f (GHz)CIRCUIT CURRENT vs. SUPPLY VOLTAGE2422201816I n s e r t i o n P o w e r G a i n G P (d B )502000.10.10.3 1.0 3.01.0 3.0103040140.312108656743N o i s e F i g u r e N F (d B )–10–20–30–40Data Sheet P12710EJ2V0DS0021− µPC2771TB −OUTPUT POWER vs. INPUT POWER O u t p u t P o w e r P o u t (d B m )O u t p u t P o w e r P o u t (d B m )O u t p u t P o w e r P o u t (d B m )Input Power P in (dBm)Input Power P in (dBm)OUTPUT POWER vs. INPUT POWER–5–10+15+15–5+5+10+15+5+10+10+5–5–10–20–15–100–25–5–20–15–10–25–5Data Sheet P12710EJ2V0DS0022− µPC2771TB −S a t u r a t e d O u t p u t P o w e r P O (s a t ) (d B m )T h i r d O r d e r I n t e r m o d u l a t i o n D i s t o r t i o n I M 3 (d B c )Output Power of Each Tone P O (each) (dBm)Output Power of Each Tone P O (each) (dBm)SATURATED OUTPUT POWER vs.FREQUENCYSATURATED OUTPUT POWER vs.FREQUENCY+17+9–60–30–5+10+7+13+15–50–40–20–10+11+500–10–15+10–50–10+5–15+5S-PARAMETER (T A = +25 °C, V CC = V out = 3.0 V)−µPC2771TB −S11-FREQUENCYS22-FREQUENCYData Sheet P12710EJ2V0DS0023TYPICAL S-PARAMETER VALUES (T A = +25 °C)µPC2771TBV CC = V out = 3.0 V, I CC = 35 mAFREQUENCY S11S21S12S22 K MHz MAG.ANG.MAG.ANG.MAG.ANG.MAG.ANG.100.00000.04519.710.570−4.70.0280.80.327−6.2 1.65 200.00000.05737.010.638−9.50.028 5.00.325−11.5 1.63 300.00000.07541.310.775−14.10.0298.60.323−16.2 1.58 400.00000.09043.311.004−19.40.03011.10.326−20.9 1.49 500.00000.10542.211.275−24.40.03014.90.331−26.4 1.45 600.00000.11840.211.586−30.00.03115.80.342−32.0 1.37 700.00000.13834.912.041−35.90.03119.80.350−37.3 1.29 800.00000.16332.512.367−42.10.03220.10.359−42.8 1.20 900.00000.18629.412.844−48.80.03223.20.361−49.4 1.15 1000.00000.20226.313.300−56.60.03223.90.371−56.1 1.11 1100.00000.21921.713.771−64.60.03324.90.389−62.5 1.03 1200.00000.23315.414.082−73.50.03326.60.400−69.30.99 1300.00000.2528.414.365−83.20.03628.80.405−75.40.92 1400.00000.267−0.114.336−92.60.03630.00.402−83.60.91 1500.00000.285−6.814.142−102.40.03632.00.406−91.60.90 1600.00000.293−13.913.929−112.00.03731.60.413−99.30.89 1700.00000.304−20.913.428−121.60.03932.50.414−105.80.88 1800.00000.290−28.112.722−131.00.03834.70.401−113.70.96 1900.00000.285−35.311.966−139.60.03836.10.387−120.8 1.03 2000.00000.273−41.811.232−147.50.03837.40.378−127.6 1.09 2100.00000.267−47.410.500−154.80.03939.10.366−133.1 1.14 2200.00000.254−51.69.815−161.70.04041.40.356−138.0 1.20 2300.00000.237−57.19.168−168.00.04143.70.342−142.8 1.28 2400.00000.221−61.18.570−173.70.04148.30.325−148.3 1.37 2500.00000.212−68.87.967−179.70.04248.30.322−152.6 1.44 2600.00000.208−72.27.507174.90.04350.80.314−156.7 1.49 2700.00000.202−74.17.004170.00.04553.70.309−160.1 1.53 2800.00000.190−76.3 6.667164.70.04754.20.303−164.0 1.56 2900.00000.178−76.7 6.336160.70.05157.70.292−167.8 1.55 3000.00000.154−82.3 6.003155.60.05156.50.287−172.8 1.62 3100.00000.147−88.0 5.772151.30.05459.30.279−176.4 1.6124Data Sheet P12710EJ2V0DS00Data Sheet P12710EJ2V0DS0025PACKAGE DIMENSIONS6 pin super minimold (Unit: mm).+0.1+0.1NOTES ON CORRECT USE(1)Observe precautions for handling because of electro-static sensitive devices.(2)Form a ground pattern as wide as possible to minimize ground impedance (to prevent undesired oscillation).All the ground pins must be connected together with wide ground pattern to decrease impedance difference.(3)The bypass capacitor should be attached to the V CC pin.(4)The inductor must be attached between V CC and output pins. The inductance value should be determined inaccordance with desired frequency.(5)The DC cut capacitor must be attached to input pin.RECOMMENDED SOLDERING CONDITIONSThis product should be soldered under the following recommended conditions. For soldering methods and conditions other than those recommended below, contact your NEC sales representative.Soldering Method Soldering Conditions Recommended Condition SymbolIR35-00-3Infrared Reflow Package peak temperature: 235 °C or belowTime: 30 seconds or less (at 210 °C)Count: 3, Exposure limit: None NoteVP15-00-3VPS Package peak temperature: 215 °C or belowTime: 40 seconds or less (at 200 °C)Count: 3, Exposure limit: None NoteWave Soldering Soldering bath temperature: 260 °C or belowWS60-00-1Time: 10 seconds or lessCount: 1, Exposure limit: None Note–Partial Heating Pin temperature: 300 °CTime: 3 seconds or less (per side of device)Exposure limit: None NoteNote After opening the dry pack, keep it in a place below 25 °C and 65 % RH for the allowable storage period.Caution Do not use different soldering methods together (except for partial heating).For details of recommended soldering conditions for surface mounting, refer to information document SEMICONDUCTOR DEVICE MOUNTING TECHNOLOGY MANUAL (C10535E).26Data Sheet P12710EJ2V0DS00[MEMO]Data Sheet P12710EJ2V0DS0027OBSERVE PRECAUTIONSFOR HANDLINGELECTROSTATICSENSITIVEDEVICESNESAT (NEC Silicon Advanced Technology) is a trademark of NEC Corporation.• The information in this document is subject to change without notice. Before using this document, please confirm that this is the latest version.• No part of this document may be copied or reproduced in any form or by any means without the prior written consent of NEC Corporation. NEC Corporation assumes no responsibility for any errors which may appear in this document.• NEC Corporation does not assume any liability for infringement of patents, copyrights or other intellectual propertyrights of third parties by or arising from use of a device described herein or any other liability arising from useof such device. No license, either express, implied or otherwise, is granted under any patents, copyrights or otherintellectual property rights of NEC Corporation or others.• Descriptions of circuits, software, and other related information in this document are provided for illustrative purposes in semiconductor product operation and application examples. The incorporation of these circuits,software, and information in the design of the customer's equipment shall be done under the full responsibilityof the customer. NEC Corporation assumes no responsibility for any losses incurred by the customer or third parties arising from the use of these circuits, software, and information.• While NEC Corporation has been making continuous effort to enhance the reliability of its semiconductor devices,the possibility of defects cannot be eliminated entirely. To minimize risks of damage or injury to persons orproperty arising from a defect in an NEC semiconductor device, customers must incorporate sufficient safety measures in its design, such as redundancy, fire-containment, and anti-failure features.• NEC devices are classified into the following three quality grades:"Standard", "Special", and "Specific". The Specific quality grade applies only to devices developed based on acustomer designated "quality assurance program" for a specific application. The recommended applications ofa device depend on its quality grade, as indicated below. Customers must check the quality grade of each devicebefore using it in a particular application.Standard: Computers, office equipment, communications equipment, test and measurement equipment,audio and visual equipment, home electronic appliances, machine tools, personal electronic equipment and industrial robotsSpecial: Transportation equipment (automobiles, trains, ships, etc.), traffic control systems, anti-disastersystems, anti-crime systems, safety equipment and medical equipment (not specifically designed for life support)Specific: Aircraft, aerospace equipment, submersible repeaters, nuclear reactor control systems, lifesupport systems or medical equipment for life support, etc.The quality grade of NEC devices is "Standard" unless otherwise specified in NEC's Data Sheets or Data Books. If customers intend to use NEC devices for applications other than those specified for Standard quality grade, they should contact an NEC sales representative in advance.M7 98. 8。
NCP551SN27T1G、NCP551SN28T1G和NCV551SN36T1G:电路板组件工业有

NCP551SN27T1G NCP551SN28T1G NCV551SN36T1GNCP551, NCV551Voltage Regulator - CMOS,Low Iq, Low-Dropout150 mAThe NCP551 series of fixed output low dropout linear regulators are designed for handheld communication equipment and portable battery powered applications which require low quiescent. The NCP551series features an ultra −low quiescent current of 4.0 m A. Each device contains a voltage reference unit, an error amplifier, a PMOS power transistor, resistors for setting output voltage, current limit, and temperature limit protection circuits.The NCP551 has been designed to be used with low cost ceramic capacitors and requires a minimum output capacitor of 0.1 m F. The device is housed in the TSOP −5 surface mount package. Standard voltage versions are 1.4, 1.5, 1.8, 2.5, 2.7, 2.8, 2.9, 3.0, 3.1, 3.2, 3.3,3.6, 3.8 and 5.0 V . Other voltages are available in 100 mV steps.Features•Low Quiescent Current of 4.0 m A Typical •Maximum Operating V oltage of 12 V •Low Output V oltage Option•High Accuracy Output V oltage of 2.0%•Industrial Temperature Range of −40°C to 85°C (NCV551, T A = −40°C to +125°C)•NCV Prefix for Automotive and Other Applications Requiring Unique Site and Control Change Requirements; AEC −Q100Qualified and PPAP Capable•These Devices are Pb −Free and are RoHS CompliantTypical Applications•Battery Powered Instruments •Hand −Held Instruments •Camcorders and CamerasFigure 1. Representative Block DiagramV inV outEnable OFFON See detailed ordering and shipping information in the package dimensions section on page 11 of this data sheet.ORDERING INFORMATIONTSOP −5(SOT23−5, SC59−5)SN SUFFIX CASE 483PIN CONNECTIONS AND MARKING DIAGRAM13N/CVin 2GND Enable4V out5(Top View)xxxAYW G G xxx = Specific Device Code A = Assembly Location Y = YearW = Work Week G = Pb −Free Package(Note: Microdot may be in either location)PIN FUNCTION DESCRIPTIONPin No.Pin Name Description1V in Positive power supply input voltage.2GND Power supply ground.3Enable This input is used to place the device into low−power standby. When this input is pulled low, thedevice is disabled. If this function is not used, Enable should be connected to V in.4N/C No Internal Connection.5V out Regulated output voltage.MAXIMUM RATINGSRating Symbol Value Unit Input Voltage V in0 to 12V Enable Voltage V EN−0.3 to V in+0.3V Output Voltage V out−0.3 to V in+0.3V Power Dissipation P D Internally Limited W Operating Junction Temperature T J+150°COperating Ambient Temperature NCP551NCV551T A−40 to +85−40 to +125°CStorage Temperature T stg−55 to +150°C Stresses exceeding those listed in the Maximum Ratings table may damage the device. If any of these limits are exceeded, device functionalityshould not be assumed, damage may occur and reliability may be affected.1.This device series contains ESD protection and exceeds the following tests:Human Body Model 2000 V per MIL−STD−883, Method 3015Machine Model Method 200 VCharge Device Model (CDM) tested C3B per EIA/JESD22−C101.tchup capability (85°C) "100 mA DC with trigger voltage.THERMAL CHARACTERISTICSRating Symbol Test Conditions Typical Value Unit Junction−to−Ambient R q JA 1 oz Copper Thickness, 100 mm2250°C/W PSIJ−Lead 2Y J−L2 1 oz Copper Thickness, 100 mm268°C/W NOTE:Single component mounted on an 80 x 80 x 1.5 mm FR4 PCB with stated copper head spreading area. Using the following boundary conditions as stated in EIA/JESD 51−1, 2, 3, 7, 12.ELECTRICAL CHARACTERISTICS(V in = V out(nom.) + 1.0 V, V EN = V in, C in = 1.0 m F, C out = 1.0 m F, T A = 25°C, unless otherwise noted.)Characteristic Symbol Min Typ Max UnitOutput Voltage (T A = 25°C, I out = 10 mA) 1.4 V1.5 V1.8 V2.5 V2.7 V2.8 V2.9 V3.0 V3.1 V3.2 V3.3 V3.6 V3.8 V5.0 V V out1.3581.4551.7462.4252.6462.7442.8422.9403.0383.1363.2343.5283.7244.901.41.51.82.52.72.82.93.03.13.23.33.63.85.01.4421.5451.8542.5752.7542.8562.9583.0603.1623.2643.3663.6723.8765.10VOutput Voltage (T A = T low to T high, I out = 10 mA) 1.4 V1.5 V1.8 V2.5 V2.7 V2.8 V2.9 V3.0 V3.1 V3.2 V3.3 V3.6 V3.8 V5.0 V V out1.3441.4401.7282.4002.6192.7162.8132.9103.0073.1043.2013.4923.6864.8501.41.51.82.52.72.82.93.03.13.23.33.63.85.01.4561.5601.8722.6002.7812.8842.9873.0903.1933.2963.3993.7083.9145.150VLine Regulation (V in = V out + 1.0 V to 12 V, I out = 10 mA)Reg line−1030mV Load Regulation (I out = 10 mA to 150 mA, V in = V out + 2.0 V)Reg load−4065mVOutput Current (V out = (V out at I out = 100 mA) −3%)1.4 V−2.0 V (V in = 4.0 V)2.1 V−3.0 V (V in = 5.0 V)3.1 V−4.0 V (V in = 6.0 V)4.1 V−5.0 V (V in = 8.0 V)I o(nom.)150150150150−−−−−−−−mADropout Voltage (I out = 10 mA, Measured at V out−3.0%)1.4 V1.5 V, 1.8 V,2.5 V2.7 V, 2.8 V, 2.9 V,3.0 V, 3.1 V, 3.2 V, 3.3 V, 3.6 V, 3.8 V, 5.0 V V in−V out−−−17013040250220150mVQuiescent Current(Enable Input = 0 V)(Enable Input = V in, I out = 1.0 mA to I o(nom.))1.4 V−2.0 V options, V in = 4.0 V2.1 V−3.0 V options, V in = 5.0 V3.1 V−4.0 V options, V in = 6.0 V4.1 V−5.0 V options, V in = 8.0 V I Q−−0.14.01.08.0m AOutput Voltage Temperature Coefficient T c−"100−ppm/°CEnable Input Threshold Voltage(Voltage Increasing, Output Turns On, Logic High) (Voltage Decreasing, Output Turns Off, Logic Low)V th(en)1.3−−−−0.3VELECTRICAL CHARACTERISTICS (continued)(V in = V out(nom.) + 1.0 V, V EN = V in , C in = 1.0 m F, C out = 1.0 m F, T A = 25°C, unless otherwise noted.)Output Short Circuit Current (V out = 0 V)1.4 V −2.0 V (V in = 4.0 V)2.1 V −3.0 V (V in = 5.0 V)3.1 V −4.0 V (V in = 6.0 V)4.1 V −5.0 V (V in = 8.0 V)I out(max)160160160160350350350350600600600600mA3.Maximum package power dissipation limits must be observed.PD +T J(max)*T A R q JA4.Low duty cycle pulse techniques are used during testing to maintain the junction temperature as close to ambient as possible.5.NCP551T low = −40°CT high = +85°C NCV551T low = −40°CT high = +125°C.DEFINITIONSLoad RegulationThe change in output voltage for a change in output current at a constant temperature.Dropout VoltageThe input/output differential at which the regulator output no longer maintains regulation against further reductions in input voltage. Measured when the output drops 3% below its nominal. The junction temperature, load current, and minimum input supply requirements affect the dropout level. Maximum Power DissipationThe maximum total dissipation for which the regulator will operate within its specifications.Quiescent CurrentThe quiescent current is the current which flows through the ground when the LDO operates without a load on its output: internal IC operation, bias, etc. When the LDO becomes loaded, this term is called the Ground current. It is actually the difference between the input current (measured through the LDO input pin) and the output current.Line RegulationThe change in output voltage for a change in input voltage. The measurement is made under conditions of low dissipation or by using pulse technique such that the average chip temperature is not significantly affected.Line Transient ResponseTypical over and undershoot response when input voltage is excited with a given slope.Thermal ProtectionInternal thermal shutdown circuitry is provided to protect the integrated circuit in the event that the maximum junction temperature is exceeded. When activated at typically 160°C, the regulator turns off. This feature is provided to prevent failures from accidental overheating.Maximum Package Power DissipationThe maximum power package dissipation is the power dissipation level at which the junction temperature reaches its maximum operating value, i.e. 125°C. Depending on the ambient power dissipation and thus the maximum available output current.3.25G R O U N D C U R R E N T (m A )3.05Figure 2. Ground Pin Current versusOutput Current 3.35I out , OUTPUT CURRENT (mA)3.33.13.23.15Figure 3. Ground Pin Current versusOutput Current3.35G R O U N D C U R R E N T (m A )3.153.45I out , OUTPUT CURRENT (mA)3.43.23.33.250.50Figure4. Ground Pin Current versusInput Voltage V in , INPUT VOLTAGE (VOLTS)Figure 5. Ground Pin Current versusInput VoltageG R OU N D P I N C U R R E N T (m A )11.522.533.540.50V in , INPUT VOLTAGE (VOLTS)G R OU N D P I N C U R R E N T (m A )11.522.533.5440004−200200−60064200TIME (m s)Figure 6. Line Transient Response Figure 7. Line Transient Response8TIME (m s)−20004006−400−400O U T P U T V O L T A G E D E V I A T I O N (m V )V i n , I N P U T V O L T A G E (V )O U T P U T V O L T A G E D E V I A T I O N (m V )V i n , I N P U T V O L T A G E (V )4−−4200TIME (m s)Figure 8. Line Transient Response Figure 9. Line Transient ResponseTIME (m s)−20004006−−400O U T P U T V O L T A G E D E V I A T I O N (m V )V i n , I N P U T V O L T A G E (V )O U T P U T V O L T A G E D E V I A T I O N (m V )V i n , I N P U T V O L T A G E (V )−600−−4200Figure 10. Line Transient Response Figure 11. Line Transient ResponseTIME (m s)−20004006−−400O U T P U T V O L T A G E D E V I A T I O N (m V )V i n , I N P U T V O L T A G E (V )O U T P U T V O L T A G E D E V I A T I O N (m V )V i n , I N P U T V O L T A G E (V )−600600800TIME (m s)150O U T P U T V O L T A G E D E V I A T I O N (m V )−1000TIME (ms)Figure 12. Load Transient Response ON Figure 13. Load Transient Response OFFTIME (ms)−50000I o u t , O U T P U T C U R R E N T (m A )−O U T P U T V O L T A G E D E V I A T I O N (m V )I o u t , O U T P U T C U R R E N T (m A )Figure 14. Load Transient Response OFF TIME (ms)Figure 15. Load Transient Response ONTIME (ms)150−5005000−−01000O U T P U T V O L T A G E D E V I A T I O N (m V )I o u t , O U T P U T C U R R E N T (m A )O U T P U T V O L T A G E D E V I A T I O N (m V )I o u t , O U T P U T C U R R E N T (m A )12Figure 16. Turn −On Response 3TIME (m s)0132V o u t , O U T P U T V O L T A G E (V )E N A B L E V O L T A G E (V )Figure 17. Turn−On ResponseTIME (m s)V o u t , O U T P U T V O L T A G E (V )E N A B L E V O L T A G E(V )Figure 18. Output Voltage versus Input Voltage Figure 19. Output Voltage versus Input Voltage2V o u t , O U T P U T V O L T A G E (V O L T S )3V in , INPUT VOLTAGE (VOLTS)2.50.51.51V o u t , O U T P U T V O L T A G E (V O L T S )V in , INPUT VOLTAGE (VOLTS)APPLICATIONS INFORMATIONA typical application circuit for the NCP551 series is shown in Figure 20.Input Decoupling (C1)A 0.1 m F capacitor either ceramic or tantalum is recommended and should be connected close to the NCP551package. Higher values and lower ESR will improve the overall line transient response.Output Decoupling (C2)The NCP551 is a stable Regulator and does not require any specific Equivalent Series Resistance (ESR) or a minimum output current. Capacitors exhibiting ESRs ranging from a few m W up to 3.0 W can thus safely be used.The minimum decoupling value is 0.1 m F and can be augmented to fulfill stringent load transient requirements.The regulator accepts ceramic chip capacitors as well as tantalum devices. Larger values improve noise rejection and load regulation transient response.Enable OperationThe enable pin will turn on or off the regulator. These limits of threshold are covered in the electrical specification section of this data sheet. If the enable is not used then the pin should be connected to V in .HintsPlease be sure the V in and GND lines are sufficiently wide.When the impedance of these lines is high, there is a chance to pick up noise or cause the regulator to malfunction.Set external components, especially the output capacitor,as close as possible to the circuit, and make leads as short as possible.ThermalAs power across the NCP551 increases, it might become necessary to provide some thermal relief. The maximum power dissipation supported by the device is dependent upon board design and layout. Mounting pad configuration on the PCB, the board material, and also the ambient temperature effect the rate of temperature rise for the part.This is stating that when the NCP551 has good thermal conductivity through the PCB, the junction temperature will be relatively low with high power dissipation applications.The maximum dissipation the package can handle is given by:PD +T J(max)*T AR q JAIf junction temperature is not allowed above the maximum 125°C, then the NCP551 can dissipate up to 400 mW @ 25°C.The power dissipated by the NCP551 can be calculated from the following equation:P tot +ƪV in *I gnd (I out )ƫ)[V in *V out ]*I outorV inMAX +P tot)V out *I outI GND )I outIf a 150 mA output current is needed then the ground current from the data sheet is 4.0 m A. For an NCP551SN30T1 (3.0 V), the maximum input voltage will then be 5.6 V .Battery or Unregulated VoltageFigure 20. Typical Application CircuitOFFONm FFigure 21. Current Boost RegulatorFigure 22. Current Boost Regulator withShort Circuit LimitFigure 23. Delayed Turn −onFigure 24. Input Voltages Greater than 12 VThe NCP551 series can be current boosted with a PNP transist-or. Resistor R in conjunction with V BE of the PNP determines when the pass transistor begins conducting; this circuit is not short circuit proof. Input/Output differential voltage minimum is increased by V BE of the pass resistor.Short circuit current limit is essentially set by the V BE of Q2 and R1. I SC = ((V BEQ2 − ib * R2) / R1) + I O(max) RegulatorIf a delayed turn −on is needed during power up of several volt-ages then the above schematic can be used. Resistor R, and capacitor C, will delay the turn −on of the bottom regulator.A regulated output can be achieved with input voltages that exceed the 12 V maximum rating of the NCP551 series with the addition of a simple pre −regulator circuit. Care must be taken to prevent Q1 from overheating when the regulated output (V out ) is shorted to GND .ORDERING INFORMATIONDeviceNominalOutput Voltage Marking Package Shipping†NCP551SN15T1G 1.5LAO TSOP−5(Pb−Free)3000 / Tape & Reel NCP551SN18T1G 1.8LAP TSOP−5(Pb−Free)3000 / Tape & Reel NCP551SN25T1G 2.5LAQ TSOP−5(Pb−Free)3000 / Tape & Reel NCP551SN27T1G 2.7LAR TSOP−5(Pb−Free)3000 / Tape & Reel NCP551SN28T1G 2.8LAS TSOP−5(Pb−Free)3000 / Tape & ReelNCP551SN29T1G 2.9LJL TSOP−5(Pb−Free)3000 / Tape & ReelNCP551SN30T1G 3.0LAT TSOP−5(Pb−Free)3000 / Tape & ReelNCP551SN31T1G 3.1LJM TSOP−5(Pb−Free)3000 / Tape & ReelNCP551SN32T1G 3.2LIV TSOP−5(Pb−Free)3000 / Tape & ReelNCP551SN33T1G 3.3LAU TSOP−5(Pb−Free)3000 / Tape & ReelNCP551SN50T1G 5.0LAV TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN14T1G* 1.4AAT TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN15T1G* 1.5LFZ TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN18T1G* 1.8LGA TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN25T1G* 2.5LGB TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN27T1G* 2.7LGC TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN28T1G* 2.8LGD TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN30T1G* 3.0LGE TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN31T1G* 3.1LJR TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN32T1G* 3.2LFR TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN33T1G* 3.3LGG TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN36T1G* 3.6AEJ TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN38T1G* 3.8AD5TSOP−5(Pb−Free)3000 / Tape & ReelNCV551SN50T1G* 5.0LGF TSOP−5(Pb−Free)3000 / Tape & ReelNOTE:Additional voltages in 100 mV steps are available upon request by contacting your ON Semiconductor representative.†For information on tape and reel specifications, including part orientation and tape sizes, please refer to our T ape and Reel Packaging Specific-ations Brochure, BRD8011/D.*NCV Prefix for Automotive and Other Applications Requiring Unique Site and Control Change Requirements; AEC−Q100 Qualified and PPAP Capable.PACKAGE DIMENSIONSTSOP −5SN SUFFIX CASE 483−02ISSUE KNOTES:1.DIMENSIONING AND TOLERANCING PER ASME Y14.5M, 1994.2.CONTROLLING DIMENSION: MILLIMETERS.3.MAXIMUM LEAD THICKNESS INCLUDES LEAD FINISH THICKNESS. MINIMUM LEAD THICKNESS IS THE MINIMUM THICKNESS OF BASE MATERIAL.4.DIMENSIONS A AND B DO NOT INCLUDE MOLD FLASH, PROTRUSIONS, OR GATE BURRS. MOLDFLASH, PROTRUSIONS, OR GATE BURRS SHALL NOT EXCEED 0.15 PER SIDE. DIMENSION A.5.OPTIONAL CONSTRUCTION: AN ADDITIONAL TRIMMED LEAD IS ALLOWED IN THIS LOCATION.TRIMMED LEAD NOT TO EXTEND MORE THAN 0.2FROM BODY .DIM MIN MAX MILLIMETERS A 3.00 BSC B 1.50 BSC C 0.90 1.10D 0.250.50G 0.95 BSC H 0.010.10J 0.100.26K 0.200.60M 0 10 S2.503.00__ǒmm inchesǓ*For additional information on our Pb −Free strategy and solderingdetails, please download the ON Semiconductor Soldering and Mounting Techniques Reference Manual, SOLDERRM/D.SOLDERING FOOTPRINT*2XDETAIL ZTOP VIEWON Semiconductor and the are registered trademarks of Semiconductor Components Industries, LLC (SCILLC) or its subsidiaries in the United States and/or other countries.SCILLC owns the rights to a number of patents, trademarks, copyrights, trade secrets, and other intellectual property. A listing of SCILLC’s product/patent coverage may be accessed at /site/pdf/Patent −Marking.pdf. SCILLC reserves the right to make changes without further notice to any products herein. SCILLC makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does SCILLC assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages. “Typical” parameters which may be provided in SCILLC data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. SCILLC does not convey any license under its patent rights nor the rights of others. SCILLC products are not designed, intended,or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of the SCILLC product could create a situation where personal injury or death may occur. Should Buyer purchase or use SCILLC products for any such unintended or unauthorized application, Buyer shall indemnify and hold SCILLC and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that SCILLC was negligent regarding the design or manufacture of the part. SCILLC is an Equal Opportunity/Affirmative Action Employer. This literature is subject to all applicable copyright laws and is not for resale in any manner.PUBLICATION ORDERING INFORMATIONNCP551SN27T1G NCP551SN28T1G NCV551SN36T1G。
UPC3241TB-E3-A;UPC3241TB-A;UPC3241TB-EVAL-A;中文规格书,Datasheet资料

MMIC
MEDIUM
OUTPUT
POWER
PO (sat) (dBm) + 9.0 (0.9 GHz) + 8.5 (1.9 GHz) + 11.0 (0.9 GHz) + 8.0 (1.9 GHz) + 12.5 (0.9 GHz) + 11.0 (1.5 GHz) + 9.5 (0.9 GHz) + 9.0 (1.9 GHz) + 9.0 (2.4 GHz) + 11.0 (0.9 GHz) + 10.5 (1.9 GHz) + 10.0 (2.4 GHz) + 12.5 (1.0 GHz) + 10 (2.2 GHz)
This device exhibits low noise figure and high power gain characteristics. This IC is manufactured using our UHS0 (Ultra High Speed Process) bipolar process.
Parameter Supply Voltage Total Circuit Current Power Dissipation Operating Ambient Temperature Storage Temperature Input Power Symbol VCC ICC PD TA Tstg Pin TA = +25°C Conditions TA = +25°C, pin 4 and 6 TA = +25°C, pin 4 and 6 TA = +85C Note Ratings 4.0 55 270 40 to +85 55 to +150 10 Unit V mA mW °C °C dBm
27938;中文规格书,Datasheet资料
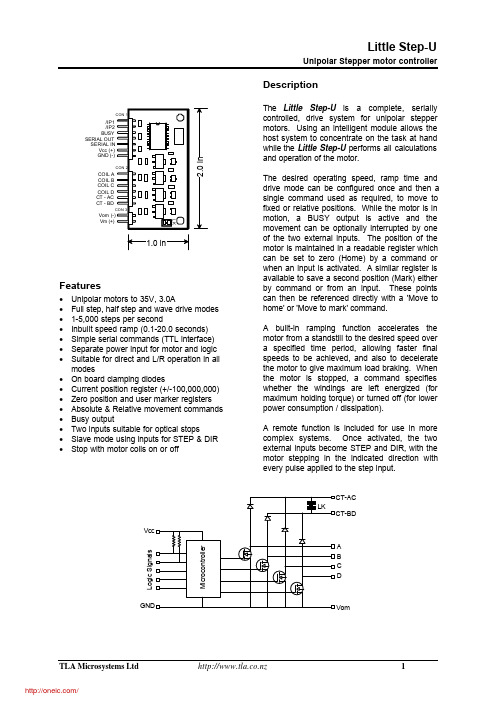
Little Step-UUnipolar Stepper motor controllerTLA Microsystems Ltd 1Features• Unipolar motors to 35V, 3.0A• Full step, half step and wave drive modes • 1-5,000 steps per second• Inbuilt speed ramp (0.1-20.0 seconds)• Simple serial commands (TTL interface)• Separate power input for motor and logic • Suitable for direct and L/R operation in all modes• On board clamping diodes• Current position register (+/-100,000,000)• Zero position and user marker registers • Absolute & Relative movement commands • Busy output• Two inputs suitable for optical stops• Slave mode using inputs for STEP & DIR •Stop with motor coils on or offDescriptionThe Little Step-U is a complete, serially controlled, drive system for unipolar stepper motors. Using an intelligent module allows the host system to concentrate on the task at hand while the Little Step-U performs all calculations and operation of the motor.The desired operating speed, ramp time and drive mode can be configured once and then a single command used as required, to move to fixed or relative positions. While the motor is in motion, a BUSY output is active and the movement can be optionally interrupted by one of the two external inputs. The position of the motor is maintained in a readable register which can be set to zero (Home) by a command or when an input is activated. A similar register is available to save a second position (Mark) either by command or from an input. These points can then be referenced directly with a 'Move to home' or 'Move to mark' command.A built-in ramping function accelerates the motor from a standstill to the desired speed over a specified time period, allowing faster final speeds to be achieved, and also to decelerate the motor to give maximum load braking. When the motor is stopped, a command specifies whether the windings are left energized (for maximum holding torque) or turned off (for lower power consumption / dissipation).A remote function is included for use in more complex systems. Once activated, the two external inputs become STEP and DIR, with the motor stepping in the indicated direction withevery pulse applied to the step input./IP1/IP2BUSYSERIAL OUT SERIAL INVcc (+)GND (-)COIL A COIL B COIL C COIL D CT - AC CT - BDVm (+)A B C D VomL o g i c S i g n a l s/DC CharacteristicsCharacteristic Symbol Min Typ Max Unit NotesLogic Supply Voltage V CC 4.5 5.0 5.5VVcc risetime t VCC0.05V/ms1Logic supply current I CC 1.5 3.0mAInput Low Voltage V IL0.0 1.0VInput High Voltage V IH 4.3Vcc VOutput Low Voltage V OL0.6VOutput High Voltage V OH 4.3VIP1/2 Source Current I OL 1.0mAMotor Voltage V M50VMotor current I M 3.0AMotor resistance R M 2.8ΩClamp diode current I CL250mAStep rate F STEP15000steps/secSpeed Error F ERR+/- 0.5%2Comms bit rate F BIT2400bpsBUSY rise/fall time T RF1025nsResponse time to IP1/2T INP1ms3DIR hold time T DIR8usMax Slave step rate F EXT10000steps/sec4Operating temp t OP070°C5Storage temp t ST-40100°C[1]Required to ensure reliable startup.[2]As a percentage of requested speed[3]Response to IP is lesser of 1ms or 1 step[4]If no comms while stepping. Max = 6000 steps/sec with comms[5]Refer loading derating graphPin functionsConnector 1Pin Function/IP1Optional input 1. Set home. Emergency stop./IP2Optional input 2. Set mark. Emergency stop.BUSY Output - High when motor movingSERIAL OUT Data from Little step-U to controller. TTLSERIAL IN Data from controller to Little Step-U. TTLVcc Supply to logic circuitsGND Supply ground. Common with motor circuits.Connector 2Pin FunctionA Winding A outputB Winding B outputC Winding C outputD Winding D outputCT-AC Common for windings A & CCT-BD Common for windings B & DConnector 3Pin FunctionV OM Motor supply ground. Common with logic circuitsV M Motor Supply +2Little Step-U /Hardware ConnectionPower SupplyThe Little Step-U divides the circuitry into two distinct sections with separate power suppliesrequired for the motor drive and the logic. The logic/control section must be powered by aregulated 5V supply applied to the VCC and GND pins. The motor power supply voltage isdictated by the motor characteristics and is connected to the VM(+) and VOM(-) pins. TheGND and VOM pins are connected on the circuit board as a common reference. The motorpower supply must have sufficient capacity for the motor and if the power supply is notphysically close to the motor/controller, a capacitor (eg. 4700uF) may be required at thecontroller to ensure smooth operation of the motor.Motor ConnectionThe motor connector has 4 connections (A, B, C & D) that are switched to ground in thesequence required to cause the motor to step. Note that stepper motor manufacturers haveseveral methods of labelling the connections to the motor. The Little Step-U labels the pins inthe sequence they are switched when operating the motor with one coil on at a time and drivingin a clockwise direction. ie. A, then B, then C, then D and back to A. The centre taps of thetwo coils are connected to CT-AC and CT-BD, corresponding to the common connection of coilsA & C and coilsB & D respectively. These two connections provide the freewheel diodes foreach of the motor coils and are connected on the circuit board.IMPORTANT: A poor or intermittent connection to any of the stepper motor terminals can resultin destructive voltages being generated and causing permanent damage to the Little Step-U.Similarly, do not connect or disconnect any stepper motor connections while power is applied.The connection point between CT-AC and CT-BD is indicated on the circuit board by thedesignator "LK". This track can be cut and rejoined by soldering a wire between two pads ifneeded. In most cases this isn't required but is provided for applications using and L/xRconfiguration in half step mode.Interface connectionsThe Little Step-U acts on commands received serially from a host controller via the SERIAL INpin. This is an asynchronous interface operating at 2400 bits per second, 8 data bits (LSBfirst), 1 stop bit and no parity. The signal levels are TTL. Some commands illicit a responseand these are sent via the SERIAL OUT pin using the same protocol and signal levels as theSERIAL IN pin.When a command has been sent to the Little Step-U that causes the motor to move, the BUSYpin will be high while the motor is in motion.Two input pins are provided for use with stepper operation in the form of limit or home switchesor can be used as general inputs which can be read by software. These pins accept logic levelinputs and will source 1mA when pulled low, making them suitable for direct connection to theoutput of opto-couplers.TLA Microsystems Ltd 3 /Software commandsCommunication with the Little Step-U is by a TTL level serial interface at 2400bps. Allcommands must begin with a "{" character and end with a "}" Characters outside of the braces(including carriage return and line feeds) are ignored. Responses are enclosed by "[" and "]"characters.A - SET SPEEDSyntax{Axxxxx}Default value100 steps/secSets the maximum speed in steps per second for any commands that follow. Thenumeric value can be any number from 1 to 5000.B - SET RAMP TIMESyntax{Bxxx}Default value0 secondsThe Little Step-U has a built in function to accelerate and decelerate the stepper motorto/from the speed specified by the command above. This command sets the amount oftime in tenths of a second that the motor will accelerate to that speed. Valid numbersare 0 to 200 being 0.0 to 20.0 seconds in 0.1 second increments.Any move function that utilises the ramping facility will accelerate and decelerate at therate defined by this command. The distance moved includes the steps used to ramp upand ramp down so a move of 1000 steps will move exactly that amount. If the number ofsteps requested is less than the number required to ramp to full speed and ramp downagain, the Little Step-U will accelerate at the same rate until it is half way to itsdestination and then ramp down again to stop at the commanded position.See the discussion on ramping after the command descriptions.C - SET STEP MODESyntax{Cx}Default value0 (Full step drive)Stepper motors can be driven by powering the windings sequentially using three differenttechniques. The method used is specified by this command with x being 0, 1 or 2.