6R关节型机器人运动学建模
基于旋量法的6R机械臂运动学建模及分析
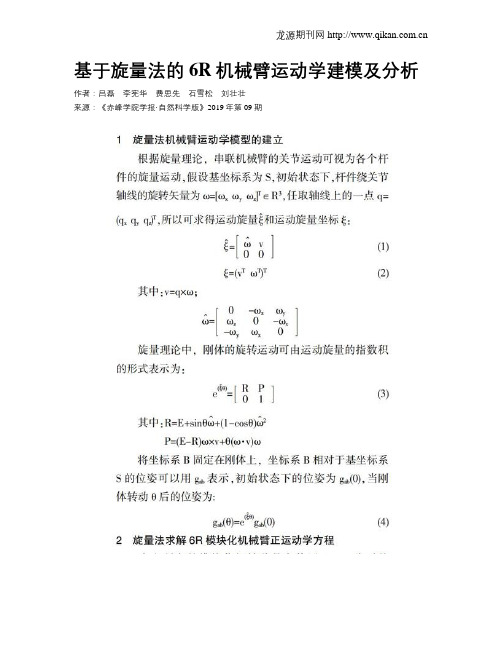
基于旋量法的6R机械臂运动学建模及分析作者:吕磊李宪华费思先石雪松刘壮壮来源:《赤峰学院学报·自然科学版》2019年第09期摘要:针对六自由度模块化机械臂,基于旋量理论建立机械臂运动学模型,并且将机械臂三维模型导入ADAMS软件中进行运动学仿真,验证了运动学方程的正确性.基于该运动学模型,应用蒙特卡洛法对机械臂的工作空间进行了求解,绘制了机械臂工作空间的点云图,为进一步的运动学特性分析和动力学研究奠定了基础.关键词:串联机械臂;旋量理论;运动学;工作空间中图分类号:TP241.2;TP242.2; 文献标识码:A; 文章编号:1673-260X(2019)09-0053-03目前针对串联机器人正向运动学模型的建立主要有D-H参数法和旋量法[1].D-H参数法是19世纪60年代,Denavit和Hartenberg上提出的一种对串联机器人数学建模方法,并且推导出了它的运动方程,由于便于理解,D-H参数法方法应用较为广泛[2-4].但是D-H参数法建模需要在每个关节上建立一个坐标系,每个关节必须绕z轴旋转,同时连杆的移动要沿坐标系x方向,并且当机械臂的构型发生变化时就需要重新对机械臂进行建模,因此采用D-H参数法为机械臂确定D-H参数和连杆坐标系将会十分繁琐[5-7].而旋量法建模不需要对每一个关节都建立坐标系,只需要建立一个基坐标系和一个机械臂末端工具坐标系即可,建模的过程较为简单[8].刘冠隆等[9]基于旋量理论法,应用指数积公式对七自由度和六自由度机械臂建立了正向运动学方程,并且利用ADAMS进行了运动仿真,验证了正向运动学方程的正确性;王国勋等[10]针对六自由度工业机器人,基于旋量理论对机械臂进行运动学建模,并且基于此模型对机械臂的逆运动学进行了求解及验证.钱东海等[11]基于旋量法建立起的机器人运动学模型,并且采用Paden-Kahan子问题方法进行了逆运动学的求解.李文威等[12]基于旋量理论对SRU构型仿人机械臂进行了正运动学与可操作性分析.殷志锋等[13]基于旋量理论对绝对冗余度机器人的运动学正解和逆解问题进行了分析,并且提出了基于指数积公式的绝对冗余度机器人的运动学解.本文基于旋量理论针对六自由度模块化机械臂进行了运动学方程的求解,并将三维模型导入至ADAMS软件进行运动学仿真,通过仿真数据与理论数据对比,验证了运动学方程的正确性.最后基于蒙特卡洛法,应用MATLAB软件该机械臂的工作空间进行了点云图的绘制,求解了机械臂的工作空间范围.1 旋量法机械臂运动学模型的建立根據旋量理论,串联机械臂的关节运动可视为各个杆件的旋量运动,假设基坐标系为S,初始状态下,杆件绕关节轴线的旋转矢量为,任取轴线上的一点q=(qx qy qz)T,所以可求得运动旋量和运动旋量坐标:旋量理论中,刚体的旋转运动可由运动旋量的指数积的形式表示为:将坐标系B固定在刚体上,坐标系B相对于基坐标系S的位姿可以用gab表示,初始状态下的位姿为gab(0),当刚体转动后的位姿为:2 旋量法求解6R模块化机械臂正运动学方程本文研究的模块化机械臂是由德国Amtec公司的Power Cube模块构建而成,机器人手臂为两条六个自由度机械臂,末端为手爪模块.机械臂模型如图1所示,机械臂有六个转动关节,每个关节的关节范围如表1所示.根据该模块化机械臂的构型特点,选取机械臂的某一形位,建立基坐标系o和固定在机械臂末端执行器的坐标系ee,具体表示如图2所示,其中L2=328mm,L4=276mm,L6=336.2mm.建立机械臂运动学方程的步骤如下:(1)根据初始状态下机械臂构型和尺寸可以确定各关节轴线的单位方向向量为:其中:gee()表示给定关节变量时,坐标系ee相对于基坐标系o的位姿;gee(0)表示初始状态下,坐标系ee相对于基坐标系o的位姿.3 机械臂运动学仿真首先根据机械臂实体在SolidWorks中建立机械臂的三维模型,然后将机械臂的三维模型转换parasolid格式文件并导入ADAMS软件中.在ADAMS环境下,根据机械臂的实际运动情况,添加各个部件之间的运动约束.其中基座与大地之间添加固定副,由于该机械臂有6个转动关节,因此在各个转动关节处添加转动副.在设置相应运动约束后,为各个转动副添加相应驱动,如图3所示.其中,各关节的驱动函数如表2所示.当设置好各个参数之后,对机械臂模型进行运动仿真,仿真时长设置为5.0,步长为0.1.通过ADAMS后处理模块,可以得到机械臂的6个关节角和末端执行器位移随时间的变化曲线如图4所示.根据运动学方程,利用MATLAB编制程序,设置各个关节运动函数与表2中相同,在[0,5]s区间每隔0.1s取点,将所取点对应的角度值代入运动学方程中,可以求得机械臂末端位移的理论值.之后将ADAMS仿真中机械臂末端位移数据导入至MATLAB中,绘制ADAMS 仿真曲线和理论值散点如图5所示.图5中,曲线代表ADAMS仿真曲线,*点代表运动学方程计算点理论值,从ADAMS仿真曲线和运动学仿真所计算的理论数据对比可以看出,末端标记点位移仿真曲线和理论值相差较小,验证了运动学方程的正确性.4 工作空间分析机械臂的工作空间指的是在机械臂的操作空间中机械臂的末端执行器所能到达的所有点的集合.在实际工作中,由于需要机械臂回避障碍物以及机械臂的灵活性分析等,所以工作空间被看作是在机械臂结构设计过程中一个重要指标,因此对机械臂的工作空间求解具有很强的现实意义.本文基于蒙特卡洛法并利用机械臂的运动学方程,求得机械臂末端位置坐标,然后利用MATLAB可视化功能将这些点以描点方式显示出来,即获得机械臂的工作空间点云图.根据表1给出的各个关节范围,在该范围内对每个关节变量取N=15000个随机值,组成N个关节向量.将每个关节向量带入运动学方程中,可以得到机械臂末端执行器在操作空间中的N各点的位置坐标,将这些点绘制成点云图如图6所示.由图4可以看出,机械臂工作空间为呈椭球形状,工作空间范围为:x∈[-950,950]mm,y∈[-950,950]mm,z∈[620,620]mm.可以发现,由于受机械臂构型影响,机械臂在z轴方向上末端可达范围相对于y,z范围较小.5 结论本文基于旋量理论对六自由度模块化机械臂进行运动学建模,并且将机械臂的三维模型导入ADAMS中进行运动学仿真,通过计算与仿真的对比分析,验证了运动学模型的正确性.相对于D-H参数法,采用旋量法建模仅需要建立工具坐标系与基坐标系即可,更加简便、直观.最后对机械臂的工作空间进行分析,绘制了机械臂工作空间点云图,求出机械臂工作空间范围,为进一步的机械臂运动学特性分析和动力学研究奠定了基础.——————————参考文献:〔1〕王梦.多自由度串联机器人运动学分析与仿真[D].北京理工大学,2016.〔2〕Denavit J, Hartenberg R S. A kinematic notation forlower pair mechanisms based on matrices[J]. Journalof Applied Mechanics, 1995,2l(5): 215-221.〔3〕Whitney D E. Mechanical Assemblies: Their Design, Manufacture, and Role in Product Development[M]. New York: Oxford University Press, 2004: 35-51.〔4〕Santolaria J, Aguilar J J, Yagüe J A, et al. Kinematic parameter estimation technique for calibration and repeatability improvement of articulated arm coordinate measuring machines[J]. Precision Engineering, 2008, 32(4):251-268.〔5〕馮崇.工业机器人运动分析及控制研究[D].河南科技大学,2015.〔6〕敖天翔,刘满禄,张华,等.结合旋量和代数方法的工业机械臂逆运动学解法[J].机械科学与技术,2017,36(8):1224-1229.〔7〕李君.基于旋量理论的Stanford臂的运动学分析[J].天津科技大学学报,2010,25(4):72-75.〔8〕Anish K Mampetta,A Lie group formulation of Kinematics and Dynamics of serial Manipulations[J]. Course Project Report,2006:1-5.〔9〕刘冠隆,贺晓莹,高兴宇,李明枫,Alaa Aldeen Housein.七自由度双臂机器人旋量理论正向运动学与工作空间分析[J/OL].机械科学与技术:1-8[2019-03-10].https:///10.13433/ki.1003-8728.20180240.〔10〕王国勋,舒启林,王军.基于旋量理论的6R工业机器人运动学建模与分析[J].机床与液压,2018,46(23):35-42.〔11〕钱东海,王新峰,赵伟,崔泽.基于旋量理论和Paden-Kahan子问题的6自由度机器人逆解算法[J].机械工程学报,2009,45(09):72-76+81.〔12〕李文威,周广兵,陈再励,吴亮生,黄炜聪,陈惠纲.基于旋量理论的仿人机械臂正运动学与可操作性分析[J].自动化与信息工程,2018,39(05):1-4+9.〔13〕殷志锋,葛新锋.基于指数积的冗余度机器人运动学求解算法[J].制造业自化,2013,35(01):4-8.。
一般6R关节式机器人运动仿真分析及系统开发
此外,研究了运动学逆解的存在性、多解性和最优解等问题,进行了奇异位姿状态的分析过程,并且通过权重法和逆解求取流程解决了逆解ቤተ መጻሕፍቲ ባይዱ优解选取的问题。然后对运动学,工作空间和轨迹规划等内容进行了仿真分析。
在Robotics Toolbox模块中完成了PR05型号数学模型的建立,实现了其运动学正逆解的仿真过程,检验了正逆解算法和方程的有效性。此外,使用了蒙特卡洛方法绘制了目标的理论和实际的工作空间,并进行了相关轨迹规划的模拟仿真,得到了各运动关节的仿真曲线以及末端的运动轨迹。
最后设计开发了运动仿真系统软件。对运动仿真系统进行了需求分析,并确定了系统实现途径。
一般6R关节式机器人运动仿真分析及系统开发
随着机器人技术的不断成熟发展,越来越多的机器人在生产制造等行业中大显身手,而机器人系统仿真技术的重要性也随之日益凸显。机器人仿真技术便是在不涉及实体硬件和具体作业场景的状况下,使用计算机相关图像技术,建立一个可进行人机交互的虚拟三维环境,并据此对其作业运动实行仿真。
通过Visual C++和OpenGL建立了三维绘图环境,构建了仿真系统程序的开发框架。详细阐述了运动仿真系统软件的的总体设计及功能框架,着重介绍了用户界面、模型建立、运动控制、逆解计算、轨迹规划和仿真再现等模块的设计界面和程序编写思路。
基于Robotics Toolbox的6R型机械臂运动学仿真及分析
Journal of Anhui Science and Technology University
z z z PsgiolePfrp
基 于 Robotics Toolbox的 6R型 机械 臂 运动 学仿 真 及 分析
史召峰 ,陈周五
(安徽工业经济职业技术学院 机械与汽车工程学院,安徽 合肥 230051)
了机械臂 运动 学仿 真的 一般 规律 ,由仿 真得 出的结 果 可知 ,本 文的研 究对 于关 节型机 械臂 的运动 学仿 真具
有 重 要 意 义 。
关 键词 :Robotics Toolbox;轨 迹规 划 ;运 动 学仿真 ;灵 活性
中图分 类号 :TP241
文献 标识码 :A
文 章编号 :1673—8772(2016)02—0060—07
Kinem atic Sim ulation and Analysis of 6 R M anipulator
Based on Robotics Toolbox
SHI Zhao — feng,CHEN Zhou — WU
