Sec16_模态中的粘接接触
粘弹性接触问题的数学规划解法

粘弹性接触问题的数学规划解法
李录贤
【期刊名称】《西北工业大学学报》
【年(卷),期】1998(016)001
【摘要】主要研究粘弹性笺体间的接触问题,同时考虑了刚体位移,摩擦及几何非线性等因素。
【总页数】5页(P109-113)
【作者】李录贤
【作者单位】西安交通大学
【正文语种】中文
【中图分类】O345
【相关文献】
1.弹性体接触问题的线性规划解法 [J], 唐有光
2.中考数学中“合理规划问题”的解法 [J], 简秀华
3.斜齿面齿轮齿面接触问题的有限元-线性规划解法 [J], 宋相男; 靳广虎
4.有限变形粘弹性接触的数学规划方法 [J], 李录贤;叶天麒
5.摩擦接触问题的数学规划解法 [J], 李录贤;沈亚鹏;叶天麒
因版权原因,仅展示原文概要,查看原文内容请购买。
角接触球轴承的接触特性分析
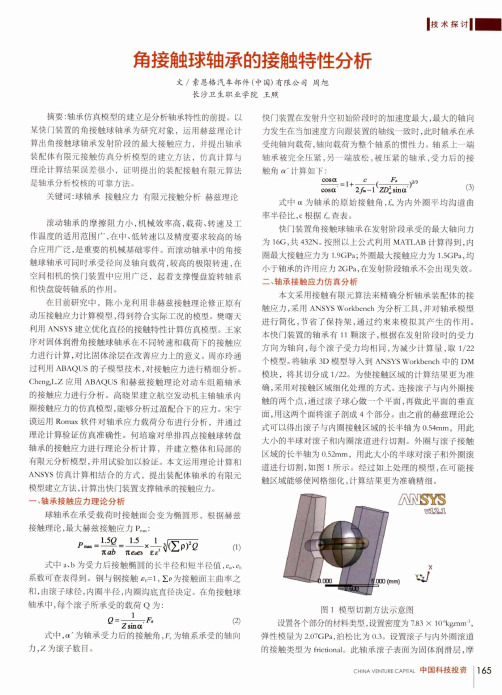
个模型。将轴承3D 模型导入到ANSYS Workbench中 的 DM
模 块 ,将 其 切 分 成 1/22。为使接触区域的计算结果更为准
确 ,采用对接触区域细化处理的方式。连接滚子与内外圈接
触的两个点,通过滚子球心做一个平面,再做此平面的垂直 面 ,用这两个面将滚子剖成4 个部分。由之前的赫兹理论公
作 者 简 介 :周 旭 0986—),男 ,湖 南 益 阳 ,硕 士 ,工 程 师 , 主要研究方向为机械设计。
图 3 外圈滚道应力云图 1 6 6 | 中 国 科 技 投 资 C H IN A VENTURE CAPITAL
在目前研究中,陈小龙利用非赫兹接触理论修正原有 动压接触应力计算模型,得到符合实际工况的模型。樊曙天 利用A N SYS建立优化直径的接触特性计算仿真模型。王家 序对固体润滑角接触球轴承在不同转速和载荷下的接触应 力进行计算,对比固体涂层在改善应力上的意义。周亦玲通 过 利 用 A B A Q U S 的子模型技术,对接触应力进行精细分析。 Chen& L .Z 应 用 A BAQ U S和赫兹接触理论对动车组箱轴承 的接触应力进行分析。高晓果建立航空发动机主轴轴承内 圈接触应力的仿真模型,能够分析过盈配合下的应力。宋宇 谟 运 用 Rom ax软件对轴承应力载荷分布进行分析,并通过 理论计算验证仿真准确性。何培瑜对单排四点接触球转盘 轴承的接触应力进行理论分析计算,并建立整体和局部的 有限元分析模型,并用试验加以验证。本文运用理论计算和 A N SYS仿真计算相结合的方式,提出装配体轴承的有限元 模型建立方法,计算出快门装置支撑轴承的接触应力。 _ 、轴 承 接 触 应 力 理 论 分 析
式可以得出滚子与内圈接触区域的长半轴为0.54mm, 用此
自动控制原理+第五版课后习题答案 胡寿松 免费在线阅读

2-20 与 2-18 同
C(S)二 G4 N(S)~1 + G2G4+G3G4
■ 2Ua) C⑻- GjG^+G^d + G,!!, ) 丄R(s) - 1 + G1H1+ G3H2 +G1G2G3H1H2 +G1HiG3H2 E(s)__(1 + G3H2)_G4G3H2H!_
R(s) ~ /+GZH; +G3H2
l)
s
3-11劳斯表变号两次, 有两个特征根在s右半平面, 系统不稳定。
3-12(1) 有一对纯虚根: s1>2 = ±j2 系统不稳定。 (2) s12=±jVI s34=±l s5 =1 s6 =-5 系统小稳定。 (3) 有一对纯虚根:sh2 =±j75系统不稳定。
3-13 0 < k < 1.7
s
6-3 取 k = 20 < = 8 gJ«)= 1^0 045 验算得: <=: 7.93,/ = 62.1°
36
(36-co2) + jl3
5-3 ess (t) = 0.632sm(t + 48.4°)- 0.79cos(2t 一 26.57°)
或: css(t) = 0.447sin(t + 3.4°)-0.707cos(2t一
90°) 5-4
0.653 wn =1.848
ess(t) = r(t) — css(t)
ch - ehgf+afch
C(s) _ bcde + ade + (a + bc)(l + eg) Rj (s) 1 + cf + eg + bcdeh + cefg + adeh
ANSYS-WORKBENCH提供的六种接触类型

ANSYS WORKBENCH提供的六种接触类型-----宋博士不少朋友提到了关于接触类型的问题,对于如何使用接触类型弄不清楚。
为了帮助刚入门的朋友们了解这些接触类型,笔者首先翻译了ANSYS 关于接触类型的帮助,然后对之进行点评。
翻译的部分帮助如下:ANSYS WORKBENCH提供了6种接触类型,这些接触类型大多只对面接触使适用。
(1)bonded.使用绑定以后,在接触面或者接触边之间不存在切向的相对滑动或者法向的相对分离。
这是缺省的接触类型,适用于所有的接触区域(实体接触,面接触,线接触)。
(2)no separation.这与绑定类似。
在接触面或者接触线之间不允许发生法向的相对分离,但是允许发生少量的切向无摩擦滑动。
(3)frictionless:用于模拟无摩擦的单边接触。
所谓单边接触,就是说,一旦两个物体之间出现了分离,则法向力就为零。
因此当外力发生改变时,接触面之间可能会分开,也可能会闭合。
这种情况下假设摩擦系数为零,即当发生切向相对滑动时,没有摩擦力。
(4)rough:与无摩擦接触类型相似。
它模拟非常粗糙的接触,保证两个物体之间只是发生静摩擦,而不会发生切向的滑移,从而不会产生滑动摩擦。
它相当于在两个物体之间施加了无限大的摩擦系数。
(5)frictional:有摩擦的接触。
这是最实际的情况,两个接触面之间既可以法向分离,也可以切向滑动。
当切向外力大于最大静摩擦力后,发生切向滑动。
一旦发生切向滑动后,会在接粗面之间出现滑动摩擦力,该滑动摩擦力要根据正压力和摩擦系数来计算。
此时需要用户输入摩擦系数。
(6)forced frictional sliding:该选项只对刚体动力学适用。
它与frictional类型类似,只是没有静摩擦阶段。
此时,系统会在每个接触点上施加一个切向的阻力。
该切向阻力正比于法向接触力。
到底使用哪种接触类型,取决于你需要解决的问题。
如果(1)需要模拟两个物体之间轻微的分离(2)要获得接接触面附近的应力,那么可以考虑下列三种接触类型:frictionless,rough和frictional.它们可以模拟间隙,并能更精确的建模真实的接触区域。
利用ANSYS软件分析滚动轴承接触问题_韦春翔
