快速中值滤波算法
中值滤波的快速算法
中值滤波的快速算法
中值滤波的快速算法有很多种,常见的有以下几种:
1. 快速排序算法:使用快速排序对滤波窗口中的像素值进行排序,然后取排序后的中间值作为滤波结果。
这种算法时间复杂度为O(nlogn),其中n是滤波窗口的大小。
2. 快速选择算法:快速选择算法是一种改进的快速排序算法。
它不需要完全对滤波窗口进行排序,而是通过选择一部分元素进行比较,找到第k小的值。
这种算法时间复杂度为O(n),
其中n是滤波窗口的大小。
3. 堆排序算法:使用堆数据结构对滤波窗口中的像素值进行排序,然后取堆顶元素作为滤波结果。
这种算法时间复杂度为
O(nlogn),其中n是滤波窗口的大小。
4. 快速中值滤波算法:该算法使用线性时间的中值搜索算法,通过选择一个约束条件,将滤波窗口中的像素分成两个部分,然后在这两个部分中搜索中值。
这种算法时间复杂度为O(n),其中n是滤波窗口的大小。
以上是常见的几种中值滤波的快速算法,根据实际应用场景和需求可以选择适合的算法。
中值滤波算法
中值滤波算法本文提出一种中值滤波算法,该算法充分地利用相邻两次中值滤波窗口内数据的相关性。
中值滤波算法在运算过程中通过对有序序列快速的对半查找和内插操作,重构有序序列,占L面得到各中值算法很大地提高了运算效率-计算机模拟寝明该方法是有效的。
在数字信号处理中,经常会遇到对信号数据作平滑处理。
局部平均滤波是常用的一种算法,若是对具有随机脉冲噪声的信号进行处理,虽然脉冲噪声有所衰减,但它对滤波结果仍有显著的影响。
中值滤波却是对窗内数据进行大小的排序,取结果的中间项对应的值,这样脉冲噪声就不起作用,不影响中值结果 所以,中值滤波在有随机脉冲噪声的情况下,能较好地保护原始信号。
中值滤波的主要运算就是对窗口内的信号数据序列进行排序。
文[4]提出的二维中值滤波快速算法,只适用于幅度量化级为极其有限的数据(如:数字图象处理中的象素幅度,若是用单字节(8位二进制存贮单元)存放,共有28=256个灰度级),原因是要给每个量化级设置一个作为计数器的存贮单元。
文[5—8]的方法也是针对于幅度量化级为有限的数据。
若是数据为任意大小或精度的浮点数,则以上的方法不适用,通常采用每次对窗内数据排序并输出相应的中值。
假设原始信号数据序列的长度为 ,表示为{ (O),x(1),⋯,x(M-1)},窗口长度为2^r+1,表示为{ (O), (1),⋯, (2Ⅳ)},共需要 一2N次对长度为2N+l的窗内数据序列分别进行排序。
要进行排序,就必须对序列中数据元索做比较和交换.数据元素问的比较次数是影响排序速度的一个重要因素。
一般认为,对 个元素进行排序时,所需的比较次数在理论上的最小值为 0(n|og。
n) 当原始信号数据序列较长或窗口较大时,用这种传统中值滤波方法是十分费时的。
文[9]提出把相邻两次的中值滤波合并为一次进行,只做一次排序。
从而,总的排序次数减少一半,运算时间节省约一半本文提出一种中值滤波的快速算法,避免了反复对无序序列排序,而只对有序序列进行数据元素的快速查找和内插,实现中值滤波.中值滤波的快速算法本文提出的中值滤波的快速算法的基本思想是:原始数据序列上中值滤波的滑窗在移动过程中,当前窗只要删除其最早的元素,加入窗后的新元素,即成为下一窗的内容。
基于FPGA的快速中值滤波算法实现
• 98•武汉迈迪克光电股份有限公司陈军旗 南开大学滨海学院 赵凤怡• 99•就能够构建出快速中值滤波的硬件模块,满足图像实时处理的要求。
2 设计实现2.1 滑动窗口模块基于邻域操作的图像处理算法广泛采用滑动窗口技术,用于获取待处理图像相关位置的原始数据(汤露,程姝,基于FPGA的实时中值滤波算法硬件设计,工业控制计算机,2018年第2期20-22页)。
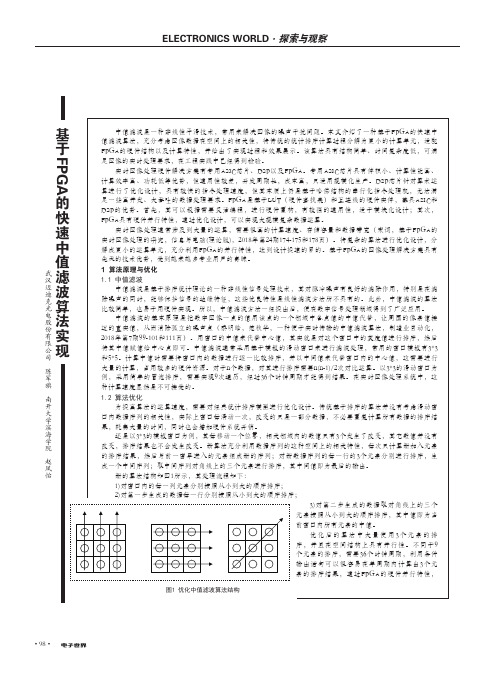
本设计中采用3*3的窗口模板,模块的结构如图2所示。
4个LineBuffer和9个单寄存器组成模块的缓存单元,每个LineBuffer由双口RAM构成,其位宽和存储深度由视频图像的数据规模决定,至少要满足一行数据的存储要求;列缓存对每一行的输出进行移位操作,实现3个元素的顺序输出;多路选择器负责对输入输出的数据进行路由选择,保证输出数据的结构特征,满足算法设计的技术要求。
组成行缓存的4个LineBuffer在视频行同步信号的边沿切换工作状态,形成 “乒乓操作”结构。
任意时刻,保持一个LineBuffer处于写状态,其它三个LineBuffer处于读状态。
在同步信号的控制下依序切换,4个周期形成一个循环,周而复始。
由于4个LineBuffer的输出状态不断切换,为保证输出数据在空间上的顺序关系,需要对输出的3行数据进行重定位。
考虑到算法第一步要求对每一列的数据进行排序,本质上就已经打乱了原始数据的顺序关系。
因此可以直接对LineBuffer的输出数据进行排序输出,这样进入列缓存的数据已经完成算法要求的第一步处理,直接生成了中间序列。
2.2 快速排序算法的原理与与处理流程已经在论文2.2节有详细介绍,其中第一步已经在生成滑动窗口的过程完成,接下来需要对滑动窗口内每一行的三个元素分别进行排序,实现的代码如下所示。
其中X1为第一行的最大值,X2为第二行的中间值,X3为第三行的最小值,它们三个构成第三步对角线上的三个元素。
按照相同的方法,对X(n)重新排序,其中值即为最终的输出结果。
数据处理中的几种常用数字滤波算法
数据处理中的几种常用数字滤波算法
在数据处理中,常用的数字滤波算法有以下几种:
1. 移动平均滤波(Moving Average Filter):将一组连续的数据取
平均值作为滤波结果。
该算法简单易实现,可以有效消除噪声,但会引入
一定的延迟。
2. 中值滤波(Median Filter):将一组连续的数据排序,并取中间
值作为滤波结果。
该算法适用于去除周期性干扰或脉冲噪声,但对于快速
变化的信号可能无法有效滤除。
3. 加权移动平均滤波(Weighted Moving Average Filter):给予
不同的数据点不同的权重,并将加权平均值作为滤波结果。
该算法可以根
据需要调整不同数据点的权重,适用于对不同频率成分有不同抑制要求的
情况。
4. 递推平滑滤波(Recursive Smoothing Filter):根据当前输入
数据与上一次滤波结果的关系,通过递推公式计算得到滤波结果。
递推平
滑滤波可以实现实时滤波,但对于快速变化的信号可能会引入较大的误差。
5. 卡尔曼滤波(Kalman Filter):适用于估计具有线性动力学特性
的系统状态,并结合观测值进行滤波。
卡尔曼滤波算法综合考虑了系统模
型和观测模型的不确定性,因此能够提供较好的估计结果。
这些数字滤波算法在实际应用中可以根据需求进行选择和组合,以实
现对信号的有效滤波和噪声抑制。
中值滤波算法公式
中值滤波算法公式:
中值滤波器在处理图像时,将像素点的值设置为邻域像素值的中值。
具体来说,对于一维情况,如果序列为{x1, x2, ..., xn},中值滤波器的输出为:
median(x1, x2, ..., xn)
对于二维情况,中值滤波器通常用于消除图像中的噪声。
假设有一个二维矩阵,中值滤波器的输出为:
median(x11, x12, ..., x22)
其中,x11, x12, ..., x22是二维矩阵中每个像素点的邻域像素值。
注意:中值滤波算法对于去除图像中的椒盐噪声特别有效,但对于高斯噪声效果较差。
在更具体的应用中,中值滤波算法可以有多种变种。
例如,可以选择不同的邻域大小,可以选择对所有像素应用滤波器,或者只对特定类型的像素应用滤波器。
在某些情况下,还可以使用更复杂的排序算法来计算中值,以提高处理速度。
中值滤波算法的优点是简单且易于实现。
它不需要知道像素的统计特性,也不需要对像素值进行复杂的数学运算。
此外,中值滤波器对于去除由异常值引起的噪声特别有效。
然而,中值滤波算法也有一些局限性。