(School of Mechanical&Automotive Engineering,Anhui Technical College of IndustU and Economy,Hefei 23005 1,China) Abstract:The kinematics of manipulator was studied aimed at 6R manipulator.Firstly,the joint coordinate sys—
上述研 究 中多 以 PUMA和 Stanford机 器人 为例 ,本 文则 以一 种 6R 型川 崎机 械臂 为研 究 对 象 ,首先 采
6R机器人正运动学分析方法研究
g i v e n j o i n t s p a c e v ri a a b l e s . B a s e d o n t h e m e c h ni a c a l s t r u c t u r e f6 o R a r c w e l d i n g r o b o t , t h e k i n e m a t i c s e q u t a i o n s o ft h e r o b o t
u s i n g MA T L AB .T h e k i n e ma t i c s s i mu l t a i o n mo d e l o f t h e r o b o t i s e s t a b l i s h e d i n t h e v i r t u a l p r o t o t y p e s o f t w r a e ,a n d d i s p l ce a m e n t c u r v e s ft o h e r o b o t e n d — — ma ni p u l to a r u n d e r d f i f e r e n t c o n d i t i o s n re a o b t a i n e d b y s i mu l ti a o n . he T e n d — - ma ni p u l a t o r p o s e m tr a i x e s ft o h e t h r e e m e t h o d s re a c o m p re a d nd a t h e c o r r e c t n e s s ft o h e t h r e e m e t h o d s s i v e r f i  ̄ d he T r e s e a r c h r e s u l t s
SC-8A型6R垂直关节机器人运动学分析与建模

j o i n t a n g l e s w e r e p i c k e d o u t a mo n g t h e m u l t i p l e s o l u t i o n s o f t h e i n v e r s e — k i n e ma t i c s .T h e r e s u l t w a s s i mu l a t e d u s i n g MA T L A B a n d t h e
LI U P e n g f e i , YANG Me n g x i ng, S ONG Ke, L I ANG Ch e n y a n
( T h e 1 6 t h I n s t i t u t e ,C h i n a A e r o s p a c e S c i e n c e a n d T e c h n o l o g y C o r p o r a t i o n ,X i ’ a n S h a a n x i 7 1 0 1 0 0,C h i n a )
坐标 系,由此获得连杆 的 D — H参数并建立机器人运动学模型。着重推 导该 型机器人 的正解和逆解的解析表达式 ,并 针对逆 解 的多解问题提出筛选方法。用 MA T L A B对正解和逆解算法进行数值 验证 ,结果表 明算法正确。
关 键 词 :S C 一 8 A机 器 人 ;D — H方 法 ;正 解 ;逆解
2 0 1 3年 5月
机床与液压
M ACHI NE TO0L & HYDRAULI CS
Ma v 2 01 3
第4 1 卷 第 9期
Vo 1 . 41 No . 9
DO I :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 0 9 . 0 3 4
6R 机器人三维图形运动仿真与奇异形位分析
6R机器人三维图形运动仿真与奇异形位分析刘全浩,胡旭东,江贵龙,李鹏刚(浙江理工大学机械与自动控制学院,浙江省纺织装备技术重点实验室,浙江杭州 310018)email: hsddzlqh@摘要:本文以staubli 机器人为研究对象,设计开发了6R(六自由度旋转关节)机器人基于三维图形的运动学仿真系统。
该系统用三维形体表示机械手复杂的位置、姿态信息,可对机器人运动学进行求解和实施三维图形仿真,达到了对机器人的末端执行器的准确控制。
利用实时绘出的关节波形图,本文提出了一种新的对机器人运动过程中的奇异形位进行分析的方法。
关键词:机器人;运动学;仿真;图形仿真;奇异中图分类号:TP242.2 文献标识码:AThe Study of Kinematics Simulation of 6R Robot based on 3D GraphicsLIU Quan-hao,HU Xu-dong , JIANG Gui-long ,LI Peng-gang(School of Mechanical & Automatic Control, Zhejiang Province Key Lab of Modern Textile Machinery & Technology, Zhejiang University of Sciences, Hangzhou, 310018)Abstract: This paper took staubli robot for an example and introduced a systemof kinematics simulation of 6R robot. Using three dimension entities to show the complex information for position and pose of actuator, this system presents an accurate solution of staubli manipulator kinematics and can complete three-dimensional dynamic graph simulation. Drawing the values of the 6R joint with time, it provides a useful method to analyze the singular configuration of 6R robot work process.Key words:robot; kinematics; simulation; graphics simulation; singular configuration1引言随着机器人应用领域的不断拓展和对机器人研究的不断深入,机器人仿真系统作为机器人设计和研究的安全可靠,灵活方便的工具,越来越受到重视。
6R关节型机器人运动学建模
第5卷第2期智 能 系 统 学 报 V o.l 5 .22010年4月 CAA I T ransactions on Inte lligent Syste m s Apr .2010do:i 10.3969/.j issn .1673 4785.2010.02.0106R 关节型机器人运动学建模王立权1,刘秉昊2,吴健荣1,韩金华1,卢正宇1(1.哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001;2.哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)摘 要:为满足新开发的多机器人实验系统编程需要,研究了6R 机器人运动学逆解问题.推导了代数逆解结果,并研究了将其用于实际控制系统时,逆解的漏解、增根和多解问题.与传统方法比较,采用了便于程序模块化的坐标系设置方式,在需要经常更换作业工具的多机器人系统中更为适用.推导过程只需2次矩阵逆乘,步骤简单.基于VC++和Open GL 技术编制了系统程序,检验了方法的有效性.以其中一个位姿为例,对比几何方法得出的结果,验证了算法的正确性.研究的结果适用于M OTOM AN U P6和PUM A560等相似构型的所有机器人.关键词:逆运动学;机器人;代数解法中图分类号:TP241 文献标识码:A 文章编号:1673 4785(2010)02 0156 05M odeli ng and imple m enti ng t he i nverse ki ne m atics ofa six revolute joi nt robotWANG L i quan 1,LIU B i n g hao 2,WU Jian rong 1,H an ji n hua 1,L U Zheng yu1(1.Co llege o fM echan ical and E lectr i ca l Eng i neering ,H arbi n Eng i neeri ng U niversity ,H arb i n 150001,Chi na)Abst ract :To prog ra m a ne w m ulti r obo t syste m,i n verse k i n e m a tic equati o ns for a si x revo l u te j o i n t (6R )robot w ere developed .The ir a l g ebra ic so l u ti o ns w ere then derived .Conditi o ns causing there to be no so l u tion,ex traneous roots ,orm ultiple so l u ti o ns for inverse k i n e m atic equati o ns w ere studied for equations used i n t h e practical contr o l of a syste m.Co m pared w it h traditionalm ethods ,th ism et h od is m ore su itable for a m ulti robo t syste m in w hich w or ki n g too ls are frequently replaced.A s on l y t w o i n verse m atricesw ere involved ,the m ethod w as si m ple and easy .I n order to ver ify the effecti v eness of the m ethod ,itw as co m piled using VC++and OpenGL soft w are .A fter selecti n g a spec ific positi o n as an exa m ple ,w e pr oved t h e co rrectness of t h e a l g orithm by co m pari n g its resu lts to those fr o m geo m etric analysis .The research is app licable to other robot syste m s w ith si m ilar m echan ica l con fi g urations ,such asMOTOMAN UP6or PUMA 560.K eywords :inverse ki n e m atics ;robo;t a l g ebra ic solution 收稿日期:2008 12 20.