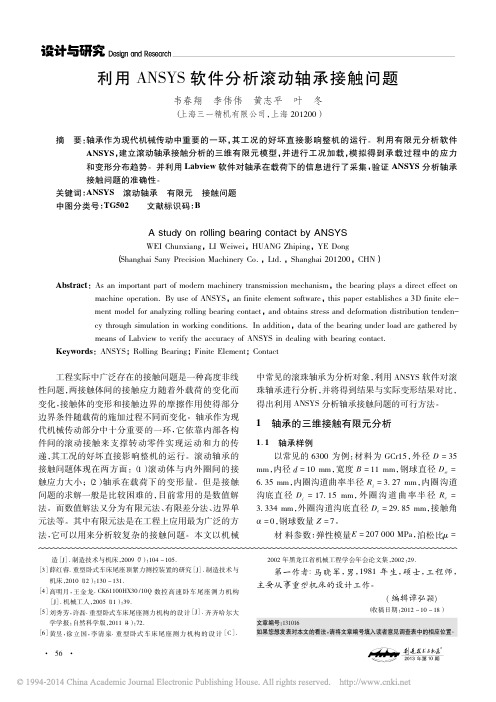
( 上海三一精机有限公司, 上海 201200 ) 摘 要: 轴承作为现代机械传动中重要的一环, 其工况的好坏直接影响整机的运行。 利用有限元分析软件 ANSYS, 建立滚动轴承接触分析的三维有限元模型 , 并进行工况加载, 模拟得到承载过程中的应力 和变形分布趋势。并利用 Labview 软件对轴承在载荷下的信息进行了采集 , 验证 ANSYS 分析轴承 接触问题的准确性。 关键词: ANSYS 滚动轴承 有限元 接触问题 文献标识码: B 中图分类号: TG502
施加在内部表面的轴向线的节点上 。 1. 6 有限元分析结果 ( 1 ) 显示结果 通过 ANSYS 后处理分析, 得到最大载荷作用下钢 球同内外圈的接触结果。 图 4 、 图 5 所示的分别是钢 球同内外圈的等效应力和模型的总变形 。模型的接触 应力如图 6 所示。 ( 2 ) 结果分析 从上面 ANSYS 进行有限元分析所得的结果可以 看出, 应力最大的地方发生在钢球与内圈接触处 , 这与 理论计算中预期的初始接触点一致 。从图 4 可以很清 楚地看出, 两个相同材料接触体内部的接触应力是不 同的, 外圈最大接触应力在与钢球接触的位置 , 最大应 力为 3 350. 8 MPa。而内圈最大应力发生在内圈滚道 边缘, 最大应力 P = 3 882. 6 MPa。 从图 5 得知, 内圈的接触变形为长轴 a = 1. 854 mm, 短轴 b = 0. 158 mm; 外圈的接触变形为 a = 1. 452 b = 0. 254 mm。 mm,
A study on rolling bearing contact by ANSYS
WEI Chunxiang,LI Weiwei,HUANG Zhiping,YE Dong ( Shanghai Sany Precision Machinery Co. ,Ltd. ,Shanghai 201200 ,CHN) Abstract: As an important part of modern machinery transmission mechanism,the bearing plays a direct effect on machine operation. By use of ANSYS,an finite element software,this paper establishes a 3D finite element model for analyzing rolling bearing contact,and obtains stress and deformation distribution tendency through simulation in working conditions. In addition,data of the bearing under load are gathered by means of Labview to verify the accuracy of ANSYS in dealing with bearing contact. Keywords: ANSYS; Rolling Bearing; Finite Element; Contact 工程实际中广泛存在的接触问题是一种高度非线 性问题, 两接触体间的接触应力随着外载荷的变化而 变化, 接触体的变形和接触边界的摩擦作用使得部分 边界条件随载荷的施加过程不同而变化 。轴承作为现 它依靠内部各构 代机械传动部分中十分重要的一环, 件间的滚动接触来支撑转动零件实现运动和力的传 递, 其工况的好坏直接影响整机的运行。 滚动轴承的 接触问题体现在两方面: ( 1 ) 滚动体与内外圈间的接 触应力大小; ( 2 ) 轴承在载荷下的变形量。 但是接触 问题的求解一般是比较困难的, 目前常用的是数值解 法。而数值解法又分为有限元法、 有限差分法、 边界单 元法等。其中有限元法是在工程上应用最为广泛的方 法, 它可以用来分析较复杂的接触问题。 本文以机械
ANSYS接触分析精华

FAQs on CONTACT – ANALYSISTerminology: STS– Surface to Surface Contact. NTS - Nodes to Surface Contact .NTN- Node to Node Contact. FKN or Kn - Normal Contact Stiffness.E - Young’s Modulus. ICONT- Initial Contact value. PMIN & PMAX- Minimum and Maximum initial Penetration range.PINB - Pinball region Radius. FTOLN - Penetration tolerance. Mu - Friction CoefficientFAQ# 1. On what factor can a contact analysis be judged as "OKAY"?Answer: Penetration In physical reality, penetration between 2 contacting bodies never occurs. This is a mathematical creation so as to activatea contact stiffness between two bodies. Keeping penetration to a minimumis a best way to simulate a contact analysis. For achieving this, the contact Stiffness may be specified as high as possible as long as a converged FE solution is possible.FAQ# 2. What affects the accuracy and convergence of a contact analysis?