例如,它可能会改变图像的边缘细节,因为它将像素值设置为邻域像素值的中值,而不是原始像素值。
此外,对于高斯噪声,中值滤波算法可能不是最佳选择,因为高斯噪声的分布特性与中值滤波器的去除效果不太匹配。
在实际应用中,需要根据具体需求选择适当的滤波算法。
中值滤波算法适用于去除椒盐噪声,但对于其他类型的噪声,可能需要使用其他类型的滤波器,如高斯滤波器、均值滤波器或自适应滤波器等。
中值滤波算法公式
中值滤波算法公式
中值滤波算法是一种非线性滤波算法,常用于图像处理中的去噪处理。
其公式为:
1.对于待滤波的像素点,首先确定一个滤波窗口,该窗口的大小可以根据具体需求进行确定。
通常情况下,窗口大小为一个奇数,如3x3、5x5等。
2.将该窗口内的所有像素值进行排序,得到一个有序序列。
3.取有序序列的中间值作为该像素点的滤波结果,即用中值代替原始像素值。
中值滤波的原理是通过排序和取中值来消除噪声,因为中值能够准确反映图像的统计特性,并且对异常值不敏感。
因此,中值滤波算法能够有效地去除椒盐噪声、斑点噪声等,但会对图像细节造成某种程度的模糊。
拓展:
1.彩色图像中值滤波:对于彩色图像,可以将其分解为RGB三个
通道,然后对每个通道独立进行中值滤波处理。
这种方法可以有效去
除彩色图像中的噪声,但会损失一定的彩色信息。
2.自适应中值滤波:在某些情况下,常规的中值滤波可能无法很
好地去除噪声,因为滤波窗口内的像素可能包含了噪声像素。
自适应
中值滤波则通过根据像素点的邻域像素与像素点的灰度差异来调整滤
波窗口的大小和位置,以防止对图像细节的过滤。
3.增强型中值滤波:为了减小中值滤波对图像细节的模糊程度,
可以采用增强型中值滤波算法,该算法在传统的中值滤波基础上,增
加了像素权重的概念,以便更好地保护图像细节信息。
这种滤波算法
一般会通过计算像素差异和窗口内像素之间的相关性来进行权重计算,以便有选择性地滤波图像。
中值滤波算法
中值滤波算法
中值滤波(Median Filter)是一种抗噪声算法,用于消除游戏图片、视频等数字信号中的随机噪声。
在计算机图像处理和互联网领域,中值滤波算法通常用于识别和处理图像中的噪点和潜在的低精度信号,进而改善图像的效果和美观。
中值滤波算法的原理很简单,它是根据被处理的单元的相邻的像素的中值(中间的数)来进行处理的。
该算法具有比较有效的抗噪声能力,它可以忽略邻近像素间不显著的值变化,也能有效降低噪声影响。
这种算法通过它的增强功能,可以从图像中抑制“突变噪声”(椒盐噪声),而不会影响图像的细节。
此外,中值滤波算法与其他抗噪声算法(例如低通和高通滤波算法)都不同,它可以有效地去除图像中的椒盐噪声,模糊算子也可用于处理噪点和低精度信号。
简单来说,中值滤波是一种抗噪声算法,它可以有效地抑制由像素不显著变化而产生的噪声,这种算法在互联网技术中有着广泛应用,有利于改善图像的质量和美观。
因此,使用中值滤波算法可以大大增强图像的质量,展示电影,游戏和广播的幻灯片效果,从而改善用户观看体验并增强电子商务的offerings。
常用的滤波算法
常⽤的滤波算法滤波是传感器处理中的重要算法,经常接触底层常常⽤到,以下总结了⼀些滤波算法,供以后参考调⽤。
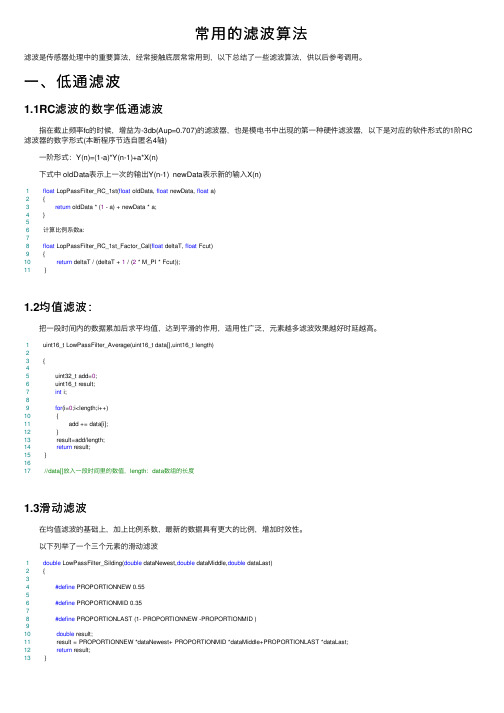
⼀、低通滤波1.1RC滤波的数字低通滤波 指在截⽌频率fc的时候,增益为-3db(Aup=0.707)的滤波器,也是模电书中出现的第⼀种硬件滤波器,以下是对应的软件形式的1阶RC 滤波器的数字形式(本断程序节选⾃匿名4轴) ⼀阶形式:Y(n)=(1-a)*Y(n-1)+a*X(n) 下式中 oldData表⽰上⼀次的输出Y(n-1) newData表⽰新的输⼊X(n)1 float LopPassFilter_RC_1st(float oldData, float newData, float a)2 {3 return oldData * (1 - a) + newData * a;4 }56 计算⽐例系数a:78 float LopPassFilter_RC_1st_Factor_Cal(float deltaT, float Fcut)9 {10 return deltaT / (deltaT + 1 / (2 * M_PI * Fcut));11 }1.2均值滤波: 把⼀段时间内的数据累加后求平均值,达到平滑的作⽤,适⽤性⼴泛,元素越多滤波效果越好时延越⾼。
1 uint16_t LowPassFilter_Average(uint16_t data[],uint16_t length)23 {45 uint32_t add=0;6 uint16_t result;7 int i;89 for(i=0;i<length;i++)10 {11 add += data[i];12 }13 result=add/length;14 return result;15 }1617 //data[]放⼊⼀段时间⾥的数值,length:data数组的长度1.3滑动滤波 在均值滤波的基础上,加上⽐例系数,最新的数据具有更⼤的⽐例,增加时效性。
十大滤波算法范文
十大滤波算法范文滤波算法是信号处理中常用的一种技术,用于去除噪声、平滑数据、提取频率成分等。
以下是十大常用的滤波算法:1. 均值滤波算法(Mean Filter):计算邻域像素的平均值来代替当前像素值,适用于去除随机噪声。
2. 中值滤波算法(Median Filter):用邻域像素的中值来代替当前像素值,适用于去除脉冲噪声。
3. 高斯滤波算法(Gaussian Filter):按照高斯函数计算权重,对邻域像素进行加权平均,适用于光滑数据且保留边缘细节。
4. 锐化滤波算法(Sharpening Filter):增强图像的边缘和细节,通过将原始图像与低通滤波器生成的图像相减得到。
5. 无限脉冲响应滤波算法(Infinite Impulse Response Filter,IIR Filter):使用递归差分方程计算输出,具有较低的计算复杂度和较好的频率响应。
6. 有限脉冲响应滤波算法(Finite Impulse Response Filter,FIR Filter):使用有限长度的冲激响应作为滤波器的权重系数,适用于数字滤波器设计。
7. 快速傅里叶变换滤波算法(Fast Fourier Transform Filter,FFT Filter):将时域信号转换为频域信号进行滤波,适用于频域处理。
8. 卡尔曼滤波算法(Kalman Filter):通过将测量值与模型预测值进行加权平均,适用于估计系统状态和减少噪声。
9. 维纳滤波算法(Wiener Filter):通过最小均方误差准则对输入信号进行估计,适用于信号恢复和去噪。
10. 自适应滤波算法(Adaptive Filter):根据输入信号的特性调整滤波器的参数,适用于未知统计特性的信号处理。
以上是十大常用的滤波算法,它们都有各自的适用场景和优劣势。
在实际应用中,选择合适的滤波算法对于信号处理的效果至关重要。
基于硬件描述语言的图像快速中值滤波算法
绍 的方法 进行快速 中值 滤波 ,效果
如 图4 所示 。
将 中值 滤波 后 的 图像 与原 始 图 像作 比较可以发现,中值滤波算法导
L・ 帆 鞭围 5卅 j 声圈 0 粒蚺 快速中崖潞城散果圈
致 图形边界稍微变得模糊 了一些 ,但
图2
图4
不 明显 ,而椒盐 噪声 干扰被 很好地
‘
‘
‘
秒 。显然基 于硬件 描述语 言 的快速 中值滤波 比基于D P S 的解决方案有更
‘
数 据置新分蛆
好 的实时性优势 。 对 数字 图像 处理标 准 图L n J e aJ  ̄
上
图3
v
入5 % 0 的椒盐噪声 ,然后采用本文介
Il a IIm ‰. i Vn 3
S p r eouin o gsa dVi oM] u e R s lt f ma e n d [ . o I e