基金项目:黑龙江省自然科学基金重点资助项目(Z D200911).通信作者:王立权.E m ai:l w angli quan@h .运动学逆解是机器人控制的基础,已有大量文献研究.机器人运动学逆解方法有很多,包括代数法、几何法、数值法,以及神经网络、遗传算法等智能方法.其中,代数法结果精确、实时性好,在MOTO MAN 、PUMA 型机器人控制中最为实用.为建立开放的多机器人协调作业实验平台,编制适用于多机器人、多工具系统的机器人逆解程序,笔者查阅了大量文献.发现绝大部分文献都是单个机器人逆解方法的理论研究,既不考虑实际控制中非常重要的漏解、增根、多解问题,也不考虑编程应用的方便性,个别文献的理论推导还存在瑕疵.文献[1]理论推导了PUMA 560的运动学逆解方程,文献[2 3]给出了一种求解MOTOMAN UPJ 型机器人的逆解方法.文献[4]在文献[2]的基础上讨论MOTOMAN SV3X 型机器人逆解问题,注意到了机器人安装位置和所配工具的变化.由于使用反正弦、反余弦、反正切表示角度,文献[2]和文献[4]都存在个别漏解问题,国内一些介绍机器人技术的专著中也有类似现象.此外,以上文献对推导的多组解没有作进一步处理,其结果尚不能直接用于机器人控制编程.本文结合课题需要,在文献[3 4]的基础上对逆解方法进行改进,寻求一种准确可靠、实时性好、可移植、方便多机器人系统配置和工具换接的逆解方法.基于VC ++和OpenGL 成功地开发了软件系统,将运动学算法融入到带实时三维仿真的控制系统,在实验系统上验证了解算结果.1 D H 坐标系与运动学正解本文研究的6R 机器人结构如图1所示,按D H 法建立机器人坐标系,相应D H 参数如表1,连杆变换矩阵如式(1).不同于其他文献,这里坐标系{6}原点在机器人手腕点,用6t T 表示工具坐标系{t}相对于坐标系{6}的位姿,增加or 0T 表示机器人基座坐标系{0}相对于世界坐标系{or }的位姿.在多机器人相对位置和联接工具经常变化的情况下,可根据安装位置和工具形状修改每个机器人的or0T 和6t T 矩阵,而无需修改核心的运动学算法,有利于软件系图1 连杆坐标系设置F i g .1 L i nk fra m e assi gn m en ts统的模块化.i-1iT =c i -s i 0a i-1s i c i-1c i c i-1-s i-1-d i s i-1s i s i-1c i s i-1c i-1d i c i-11.(1)式中:c i =cos i ,s i =sin i ,c i =cos i ,s i =si n i ,以下类似.表1 连杆参数表Tab l e 1 L ink para m eter si i -1/( )a i -1/mm d i /mm /( )变量范围/( )10a 0=0d 1=0 1-180~1802-90a 1=120d 2=0 2-170~9030a 2=220d 3=03-225~704-90a 3=80d 4=200 4-180~180590a 4=0d 5=0 5-150~1506-90a 5=0d 6=06-180~180运动学正解是已知各关节角度求解机器人末端工具点位姿,即解方程组or tT =ort T ( 1, 2,!, 6).先以06T =01T 12T 23T 34T 45T 56T 得到正解算法的核心部分06T =06T ( 1, 2,!, 6),再由ort T =or0T 06T 6t T 得到最终结果.2 运动学逆解方程推导运动学逆解是已知末端位姿求解各关节角度,即由ort T ( 1, 2,!, 6)=ort T 确定的12个非线性方程(其中仅有6个独立方程)来求解 1, 2,!, 6.由ortT =or 0T 06T ( 1, 2,!, 6)6t T 作变换可得6T ( 1, 2,!, 6)=(or0T )-1ortT (6t T )-1,(2)当给定or0T 和6t T ,右边为常矩阵.于是,求逆解的核心问题是:已知06T ,求 1, 2,!, 6.由06T =01T 12T 23T 34T 45T 56T 作变换,得:23T 34T 45T =(12T )-1(01T )-106T (56T )-1.(3)左边:23T 34T 45T =25R [25p x25p y25p z]T1.式中:25p x =a 3c 3-d 4s 3+a 2,25p y=a 3s 3+d 4c 3,25p z =0.右边:(12T )-1(01T )-106T (56T )-1=R ∀[p ∀x p ∀y p ∀z ]T1式中:p ∀x =c 1c 2p x +s 1c 2p y -s 2p z -a 1c 2,p ∀y =-c 1s 2p x -s 1s 2p y -c 2p z +a 1s 2,p ∀z =-s 1p x +c 1p y .1)求解 1、 2、 3.考虑式(3)左、右对应元素(3,4)相等,得 1=atan2(p y ,p x )或 1=atan2(-p y ,-p x ).考虑式(3)左、右对应元素(1,4)和(2,4)相等,得:a 3c 3-d 4s 3=c 2u -s 2v -a 2,(4)a 3s 3+d 4c 3=-s 2u -c 2v .(5)式中:u =c 1p x +s 1p y -a 1,v =p z .将(4)和(5)两端平方后相加消去s 3、c 3,得: 2=atan2(-v,u )#a tan2(v 2+u 2-m 2,m ).式中:m =a 23+d 24-u 2-v 2-a 22-2a 2.∃157∃第2期 王立权,等:6R 关节型机器人运动学建模若出现v2+u2-m2<0,则表明目标位姿点不在机器人可达工作空间内.由式(4)和(5)得∀3=atan2(a3h2-d4h1,a3h1+d4h2).式中:h1=c2u-s2v-a2,h2=-s2u-c2v.考虑第3关节的转动范围是-225< 3<70,因此3= ∀3,∀3-2,∀3%(70/180),∀3>(70/180).2)求解 4、 5、 6.由06T=03T36T得:36T=(03T)-106T.(6)左边:36T=c4c5c6-c4c5s6-s4c6-c4s5a3 s5c6-s5s6c5d4 -s4c5c6-c4s6s4c5s6-c4c6s4s500001.右边:(03T)-106T=r11r12r13r14 r21r22r23r24 r31r32r33r34 0001,式中:r11=(c1c2c3-c1s2s3)n x+(s1c2c3-s1s2s3)n y-(s2c3+c2s3)n z,r12=(c1c2c3-c1s2s3)o x+(s1c2c3-s1s2s3)o y-(s2c3+c2s3)o z,r13=(c1c2c3-c1s2s3)a x+(s1c2c3-s1s2s3)a y-(s2c3+c2s3)a z,r21=(-c1c2s3-c1s2c3)n x-(s1c2s3+s1s2c3)n y+ (s2s3-c2c3)n z,r22=(-c1c2s3-c1s2c3)o x-(s1c2s3+s1s2c3)o y+ (s2s3-c2c3)o z,r23=(-c1c2s3-c1s2c3)a x-(s1c2s3+s1s2c3)a y+ (s2s3-c2c3)a z,r33=-s1a x+c1a y.考虑式(6)左、右对应元素(2,3)相等,得:5=atan2(#1-r223,r23).若s5&0,用si g n(s5)表示s5的符号,考虑式(6)两边对应元素(1,3)和(3,3)相等,得4=a tan2(r33∋sign(s5),-r13∋si g n(s5)).考虑式(6)两边对应元素(2,1)和(2,2)相等,得6=atan2(-r22∋sign(s5),r21∋sign(s5)).若s5=0,代入式(6)右边,再考虑对应元素(1, 1)和(1,2)相等,得 4+ 6=atan2(-r12,r11).此时,机器人处于奇异位置,可先确定 4,再求 6.这里: 4(k+1)= 4(k)+![ 4+6(k+1)- 4+6 (k)],!由第4关节和第6关节许用的最大速度确定. 4(k+1)表示 4目标角度 4(k)表示 4的当前角度,其余类似.至此,求出了全部的 1、 2、 3、 4、 5、 6.上述求解过程用双变量反正切函数atan2(y, x)表示角度,求解过程使用了以下结论[6]:若cos =b,则 =atan2(#1-b2,b)(原文献中为 =atan2(b,#1-b2),疑为疏误);若a cos +b si n =0,则 =atan2(a,-b)或 =atan2(-a,b);若a cos +b si n =c,则 =atan2(b,a)#atan2 (a2+b2+c2,c);若a c os -b si n =ca si n +b cos =d,则 =ata n2(ad-bc,ac+bd).3 推导结果的讨论3.1 角度的表示问题在数学中,y=arcsin(x)的值域是[-/2, /2],y=arccos(x)的值域是[0,],y=arctan(x)的值域是(-/2,/2),z=atan2(y,x)的值域是[-,].大多数机器人关节角度是在-180~ 180之间.因此,用双变量反正切函数表示关节角度更为合适.文献[3,5]直接用反正弦、反余弦、反正切函数表示关节角,而没有考虑实际的机器人关节转动范围,可能造成漏解.对于角度范围超出-180~180的关节要分区间讨论.3.2 增根问题通常产生增根的原因有2个:一是解得的目标角度超出机器人关节允许的转动范围;二是代数法中运用三角函数公式造成.对于前者,必须通过角度范围的校验来剔除增根.对于后者,由于不可避免要使用三角代换,因此需要借助几何方法来分析可能的最大逆解组数,以检查推导过程是否引入了增根.若分析得出的最大逆解组数与推导的逆解组数不∃158∃智 能 系 统 学 报 第5卷符,则应继续寻找约束条件,剔除增根.本文机器人构型最多有8组逆解,得到8组逆解,说明代数求解方法没有引入增根.3.3 多解问题由第2节推导的结果可知,可能的逆解有8组,如图2所示.实际控制系统只能按其中一组解来执行,这里采用结构体变量T ree ,并引入最佳柔顺准则式(7)选取惟一解.ex =m in ((6i=1k i[ i(k +1)- i (k)]2).(7)式中: i (k +1)为目标角度, i (k )为当前角度,k i 为权值.图2 逆解树F ig .2 T ree o f i nverse so l utionsS tructT ree //保存逆解的结构体{i n t P;//结束标识,初始值为0//1,2!表示结束计算的原因double theta1; !double theta6;//角度值 ouble ex ; //柔顺值};具体计算步骤是:计算 1)计算 2(若v 2+u 2-m 2<0,则P =1,ex=107,结束该组解计算;否则执行下一步))判断 2是否为增根(若为增根,则P =2,ex=107,结束该组解计算;否则执行下一步))计算 3)判断 3是否为增根)计算 5)判断 5是否为增根)计算 4)计算 6)调用子程序,检验障碍等约束条件,若不满足则置P 值和ex 值,否则继续下一步)计算ex=(6i =1k i [ i (k +1)- i (k )]2.最后,从中选出ex 值最小的一组解,并判断ex .若ex<107,则将该结构体中的角度值作为最终逆解结果,这样就得到了惟一逆解.若不满足ex<107,则表明没有可行解,检查P值,可以知道原因.4 实验系统及算法检验4.1 实验系统根据课题需要,开发了控制系统的软、硬件,图3是机器人实验系统照片.硬件系统以PC 机作为上位机,通过C AN9820总线控制多个下位单片机,每个单片机控制一个关节.基于VC ++和OpenGL 技术实现机器人的虚拟主从控制,详情见文献[6].图3 机器人系统照片F i g.3 Photo o f the robot system本文所讨论的逆解算法作为算法模块的一个子程序.由于D H 坐标系设置时将基座、工具形状等因素从核心运动学算法中分离,算法模块可供系统中多个机器人共用,并且能够方便地修改其基座位置和工具形状.4.2 逆解结果检验利用实验系统可直观地验证逆解结果.