UKF在惯导平台误差系数辨识离心机测试中的应用_英文_
仪器分析常见术语英汉对照
仪器分析常见术语英汉对照Chapter 1 Preface/绪论analytical chemistry/chemical analysis/ instrumental analysis/分析化学/化学分析/仪器分析spectral analysis/光谱分析 electroanalytical chemistry/电分析化学chromatography/色谱法 methods for inorganic species/ 无机物的分析 methods for organic and biochemical species/有机物、生物化学物质的分析description of validation parameters/有效参数的描述precision/精密度 accuracy/准确度 sensitivity/灵敏度 detection limit/检出限quantitation limit/定量限 linearity/线性 linear range/线性范围absolute error/绝对误差 relative error/相对误差 systematic error/系统误差determinate error/可定误差 accidental error/随机误差 indeterminate error/不可定误差debiation/偏差 average debiation/平均偏差 relative average debiation/相对平均偏差 standerd deviation;S/标准偏差(标准差) relatibe standard deviation;RSD/相对平均偏差coefficient of variation/变异系数 propagation of error/误差传递 significant figure/有效数字 partial least squares method ,PLS/偏最小二乘法Chapter 2 Introduction to Optical Methods of Analysis/光学分析导论properties of electromagnetic radiation/电磁辐射的性质 wave properties/波性质 the particle Nature of light: photons/光的粒子性质 interaction of radiation and matter/辐射与物质的相互作用 the electromagnetic spectrum/电磁波谱spectroscopic measurements/光谱测量 radiation absorption/辐射吸收 absorption process/吸收过程 absorption spectra/吸收光谱 limits to Beer's Law/比尔定律的局限性 qualitative sqectrometric analysis/光谱定性分析semiquantitative spectrometric analysis/光谱半定量分析 quantitative spectrometric analysis/光谱定量分析 instruments for optical spectrometry/光谱仪器 spectrophotometer /光谱仪instrument components/仪器的组成部件 optical materials/光学材料 spectroscopic sources/光源 wavelength selectors/单色器 sample containers/样品池spectrophotometer/分光光度计 single beam spectrophotometer/单光束分光光度计double beam spectrophotometer/双光束分子光光度计 dual wavelength spectrophotometer/双波长分光光度计 colorimeter/比色计 visual colorimeter/目视比色计 photoelectric coolorimeter/光电子比色计 holographic grating/全息光栅interference filter/干涉滤光片 calibration filter/校准滤光片 neutral filter/中性滤光片 absorption cell/cuvette/吸收池/比色皿 photocell/photovoltaic cell/光电池photomultiplier/光电倍增管 detecting and measuring radiant energy/辐射能检测signal processors and readouts/信号处理和数据输出molecular Luminescence Analysis/分子发光分析 molecular fluorescence spectroscopy/分子荧光分光光度法 theory of molecular fluorescence/分子荧光光谱法理论 effect of concentration on fluorescence intensity/影响荧光强度的因素 molecular phosphorescence/分子磷光 chemiluminescence methods/化学发光法Chapter 3 Atomic Emission Spectrometry(AES)/原子发射光谱origins of atomic spectra/原子光谱的起源 formation of atomic emission spectra/原子发射光谱的产生 outer electron/外层电子 electron transition/电子跃迁production of atoms and ions/原子和离子的产生 excited potential/激发电位ionization potential/电离电位 transition rule/跃迁定则 energy level diagram/能级图 characteristic spectrum/特征光谱 spectrum line intensity /谱线强度self-absorption and self reversal of spectrum line /谱线的自吸与自蚀 atomization efficiency/原子化效率 atomic line/原子线 resonance line/共振线 sensitive line/灵敏度 Boltzmann distribution/波尔兹曼分布定律 Boltzmann factor/波尔兹曼因子Boltzmann constant/波尔兹曼常数 device and instrument of AES /原子发射光谱分析装置与仪器 types and process of AES /仪器类型与流程 slit/ 狭缝 diffraction grating/衍射光栅 steeloscope/看谱镜 photoelectric direct reading spectrometer/光电直读光谱计 flame photometer/火焰光度计 excitation light source/激发光源 spectrum projictor/映谱仪 spectral photographic plate/光谱感光板microphotometer,microdens-tometer/测微光度计 spectrograph/摄谱仪 plsma source/等离子体[光]源 glow discharge/辉光放电 high firequency discharge/高频放电inductively coupled high frequency plasma torch/电感耦合高频等离子体焰炬capacitively coupled high frequency plasma torch/电容耦合高频等离子体焰炬capacitively coupled microwave plasma torch/电容耦合微波等离子体焰炬 laser microprobe/激光微探针 plate/相板(又称干板) flame spectrometer /火焰光度计 arc and electric spark emission spectrometer/电弧和电火花发射光谱仪 sample introduction systems/样品引入系统 multi-element/多元素 plasma sources/等离子体光源 electrothermal atomizers/电热原子化器 other atomizers/其它原子化器 sources of nonlinearity in atomic emission spectrometry/非线性光源plasma emission spectrometry/等离子发射光谱 direct current plasma jet(DCP)/直流等离子体喷焰 inductively coupled plasma(ICP)/电感耦合等离子体 principle and feature of ICP-AES /电感耦合等离子体发射光谱原理和特点 microwave induced plasma( MIP)/微波感生等离子体 interferences in plasma and flame atomic emission spectroscopy/等离子体和火焰原子光谱中的干扰 matrix interference/基体干扰photomultiplier tube (PMT)/光电倍增管 charge injection detector(CID)/电荷注入式检测器 qualitative and quantitative analysis method /定性和定量分析方法linear dispersion/曲线 angular dispersion/线色散 angular dispersion/角色散reciprocal linear dospersion/倒数线色散 resolving power,resolution/分辨本领spectral line interfernce/谱线干扰 spectral interference/光谱干扰 ionization interference/电离干扰 chemical interference/化学干扰 emission interference/发射干扰 matrix modifier/基体改进剂 spectral buffer/光谱缓冲剂 background absorption/背景吸收 maximum absorption/最大吸收 molecular absorption/分子吸收background absorption Correction/背景吸收校正 enhancement effect/增感效应depression effect/抑制效应Chapter 4 Atomic Absorption Spectrometry and Atomic Fluorescence Spectrometry /原子吸收光谱和原子荧光光谱absorption line/吸收线 resonance line/共振线 line profile/分析线 line profile/谱线轮廓 line width/谱线宽度 entegrated absorption method/积分吸收法 peak absorption method/峰分吸收法 Zeeman effect/塞曼效应 atomization/原子化 line width effects in atomic absorption/原子吸收中的变宽效应 flame atomic absorption/火焰原子吸收 relaxation processes/弛豫过程 atomic absorption with electrothermal atomization/ 原子吸收与电热原子化 interferences in atomic absorption/原子吸收中的干扰 fame atomizers/火焰原子化器 atomic fluorescence spectrometry/原子荧光光谱法 fluorescent species/荧光物质类型 fluorescence instruments/荧光光谱仪applications of fluorescence methods/荧光法的应用Chapter 5 Ultraviolet and Visible Absorption Spectroscopy/紫外-可见吸收光谱ultraviolet-visible absorption spectrometry/紫外可见吸收光谱 ultraviolet-visible photometers and spectrophotometers/紫外—可见分光光度计 spectrophotometric methods/分光光度法 apsorbing species/吸收类型 single-beam Instruments/单光束分光光度计 double-beam instruments/双光束分光光度计 multichannel instruments/多通道仪器 shoulder peak/肩峰 end absorbtion/末端吸收 chromophore/吸收生色团auxochrome/助色团 electron donating group/供电子取代基 electron with-drawing group/吸电子取代基 red shift/红移 blue shift/蓝(紫)移 bathochromic shift/长移hypsochromic shift/短移 hyperchromic effect/增色效应(浓色效应) hypochromic effect/减色效应(淡色效应) strong band/强带 weak band/弱带 absorption band吸收带 transmitance,T/透光率 absorbance/吸光度 band width/谱带宽度 stray light/杂散光 noise/ 噪声 dark noise/暗噪声 signal shot noise/散粒噪声 blazed grating/闪耀光栅 holographic graaing/全息光栅 photodiode array detector/光二极管阵列检测器convolution spectrometry/褶合光谱法 convolution transform,CT/褶合变换 wavelet transform,WT/离散小波变换 multiscale analysis/多尺度细化分析Chapter 6 Infrared Absorption Spectroscopy/红外吸收光谱infrared ray,IR/红外线 mid-infrared absorption spectrum/Mid-IR/中红外吸收光谱far infrared /Far-IR/远红外 near infrared/近红外 microwave spectrum,MV/微波谱infrared spectroscopy/红外吸收光谱法 infrared spectrophotometry/红外分光光度法mode of vibration/振动形式 stretching vibration/伸缩振动 symmetrical stretchingvibration/对称伸缩振动 asymmetrical stretching vibration/不对称伸缩振动 bending vibration/弯曲振动 formation vibration/变形振动 in-plane bending vibration,β/面内弯曲振动 scissoring vibration,δ/剪式振动 rocking vibration,ρ/面内摇摆振动out-of-plane bending vibration,γ/面外弯曲振动 wagging vibration,ω/面外摇摆振动twisting vibration ,τ/蜷曲振动 symmetrical deformation vibration ,δs/对称变形振动 asymmetrical deformation vibration, δas/不对称变形振动 ring prckering vibration/环折叠振动 charateristic avsorption band/特征吸收峰 characteristic frequency/特征频率 correlation absorption band/相关吸收峰 hybridization affect/杂化影响 ring size effect/环大小效应 intensity of absorption band/吸收峰的强度deactivation/去活化过程 vibrational relaxation(VR)/振动弛豫 vibration spectrum/振动光谱 internal Conversion(IC)/内转换 external conversion(EC)/外转换intersystem conversion(ISC)/系间跨跃 dichroism/二色性 wave number calibration/波数校准 group frequency/基团频率 cell-in -cell-ort method/池入-池出法 baseline/基线法 stray light/杂散法 infrared spectrophotometers/红外分光光度计 infrared absorption spectra/红外吸收光谱 absorption intensity/吸收强度 fundamental frequency band/基频谱带 spurious band/乱真谱带 vibrational-rotational spectrum/振转光谱 instruments for infrared spectroscopy/红外光谱仪器fourier transform infrared spect-rometer(FTIR)/傅里叶这换红外光谱计 infrared source/红外光源 infrared beam condenser/红外光束聚光器 infrated polarizer/红外偏振器 studies of complex ions/络合物研究 dispersive infrared instruments/色散型红外光谱仪 fourier transform instruments/傅立叶变换红外光谱仪Chapter 7 Nuclear Magnetic Resonance (NMR) Spectroscopy/核磁共振波谱学introduction to NMR Spectroscopy/核磁谱的简介 definition of NMR Spectroscopy/核磁谱学的定义 NMR History/核磁的历史 properties of nuclei/核的性质 nuclear magnetic resonance,NMR/核磁共振 NMR spectrum/核磁共振波谱 NMR spectroscopy/核磁共振波谱法 continuous wave NMR,CW NMR/连续波核磁共振 fourier transformation NMR spectrum/ FT-NMR/傅立叶变换核磁共振谱 proton magnetic resonance spectrum,PMR/质子核磁共振谱 1H NMR and 13C NMR spectrum/氢谱和碳-13核磁共振谱 spin angular momentum/自旋角动量 magnetogyric ratio/磁旋比 magnetic quantum number,m/磁量子数precession/进动 relaxation mechanism/弛豫历程 local diamagnetic shielding/局部抗磁屏蔽 shielding constant/屏蔽常数 swept field/扫场 seept frequency/扫频schematic NMRspectrometer/核磁仪的概图 magnetic anisotropy/磁各向异性 long range shielding effect/远程屏蔽效应 magnetic eqivalence/磁等价 spin system/自旋系统chemical shift/化学位移 standard for chemical shift/核磁的内标物 shielding and deshielding/屏蔽和去屏蔽效应 spin-spin coupling/自旋-自旋耦合 J-coupling/ J-耦合spin-spin coupling/自旋-自旋偶合 spin=spin splitting/自旋-自旋分裂 coupling constant/耦合常数 decoupling/去耦 nodal plane/结面 factors to affect 1Hchemical shift/影响氢化学位移的因素 signalsplitting for 1H/氢谱的裂分 chemical shift - 13C-NMR/碳谱的化学位移 13C-NMR integration/碳谱中积分 interpreting NMR spectra/核磁谱的解析 2D NMR/二维核磁共振 singlet,s/单峰 doublet,d/双峰 triplet,t/三重峰quartet/ quintet/ sextet/四重峰/五重峰/六重峰 geminal coupling /vicinal coupling/偕偶/邻偶 long range coupling/远程偶合 first order spectrum/一级光谱 second order spectrum/二级光谱(二级图谱) C-H correlated spectroscopy,C-H COSY/C-H光谱Chapter 8 Introduction to Electrochemistry/电化学导论electrochemical analysis/电化学分析 electrolytic analysis method/电解法electtogravimetry/电重量法 coulometry/库仑分析法(电量分析) coulometric titration/库仑滴定法 conductometry/电导法 conductometric analysis/电导分析法conductometric titration/电导滴定法 potentiometry/电位分析法 dirext potentiometry直接电位法 potentiometric titration/电位滴定法 voltammetry/伏安法polarography/极谱法 stripping method/溶出法 amperometric titration/电流滴定法chemical double layer/化学双电层 phase boundary potential/相界电位 electrode potential/金属电极电位 chemical cell/化学电池 liquid junction boundary/液接界面galvanic cell/原电池 electrolytic cell/电解池 cathrode/负极 anode/正极eletromotive force/电池电动势 potentials/电极电势 Plank constant/普朗克常数Nernst equation/能斯特方程 indicator electrode/指示电极 reference electroade/参比电极Chapter 9 Potentiometry/电位法principles of potentiometric measurements/电位法测定原理 direct potentiometry/直接电位法 potentiometric titrations/电位滴定法 standard hydrogen electrode/标准氢电极 primary reference electrode/一级参比电极 standard calomel electrode/饱和甘汞电极 silver silver-chloride electrode/银-氯化银电极 liquid junction boundary/液接界面 asymmetry potential/不对称电位 apparent PH /表观PH值combination PH electrode/复合PH电极 ion selective electrode/离子选择电极 sensor/敏感器 crystalline electrodes/晶体电极 homogeneous membrance electrodes/均相膜电极 heterog eneous membrance electrodes/非均相膜电极 non- crystalline electrodes/非晶体电极 rigid matrix electrode/刚性基质电极 electrode with a mobile carrier/流流体载动电极 gas sensing electrodes/气敏电极 enzyme electrodes/酶电极 glass electrodes/玻璃电极 liquid membrane electrodes/液膜电极 solid-state electrodes/固体电极 selectivity coefficient/选择性系数 electrode-ealibration method/电极校正方法 standard-addition method/标准加入法Chapter 10 Electrolytical Analysis and Coulometry/电解分析法和库仑法bulk electrolysis: electrogravimetry and coulometry/整体电解:电重量法和库仑法controlled-Current electrolytical analysis/控制电流电解法 controlled -Potentil electrolytical analysis/控制电势电解法 choice of negative potential/负极电位的选择 controlled-Potential coulometry/控制电势库仑法 coulometric titration/库仑滴定法 coulometric methods/库仑分析法Chapter 11 Voltammetry and Polarograph/伏安法和极谱法polarography/极谱法 polarogram/极谱图 polarography Equation/极谱波方程linear-sweep Voltammetry /线性扫描伏安法 cyclic voltammetry/循环伏安法 pulse polarographic and voltammetri cmethods/脉冲极谱和伏安法 polarography catalytical waves/极谱催化波 parallel polarographic catalytic wave/极谱平行催化波 hydrogen catalytic wave/氢催化波 adsorptive complex wave/络合物吸附波 stripping voltammetriy/溶出伏安法 anodic stripping voltammetry/阳极溶出伏安法 cathodic stripping voltammetry/阴极溶出伏安法Chapter 12 Chromatography: Theory and Concepts/色谱分析法理论与概念concepts and terms/概念及术语 chromatography/色谱法(层析法) chromatography processor/色谱过程 stationary phase/固定相 mobile phase/流动相 peak height/峰高peak width,W/峰宽 peak width at half height,W1/2 or Y1/2/半峰宽leading peak/前延峰 tailing peak/拖尾峰 symmetry factor,fs/对称因子 retention time/保留时间 retention volume/保留体积 dead time/死时间 asjusted retention time/调整保留时间 isotherm line/等温线 height equivalent to atheoretical plate/理论塔板高度分离度resolution normalization method/归一化法 external standardization外标法 distribution cofficient/分配系数 partition coefficient/狭义分配系数 plate theory/塔板理论 number of theoretical plates/理论塔板数 rate theory/theory of rate/速率理论 resolution ,R/分离度 separation number,SN/分离数 relative Rf, Rr/相对比移值 gas chromatography,GC/气相色谱法 liquid cromatography,LC/液相色谱法planar, plane chromatography//平板色谱法 paper chromatography/纸色谱法 thin layer chromatography ,TLC/薄层色谱法thin film chromatography/薄膜色谱法 capillary electrophoresis,CE/毛细管电泳法high-performance/高效 high performance capillary electroporesis,HPEC/高效毛细管电泳法 high performance liquid chromatography,HPLC/高效液相色谱法 normal-phase/正相 recersed-phase/反相 ion-exchange/离子交换 gel-filtration/凝胶过滤chromatography applications database/色谱应用数据库Chapter 13 Gas chromatography/气相色谱法chemically bonded phase/化学键合相 polydiethylene glycol succinate,PDEGS,DEGS/丁二酸二乙二醇聚酯 GDX/高分子多孔微球 STY/苯乙烯; EST/乙基乙烯苯; DVB/二乙烯苯wall coated open tubular column,WCOT/涂壁毛细管柱 supprot coated open tubular column,SCOT/载体涂层毛细管柱 thermal conductivity detector,TCD/热导检测器hydrogen flame ionization detector,FID/氢焰离子化检测器 electron capture detector ,ECD/电子捕获检测器 noise,N/噪声 drift,d/漂移 column chromatography/柱色谱法 column selector/柱子的选择 packed column/填充柱 capillary column/毛细管柱microbore packed column 微填充柱 instruments in gas chromatography/气相色谱仪GC/MS: instruments and applications/气相色谱-质谱联用技术Chapter 14 High performance liquid chromatography/高效液相色谱liquid –solid chromatography adsorption ,LSC/液-固吸附色谱(液固色谱法)liquid-liquid partition chromatography液-液分配色谱法(分配色谱) normal