{C0}Full stepFor every step, two windings are energised.Step Coil A Coil B Coil C Coil D1ON ON Off Off2Off ON ON Off3Off Off ON ON4ON Off Off ON{C1}WaveEach step has only one winding energised.Step Coil A Coil B Coil C Coil D1ON Off Off Off2Off ON Off Off3Off Off ON Off4Off Off Off ON4Little Step-U /{C2}Half stepEach alternate step has one or two windings energised giving the motor twicethe number of steps per revolution.Step Coil A Coil B Coil C Coil D1ON Off Off Off2ON ON Off Off3Off ON Off Off4Off ON ON Off5Off Off ON Off6Off Off ON ON7Off Off Off ON8ON Off Off ONWhen the mode is changed to or from Half step, the position, mark and speed values areadjusted accordingly so that the motor will turn at the same rotational speed and themechanical positions remain unchanged.Example: A 200 step/rev motor is being used. The current position is 3600, speed is setat 200 steps per second and there is a mark at 1200. When the mode is changed fromfull-step to half step, the speed value will be 400 (giving the same number of revolutions ofthe motor per second). The current position register and the mark register will containthe values 7200 and 2400 respectively.D - GO TO ABSOLUTE POSITIONSyntax{Dxxxxxxxx}At anytime after powerup, the Little Step-U keeps track of its current position in steps.This command instructs the Little Step-U to calculate the direction and number of stepsrequired to move to another position and then it performs the move. At the end of themove, the position will be the number specified in this command. The value can be anynumber from -10000000 to +10000000, including 0. The number may be preceded by a"+" or "-" as required, but must not include a comma or decimal point.Example: If the current position is 2500, a command of {D-1000} will cause the motor torun counter-clockwise for 1500 steps, stopping at position 1000.E - GO TO RELATIVE POSITIONSyntax{Exxxxxx}This command is similar to the "D" command in respect to the numeric parameter, butcommands the motor to move to a position relative to its current position. Positivenumbers are clockwise and negative numbers are counter-clockwise.Example: If the current position is 2500, a command of {E1000} will cause the motor torun 1000 steps clockwise to end at position 3500.F - GO TO ABSOLUTE POSITION WITH INPUTS 1 & 2 AS STOPSSyntax{Fxxxxxx}This command is the same as the "D" command except that the two input pins aremonitored. If either of them is pulled low during the move, the motor will be deceleratedto a stop at the rate defined in the RAMP command (B). The position register will reflectthe current position when the motor has stopped. These inputs are level sensitive so if a“F” command is used when one of the inputs is low, the motor will stop immediately.Note: Allowing the motor to continue to running past a stop indicator is done for tworeasons; This method allows the motor to provide maximum braking torque duringdeceleration and the position register integrity is maintained.TLA Microsystems Ltd 5 /Example: If the current position is 2500 and a limit switch attached to I/P2 is at position5000, the command {F8000} will result in the motor stopping at position 5087 (dependingon the SPEED and RAMP settings).G - GO TO RELATIVE POSITION WITH INPUTS 1 & 2 AS STOPSSyntax{Gxxxxxx}This command is the same as the "E" command except that the two input pins aremonitored as in the command above.Example: If the current position is 2500 and a limit switch attached to I/P1 is at the homeposition (0), the command {G-5000} will result in the motor stopping at position -87(depending on the SPEED and RAMP settings).H - GO CLOCKWISE UNTIL INPUT 2Syntax{H}This command is used to find a limit stop connected to I/P2 and has no numericparameter. The motor will accelerate at the rate determined by the RAMP setting, up tothe SPEED setting and not stop (ramp down) until I/P2 is pulled low.Example: The motor is at position 28 and a limit switch is at position 1000. The SPEEDhas been set to a slow value and RAMP set to 0. After an {H} command the position is1000.J - GO COUNTER-CLOCKWISE UNTIL INPUT 1 AND ZERO POSITIONSyntax{J}The J command is similar to the H command above except that the direction is reversedand I/P1 is used to halt the movement. When the movement is stopped, the positionregister is cleared to 0 to mark this position as "Home".Example: The motor is at an unknown position and a {J} command is used at a slowspeed and 0 RAMP rate. At the end of the movement (dictated by I/P1) the positionregister is 0.K - GO CLOCKWISE UNTIL INPUT 2 AND MARK POSITIONSyntax{K}The motor runs continuously in a clockwise direction until stopped by I/P2 being pulledlow. When this occurs, the position is recorded in the MARK register.Example: The motor has been moved to the home position using the {J} command.Issuing a {K} command will run the motor and when it has stopped, the position of theother limit switch has been recorded.M - GO TO THE MARK POSITIONSyntax{M}This command instructs the Little Step-U to move to the absolute position held in the"Mark" register. The contents of this register is set to 0 when the device is powered onand can be set using the "K" or "R" commands. As with the "D" (Go to absoluteposition) command, the controller will determine the direction and will use the Ramp andSpeed settings to move to that position.Example: The Little Step-U is being used in a component placement machine and theposition to pick up the next component is known to always be 123456. After eachplacement, a {M} command will place the pickup head over the next component to beplaced.6Little Step-U /N - GO TO THE HOME POSITIONSyntax{N}Sending an "N" command will cause the Little Step-U to move the motor to the 0, orhome position. The position register defaults to 0 when the device is powered on and canbe set to 0 by the "J" or "Q" commands.Example: A Little Step-U is being used to position a print head in a dot matrix printer. Ateach Carriage Return in the data being printed, an {N} command is issued to return thehead to the left margin, ready for the next line.P - SET OFF STATE POWERSyntax{Px}When the motor is not being moved, the coils can be left energised for maximum holdingtorque or turned off to reduce power consumption and motor heating. This command setsthe state as off {P0} or on {P1} and will remain that way until changed with another "P"command. Power on default is off.Example: A motor is being used in a high vibration environment and retaining position ismore important than power consumption. The {P1} command ensures maximum holdingtorque.Q - SET HOME POSITIONSyntax{Q}This command unconditionally sets the position register to 0. All position information andabsolute moves become relative to this new home position.Example: A drilling sequence needs to be repeated several times over a panel. The totalsize of the program can be reduced by moving the offset amount, resetting the homeposition with the {Q} command and repeating the same sequence.R - SET MARKSyntax{R}This command instructs the Little Step-U to remember the current position. It is used inconjunction with the {M} command which will return the motor to this same positionregardless of any intervening moves.Example: A stepper motor is being used in a piece of hastily constructed test equipmentto rub an abrasive over a surface. The distance is found by trial and error and a mark isset with the {R} command. The experiment can then be run using the {Q} (Go to home)and {R} (Go to mark) commands in a loop.S - SWITCH TO REMOTE MODESyntax{S}The Little Step-U can be operated as simple translator/drive for use in systems withenhanced motion control capability or for the purposes of experimentation. This mode ofoperation is entered by sending the {S} command. Input pin 1 will then act as the STEPinput and Input pin 2 will act as a DIRection input.On each high to low transition (falling edge) of the STEP input, the motor will move onestep in the direction indicated by the DIR input. A high on the DIR input will cause themotor to step clockwise and a low, counter-clockwise. This input must be stable whenSTEP is taken low and for tDIR afterwards. When in REMOTE mode, the mode settingsthat were set with the {C} command (wave, full, half step) remain in force and the position TLA Microsystems Ltd 7 /register is updated with each step. The {S} command will turn the motor windings on,regardless of the value set by the {P} command.Example: During the commissioning phase of a machine, the operator wishes to move toa target position one step at a time using a pushbutton. The {S} command is sent andthe microcontroller is used to debounce each button press and apply a single pulse.When the desired destination is reached, the position is read using the {U} command.T - RETURN FROM REMOTE MODESyntax{T}When the Little Step-U is operating in the REMOTE mode, sending a {T} will return to thestandard operating mode. The position register contents are valid and the motor windingswill be powered on or off according to the value previously set by the {P} command.Example: Once the setup phase described above has been completed, a {T} commandreadies the controller for full speed operation.U - SHOW CURRENT STATUSSyntax{U}Returns[aaaa,bbbb,ccc]The {U} command instructs the Little Step-U to send the current values of the Position,Speed and Ramp registers back to the controller. The data consists of enclosing squarebrackets ("[" and "]") containing the three (decimal) values separated by commas.Example: A stepper is being used to move a print head mechanism. In order todetermine the paper width the user has selected, the motor is moved to one stop andzeroed and then moved slowly to the other stop with RAMP set to 0. When the motorstops (BUSY goes low), the position is retrieved with the {U} command. The controllercan then use this value to scale the print head movement commands and ensure that animage will fit on the page.V - SHOW STATE OF INPUT PINSSyntax{V}Returns[a,b]The {V} command returns the current state of the two input pins in the form of "0" for alow input and "1" for a high.Example: An {G-1000} command is issued which instructs the Little Step-U to move1000 steps counter-clockwise from the current position and to stop if it encounters a lowinput on either IP1 or IP2. Checking that the complete move was made successfully ismade easier by only having to check two single digits with the {V} command, thansubtracting the current position from the earlier position and checking the result.Multi-parameter commandsMovement related commands have the option of including speed, ramp time and/or step modevalues in the form of {X,speed,ramp,mode} where X is the command listed below and speed,ramp and mode are valid values as described for the A, B and C commands above. Eachparameter is separated by a comma and may either be a value or no value (without spaces) ifthat parameter is to remain unchanged. Any setting changed by using a command in this formwill remain at the new value for any subsequent commands unless explicitly changed.D GO TO ABSOLUTE POSITIONE GO TO RELATIVE POSITION8Little Step-U /TLA Microsystems Ltd 9F GO TO ABSOLUTE POSITION WITH INPUTS 1 & 2 AS STOPSG GO TO RELATIVE POSITION WITH INPUTS 1 & 2 AS STOPS H GO CLOCKWISE UNTIL INPUT 2J GO COUNTER-CLOCKWISE UNTIL INPUT 1 AND ZERO POSITION K GO CLOCKWISE UNTIL INPUT 2 AND MARK POSITION M GO TO THE MARK POSITION N GO TO THE HOME POSITIONExamples:{D-2000,200,5}Go to absolute position -2000 with a maximum speed of 200 steps per second, accelerating to that speed over a period of 0.5 seconds and use the currently set drive mode.{N,,,0}Go to the HOME position using the current speed and ramp settings but change the drive mode to full step.Ramping or Trapezoidal speed profile.The ability to accelerate a stepper motor over a period of time, greatly improves the useful range of operations the motor can perform. Not only does this allow the motor to reach higher speeds,but also reduces wear on mechanical components. While acceleration is defined as a change in speed over a period of time (steps/sec/sec), it is easier to think of the motor accelerating to a desired speed over a defined time period, so the B command is used in this manner.The graph below illustrates a typical move where the final speed, ramp time and destination position have been specified. Both the position (in steps) and the speed (in steps per second)show how the motor moves slowly at the beginning, at the maximum rate for the majority of the move and then transitions smoothly into the deceleration phase, before coming to a stop at the desired position. Because of the shape of the curve, the speed plot is known as a trapezoidal speed profile.When the distance to be moved is less than that required to ramp up to full speed and then ramp down again, the acceleration rate is kept the same and half way through the move, the Little Step-U will begin the deceleration. An example is illustrated below. The speed and ramp values are unchanged for two discrete move operations. The first is long (far) enough for the motor to reach the specified operating speed but because Move 2 is shorter, the motor transitions directly from accelerating in speed to the deceleration profile.Final Speed/PositionMove 1Move 2TimeThe ramp function used in the Little Step-U is a piecewise, linear ramp of frequency in 64 steps.The motor is run at each of these speeds for a period that is 1/64 of the ramp time requestedwith the {B} command.If long ramp periods are used with a high final speed, the steps are discernible to the ear but stillachieve the desired effect of not accelerating the motor at excessive rates.When using relatively slow final speed settings with short ramp times, the situation arises wherethe first few steps take longer than the allocated time.For example, a motor accelerating to a final speed of 640 steps/sec will run at 10 steps/sec, 20,30, etc. At 10 steps/sec, each step takes 100ms. If the ramp time setting is 2 (for 200ms),clearly a problem has arisen as the first step has used half of the ramp time for one step.The Little Step-U addresses this situation by dividing the ramp time into 64ths. If the length ofone step at the required speed is less than 1/64 of the ramptime, that step rate is skipped.In the example above, 1/64 of the total ramp time (200ms) is 3.1ms which is the period of onestep at 320 steps/sec, so the first step will be at the 320 steps/sec rate, the next at 330steps/sec, etc. This means that the motor doesn’t actually turn until halfway through theramping period (320 = half of the final speed 640). Rather than have the motor doing nothing forthe duration of this dead period, the delay is bypassed and the motor will appear to startimmediately at 320 steps/sec and take only 100ms to get to the final speed, even though the Bcommand specified 200ms.The net result is that the motor acceleration in steps per second per second is still the sameand this is the important parameter. Having it specified as a time to reach final speed is aneasier concept to grasp and is also a simple figure to calculate from a required accelerationrate.Ramping and forced stopsWhen the motor is forced to a stop from an external input (IP1 or IP2) and a ramp value otherthan zero has been specified, the motor will begin decelerating at that point. Obviously the finalresting position will be different from that when the input occurred. Where the input is used tospecify a position, the register is updated when the input occurs, not when the motor completesthe ramp down.For example, the {J} command runs the motor counter-clockwise until IP1 is pulled low andmarks that position as zero. If the ramp value is 0, the motor will stop there and the positionregister will hold 0. If a ramp period has been specified, the position register will hold a negativevalue, indicating the number of steps used to decelerate to a stop. The {N} command (Go to theHome position) can then be used to move the motor to where the input occurred.10Little Step-U /分销商库存信息: PARALLAX 27938。
UPC2711T中文资料

Gain, GS (dB)
Noise Figure, NF (dB) Gain, GS (dB)
* UPC2708T only
Circuit Current, ICC (mA)
CIRCUIT CURRENT vs. TEMPERATURE
40 VCC = 5.0 V
35
30 UPC2708T
25
20
UPC2708T POWER vs. FREQUENCY
25 VCC = 5.0 V
20 X
15 X
10
P1dB 5
X PSAT
0
-5 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
Frequency, f (GHz) X: Typical SSB Third Order intercept Point
元器件交易网
3 GHz SILICON MMIC UPC2708T WIDE-BAND AMPLIFIER UPC2711T
FEATURES
• WIDE FREQUENCY RESPONSE: 3 GHz • HIGH GAIN: 15 dB (UPC2708T) • SATURATED OUTPUT POWER: +10 dBm (UPC2708T) • INTERNAL CURRENT REGULATION MINIMIZES GAIN
5
4 0
0.5
1.0 1.5 2.0 2.5 3.0
Frequency, f (GHz)
Output Power, POUT (dBm)
Output Power, Pout (dBm)
UPC2711T OUTPUT POWER vs. INPUT POWER AND TEMPERATURE
27971;中文规格书,Datasheet资料