为精确地分析逆解过程,从软件系统中获取运行数据,举例分析其中一个位姿06T =[1000;010120;001220;0001],取权值k 1=k 2=k 3=1,k 4=k 5=k 6=0.2.得到的结果如表2所示,与几何方法分析的结果一致.图4中给出了4组解,肘关节翻转后可再生成4组解.表2中加∗*+的角度值是参考值(实际程序中是随机数),最终程序选择了第4组解.将角度值代入正解表达式,正解结果与给定值一致.图4 机器人的4组解F ig .4 Four so l utions of t he robo t∃159∃第2期 王立权,等:6R 关节型机器人运动学建模表2 运动学逆解结果T ab le2 Sol u tions of i nverse kine m atic组1/()2/()3/()4/()5/()6/()ex(∋10-4)备注190.00-31.38-187.510.0038.8990.004.62290.00-31.38-187.51-180.00-38.89-90.005.26390.00-148.6251.11180.0082.49-90.004.22490.00-148.6251.110.00-82.4990.003.57,5-90.00-96.42-151.410.0067.83-90.004.286-90.00-96.42-151.41-180.00-67.8390.004.937-90.00-178.56*15.01*180.00*16.46*90.00103P=2 8-90.00-178.56*15.01*0.00*-16.46*-90.00103P=25 结束语本文给出了一种求MOTOMAN UP6构型6R机器人运动学逆解的代数方法,它同时适用于PU MA560型机器人.文中采用了更利于程序模块化的D H坐标设置方法,推导过程比文献[1,7 9]更为简捷.用双变量反正切函数表示角度,避免文献[2,4, 7]中可能存在的漏解问题.使用柔顺性准则从最多8组可行解中确定惟一解.基于VC++和OpenGL 技术实际编制了软件系统,检验了算法的有效性,并以其中一个位姿点为例,对比几何分析方法验证了逆解结果的正确性.参考文献:[1]王奇志,徐心和,尹朝万.P UMA机械手逆运动方程新的推导方法及求解[J].机器人,1998,20(2):81 87.W ANG Q i zh,i XU X i nhe,Y I N Chao w an.A new i n ferenti a l m ethod and effic i ent so l utions for i nv erse k i ne m atics equa ti ons o f PUM A robot m an i pu lator[J].Robot,1998,20(2):81 87.[2]王雪松,许世范,郝继飞.M OTOM AN机械手逆运动学方程新的推导方法与求解[J].中国矿业大学学报,2001, 30(1):73 75.W ANG X uesong,XU Sh ifan,HAO J ife.i N e w i n ferenti a l m ethod and effic i ent so l utions for i nv erse k i ne m atics equa ti ons of robo t MOTOM AN[J].Journal of Ch i na U niversity o fM i n i ng&T echno logy,2001,30(1):73 75.[3]陈 平,刘国海.MOTOM AN U P J型机械手运动学改进算法研究[J].机械传动,2006,30(4),23 27.C HEN P i ng,L I U G uoha.i S t udy on an i m proved m ethod i nK i ne m a tics for M OTO M ANUP J man i pu l ato r[J].Journa l o f M echan i ca lT rans m ission,2006,30(4),23 27.[4]崔建伟,宋爱国,黄惟一.遥操作系统中MOTOM ANSV3X机器人的运动建模研究[J].东南大学学报:自然科学版,2003,33(4):424 429.CU I Ji an w e,i SONG A i guo,HUANG W eiy.i R esearch on ki nema ti cs m ode li ng ofM OTOM AN S V3X robo t i n teleoper ate system[J].Journa l o f Southeast U n i versity:N a t ura l Sc ience Edition,2003,33(4):424 429.[5]CRA I G J J.Introducti on t o robotics:m echan i cs and contro l[M].3th ed.Be iji ng:Ch i naM achi ne P ress,2005:1 100.[6]王立权,吴健荣,刘于珑.机器人虚拟主手参考结构及关键技术研究[J].制造业自动化,2008,30(8):54 57.WANG L i quan,W U Jianrong,L I U Y ulong.R e ference ar ch itecture and key techno log ies for v irt ua lm aste r robo t[J].M anufacturi ng A uto m ation,2008,30(8):54 57.[7]孙迪生,王 炎.机器人控制技术[M].北京:机械工业出版社,1997:1 100.[8]熊有伦.机器人技术基础[M].武汉:华中科技大学出版社,2002:73 75.作者简介:王立权,男,1957年生,教授,主要研究方向为机器人技术,在机器人领域发表学术论文26篇。
基于matlab的6r工业机器人运动学仿真与研究

基于matlab的6r工业机器人运动学仿真与研究
一、背景
当今的社会,自动化技术和机器人技术正在快速发展,是当今社会推动经济发展的重要技术之一。
机器人既可以替代人类从事繁琐乏味、危险的繁重体力劳动,也可以替代人类从事精密的精确加工任务,是工业自动化的重要组成部分。
6R机器人是一种6轴机器人,可以实现6自由度及以上的空间运动,与普通机器人相比,它具有更高的运动精度和空间范围等优势,所以在工业机器人中有着重要的地位。
二、目的
本文旨在通过MATLAB仿真,研究6R机器人的运动学特性,从而更好地为6R机器人在工业领域的应用提供实验辅助。
三、研究内容
(1)建立6R机器人运动学模型。
(2)使用MATLAB编写6R机器人的运动学求解算法,实现机器人从一个空间位置到另一个空间位置的运动。
(3)使用MATLAB技术分析6R机器人的工作效率,运动精度,以及运动安全性等性能指标。
(4)对6R机器人在工业环境中的运动学实验进行分析与研究,以便更好地掌握6R机器人的应用技术。
四、总结
6R机器人具有更高的运动精度和空间范围,是工业自动化的重要组成部分。
本文通过MATLAB进行6R机器人的运动学模型建立,求
解算法实现,以及性能指标分析等,为6R机器人的应用提供了实验和理论支持,也为大众更好地理解和更加深入地研究6R机器人的运动学特性提供了便利。
6R机器人工具端的运动学建模及仿真
108机械设计与制造Machinery Design&Manufacture9 ]2018 9 6R机器人工具端的运动学建模及仿真廖伟东,李锻能,王强,廖姣(广东工业大学机电工程学院,广东广州510006)摘要:工业机器人实现加工作业时,工具端沿加工轨迹运动,且要满足加工的位姿要求。
为了控制机器人末端工具工作点相对于工件的轨迹和位姿,建立面向工具坐标系的机器人运动学模型对机器人离线编程有重要意义。
通过将工具坐标系与机器人连杆坐标系分离,研究针对工具坐标系的机器人运动学正、逆解。
提出一种余弦定理结合圆心角定律的机器人空间三点圆?瓜轨迹规划方法,通过调用OpenGL图形库,进行机器人空间圆?瓜轨迹运动仿真,验证了算法的正确性,为本研究条件下机器人离线编程打下理论基础。
关键词%工具坐标系;六关节机器人;轨迹规划;运动学中图分类号:TH16 文献标识码:A文章编号:1001-3997(2018)09-0108-04The Kinematics Modeling and Simulation of 6R Robot with Tool FrameLIAO Wei-dong, LI Duan-neng, WANG Qiang, LIAO Jiao(Guangdong University of Technology Mechanical and Electrical Engineering College,Guangdong Guangzhou510006, China)Abstract:$hile industrial robots achieve machining j obs,it must mee t s the processing requiremen t s of the position andorien t a t ion .In order to seek solutions to the tool coordina t e system for controlling the position and posture of tool frame towards work steady in the robot off—line programming:Separating the tool coordinate system from the robot connecting rod coordinate system,so that obtained the robot forward kinematics and inverse kinematics solution.Explored a method ofthree-point circular arc interpolation of robot space base on law of cosines .Taking advantage of OpenGL graphics library to achieverobot space circular arc interpolation motion simulation,which verify the accuracy of the a l gori t hm and lay the foundation forrobot off-line programming under the involved conditions.Key Words:Tool Coordinate System;6R Robots;Trajectory Planning;Kinematics Modelingl引言打磨、焊接机器人需要在末端装夹磨具、焊枪等工具,而且 工具工作点通常与机器人前一连杆坐标系存在沿!、"、#轴方向 的偏置。
6R型工业机器人装配操作轨迹与运动规划

正向运动学是研究工业机器人的运动学模型,通过给定关节角度,计算出机 器人末端的位置和姿态。
逆向运动学
逆向运动学是研究如何通过给定机器人末端的位置和姿态,反推出关节角度 ,以实现精确控制。
6R型工业机器人控制系统
控制系统硬件
控制系统硬件是实现工业机器人运动的关键部分,包括控制器、伺服电机、编码 器等。
6R型工业机器人装配操作 轨迹与运动规划
2023-11-07
目录
• 引言 • 6R型工业机器人概述 • 装配操作轨迹规划 • 运动规划算法设计 • 实验与分析 • 结论与展望 • 参考文献
01
引言
研究目的与意义
目的
针对6R型工业机器人,研究其装配操作轨迹与运动规划方法,以提高装配操作的精度和效率。
方面要求。
运动性能
在设定的轨迹下,机器人实现了 高精度、高稳定性的运动,满足 装配操作的需求。