M o g n& C a p o u l h r .0 7 ra ly o l bi es 0 . P s 2
法经过 并行和 流水 结构进 行硬件 优 中。当摄像机 输出图像 的n 2 + 行数据 【 Ageo Kasg eo,aal l a 3 glsK. t gls fe Moi . ] a R n
n_ ) 2 脉冲噪声的概率密度 函数可 由下 次 要进 行n (z 1 / 次 排序 比较 运 较器 比较得 出最终 结果 。这样总 处
算 ,例如 ,要使 用3 型 窗 口处 理 理时 间只是其 中关键 模块 的处理 时 ×3
I P z
一
pz={6 z b ( ) P = l 其它 0
往被 噪 声淹 没 ,视频 图像 的缺损对 既去 除噪声又 保护 图像边 缘 ,对 干 碍 ,对煤 矿生 产造成 安全 隐患 。保 作用 ,对 图像 边缘 能较 好地保 持 。 优化的思路是将二维滤波阵列分 管 理人 员监控 井下实 时情 况造成 障 扰 脉冲 和 点状 噪 声具有 良好 的抑 制 解为一维 ,先求 出滤波窗 口中水平各
快速中值滤波 c代码
快速中值滤波 c代码快速中值滤波是一种非线性信号处理技术,通常用于消除图像或信号中的噪声。
以下是一个简单的快速中值滤波器的C代码实现。
这个实现使用了简单的排序算法,因此对于大数据集可能不是最优的,但对于小到中等大小的数据集,它的性能应该是可以接受的。
c#include <stdio.h>#include <stdlib.h>// 函数声明void findMedian(int arr[], int n, int *median);// 函数定义void findMedian(int arr[], int n, int *median) {// 冒泡排序,对于小的数据集可以直接使用简单的排序算法for(int i = 0; i < n; i++) {for(int j = 0; j < n - i - 1; j++) {if(arr[j] > arr[j+1]) {int temp = arr[j];arr[j] = arr[j+1];arr[j+1] = temp;}}}*median = arr[n/2]; // 计算中值}// 主函数int main() {int arr[] = {1, 2, 3, 4, 5, 6, 7, 8, 9}; // 输入数组int n = sizeof(arr) / sizeof(arr[0]); // 数组长度int median; // 中值findMedian(arr, n, &median); // 找到中值printf("The median of the array is: %d\n", median); // 输出中值return 0;}以上代码实现了一个简单版本的快速中值滤波器。
请注意,在实际使用中,可能需要根据应用的具体需求对代码进行相应的修改和优化。
中值滤波算法公式(一)
中值滤波算法公式(一)中值滤波算法公式1. 算法简介中值滤波是一种常用的图像处理算法,用于去除图像中的噪声。
它的基本原理是将目标像素周围邻域内的像素值排序,并取排序后的中值作为目标像素的新值。
2. 中值滤波算法步骤中值滤波算法可以分为以下几个步骤:定义邻域大小首先需要定义中值滤波的邻域大小,即选取目标像素周围的像素个数。
通常情况下,邻域大小为一个正方形区域。
提取邻域内的像素值然后根据定义的邻域大小,提取目标像素周围邻域内的像素值。
对提取的像素值排序对提取的像素值进行排序,通常采用从小到大的排序方式。
计算中值根据排序后的像素值,计算中值。
如果邻域大小为奇数,则取排序后的中间值作为中值;如果邻域大小为偶数,则取排序后中间两个像素值的平均值作为中值。
更新目标像素用计算得到的中值来更新目标像素的值。
3. 中值滤波算法示例以下是一个简单的中值滤波算法的示例,采用3×3的邻域大小:1.定义邻域大小为3×3的正方形区域。
2.提取目标像素周围邻域内的像素值:–假设目标像素位置为(x, y),则提取的邻域内的像素值为(p1, p2, p3, p4, p5, p6, p7, p8, p9),其中p1为(x-1,y-1)处的像素值,p2为(x, y-1)处的像素值,依此类推。
3.对提取的像素值进行排序,得到排序后的像素值序列(p1, p2,p3, p4, p5, p6, p7, p8, p9)。
4.计算中值:–由于邻域大小为奇数,排序后的中间值即为中值,即中值为p5。
5.将计算得到的中值p5用于更新目标像素的值。
通过以上步骤,我们可以得到中值滤波算法的输出,即更新后的图像。
中值滤波算法在图像去噪方面有着广泛的应用,能有效地去除椒盐噪声等常见噪声,保持图像的边缘和细节信息。
中值滤波快速算法的进一步思考
2种新 的不 需要排序或 者进 行少 量排 序而能够 直接计算 中值
近似值的方法。经过深入分析和反复实验 , 为利用分治法 计 认
ag rt m of lo h i me a fl rn dv d din i ti g, ii e—a d—c n e m eh d. e n o qu r t o Exp rm e t e uls ho e i n r s t s w t a t ls ag rt m . i ie—a d — o qu h t he a t l o ih d vd n c n er me h d,s e y f c e t o lr e t o i v r e i n fr a g wi o i nd w e s i a g e t i a e,t n r al mprv t s e o din lo t c y o e he pe d f me a ag r hm i K e w o ds: medan ile n f t lo ih ;o t lort ; n o y r i f t r g;as ag rt m s r ag i hm wi d w i
文 章编 号 :0 2 8 3 (0 7 2 — 0 8 0 文 献 标 识 码 : 中 图 分 类 号 :P 0 10 — 3 12 0 )6 0 4 — 2 A T31
1 引言
由于种种原因 , 图像在生成 、 、 传输 变换过程 中总会受到各
种噪声的污染 , 从而导致图像质量退化 。噪声信号的滤波是图
维普资讯
4 8
20 ,3 2 ) 0 74 (6
C m ue nier g a dA piaos计算机 工程 与应用 o p t E gnei n p l (i r n c n
中值滤波的几种快速算法
中值滤波的⼏种快速算法我想学过图像处理的⼈没有⼈会不知道中值滤波的,最早的时候我是在冈萨雷斯的图像处理课本[1]中学到的,后来在看Sonka的书[2]的时候⼜看到了中值滤波的介绍,下⾯我试着结合课本所学和⽹上的资料⾃⼰整理⼀篇中值滤波的介绍。
中值滤波器是⼀种统计排序滤波器,由Tukey于1971年在⽂献[3]中提出。
所谓的统计排序滤波器是⼀种⾮线性的空间滤波器,它的响应基于图像滤波器包围的图像区域中像素的排序,然后⽤统计排序结果决定的值代替中⼼像素的值。
除了中值滤波器外,最⼤值滤波器和最⼩值滤波器也是统计排序滤波器。
在介绍中值滤波器之前,我们先来了解⼀下中值的概念,中值是⼀个将概率分布的⾼半部分与低半部分分开的值。
对⼀个随机变量x⽽⾔,x<M的概率为0.5。
对于有限实数集,其排序后中间的数值即为它的中值。
这样,我们就可以很清楚的知道,中值滤波就是将邻域内像素(包括中⼼像素值)灰度值的中值代替中⼼像素的值。
在图像处理中,中值滤波的使⽤⾮常的普遍,这是因为对于⼀定类型的随机噪声,它提供了⼀种优秀的去噪能⼒,相⽐于⼩尺⼨的线性平滑滤波器的模糊程度要低很多。
⽽且它对处理脉冲噪声(椒盐噪声)⾮常有效。
那它为什么能够去噪呢?我们知道,因为噪声的出现,使某像素点⽐周围的像素亮(暗)许多,若与周围的像素值⼀起排序,噪声点则位于序列的前端或末端,序列中值通常没有受到噪声污染,因此,可以⽤中值取代原像素值来达到出去噪声的效果。