phase,NP/正相 reversed phase, RP/反相 octadecylselyl,ODS/十八烷基 isocraic elution/恒组成溶剂洗脱 gradient elution/梯度洗脱 ion exchange chromatography,IEC/离子交换色谱法 chemically bonde phase/化学键合相 bonded phase chromatography,BPC/键合相色谱法 chemically bonded-phase chromatography/化学键合相色谱法 ion chromatography,IC/离子色谱法 paired ion chromatography,PIC/离子对色谱法 ion suppression chromatography,ISC/离子抑制色谱法 steric exclusion chromatography,SEC/空间排阻色谱法 size-exclusion chromatography/尺寸排阻色谱gel chromatography/凝胶色谱法 gel permeation chromatography,GPC/凝胶渗透色谱法gel filtration chromatography,GFC/凝胶过滤色谱法 permeation coefficien;Kp/渗透系数 chiral chromatography,CC/手性色谱法 chiral stationary phase,CSP/手性固定相cyclodextrin chromatography,CDC/环糊精色谱法 micellar chromatography,MC/胶束色谱法 affinity chromatography,AC/亲和色谱法 supercritical fluid chromatography,SFC/超临界流体色谱法 end capping/封尾、封顶、遮盖 capillary electrophoresis/毛细管电泳 instruments in capillary electrophoresis/毛细管电泳仪 electroosmotic flow/电渗流 criticak micolle concentration ,CMC/临界胶束浓度 DNA sequencing and capillary array electrophoresis/DNA序列分析及毛细管阵列电泳ultraviolet detector,UVD/紫外检测器 fluorophotomeric detector,FD/荧光检测器 ECD/电化学检测器 RID/示差折光检测器 photodiode array detector ,DAD/光电二极管检测器3D-spectrochromatogram/三维光谱-色谱图 evaporative light scatteringdetector,ELSD/蒸发光散射检测器 ampere detector,AD、安培检测器 high performance capillary electrophoresis,HPCE、高效毛细管电泳法 mobility/淌度 electrophoresis/电泳 electroosmosis/电渗 hydrodynamic injection/动力进样 electrokinetic injection/电动进样 capillary zone electrophoresis,CZE/毛细管区带电泳法 micellar electrokinetic capillary chromatography,MECC/胶束电动毛细管色谱 capillary gel electrophoresis,CGE/毛细管凝胶电泳 sieving筛分 thin layer plate/薄层板;TLC/薄层色谱法 adsorption/吸附 activation/活化 deactivation/脱活性 degree of cross linking/交联度 exchange capacity/交换容量 developing solvent ,developer/展开剂Chapter 15 Mass Spectrometry /质谱分析法mass spectrum,MS/质谱 bar graph/棒图 selected ion monitoring ,SIM/选择离子检测direct probe inlet ,DPI/直接进样 interface/接口 gas chromatography-mass spectrometry,GC-MS/气相色谱-质谱联用 high performance liquidchromatography-mass spectrometry,HPLC-MS /高效液相色谱-质谱联用ionizationmethods/离子化方法 electron impact source,EI/电子轰击离子源 fast atom bombardment ,FAB/快速原子轰击离子源 chemical ionization source,CI/化学离子源field ionization,FI/场电离 field desorptiion,FD/场解析 matrix assisted laser desorption (MALDI)/基质辅助的激光解吸 electro spray ionization ( ESI )/电喷雾 mass analyzer/质量分析器 magnetic-sector mass spectrometer/磁质谱仪 quadrupole mass spectrometer/四极杆质谱仪(四极质谱仪)amu/原子质量单位 ion abundance/离子丰度 relative avundance/相对丰度(相对强度) base peak/基峰 mass range/质量范围 resolution/分辨率 sensitivity/灵敏度 S/N /信噪比 molecular ion/分子离子 fragment ion/碎片离子 isotopic ion/同位素离子metastable ion/亚稳离子 metastable peak/亚稳峰 parent ion/母离子 daughter ion/子离子 odd electron/含奇数个电子的离子 even eletron,EE/含偶数个电子的离子homolytic cleavage/均裂 heterolytic cleavage/异裂(非均裂) hemi-homolysis cleavage/半均裂 rearragement/重排 MW/分子量α-cleavage/α-裂解 relative Abundance of Isotopes/同位素的相对丰度 isotopic Ratio from the Spectra/质谱中的同位素比例 magnetic sector analyzer/磁分析器 time of flight analyzer/飞行时间分析器 quadrupole analyzers/四极质量分析器 fourier transform ioncyclotron/傅立叶离子回旋共振分析器 MS interpretation and fragmentation/质谱解析和化合物裂解presentation of data/数据表达 determination of Molecular Mass/分子量的测量 high resolution mass spectrometry/高分辨质谱 important fragmentation patterns in EI/ 电子轰击电离下的重要裂解方式patterns of different organic compounds’ fragmentation/不同类型有机物的裂解模式 hyphenated MS techniques/质谱联用技术。
化工设备常用词汇和缩写中英文对照

化工设备常用词汇和缩写中英文对照缩写/ 英文/中文AB Anchor Bolt 地脚螺栓Abs Absolute 绝对的Abs Abstract 文摘、摘要A/C Account 帐、帐目AC Alternating Current 交流电Add Addendum 补充、补遗、附录ADL Acceptable Defect Level 允许的缺陷标准Adpt Adapter 连接器、接头AE Absolute Error 绝对误差AET Acoustic Emission Examination 声发射检验AISC American Institute of Steel Construction 美国钢结构学会AISI American Iron and Steel Institute 美国钢铁学会AL Aluminium 铝Alk Alkaline 碱的、强碱的ALM Alarm 报警Alt Alternate 交流、改变Amb Ambient 周围的Amt Amount 数量、金额Anh Anhydrous 无水的ANSI American National Standard Institute 美国国家标准学会API American Petroleum Institute 美国石油学会App Apparatus 设备App Appendix 附录、补遗Appl Applied 应用的Appl Applicable 适当的、合适的Approx Approximate 大约、近似Appx Appendix 附录、附件Arrgt Arrangement 布置AS Alloy steel 合金钢Asb Asbestos 石棉ASL Above Sea Level 海拔高度ASM American Society for Metals 美国金属学会ASME American Society of Mechanical Engineers 美国机械工程师学会Assem Assembly 装配ASTM American Society for Testing and Materials 美国材料试验学会Atm Atmosphere 大气atm Atmosphere pressure 大气压Auto Automatic 自动Aux Auxiliary 辅助设备、辅助的Avail Available 有效的、可用的Avg Average 平均AW Arc welding 电弧焊AW Automatic Welding 自动焊A.W.G. American Wire Gauge 美国线规AWS(AWI) American Welding Society(Institute) 美国焊接学会BAB Babbitt Metal 巴氏合金Baf Baffle 折流板、缓冲板BB Ball Bearing 滚珠轴承BC Between Centers 中心距、轴间距BC Bolt circle 螺栓中心圆BD Blow down 放空、放料BEDD Basic engineering design data 基础工程设计数据Bet Between 在…之间Bev Bevel 斜角、坡口BF Back face 背面、反面BF Blind flange 法兰盖(盲法兰)BHN Brinell hardness number 布氏硬度值BL Battery Limit 界区BL Battery Line 界区线B/L Bill of Loading 载荷数据表Bld Blind 盲板Blk Black 黑色Blk Blank 空白BM Bench Mark 基准标志BM Bending Moment 弯矩B/M (BOM) Bill of Material 材料表Bot Bottom 底BP Back Pressure 背压BP Base plate 底板BR Basic Requirements 基本要求BRG Bearing 轴承BRKT Bracket 支架Brs Brass 黄铜BS Both Side 两边BS British Standard 英国标准BS Balance Sheet 平衡表Bskt Basket 筐BTU British Thermal Unit 英国热量单位BV Back View 后视图BV Butterfly Valve 碟阀BW Brine Vater 冷冻盐水BW Butt Welding 对焊BWG Birmingham Wire Gauge 伯明翰线规BWRA. British Welding Research Association 英国焊接研究协会C Centigrade(degree) 摄氏度数CA Chemical Analysis 化学分析CA Corrosion Allowance 腐蚀裕量Calc Calculate 计算Cap Capacity 能力、容量CAS Cast Alloy Steel 铸造合金钢Cat Catalyst 触媒、催化剂Catg Catalog 目录、样本C-C(C/C) Center to center 中心距cc carbon copy 复写(纸复制)本cc cubic centimeter 立方厘米CCW Counter clockwise 反时针方向CD Cold Drawn 冷拉的、冷拔的CE Covered Electrode 焊条Cent Centrifugal 离心的CF Centrifugal Force 离心力CFW Continuous Fillet Weld 连续角焊缝CG Center of Gravity 重心CH Case-Hardening 表面硬化Ch Chapter 章节Cham Chamfer 倒角、斜角、斜面Chan Channel 通道、沟槽、管箱、槽钢Chk Check 检查CI Cast Iron 铸铁CIF Cost,Insurance and Freight 到岸价格Circ Circumference 圆周、环向CL Class 等级、类别CL Center Line 中心线CL Clearance 间隙CLAS Cast Low Alloy Steel 低合金铸钢CM Center of Mass 质量中心Cnds Condensate 冷凝液CO Clean Out 清除Co Company 公司Coef Coefficient 系数Col Column 柱、塔Comb Combination 组合Comp Compare 比较Comp Compound 化合物、复合的Compn Composition 组分Conc Concrete 混凝土Conc Concentration 浓度Cond Conductor 导体Cond Condition 条件Conn Connection 联接、接口Const Constant 常数、恒定的Const Construction 结构Cont Control 控制Cont Contain 包含Cont Content 内容、含量Corp Corporation 公司Corr Corrosion 腐蚀CP Centipoise 厘泊CP Center of Pressure 压力中心Cpl Coupling 管箍Cplg Coupling 联轴节CR Chloroprene Rubber 氯丁橡胶CS Carbon Steel 碳钢CS Center Section 中心截面CSTG Casting 铸造、铸件Ctr Center 中心CW Cooling Water 冷却水CW Continuous Welding 连续焊Cy Cycle 循环Cyl Cylinder 气缸、圆筒D Density 密度Dbl Double 二倍、双DEDD Detail Engineering Design Data 详细工程设计数据Def Definition 定义Deg Degree 度、等级Dept Department 部门Des Design 设计Det Detail 详细Detn Determination 确定、决定Dev Deviation 偏差Dev Device 装置DF Design Formula 设计公式Df Deflection 偏斜Dia Diameter 直径Diag Diagram 图Dim Dimension 尺寸Dir Direction 方向Disch Discharge 