(FKN) Stiffness used for the Contact is a major factor affecting Convergence of Contact problems. Using higher values of Stiffness may diverge the solution. Its advised to start with a small enough value and get a converged solution. Re-solve with increased value of stiffness so long as the problem stops converging. Trial and Error + Experience will help you predict the Contact Stiffness needed to solve a Contact Analysis. Another recommended practice is to run the analysis with an initial small contact stiffness and then slowly increase the stiffness over a series of load steps. This will ramp the contact stiffness value from the initially considered Stiffness, thus improving convergence behavior. The results for the last load-step would have been analyzed with more stiffness and hence would be more accurate than previous results.FAQ# 3. What is Hertz Stiffness? How is it calculated?Hertz Stiffness provides an approximate value for the Penalty Stiffness value. Kh = L*E where, Kh --> Hertz Stiffness. L --> Size/edge length of the element at the contact surface E --> Young’s Mod of Contact Surface. For 2D models, the thickness of element is considered for L.FAQ# 4. Simulating contacts between 2 Rubber material bodies. How canI evaluate E for the rubber so that I can roughly estimate the contact Stiffness?Consider E for the rubber material portion as: E=6(a+b) where ‘a’ and‘b’are the first Two Mooney-Rivlin constants.FAQ# 5. While using NTN contact elements between two (3D) surfaces, is there any recommended practice for meshing at those two surfaces?Meshing between the two sides were varying along X. Surface 1 Y X finer coarser Surface 2 $ sign indicates the Node-To-Node Contact Element between the Nodes of Surface 1 and 2 respectively. If you observe the mesh variation along X direction, it has varied from Finer to coarser. In such situations, use of a uniform Kn value for all the N-T-N contact elements could lead to un-even contact pressures. It is advisable to specify different values of Kn. If this step was not taken care of, then the finely meshed portion will experience more stiffness compared to the coarsely meshed portion. To avoid these issues, its recommended practice to use the same edge length between the two surfaces 1 & 2.FAQ# 6 what are the guidelines to estimate FKN for a contact Analysis.FKN = 0.1 to 10 ---> Factor of E For contact between two slender bodies (thin / bending dominated structures) FKN = 0.01 to 1 ---> Factor of E Its always advised to start with a lower value of FKN and proceed later with higher values. The default setting in Ansys is1, irrespective of what kind of bodies is participating are getting in Contact.FAQ# 7. When two different materials (say Steel and Aluminum) are in Contact, which material's E should be considered for evaluating FKN?E of the softer material be always considered for estimating FKN. In this case prefer E of Aluminum.FAQ# 8. How to specify Sticking and sliding conditions for Contact between two bodies?'Mu' - Friction coefficient and TAUMAX