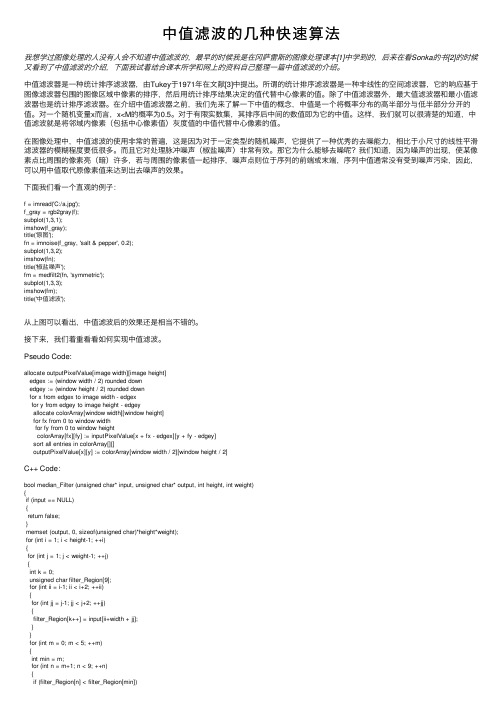
下⾯我们看⼀个直观的例⼦:f = imread('C:/a.jpg');f_gray = rgb2gray(f);subplot(1,3,1);imshow(f_gray);title('原图');fn = imnoise(f_gray, 'salt & pepper', 0.2);subplot(1,3,2);imshow(fn);title('椒盐噪声');fm = medfilt2(fn, 'symmetric');subplot(1,3,3);imshow(fm);title('中值滤波');从上图可以看出,中值滤波后的效果还是相当不错的。
中值滤波算法
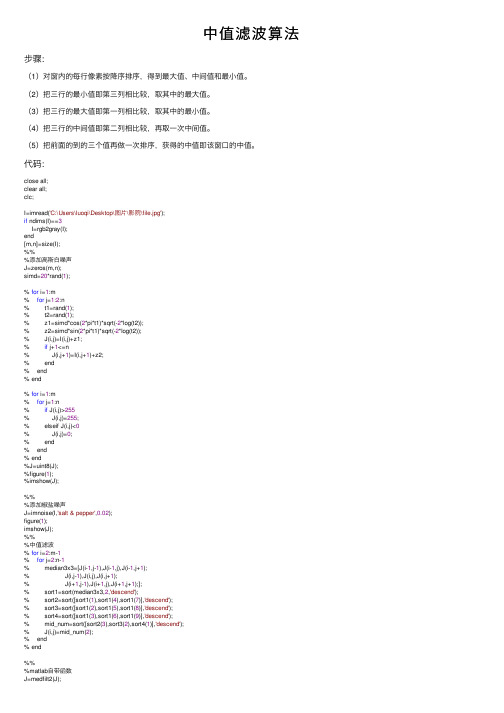
中值滤波算法步骤:(1)对窗内的每⾏像素按降序排序,得到最⼤值、中间值和最⼩值。
(2)把三⾏的最⼩值即第三列相⽐较,取其中的最⼤值。
(3)把三⾏的最⼤值即第⼀列相⽐较,取其中的最⼩值。
(4)把三⾏的中间值即第⼆列相⽐较,再取⼀次中间值。
(5)把前⾯的到的三个值再做⼀次排序,获得的中值即该窗⼝的中值。
代码:close all;clear all;clc;I=imread('C:\Users\luoqi\Desktop\图⽚\影院\file.jpg');if ndims(I)==3I=rgb2gray(I);end[m,n]=size(I);%%%添加⾼斯⽩噪声J=zeros(m,n);simd=20*rand(1);% for i=1:m% for j=1:2:n% t1=rand(1);% t2=rand(1);% z1=simd*cos(2*pi*t1)*sqrt(-2*log(t2));% z2=simd*sin(2*pi*t1)*sqrt(-2*log(t2));% J(i,j)=I(i,j)+z1;% if j+1<=n% J(i,j+1)=I(i,j+1)+z2;% end% end% end% for i=1:m% for j=1:n% if J(i,j)>255% J(i,j)=255;% elseif J(i,j)<0% J(i,j)=0;% end% end% end%J=uint8(J);%figure(1);%imshow(J);%%%添加椒盐噪声J=imnoise(I,'salt & pepper',0.02);figure(1);imshow(J);%%%中值滤波% for i=2:m-1% for j=2:n-1% median3x3=[J(i-1,j-1),J(i-1,j),J(i-1,j+1);% J(i,j-1),J(i,j),J(i,j+1);% J(i+1,j-1),J(i+1,j),J(i+1,j+1);];% sort1=sort(median3x3,2,'descend');% sort2=sort([sort1(1),sort1(4),sort1(7)],'descend');% sort3=sort([sort1(2),sort1(5),sort1(8)],'descend');% sort4=sort([sort1(3),sort1(6),sort1(9)],'descend');% mid_num=sort([sort2(3),sort3(2),sort4(1)],'descend');% J(i,j)=mid_num(2);% end% end%%%matlab⾃带函数J=medfilt2(J);figure(2) imshow(J);。
中值和均值滤波算法
中值和均值滤波算法中值滤波和均值滤波是两种常用的图像滤波算法,它们可以有效地去除图像中的噪声。
本文将分别介绍中值滤波和均值滤波的原理、算法以及它们的应用。
中值滤波是一种非线性滤波算法,其核心思想是将每个像素点的灰度值替换为其周围像素点灰度值的中值。
这样做的好处是可以有效地去除椒盐噪声等孤立的噪声点,而不会使图像变模糊。
中值滤波的算法如下:1.选择一个适当的窗口大小,窗口的大小通常为奇数,以确保有一个中心像素。
2.将窗口中的像素按照灰度值大小进行排序,找到中间位置的像素值。
3.将该中间像素值替换为原始像素值。
中值滤波算法的优点是简单高效,在去除椒盐噪声等孤立噪声点的同时,能够保持图像的边缘和细节。
均值滤波是一种线性滤波算法,其核心思想是用周围像素点的平均值替代当前像素点的值。
均值滤波的算法如下:1.选择一个适当的窗口大小。
2.将窗口中的像素值求平均,得到一个新的像素值。
3.将该新像素值替换为原始像素值。
均值滤波算法的优点是简单易实现,计算速度快。
它可以有效地去除高斯噪声等随机噪声,但在去除椒盐噪声等孤立噪声点的效果稍差。
中值滤波和均值滤波广泛应用于图像降噪、图像增强等领域。
它们各自有适用的场景。
中值滤波适用于去除孤立噪声点较多的图像,而均值滤波适用于去除随机噪声较多的图像。
此外,中值滤波适用于去除椒盐噪声等孤立噪声点,而均值滤波可能会模糊图像细节。
在实际应用中,根据图像的特点和滤波效果要求,可以结合使用中值滤波和均值滤波,以达到更好的降噪效果。
首先使用中值滤波去除孤立噪声点,然后再使用均值滤波去除随机噪声,这样可以在保留图像细节的同时降低噪声干扰。
综上所述,中值滤波和均值滤波是两种常用的图像滤波算法,它们有各自的原理和优点。
根据实际需求,选择适当的滤波算法可以有效地去除图像中的噪声,提高图像质量。
中值滤波算法公式
中值滤波算法公式 中值滤波是一种常用的信号处理方法,用于去除图像或信号中的噪声。
它通过取邻域内像素的中值来替代当前像素的值,从而平滑图像或信号。
中值滤波算法的基本思想是将邻域内的像素值进行排序,然后取中间值作为当前像素的新值。
该算法的主要步骤如下: 1. 定义邻域大小:选择一个合适的邻域大小,通常是一个正方形区域。
这个区域可以是3x3、5x5乃至更大的尺寸。
2. 定位邻域:在图像中,以当前像素为中心,定位邻域大小。
3. 提取邻域像素值:根据邻域的位置,提取出所有邻域内的像素值。
4. 排序邻域像素值:对提取出的邻域像素值进行排序,从小到大排列。
5. 计算中值:取排序后的邻域像素值的中间值作为当前像素的新值。
6. 更新图像:将当前像素的新值更新到原始图像中。
7. 遍历整个图像:对所有像素都按照以上步骤处理,得到滤波后的图像。
中值滤波算法的优点在于可以有效地去除图像或信号中的椒盐噪声、斑点噪声等,同时保持图像或信号的边缘信息不被模糊化。
由于使用了中值,该算法对于异常值也具有一定的抗干扰能力。
然而,中值滤波也存在一些缺点。
首先,它无法处理大面积的噪声,因为中值滤波只能对某一个像素点进行处理。
其次,在处理图像边缘区域时,由于邻域的大小限制,可能导致边缘附近的像素值被错误地替换。
中值滤波算法在图像处理领域广泛应用。
例如,在数字图像传输过程中,由于传输或存储过程中的噪声干扰,图像容易出现噪点,这时可以利用中值滤波算法来降低噪声的影响。
另外,在数字摄影中,拍摄照片时可能会产生图像噪声,通过中值滤波可以有效去除这些噪声。
总之,中值滤波算法是一种简单而有效的信号处理方法。
通过取邻域内像素的中值来替代当前像素的值,可以去除图像或信号中的噪声。
尽管算法存在一些限制,但在很多实际应用中,中值滤波算法仍然是一种非常有用的工具。
中值滤波计算例题
中值滤波计算例题中值滤波是一种常用的数字图像处理算法,主要用于平滑图像、去除噪声等。
下面是中值滤波计算例题:假设有一个灰度图像,大小为 $m times n$,其中每个像素点由灰度值 $i$ 和 $j$ 两个维度组成。
我们需要对图像进行中值滤波,使得滤波后的图像看起来更加平滑。
首先,我们需要计算出每个像素点周围的像素值。
对于每个像素点 $(i,j)$,我们需要计算其周围 $k$ 个像素点的数值,其中$k$ 通常为 3 或 5。