排出、出口Distr Distribution 分布Div Division 部分、区分DL Dead load 静载荷、自重Doc Document 文件、资料DP Design Pressure 设计压力DP Differential Pressure 压差、分压Dr Drill 钻孔Dr Drive 驱动DW Dead weight 静重、自重DW Demineralized Water 脱盐水Dwg Drawing 图E East 东EC Elasticity Coefficient 弹性系数Ecc Eccentric 偏心EF Electric Furnace 电炉Eff Efficiency 效率eg exempli gratia 例如EHP Effective Horsepower 有效功率EJ Expansion joint 膨胀节EL Elevation 标高Elb Elbow 弯头Elec Electric 电的Elem Element 元素、元件Ellip Ellipsoidal 椭球的、椭圆的Emer、Emerg Emergency 事故、紧急Encl Enclosure 密封、封闭Engrg、Eng Engineering 工程、设计EP Explosion Proof 防爆Eq Equipment 设备Eq Equation 公式、方程式Eq Equivalent 当量ES Electrostatic 静电EST Estimate 估计ESW Electro-Slag Welding 电渣焊ET Eddy Current Examination 涡流检验etc et cetera (and so on) 等等Evap Evaporate 蒸发Ex Example 例如Ex Excess 过剩、超过Exam Examination 检验Exh Exhaust 废气、排气Exp Expansion 膨胀Exptl Experimental 实验的Ext External 外部Ext Extreme 极端的FAO Finish All Over 全部加工FAX Facsimile 传真FB Flat Bar 扁钢FCAW Flux Cored Arc Welding 熔剂芯弧焊(手工焊)Fdn Foundation 基础FDW Feed Water 给水FF Flat Face 平面F/F Field Fabricated 现场制造Fig Figure 图Fin Finish 加工、完成FL Full Load 满载Flex Flexible 挠性Flg Flange 法兰FOB Free On Board 离岸价格FOC Free Of Charge 免费Forg Forging 锻件FOS Factor Of Safety 安全系数FREQ Frequency 频率FST Forged Steel 锻钢Ft Feet 英尺Ftg Fitting 管件、装配F.V. Full Vacuum 全真空FW Fresh Water 新鲜水FW Field Weld 现场焊接FW Fillet Weld 角焊缝GA General Average 平均值Gal Gallon 加仑Gen General 一般、总的Genr Generator 发电机、发生器GF Groove Face 槽面Gl Glass 玻璃GL Ground Level 地面标高GMAW Gas Metal Arc Welding 气体保护金属极电弧焊Gnd Ground 接地、地面Govt Government 政府GP General Purpose 一般用途、通用Gr Grade 等级Gr Gravity 重力Grd Ground 地面Grp Group 分组、类Gr- wt Gross weight 总重、毛重HB Brinell Hardness 布氏硬度HC Hydrocarbon 烃类HC High Capacity 大容量HD Head 压头Hex Hexagon 六角HH Hand Hole 手孔Hor Horizontal 水平、卧式hp Horsepower 马力HP High Pressure 高压HR Rockwell Hardness 洛氏硬度HR(hr) Hour 小时HRC Rockwell C Hardness C级洛氏硬度HS High Pressure Steam 高压蒸汽HS Shore Scleroscope Hardness 肖氏硬度HSC High Pressure Condensate 高压蒸汽凝液HT High Temperature 高温HT Heat Treatment 热处理HT Hydrostatic Test 水压试验HV Vickers Hardness 维氏硬度Hvy Heavy 重的、重型的HW Hot Water 热水ICW Inter Cooling Water 中间冷却水ID Inside Diameter 内径IF Interface 交接面Illus Illustration 说明、图解IN Inlet 进口in Inch 英寸incl Including 包括Ind Indicate 指示Ins Insulation 保温INSP Inspection 检验Instl Installation 安装Int Internal 内部的Int Intermediate 中间的Intmt Intermittent 间歇的、间断的I/O Input/Output 输入/输出Jt Joint 连接、接头KG Kilogram 公斤KW(kw) Kilowatt 千瓦LAS Low Alloy Steel 低合金钢lb pound 磅LC Level Control 液位控制器Leng Length 长度LF Female Face 凹面Lg Long 长的LG Level Glass 液位计LH Left Hand 左手Lin Linear 线性的Liq Liquid 液体Lj Lap joint 搭接LJ Lapped Joint 松套LM Male Face 凸面LMTD Logarithmic Mean Temperature Difference 对数平均温差LN Liquid Nitrogen 液氮LN Level Normal 正常液位Lng Lining 衬里LNG Liquefied Natural Gas 液化天然气Lo Lubrication oil 润滑油Lo Low 低LOA Length Over-All 全长\总长LOC Location 位置Log Logarithm(to the base 10) 对数(以10为底)Long Longitudinal 纵向LP Low Pressure 低压LPG Liquefied Petroleum Gas 液化石油气LT Low Temperature 低温LT Leak Testing 气密试验Ltd Limited 有限Ltr Letter 字母、信Lub Lubricate 润滑LW Lap Welding 搭接焊LWN Long Welding Neck 对焊长颈LWS Longitudinal Welded Seam 纵向焊缝M(m) Meter 米、公尺Mach Machine 机器Maint Maintenance 维修Mat(Mat’l) Material 材料MAWP Maximum Allowable Working Pressure 最大允许工作压力Max Maximum 最大MDMT Min. Design Metallic Temperature 最低设计金属温度Mech Mechanical 机械的Mfd Manufactured 制造的Mfr Manufacturer 制造商MG(mg) Milligram 毫克MH Manhole 人孔MI Melt Index 熔融指数MIG Metal Inert Gas Arc Welding 熔化极惰性气体保护焊Min Minimum 最小MIN(min) Minute 分钟MJG Metallic Jacketed Gasket 金属包复垫片Mk Mark 标志ml Milliliter 毫升mm Millimeter 毫米MP Medium Pressure 中压MPC Maximum Permissible Concentration 最大许用浓度MS Medium Pressure Steam 中压蒸汽MS Medium Steel 中碳钢MSL Mean Sea Level 平均海平面MT Magnetic Particle Examination 磁粉检测MTD Mean Temperature Difference 平均温差Mtd Mounted 安装、装配MTR Material Testing Report 材料试验报告MU Measurement Unit 测量单位MV Mean Value 平均值MW Mineral Wool 矿渣棉N North 北NA Not Applicable 不适用的NAT Natural 天然的Natl National 国家的NC America National Coarse Thread 美制粗牙螺纹NDT Nondestructive Testing 无损检验Neg Negative 负NF American National Fine Thread 美国细牙螺纹Nip Nipple 螺纹管接头、短节Nom Nominal 名义Nor Normal 正常NOZ Nozzle 接管NPS American Standard Straight Pipe Thread 美国标准直管螺纹NPSHA Net Positive Suction Head Available 有效汽蚀裕量NPSHR Net Positive Suction Head Required 要求汽蚀裕量NPT American Standard Taper Pipe Thread 美国标准锥管螺纹NT Net Tonnage 净吨数NTP Normal Temperature and Pressure 标准温度和压力NTS Not To Scale 不按比例Num Number 数、编号、号码Obj Object 目标、对象OC Operating Characteristic 操作特性OD Outside Diameter 外径OH Open Hearth 平炉Oper Operating 操作Opp Opposite 对面、相反OR Outside Radius 外半径OR Outside Ring 外环Orien Orientation 方位Ovhd Overhead 高架的、顶部的Oxyg Oxygen 氧P Page 页P Pressure 压力Par Parallel 平行Para Paragraph 节、段Pc Piece 件PE Polyethylene 聚乙烯PFD Process Flow Diagram 工艺流程图Perform Performance 性能PF Power Factor 功率因素PID Piping & Instruments Diagram 管道和仪表流程图Pl Plate 板Pneum Pneumatic 气、气动PO Purchase Order 订货单Port Portable 便携式、轻便Posit Positive 正Posit Position 位置ppb Parts per billion 十亿分之几ppm Parts per million 百万分之几Prod Product 产品Proj Project 项目、工程PS Polystyrene 聚苯乙烯psf Pounds per square feet 磅/平方英尺psi Pounds per square inch 磅/平方英寸PT Liquid Penetrants Examination 液体渗透检测PTFE Polytetrafluoroethylene 聚四氟乙烯PV A Polyvinyl Acetate 聚醋酸乙烯PV AL Polyvinyl Alcohol 聚乙烯醇PVC Polyvinyl Chloride 聚氯乙烯PWHT Post Weld Heat Treatment 焊后热处理QA Quality Assurance 质量保证QC Quality Control 质量控制Qty Quantity 数量Qual Quality 质量R Radius 半径Rad Radial 径向RC Rockwell Hardness 洛氏硬度Recip Reciprocate 往复式Recirc Recirculate 再循环Recom Recommended 建议、推荐Ref Reference 参照、基准Refract Refractory 耐火材料Reg Regulator 调节器Regen Regenerator 再生器、再生塔Reinf Reinforce 加强Rel Relative 相对Rep Report 报告Rep Repeat 重复Reqd Required 要求、需要的REV Revision 修改、版次Rev Review 评论、检查Rev Revolution 旋转、转数RF Raise face 突台面RH Relative Humidity 相对湿度RH Right Hand 右手RMS Root Mean Square 均方根ROT Rotating 旋转rpm revolutions per minute 转/分rps revolutions per second 转/秒RT Radiographic Examination 射线照相检验S South 北SAW Submerged Arc Welding 埋弧焊Sc Scale 刻度、比例SC Standard Condition 标准状态(温度压力)SCH Schedule 表号、管厚号、进度Sec Second 秒Sec Section 剖面、节、段Seg Segment 节、段Sep Separator 分离器Seq Sequence 次序、顺序SG Specific Gravity 比重SHP Shaft Horsepower 轴马力SI Standard International 国际单位制Sig Signal 信号Sld Solid 固体SMAW Shield Metal Arc Welding 手工焊Smls Seamless 无缝的SO Slip on 平焊(法兰)Sol Solution 溶液SP Spare parts 备件Sp Special 特殊的、专门的SP Static pressure 静压力Spec Specification 说明、规定SpGr Specific Gravity 比重Sq Square 方形、平方SR Stress Relief 消除应力SS Stainless Steel 不锈钢Sta Station 站STD Standard 标准STDWT Standard Weight 标准重量STL Steel 钢STP Standard Temperature and Pressure 标准温度和压力Suc Suction 吸入Suppl Supplement 补充SW Shop Welding 车间焊接SW Spot Weld 点焊SW Socket Welding 承插焊(法兰)SWP Safety Working Pressure 安全工作压力SYM Symbol 符号、标志SYM Symmetry 对称SYS System 系统T Ton 吨TC Tungsten Carbide 碳化钨Tech Technique 技术TEMA Tubular Exchanger Manufacturers Association 管壳式换热器制造商协会(美国)Temp Temperature 温度Term Terminal 终端、接头Thk Thickness 厚度TIG Tungsten Inert Gas Arc Welding 钨极惰性气体保护焊TL Tangent line 切线Tol Tolerance 公差Tot Total 总Trans Transfer 输送器TW Total Weight 总重TW Tack Welding 定位焊Typ Typical 典型、标准UNC Unified National Coarse Thread 统一标准粗牙螺纹UNF Unified National Fine Thread 统一标准细牙螺纹US Undersize 尺寸过小UT Ultrasonic Examination 超声波探伤UTS Ultimate Tensile Strength 抗拉强度极限Vac Vacuum 真空Vap Vapor 蒸汽Var Variable 变化、变量Vel Velocity 速度Vert Vertical 垂直V ol Volume 体积VT Visual Testing 宏观(目测)检查W Watt 瓦WL Welding Line 焊缝线WL Water Line 水线WPS Welding Procedure Specification 焊接工艺规程WP Working Pressure 工作压力WRC Welding Research Committee 焊接研究委员会(美国)WS Water Supply 供水WT Weight 重量W/V Wind Velocity 风速XR X-Ray X射线Yd Yard 码YP Yield Point 屈服点Yr Year 年。