are the two inputs user needs to specify .If Ft >= Mu*Fn where Fn --> Normal Force & Ft --> Tangential Force, the bodies slide relative to each other and the two contacting bodies experience a Shear force of TAUMAX.Sticking happens when Ft < Mu*Fn.FAQ# 9. How to estimate TAUMAX?TAUMAX = (Von Mises Yield Stress/1.732) this is an empirical formula.FAQ# 10. I have higher order elements (with mid-side nodes) on the two contacting surfaces & I want to analyze the problem using NTN Contact. Can I create NTN Contact between the Mid-side Nodes?Kinematically consistent reaction forces at the nodes of midside-noded elements, NTN contact should NOT be applied to mid-side nodes. In effect, usage of NTN implies that only lower order elements be used for underlying mesh of contacting parts.FAQ# 11. While editing the real constants of a Contact element, like FKN can -ve values be entered?Answer: In the Real Constant menu, a negative value indicates an absolute value; and a positive is considered as a factor. So if FKN was specified as 0.1, its considered as 0.1*E Else, if FKN was specified as -2e10 then the value of FKN for the analysis is -2e10.FAQ# 12. How does FTOLN affect convergence & Accuracy of results?After FKN, FTOLN is the next parameter that affects both convergence & accuracy. It’s usually known as Penetration Tolerance (TOLN) this is a factor of the depth of the underlying element. If the underlying elements depth was [h], and if FTOLN is specified as 0.1 (default value), a penetration of (0.1*h) is allowed. If this value was exceeded during the solution, then solution does not converge. It’s aborted. In effect, this value can be treated as the Maximum allowable penetration. Setting too small a value can also affect in the form of excessive iterations or non-convergence.FAQ# 13. How and where is contact detected?For STS elements, only the Target elements can penetrate into the Contact Elements and NOT vice-versa. Gauss-Integration points on the Contact Surface act as the Contact detection points. This is the default setting and is recommended for most cases. The Newton-Cotes/Lobatto nodal integration scheme uses the Nodes of the Contact elements as Contact Detection points.FAQ# 14. There are several Contact Surface behaviors options on the Contact Wizard. What does each one of them do/describe?STANDARD: Normal contact closing and opening behavior, with normal sticking/sliding friction behavior.ROUGH: Normal contact closing and opening behavior, but no sliding canoccur. The surfaces are assumed to be so rough that there is infinite Friction and there can be no relative Sliding.BONDED: Target and contact surfaces are assumed to get GLUED once contact is established.BONDED CONTACT (always): Any contact detection points initially inside the pinball region or that come into contact are bonded for the