这些像素点的数值包括$(i-k,j-k)$,$(i-k,j+k)$,$(i+k,j-k)$,$(i+k,j+k)$ 四个像素点的数值。
接下来,我们需要计算每个像素点周围的像素点的中值。
具体来说,我们计算每个像素点周围的 $k$ 个像素点的灰度值的平均值,然后将这个平均值作为该像素点的新的灰度值。
最后,我们需要对滤波后的图像进行剪裁,即将图像缩小到原始图像的大小或者缩小为 $m times n$ 的大小。
下面是代码实现:```pythonimport cv2import numpy as np# 加载图像img = cv2.imread("image.png")# 计算周围像素点的灰度值gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 计算周围像素点的中值mean = np.mean(gray)# 剪裁图像new_img = cv2.resize(img, (0, 0), fx=0.5, fy=0.5)# 显示图像cv2.imshow("Original Image", img)cv2.imshow("Filtered Image", new_img)cv2.waitKey(0)cv2.destroyAllWindows()```上述代码实现了对图像进行中值滤波的操作,并且将滤波后的图像显示在屏幕上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
南昌大学实验报告学生姓名:洪僡婕学号:6100411159 专业班级:数媒111班实验类型:■验证□综合□设计□创新实验日期: 4.29 实验成绩:一、实验项目名称数字图像处理二、实验目的实现快速中值滤波算法三、实验内容用VC++实现中值滤波的快速算法四、主要仪器设备及耗材PC机一台五、实验步骤// ImageProcessingDoc.cpp : implementation of the CImageProcessingDoc class// #include "stdafx.h"#include "ImageProcessing.h"#include "ImageProcessingDoc.h"#include "GreyRatio.h"#include <math.h>#define PI (acos(0.0) * 2)#ifdef _DEBUG#define new DEBUG_NEW#undef THIS_FILEstatic char THIS_FILE[] = __FILE__;#endif///////////////////////////////////////////////////////////////////////////// // CImageProcessingDocIMPLEMENT_DYNCREATE(CImageProcessingDoc, CDocument)BEGIN_MESSAGE_MAP(CImageProcessingDoc, CDocument)//{{AFX_MSG_MAP(CImageProcessingDoc)ON_COMMAND(ID_HISTOGRAM_ADJUSTIFCATION, OnHistogramAdjustifcation)ON_COMMAND(ID_FFT, OnFft)ON_COMMAND(ID_SALT_PEPPER_NOICE, OnSaltPepperNoice)ON_COMMAND(ID_RANDOM_NOISE, OnRandomNoise)ON_COMMAND(ID_MEDIAN_FILTERING, OnMedianFiltering)ON_COMMAND(ID_DCT, OnDct)ON_COMMAND(ID_FWT, OnFwt)ON_COMMAND(ID_DHT, OnDht)ON_COMMAND(ID_WAVELET_TRANSFORM, OnWaveletTransform)ON_COMMAND(ID_GREY_ADJUSTIFCATION, OnGreyAdjustifcation)ON_COMMAND(ID_GREY_LINEAR_ADJUSTIFCATION, OnGreyLinearAdjustifcation)ON_COMMAND(ID_GREY_SEGLINEAR_ADJUSTIFCATION, OnGreySeglinearAdjustifcation) ON_COMMAND(ID_2DGRAD, On2dgrad)ON_COMMAND(ID_ROBERT, OnRobert)//}}AFX_MSG_MAPEND_MESSAGE_MAP()///////////////////////////////////////////////////////////////////////////// // CImageProcessingDoc construction/destructionCImageProcessingDoc::CImageProcessingDoc(){// TODO: add one-time construction code heremImageFile = NULL;bFileIsLoad = FALSE;nRows = 256;nCols = 256;mSourceData = NULL;pSourceData = NULL;bDataIsProcessed = FALSE;mResultData = FALSE;pResultData = FALSE;FourierDataR = NULL;FourierDataI = NULL;}CImageProcessingDoc::~CImageProcessingDoc(){}BOOL CImageProcessingDoc::OnNewDocument(){if (!CDocument::OnNewDocument())return FALSE;// TODO: add reinitialization code here// (SDI documents will reuse this document)return TRUE;}///////////////////////////////////////////////////////////////////////////// // CImageProcessingDoc serializationvoid CImageProcessingDoc::Serialize(CArchive& ar) {if (ar.IsStoring()) {// TODO: add storing code here}else{// TODO: add loading code here}}///////////////////////////////////////////////////////////////////////////// // CImageProcessingDoc diagnostics#ifdef _DEBUGvoid CImageProcessingDoc::AssertValid() const{CDocument::AssertValid();}void CImageProcessingDoc::Dump(CDumpContext& dc) const{CDocument::Dump(dc);}#endif //_DEBUG///////////////////////////////////////////////////////////////////////////// // CImageProcessingDoc commandsBOOL CImageProcessingDoc::OnOpenDocument(LPCTSTR lpszPathName) { int x;int y;if (!CDocument::OnOpenDocument(lpszPathName))return FALSE;// TODO: Add your specialized creation code hereif(mSourceData) {free(mSourceData);mSourceData = NULL;}if (!