传感器数据
通过传感器获取了机器人运动过程 中的多种参数,如速度、加速度、 位置等,为后续分析提供了数据支 持。
结果分析与讨论
数据分析
通过对传感器数据的分析,得出机 器人在运动过程中的性能表现,如 轨迹跟踪误差、运动平稳性等。
通过建立6R型工业机器人的运动学模型,实现了对其装配操作轨 迹的精确规划。
高效的路径搜索算法
为了优化机器人的运动路径,我们设计了一种基于启发式搜索的 路径规划算法,能够快速找到满足任务要求的最佳路径。
可视化与实时监控
通过开发一个可视化界面,实现对机器人运动轨迹的实时监控,确 保了操作的准确性和安全性。
控制系统软件
控制系统软件是实现工业机器人控制的核心,包括运动规划、轨迹生成、实时控 制等。
03
6R工业机器人结构设计及运动轨迹规划仿真研究

实验结果及数据分析
通过实验,我们成功地规划出了一条从起始点到目标点的最优轨迹,并通过 仿真验证了其可行性。与传统的路径规划方法相比,使用MATLAB Robotics工具 箱进行轨迹规划具有更高的精确性和稳定性。此外,该工具箱的使用也大大减少 了计算量和编程难度,提高了工作效率。
结论与展望
本次演示基于MATLAB Robotics工具箱,对工业机器人的轨迹规划及仿真进 行了研究。通过精确的建模、有效的路径规划和仿真验证,成功地得到了最优的 运动轨迹。与传统的路径规划方法相比,使用MATLAB Robotics工具箱进行轨迹 规划具有更高的精确性和稳定性,且降低了计算量和编程难度。
引言
随着制造业的快速发展,工业机器人已成为自动化生产过程中不可或缺的一 部分。工业机器人的应用范围已从传统的机械制造扩展到医疗、农业、服务业等 多个领域。在这个过程中,如何精确地规划机器人的运动轨迹,提高机器人的作 业效率和安全性,成为了一个关键问题。本次演示基于MATLAB Robotics工具箱, 对工业机器人的轨迹规划及仿真进行研究,旨在找到更优的运动轨迹,提高机器 人的性能。
然而,本研究仍存在一些不足之处。首先,实验中只考虑了机器人从起始点 到目标点的单一路径,未考虑环境干扰和动态特性。未来研究可以进一步完善机 器人轨迹规划的动态性和实时性,以适应更多复杂多变的应用场景。其次,实验 中使用的优化算法可能不是最优解,未来可以尝试多种优化算法,以提高轨迹规 划的效率和质量。
在进行机器人运动仿真时,需要注意以下几点: 1、精确建立机器人模型,包括各关节的连接方式和几何参数;
2、考虑重力、摩擦力等外部力的影响,模拟真实的运动环境; 3、选择合适的仿真算法和求解器,保证仿真的实时性和精确性。
基于matlab的6r工业机器人运动学仿真与研究

基于matlab的6r工业机器人运动学仿真与研究
x
本文主要介绍基于Matlab的6R工业机器人运动学仿真与研究,旨在利用Matlab实现工业机器人运动学仿真,以及进行机器人运动学的研究。
研究以6R型工业机器人为例,计算机使用Matlab实现了工业机器人的正逆解和角度转换,利用Matlab对机器人的运动模型进行了仿真,以及利用Matlab进行机器人的末端点运动建模和控制,以及机器人的轨迹规划。
研究工作可以为后续研究者提供参考,为工业机器人的控制技术的更新提供帮助。
一、基于Matlab对6R工业机器人的正逆解及角度转换
首先,需要实现6R工业机器人的正逆解,即从末端位置确定机器人的关节角度,也就是将末端位置转换为机器人的关节角度。
本文使用Matlab对6R工业机器人的正逆解过程进行了模拟,首先,定义6R机器人的参数,如机器人由六个关节构成,每关节的旋转范围,空间位置等。
然后,根据正逆解的数学表达,编写正逆解函数,实现机器人的正逆解过程;此外,编写程序,实现机器人正弦角变换,即将机器人的位置(X,Y)坐标转换为正弦角坐标,以便对机器人的运动进行分析。
二、基于Matlab的6R工业机器人运动仿真
利用Matlab,对6R型机器人的运动模型进行了仿真。
首先,根据机器人的运动模型,编写用于模拟机器人运动的程序,然后,利用Matlab的绘图功能,绘制机器人在XOY平面的变化曲线,实现6R机
器人运动模型的仿真操作。
关节机器人的动力学建模与控制

关节机器人的动力学建模与控制随着科技的进步,机器人在人类生活中发挥着越来越重要的角色。
其中,关节机器人作为一种常见的机器人类型,具备灵活的动作和精确的控制能力,被广泛应用于工业生产、医疗护理、教育娱乐等领域。
关节机器人的动力学建模与控制是实现机器人自主运动和交互的核心技术之一。
本文将从动力学建模和控制两个方面,探讨关节机器人的相关问题。
一、动力学建模动力学建模是对机器人运动所涉及的力学现象和运动学关系进行描述和计算的过程。
在关节机器人的动力学建模中,常涉及到机器人的质量、惯性、摩擦、关节力矩等参数。
通过建立机器人的动力学模型,可以精确描述机器人的运动特性,为后续的控制算法提供准确的基础。
关节机器人的动力学模型主要包括基于牛顿-欧拉法、拉格朗日法和伪逆法等不同数学方法的建模。
牛顿-欧拉法是一种常用的动力学建模方法,基于牛顿定律和欧拉方程,通过考虑关节力矩、重力、惯性力和摩擦力等影响因素,得到机器人的动力学方程。
拉格朗日法则是另一种常用的动力学建模方法,通过对系统的动能和势能进行建模,得到机器人的拉格朗日方程。
伪逆法是一种简化的建模方法,通过使用伪逆矩阵来逼近机器人的动力学方程,简化了复杂的动力学计算过程。
二、控制算法控制算法是关节机器人实现自主运动和交互的重要手段。
在关节机器人的控制算法中,通常包括位置控制、速度控制和力控制等几种主要方式。
这些控制方式可以根据机器人的运动特性和任务需求来选择和应用。
位置控制是最常见的控制方式之一,通过控制机器人的关节位置,实现目标位置和实际位置的一致。
位置控制通常利用PID控制器或者模糊控制器进行实现,通过计算关节位置误差和误差的导数和积分,调节控制器输出,实现位置的精确控制。
速度控制是对关节机器人运动速度进行控制的方式,通过调节关节驱动器的转速,实现机器人的期望速度。
速度控制可以辅助实现精确的位置控制,同时可以快速响应外部环境的变化。
力控制是关节机器人实现力学任务和与人类交互的重要手段。
《6R工业机器人轨迹规划与控制研究》范文

《6R工业机器人轨迹规划与控制研究》篇一一、引言随着制造业的快速发展,工业机器人作为智能制造的重要设备,其在生产线上的应用日益广泛。
6R工业机器人以其灵活性和高效性在各种领域得到了广泛的应用。
其中,轨迹规划与控制技术作为机器人的核心研究内容,对于提高机器人的工作效率、运动精度和稳定性具有重要意义。
本文将重点研究6R工业机器人的轨迹规划与控制技术,探讨其相关理论、方法及实际应用。
二、6R工业机器人概述6R工业机器人是一种具有六个旋转关节的机器人,能够在三维空间内进行复杂的运动。
其运动学模型、动力学特性和控制策略是机器人研究的基础。
6R工业机器人具有高精度、高速度和高负载等特点,广泛应用于汽车制造、电子装配、食品包装等领域。
三、轨迹规划方法研究轨迹规划是6R工业机器人的重要研究内容,它决定了机器人的运动路径和速度。
本文将介绍几种常见的轨迹规划方法:1. 插补法:通过在关键点之间插入中间点,生成平滑的轨迹。
该方法简单易行,适用于对轨迹精度要求不高的场合。
2. 优化法:以机器人的运动学模型为基础,通过优化算法求解最优轨迹。
该方法可以提高机器人的运动精度和效率,但计算量较大。
3. 智能算法:如遗传算法、神经网络等,通过学习的方式获取最优轨迹。
该方法具有较高的自适应性和学习能力,但需要大量的训练数据。
四、控制策略研究控制策略是6R工业机器人的核心,它决定了机器人的运动稳定性和精度。
本文将介绍几种常见的控制策略:1. 经典控制策略:如PID控制、模糊控制等,通过设定阈值和规则来控制机器人的运动。
2. 现代控制策略:如自适应控制、鲁棒控制等,根据机器人的实际运动情况调整控制参数,提高机器人的适应性和稳定性。
3. 智能控制策略:如基于深度学习的控制策略,通过学习机器人的运动数据来优化控制策略,提高机器人的运动精度和效率。
五、实际应用与展望6R工业机器人的轨迹规划与控制在制造业中得到了广泛的应用。
通过合理的轨迹规划和控制策略,可以提高机器人的工作效率、运动精度和稳定性,从而降低生产成本、提高产品质量。
《6R工业机器人轨迹规划与控制研究》范文
《6R工业机器人轨迹规划与控制研究》篇一一、引言随着工业自动化技术的快速发展,6R工业机器人已成为现代制造业中不可或缺的一部分。
其高精度、高效率、高灵活性的特点使其在装配、焊接、搬运、喷涂等任务中发挥着重要作用。
为了进一步提高机器人的工作性能和效率,轨迹规划和控制技术的研究显得尤为重要。
本文旨在探讨6R工业机器人的轨迹规划与控制方法,以期为相关领域的研究提供一定的参考。
二、6R工业机器人概述6R工业机器人是一种具有六个旋转关节的机器人,能够完成复杂的空间运动。
其运动学模型和动力学模型相对复杂,因此轨迹规划和控制的难度也较大。
然而,由于其高度的灵活性和可编程性,使得6R工业机器人在各种工业应用中具有广泛的应用前景。
三、轨迹规划研究轨迹规划是6R工业机器人研究的重要一环,其目的是为了在给定的任务空间中规划出一条最优的路径,使得机器人在执行任务时能够快速、准确地到达目标位置。
目前,常见的轨迹规划方法包括插值法、优化法和智能算法等。
(一)插值法插值法是一种常用的轨迹规划方法,其基本思想是在关键点之间插入一条光滑的曲线,使得机器人在运动过程中能够达到预定的速度和加速度。
常见的插值法包括多项式插值、样条插值等。
(二)优化法优化法是一种以优化为目标的方法,其目的是在满足一定约束条件下,寻找最优的轨迹。
常见的优化法包括遗传算法、蚁群算法等。
这些算法能够在多个候选轨迹中寻找出最优的轨迹,从而提高机器人的工作效率和精度。
(三)智能算法智能算法是一种基于人工智能的轨迹规划方法,其基本思想是利用机器学习等技术,从历史数据中学习出最优的轨迹规划策略。
常见的智能算法包括神经网络、支持向量机等。
这些算法能够根据机器人的实际工作情况,自适应地调整轨迹规划策略,从而提高机器人的适应性和灵活性。
四、控制策略研究控制策略是6R工业机器人轨迹规划的重要一环,其目的是为了保证机器人能够准确地按照规划的轨迹进行运动。
目前,常见的控制策略包括经典控制策略、现代控制策略和智能控制策略等。
6R偏置腕关节摄影机器人逆运动学分析
DOI:10.3969/j.issn.2095-509X.2020.10.0086R偏置腕关节摄影机器人逆运动学分析阮德善ꎬ韩㊀军(南京理工大学机械工程学院ꎬ江苏南京㊀210094)摘要:以6R偏置腕关节摄影机器人为研究对象ꎬ采用D-H改进法建立运动学模型ꎮ进行了正运动学以及逆运动学求解ꎬ重点介绍逆解的计算过程ꎮ为了缩短逆运动学求解的时间ꎬ进一步将求解算法进行优化ꎮ采用MATLAB软件编写程序验证逆运动学求解的正确性ꎮ最后通过仿真实验表明运动学逆解能够使各个关节变化连续光滑ꎬ从而为摄影机器人的控制以及轨迹规划提供重要依据ꎮ关键词:摄影机器人ꎻ正运动学分析ꎻ逆运动学分析中图分类号:TH692.9㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:2095-509X(2020)10-0041-06㊀㊀目前摄影机器人已广泛应用于影视行业中ꎬ其最大优点是能够精确再现拍摄轨迹[1-2]ꎮ为了使摄像机可以灵活运动从而获得高质量的拍摄效果ꎬ摄影机器人的机械结构多数为多轴联动[3]ꎮ目前ꎬ6R摄影机器人使用广泛ꎬ其结构类似于工业机器人ꎮ6R摄影机器人腕关节结构一般可分为欧拉腕关节和偏置腕关节ꎮ欧拉腕关节的三轴交于一点ꎬ针对这种带有欧拉腕关节结构的6R摄影机器人可采用成熟的工业机器人理论进行相应的研究ꎮ在一些特殊情况下ꎬ6R摄影机器人末端需要装载摄像机及其相关配件ꎬ因此摄影机器人的末端结构需要承受较大的载荷ꎮ此外ꎬ6R摄影机器人往往需要较长的水平延伸和末端更大的旋转角度[4]ꎬ然而带有欧拉腕关节结构的摄影机器人难以满足上述要求ꎮ为此ꎬ可设计3个轴互不相交的偏置腕关节结构ꎮ但拥有此结构的6R摄影机器人其运动学方程往往变得很复杂ꎬ从而使求运动学逆解变得更加困难ꎮKucuk等[5]通过研究大量机器人结构指出ꎬ求6R偏置腕关节机的运动学逆解非常困难且仅能使用数值法进行求解ꎬ并指出在使用牛顿数值算法时易出现由于雅可比矩阵奇异而导致算法不收敛的情况ꎬ此外牛顿数值算法需要给出一组精确的初始向量ꎮZhao等[6]也通过雅可比逆矩阵研究了一种数学算法ꎬ但由于雅可比逆矩阵求解困难ꎬ而且当出现奇异时算法也无法收敛ꎮPashkevich[7]研究了一种适用于偏置腕关节机器人的逆运动学算法ꎬ该算法不使用雅可比矩阵ꎬ但当腕关节接近奇异点时ꎬ该算法就无法收敛ꎮ本文以6R偏置腕关节摄影机器人为研究对象ꎬ提出一种求解逆运动学问题的方法ꎬ然后采用MATLAB编程并验证逆解的正确性ꎮ此外ꎬ为了缩短求运动学逆解的时间ꎬ根据6R偏置腕关节摄影机器人的结构缩小第一个关节的搜索范围ꎮ1㊀摄影机器人运动学模型1.1㊀关节坐标系的建立建立摄影机器人运动学模型的一种有效方法是ꎬ在每一关节建立相应的坐标系ꎬ经过一系列坐标转换求得末端执行器对基坐标系的位姿矩阵ꎬ从而得到相应的运动学方程ꎮ而坐标系的建立方法会影响最后运动学方程的复杂程度ꎮ为了减少参数个数ꎬ本文中采用典型的D-H改进法建立摄影机器人各个关节的坐标系ꎮ根据D-H改进法得到相邻两个坐标系的齐次坐标转换矩阵[8-9]如式(1)所示ꎮi-1Ti=cθi-sθi0ai-1sθicαi-1cθicαi-1-sαi-1-disαi-1sθisαi-1cθisαi-1cαi-1dicαi-10001éëêêêêêùûúúúúú(1)式中:i-1Ti为第i坐标系相对于第(i-1)坐标系的收稿日期:2019-06-24作者简介:阮德善(1990 )ꎬ男ꎬ硕士研究生ꎬ主要研究方向为摄影机器人运动轨迹规划ꎬndthien@foxmail.com.