改进的强跟踪SVD-UKF算法在组合导航中的应用

改进的强跟踪SVD-UKF算法在组合导航中的应用孙磊;黄国勇;李越【摘要】针对无迹卡尔曼滤波(Unscented Kalman Filter,UKF)在系统强非线性或状态模型不精确的情况下,存在滤波精度降低甚至发散的问题,提出一种改进的强跟踪SVD-UKF算法.该算法采用奇异值分解(Singular Value Decom-position,SVD)的方法改进UKF中状态协方差矩阵的迭代,保证协方差矩阵的非负定性及迭代的稳定性;算法基于强跟踪滤波(Strong Tracking filter,STF)理论框架,对改进的SVD-UKF引入多重渐消因子自适应调整状态协方差矩阵,在系统状态发生突变的情况下,实现系统真实状态的强跟踪.将该算法在BDS/INS组合导航中仿真验证,结果表明了该算法的有效性.%The performance of the Unscented Kalman filter would be degraded in accuracy or divergences when the sys-tem states are uncertain and strong nonlinear, an improved strong tracking SVD-UKF algorithm is proposed. The iteration of covariance matrix in UKF is improved by Singular Value Decomposition(SVD)of covariance matrix, ensured the sta-bility of the iteration of covariance matrix and restrained the negative definiteness of system state covariance matrix. Mul-tiple fading factors matrices are introduced in improved SVD-UKF, in order to automatic improve system state covariance matrix based on Strong Tracking Filter(STF)theory framework, and realize the strong tracking of the real state while sys-tem status are mutating. The proposed strong tracking SVD-UKF is applied to the BDS/INS integrated system for simula-tion, simulation results show the effectiveness of the presented algorithm.【期刊名称】《计算机工程与应用》【年(卷),期】2017(000)010【总页数】6页(P225-229,240)【关键词】无迹卡尔曼滤波(UKF);奇异值分解(SVD);强跟踪;渐消因子;组合导航【作者】孙磊;黄国勇;李越【作者单位】昆明理工大学信息工程与自动化学院,昆明 650500;云南省矿物管道输送工程技术研究中心,昆明 650500;昆明理工大学信息工程与自动化学院,昆明650500;云南省矿物管道输送工程技术研究中心,昆明 650500;昆明理工大学信息工程与自动化学院,昆明 650500;云南省矿物管道输送工程技术研究中心,昆明650500【正文语种】中文【中图分类】V249.32+8非线性系统状态估计在组合导航中应用十分广泛,非线性滤波方法成为组合导航的热门研究之一。
UKF在深组合GPS_INS导航系统中的应用
∑ I = ANR (δτ − δ ) sin c ( πδfT ) cos(δφ + δf ∑ Q = ANR(δτ − δ ) sin c(πδ fT ) sin(δφ + δf
T ) 2 T ) 2
(1) (2) 图 2 理想码相关函数 Fig.2 Idealized code correlation function
式中, σ N 是相关信号 I、Q 处理后的噪声强度。
(7)
2
基于UKF的预滤波器
UKF是另外一大类用采样策略逼近非线性分布的方法。UKF以UT变换为基础,采用卡尔曼线性滤波框架采用确定性
采样策略逼近非线性分布的方法。UKF采样的粒子点(一般称为Sigma点)的个数很少,具体个数根据所选择的采样策略 而定最常用的是2n+1个Sigma点对称采样,n为状态变量维数。UKF的计算量基本与EKF算法相当,但性能优于EKF[8]。 针对预滤波器的线性系统模型和非线性测量模型的加性噪声特点,下面给出适用于加性噪声的UKF滤波方法。将式 (4) (5)离散化得到非线性系统模型:
UKF的原理

UKF
• 1、思想 • 不同于EKF对系统进行线性近似,UKF是对系统 的概率分布进行近似。 • 2、核心(UT变换)
UKF
• k是个标量,控制每个点到状态均值的距离,w为权值,且
• 这样用了更多采样点的信息,揭露出非线性系统的本质。
UKF
UKF
• 3、UKF算法
系统:
状态扩充: 初始化:
x a [ xT
X k 1 ( x k 1 , k 1)Wk 1
z k - h( x k 1 , k 1)
• • • • •
h
xk
|
x k ,k 1
xk v
对此线性系统进行常规kalman滤波。 直接线性化的缺点: 1、忽略系统高阶成分造成误差。 2、计算雅可比矩阵困难。 3、要想精确,取 x 就要小,总计算量就很大。
5 2 Rk 0
0 0.012
观测次数N=50
采样时间为t=0.5
实例分析
t=0.5
实例分析
t=0.5时,滤波值到实际值的距离差的对比,显然UKF精度优于EKF。
谢谢观赏
Make Presentation much
more fun
UKF 在INS/GPS组合导航中 的应用
目录
INS/GPS组合导航简介 KF、EKF的不足
UKF出场 实例分析
INS/GPS组合导航简介
优点:完全自主、运动参数完备、抗干扰性强
缺点:误差积累、成本较高
惯性导航系统
优点:全天候、高精度、误差不积累
缺点:缺少姿态信息、易被干扰
卫星导航系统
用GPS的高精度定位信息通过组合滤波器来标定和补偿惯 导系统的积累误差,提高导航精度。同时,利用惯导系统的速 度和加速度信息对GPS进行速度辅助,以提高GPS的抗干扰能 力以及动态性能。
UKF在线调整算法及其仿真研究

宋 超 (中国人 民解放军海军驻天津 707所军事代表室 ,300000)
摘 要 :针对无迹 卡尔曼特殊模 型的优化 问题 ,以自由调节参 数和非线性滤波 模型 的特 点为核 心,对无迹卡 尔曼滤波进行 了理 论分 析和仿 真验证 。针对状态方程或量测方程有一个是线性 时,给 出了模型化的 Ul(F算法 ,并 定量分析 了模型化 的 UKF算法的 计 算量 问题 。结果发现模型化 UKF计算量更小 ,运行时间得到改善 。 关键词 :无迹卡 尔曼 ;模型化 ;自由调节参数 ;在 线调整
Abstract:Aiming at the optimization problem of the non trace Calman’S special model, the theory analysis and Simulation verification of the non trace Calman filter are carried out based on the characteristiCS of the free adjustment parameter and the nonlinear filtering mode1.This article for state equation or a measurement equation iS linear time, given the UKF algorithm modeling and quantitative analysis of the computational problem modeled UKF algorithm.It was found that the computational modeling UKF smaller,run— t ime can be improved. Keywords :Unscented Kalman Fi lter: model ing;free to adjust parameters:onl ine adjustment
UKF与EKF在GPS_INS超紧组合导航中的应用比较
2 超紧组合导航系统非线性模型
状态方程 惯 性 导 航 系 统 本质上 是非线 性 的, 常用的线性 误差模型都是建立在假设姿态误差角是小量的情况 下得到的 , 由于忽略了高阶项 , 所以当存在较大的导 航误 差时 , 线性化 误 差 方 程 就 不 能 精 确 描 述 系 统 的 非线性特性 。 我们也知道 , 对于一个非线性系统 , 滤 波的 计算量会因 为 矩 阵 运 算 而 很 大 , 当状态向量的 维数增加 , 计算量会增加 , 因此在不损失总体性能的 情况下 , 忽略系统的一些非线性项是合理的 。 比起速 姿态误差对惯性系统的性能影响要严 度 和 位 置,
7 ] 卡尔曼滤波以及联邦卡尔曼滤波 [ 。 这些方法有模
燉 G P S I NS组合导航系统因为克服了各自缺点 , 取长补短 , 被一致 认 为 是 飞 行 载 体 较 理 想 的 导 航 系 。G 燉 P S I NS组合导航系统按照信息交换或组 合 程 度 的 不 同, 又 分 为 松 散 组 合、 紧组合和超紧组
段笑菊 , 薛晓中
南京理工大学 , 南京 ( 摘 2 1 0 0 9 4 )
要: 针对 G 基于四元素法建立了系统的非线性状态方程 , 利用 G 燉 P S I NS超紧组合特点 , P S接收机原始伪 距 测 量 信 息
对 系 统 状 态 进 行 观 测, 并将 E 仿 真 结 果 表 明 UKF在 姿 态 、 位置估计上精度要优于 KF和 UKF方 法 运 用 到 系 统 进 行 比 较 , 。 E KF 关键词 : 超紧组合 , 非线性 , , E KF UKF 中图分类号 : 4 9 3 2 V2 文献标识码 : A
总第 3 ( 5 -9 5 3 )
·6 1 ·
ukf滤波算法

ukf滤波算法UKF(Unscented Kalman Filter)滤波算法是一种非线性滤波算法,目的是通过逼近非线性系统的状态和测量值的真实分布来估计系统的状态。
相比于传统的Kalman滤波算法,UKF采用了Sigma点来近似系统状态和测量值的分布,从而可以处理非线性系统。
UKF算法的基本思想是使用一些特定的采样点(称为Sigma点)来近似系统状态和测量值的分布。
通过对这些Sigma点进行传播和更新,可以获得系统的状态估计值。
具体来说,UKF算法包含以下几个步骤:1.初始化:确定系统的状态和观测方程,以及状态协方差矩阵和测量噪声协方差矩阵。
2. Sigma点生成:根据系统状态的均值和协方差矩阵,生成一组代表系统状态的Sigma点。
通常,Sigma点的个数是通过经验确定的,一般取2n+1个,其中n是状态向量的维度。
3. Sigma点传播:根据系统的非线性状态方程,通过将Sigma点传播到下一个时刻,得到预测的Sigma点。
这一步骤的目的是在状态空间中对预测状态进行采样。
4.状态预测:利用预测的Sigma点计算出预测的系统状态的均值和协方差矩阵。
5. Sigma点更新:根据测量模型,通过对预测的Sigma点进行线性变换,得到预测的测量值Sigma点。
这一步骤的目的是在测量空间中对预测状态进行采样。
6.测量预测:利用预测的测量值Sigma点计算出预测的测量值的均值和协方差矩阵。
7.卡尔曼增益计算:根据预测的状态和测量值的均值和协方差矩阵,计算出卡尔曼增益。
8.状态更新:利用测量值对预测的状态进行修正,得到更新后的状态估计值和协方差矩阵。
通过以上步骤,UKF算法可以通过对状态和测量值的Sigma点进行传播和更新,逼近非线性系统的状态和测量值的真实分布,从而得到系统的状态估计值。
UKF算法的优点是可以处理非线性系统,并且不需要对系统进行线性化处理。
相比于传统的扩展卡尔曼滤波(EKF)算法,UKF算法更加精确和鲁棒。
确定编队卫星相对轨道的容错UKF方法

确定编队卫星相对轨道的容错UKF方法王辉;顾学迈【期刊名称】《宇航学报》【年(卷),期】2009(030)004【摘要】针对相对轨道测量设备出现连续野值引起的滤波误差偏大及发散问题,提出了基于残差正交性检测的容错UKF算法.介绍了非线性滤波在相对轨道自差确定中发展历程和容错UKF的原理、滤波算法和计算流程.根据测量设备出现连续成片野值时残差序列服从以野值为均值的正态分布这一特性,提出了基于残差正交性进行野值检测的思路,通过加权一个以残差方差的迹为参数的活化函数,构造在线修正的uKF容错滤波器,抑制野值对新息序列正交性的影响.在STK软件设定两颗卫星的轨道根数,生成相对运动的位置和速度,通过坐标变换,加入正态分布的误差和连续野值,构造卫星问距离、仰角和方位角测量值.根据C-W相对运动方程和空间几何建立状态方程和测量方程,编制基于残差正交性检测的容错IJKF.滤波器的相对轨道确定程序.通过仿真计算,评估了连续野值对常规UKF和容错uKF轨道确定算法的影响,证实了容错UKF算法可以完成对连续野值的检测及在线修正功能,有较强的鲁棒性和稳定性,可以应用于工程实践.【总页数】7页(P1593-1599)【作者】王辉;顾学迈【作者单位】哈尔滨工业大学,哈尔滨150001;哈尔滨工业大学,哈尔滨150001【正文语种】中文【中图分类】V557【相关文献】1.编队飞行卫星相对轨道确定方法研究 [J], 陈宏;王元钦;陈谷仓;王天祥2.基于EKF容错滤波方法的编队卫星相对轨道自主确定 [J], 李文博;赵阳3.基于UKF算法的小卫星串行编队相对状态自主确定 [J], 张晓磊;郑建华;高东4.基于UKF的编队卫星的相对姿态确定算法 [J], 张连礼;罗建军5.编队卫星短弧段相对轨道确定方法研究 [J], 李晓明;曾国强;姚红因版权原因,仅展示原文概要,查看原文内容请购买。
基于平方根UKF的海上多平台误差配准方法

基于平方根UKF的海上多平台误差配准方法
王成飞;胡英娣;张丕旭
【期刊名称】《海军工程大学学报》
【年(卷),期】2016(028)001
【摘要】给出了多传感器数据对准的坐标变换模型,并分别构建了关于导航系统误差和传感器系统误差的测量方程和状态方程,然后设计了一种平方根UKF误差配准算法以对两种系统误差进行在线估计和补偿,完成海上多平台的误差配准.仿真实验验证了该算法的正确性和有效性.