(mSourceData = (unsigned char *)malloc(nRows*nCols*sizeof(unsigned char))))return FALSE;if (pSourceData) {free(pSourceData);pSourceData = NULL;}if (!(pSourceData = (unsigned char *)malloc(3*nRows*nCols*sizeof(unsigned char))))return FALSE;if (mResultData) {free(mResultData);mResultData = NULL;}if (!(mResultData = (unsigned char *)malloc(nRows*nCols*sizeof(unsigned char))))return FALSE;if (pResultData) {free(pResultData);pResultData = NULL;}if (!(pResultData = (unsigned char *)malloc(3*nRows*nCols*sizeof(unsignedchar))))return FALSE;if (mImageFile) {fclose(mImageFile);mImageFile = NULL;}if (!(mImageFile = fopen(lpszPathName,"rb"))){free(mSourceData);return FALSE;}if (fread(mSourceData,sizeof(unsigned char),nRows*nCols,mImageFile) != (unsigned)nCols*nRows) {free(mSourceData);fclose(mImageFile);mImageFile = NULL;bFileIsLoad = false;return FALSE;}for(y = 0; y < nRows; y++){for(x = 0; x < nCols; x++){pSourceData[3*y*nCols+3*x] = mSourceData[y*nCols+x];pSourceData[3*y*nCols+3*x+1] = mSourceData[y*nCols+x];pSourceData[3*y*nCols+3*x+2] = mSourceData[y*nCols+x];}bFileIsLoad = TRUE;return TRUE;}void CImageProcessingDoc::OnHistogramAdjustifcation(){// TODO: Add your command handler code hereint x,y;double *mR;double *mS;mR = new double[256];mS = new double[256];for(x=0;x<256;x++){mR[x] = mS[x] = 0.0;}//统计直方图for(y = 0; y < nRows; y++){for(x = 0; x < nCols; x++){mR[mSourceData[y*nCols+x]] ++;}for(x=0;x<256;x++){for(y=0;y<x;y++)mS[x] += mR[y];mS[x] /= nRows*nCols;}//直方图变换for(y = 0; y < nRows; y++)for(x = 0; x < nCols; x++)mResultData[y*nRows+x] = (char) (255* mS[mSourceData[y*nRows+x]]);//灰度计算for(y = 0; y < nRows; y++){for(x = 0; x < nCols; x++){pResultData[3*y*nCols+3*x] = mResultData[y*nCols+x];pResultData[3*y*nCols+3*x+1] = mResultData[y*nCols+x];pResultData[3*y*nCols+3*x+2] = mResultData[y*nCols+x];}//更新显示UpdateAllViews(NULL);}// FFTandIFFT 一维傅立叶变换与逆变换函数// 输入时域数据实部Tr,虚部Ti// 输出频域数据实部Tr,虚部Ti// 序列长度N,N等于2的r次幂// FFTorIFFT,逻辑变量,非零做正变换,零做反变换void CImageProcessingDoc::FFTandIFFT(float *Tr, float *Ti, int N, bool FFTorIFFT) {int r; //迭代次数int l,j,k;//循环变量int p; //用于蝶形计算加权系数的指数int B; //对偶结点距离float X,Y,XX,YY;float w;float cosw,sinw;if (!FFTorIFFT) { //如果做傅立叶逆变换,则必须对数列除以Nfor(l=0;l<N;l++){Tr[l] /= N;Ti[l] /= N;}}//计算循环次数rr = 0; l = N;while(l /= 2) r++;//倒序int LH = N/2;int i;float temp;j = 0;for (i=1;i<N-1;i++){k = LH;while(j>=k) {j = j-k;k = k/2;}j = j + k;if (i<=j) {temp = Tr[i]; Tr[i] = Tr[j]; Tr[j] = temp;temp = Ti[i]; Ti[i] = Ti[j]; Ti[j] = temp;}}for(l=0; l <= r; l++) //共r级{B = 1<<(l-1); // 第l层对偶结点距离为2^(l-1)for(j=0; j < B;j++){p = j*(1<<(r-l));w = 2*PI*p/N;for(k=j;k<N-1;k+=(1<<l)) {if (FFTorIFFT) { //若做傅立叶正变换cosw =cos(-w);sinw =sin(-w);}else{ //傅立叶反变换cosw =cos(w);sinw =sin(w);}X = Tr[k] + Tr[k+B]*cosw - Ti[k+B] * sinw;Y = Ti[k] + Tr[k+B]*sinw + Ti[k+B] * cosw; XX = Tr[k] - Tr[k+B]*cosw + Ti[k+B] * sinw;YY = Ti[k] - Tr[k+B]*sinw - Ti[k+B] * cosw;Tr[k] = X;Ti[k] = Y;Tr[k+B] = XX;Ti[k+B] = YY;}}}}void CImageProcessingDoc::OnFft(){// TODO: Add your command handler code hereint i,j;int ii,jj;float temp;float *Tr;float *Ti;Tr = new float[nCols];Ti = new float[nCols];if ( FourierDataR) {delete FourierDataR;FourierDataR = NULL;}if ( FourierDataI) {delete FourierDataI;FourierDataR = NULL;}FourierDataR = new