Web Site: Forums: Sales: sales@Technical: support@Office: (916) 624-8333Fax: (916) 624-8003Sales: (888) 512-1024Tech Support: (888) 997-8267Motor Mount and Wheel Kit (#27971) withPosition Controller (#29319)Featuresy Powerful DC motors for plenty of torque~150 RPM @ 12.0 VDC, 1.50 A, no load~190 RPM @ 14.5 VDC, 1.60 A, no loady Precision machined 6061 aluminumhardwarey Conveniently positioned screw holes makemounting this kit a breeze.y Rugged pneumatic tires are well-suited fora variety of terrainsy+5 volt Supply for Position Controllersy36 encoder positions per revolution;approx 0.5 inch resolution with 6” wheely Compatible with any microcontrollery Single I/O line can control up to 4 PositionControllersy Strong but light: only 3.2 lbs (1.45 kg) perwheel assembly (kit contains two).Application Ideasy Sturdy and stylish midsize robot platformsy Accurate distance trackingy Autonomous exploration and datacollectiony Part of a robust navigation system whenincorporated with GPS and compassmodulesGeneral DescriptionThe Motor Mount and Wheel Kit combinespowerful 12 VDC motors and precision machinedaluminum hardware to provide the power,strength, and beauty demanded by midsizedrobots. All custom parts are CNC machined atParallax headquarters in Rocklin, California from6061 billet aluminum. Conveniently positionedscrew holes on the top, bottom, and front face ofthe bearing blocks provide a variety of quick andeasy mounting options. The included 6 inch (15.3cm) pneumatic rubber tires are durable enough tohandle a variety of smooth or rugged terrainswithout hesitation.The Position Controllers use a quadrature encodersystem to reliably track the position and speed ofeach wheel at all times. With the included plasticencoder disks, each Position Controller has aresolution of 36 positions per rotation; thisequates to approximately 0.5 inches of lineartravel per position using the included 6 inch tires.The Position Controllers calculate and reportposition and average speed data on command.This leaves the main processor free to handlemore important tasks like reading GPScoordinates, processing sensor information, andmaneuvering complex environments.The Position Controllers are compatible with anymicrocontroller via a single-wire half-duplexasynchronous serial communication (UART) bus.Up to four Position Controller devices can becontrolled on the same bus to minimize I/Orequirements.For increased functionality, Position Controllerscan be interfaced with HB-25 motor controllers(#29144; sold separately) to control the positionof the wheel and automatically provide smoothspeed ramping as well as accurate positionadvancement capability.Table of ContentsBill of Materials (2)Assembly Instructions (3)Position Controller Device Information (8)Pin Description (8)Absolute Maximum Ratings (8)DC Electrical Characteristics (8)Theory of Operation (9)Setting the Device ID (10)Interfacing with the HB-25 Motor Controller (11)Command Set Summary (11)Command Set Summary Table (12)Command Set Details (12)QPOS – Query Position (12)QSPD – Query Speed (13)CHFA – Check for Arrival (13)TRVL – Travel Number of Positions (13)CLRP – Clear Position (14)SREV – Set Orientation as Reversed (15)STXD – Set Tx Delay (15)SMAX – Set Speed Maximum (16)SSRR – Set Speed Ramp Rate (16)Communication Protocol (17)Module Schematic (18)Dimensions (18)Example Code (19)Hardware Dimensional Drawings appended.Bill of MaterialsPart # Description Quantity 27958 Motor, 12 VDC Left Hand1 27959 Motor, 12 VDC Right Hand1 29319 Dual Position Controller Assembly–Contains the following: 1550-29319 Position Controller PCB Assy. 2710-00005 #4-40 x 3/16” Flat Head Screw 4721-00005 Plastic Encoder Disk 2805-00002 Servo Extension Cable, 14” 2Bearing Block –6061 Aluminum2 34010 Motor34015 Wheel, main rim section –6061 Aluminum2 34016 Wheel, rim ring section –6061 Aluminum2 34021 Axle – 6061 Aluminum2700-00100 1/8” x 1” Roll Pin2710-00015 #4-40 x 0.5” Flat Head Screw12710-00105 1/4”-20 x 0.625” Button Cap Screw2710-00110 M4 x 50 mm Socket Cap Screw 6713-00012 3/8”-OD, #8-ID x 1” Aluminum Spacer6721-00004 Inner Tube, 6” x 1-1/4” Pneumatic, with valve stem cap2721-00006 Knobby Tire, 6” x 1-1/4” Rubber2724-00001 0.5” ID x 1.125” OD Ball Bearing2Assembly InstructionsThe following directions apply to both right-hand and left-hand assemblies. Tools Required (not included)•Size 1 Philips-tip screwdriver• 3 mm Hex key•5/32” Hex key•Hammer•Wood block•Dish soap•Tire pumpStep 1: Slide encoder disk and bearing on axleSlide the plastic encoder disk for thePosition Controller on the axle withthe tapered sleeve oriented awayfrom the larger axle end. Then slidethe bearing onto the axle.Step 2: Insert bearing into mounting blockCarefully slide the axle and bearingassembly into the bearing pocket ofthe mounting block.Important: Do not force thebearing into the bearing pocket.The pocket is precision machined tofit the bearing exactly. If the bearingdoes not slide in with delicatepressure, slightly adjust the insertionangle and try again. Using excessiveforce can cause the bearing to bind inthe pocket and become very difficultto insert.Step 3: Align axle and assemble mounting block with motorAlign the drive shaft of the motor with thecorresponding square cutout in the axle. Ifnecessary, turn the axle by hand until it mesheswith the motor shaft.Align the mounting block so that the appropriatecounter-bored holes in the block align with thescrew holes in the motor casing. Using a 3 mmhex key, install the three M4 x 50 mm socket capscrews with three 3/8” OD x 1” round spacers tofasten the block to the motor.Step 4: Insert roll pin in axlePosition the end of the axle so the roll pin can be inserted vertically through the side of the shaft. Using a small hammer, tap the roll pin through the hole until the pin is centered in the axle (simultaneously avoid striking fingers with hammer). It is advisable to perform this operation against a scrap wooden block to prevent possible damage to the axle.Step 5: Assemble tire, tube, and wheelInsert the pneumatic tube into the tire. It may help to slightly inflate the tube so it holds its shape in the tire. Mount the tube and tire onto the main wheel section, making sure the valve stem projects through the cutaway in the wheel. Note: it is entirely personal preference whether the valve stem extends toward the inside or outside of the wheel. If there is any resistance when sliding the tire on the rim, apply a small amount of dish soap and water to the inside rim of the tire as lubrication.Mount the inside rim ring section using six #4-40 x ½” flat head screws as shown above. Make sure the rubber tube and tire do not get pinched when tightening down the rim. This can be accomplished by compressing the side wall of each tire while tightening the screws.Step 6: Inflate tire to desired pressureThe recommended tire pressure is 36 PSI; however, ideal tire pressure may vary depending on the intended terrain. For example, in more rugged outdoor environments, a lower tire pressure may improve traction and result in a smoother ride. For solid, flat ground, and for most indoor floor surfaces, a firm tire is preferable and will generally be most efficient. Experimentation is recommended to find the ideal pressure depending on robot weight and intended terrain.Step 7: Mount the wheel on the axle Slide the wheel onto the axle, aligningthe slot in the wheel with the roll pin inthe axle as shown at right.Fasten the wheel to the axle using the1/4"-20 button cap screw and a 5/32”hex key.WARNING!! Do not insert fingersinto the wheel holes. Do not allowhair or clothing to become entangled in the motor mount assembly.Step 8: Mount the Position Controller circuit boardUsing two #4-40 x 3/16” flat head screws,mount the Position Controller circuit boardin the cutout on the top side of themounting block. Check the alignment ofthe plastic encoder disk to make sure itwill not interfere with the optical sensorsas the axle rotates.Adjust the position of the plastic encoderdisk on the axle so it passes through thesensor gap with roughly equal clearanceon each side. If the encoder disk cannotbe adjusted enough to avoid interferencewith the sensor, or if the sensors are notsymmetrically aligned, it is possible toslightly re-align the sensors on the circuitboard. Apply just enough finger pressureto nudge the sensor to the ideal location.Completed Motor Mount and WheelKit Assembly with Position ControllerPosition Controller Device InformationPin DescriptionAbsolute Maximum RatingsNOTICE: These values are the limit before permanent damage may occur, but proper operation of the device is not guaranteed all the way up to these values. See the “Electrical Characteristics” section for recommended operating conditions for the Position Controller.ParameterMin.Max.UnitsOperating Temperature (1) -55 125 °C Storage Temperature (1) -65 150 °CVoltage on Data Pin (with respect to Ground) (1) -0.5 V CC +0.5 VMaximum Operating Voltage (1) -- 6.0 V (1) These values are taken from the Atmel ATtiny2313 device documentation.DC Electrical CharacteristicsAmbient Temperature = -40°C to 85°C ParameterMin. Typ. Max.UnitsOperating Voltage (V CC )4.55.0 5.5(1)V Average Power Supply Current (I CC ) -- 50 -- mA Ground (GND)----V Data Pin Input Low Voltage (1)(2) -0.5 -- 0.3V CC VData Pin Input High Voltage(1)(2)0.6V CC -- V CC + 0.5VSignal Pin Output Low Voltage (1) -- GND 0.7(3) V Signal Pin Output High Voltage (1) 4.2(3)V CC -- VNotes:(1) These values are taken from the Atmel ATtiny2313 device documentation. (2) V CC = 4.5 V to 5.5 V (3) V CC = 5 V; I PIN = 20 mAPin Name FunctionDATA Communication line used to send and receive data – Connect to single-wire UART bus+5VRegulated DC Supply Voltage (V CC )GND Common GroundSIGNALPulse output line to control anoptional HB-25 motor controller ToController +5 VDC SIGNAL GNDTo HB-25N/CTheory of OperationThe Position Controller is designed to manage certain operations associated with wheel motion that traditionally consumed system resources, processing power, and execution time in the main microcontroller. By using the Position Controller to manage these functions instead, the main microcontroller is free to focus on more important tasks.Each Position Controller has an on-board microcontroller which continually tracks the position and average speed of the wheel. In conjunction with the plastic encoder disk, two optical interrupter switches generate a quadrature encoded waveform which is processed by the microcontroller. Based on the rate and specific sequence of the pulses, it is possible for the Position Controller to determine how fast, and in which direction, the wheel is turning.Figure 1Quadrature encoded voltage waveforms for a wheel rotating at 4 positions per second. Notice that rising edges occur first on Sensor 1, signifying that the wheel is rotating in the positive direction.Figure 2Quadrature encoded voltage waveforms for a wheel rotating at 2positions per second. In this case, rising edges are seen on Sensor 2 first, signifying a negative direction of rotation.The current position value appropriately increments or decrements by 1 each time there is a waveform transition. The current average speed value is updated every 20 ms and is an accumulated average over the previous 0.5 seconds. It is important to note that this is an average speed value, not the instantaneous speed of the wheel. See the Command Set Details section on page 12 for more information.The Position Controller automatically generates the appropriate pulses to drive an HB-25 motor controller (#29144; sold separately). See Interfacing with the HB-25 Motor Controller on page 11 for more information. This configuration dramatically increases the Position Controller’s functionality since it gains control over the wheel’s position and speed rather than simply measuring them. The Position Controller stores the desired location as a set point which it continually seeks. If the wheel is rotated away from the current set point, it increases power to the motor in the opposite direction in order to return back to the original position. Additionally, when the wheel is being driven on an incline or decline, the Position Controller automatically increases or decreases power to the motor to maintain the true desired speed.1 second2 seconds0 seconds Sensor 1Sensor 21 second2 secondsSensor 1Sensor 20 secondsThe position advancement scheme is designed to move the wheel a user-set distance (TRVL command) at a user-set maximum speed (SMAX command) with smooth user-set acceleration and deceleration (SSRR command) along the way. Each variable has a default value when powered on, but can be directly modified with specific commands (see the Command Set Details section on page 12 for more information). A typical speed profile for traveling a certain distance is shown in Figure 3 below.Figure 3Typical speed profile fortraveling a certaindistance. The set point is advanced incrementally until it reaches the endpoint.When the wheel advances toward the end point, it is really the set point that is being incrementally advanced. Higher speeds are achieved by advancing the set point by a greater distance each increment than for lower speeds. Since the Position Controller constantly drives the wheel to match its set point, it is able to achieve the true overall user-set speed.The Position Controller accelerates at the user-set speed ramp rate until it reaches the user-set speed. Then it uses the current average speed to calculate the distance required to decelerate smoothly to the final end point without overshoot. When traveling in one direction, if a new position advancement value requires the wheel to reverse direction, it will still decelerate smoothly to a stop at the user-set ramp rate before re-accelerating in the opposite direction toward the new end point.The main microcontroller communicates easily with up to four Position Controllers over a single-wire universal asynchronous serial receiver and transmitter (UART) bus. The UART operates at 19.2 kbits/sec data rate, 8-bit frame, 1 stop bit, no parity. See the Module Schematic section on page 18 for details on how the bus is electrically connected. In most cases, the data line on the Position Controller can be directly connected to the main microcontroller with no additional external components required.Setting the Device IDWhen more than one device is connected on the same bus, it is necessary to give each device a unique device ID. Each device’s ID value is physically set by its corresponding jumper configuration read when powered on (see table below). Notice that the possible values are 1 through 4. Commands can address ID 0 as a special case address to send commands to all devices at once. Devices are shipped with both jumpers installed (ID value 1).devices at once.Start PointEnd Distance (in positions)分销商库存信息: PARALLAX 27971。
UPC功能说明书

Standard Features:•Advanced Linear Amplifiers Provide Very Low Voltage Distortion, no Switching Noise, Fast Voltage and Current Slew Rates, Exceptionally Low Output Impedance and High Peak Current Capability• 1, 2, or 3 Phase Output Form selectable from front panel or bus command•20 to 5,000 Hz. Full Power Bandwidth Operation – 5Hz to 50KHz small signal bandwidth, 3dB at 10% of full voltage• Precision Voltage Programming – 0.05% with Continuous Self-Calibration (CSC) engaged • True-RMS Metering of Volts, Amps, and Power • GPIB (IEEE-488.2) or RS-232 Interface • Waveform Library – Arbitrary Waveform Generator• Up to 99 Programs with Associated Transients for Static and Dynamic Test Applications •UPC Studio Software SuiteAvailable Options:• Programmable Output Impedance• Harmonic Analysis and Waveform Synthesis • Peak Inrush Capture and Waveform Analysis (Available on models with UPC3 controller)•UPC Test Manager SoftwareUPC Manager Software SuiteMaster the Power of the Wave!UPC Manager Software gives you the tools neces-sary to quickly and easily operate your AC Power Source. With our graphical interface control all areas of your AC Power Source testing with simple presets, user prompts, test sequences, test plans and custom reports.Model 312AMXFREQUENCY CONVERSION R & D MANUFACTURING AEROSPACE MILITARYCUSTOM1, 2, or 1,200VA 20-5,000 HzModel 312AMXAs a member of Pacific Power’s AMX-Series popular family of high performance Linear AC Power Sources, the 312AMX offers the same low output voltage noise and distortion, ease of installation, and high AC waveform fidelity as found in all of Pacific Power’s Linear AC Power Sources. Control and operational features provide a high degree of versatility and ease of use for applications ranging from simple,manually controlled frequency conversion to harmonic testing and sophisticated programmable transient simulation.AC TEST POWERAll 312AMX models are equipped with a powerful micro-controller with the ability to operate as a fully integrated test system. This enables a variety of power conditions and transients to be applied to the device under test while metering and analyzing all output performance parameters. For higher power requirements, refer to the AMX & ASX series catalog.FREQUENCY/ VOLTAGE CONVERSIONThe 312AMX is an excellent source of stable AC Voltage over the frequency range of 20 to 5,000 Hz when using the high-end UPC-32 controller. Also available in 1,200 Hz maximum output frequency when using UPC3 or Manual controller. The output frequency is quartz-crystal stabilized. Output voltages up to 300V L-L in split phase mode and 260V L-L in three phase mode are available on the 312AMX model.PHASE CONVERSIONWith the ability to provide either single or two phase output, the 312AMX is a good choice to convert one-phase line voltage into precisely controlled split (two-phase) or three-phase output power.UPC SERIES CONTROLLERThree controller models are available in both manual and programmable control version. All controllers provide manual operation from the front panel. Programmable Controllers may be operated from the front panel or from a remote interface via RS 232 or GPIB.The Leader in AC Power TechnologyAn early pioneer in the development solid-state power conversion equipment, Pacific Power Source continues to develop, manufacture, and market both linear and high-performance PWM AC Power Sources. Pacific Power Source’s reputation as a market and technology leader is best demonstrated by its continuing investments in both research and development and world-wide customer support. With corporate owned offices in the United States, France, the United Kingdom, and China, local personalized support is always available.1Ø42Ø43Ø40-150V L-N 0-300V L-L0-150V L-N / 0-260V L-LNOTES:1. Rated output power is based on a combination of nominal output voltage, rated current and load power factor. Values stated represent the maximum capabilities of a given model (maximum power in split phase (Form2) direct coupled mode is 800VA). Consult factory for assistance in determining specific unit capabilities as they might apply to your application.2. Unit is operable as single phase with dual range capability or 3 phase. Output voltage range and 1/2/3 conversions are selected by front panel or bus commands.3. Vmax is output voltage with nominal input and full rated load applied.4. Available current will vary with output voltage and power factor. Current shown is per phase.Output RatingsThermal and Power Factor Rating CurvesAMX Power Source Specifications (PF = 1.0, V out > 25% F.S.)Input Power Requirements (47-63 Hz)312AMXOutput Frequency Line Regulation Load Regulation Ripple and Noise OUTPUT VOLTAGE-AC VOLTS RMSShort term overloads to 150% are permitted. Operating time before thermal shutdown or circuit breaker trip varies from sec-onds to several minutes depending upon line and temperature conditions.THERMAL RATING -AC CURRENT RMSShort tem overloads to 150% of rated current are permitted.Operating time before thermal shutdown or circuit breaker trip varies from seconds to several minutes depending upon line and temperature conditions.Rated Continuous Load Current as a Function of Ambient Temperature and Power Factor and Output Voltage at Nominal Input Line.The UPC Controlleris a highly versatile one, two, or threephase oscillator/signal generator designed to control any ofPacific Power’s AC Power Sources. Three controller models,UPC-3M, UPC-3, or UPC-32 are offered. To use the full 5KHz power bandwidth of the 312AMX, the UPC-32 controller isrequired.Controller ModelsOutput Control SpecificationsTotal Control, Metering, and Analysis of AC Power- Simple, Intuitive OperationWaveform ControlExternal Inputs/OutputsOutput MeteringUsing the front panel keyboard and display , all controllermodels provide for selection of power source output mode, cou-pling, voltage, and frequency. Selecting the correct UPC controller for a given application varies with your test requirement, desired features, and price.Both the UPC-3 and UPC-32 Controllers are available witheither RS-232 or GPIB remote interface. Commands are structured in accordance with SCPI (Standard Commands for Programmable Instruments).© 2012 Pacific Power Source, Inc. Subject to change without notice. #DS312AMX101217692 Fitch, Irvine, CA 92614 USAPhone: +1 949.251.1800 Fax: +1 949.756.0756 T oll Free: 800.854.2433E-mail:**********************19" (483mm)Ordering InformationAvailable Models312AMX-UPC3M312AMX-UPC3312AMX-UPC32 General/EnvironmentalMechanical SpecificationsSoftware/Firmware OptionsProtection and SafetyOrder Example312AMX-UPC32, V IN : 120VAC • 1,200VA, 3-Phase, AC Power Source with UPC-32 programmable controller.• Standard GPIB Interface•120VAC, 1 Phase Input VoltageTypical Delivery Items• AC Power Source• English Manuals (AC Source and Controller)• UPC Studio Software - (Download)• UPC Interactive LabVIEW TM Libraries (Download)• Compliance Certificate with Test data •CE Conformity Document (CE Models)。