【总页数】6页(P103-107,112)
【作者】王成飞;胡英娣;张丕旭
【作者单位】海军装备研究院,北京 100036;91872部队,北京 102442;海军装备研究院,北京 100036
【正文语种】中文
【中图分类】TN957;TP13
【相关文献】
1.一种基于神经网络和UKF的自适应目标误差配准方法 [J], 刘宇;陈昕;王运锋;刘洪
2.基于SRUKF的3D雷达与2D雷达的误差配准方法 [J], 刘德浩;王国宏;陈垒;关成斌
3.基于平方根UKF滤波的轨道机动飞行器自主导航方法 [J], 范利涛;郑伟;汤国建;吴杰
4.基于两级扩展Kalman滤波的海上多平台误差配准算法 [J], 王成飞;王航宇;石章松
5.基于平方根双阶EKF的2D雷达与3D雷达误差配准方法 [J], 刘卫华;黄高东;董云龙
因版权原因,仅展示原文概要,查看原文内容请购买。
UKF滤波算法在弹箭落点估计中的应用优先出版

弹箭与制导学报Journal of Projectiles, Rockets, Missiles and Guidance收稿日期:UKF滤波算法在弹箭落点估计中的应用曾凡桥1,陈国光1,高小东2,刘霖1(1中北大学机电工程学院,太原 030051;2豫西工业集团军品研发中心,河南南阳 473000)摘要:依据部分弹道的弹道轨迹测量数据,准确地预报弹道落点,是弹道修正弹药智能化的关键技术。
综合考虑滤波精度和算法复杂度,本文采用质点弹道模型和无迹卡尔曼滤波(Unscented Kalman Filter)方法,建立了弹道滤波模型和外推弹道模型。
通过对雷达测量数据的处理结果表明,UKF弹道滤波模型和质点外推模型有较高的精度。
关键词:UKF;弹道落点;雷达;弹道滤波中图分类号:TJ410.1 文献标志码:AApplication of Unscented Kalman Filter In Estimationof Projectile Falling PointZENG Fanqiao1,CHEN Guoguang1,GAO Xiaodong2,LIU Lin1(1 College of Mechatronic Engineering,North University of China,Taiyuan 030051,China;2Yuxi Industries Group Co.Ltd,Henan Nanyang 473000,China)Abstract: According to the measured data of part of ballistic trajectory to accurately predict the trajectory falling point ,it is the key technology of the intelligence of trajectory correction ammunition. Considering the filtering accuracy and complexity of algorithms , the ballistic model of filtering and the ballistic model of extrapolating were established by using particle trajectory equations and Unscented Kalman Filter method in this paper. The processing results of the measured data obtained by radar show that the ballistic model of UKF filtering and the particle ballistic model of extrapolating have higher accuracy.Keywords:Unscented Kalman Filter;trajectory falling point;radar;trajectory filtering0 引言在现代战争中,为减少不必要的附加损伤,要求弹箭具有精确的点目标打击能力,弹道修正弹就是诸多新型弹药中低成本、高精度的炮兵常规弹药之一。
UKF在基于修正罗德里格参数的飞行器姿态确定中的应用

UKF在基于修正罗德里格参数的飞行器姿态确定中的应用
UKF在基于修正罗德里格参数的飞行器姿态确定中的应用
UKF是一种新的非线性滤波方法,在状态的时间更新阶段直接使用非线性模型,不引入线性化误差,而且不必计算Jacobi矩阵,相对于扩展卡尔曼滤波(EKF)不仅能提高滤波精度,而且更容易实现.修正的罗德里格参数(MRPs)是一种飞行器姿态参数,相对于四元数姿态参数,用MRPs 表示飞行器的姿态时,状态误差方差不会产生奇异性,并且能在一定程度上减小估计的计算量.本文针对MRPs表示的无陀螺飞行器姿态系统,利用UKF设计了姿态估计器,并通过仿真验证了算法的有效性.
作者:张红梅邓正隆高玉凯 ZHANG Hong-mei DENG Zheng-long GAO Yu-kai 作者单位:哈尔滨工业大学控制科学与工程系,哈尔滨,150001 刊名:宇航学报 ISTIC PKU 英文刊名: JOURNAL OF ASTRONAUTICS 年,卷(期):2005 26(2) 分类号:V448.2 关键词: UKF 姿态确定修正的罗德里格参数。
静电陀螺静态漂移误差模型系数的UKF标定方法

静电陀螺静态漂移误差模型系数的UKF标定方法
张克志;田蔚风;钱峰;王俊璞;边姜
【期刊名称】《上海交通大学学报》
【年(卷),期】2008(42)8
【摘要】针对静电陀螺漂移误差特性,采用一种新的非线性建模方法
UKF(Unscented Kalman Filter)对ESG漂移系数进行了标定.该方法基于
UT(Unscented Transformation)原理,在保持陀螺漂移模型非线性基础上,使高斯随机变量在非线性方程中传播,实现非线性模型参数的估计.试验结果表明,与最小二乘法和扩展Kalman滤波比较,这种非线性建模方法能够对ESG漂移误差模型进行准确的标定.
【总页数】5页(P1387-1391)
【关键词】静电陀螺漂移;无香型卡尔曼滤波器;标定
【作者】张克志;田蔚风;钱峰;王俊璞;边姜
【作者单位】上海交通大学仪器科学与工程系,上海200240;上海汽车集团股份有限公司技术中心,上海201804
【正文语种】中文
【中图分类】U666.1
【相关文献】
1.改进的MEMS陀螺静态误差模型及标定方法 [J], 李建利;房建成
2.在反转平台离心机上标定陀螺仪的误差模型系数的方法 [J], 王世明;任顺清;王常
虹
3.静电陀螺监控器中陀螺漂移模型系数的标定方法研究 [J], 文飞鸽;杨功流
4.静电陀螺监控器中静电陀螺仪的漂移误差模型 [J], 杨功流;蔡玲;陈超英;高钟毓
5.陀螺仪漂移系数的多位置离心机标定方法及误差分析 [J], 王世明;高晓东;;因版权原因,仅展示原文概要,查看原文内容请购买。
基于UKF的汽轮机调节系统参数辨识方法研究

2n
i= 0 , iX 01
R k + 1, P xz, k + 1 = iE W c [ Vk+ 1 - x ^ k+ 1 ] [ Z k+ 1 - z ^ k+ 1 ] , = 0
i i i T 2n
K k + 1 = Pxz, k + 1 P z, k + 1, x ^ k+ 1 = x ^ k + 1 + K k + 1 ( zk + 1 - z ^k+ 1 ) i= 0 , iX 01 差. UKF 方法流程图如图 1所示. P x, k + 1 = Px, k + 1 - K k + 1P z, k + 1K k + 1, 其中 Q k 是过程 噪声的方 差, R k 是测量 噪声的方
T
Qk. 其中, 过程噪声不参与 V k 的传播, 过程噪声仅通过
i
过协方差矩阵的 Cho lesky 分解或者特征值分解求 得 , 其 中 Cho lesky 分 解要 求协 方差 矩阵 为正 定. ( n + K) P ) i的下标 i代表矩阵的第 i 列, 为 n 维 的列矢量. 确定均值的权重系数为 K n+ K i Wm = 1 2( n + K) 确定协方差的权重系数为
[ 1] 沈善德 . 电力系统辨识 [ M ] . 北京 : 清华大学 出版社 , 1993: 117- 134 . [ 2] EBAN S C, REES D, H ILL, e t a l. F requency- dom ain iden tifi cat ion of gas tu rb ine dynam ics[ J] . I EEE T ran sact ion s on Con trol Sys tem s Technology, 1998, 6( 5) : 651- 662. [ 3] 王志贤 . 最优状态估计与系 统辨识 [ M ] . 西 安 : 西北工 业大 学出版社 , 2004 : 19- 59. [ 4] ER IC A W, RUDO LPH V D M. The U nscen ted K alman F ilter for N on linear Est i m ation[ C ] / / P roceed ings of Sym posium 2000 on A dap tive System s for S ignal Processing, Commun ication and C ontro l ( A S - SPCC ), Lake Lou ise, A lberta, C anada: IEEE, 2000 : 153- 158.