remainder of the analysis. This contact typically can be used to "ADD" two meshes in an Assembly analysis where two parts have different meshes. A linear Static analysis can also be solved with this contact. Though ansys would prompt for nonlinear analysis (due to presence of contact elements) a single iteration is enoughBONDED CONTACT(initial contact): Bonds surfaces only in initial contact, initially open surfaces will remain open.NO SEPERATION: Target and contact surfaces are tied once contact is established (sliding is permitted).NO SEPERATION(always): Any contact detection points initially inside the pinball region or that come into contact are tied in the normal direction (sliding is permitted).FAQ# 15. How should I simulate interference? Between two parts there exists both Interference as well as Gap between their surfaces? Using STS Contact element, what Factors need to be adjusted/set?The FE models, the exact interference cannot be modeled with all that accuracy. Hence there exists a parameter called CNOF, which can be tweaked, either to set a interference or a Gap. A positive value of CNOF is considered as INTERFERENCE, while a negative value of CNOF is considered as GAP. Using CNOF will either move the Contact Surface inwards/outwards for the analysis? The Target surface will not be moved. So, if you are modeling contact between two flexible bodies. please note that the surface designated as Target will not be offset. If the model contains initial geometric penetration+CNOF, it is recommended to set the initial interference option to "include with ramped effects". If this setting was not set, there is every chance that due to initial penetrations, the contact forces will be stepped (not ramped) to a huge value and there is every possibility for an un-converged solution. If both GAP and Interference exists in the model, different CNOF values will have to be specified between the various surfaces of the Parts.FAQ# 16. RIGID body motion error. I have the FE model with well-defined constraints. Yet I see this error in the very beginning of the Solution. How can I avoid this error?A rigid body motion can occur just before contact is established betweentwo parts. You may use a displacement so as to initiate contact in thefirst load step-In the second load step delete this displacement, andapply the reaction force obtained from previous load step. This willswitch your problem from displacement-controlled problem to aforce-controlled problem. In the subsequent load step (3) continue withthe load history. Weak springs that are connected to Ground can be usedto control rigid body motions. The spring stiffness should be very smallcompared to the stiffness of the system. Though, the spring may deform...its of no concern. The above two techniques involve some experimentationfrom the user. Also, they