ASUS PG279Q 液晶显示器 用户指南说明书

PG279Q 系列液晶显示器用户指南第一版 V12015 年 9 月版权所有 © 2015 ASUSTeK COMPUTER INC. 保留所有权利。
除了购买者出于备份目的而保留的文档外,未经 ASUST eK COMPUTER INC.(以下称“ASUS”)明确书面许可,不得以任何形式或通过任何方式复制、传播、转录本手册的任何部分,包括其中介绍的产品和软件,也不得将其存储到检索系统中或翻译成任何语言。
在下列情况下,不能享受产品保修或维修服务:(1) 产品被修理、修改或改动,除非此类修理、修改或改动得到 ASUS 的书面授权;(2) 产品序列号损毁或缺失。
ASUS“按原样”提供本手册,不提供任何明示或隐含的担保,包括但不限于对于适销性或针对特定目的的适用性的隐含担保或条件。
无论在任何情况下,ASUS 及其董事成员、高级职员、员工或代理不对由于本手册或产品中存在任何缺陷或错误而导致的任何间接、特殊、偶然或必然损失(包括收益损失、业务损失、不能使用或数据丢失、业务中断等)承担任何责任,即使 ASUS 已被告知此类损失的可能性。
本手册中包含的规格和信息仅供一般性参考,可能会随时变更而无需另行通知,因此不应构成ASUS 的承诺。
ASUS 对本手册(包括其中介绍的产品和软件)中可能存在的任何错误不承担任何责任。
本手册中出现的产品名称和公司名称可能分别是或不是相应公司的注册商标或版权,仅用于标示或解释目的,无意侵犯其所有者的权益。
ii声明 (iv)安全信息 (v)保养和清洁 (vi)Takeback Services (vii)第 1 章:产品介绍1.1 欢迎使用!...........................................................................1-11.2 物品清单 ..............................................................................1-11.3 显示器简介...........................................................................1-21.3.1 前部概览.................................................................1-21.3.2 后部概览.................................................................1-31.3.3 GamePlus 功能 ......................................................1-41.3.4 TURBO 功能(仅适用于 DisplayPort 输入) .........1-5第 2 章:设置2.1 调整显示器...........................................................................2-12.2 连接线缆 ..............................................................................2-22.3 打开显示器电源....................................................................2-2第 3 章:一般说明3.1 OSD(屏幕显示)菜单 ........................................................3-13.1.1 如何重新配置..........................................................3-13.1.2 OSD 功能介绍........................................................3-13.2 规格摘要 ..............................................................................3-63.3 故障排除(常见问题).........................................................3-73.4 支持的运行模式....................................................................3-7iii联邦通信委员会声明本设备符合 FCC 规则第 15 部分的要求其操作符合以下两项条件:•此设备不会产生有害干扰,并且•此设备必须可以承受任何接收到的干扰,包括可能导致不正常操作的干扰。
ASUS PG279Q系列LCD监视器用户指南第二版九月2015年版权所有说明书
PG279Q series LCD MonitorUser GuideFirst EditionSeptember 2015Copyright © 2015 ASUSTeK COMPUTER INC. All Rights Reserved.No part of this manual, including the products and software described in it, may be reproduced,transmitted, transcribed, stored in a retrieval system, or translated into any language in any form or by any means, except documentation kept by the purchaser for backup purposes, without the express writtenpermission of ASUSTeK COMPUTER INC. (“ASUS”).Product warranty or service will not be extended if: (1) the product is repaired, modified or altered, unless such repair, modification of alteration is authorized in writing byASUS; or (2) the serial number of theproduct is defaced or missing.ASUS PROVIDES THIS MANUAL “AS IS” WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE IMPLIED WARRANTIES OR CONDITIONS OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE. IN NO EVENT SHALL ASUS, ITS DIRECTORS, OFFICERS, EMPLOYEES OR AGENTS BE LIABLE FOR ANY INDIRECT, SPECIAL,INCIDENTAL, OR CONSEQUENTIAL DAMAGES (INCLUDING DAMAGES FOR LOSS OF PROFITS, LOSS OF BUSINESS, LOSS OF USE OR DATA, INTERRUPTION OF BUSINESS AND THE LIKE),EVEN IF ASUS HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES ARISING FROMANY DEFECT OR ERROR IN THIS MANUAL OR PRODUCT.SPECIFICATIONS AND INFORMATION CONTAINED IN THIS MANUAL ARE FURNISHED FORINFORMATIONAL USE ONLY, AND ARE SUBJECT TO CHANGE AT ANY TIME WITHOUT NOTICE, AND SHOULD NOT BE CONSTRUED AS A COMMITMENT BY ASUS. ASUS ASSUMES NORESPONSIBILITY OR LIABILITY FOR ANY ERRORS OR INACCURACIES THAT MAY APPEAR INTHIS MANUAL, INCLUDING THE PRODUCTS AND SOFTWARE DESCRIBED IN IT.Products and corporate names appearing in this manual may or may not be registered trademarks orcopyrights of their respective companies, and are used only for identification or explanation nd to theowners’ benefit, without intent to infringe.iiContents Notices (iv)rmation (v)Care.&.Cleaning (vi)Takeback.Services (vii)Chapter.1:.....Product.introduction1.1.Welcome!.......................................................................................1-11.2.Package.contents..........................................................................1-11.3.1 Front view .......................................................................1-21.3.2 Back view ........................................................................1-31.3.3 GamePlus Function ........................................................1-41.3.4 TURBO Function (only for DisplayPort input) .................1-5 Chapter.2:.....Setup2.1.Adjusting.the.monitor...................................................................2-12.2.Detaching.the.arm.(for.VESA.wall.mount)..................................2-22.3.Connecting.the.cables..................................................................2-22.4.Turning.on.the.monitor.................................................................2-3 Chapter.3:.....General.instructions3.1.OSD.(On-Screen.Display).menu..................................................3-13.1.1 How to reconfigure ..........................................................3-13.1.2 OSD function introduction ...............................................3-13.2.Specifications.summary...............................................................3-63.3.Supported.operating.mode..........................................................3-8iiiNoticesmission.StatementThis device complies with Part 15 of the FCC Rules. Operation is subject to the following two conditions:• This device may not cause harmful interference, and• This device must accept any interference received including interference that may cause undesired operation.This equipment has been tested and found to comply with the limits for aClass B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in accordance with manufacturer’s instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:• Reorient or relocate the receiving antenna.• Increase the separation between the equipment and receiver.• Connect the equipment to an outlet on a circuit different from that to which the receiver is connected.• Consult the dealer or an experienced radio/TV technician for help.The use of shielded cables for connection of the monitor to the graphics card isrequired to assure compliance with FCC regulations. Changes or modificationsto this unit not expressly approved by the party responsible for compliancecould void the user’s authority to operate this equipment.As an Energy Star® Partner, our company has determined that thisproduct meets the Energy Star® guidelines for energy efficiency.munications.StatementThis digital apparatus does not exceed the Class B limits for radio noise emissions from digital apparatus set out in the Radio Interference Regulations of theCanadian Department of Communications.This class B digital apparatus complies with Canadian ICES-003.This Class B digital apparatus meets all requirements of the Canadian Interference - Causing Equipment Regulations.Cet appareil numérique de la classe B respecte toutes les exigences du Réglementsur le matériel brouiller du Canada.ivvSafety information•Before setting up the monitor, carefully read all the documentation that came with the package. •To prevent fire or shock hazard, never expose the monitor to rain or moisture. •Never try to open the monitor cabinet. The dangerous high voltages inside the monitor may result in serious physical injury. •If the power supply is broken, do not try to fix it by yourself. Contact a qualified service technician or your retailer. • Before using the product, make sure all cables are correctly connected and the power cables are not damaged. If you detect any damage, contact your dealer immediately.• Slots and openings on the back or top of the cabinet are provided for ventilation. Do not block these slots. Never place this product near or over a radiator or heat source unless proper ventilation is provided.• The monitor should be operated only from the type of power source indicated on the label. If you are not sure of the type of power supply to your home, consult your dealer or local power company.• Use the appropriate power plug which complies with your local power standard. • Do not overload power strips and extention cords. Overloading can result in fire or electric shock.• Avoid dust, humidity, and temperature extremes. Do not place the monitor in any area where it may become wet. Place the monitor on a stable surface. • Unplug the unit during a lightning storm or if it will not be used for a long period of time. This will protect the monitor from damage due to power surges.• Never push objects or spill liquid of any kind into the slots on the monitor cabinet.• To ensure satisfactory operation, use the monitor only with UL listed computers which have appropriate configured receptacles marked between 100-240V AC.• If you encounter technical problems with the monitor, contact a qualified service technician or your retailer.•The adapter is only used for this monitor, do not use it for other purpose. Your device uses one of the following power supplies: - Manufacturer: Delta Electronics Inc., Model: ADP-90YD B / ADP-120RH BThis symbol of the crossed out wheeled bin indicates that the product (electrical, electronic equipment, and mercury-containing button cell battery) should not be placed in municipal waste. Please check local regulations for disposal ofelectronic products.AEEE.yönetmeliğine.uygundurviCare & Cleaning• Before you lift or reposition your monitor, it is better to disconnect the cables and power cord. Follow the correct lifting techniques when positioning the monitor. When lifting or carrying the monitor, grasp the edges of the monitor. Do not lift the display by the stand or the cord.• Cleaning. Turn your monitor off and unplug the power cord. Clean the monitor surface with a lint-free, non-abrasive cloth. Stubborn stains may be removed with a cloth dampened with mild cleaner.•Avoid using a cleaner containing alcohol or acetone. Use a cleaner intended for use with the monitor. Never spray cleaner directly on the screen, as it may drip inside the monitor and cause an electric shock. The.following.symptoms.are.normal.with.the.monitor:• The screen may flicker during the initial use due to the nature of the fluorescent light. Turn off the Power Switch and turn it on again to make sure that the flicker disappears.• You may find slightly uneven brightness on the screen depending on the desktop pattern you use.• When the same image is displayed for hours, an afterimage of the previous screen may remain after switching the image. The screen will recover slowly or you can turn off the Power Switch for hours.•When the screen becomes black or flashes, or cannot work anymore, contact your dealer or service center to fix it. Do not repair the screen by yourself!ed.in.this.guideWARNING: Information to prevent injury to yourself when trying tocomplete a task.CAUTION: Information to prevent damage to the components when tryingto complete a task.IMPORTANT: Information that you MUST follow to complete a task.NOTE: Tips and additional information to aid in completing a task.rmationRefer to the following sources for additional information and for product and software updates.1..ASUS.websitesThe ASUS websites worldwide provide updated information on ASUShardware and software products. Refer to 2..Optional.documentationYour product package may include optional documentation that may havebeen added by your dealer. These documents are not part of the standardpackage.Takeback ServicesASUS recycling and takeback programs come from our commitment to the highest standards for protecting our environment. We believe in providing solutions forour customers to be able to responsibly recycle our products, batteries and other components as well as the packaging materials.Please go to /english/Takeback.htm for detail recycling information in different region.viiviii1.1 Welcome!Thank you for purchasing the ASUS® LCD monitor!The latest widescreen LCD monitor from ASUS provides a broader, brighter and crystal-clear display, plus a host of features that enhance your viewing experience. With these features, you can enjoy the convenience and delightful visual experience that the monitor brings to you!1.2 Package contentsCheck your package for the following items:LCD monitorDriver and Manual discQuick start guideWarranty cardPower adapterPower cordDP cableHDMI cableUSB cableIf any of the above items is damaged or missing, contact your retailerimmediately.Select “ON” when you see the message “LIGHT IN MOTION ON/OFF” appearsif you want to turn on the red light on the base. Select “OFF” if you want it toturn off. If you disable this function but later wish to reactivate it, please usethe OSD menu to turn it on. The monitor is Energy Star 6.0 compatible when“LIGHT IN MOTION” is “OFF”.If no signal is detected for 120 seconds, the monitor automatically enters savingmode.It is recommended that you set the DisplayPort Deep Sleep and HDMI DeepSleep functions to “OFF”.1-1 ASUS PG279Q Series LCD Monitor1-2Chapter 1: Product introduction 1.3 Monitor introduction1.3.1.Front.view1.2. • Exits the OSD menu item.• Turns on the OSD menu when the monitor enters standby mode or displays the “NO SIGNAL“ message.3. button:• GamePlus hotkey. Move the press • Turns on the OSD menu when the monitor enters standby mode or displays the “NO SIGNAL“ message.4. button• TURBO hotkey. Press the button to select among different refresh rates. (Only for DisplayPort input)• Turns on the OSD menu when the monitor enters standby mode or displays the “NO SIGNAL“ message.5.• Turns the monitor on/off.The color definition of the power indicator is as the below table.•1.3.2.Back.viewRear.connectors1..DC-IN.port. This port connects the power cord.2..Earphone.jack. This port is only available when an HDMI/DisplayPort cableis connected.3..DisplayPort. This port is for connection for a DisplayPort compatible device.4..HDMI.port. This port is for connection with an HDMI compatible device.B.3.0.upstream.port. This port is for connection with a USB upstreamcable. The connection enables the USB ports on the monitor.B.3.0.downstream.ports. These ports are for connection with USBdevices, such as USB keyboard/mouse, USB flash drive, etc.7. For service personnel only.8..Kensington.lock.slot.9..Control.buttons.ASUS PG279Q Series LCD Monitor1-31.3.3.GamePlus.FunctionThe GamePlus function provides a toolkit and creates a better gaming environment for users when playing different types of games. In addition, Crosshair function is specially designed for new gamers or beginners interested in First Person Shooter (FPS) games.To active GamePlus:1. Press the GamePlus hotkey.2. Move the3. Press the) button or move thefunction you choose, and move thethrough the settings. Move the4. Highlight the desired setting and press thePress the button to inactivate it.1-4Chapter 1: Product introduction1.3.4.TURBO.Function.(only.for.DisplayPort.input)The TURBO function helps you select among different refresh rates in a convenient way.To active TURBO:Press the TURBO hotkey repeatedly to select.ASUS PG279Q Series LCD Monitor1-51-6Chapter 1: Product introduction2-1ASUS PG279Q Series LCD Monitor 2.1Adjusting the monitor• For optimal viewing, we recommend that you look at the full face of the monitor, then adjust the monitor to the angle that is most comfortable for you.