基于SRUKF的机载多平台传感器数据配准算法

基于SRUKF的机载多平台传感器数据配准算法
孟宏峰;刘兆磊;胡学成;俞建国;马岳飞
【期刊名称】《电子测量技术》
【年(卷),期】2016(0)2
【摘要】提出一种基于平方根UKF的机载多平台传感器数据配准方法。
首先给出多平台传感器偏差配准模型,将目标的运动模型和传感器配准误差组合在同一个状态方程中,然后讨论模型的可观测性,利用平方根UKF算法估计目标的运动状态和传感器配准误差,避免了对非线性方程的线性化,相比传统UKF算法减少了计算量。
Monte-Carlo仿真表明,该方法能同时有效估计目标运动状态和多平台传感器配准误差,且系统偏差的估值迅速收敛到真实值附近,相比传统UKF方法,在相当的估计精度下,具有更快的运算速度和收敛速度。
【总页数】4页(P111-114)
【关键词】机载多平台;数据配准;平方根UKF
【作者】孟宏峰;刘兆磊;胡学成;俞建国;马岳飞
【作者单位】南京电子技术研究所
【正文语种】中文
【中图分类】TN953
【相关文献】
1.基于MLR的机动平台传感器误差配准算法 [J], 崔亚奇;熊伟;何友
2.基于无味卡尔曼滤波的多平台多传感器配准算法 [J], 王兵;王建华;张冰
3.基于 ICP 算法的非常规航空影像与机载 LiDAR 数据配准 [J], 杜全叶;麦晓明;褚福侠;彭向阳;王锐
4.基于期望最大化与容积卡尔曼平滑器的机载多平台多传感器系统误差配准算法[J], 程然;贺丰收;缪礼锋
5.基于扩展Kalman滤波的空基多平台多传感器数据配准和目标跟踪算法 [J], 徐毅;陈非;敬忠良;金德琨
因版权原因,仅展示原文概要,查看原文内容请购买。
基于SR-UKF算法的锂电池SOH预测

基于SR-UKF算法的锂电池SOH预测
陈德海;杨程;邱福亮
【期刊名称】《现代电子技术》
【年(卷),期】2022(45)18
【摘要】传统的扩展卡尔曼滤波(EKF)算法估计精度较低,无迹卡尔曼滤波(UKF)算法不能确保滤波过程中状态误差协方差矩阵非负性,因而易出现滤波发散问题。
为此,文中通过平方根无迹卡尔曼滤波(SR-UKF)算法预测锂电池健康状态(SOH)。
首先,利用UT变换对系统进行线性化处理;然后,利用状态误差协方差矩阵的平方根替代状态误差协方差矩阵,保证状态误差协方差矩阵非负性;其次,构建二阶RC等效电路模型,根据最小二乘法辨识模型初始参数;最后,将代表SOH的欧姆内阻作为状态变量,使用SR-UKF实时估计欧姆内阻,并根据欧姆内阻与SOH的关系获取锂电池的SOH。
为验证SRUKF算法在不同放电情况下的适应性,通过恒流放电工况和HPPC放电工况对SR-UKF算法进行仿真。
结果表明,相比于传统的EKF算法、UKF算法,SR-UKF算法预测欧姆内阻的效果更好。
【总页数】5页(P117-121)
【作者】陈德海;杨程;邱福亮
【作者单位】江西理工大学电气工程与自动化学院
【正文语种】中文
【中图分类】TN713-34;TM911
【相关文献】
1.基于联合算法的锂电池SOC与SOH协同在线预测
2.基于PSO-RBF算法的锂电池SOH研究与预测
3.基于LSTM的锂电池储能装置SOC与SOH联合预测
4.基于Douglas-Peucker融合闵式距离的锂电池健康因子提取及SOH预测
5.基于充电过程的锂电池SOH估计和RUL预测
因版权原因,仅展示原文概要,查看原文内容请购买。
关于离心机及rpm单位与g(RCF)单位的换算

关于离心机及rpm单位与g(RCF)单位的换算离心技术在生物科学,特别是在生物化学和分子生物学研究领域,已得到十分广泛的应用,每个生物化学和分子生物学实验室都要装备多种型式的离心机。
离心技术主要用于各种生物样品的分离和制备,生物样品悬浮液在高速旋转下,由于巨大的离心力作用,使悬浮的微小颗粒(细胞器、生物大分子的沉淀等)以一定的速度沉降,从而与溶液得以分离,而沉降速度取决于颗粒的质量、大小和密度。
基本原理:当一个粒子(生物大分子或细胞器)在高速旋转下受到离心力作用时,此离心力“F”由下式定义,即:F = m&S226;a = m&S226;ω2 ra — 粒子旋转的加速度, m — 沉降粒子的有效质量,ω—粒子旋转的角速度, r—粒子的旋转半径( cm )。
通常离心力常用地球引力的倍数来表示,因而称为相对离心力“ RCF ”。
或者用数字乘“g”来表示,例如25000×g,则表示相对离心力为25000。
相对离心力是指在离心场中,作用于颗粒的离心力相当于地球重力的倍数,单位是重力加速度“g”(980cm/sec2),此时“RCF”相对离心力可用下式计算:∴19×10-5×(rpm)2 rRCF = 1.1( rpm — revolutions per minute每分钟转数,r/min )由上式可见,只要给出旋转半径r,则RCF和rpm之间可以相互换算。
但是由于转头的形状及结构的差异,使每台离心机的离心管,从管口至管底的各点与旋转轴之间的距离是不一样的,所以在计算是规定旋转半径均用平均半径“ra v”代替:ra v=( r min+rmax) / 2一般情况下,低速离心时常以转速“rpm”来表示,高速离心时则以“g” 表示。
计算颗粒的相对离心力时,应注意离心管与旋转轴中心的距离“r”不同,即沉降颗粒在离心管中所处位置不同,则所受离心力也不同。
因此在报告超离心条件时,通常总是用地心引力的倍数“×g”代替每分钟转数“rpm”,因为它可以真实地反映颗粒在离心管内不同位置的离心力及其动态变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
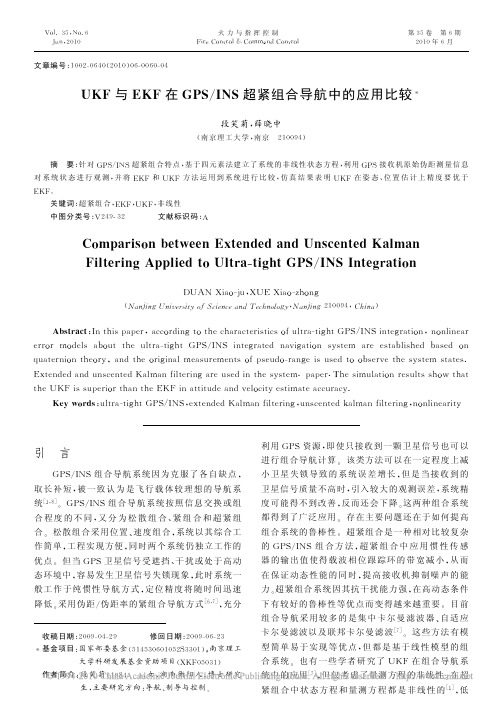
第18卷第3期中国惯性技术学报V ol.18 No.3 2010年6月 Journal of Chinese Inertial Technology Jun. 2010 文章编号:1005-6734(2010)03-0382-05Application of unscented Kalman filter in identification of INSerror parameters based on centrifuge testSU Bao-ku, CHEN Cai, GUO Gang(Space Control and Inertial Technology Research Center, Harbin Institute of Technology, Harbin 150001, China)Abstract:In order to identify the error parameters of inertial navigation platform in the centrifuge testing, a non-linear model of INS for the identification with a direct method is established. According to the actual system model, the standard unscented Kalman filter(UKF) algorithm is simplified and improved. Compared with the standard UKF, the improved algorithm has the same filtering precision, simpler configuration and lower calculation load. An extended Kalman filter(EKF) algorithm and the improved UKF algorithm are applied respectively to identify the error parameters of INS based on centrifuge test. The simulation results demonstrate that the improved UKF algorithm is more precise in INS error parameter identification and easier to implement than EKF algorithm.Key words:inertial navigation platform; nonlinear filtering; parameter identification; unscented Kalman filter algorithm UKF在惯导平台误差系数辨识离心机测试中的应用苏宝库,陈 才,郭 刚(哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨 150001)摘要:针对惯导平台误差系数辨识的离心机测试,利用直接法建立了误差系数辨识的非线性模型,并结合实际系统模型的特点对标准UKF算法进行了简化和改进。
改进后的UKF结构简单,与标准UKF具有同样的滤波精度,并且减小了计算量,提高了计算效率。
然后利用扩展Kalman滤波(EKF)算法和改进的UKF算法对惯导平台误差系数辨识离心机测试进行仿真。
结果表明,与EKF算法相比,改进的UKF算法能提高惯导平台误差系数的辨识精度,并且更容易实现。
关键词:惯导平台;非线性滤波;参数辨识;UKF算法中图分类号:U666.1 文献标志码:AThe inertial navigation system (INS) is the key component of navigation system, and its precision is mainly decided by the inertial measuring instruments’ precision[1]. Generally, there are two approaches for improving the INS precision: the first way is to increase the inertial measuring instruments’ precision, however, their research cost is too high; the other one is to establish the error model of the INS, then identify their error parameters, which can be used to compensate the precision of the INS, through laboratory testing. Obviously, the second way is more economical and effective in improving the INS’s precision .In fact, the error model of an INS is a nonlinear model. And the most common application of nonlinear estimation algorithm is the Extended Kalman filter (EKF), which simply linearizes all nonlinear models based on Taylor series approximation[2]. However, linearization usually introduces significant biases or errors in practice. The EKF can also be prohibitively difficult to implement because deriving Jacobian matrices can be error-prone and time consuming (especially when the system is complicated and of high order) [3].To overcome those limitation of EKF, an Unscented Kalman filter (UKF) was developed by Julier and Uhlmann[4]. The UKF收稿日期:2010-01-18;修回日期:2010-02-18基金项目:国家安全重大基础研究项目(973-61334)作者简介:苏宝库(1941—),男,教授,博士生导师。
E-mail:subk@第3期 苏宝库等:UKF 在惯导平台误差系数辨识离心机测试中的应用 383 use the unscented transformation to propagate mean and covariance information through nonlinear transformations. The advantage of unscented transformation over the Taylor series based approximation is that unscented transformation is better at capturing the higher order moments caused by the nonlinear transform, as discussed in Ref.[5]. In addition, the Jacobian matrices are not needed, so the estimation procedure is easier and less error-prone. Compared with EKF, the UKF is more accurate, easier to implement, and uses the same order of calculations as EKF.In this paper, we establish the system model of INS with a direct method, then simplify the standard UKF and improve the filter algorithm according to the properties of the system model. The improved UKF algorithm and the EKF are applied to identify the error parameters of INS based on centrifuge testing. Those identification results are compared in the simulation section.1 System Mathematical ModelsIn this paper, the identification for the error parameters of INS is based on the centrifuge testing. In order to avoid the linearization for nonlinear state equations, we use the direct method to establish system model [6].1.1 Error model of the INSIn order to achieve the desired modeling accuracy without unnecessarily increasing the complexity of the model, it was determined that 18 unknown parameters for the INS are needed [7]. Then the error model of the INS is given as follows:010010010011012013001101201300110120130=+=+=+=+A +A +A =+D A +A +A =+A +A +A X X X X Y Y Y Y Z Z Z Z X X X X X Y X Z Y Y Y X Y Y Y Z Z Z Z X Z Y Z ZA K K A a A K K A a A K K A a D D D D D D D D D D D ωωω⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩ (1) whereK 0 are unknown accelerometer biases, and K 1 are unknown accelerometer scale factors;D 0 are unknown gyro fixed drift, and D 1 are unknown gyro mass unbalance