cannot be used in all kinds of problems. Theyare restricted. Ansys provides 3 parameters to control RIGID BODY MOTION1.ICONT2. PMIN-PMAX and3. CNOF.ICONT:This is a real-constant value, which specified a zone/band aroundthe surface of Target Elements. Any contact points lying within this Zone,are shifted to the target surface. Ansys uses a small default value ofICONT if not specified by the user. ThisValue should not be set to ZERO. If set to Zero, Ansys uses a default value.To turn it OFF specify a very small value lie 1e-20. If there is a Gapof say 0.25mm between the Target and the contact surface & this happensto be the first place where contact happens, then specify ICONT as 10%more than this Gap. ICONT = 0.275mm Please note that ICONT is not anyfactor, its a constant value unlike other parametersPMIN-PMAX:Use real constants PMIN and PMAX to specify an initialallowable penetration range. The Target surface shall be moved into theContact Surface and made to lie within PMIN-PMAX. This is achieved witha few interactions before the load history comes into effect. By usingthis feature, the gaps lying between Contact and Target Surfaces will beconverted into a initial closed contact. If any of the nodes on the Targetsurface had constraints, then that particular node will not be moved inthe constrained direction.CNOF: see the previous FAQ.FAQ# 17. In a Flexible-Flexible body contact, Why should the surface withfiner Mesh be Designated as Contact Surface, and the other surface (withcoarse mesh) be designated as Target?The Finer mesh will have more contact detection points. This will helpthe analysis solve better. Please note that elements/nodes on Targetsurface do not detect contact. In a flexible-flexible body contact, thechoice of the target and contact surface can cause a different amount ofpenetration and thus affect the solution accuracy. Choose that surfacewhich tends to move towards the other as the Contact Surface. (Assumingthat both surfaces have same mesh density & have relatively small difference in their structural stiffness)FAQ# 18. Guidelines to choose Target/Contact Surface1. If a convex surface comes into contact with a flat or concave surface, the flat or concave surface should be the target surface.2. If one surface has a coarse mesh and the other a fine mesh, the surface with the coarse mesh should be the target surface.3. If one surface is stiffer than the other, the stiffer surface should be the target surface.4. If one surface is higher order and the other is lower order, the lower order surfaceShould be the target surface.5. If one surface is larger than the other, the larger surface should be the target surfaceFAQ# 19. What is Pinball Region? What does it affect? What is its purpose in Contact Analysis?Pinball region (PIN affects the contact status determination. This Pinball