• Hold the stand to prevent the monitor from falling when you change its angle.•The recommended adjusting angle is +20˚ to -5˚ (for tilt)/+60˚ to -60˚ (for swiveling/ +120 mm (for height adjustment)/90˚ (for portrait view).-5° ~ +20°It is normal that the monitor slightly shakes while you adjust the viewing angle.Pivoting.the.monitor 1. Lift the monitor to the highest position.2 Tilt the monitor to its maximum angle.3.Pivot the monitor clockwise to the angle you need.-5° ~ +20°It is normal that the monitor slightly shakes while you adjust the viewing angle.Figure 1Figure 2Figure 32-2Chapter 2: Setup2.2Detaching the arm (for VESA wall mount)The detachable arm of this monitor is specially designed for VESA wall mount. To detach the arm:1. Have the front of the monitor face down on a table.2.Loosen the four screws on the back of the monitor and remove the arm/base.We recommend that you cover the table surface with soft cloth to preventdamage to the monitor.2.3 Connecting the cablesConnect the cables as the following instructions:•.To.connect.the.power.cord :a. Connect the power adapter securely to the monitor’s DC input.b. Connect one end of the power cord to the power adapter and the otherend to a power outlet.•.To.connect.the.DisplayPort/HDMI.cable:a. Plug one end of the DisplayPort cable to the monitor’s DisplayPort/HDMIport.b. Connect the other end of the DisplayPort/HDMI cable to your computer'sDisplayPort port.•e.the.earphone: connect the end with plug type to the monitor’s earphone jack when an HDMI or DisplayPort signal is fed.•B.3.0.ports: Take the supplied USB 3.0 cable, and plug the smaller end (type B) of the USB upstream cable to the monitor’s USBupstream port, and the larger end (type A) to your computer’s USB 3.0 port.Make sure your computer is installed with the lastest Windows 7/Windows 8operating system. That will enable the USB ports on the monitor to work.2.4 Turning on the monitorASUS PG279Q Series LCD Monitor2-32-4Chapter 2: Setup3-1ASUS PG279Q Series LCD Monitor 3.1OSD (On-Screen Display) menu3.1.1.How.to.reconfigure1. Press the2.Move the ) button up/down to navigate through the functions. Highlight the desired function and press the (the function selected has a sub-menu, move the again to navigate through the sub-menu functions. Highlight the desired sub-menu function and press the right to activate it. 3. Move the function.4.To exit and save the OSD menu, press the button or move the ) left repeatedly until the OSD menu disappears. To adjust other functions, repeat steps 1-3.3.1.2.OSD.function.introduction1..Over.ClockingThis function allows you to adjust the refresh rate.• Select “ON” if you want to enable this function.3-2Chapter 3: General Instructions•.Max.Refresh.Rate : After activating this function, you can select one refresh rate to be displayed along with 60 Hz and 120 Hz when pressing the TURBO hotkey (Only for DisplayPort input).After reboot, test the new Max Refresh Rate by enabling it in the NVIDIAControl Panel. If you don’t see an image, disconnect the DP cable and use themonitor OSD to try again with a safer Max Refresh Rate.2..GameVisualThis function contains 6 sub-functions you can select for your preference. Each mode has the Reset selection, allowing you to maintain your setting or return to the preset mode.•.Scenery.Mode : This is the best choice for scenery photo displaying with GameVisual TM Video intelligence Technology.•.Racing.Mode : This is the best choice for racing game playing with GameVisual TM Video intelligence Technology.•.Cinema.Mode : This is the best choice for movie watching with GameVisual TM Video intelligence Technology.•.RTS/RPG.Mode : This is the best choice for Real-Time Strategy (RTS)/Role-Playing Game (RPG) playing with GameVisual TM Video intelligence Technology.•.FPS.Mode : This is the best choice for First Person Shooter game playing with GameVisual TM Video intelligence Technology.•.sRGB.Mode : This is the best choice for viewing photos and graphics from PCs.• In the Racing mode, the following function(s) are not user-configurable: Saturation.• In the sRGB mode, the following function(s) are not user-configurable: Saturation, Color Temp., Brightness, Contrast.3..Blue.Light.FilterIn this function, you can adjust the blue light filter level.•.Level.0:.No change.•.Level.1~4: The higher the level, the less blue light is scattered.When Blue Light Filter is activated,the default settings of Racing Modewill be automatically imported. Between Level 1 to Level 3, the Brightnessfunction is user-configurable. Level 4 is optimized setting. It is compliancewith TUV Low Blue Light Certification. The Brightness function is not user-configurable.4..ColorYou can adjust Brightness, Contrast, Saturation and Color temperature from this menu.•.Brightness: the adjusting range is from 0 to 100.•.Contrast: the adjusting range is from 0 to 100.•.Saturation: The adjusting range is from 0 to 100.•.Color.Temp.: contains 4 modes including Cool, Normal, Warm, and User Mode.5..Image.You can adjust OD and ULMB from this menu.•.OD: Improves the gray level response time of the LCD panel.•.ULMB.(Ultra Low Motion Blur) (only for DisplayPort input): Adjusts the level of motion blur reduction. This function is available when the refreshrate is 85Hz, 100Hz or 120Hz.6..Input.Select.In this function, you can select your desired input source.7..System.Setup.Allows you to adjust the system.•.Language: There are 21 languages for your selection, including English, French, German, Italian, Spanish, Dutch, Portuguese, Russian, Czech,Croatian, Polish, Romanian, Hungarian, Turkish, Simplified Chinese,Traditional Chinese, Japanese, Korean, Thai, Indonesia, Persian.•.OSD.Position: Adjusts the horizontal position (H-Position)/the vertical position (V-Position) of the OSD.•.Transparency: Adjusts the OSD background from opaque to transparent.•.OSD.Timeout: Adjusts the OSD timeout from 10 to 120 seconds.•.Keylock: To disable all function keys. Press over 5 seconds to cancel the key lock function.•.Information: Shows the monitor information.•.LIGHT.IN.MOTION: Select“ON” if you want to turn on the red light on the base.•.Sound:*.Volume: the adjusting range is from 0 to 100.*.Mute: toggles the monitor sound between on and off.•.All.Reset: “Yes” allows you to restore the default settings.•.DisplayPort.Deep.Sleep: puts the DisplayPort port into deep sleep.•.HDMI.Deep.Sleep: puts the HDMI port into deep sleep.In order to be Energy Star compliant, the default setting for DisplayPort DeepSleep and HDMI Deep Sleep is “On”.If the monitor cannot wake up after going into deep sleep, do one of thefollowings:3.2 Specifications summary*Specifications are subject to change without notice.3.3 Troubleshooting (FAQ)3.4 Supported operating modeHDMI inputNote:Do not support interlace.DisplayPort inputNote:Do not support interlace.G-SYNC (only for DisplayPort input) supported NVIDIA GPUs: GeForce GTX TITAN X, GeForce GTX 980 Ti, GeForce GTX 980, GeForce GTX 970, GeForce GTX 960, GeForce GTX TITAN Z, GeForce GTX TITAN Black, GeForce GTX TITAN, GeForce GTX 780 Ti, GeForce GTX 780, GeForce GTX 770, GeForce GTX 760, GeForce GTX 750 Ti, GeForce GTX 750, GeForce GTX 745 (OEM), GeForce GTX 690, GeForce GTX 680, GeForce GTX 670, GeForce GTX 660 Ti, GeForce GTX 660, GeForce GTX 650 Ti BOOST. For other GPUs, please contact the manufactures to see if they are compatible.DisplayPort.input--Over.clockingNote:.Do.not.support.interlace.Over.Clocking.supported.GPUs:.NVIDIA.Maxwell.GPU.Graphics.Card.like.GTX745,.GTX750,.GTX750. Ti,.GTX.960,.GTX970,.GTX980,.GTX980.Ti.and.GTX.Titan.X..For.other.GPUs,.please.contact.the. patible.The.monitor.is.purposely.supporting.the.NVIDIA.G-SYNC.technology.and.targeting.NVIDIA.graphics. solutions..Please.note.that.Over.Clocking.function/performance.depends.on.the.GPUs.or.contents.displayed.. ASUS.only.provides.this.function..The.performance.or.any.side.effect.after.activation.is.not. guaranteed...。
海尔 LED数码显示器产品说明书
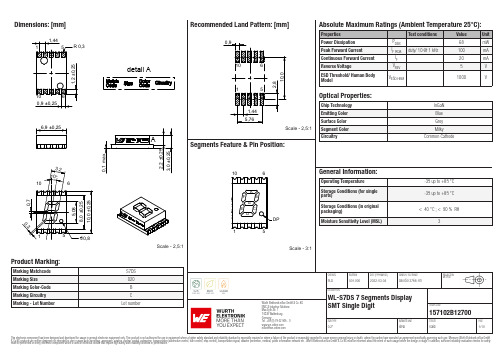
Dimensions: [mm]detail AScale - 2,5:1157102B12700Schematic:157102B12700157102B12700157102B12700157102B12700BC157102B12700T e m p e r a t u r eT pT L157102B12700Cautions and Warnings:The following conditions apply to all goods within the product series of Optoelectronic Components of Würth Elektronik eiSos GmbH & Co. KG:General:•This optoelectronic component is designed and manufactured for use in general electronic equipment.•Würth Elektronik must be asked for written approval (following the PPAP procedure) before incorporating the components into any equipment in fields such as military, aerospace, aviation, nuclear control, submarine, transportation (automotive control, train control, ship control), transportation signal, disaster prevention, medical, public information network, etc. where higher safety and reliability are especially required and/or if there is the possibility of direct damage or human injury.•Optoelectronic components that will be used in safety-critical or high-reliability applications, should be pre-evaluated by the customer. •The optoelectronic component is designed and manufactured to be used within the datasheet specified values. If the usage and operation conditions specified in the datasheet are not met, the wire insulation may be damaged or dissolved.•Do not drop or impact the components, the component may be damaged•Würth Elektronik products are qualified according to international standards, which are listed in each product reliability report. Würth Elektronik does not warrant any customer qualified product characteristics beyond Würth Elektroniks’ specifications, for its validity and sustainability over time.•The responsibility for the applicability of the customer specific products and use in a particular customer design is always within the authority of the customer. All technical specifications for standard products also apply to customer specific products.Product specific:Soldering:•The solder profile must comply with the technical product specifications. All other profiles will void the warranty.•All other soldering methods are at the customers’ own risk.Cleaning and Washing:•Washing agents used during the production to clean the customer application might damage or change the characteristics of the optoelectronic component body, marking or plating. Washing agents may have a negative effect on the long-term functionality of the product.•Using a brush during the cleaning process may break the optoelectronic component body. Therefore, we do not recommend using a brush during the PCB cleaning process.Potting:•If the product is potted in the customer application, the potting material might shrink or expand during and after hardening. Shrinking could lead to an incomplete seal, allowing contaminants into the optoelectronic component body, pins or termination. Expansion could damage the components. We recommend a manual inspection after potting to avoid these effects.Storage Conditions:• A storage of Würth Elektronik products for longer than 12 months is not recommended. Within other effects, the terminals may suffer degradation, resulting in bad solderability. Therefore, all products shall be used within the period of 12 months based on the day of shipment.•Do not expose the optoelectronic component to direct sunlight.•The storage conditions in the original packaging are defined according to DIN EN 61760-2.•For a moisture sensitive component, the storage condition in the original packaging is defined according to IPC/JEDEC-J-STD-033. It is also recommended to return the optoelectronic component to the original moisture proof bag and reseal the moisture proof bag again. •The storage conditions stated in the original packaging apply to the storage time and not to the transportation time of the components. Packaging:•The packaging specifications apply only to purchase orders comprising whole packaging units. If the ordered quantity exceeds or is lower than the specified packaging unit, packaging in accordance with the packaging specifications cannot be ensured. Handling:•Violation of the technical product specifications such as exceeding the nominal rated current, will void the warranty.•The product design may influence the automatic optical inspection.•Certain optoelectronic component surfaces consist of soft material. Pressure on the top surface has to be handled carefully to prevent negative influence to the function and reliability of the optoelectronic components.•ESD prevention methods need to be applied for manual handling and processing by machinery.•Resistors for protection are obligatory.•Luminaires in operation may harm human vision or skin on a photo-biological level. Therefore direct light impact shall be avoided. All products are additionally certified as risk groups 0 to 2 according to DIN EN 62471:2008.•In addition to optoelectronic components testing, products incorporating these devices have to comply with the safety precautions given in IEC 60825-1, IEC 62471 and IEC 62778•Please be aware that Products provided in bulk packaging may get bent and might lead to derivations from the mechanical manufacturing tolerances mentioned in our datasheet, which is not considered to be a material defect.Technical specification:•The typical and/or calculated values and graphics of technical parameters can only reflect statistical figures. The actual parameters of each single product, may differ from the typical and/or calculated values or the typical characteristic line.•On each reel, only one bin is sorted and taped. The bin is defined on intensity, chromaticity coordinate or wavelength and forwardWürth Elektronik eiSos GmbH & Co. KGEMC & Inductive SolutionsMax-Eyth-Str. 174638 WaldenburgGermanyCHECKED REVISION DATE (YYYY-MM-DD)GENERAL TOLERANCE PROJECTIONMETHODPLD001.0002022-03-04DIN ISO 2768-1mDESCRIPTIONWL-S7DS 7 Segments DisplaySMT Single Digit ORDER CODE157102B12700SIZE/TYPE BUSINESS UNIT STATUS PAGEvoltage.•In order to ensure highest availability, the reel binning of standard deliveries can vary. A single bin cannot be ordered. Please contact us in advance, if you need a particular bin sorting before placing your order.•Test conditions are measured at the typical current with pulse duration < 30ms. •Wavelength tolerance under measurement conditions ± 2nm. •Optical intensity tolerance under measurement conditions ±15%. •Forward voltage tolerance under measurement conditions ± 0.2V.These cautions and warnings comply with the state of the scientific and technical knowledge and are believed to be accurate and reliable.However, no responsibility is assumed for inaccuracies or incompleteness.Würth Elektronik eiSos GmbH & Co. KG EMC & Inductive Solutions Max-Eyth-Str. 174638 Waldenburg GermanyCHECKED REVISION DATE (YYYY-MM-DD)GENERAL TOLERANCEPROJECTION METHODPLD001.0002022-03-04DIN ISO 2768-1mDESCRIPTIONWL-S7DS 7 Segments Display SMT Single DigitORDER CODE157102B12700SIZE/TYPEBUSINESS UNITSTATUSPAGEImportant NotesThe following conditions apply to all goods within the product range of Würth Elektronik eiSos GmbH & Co. KG:1. General Customer ResponsibilitySome goods within the product range of Würth Elektronik eiSos GmbH & Co. KG contain statements regarding general suitability for certain application areas. These statements about suitability are based on our knowledge and experience of typical requirements concerning the areas, serve as general guidance and cannot be estimated as binding statements about the suitability for a customer application. The responsibility for the applicability and use in a particular customer design is always solely within the authority of the customer. Due to this fact it is up to the customer to evaluate, where appropriate to investigate and decide whether the device with the specific product characteristics described in the product specification is valid and suitable for the respective customer application or not.2. Customer Responsibility related to Specific, in particular Safety-Relevant ApplicationsIt has to be clearly pointed out that the possibility of a malfunction of electronic components or failure before the end of the usual lifetime cannot be completely eliminated in the current state of the art, even if the products are operated within the range of the specifications.In certain customer applications requiring a very high level of safety and especially in customer applications in which the malfunction or failure of an electronic component could endanger human life or health it must be ensured by most advanced technological aid of suitable design of the customer application that no injury or damage is caused to third parties in the event of malfunction or failure of an electronic component. Therefore, customer is cautioned to verify that data sheets are current before placing orders. The current data sheets can be downloaded at .3. Best Care and AttentionAny product-specific notes, cautions and warnings must be strictly observed. Any disregard will result in the loss of warranty.4. Customer Support for Product SpecificationsSome products within the product range may contain substances which are subject to restrictions in certain jurisdictions in order to serve specific technical requirements. Necessary information is available on request. In this case the field sales engineer or the internal sales person in charge should be contacted who will be happy to support in this matter.5. Product R&DDue to constant product improvement product specifications may change from time to time. As a standard reporting procedure of the Product Change Notification (PCN) according to the JEDEC-Standard inform about minor and major changes. In case of further queries regarding the PCN, the field sales engineer or the internal sales person in charge should be contacted. The basic responsibility of the customer as per Section 1 and 2 remains unaffected.6. Product Life CycleDue to technical progress and economical evaluation we also reserve the right to discontinue production and delivery of products. As a standard reporting procedure of the Product Termination Notification (PTN) according to the JEDEC-Standard we will inform at an early stage about inevitable product discontinuance. According to this we cannot guarantee that all products within our product range will always be available. Therefore it needs to be verified with the field sales engineer or the internal sales person in charge about the current product availability expectancy before or when the product for application design-in disposal is considered. The approach named above does not apply in the case of individual agreements deviating from the foregoing for customer-specific products.7. Property RightsAll the rights for contractual products produced by Würth Elektronik eiSos GmbH & Co. KG on the basis of ideas, development contracts as well as models or templates that are subject to copyright, patent or commercial protection supplied to the customer will remain with Würth Elektronik eiSos GmbH & Co. KG. Würth Elektronik eiSos GmbH & Co. KG does not warrant or represent that any license, either expressed or implied, is granted under any patent right, copyright, mask work right, or other intellectual property right relating to any combination, application, or process in which Würth Elektronik eiSos GmbH & Co. KG components or services are used.8. General Terms and ConditionsUnless otherwise agreed in individual contracts, all orders are subject to the current version of the “General Terms and Conditions of Würth Elektronik eiSos Group”, last version available at .Würth Elektronik eiSos GmbH & Co. KGEMC & Inductive SolutionsMax-Eyth-Str. 174638 WaldenburgGermanyCHECKED REVISION DATE (YYYY-MM-DD)GENERAL TOLERANCE PROJECTIONMETHODPLD001.0002022-03-04DIN ISO 2768-1mDESCRIPTIONWL-S7DS 7 Segments DisplaySMT Single Digit ORDER CODE157102B12700SIZE/TYPE BUSINESS UNIT STATUS PAGE。