parameters;A 0 are applied accelerations along each axes.1.2 State and measurement equationsIn the identification program, the objective is to obtain the estimates of INS unknown parameters. Therefore, all the unknown parameters in equation (1) are defined as state variables. In addition, three Euler angles(α, β, γ) that represent the system dynamic motion of the INS are also defined as state variables. Then the state variables for error parameters identification of INS based on centrifuge testing can be defined as follows:[]T010101011121301112130111213=,,,,,,,,,,,,,,,,,,,,X X Y Y Z Z X X X X Y Y Y Y Z Z Z Z K K K K K K D D D D D D D D D D D D αβγXThe nonlinear state vector equation of the INS for the identification program is given as follows: ()=(())+()t t t XF X W (2) where, ()t W is a zero mean, Gaussian white, vector and disturbance process, and()()19212120202121212120212020=0=1,2,,17,18=cos -sin =sin +cos =sin sin -cos sin +i X Y X Y Y X ZF i F x x x F x x F x x x x x ωωωωωωω⎧⎪⎪⋅⋅⎪⎨⋅⋅⎪⎪⎪⋅⋅⋅⋅⎩"384 中国惯性技术学报 第18卷Furthermore, we take the output of three accelerations in the INS as the output measurement.[]T=,,X Y Z A A A a a a Z And the measurement equation is based on the INS acceleration model in equation (1) [8].()=(())+()t t t Z H X M (3)where, (())t H X is a 3-dimensional vector-valued function of the state, and ()t M is a 3-element measurement noise vector.The state and measurement equations are in continuous form, but the measurements are obtained at discrete time points. Therefore, we should discretize equation (2) and (3) so that we can develop the filter equations using the discrete form of filter algorithm.2 Design of Filtering Algorithm2.1 The standard UKF algorithmConsider a discrete nonlinear system described as follows:11=(,,-1)k k -k -k X F X W (4)=(,,)k k k k Z H X V (5)A standard UKF consists of the following steps:Step 1: Set the initial values for state mean 0ˆX and error covariance 0P . Then form the disturbance process and the measurement noise vectors into the augmented state variables as follows:a T T T =⎡⎤⎣⎦X X W V , T a a T 000ˆˆ=E =00⎡⎤⎡⎤⎣⎦⎣⎦X X X , ()()0T a a a a a 000000000ˆˆ=E =0000⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦--P P X X X X Q R Step 2: Compute the matrix of sigma points for the augmented system and calculate the relevant weights, which are defined as follows:a a a a 1111ˆˆˆ=X k -k -k -k -X X χ⎡⎣-, )0=+m W n λλ, ()()c 20=++1+W n λλαβ−, ()==12+=1,2,,2m c i i W W n i n λ⎡⎤⎣⎦"Step 3: Compute the predicted state mean and the predicted covariance as: a a |11=k k -k -F χχ⎡⎤⎣⎦ (6)2a a ,|1=0ˆ=nm k i i k k -i X W χ∑ (7)2Tac a a a a |1,|1,|1=0ˆˆ=+n k k -i i k k -k i k k -k k i ⎡⎤⎡⎤−−⎣⎦⎣⎦∑P W X X Q χχ (8) a |1|1=k k -k k -⎡⎤⎣⎦Z H χ (9) 2,|1=0ˆ=nm k i i k k -i Z W Z ∑ (10)Step 4: Update state mean and error covariance as:k k 2T ac i i,k|k-1k i,k|k-1k k Z Z =0=--+n i ⎡⎤⎡⎤⎣⎦⎣⎦∑P W Z Z Z Z R (11)2T a c a a ,|1,|1=0ˆ=--k k n x i i k k -k i k k -k i ⎡⎤⎡⎤⎣⎦⎣⎦∑Z P W χX Z Z (12)()a 1a a =k k k k -k Z Z X Z K P P (13)第3期 苏宝库等:UKF 在惯导平台误差系数辨识离心机测试中的应用 385()a a ˆˆ=+k k k k k-X X K Z Z (14) a a a T |-1=k k k k k k k -Z Z P P K P K (15)2.2 The improved UKF algorithmWe can find that all the disturbance process and the measurement noise vectors are augmented as the state variables in the standard UKF. And the dimension of the augmented state matrix is much larger than that of the original state variable, which will cause lots of calculation for the filter.Fortunately, the disturbance process and the measurement noise discussed in this paper are additive for the system, which means the augment process for the state variables is not necessary. In addition, the measurement equation for the system is a linear one. Therefore, we can simplify the standard UKF and improve the filter algorithm as follows:1) Maintain the number of state variables without augment process;2) Rewrite the equation (9) as |1|1=k k -k k -χZ H (16)Then substitute equation (16) into equation (11) and (12). Finally, we can get the improved UKF algorithm.3 Simulation ResultsThis section applies and compares the performance of the improved UKF against an EKF for the parameters identification of INS based on centrifuge testing. In this simulation, we assume that the applied acceleration provided by centrifuge rotation is 10g level, where g represents local gravity acceleration. The axes of INS are aligned with the east, north, and up directions. The rotation radius of the centrifuge is 2.5 m, so the rotation angular rate of the centrifuge is 2π rad/s. The measurement cycle is 0.04 s, and the simulation time is 800 s. The simulation results are shown in Fig.1 and Fig.2, where REF represents the reference values of those unknown parameters for INS.Fig.1 Identification results of INS accelerometer parameters386 中国惯性技术学报第18卷The simulation results show that the improved UKF is better than EKF in estimating those unknown parameters of INS because the EKF linearization for the INS nonlinear model introduces biases or errors to the system, while the UKF overcomes this drawback with the unscented transformation. Moreover, the UKF uses the same order of calculations as EKF.Fig.2Identification results of INS gyro parameters4 ConclusionThe UKF is a simple and efficient approach for solving linear and nonlinear problems. Compared with EKF, the UKF is more accurate and easier to implement because it does not involve any linearization steps, eliminating the derivation and evaluation of Jacobian matrices. Meanwhile, it uses the same order of calculations as EKF.In this paper we establish the system model of INS with the direct method, then simplify the standard UKF and improve the filter algorithm according to the practical system model. The simulation results demonstrate that the improved UKF algorithm can improve the identification precision of INS error parameters.References:[1] Wang H G, Williams T C.Strategic inertial navigation systems-high-accuracy inertially stabilized platforms for hostileenvironments [J]. IEEE Control Systems Magazine, 2008, 28(1): 65-85.[2] Romanenko R, CasLro J. The unscented filler as an alternative to the EKF for nonlinear state estimation: A simulation casestudy [J]. Computers and Chemical Engineering, 2004, 28(3): 347-355.[3] Julier S, Uhlmann J, Durrant-Whyte H F. A new method for the nonlinear transformation of means and covariance in filtersand estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 477-482.[4] Julier S, Uhlmann J. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE Aerospace and ElectronicSystems, 2004, 92(3): 401-422.[5] 杨波,秦永元,柴艳. UKF在INS/GPS直接法卡尔曼滤波中的应用[J]. 传感技术学报,2007,20(4):842-846.YANG Bo, QIN Yong-yuan, CAI Yan. Application of UKF in direct method of Kalman filter for INS/GPS[J]. Chinese Journal of Sensors and Actuators, 2007, 20(4): 842-846.[6] IEEE recommended practice for inertial sensor test equipment, instrumentation, data acquisition, and analysis[S]. IEEE Std1554TM-2005.[7] Frazier J H. Application of extended Kalman filtering to a dynamic laboratory calibration of an inertial navigation system[R].1973, AD 763718: 109-175.[8] 张敏虎,任章,华春红. UKF在深组合GPS/INS导航系统中的应用[J]. 中国惯性技术学报,2009,17(6):697-700.ZHANG Min-hu, REN Zhang, HUA Chun-hong. Application of UKF in deeply coupled GPS/INS navigation system[J].Journal of Chinese Inertial Technology, 2009, 17(6): 697-700.。