Region is a circle (2D) or sphere(3D) around the Contact element. This Region helps figure out how "far" and "near" regions around the Contact element. If l ==> depth of underlying element, in Rigid-to-Flex Contact, the Pinball region is 4*l. For flex-flex contact, the Pinball Region is 2*l. The position and motion of a contact element relative to its associated target surface determines the contact element status. ANSYS monitors each contact element and assigns a status: STAT = 0 Open far-field contact STAT = 1 Open near-field contact STAT = 2 Sliding contact STAT = 3 Sticking contact A contact element is considered to be in near-field contact when its contact element enters a pinball region, which is centered on the integration point of the contact element.FAQ# 20. What type of Contact is best suited to simulate Interference fit kind of Problems.NTN type of Contact is best suited to simulate Interference Fit kind of problems. Most interference problems have negligible relative sliding deformation. NTN Contact is the least expensive in terms of solution times when compared to STS and NTS type of contact. Also, convergence issues are lesser.FAQ# 21. For NTN elements, how should the axis of NTN element be oriented? (I-J Orientation of element)Typically the I-J direction should be perpendicular to the contact surfaces. If the angles are not perpendicular undesired tangential responses would be generated between the Contact surfaces.1 关于接触定义中soft选项的使用dyna的接触定义的可选卡片A中有个soft选项,有0、1、2三个选项,很多人对该选项的使用不清楚,下面就把有关此选项的设置加以解释。
Abaqus选项内容讲解解析

总规则1、关键字必须以*号开头,且关键字前无空格2、**为注释行,它可以出现在文件中的任何地方3、当关键字后带有参数时,关键词后必须采用逗号隔开4、参数间都采用逗号隔开5、关键词可以采用简写的方式,只要程序能识别就可以了6、不需使用隔行符,如果参数比较多,一行放不下,可以另起一行,只要在上一行的末尾加逗号便可以*AMPLITUDE:定义幅值曲线amplitude这个选项允许任意的载荷、位移和其它指定变量的数值在一个分析步中随时间的变化(或者在ABAQUS/Standard分析中随着频率的变化)。
必需的参数:NAME:设置幅值曲线的名字可选参数:DEFINITION:设置definition=Tabular(默认)给出表格形式的幅值-时间(或幅值-频率)定义。
设置DEFINITION=EQUALL Y SPACED/PERIODIC/MODULATED/DECAY/SMOOTH STEP/SOLUTION DEPENDENT或BUBBLE来定义其他形式的幅值曲线。
INPUT:设置该参数等于替换输入文件名字。
TIME:设置TIME=STEP TIME(默认)则表示分析步时间或频率。
TIME=TOTAL TIME表示总时间。
V ALUE:设置V ALUE=RELATIVE(默认),定义相对幅值。
V ALUE=ABSOLUTE表示绝对幅值,此时,数据行中载荷选项内的值将被省略,而且当温度是指定给已定义了温度TEMPERA TURE=GRADIENTS(默认)梁上或壳单元上的节点,不能使用ABSOLUTE。
对于DEFINITION=TABULAR的可选参数:SMOOTH:设置该参数等于DEFINITION=TABULAR的数据行第一行1、时间或频率2、第一点的幅值(绝对或相对)3、时间或频率4、第二点的幅值(绝对或相对) 等等基本形式:*Amplitude,name=Amp-10.,0.,0.2,1.5,0.4,2.,1.,1.*BEAM SECTION:当需要数值积分时定义梁截面beamsection*BOND:定义绑定和绑定属性*BOUNDARY:定义边界条件用来在节点定义边界条件或在子模型分析中指定被驱动的节点。
模态分析(装配体)