Dell UltraSharp U2419HS U2719DS 显示器用户指南说明书
型号:U2419HS/U2719DS认证型号:U2419HSt/U2719DStDell UltraSharpU2419HS/U2719DS Dell Display Manager 用户指南注:“注”表示可以帮助您更好地使用您的产品的重要信息。
版权所有 © 2018 Dell Inc.或其子公司。
保留所有权利。
Dell、EMC以及其他商标是Dell Inc.或其子公司的商标。
其他商标可能是其各自所有者的商标。
2018 – 12Rev. A00目录概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4使用快速设置对话框 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5设置基本显示功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6为应用程序指派预设模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8使用Easy Arrange组织窗口 (10)管理多个视频输入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13恢复应用程序位置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15应用节能功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16故障排除 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17目录 | 3概述Dell Display Manager是一个Microsoft Windows应用程序,可管理一台或一组显示器。
Philips 279C9 4K UHD USB-C 显示器说明书

Philips ModaLCD monitor with USB-Cdocking ArrayC Line27" (68.47 cm)3840 x 2160 (4K UHD)279C9Concise design, completein every detailThe Philips award-winning monitor gives crisp 4K and lifelike visuals with DisplayHDR 400certified. Trimmed with all ports, one-cable USB-C and simple cable management designfor a clean set-up. SmartErgo base for ergonomic adjustments.Superb Design•Zero Bezel for a full picture and modern look•Cable management reduces cable clutter for a neat workspaceSingle cable USB-C connection•Connect your notebook with one USB-C cable•Power and re-charge compatible notebook from the monitorSuperb Picture Quality•UltraClear 4K UHD (3840 x 2160) resolution for precision•IPS LED wide view technology for image and colour accuracy•Effortlessly smooth gameplay with AMD FreeSync™ technology•DisplayHDR 400 for more lifelike and outstanding visualsDesigned for comfortable productivity•SmartErgoBase enables user-friendly ergonomic adjustments•LowBlue Mode for easy-on-the-eyes productivity•Less eye fatigue with Flicker-Free technologyHighlightsZero BezelEliminating the surrounding frame in our Zero Bezel design offers an expansive picture with a modern look and a virtually seamless experience for multi-monitor setups.Cable managementCable management is an intimate design that maintains a tidy workspace by organising the cables and wires required for the operation of a display device.USB-C connectionThis Philips display features a USB type-C connector with power delivery. Withintelligent and flexible power management, you can power charge your compatible device directly. Its slim, reversible USB-C allows for easy, one-cable connection. You can watch high-resolution video and transfer data at super speed, while powering up and recharging your compatible device at the same time.Power and re-charge notebook This monitor features a built-in USB-C connector that meets USB Power Delivery standard. With intelligent and flexible power management, you can now power up and/or re-charge your compatible* Notebook directly from the Monitor using a single USB-C cable.UltraClear 4K UHD ResolutionThese Philips displays utilise high-performance panels to deliver UltraClear, 4K UHD (3840 x 2160) resolution images. Whether you are a demanding professional requiring extremely detailed images for CAD solutions, a user of 3D graphics applications or a financial wizard working on huge spreadsheets, Philips displays will make your images and graphics come alive.IPS technologyIPS displays use an advanced technology that gives you extra-wide viewing angles of 178/178 degrees, making it possible to view the display from almost any angle. Unlike standard TN panels, IPS displays give you remarkably crisp images with vivid colours, making them ideal not only for Photos, movies and web browsing, but also for professional applications that demand colour accuracy and consistent brightness at all times.Ultra-smooth gamingGaming shouldn't be a choice between choppy gameplay or broken frames. With the new Philips monitor it doesn't have to be. Get fluid, artefact-free performance at virtually any frame rate with AMD FreeSync™ technology, smooth, quick refresh and ultra-fast response time.DisplayHDR 400VESA-certified DisplayHDR 400 delivers a significant step up from normal SDR displays. Unlike, other "HDR-compatible" screens, true DisplayHDR 400 produces astonishingbrightness, contrast and colours. With global dimming and peak brightness up to 400 nits, images come to life with notable highlights while featuring deeper, more nuanced blacks. It renders a fuller palette of rich new colours, delivering a visual experience that engagesyour senses.iF DesigniF DESIGN AWARD is a seal of quality forexceptional design and a symbol that consumers can trust.Philips 279C9 4K frameless monitor with a unique tilt, swivel, height-adjustable and pivot system that provides maximum userflexibility.Issue date 2023-04-07 Version: 6.0.112 NC: 8670 001 66311 EAN: 87 12581 76575 0© 2023 Koninklijke Philips N.V.All Rights reserved.Specifications are subject to change without notice. Trademarks are the property of Koninklijke Philips N.V. or their respective owners.SpecificationsPicture/Display•LCD panel type: IPS technology•Backlight type: W-LED system•Panel Size: 27"/68.47 cm•Display Screen Coating: Anti-Glare, 3H, Haze 25%•Effective viewing area: 596.74 (H) x 335.66 (V)•Aspect ratio: 16:9•Maximum resolution: 3840 x 2160 @ 60 Hz •Pixel Density: 163 PPI•Response time (typical): 5 ms (Grey to Grey)*•Brightness: 400 cd/m²•Contrast ratio (typical): 1300:1•SmartContrast: Mega Infinity DCR•Pixel pitch: 0.1554 x 0.1554 mm•Viewing angle: 178º (H)/178º (V), @ C/R > 10•Picture enhancement: SmartImage game •Colour gamut (typical): NTSC 90.7%*, sRGB 109%*•HDR: DisplayHDR 400 certified•Display colours: Colour support 1.07 billion colours•Scanning Frequency: 30 - 140 kHz (H) / HDMI: 40 - 60 Hz (V); DP: 23 - 75 Hz (V)•Flicker-free•LowBlue Mode•EasyRead•SmartUniformity: 97 ~ 102%•Delta E:<2•sRGB•AMD FreeSync™ technologyConnectivity•Signal Input: DisplayPort 1.4 x 1, HDMI 2.0 x 2•USB:: USB-C x 1, USB 3.2 x 4 (downstream with 2 fast charge B.C 1.2; Power delivery up to 65 W)•Sync Input: Separate Sync•Audio (In/Out): Headphone outUSB•USB-C: Reversible plug connector•Super speed: Data and Video transfer•DP: Built-in Display Port Alt mode•Power delivery: USB PD version 3.0•USB-C max. power delivery: Up to 65 W (5 V/3 A;7 V/3 A; 9 V/3 A; 10 V/3 A;12 V/3 A; 15 V/3 A; 20 V/3.25 A)Convenience•User convenience: Power On/Off, Menu, Input, SmartImage Game, Brightness•Control software: SmartControl•OSD Languages: Brazil Portuguese, Czech, Dutch, English, Finnish, French, German, Greek, Hungarian, Italian, Japanese, Korean, Polish, Portuguese, Russian, Simplified Chinese, Spanish, Swedish, Traditional Chinese, Turkish, Ukrainian •Other convenience: Kensington lock, VESA mount (100 x 100 mm)•Plug and Play Compatibility: DDC/CI, Mac OS X, sRGB, Windows 10 / 8.1 / 8 / 7Stand•Height adjustment: 130 mm•Pivot: 90 degree•Swivel:+/-175 degree•Tilt: -5/20 degreePower•On mode: 25.72 W (typ.) (EnergyStar testmethod)•Standby mode: 0.5 W•Off mode: 0.3 W•Energy Label Class: F•Power LED indicator: Operation - White, Standbymode - White (flashing)•Power supply: External, 100–240 VAC, 50–60 HzDimensions•Product with stand (max height):612 x 527 x 218 mm•Product without stand (mm): 612 x 353 x 39 mm•Packaging in mm (W x H x D):680 x 545 x 150 mmWeight•Product with stand (kg): 5.85 kg•Product without stand (kg): 4.25 kg•Product with packaging (kg): 8.41 kgOperating conditions•Temperature range (operation): 0 to 40 °C•Temperature range (storage): -20 to 60 °C•Relative humidity: 20%-80 %•Altitude: Operation: +12,000 ft (3658 m), Non-operation: +40,000 ft (12,192 m)•MTBF: 50,000 hrs (Excluding backlight) hour(s)Sustainability•Environmental and energy: EnergyStar 8.0, TCOCertified, RoHS•Recyclable packaging material: 100 %•Specific Substances: Mercury free, PVC/BFR freehousingCompliance and standards•Regulatory Approvals: CB, FCC Class B, ICES-003,CE Mark, TUV/ISO9241-307, TUV-BAUART, CU-EAC, EAEU RoHS, UKRAINIAN, CCC, CECP,CELCabinet•Colour: Black•Finish: TexturedWhat's in the box?•Monitor with stand•Cables: HDMI cable, DP cable, USB-C to C/Acable, Power cable•User Documentation*"IPS" word mark / trademark and related patents on technologiesbelong to their respective owners.*Response time value equal to SmartResponse*NTSC Area based on CIE 1976*sRGB Area based on CIE1931*2020 Advanced Micro Devices, Inc. All rights reserved. AMD, theAMD Arrow logo, AMD FreeSync™ and combinations thereof aretrademarks of Advanced Micro Devices, Inc. Other product namesused in this publication are for identification purposes only and maybe trademarks of their respective companies.*For USB-C power and charging function, your Notebook/devicemust support USB-C standard Power Delivery specifications. Pleasecheck with your Notebook user manual or manufacturer for moredetails.*The monitor may look different from feature images.。
HP L2105tm 2209t 液晶触摸显示器 说明书
要鉴别此产品,请参阅产品上的部件号、序列号或型号。
适用于加拿大的注意事项
此 B 类数字装置符合“加拿大干扰产生设备规程”的所有要求。
Avis Canadien
Cet appareil numérique de la classe B respecte matérielbrouilleur du Canada.
toutes les exige nces du R èglement sur le
适用于日本的注意事项
适用于韩国的注意事项
电源线配件要求
此显示器的电源具有自动线路变换(Automatic Line Switching, ALS)功能。由于该特性,显示器可在输入 电压为 100 到 120V 或者 200 到 240V 之间时运行。随显示器提供的电源线配件(软电线或墙上插头)均 符合设备购买国家/地区的使用要求。如果您需要在其他国家/ 地区使用的电源线,则应购买该国家/ 地 区认可的电源线。电源线必须符合产品要求,并且能够承载本产品的电气额定值标签上所标示的电压和 电流值。电源线的电压和电流额定值必须大于本产品上所标示的电压和电流额定值。此外,电线的截面 面积必须大于 0.75 平方毫米或 18AWG,而电源线的长度必须在 1.8 米(6 英尺)与 3.6 米(12 英尺)之间。 如果您对使用的电源线类型有任何疑问,请与 HP 的授权服务提供商联系。电源线应当稳妥布局,以免 被踩到或受到其他物体挤压。应特别注意插头、电气插座以及电源线与本产品的连接点。
化学物质
HP 公司承诺按照欧洲议会和理事会第 1907/2006 号欧盟法规(REACH)等法律法规的要求,为客户提供 我们产品中使用的化学物质的信息。您可以点击 http/go/reach 查阅该产品的化学信息报告。
MEMORY存储芯片TNY279PNR中文规格书
This Product is Covered by Patents and/or Pending Patent Applications.Output Power TableProduct 3230 VAC ± 15%85-265 VAC Adapter 1Peak or Open Frame 2Adapter 1Peak or Open Frame 2TNY274P/G 6 W 11 W 5 W 8.5 W TNY275P/G 8.5 W 15 W 6 W 11.5 W TNY276P/G 10 W 19 W 7 W 15 W TNY277P/G 13 W 23.5 W 8 W 18 W TNY278P/G 16 W 28 W 10 W 21.5 W TNY279P/G 18 W 32 W 12 W 25 W TNY280P/G20 W36.5 W14 W28.5 WTable 1. Output Power Table. Notes:1.Minimum continuous power in a typical non-ventilated enclosed adaptermeasured at +50 °C ambient. Use of an external heat sink will increase power capability.2.Minimum peak power capability in any design or minimum continuous power in an open frame design (see Key Applications Considerations).3.Packages: P: DIP-8C, G: SMD-8C. See Part Ordering Information.Product HighlightsLowest System Cost with Enhanced Flexibility•Simple ON/OFF control, no loop compensation needed •Selectable current limit through BP/M capacitor value • Higher current limit extends peak power or, in open frame applications, maximum continuous power •Lower current limit improves efficiency in enclosed adapters/chargers•Allows optimum TinySwitch-III choice by swapping devices with no other circuit redesign•Tight I 2f parameter tolerance reduces system cost •Maximizes MOSFET and magnetics power delivery •Minimizes max overload power, reducing cost oftransformer, primary clamp & secondary components•ON-time extension – extends low line regulation range/hold-up time to reduce input bulk capacitance•Self-biased: no bias winding or bias components •Frequency jittering reduces EMI filter costs •Pin-out simplifies heatsinking to the PCB•SOURCE pins are electrically quiet for low EMIEnhanced Safety and Reliability Features•Accurate hysteretic thermal shutdown protection with automatic recovery eliminates need for manual reset•Improved auto-restart delivers <3% of maximum power in short-circuit and open loop fault conditions•Output overvoltage shutdown with optional Zener•Line undervoltage detect threshold set using a single optional resistor•Very low component count enhances reliability and enables single-sided printed circuit board layout•High bandwidth provides fast turn on with no overshoot and excellent transient load response•Extended creepage between DRAIN and all other pins improves field reliability EcoSmart ™– Extremely Energy Efficient•Easily meets all global energy efficiency regulations•No-load <150 mW at 265 VAC without bias winding, <50 mW with bias winding•ON/OFF control provides constant efficiency down to very light loads – ideal for mandatory CEC regulations and 1 W PC standby requirements Applications•Chargers/adapters for cell/cordless phones, PDAs, digital cameras, MP3/portable audio, shavers, etc.•PC Standby and other auxiliary supplies•DVD/PVR and other low power set top decoders•Supplies for appliances, industrial systems, metering, etc.DescriptionTinySwitch™-III incorporates a 700 V power MOSFET, oscillator, high-voltage switched current source, current limit (userselectable) and thermal shutdown circuitry. The IC family uses an ON/OFF control scheme and offers a design flexible solution with a low system cost and extended power capability.Figure 1. Typical Standby Application.PI-4095-082205Wide-Range High-Voltage DC InputDSEN/UV BP/MDC OutputTinySwitch-III++TNY274-280Pin Functional DescriptionDRAIN (D) Pin:This pin is the power MOSFET drain connection. It provides internal operating current for both start-up and steady-state operation.BYPASS/MULTI-FUNCTION (BP/M) Pin:This pin has multiple functions:1.It is the connection point for an external bypass capacitor forthe internally generated 5.85 V supply.2.It is a mode selector for the current limit value, depending onthe value of the capacitance added. Use of a 0.1 m Fcapacitor results in the standard current limit value. Use of a 1 m F capacitor results in the current limit being reduced to that of the next smaller device size. Use of a 10 m F capacitor results in the current limit being increased to that of the next larger device size for TNY275-280.3.It provides a shutdown function. When the current into thebypass pin exceeds I SD , the device latches off until theBP/M voltage drops below 4.9 V , during a power down. This can be used to provide an output overvoltage function with a Zener connected from the BP/M pin to a bias winding supply.ENABLE/UNDERVOLTAGE (EN/UV) Pin:This pin has dual functions: enable input and line undervoltage sense. During normal operation, switching of the power MOSFET is controlled by this pin. MOSFET switching isterminated when a current greater than a threshold current is drawn from this pin. Switching resumes when the current beingFigure 2. Functional Block Diagram.PI-4077-072115CLOCKOSCILLATOR5.85 V 4.9 V SOURCE(S)SR QDC MAX BYPASS/MULTI-FUNCTION(BP/M)+-V ILIMITFAULT PRESENTCURRENT LIMIT COMPARATORENABLELEADING EDGE BLANKINGTHERMAL SHUTDOWN+-DRAIN (D)REGULATOR5.85 VBYPASS PINUNDER-VOLTAGE1.0 V + V TENABLE/UNDER-VOLTAGE (EN/UV)Q115 µA25 µALINE UNDER-VOLTAGERESETAUTO-RESTART COUNTERJITTER 1.0 V6.4 VBYPASSCAPACITORSELECT ANDCURRENTLIMIT STATE MACHINEOVP LATCHFigure 3. Pin Configuration.PI-4078-080905D SBP/MS S EN/UV P Package (DIP-8C)G Package (SMD-8C)857142S 6TNY274-280pulled from the pin drops to less than a threshold current. A modulation of the threshold current reduces group pulsing. The threshold current is between 75 m A and 115 m A.The EN/UV pin also senses line undervoltage conditions through an external resistor connected to the DC line voltage. If there is no external resistor connected to this pin, TinySwitch-III detects its absence and disables the line undervoltage function.SOURCE (S) Pin:This pin is internally connected to the output MOSFET source for high-voltage power return and control circuit common.TinySwitch-III Functional DescriptionTinySwitch-III combines a high-voltage power MOSFET switch with a power supply