通讯作者:韩军ꎬ女ꎬ副研究员ꎬhanjun7045@163.com.14 2020年10月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀机械设计与制造工程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀Oct.2020第49卷第10期㊀㊀㊀㊀㊀㊀㊀㊀㊀MachineDesignandManufacturingEngineering㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀Vol.49No.10齐次坐标转换矩阵ꎻθi为xi和xi-1之间的夹角ꎻαi-1为zi和zi-1之间的夹角ꎻai-1为zi和zi+1之间的距离ꎻdi为zi和zi-1之间的距离ꎻsθiꎬcθiꎬsαi-1ꎬcαi-1分别表示sinθiꎬcosθiꎬsinαi-1ꎬcosαi-1ꎮ1.2㊀摄影机器人运动学模型摄影机器人本体如图1所示ꎬ采用D-H改进法建立摄影机器人的各个关节坐标系ꎬ如图2所示ꎬ由此可得摄影机器人的参数ꎬ见表1ꎮ图1㊀6R摄影机器人本体图2㊀摄影机器人的各个关节坐标系表1㊀摄影机器人D-H改进法参数连杆iai-1/mmαi-1/(ʎ)θi/(ʎ)di/mm100θ102160-90θ2035600θ304130-90θ46005090θ50640-90θ60㊀㊀根据式(1)以及表1可得摄影机器人各个齐次坐标转换矩阵:㊀0T1=cθ1-sθ100sθ1cθ10000100001éëêêêêêùûúúúúú㊀1T2=cθ2-sθ20a10010-sθ2-cθ2000001éëêêêêêùûúúúúú㊀2T3=cθ3-sθ30a2sθ3cθ30000100001éëêêêêêùûúúúúú㊀3T4=cθ4-sθ40a3001d4-sθ4-cθ4000001éëêêêêêùûúúúúú㊀4T5=cθ5-sθ50000-10sθ5cθ5000001éëêêêêêùûúúúúú㊀5T6=cθ6-sθ60a50010-sθ6-cθ6000001éëêêêêêùûúúúúú2㊀正运动学分析将上面所有齐次坐标转换矩阵相乘可得出末端执行器坐标系相对于基坐标系的转换矩阵0T6为0T6=0T11T22T33T44T55T6(2)将式(2)的右边展开得出一个4ˑ4的矩阵ꎬ因此式(2)可改写为:0T6=nxoxaxpxnyoyaypynzozazpz0001éëêêêêêùûúúúúú(3)式中:n=[nxꎬnyꎬnz]Tꎬ为法线矢量ꎻo=[oxꎬoyꎬoz]Tꎬ为向量矢量ꎻa=[axꎬayꎬaz]Tꎬ为接近矢量ꎻp=[pxꎬpyꎬpz]Tꎬ为位置矢量ꎮ式(3)进一步改写成:0T6=Rp01éëêêùûúú(4)式中:R为姿态矩阵ꎮ式(3)即为摄影机器人的运动学方程ꎮ正运动学求解的目的就是通过各关节的转角求出末端执行器坐标系相对于基坐标系的位置矩阵p和姿态矩阵Rꎮ24 2020年第49卷㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀机械设计与制造工程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀将矩阵0T6展开ꎬ然后令矩阵里面的每个元素与式(3)右边的元素相等就能求出运动学正解:nx=s6(s1c4-c1s4c23)-c6[s5c1s23-㊀c5(s1s4+c1c4c23)]ny=-c6[s1s5s23+c5(c1s4-s1c4c23)]-㊀s6(c1c4+s1s4c23)nz=s4s6s23-c6(s5c23+c4c5s23)ox=s6[c1s5s23-c5(s1s4+c1c4c23)]+㊀c6(s1c4-c1s4c23)oy=s6[s1s5s23+c5(c1s4-s1c4c23)]-㊀c6(c1c4+s1s4c23)oz=s6(s5c23+c4c5s23)+s4c6s23ax=-c1c5s23-s5(s1s4+c1c4c23)ay=s5(c1s4-s1c4c23)-s1c5s23az=c4c5s23-c5c23px=a1c1-a5[c1s5s23-c5(s1s4+c1c4c23)]-㊀d6[c1c5s23+s5(s1s4+c1c4c23)]+a3c1c23-㊀d4c1s23+a2c1c2py=a1s1-a5[s1s5s23+c5(c1s4-s1c4c23)]-㊀d6[s1c5s23-s5(c1s4-c4s1c23)]+a3s1c23-㊀d4s1s23+a2c2s1pz=-a2s2-a3s23-d4c23-a5(s5c23+c4c5s23)-㊀d6(c5c23-c4s5s23)(5)式中:si=sinθiꎬci=cosθiꎻsij=sin(θi+θj)ꎬcij=cos(θi+θj)ꎮ本文使用MATLAB编写程序来验证运动学正解ꎮ设置各关节角度如图3所示ꎬ通过计算得出运动学正解如图4所示ꎮ此时ꎬ摄影机器人的位姿如图2所示ꎬ从而验证了运动学正解的正确性ꎮ图3㊀各关节的角度3㊀逆运动学分析3.1㊀逆运动学求解方法㊀㊀运动学逆解是当给定机器人末端执行器相对图4㊀运动学正解于基坐标系的位姿矩阵时ꎬ要求出各个关节的转角ꎮ逆运动学对机器人的轨迹规划和动力学分析具有重要意义ꎮ逆运动学的求解特点是计算量大ꎬ往往需要花费大量的时间ꎮ本文的研究对象为6R偏置腕关节摄影机器人ꎬ由于其结构较为特殊ꎬ无法用解析法求出运动学逆解ꎬ因此必须使用数值法进行求解ꎮ本文提出的数值法基本思路如图5所示ꎮ图5㊀数值法的基本思路㊀㊀对于第一个关节ꎬ在0ʎ~360ʎ内随机指定初始值θ1ꎬ因此θ1视为已知ꎮ将式(2)展开并令两边矩阵的相应元素相等ꎬ可以得到一个包含12个方程的方程组ꎬ利用这12个方程以及θ1的值就能求得θ2ꎬθ3ꎬθ4ꎬθ5ꎬθ6的值ꎮ之后ꎬ通过所求得θ2ꎬθ3ꎬθ4ꎬθ5ꎬθ6的值以及使用这12个方程中没使用过的方程反过来求得θi1的值ꎮ继续用θ2ꎬθ3ꎬθ4ꎬθ5ꎬθ6ꎬθi1这组解ꎬ通过运动学正解求出末端执行器的位姿ꎬ如果位置误差小于设定的误差值ꎬ计算结束ꎬ得到所需要的运动学逆解ꎮ否则将第一关节增加一定的角度ꎬ再重复以上计算过程直到位置误差满足要求为止ꎮ3.2㊀逆运动学求解过程假设θ1已知ꎬ采用式(2)以及合适的变换将其他关节角变量表示为θ1的函数ꎮ基本的变换思路是将要求的变量逐一移到式(2)的左侧ꎮ首先通过如下变换求出θ6ꎮ(0T1)-1(0T6)(5T6)-1=1T22T33T44T5(6)将式(6)展开ꎬ在等号两边找到仅包含θ1和θ6的元素令其相等可得:c1py-pxs1+a5s6(c1oy-oxs1)=a5c6(c1ny-nxs1)(7)㊀㊀令A=-(c1py-pxs1)/a5ꎬB=c1oy-oxs1ꎬC=342020年第10期㊀㊀㊀㊀㊀㊀㊀㊀㊀阮德善:6R偏置腕关节摄影机器人逆运动学分析c1ny-nxs1ꎬ从而可得:θ6=arctan2(CꎬB)+arctan2(AꎬʃB2+C2-A2)(8)观察式(6)的展开项ꎬ可得方程(9)和(10):a1+a2c2+a3c23-d4s23=D(9)-a2s2-a3s23-d4c23=E(10)其中:D=c1px+pys1+a5s6(c1ox+oys1)-a5c6(c1nx+nys1)ꎻE=-a5c6nz+a5ozs6ꎮ将式(9)和式(10)平方后相加得到式(11)ꎬ从而求出θ2ꎬ如式(12)所示ꎮEs2-Dc2=F(11)θ2=arctan2(DꎬE)+arctan2(FꎬʃD2+E2-F2)(12)其中:F=(a23+d24-D2-E2-a22)/(2a2)ꎮ将式(10)进行如下变换:a3s23+d4c23=E+a2s2ꎮ令F=E+a2s2ꎬ从而可得a3s23+d4c23=Fꎬ求出θ23=arctan2(d4ꎬa3)+arctan2(Fꎬʃa23+d24-F2)ꎬ从而可得θ3:θ3=θ23-θ2(13)为了求出θ4ꎬθ5ꎬ将式(6)继续变换ꎬ如式(14)所示ꎮ(0T1)-1(0T6)(5T6)-1(4T5)-1=1T22T33T4(14)将式(14)展开得到与θ4ꎬθ5有关的方程:s5G+c5H=0(15)-s4=c5G-s5H-c4=I(16)其中G=c6(c1ny-nxs1)-s6(c1oy-oxs1)ꎻH=ayc1-axs1ꎻI=c6(c1oy-oxs1)+s6(c1ny-nxs1)ꎮ从而可得:θ5=arctan2(Hꎬ-G)θ4=arctan2(c5G-s5HꎬI)(17)由此可知ꎬ所有关节变量均能表示成θ1的函数ꎮ现在假设其他关节变量已知ꎬ通过将式(2)进行如下变换来求θ1的值ꎮ㊀0T6(5T6)-1(4T5)-1(3T4)-1=0T11T22T3(18)将式(18)展开得到与θ1相关并且没使用过的方程组ꎬ如式(19)所示:-s1=s4[axs5-c5(c6nx-oxs6)]-㊀c4(c6ox+nxs6)c1=s4[ays5-c5(c6ny-oys6)]-㊀c4(c6oy+nys6)ìîíïïïïï(19)令P=s4[axs5-c5(c6nx-oxs6)]-c4(c6ox+nxs6)ꎬQ=s4[ays5-c5(c6ny-oys6)]-c4(c6oy+nys6)ꎬ从而可得:θ1=arctan2(-PꎬQ)(20)逆运动学问题求解流程如图6所示ꎮ逆解计算过程涉及到位置绝对误差ε和θ1每次循环增加的角度Δθ1ꎮ图6㊀逆运动学问题求解流程3.3㊀逆运动学算法优化由3.2节可知ꎬ所提出的逆解计算过程要先给出θ1的初始值㊁位置绝对误差ε和θ1每次循环增加的角度Δθ1ꎮ而ε一般要事先确定下来(本文中设置ε为0.01mm就能满足要求)ꎬ因此为了提高算法的精度以及满足误差要求ꎬΔθ1需要尽量取小ꎬ本文设置Δθ1为0.001ʎꎬ理论上可以在0ʎ~360ʎ任意选择ꎮ但是θ1的初始值的选择会影响到运动学逆解的计算时间ꎬ因此θ1的初始值应该越接近实际角度值越好ꎮ此外ꎬ每次循环θ1自增微小角度Δθ1ꎬ从而θ1的初始值应该要小于实际角度值才能缩短计算时间ꎮ为了缩小θ1初始值的范围ꎬ将式(2)进行变换ꎬ如式(21)所示:(0T1)-1(0T6)=1T22T33T44T55T6(21)将式(21)展开得到方程如式(22)ꎬ从而求出θ1ꎬ如式(23)所示ꎮpxs1-pyc1=a5s4c5(22)θ1(k)=arctan2(pyꎬpx)+arctan2(a5kꎬb-a25k2)(23)其中:k=s4c5ɪ[-1ꎬ1]ꎻb=p2x+p2yꎮ在式(23)中只有k为未知变量且其值在[-1ꎬ1]ꎮ为了求出θ1的最小值ꎬ将式(23)对k进行求导得:̇θ1(k)=a5b/[(b-a5k2)b-a5k2](24)从式(24)可以看到ꎬ对于所有kɪ[-1ꎬ1]ꎬ44 