float[nRows*nCols];FourierDataI = new float[nRows*nCols];for(i=0;i<nRows;i++){for(j=0;j<nCols;j++){ //图像数据先给傅立叶变换数组FourierDataR[i*nCols+j] = (float) mSourceData[i*nCols+j];FourierDataI[i*nCols+j] = 0.0;}for (i=0;i<nRows;i++){ //每行进行傅立叶变换for (j=0;j<nCols;j++){Tr[j] = FourierDataR[i*nCols + j];Ti[j] = FourierDataI[i*nCols + j];}FFTandIFFT(Tr,Ti,nCols,1);for (j=0;j<nCols;j++){FourierDataR[i*nCols + j] = Tr[j];FourierDataI[i*nCols + j] = Ti[j];}}delete Tr;delete Ti;Tr = new float[nRows];Ti = new float[nRows];for(j=0;j<nCols;j++){ //每列进行傅立叶变换for (i=0;i<nRows;i++){Tr[i] = FourierDataR[i*nCols + j];Ti[i] = FourierDataI[i*nCols + j];}FFTandIFFT(Tr,Ti,nRows,1);for (i=0;i<nRows;i++){FourierDataR[i*nCols + j] = Tr[i];FourierDataI[i*nCols + j] = Ti[i];}}for (i=0;i<nRows;i++){for (j=0;j<nCols;j++){temp = sqrt(FourierDataR [i*nCols+j]*FourierDataR [i*nCols+j] +FourierDataI [i*nCols+j]*FourierDataI[i*nCols+j] );temp /= 100;if(temp > 255.0)temp = 255.0;ii = nRows - 1 - (i<nRows/2?i+nRows/2:i-nRows/2);jj = (j<nCols/2)?(j+nCols/2):(j-nCols/2);//将变换后现实的原点调整在中心位置pResultData[3*ii*nCols+3*jj] = (int) temp;pResultData[3*ii*nCols+3*jj+1] = (int) temp;pResultData[3*ii*nCols+3*jj+2] = (int) temp;}//更新显示UpdateAllViews(NULL);delete FourierDataR;delete FourierDataI;FourierDataI = NULL;FourierDataR = NULL;return;}void CImageProcessingDoc::OnSaltPepperNoice(){// TODO: Add your command handler code here// TODO: Add your command handler code hereint x;int y;Salt_Pepper_Noise(mSourceData,nCols,nRows);for(y = 0; y < nRows; y++){for(x = 0; x < nCols; x++){pSourceData[3*y*nCols+3*x] = (unsigned char) mSourceData[y*nCols+x];pSourceData[3*y*nCols+3*x+1] = (unsigned char) mSourceData[y*nCols+x];pSourceData[3*y*nCols+3*x+2] = (unsigned char) mSourceData[y*nCols+x];}UpdateAllViews(NULL);}void CImageProcessingDoc::OnRandomNoise(){// TODO: Add your command handler code hereint x;int y;Random_Noise(mSourceData,nRows,nCols);for(y = 0; y < nRows; y++){for(x = 0; x < nCols; x++){pSourceData[3*y*nCols+3*x] = (unsigned char)mSourceData[y*nCols+x];pSourceData[3*y*nCols+3*x+1] = (unsigned char)mSourceData[y*nCols+x];pSourceData[3*y*nCols+3*x+2] = (unsigned char)mSourceData[y*nCols+x];}UpdateAllViews(NULL);}void CImageProcessingDoc::Salt_Pepper_Noise(unsigned char *mdata, int nHeight, int nWidth) {unsigned char* lpSrc;//循环变量long i;long j;//生成伪随机种子srand((unsigned)time(NULL));//在图像中加噪for (j = 0;j < nHeight ;j++){for(i = 0;i < nWidth ;i++){if(rand()>31500) {// 指向源图像倒数第j行,第i个象素的指针lpSrc = (unsigned char *)&mdata[j*nWidth + i];//图像中当前点置为黑*lpSrc = 0;}}}// 返回return ;}void CImageProcessingDoc::Random_Noise(unsigned char *mdata, int nHeight, int nWidth) {// 指向源图像的指针unsigned char* lpSrc;//循环变量long i;long j;//像素值unsigned char pixel;//噪声BYTE NoisePoint;//生成伪随机种子srand((unsigned)time(NULL));//在图像中加噪for (j = 0;j < nHeight ;j++){for(i = 0;i < nWidth ;i++){NoisePoint=rand()/1024;// 指向源图像倒数第j行,第i个象素的指针lpSrc = (unsigned char *)&mdata[nWidth * j + i];//取得像素值pixel = (unsigned char)*lpSrc;*lpSrc = (unsigned char)(pixel*224/256 + NoisePoint);}}// 返回return ;}void CImageProcessingDoc::MedianFiltering(unsigned char *sourcedata, unsigned char *resultdata,int nHeight, int nWidth, int nR){int i,j,m,n,r;unsigned tmp;unsigned char* mdata = new unsigned char[(2*nR+1)*(2*nR+1)];for (i=0;i<nRows;i++)for (j=0;j<nCols;j++){if((i<nR) || (i>nHeight-nR-1) || (j<nR) || (j>nWidth-nR-1))resultdata[i*nWidth+j] = 0;else {for(m=-nR;m<=nR;m++)for(n=-nR;n<=nR;n++)mdata[(m+nR)*(2*nR+1)+n+nR] =sourcedata[(i+m)*nWidth+(j+n)]; //排序for(m=0;m<(2*nR+1)*(2*nR+1)-2;m++){r = 1;for (n=m+1;n<(2*nR+1)*(2*nR+1);n++){if (mdata[n]<mdata[n+1]){tmp = mdata[n];mdata[n]=mdata[n+1];mdata[n+1]=tmp;r=0;}}if (r)break;}mResultData[i*nWidth+j] = mdata[nR*(2*nR+1)+nR];}}}void CImageProcessingDoc::OnMedianFiltering() {// TODO: Add your command handler code hereint x;int y;MedianFiltering(mSourceData,mResultData,nRows,nCols,1);for(y = 0; y < nRows; y++){for(x = 0; x < nCols; x++){pResultData[3*y*nCols+3*x] = (unsigned char) mResultData[y*nCols+x];pResultData[3*y*nCols+3*x+1] = (unsigned char) mResultData[y*nCols+x];pResultData[3*y*nCols+3*x+2] = (unsigned char) mResultData[y*nCols+x];}UpdateAllViews(NULL);}void CImageProcessingDoc::OnDct() {// TODO: Add your command handler code here}void CImageProcessingDoc::OnFwt() {// TODO: Add your command handler code here}void CImageProcessingDoc::OnDht() {// TODO: Add your command handler code here}void CImageProcessingDoc::OnWaveletTransform() {// TODO: Add your command handler code here}void CImageProcessingDoc::OnGreyAdjustifcation() {// TODO: Add your command handler code here}void CImageProcessingDoc::OnGreyLinearAdjustifcation() {// TODO: Add your command handler code hereint x;int y;int tmp;CGreyRatio mdlg;mdlg.DoModal();for(y=0;y<nRows;y++)for(x=0;x<nCols;x++){tmp =(int)(mdlg.m_GreyRatio*mSourceData[y*nCols+x]);tmp = tmp>255?255:tmp;pResultData[3*y*nCols+3*x] = tmp;pResultData[3*y*nCols+3*x+1] = tmp;pResultData[3*y*nCols+3*x+2] = tmp;}UpdateAllViews(NULL);}void CImageProcessingDoc::OnGreySeglinearAdjustifcation() {// TODO: Add your command handler code here}void CImageProcessingDoc::On2dgrad() {// TODO: Add your command handler code hereint x;int y;int dx;int dy;int tmp;for(y=0;y<nRows-1;y++){for(x=0;x<nCols-1;x++){dx = mSourceData[y*nCols+x] - mSourceData[y*nCols+x+1];dy = mSourceData[y*nCols+x] - mSourceData[(y+1)*nCols+x];tmp = (int) sqrt(dx*dx+dy*dy);tmp = tmp>255?255:tmp;pResultData[3*y*nCols+3*x] = tmp;pResultData[3*y*nCols+3*x+1] = tmp;pResultData[3*y*nCols+3*x+2] = tmp;}UpdateAllViews(NULL);}void CImageProcessingDoc::OnRobert() {// TODO: Add your command handler code hereint x;int y;int dx;int dy;int tmp;for(y=0;y<nRows-1;y++){for(x=0;x<nCols-1;x++){dx = mSourceData[y*nCols+x] - mSourceData[(y+1)*nCols+x+1];dy = mSourceData[y*nCols+x+1] - mSourceData[(y+1)*nCols+x];tmp = (int) sqrt(dx*dx+dy*dy);tmp = tmp>255?255:tmp;pResultData[3*y*nCols+3*x] = tmp;pResultData[3*y*nCols+3*x+1] = tmp;pResultData[3*y*nCols+3*x+2] = tmp;}UpdateAllViews(NULL);}void CImageProcessingDoc::DCTandIDCT(float *Ff, int N, bool bDctIDct){ float *mR;float *mI;int i;float Ff0 = 0;mR = new float[N*2];mI = new float[N*2];if(bDctIDct){for(i=0;i<2*N;i++){if(i<N)mR[i] = Ff[i];else{mR[i] = 0;mI[i] = 0;}for(i=0;i<N;i++){Ff0 += Ff[i];Ff0 = Ff0/sqrt(N);FFTandIFFT(mR,mI,2*N,true)Ff[0] = Ff0;for(i=0;i<N;i++){Ff[i] = (mR[i]*cos(i*PI/(2*N)) + mI[i]*sin(i*PI/(2*N))) *sqrt(2.0/N);}else{for(i=0;i<2*N;i++){if(i<N){mR[i] = Ff[i]*cos(i*PI/(2*N));mI[i] = Ff[i]*sin(i*PI/(2*N));}else{mR[i] = 0;mI[i] = 0;}}for(i=0;i<N;i++){Ff0 += Ff[i];Ff0 = Ff0/sqrt(N);FFTandIFFT(mR,mI,2*N,false);for(i=0;i<N;i++){Ff[i] = 1/sqrt(N) - sqrt(2.0/N) + sqrt(2.0/N)*mR[i];}return;}六、实验数据七、思考及体会在设计算法编制程序的时候,我们充分考虑到程序运行的时间复杂度和空间复杂度问题,在解决问题的前提下,使算法尽量简单,使程序运行占有的空间尽量的小,这样来减少不必要的时问浪费和空间浪费,从而太大的提高程序执行的效率。