controller in one device. Unlike conventional PWM (pulse width modulator) controllers, it uses a simple ON/OFF control to regulate the output voltage.The controller consists of an oscillator, enable circuit (sense and logic), current limit state machine, 5.85 V regulator, BYPASS/MULTI-FUNCTION pin undervoltage, overvoltage circuit, and current limit selection circuitry, over-temperature protection, current limit circuit, leading edge blanking, and a 700 V power MOSFET. TinySwitch-III incorporates additional circuitry for line undervoltage sense, auto-restart, adaptive switching cycle on-time extension, and frequency jitter. Figure 2 shows the functional block diagram with the most important features.OscillatorThe typical oscillator frequency is internally set to an average of 132 kHz. Two signals are generated from the oscillator: the maximum duty cycle signal (DC MAX ) and the clock signal that indicates the beginning of each cycle.The oscillator incorporates circuitry that introduces a small amount of frequency jitter, typically 8 kHz peak-to-peak, to minimize EMI emission. The modulation rate of the frequency jitter is set to 1 kHz to optimize EMI reduction for both average and quasi-peak emissions. The frequency jitter should bemeasured with the oscilloscope triggered at the falling edge of the DRAIN waveform. The waveform in Figure 4 illustrates the frequency jitter.Enable Input and Current Limit State MachineThe enable input circuit at the EN/UV pin consists of a low impedance source follower output set at 1.2 V. The current through the source follower is limited to 115 m A. When thecurrent out of this pin exceeds the threshold current, a low logic level (disable) is generated at the output of the enable circuit, until the current out of this pin is reduced to less than the threshold current. This enable circuit output is sampled at the beginning of each cycle on the rising edge of the clock signal. If high, the power MOSFET is turned on for that cycle (enabled). If low, the power MOSFET remains off (disabled). Since thesampling is done only at the beginning of each cycle, subsequent changes in the EN/UV pin voltage or current during the remainder of the cycle are ignored.The current limit state machine reduces the current limit by discrete amounts at light loads when TinySwitch-III is likely to switch in the audible frequency range. The lower current limit raises the effective switching frequency above the audio range and reduces the transformer flux density, including the associated audible noise. The state machine monitors thesequence of enable events to determine the load condition and adjusts the current limit level accordingly in discrete amounts.Under most operating conditions (except when close to no-load), the low impedance of the source follower keeps the voltage on the EN/UV pin from going much below 1.2 V in the disabled state. This improves the response time of the optocoupler that is usually connected to this pin.5.85 V Regulator and6.4 V Shunt Voltage ClampThe 5.85 V regulator charges the bypass capacitor connected to the BYPASS pin to 5.85 V by drawing a current from the voltage on the DRAIN pin whenever the MOSFET is off. The BYPASS/MULTI-FUNCTION pin is the internal supply voltage node. When the MOSFET is on, the device operates from the energy stored in the bypass capacitor. Extremely low power consumption of the internal circuitry allows TinySwitch-III to operate continuously from current it takes from the DRAIN pin. A bypass capacitor value of 0.1 m F is sufficient for both high frequency decoupling and energy storage.In addition, there is a 6.4 V shunt regulator clamping the BYPASS/MULTI-FUNCTION pin at 6.4 V when current is provided to the BYPASS/MULTI-FUNCTION pin through an external resistor. This facilitates powering of TinySwitch-III externally through a bias winding to decrease the no-load consumption to well below 50 mW.BYPASS/MULTI-FUNCTION Pin UndervoltageThe BYPASS/MULTI-FUNCTION pin undervoltage circuitry disables the power MOSFET when the BYPASS/MULTI-FUNCTION pin voltage drops below 4.9 V in steady state operation. Once the BYPASS/MULTI-FUNCTION pin voltage drops below 4.9 V in steady state operation, it must rise back to 5.85 V to enable (turn-on) the power MOSFET.Figure 4. Frequency Jitter.6000510136 kHz 128 kHzV DRAINTime (µs)P I -2741-04190150040030020010004TNY274-280Over Temperature ProtectionThe thermal shutdown circuitry senses the die temperature. The threshold is typically set at 142 °C with 75 °C hysteresis. When the die temperature rises above this threshold the power MOSFET is disabled and remains disabled until the dietemperature falls by 75 °C, at which point it is re-enabled. A large hysteresis of 75 °C (typical) is provided to prevent over-heating of the PC board due to a continuous fault condition.Current LimitThe current limit circuit senses the current in the power MOSFET. When this current exceeds the internal threshold(I LIMIT ), the power MOSFET is turned off for the remainder of that cycle. The current limit state machine reduces the current limit threshold by discrete amounts under medium and light loads.The leading edge blanking circuit inhibits the current limit comparator for a short time (t LEB ) after the power MOSFET is turned on. This leading edge blanking time has been set so that current spikes caused by capacitance and secondary-side rectifier reverse recovery time will not cause premature termination of the switching pulse.Auto-RestartIn the event of a fault condition such as output overload, output short-circuit, or an open loop condition, TinySwitch-III enters into auto-restart operation. An internal counter clocked by the oscillator is reset every time the EN/UV pin is pulled low. If the EN/UV pin is not pulled low for 64 ms, the power MOSFET switching is normally disabled for 2.5 seconds (except in the case of line undervoltage condition, in which case it is disabled until the condition is removed). The auto-restart alternately enables and disables the switching of the power MOSFET until the fault condition is removed. Figure 5 illustrates auto-restart circuit operation in the presence of an output short-circuit.In the event of a line undervoltage condition, the switching of the power MOSFET is disabled beyond its normal 2.5 seconds until the line undervoltage condition ends.Adaptive Switching Cycle On-Time ExtensionAdaptive switching cycle on-time extension keeps the cycle on until current limit is reached, instead of prematurely terminating after the DC MAX signal goes low. This feature reduces theminimum input voltage required to maintain regulation, extending hold-up time and minimizing the size of bulk capacitor required. The on-time extension is disabled during the start-up of the power supply, until the power supply output reaches regulation.Line Undervoltage Sense CircuitThe DC line voltage can be monitored by connecting an external resistor from the DC line to the EN/UV pin. During power up or when the switching of the power MOSFET is disabled in auto-restart, the current into the EN/UV pin must exceed 25 m A to initiate switching of the power MOSFET. During power up, this is accomplished by holding the BYPASS/MULTI-FUNCTION pin to 4.9 V while the line undervoltage condition exists. The BYPASS/MULTI-FUNCTION pin then rises from 4.9 V to 5.85 V when the line undervoltage condition goesaway. When the switching of the power MOSFET is disabled in auto-restart mode and a line undervoltage condition exists, the auto-restart counter is stopped. This stretches the disable time beyond its normal 2.5 seconds until the line undervoltage condition ends.The line undervoltage circuit also detects when there is no external resistor connected to the EN/UV pin (less than ~2 m A into the pin). In this case the line undervoltage function is disabled.TinySwitch-III OperationTinySwitch-III devices operate in the current limit mode. When enabled, the oscillator turns the power MOSFET on at the beginning of each cycle. The MOSFET is turned off when the current ramps up to the current limit or when the DC MAX limit is reached. Since the highest current limit level and frequency of a TinySwitch-III design are constant, the power delivered to the load is proportional to the primary inductance of the transformer and peak primary current squared. Hence, designing the supply involves calculating the primary inductance of the transformer for the maximum output power required. If the TinySwitch-III is appropriately chosen for the power level, the current in the calculated inductance will ramp up to current limit before the DC MAX limit is reached.Enable FunctionTinySwitch-III senses the EN/UV pin to determine whether or not to proceed with the next switching cycle. The sequence of cycles is used to determine the current limit. Once a cycle is started, it always completes the cycle (even when the EN/UV pin changes state half way through the cycle). This operation results in a power supply in which the output voltage ripple is determined by the output capacitor, amount of energy per switch cycle and the delay of the feedback.The EN/UV pin signal is generated on the secondary bycomparing the power supply output voltage with a reference voltage. The EN/UV pin signal is high when the power supply output voltage is less than the reference voltage.Figure 5. Auto-Restart Operation.P I -4098-08230525005000Time (ms)5010100200300VDRAINVDC-OUTPUTTNY274-280In a typical implementation, the EN/UV pin is driven by an optocoupler. The collector of the optocoupler transistor is connected to the EN/UV pin and the emitter is connected to the SOURCE pin. The optocoupler LED is connected in series with a Zener diode across the DC output voltage to be regulated. When the output voltage exceeds the target regulation voltage level (optocoupler LED voltage drop plus Zener voltage), the optocoupler LED will start to conduct, pulling the EN/UV pin low. The Zener diode can be replaced by a TL431 reference circuit for improved accuracy.ON/OFF Operation with Current Limit State MachineThe internal clock of the TinySwitch-III runs all the time. At the beginning of each clock cycle, it samples the EN/UV pin to decide whether or not to implement a switch cycle, and based on the sequence of samples over multiple cycles, it determines the appropriate current limit. At high loads, the state machine sets the current limit to its highest value. At lighter loads, thestate machine sets the current limit to reduced values.。
西门子 ET279C 120V 7 天数字时钟开关用户手册说明书

before turning power “ON”.
heating, air conditioning systems, pumps, etcetera. Up to 20 (10
Installation
ON/10 OFF or any combination or 20 momentary pulse WARNING: DISCONNECT THE POWER TO THE TIME
General Safety Information
WARNING: Disconnect all power before installing or
servicing this time switch or its connected loads. 1.Follow all local electrical and safety codes, National
Descript ion Electric Code (NEC), as well as Occupational Safety and
Health Act (OSHA).
The Intermatic Electronic 7-Day Time Switch automatically 2. If the power disconnect point is out of sight, lock it in the “OFF”
®
Electronic 7 - Day Time Switches
With 2 Independent Outputs and Battery Powered Clock Operation
ET270 SERIES INCLUDING MODELS:
ET279C (SPST each output) 120V Supply
UC2710J资料

–70 –4.0
µA
Output High Sat., VC – VO Output Low Sat., VO Thermal Shutdown
IO= –100mA IO= –6A IO= 100mA IO= 6A
1.35 2.2
V
3.2 4.5
V
0.25 0.6
V
3.4 4.5
V
165
°C
From Inv., Input to Output (Note 3, 4):
TA = TJ.
PARAMETERS
TEST CONDITIONS
MIN TYP MAX UNITS
VIN Supply Current
VIN =18V, VC =18V, Output Low
26 35 mA
VIN =18V, VC =18V, Output High
21 30 mA
VC Supply Current
VIN =18V, VC =18V, Output Low
1.5 5.0 mA
VIN =18V, VC =18V,Output High
5.0
8
mA
UVLO Threshold
VIN High to Low
3.8 4.1 4.4 V
VIN Low to High
4.1 4.4 4.8 V
2
元器件交易网
Rise Time Delay
CL = 0
35 70 ns
CL = 2.2nF
35 70 ns
CL = 30nF
35 70 ns
10% to 90% Rise
CL = 0
20 40 ns
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NEC's UPC2791TB and UPC2792TB are Silicon MMIC Wideband Amplifiers manufactured using NEC's 10 GHz f T NESAT TM II silicon bipolar process. These devices are de-signed for use as second IF buffer amps in DBS tuners. The UPC2791/92TB are pin compatible and their performance is comparable to the larger UPC1675/76G, so they are suitable for use as a replacement to help reduce system size. These IC's are housed in a 6 pin super minimold or SOT-363 pack-age.NEC's stringent quality assurance and test procedure ensure the highest reliability and performance.DESCRIPTIONFEATURES• HIGH DENSITY SURFACE MOUNTING:6 pin super minimold or SOT- 363 package •SUPPLY VOLTAGE: V CC = 4.5 to 5.5 V •WIDEBAND RESPONSE:UPC2791TB: fu = 1.9 GHz TYP UPC2792TB: fu = 1.2 GHz TYP •POWER GAIN:UPC2791TB: G P = 12 dB TYP UPC2792TB: G P = 20 dB TYPPRELIMINARY DATA SHEETGAIN vs. FREQUENCYFrequency, f (GHz)G a i n , G P (d B )TYPICAL PERFORMANCE CURVES201510500.51.01.52.0PART NUMBER UPC2791TBUPC2792TBPACKAGE OUTLINES06S06SYMBOLSPARAMETERS AND CONDITIONS UNITS MIN TYP MAX MIN TYP MAX I CC Circuit Current (no signal)mA 121722141924G P Power Gain, f = 500 MHzdB 101214172022f U Upper Limit Operating Frequency(The gain at f U is 3 dB down from the gain at 100 MHz)GHz 1.6 1.9 1.0 1.2P O (SAT)Maximum Output Level, f = 500 MHz, P IN = 0 dBm dBm +2+4+3+5NF Noise Figure, f = 500 MHz dB 5.57.03.56RL IN Input Return Loss, f = 500 MHz dB 9121215RL OUT Output Return Loss, f = 500 MHz dB 811912ISOLIsolation, f = 500 MHzdB20242428ELECTRICAL CHARACTERISTICS (T A = +25 °C, V CC = 5.0 V, Z L = Z S = 50 Ω)Date Published: June 28, 2005The information in this document is subject to change without notice. Before using this document, please confirmthat this is the latest version.ABSOLUTE MAXIMUM RATINGS1(T A = 25°C) SYMBOLS PARAMETERS UNITS RATINGS V CC Supply Voltage V6P IN Input Power dBm+10P T Total Power Dissipation2mW200T OP Operating Temperature°C-40 to +85 T STG Storage Temperature°C-55 to +150RECOMMENDEDOPERATING CONDITIONSSYMBOL PARAMETER UNITS MIN TYP MAX V CC Supply Voltage V 4.5 5.0 5.5 T OP Operating Temperature˚C-40+25+85Notes:1.Operation in excess of any one of these parameters may resultin permanent damage.2.Mounted on double sided copper clad 50 x 50 x 1.6 mm epoxyglass PWB (T A = +85°C).PIN DESCRIPTIONOUTLINE DIMENSIONS (Units in mm)PACKAGE OUTLINE S06PIN CONNECTIONSINOUTV CCTEST CIRCUITPART NUMBER MARKING QTY UPC2791TB-E3C2S 3K/reel UPC2792TB-E3C2T3K/reelORDERING INFORMATION (Solder Contains Lead)Note:Embossed tape, 8 mm wide. Pins 1, 2, and 3 face perforatedside of tape.(Top View)(Bottom View)1.GND2.GND3.Output Marking is an example of UPC2791TB4.V CC5.GND6.Input214562145633C 2CPART NUMBER MARKING QTY UPC2791TB-E3-A C2S 3K/reel UPC2792TB-E3-AC2T3K/reelORDERING INFORMATION (Pb-Free)Note:Embossed tape, 8 mm wide. Pins 1, 2, and 3 face perforatedside of tape.Life Support ApplicationsThese NEC products are not intended for use in life support devices, appliances, or systems where the malfunction of these products can reasonably be expected to result in personal injury. The customers of CEL using or selling these products for use in such applications do so at their own risk and agree to fully indemnify CEL for all damages resulting from such improper use or sale.A Business Partner of NEC Compound Semiconductor Devices, Ltd.4590 Patrick Henry DriveSanta Clara, CA95054-1817Telephone: (408)919-2500Facsimile:(408) 988-0279Subject:Compliance with EU DirectivesCEL certifies, to its knowledge, that semiconductor and laser products detailed below are compliant with the requirements of European Union (EU) Directive 2002/95/EC Restriction on Use of Hazardous Substances in electrical and electronic equipment (RoHS) and the requirements of EU Directive 2003/11/EC Restriction on Penta and Octa BDE.CEL Pb-free products have the same base part number with a suffix added. The suffix –A indicates that the device is Pb-free. The –AZ suffix is used to designate devices containing Pb which are exempted from the requirement of RoHS directive (*). In all cases the devices have Pb-free terminals. All devices with these suffixes meet the requirements of the RoHS directive.This status is based on CEL’s understanding of the EU Directives and knowledge of the materials that go into its products as of the date of disclosure of this information.Restricted Substanceper RoHS Concentration Limit per RoHS(values are not yet fixed)Concentration containedin CEL devices-A-AZLead (Pb)< 1000 PPMNot Detected(*) Mercury< 1000 PPM Not DetectedCadmium< 100 PPM Not Detected Hexavalent Chromium< 1000 PPM Not DetectedPBB< 1000 PPM Not DetectedPBDE< 1000 PPM Not DetectedIf you should have any additional questions regarding our devices and compliance to environmental standards, please do not hesitate to contact your local representative.Important Information and Disclaimer: Information provided by CEL on its website or in other communications concerting the substance content of its products represents knowledge and belief as of the date that it is provided. CEL bases its knowledge and belief on information provided by third parties and makes no representation or warranty as to the accuracy of such information. Efforts are underway to better integrate information from third parties. CEL has taken and continues to take reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on incoming materials and chemicals. CEL and CEL suppliers consider certain information to be proprietary,and thus CAS numbers and other limited information may not be available for release.In no event shall CEL’s liability arising out of such information exceed the total purchase price of the CEL part(s) at issue sold by CEL to customer on an annual basis.See CEL Terms and Conditions for additional clarification of warranties and liability.。