2020年第49卷㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀机械设计与制造工程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀̇θ1(k)>0ꎬ因此θ1(k)在k为-1处将得到最小值ꎬ如式(25)所示ꎮθ1min=arctan2(pyꎬpx)+arctan2(-a5ꎬb-a25)(25)分析式(22)可知ꎬ当θ4为0ʎ或者θ5为90ʎ时ꎬ可以直接求得θ1的值为arctan2(pyꎬpx)ꎮ3.4㊀运动学逆解验证首先给出末端执行器对基坐标系的位姿矩阵(见表2)ꎬ采用3.2节的计算过程求运动学逆解ꎬ然后使用这组逆解通过正运动方程求出末端执行器的位姿矩阵ꎮ此时ꎬ将通过逆解所求出末端执行器的位姿矩阵与已知末端执行器的位姿矩阵进行比较并分析可判断算法的正确性ꎮ表2㊀末端执行器对极坐标的位姿矩阵位置noap/mm10.75290.20990.6236703.054-0.0198-0.94000.3403320.4360.6577-0.2686-0.7037400.35920.30300.66450.6830415.2680.0574-0.72810.6830415.2680.9512-0.1677-0.25881049.27230.2986-0.71900.6275657.062-0.6266-0.6436-0.4393-491.4670.7198-0.2620-0.6427288.878㊀㊀采用MATLAB编写程序ꎬ经过计算可得运动学逆解ꎬ见表3ꎮ其中εr为实际位置误差ꎬt为求解时间ꎮ在每一例子中ꎬ采用公式(25)可以求出θ1初始角度θ01ꎮ由表3可知:首先ꎬθ01的值非常接近θ1的实际值ꎬ因此每个例子的计算时间都是非常短ꎮ特别在第二个例子ꎬ计算时间只有0.001sꎬ是其他两个例子计算时间的几十分之一ꎮ其原因是因为θ1的初始角度就是θ1的实际值ꎬ所以只需要计算一遍就得出结果ꎬ此时关节4的角度为0ʎꎮ其次ꎬ逆解的计算时间都很小ꎬ并且实际位置误差远小于设定的误差值ꎮ从这点可以得出ꎬ当设定的误差值足够小时则运动学逆解的准确性满足设计和轨迹规划要求ꎮ为了减少计算时间并且满足逆解的精度要求ꎬ可以设定合适的位置误差(本文设定位置误差为0.01mm)ꎮ最后ꎬ从第三个例子可以看到运动学逆解中θ5为零ꎬ此时第4轴和第6轴平行ꎬ机器人处于奇异点ꎬ从而说明本文在3.2节所给出逆解的计算过程在奇异点仍然有效ꎮ表3㊀运动学逆解位置εr/10-13mmt/s运动学逆解/(ʎ)θ01θ1θ2θ3θ4θ5θ618.20.0152425-903010151022.50.0014545-90-350501034.10.046-36-35-8030400-20㊀㊀为了进一步说明本文所提出的逆运动学求解方法的可行性ꎬ将摄像机固定在摄影机器人末端ꎬ假设摄影机器人带动摄像机在z0=600平面(O0z0垂直于纸面朝外)沿着A1B1C1圆弧段运动ꎬ圆弧的圆心为M(400ꎬ0ꎬ600)ꎬ半径为2003ꎮ在摄像机镜头上建立坐标系OCxCyCzCꎮ其中ꎬOCxC为镜头面的法线ꎬOCyC为镜头面的切线ꎬ根据右手法则确定OCzCꎮ假设摄像机运动过程中OCxC总是穿过M点ꎬOCzC保持垂直于纸面朝内ꎬ如图7所示ꎮ图7㊀摄像机坐标系的建立㊀㊀摄像机坐标系对基坐标系的位姿矩阵为0TCꎬ为了求出摄像机在运动过程中各个关节的变化ꎬ需要摄像机在圆弧上每一位置相应的位姿矩阵0T6ꎮ0T6位姿矩阵可以通过式(26)求出ꎮ由于0TC=0T66TCꎬ所以有0T6=0TC(6TC)-1(26)式中:6TC为摄影机坐标系对第六关节坐标系的位姿矩阵ꎮ由于摄像机固定在摄影机器人的末端ꎬ因此6TC位姿矩阵为已知ꎮ将圆弧段插补500个点ꎬ采用MATLAB软件编写程序得到各关节的角度曲线ꎬ如图8所示ꎮ从图中可以清楚地看出ꎬ逆运动学求解方法得到的角度曲线是连续光滑的ꎬ进一步表明方法的可行性以及正确性ꎮ4㊀结束语本文以6R偏置腕关节摄影机器人为研究对象ꎬ采用D-H改进法建模之后ꎬ进行了正运动学和逆运动学的求解ꎮ由于摄影机器人的机械结构有些特殊ꎬ逆运动学问题仅能采用数值法进行求542020年第10期㊀㊀㊀㊀㊀㊀㊀㊀㊀阮德善:6R偏置腕关节摄影机器人逆运动学分析图8㊀各关节变化曲线解ꎮ经过运动学逆解验证表明ꎬ本文所提出的求解过程不仅收敛速度快㊁精度高ꎬ而且出现奇异时算法也能快速收敛ꎮ假设摄像机沿着一条圆弧运动ꎬ通过本文的运动学逆解可得各个关节变化曲线连续光滑ꎬ进一步验证了逆解的正确性ꎬ从而为摄影机器人的控制以及轨迹规划提供了重要的依据ꎮ参考文献:[1]㊀贺京杰ꎬ汪苏.摄影机器人发展现状和分析[J].现代电影技术ꎬ2015(6):45-48.[2]㊀贺京杰ꎬ汪苏ꎬ王春水.虚拟制作中摄影机器人作用分析[J].现代电影技术ꎬ2017(10):44-45.[3]㊀张博ꎬ王南ꎬ王泽仁.基于SolidWorks的摄影机器人虚拟设计与运动分析[J].河北工业科技ꎬ2014(1):24-26. [4]㊀张启敏.机器人摄像机的技术特点与应用分析[J].现代电视技术ꎬ2014(3):68-70.[5]㊀KUCUKSꎬBINGULZ.Inversekinematicssolutionsforindustrialrobotmanipulatorswithoffsetwrists[J].AppliedMathematicalModellingꎬ2014ꎬ38(7/8):1983-1999.[6]㊀ZHAOYꎬHUANGTꎬYANGZ.Anewnumericalalgorithmfortheinversepositionanalysisofallserialmanipulators[J].Robot ̄icaꎬ2006ꎬ24(3):373-376.[7]㊀PASHKEVICHA.Real-timeinversekinematicsforrobotswithoffsetandreducedwrist[J].ControlEngineeingPracticeꎬ1997ꎬ10(5):1443-1450.[8]㊀蔡自兴.机器人学[M].1版.北京:清华大学出版社ꎬ2000. [9]㊀赵宇豪ꎬ韩军ꎬ欧屹.基于D-H法的摄影机器人运动学分析[J].组合机床与自动化加工技术ꎬ2018(5):11-13.Theinversekinematicsanalysison6RoffsetwristcamerarobotRuanDeshanꎬHanJun(SchoolofMechanicalEngineeringꎬNanjingUniversityofScienceandTechnologyꎬJiangsuNanjingꎬ210094ꎬChina)Abstract:Takingthe6RoffsetwristcamerarobotastheresearchobjectꎬitusesthemodifiedD-Hmethodtoestablishthekinematicsequationsꎬsolvesforwardkinematicsandinversekinematicsꎬshowstheprocessofin ̄versekinematicssolution.Inordertoshortenthetimeofinversekinematicssolutionꎬthealgorithmisfurtherop ̄timized.ItwritesaMATLABprogramtoverifythecorrectnessoftheinversesolutionꎬgivesanexampletoshowthattheinversekinematicssolutioncanmakethechangecurveofeachjointcontinuousandsmooth.Thispro ̄videsabasisforthecontrolandtrajectoryplanningofthecamerarobot.Keywords:camerarobotꎻforwardkinematicsanalysisꎻinversekinematicssolution642020年第49卷㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀机械设计与制造工程㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀。
6R工业机器人运动仿真与轨迹规划中期报告

6R工业机器人运动仿真与轨迹规划中期报告一、研究背景和意义随着现代工业的不断发展,工业机器人越来越受到重视,已成为工业自动化的重要组成部分。
而工业机器人的运动仿真和轨迹规划则是机器人控制系统设计的重要环节。
在机器人运动控制中,对产生的轨迹进行规划并控制机器人运动,实现机器人在空间中高精度的运动,是机器人控制的核心问题。
因此,针对工业机器人运动仿真和轨迹规划,进行相关研究和开发具有重要的理论和应用价值。
二、研究内容和方法本文的研究内容主要包括6R工业机器人运动仿真和轨迹规划。
首先,根据工业机器人的动力学模型,建立6R机器人的运动学模型,并采用MATLAB工具箱对模型进行数值计算和仿真,验证模型的正确性。
其次,针对机器人的轨迹规划问题,基于基于贝塞尔曲线的轨迹规划算法,结合机器人的工作空间和其他约束条件,对机器人的轨迹进行规划和优化。
最后,针对机器人的运动控制问题,探讨机器人的电机控制、力矩控制和PID控制等问题,从而实现机器人运动的高精度和稳定性。
三、研究进展和成果目前,我们已完成了6R工业机器人的动力学模型的建立,验证了模型的正确性。
同时,我们也初步探讨了6R机器人的轨迹规划和优化方法。
下一步,我们将继续深入研究机器人的轨迹规划和优化算法,探讨机器人的运动控制问题,并对结果进行仿真和实验验证,以取得更加实用和可靠的方法和技术。
四、存在的问题和未来展望在研究过程中,我们也遇到了一些问题,比如模型的精度不够高、算法的复杂性等等。
在未来的研究工作中,我们将继续优化模型和算法,并实践验证,以提高研究结果的可靠性和实用性。
同时,我们也将探讨机器人运动仿真和轨迹规划在其他领域的应用,以进一步扩展研究范围和应用前景。
6R关节型机器人轨迹规划算法研究及仿真教程
山东理工大学硕士学位论文6R关节型机器人轨迹规划算法研究及仿真姓名:刘好明申请学位级别:硕士专业:机械电子工程指导教师:王效岳20080420山东理丁人学硕十学位论文摘要摘要工业机器人是机器人中的一个重要分支,是机器人领域的重要研究发展方向。
对工业机器人运动轨迹规划和控制的研究,一直受到人们的普遍关注。
关节型工业机器人以其工作范围大、动作灵活、结构紧凑等特点在机器人中备受设计者和使用者青睐。
本文基于模块化设计思想,设计实现一定焊接任务的AS.MR0bot6R关节型机器人,采用D-H法对该关节型机器人的机构和运动学进行分析,建立了该关节型机器人的运动学模型;根据目标路径,求出机器人的逆解,在关节空间和操作空间轨迹规划过程中,分别利用模糊C均值聚类算法、最邻近和K均值聚类的综合应用来训练网络,实现了ImF神经网络的改进,并用该算法实现了轨迹优化,达到了轨迹规划的快速收敛和近似逼近,具有很强的容错能力,避免了因约束点的输入顺序和野值产生的影响,使得规划轨迹达到工程上的要求,从而验证了该算法的可行性。
然后应用虚拟样机技术,在机械系统动力学软件AD舢vIS上建立该Asm依0bot6R关节型机器人的仿真模型,按照已经规划好的末端工具运动轨迹,对实验过程进行轨迹规划仿真,并研究了该关节型机器人的运动学指标在仿真运动过程中的变化情况。
从理论分析和仿真实验结果的一致性,证明了该改进的I国F神经网络算法的有效性、合理性和在轨迹规划方面的可行性。
改进的RBF神经网络算法可以用于关节型机器人教学或在使用关节型机器人的工业环境中进行仿真演示或实时检测,为机器人轨迹规划优化算法的研究提供了理论上的有力支持,具有较高的应用价值。
关键词:工业机器人;运动学;轨迹规划;RBF神经网络;聚类;虚拟样机山东理T人学硕Ij学位论文Abs仃actAbStraCtAsanimportamb1.觚chi11therobotfIamily'iIldl倒时rdbotanddeVelopment面emation.The蛔ject0巧p1黜血gdesi弘eraIldB2Lsedallserits咖lisanilIlI,ortantrese锄chandhaVebeeIlpaideIlou曲a:tt枷onbyresearchersiIlthe、Ⅳorld.hlmegroupofmbots,Ⅱleaniculatedrd)otiscaredbyf.0ritsbroadworkrallge,fleXiblemoVenlent狃dc伽叩actS廿uc嘶.achieveareonmodul碰zation,d商盟a6DOFmaIlipulacorAS一瑚R0bot6Rwhichcallcertaillassi缪mlem.h廿lispaper,mekiIl锄acicsa11d锄alyzedthebymeanSofDeIl撕t-Hartellbe唱m甜10d,ulenareme鼢aticaldyn锄icsofmeandmanipulatordyll锄icmodeloftoilllproVedRBFmallipulatoreSta:blistled.Anerthei11versekineIIlaticsofrdbotbeings01vedwimⅡ1epamiIlhadp0硫edNeturalp础,mem嘶onjoil】庀sspacew嬲opt妇izedaCC删ngN咖ork、7l耘chbeell埘nedbyFllzzyCapplicationofnearestandKmeaIlscluste打ngdIⅡ缸gpl础g.T11is面mmeticMeansclust甜ngandⅡleg肌eralmal(eⅡ1ef掇tlleconve唱ence锄dmista:ke锄al謦IlIla缸on姗e仇leaIldavoidmeiIlf&tionoftlleinputofderofexist饥ceofⅡlemeres砸ctedpoint甜ldtlleerracic洲atchnum嘶calValue,aIlda出eVes嘲uestofthep删ect,allofⅡ1isvalidatesitsM妇gacc删nguseofmevimlalpr0咖iIlge丘硎Velless锄dfe硒ibil咄tec王1110log弘Ⅱ1emallipul砷or‟smodelisfoundedillofmechallicalso脚areADAMSⅡ1atdevelopedfordynaIllics狮alySissyst锄.Fuml咖ore,t0meplallodpam,mech觚gesofmecilleIIlatic砒lddyn砒lliciIldexesofⅡlecourseaniculatIcdmaIlipulatori11theⅡlisapproachrobotareofmoviIlgarestudied.Thee岱oct~eIlessandValidi锣ofaproVedbyⅡle0瞅ical锄alySisa11d幽ulationresu坻.n谢Uhelpi叫)roVedRBF10tiIlt11ete犯11iIlg,desigllil唱,researClling锄dselectillg.111isnetul面n舐vod【a打Ⅱlmetich舔greatapplicationvalue锄dpr0Videstheor以cill如nnation南r吐le臼匈ecto巧pl础gKeyofrobot.words:hldu呻Robot;陆eIllalics;删eCt吖P1锄ing;C1埘e血g;ⅦtualmtotypeRBFNetu]ralN咖础;独创性声.明本人声明所呈交的论文是我个人在导师指导下进行的研究工作及取得的研究成果。
《6R工业机器人轨迹规划与控制研究》范文

《6R工业机器人轨迹规划与控制研究》篇一一、引言随着科技的快速发展和制造业的不断升级,工业机器人作为智能生产的重要部分,其在制造流程中的应用逐渐成为业界研究的热点。
尤其是6R(六个旋转轴)工业机器人,其多关节的灵活性和高精度的运动控制能力,使得它在装配、焊接、搬运等复杂任务中发挥着重要作用。
本文旨在研究6R工业机器人的轨迹规划与控制技术,以提高其工作效率和作业精度。
二、6R工业机器人概述6R工业机器人,指的是具有六个旋转轴的工业机器人,具有高度灵活性和高精度的工作能力。
它能够在复杂的作业环境中进行精准的定位和操作,是实现自动化、智能化生产的关键设备。
其工作原理是通过电机驱动各个关节的旋转,从而实现机器人的运动。
三、轨迹规划轨迹规划是工业机器人作业过程中的重要环节,它决定了机器人运动的速度、加速度以及位置等信息。
一个好的轨迹规划可以提高机器人的工作效率,同时也可以保证作业的精度和稳定性。
对于6R工业机器人而言,轨迹规划主要包括以下步骤:1. 任务分析:根据作业需求,分析机器人的运动轨迹和姿态变化。
2. 路径规划:根据任务分析结果,确定机器人的运动路径。
3. 速度与加速度规划:在路径规划的基础上,进行速度和加速度的规划,以实现平滑的运功过程。
4. 优化:通过优化算法对轨迹进行优化,以减小运动过程中的能量消耗和机械磨损。
四、控制策略控制策略是工业机器人实现精准运动的关键。
对于6R工业机器人而言,其控制策略主要包括以下方面:1. 运动学控制:通过建立机器人的运动学模型,实现精确的位置和姿态控制。
2. 动力学控制:根据机器人的动力学特性,进行速度和力的控制,以保证机器人在运动过程中的稳定性和安全性。
3. 智能控制:通过引入人工智能技术,实现机器人的自主学习和决策能力,提高机器人的智能水平和工作效率。
五、实验与分析为了验证本文提出的轨迹规划与控制策略的有效性,我们进行了相关实验。
实验结果表明,经过优化后的轨迹规划能够显著提高6R工业机器人的工作效率和作业精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
r os,o lil ou insf riv r e kne t q ai n r t d e o q a in s d i h a tc lc nr lo ot rmutp e s l to o n e s i ma i e u to swe esu id fre u t su e n t eprc ia o to f c o
M o e i g a d i p e e tn h n e s i e a i s o d ln n m lm n i g t e i v r e k n m tc f
as e ouejitrb t i rv lt on o o x
WA G L—u n ,LU Bn —a N i a I igh o ,WU Ja — n H nf —u U Z e gy q inr g , a nh a ,L h n —u o i
设 置方 式 , 需 要 经 常 更 换 作 业 工 具 的 多机 器 人 系统 中更 为 适 用 . 在 推导 过 程 只需 2次 矩 阵逆 乘 , 骤 简 单 . 于 V 步 基 C+ +和 O eG p n L技 术 编 制 了系 统 程 序 , 验 了方 法 的有 效 性 . 检 以其 中 一 个 位 姿 为 例 , 比几 何 方 法 得 出 的 结 果 , 证 了 对 验 算 法 的 正确 性 . 究 的结 果 适 用 于 MO O N U 6和 P M 5 0等 相 似 构 型 的所 有 机 器 人 . 研 T MA —P U A6 关 键 词 : 运 动 学 ; 器 人 ; 数解 法 逆 机 代 中 图分 类号 : P4 文 献标 识码 : 文 章 编 号 :6 3 8 (00)2 )5 4 T2 1 A 17  ̄7 5 2 1 0 416 ) 5
( . ol eo M c a i l n lc i l n ier g a i E gn e n nvri , abn1 0 0 ,C ia 1 C l g f e h nc d E e tc g ei ,H r n n ie r gU i s y H ri 5 0 1 hn ) e aa raE n n b i e t
摘 要 : 满 足 新 开 发 的 多 机 器 人 实验 系统 编程 需要 , 究 了 6 机 器 人 运 动 学 逆 解 问 题 . 导 际控制 系统时 , 逆解 的漏解 、 增根和多解问题 . 与传统方法 比较 , 采用 了便 于程序模块化 的坐标系
第 5卷 第 2期
21 0 0年 4月
智
能
系
统
学
报
Vo . № . 15 2
Ap . 01 r2 0
CAAITr n a t n n I t l g n y t ms a s c i s o n e l e tS se o i
d i1 . 9 9 j i n 1 7 4 8 . 0 0 0 . 1 o :0 3 6 / . s . 6 3 7 5 2 1 . 2 0 0 s
we e d v lp d. T i le r i o u in r h n d rv d. Co d t n a sn h r oben ou in,e ta e u r e e o e herag b a c s l t swe e t e e ie o n i o sc u i gt e e t o s l to i xr n o s
6 节 型 机 器 人 运 动 学 建 模 R关
王立权 刘秉昊 吴健 荣。韩金 华 卢正宇 , , , ,
( . 尔滨 工程 大学 机 电工程 学院, 1哈 黑龙 江 哈 尔滨 10 0 ; . 尔滨工程大 学 自动化学院 , 50 1 2 哈 黑龙江 哈 尔滨 10 0 ) 5 0 1
a s e ii o iin a n e a l p cfc p sto sa x mp e,we p o e he c re t e so h lo i m y c m p rng i e ul o t o efo r v d t o r cn s ft e ag rt h b o a i t r s t t h s r m s s g o erc a ay i. Th e e rh i p lc b e t t e o o y tms wi i lr me h n c lc n g r t n e m ti n lss e r s a c s a p i a l o oh rr b ts se t smia c a ia o f u a i s,s c h i o uh a OTOM AN — 6 o sM UP rPUM A5 0. 6 Ke wor y ds:iv re k n ma is r b t ag b ac s l in n e s i e t ;o o ; le r i out c o
i g to sa e fe u n l e l c d Aso l wo i v re marc swe e i v le n o l r r q e ty r p a e . n y t n e s tie r n o v d,te meh d wa i l n a y.I h t o s smp e a d e s n o d rt eiy t e ef cie e s o h to r e o v rf h fe tv n s ft e meh d.i wa o ie sn t sc mp l d u i g VC + a e + nd Op nGL s fwae.Afe ee tn o t r t rs l ci g
Abta tT rga e utrb t yt , n es kn m t q a o sf i rvlt ji 6 src :oporm an w m l— o ss m ivr ie ai e ut n o as eo e o t( R)rbt io e e c i r x u n oo
a s se . Co p r d wih ta iina eh d ,t i eh d i r ut b e fra mu t—o ts se i y tm m a e t r d to lm t o s h sm t o s mo e s i l lirbo y tm n whih wo k a o c r—