模态分析(装配体)模态分析模态分析可以预见共振和因结构振动产生的位移. 通过分析, 可以确定动力特性,如自然频率和模态形状.重要术语自然频率和周期• 自然频率: 在单位时间内的结构振动时间(来回移动) (Hz)• 自然周期: 频率倒数(1/f), 它指的是振动1周的时间(sec)• 自然模态形状: 外力移动后的振动形状. 最低模态代表最容易变形形状.• 当应用于结构的振动频率与自然频率接近会出现共振.A. B.• A 和B 是不同的, 因此他们频率和周期是不同.• 频率和周期因长度不同而不同.• 每秒移动的周期数称为自然频率, 完成1周需要的时间称为自然周期.• 结构自然频率与刚度成正比,而与质量成反比. 如果集中质量远离结构边界,由于惯性效果致共振频率降低.<不同摆幅的摆锤>自由振动• 无外力作用下, 结构因惯性而产生振动, 阻尼抵抗恢复力. 因此,结构自由振动不受外力影响.• 尽管结构不受载荷影响, 自由振动因非零初始条件而发生.静平衡初始条件自由振动初始位置: A自由振动时间周期: T模态分析选项•模态数量:输入需要计算的自然频率数量.•最低/最高:设置频率范围.仅计算该范围内的频率.•Sturm 序列检查:通过迭代过程计算丢失特征值.模态分析-单位: N, mm-几何模型: Modal.x_t材料-Cast Alloy Steel (DB 사용)边界条件和载荷-固定约束(洞内部)确认结果-特征值-模态现象-模态分析结果和表格模态分析概述分析概述模型 约束条件(固定约束) 有限元模型(四面体网格)固定约束Step 操作步骤1.点击[ ] (新建)2. 选择[3D]3. 选择[N-mm-kg-sec-J] 单位系4. 点击[确认]5. 在窗口右击鼠标选择隐藏全部导向分析>> 设置分析条件0112345Step 1.选择模型: Modal.x_t 2. 勾选[选择接触面]3. 点击[打开]形状>> CAD 文件>> 导入02操作步骤123操作步骤1.创建>> 点击各向同性2. 选择材料DB库中的Steel3. 选择Cast Alloy Steel4. 点击[确认]5. 点击[关闭]213541.创建>> 点击3D2. 选择[实体]3. 输入特性4. 点击[确认]5. 点击[关闭]操作步骤号1名称Solid 材料2:Cast Alloy Steel123345Step 1.输入约束条件2. 点击[确认]静态/热分析>> 边界条件>> 约束05操作步骤4名称Fix 对象类型面选择目标4个条件固定约束11112Step1.选择[自动-实体]2.点击[ ] (全选)3. 网格大小: 使用基本设定值4. 点击[确认]06操作步骤网格>> 生成>> 3D2134Step 1.设置分析工况2. 选择[确认]分析与结果>> 分析工况>> 一般07操作步骤名称Modal 分析类型模态分析12Step 1.点击[确认]2. 另存为: 输入“Modal”3. 点击[保存(S)]分析与结果>> 分析>> 执行08操作步骤1321.点击[ ] (轴测图2)2. 选择分析与结果>> 一般>> 变形形状>> 变形+未变形(线框)3. 双击分析与结果工作目录树中的总位移操作步骤1223操作步骤1.双击分析与结果工作目录树中的特征值分析结果表格。
关于接触刚度的讨论
关于接触刚度的讨论()2008-09-11 10:11阅读65 评论0字号:大中小BBS 锦城驿站我最近在做接触分析,老觉得不合理。
接触刚度应该是与接触面等材料属性有关,为什么还要自己定义这个刚度?我仿照《使用ANSYS6。
1进行结构力学分析》里面的接触例子,求解时出现real constant2 ha s been referenced by element types element types1 and 2 one of which is contact element.书上说的是通过共享实常数来判别接触对,为什么又出现这样的错误提示呢?请大家帮忙。
决定接触刚度所有的接触问题都需要定义接触刚度,两个表面之间渗量的大小取决了接触刚度,过大的接触刚度可能会引起总刚矩阵的病态,而造成收敛困难,一般来谘,应该选取足够大的接触刚度以保证接触渗透小到可以接受,但同时又应该让接触刚度足够小以使不会引起总刚矩阵的病态问题而保证收敛性。
程序会根据变形体单元的材料特性来估计一个缺省的接触刚度值,你能够用实常数FKN来为接触刚度指定一个比例因子或指定一个真正的值,比例因子一般在0.01和10之间,当避免过多的迭代次数时,应该尽量使渗透到达极小值。
为了取得一个较好的接触刚度值,又可需要一些经验,你可以按下面的步骤过行。
1、开始时取一个较低的值,低估些值要比高估些值好因为由一个较低的接触刚度导致的渗透问题要比过高的接触刚度导致的收敛性困难,要容易解决。
2、对前几个子步进行计算3、检查渗透量和每一子步中的平衡迭代次数,如果总体收敛困难是由过大的渗透引起的(而不是由不平衡力和位移增量引起的),那么可能低估了FKN的值或者是将FTOLN的值取得大小,如果总体的收敛困难是由于不平衡力和位移增量达到收敛值需要过多的迭代次数,而不是由于过大的渗透量,那么FKN的值可能被高估。
4、按需要调查FKN或FTOLN的值,重新分析。
(ANSYS公司的资料)我的理解:接触刚度与接触面等材料属性无关,理论上接触刚度越大越好,尽量小的接触渗透。
ansys接触原则

ansys接触原则:
ANSYS的接触原则主要包括以下几个方面:
1.接触类型选择:ANSYS提供了多种接触类型,如绑定(Bonded)、不分离(No
Separation)、无摩擦(Frictionless)和无穷粗糙(Rough)等。
选择合适的接触类型对于模拟结果的准确性和收敛性至关重要。
2.接触面和目标面选择:在定义接触时,需要选择接触面和目标面。
通常,接触面是
指与目标面接触的表面,而目标面则是与接触面相互作用的面。
确保选择的接触面和目标面匹配是获得准确结果的重要步骤。
3.接触刚度和阻尼:在ANSYS中,可以通过设置接触刚度和阻尼来模拟接触行为。
接
触刚度决定了接触面的刚性,而阻尼则用于控制能量的吸收和耗散。
选择合适的刚度和阻尼参数对于获得准确的模拟结果至关重要。
4.接触算法选择:ANSYS提供了多种接触算法,如罚函数法、拉格朗日乘子法和增广
拉格朗日法等。
选择合适的算法对于确保模拟结果的准确性和收敛性至关重要。
5.初始条件和边界条件:在定义接触时,需要考虑初始条件和边界条件。
初始条件是
指接触状态在开始时的状态,而边界条件则用于限制模拟的边界条件。
确保初始条件和边界条件的正确设置对于获得准确的模拟结果至关重要。
workbench中轴相对于孔转动的接触方式

在Workbench中,轴相对于孔转动的接触方式主要涉及到模型中的相互作用(Interaction)和接触(Contact)设置。
这种接触方式通常用于模拟机械系统中轴和孔之间的转动。
以下是对这种接触方式的简要说明:1. 接触类型:在Workbench的模型中,首先需要确定接触类型。
轴和孔之间的接触通常属于面-面接触(Surface-Surface Contact)。
2. 摩擦模型:为了更准确地模拟转动过程中的摩擦力,可以选择适当的摩擦模型。
常见的摩擦模型包括库伦(Coulomb)摩擦、Brinell(巴氏)摩擦和肖氏(Shore)摩擦等。
根据实际情况选择适当的摩擦模型可以更真实地反映转动过程中的摩擦情况。
3. 接触对:在设置接触对时,需要指定轴和孔的几何形状以及对应的面。
轴和孔通常通过一个面-面接触对进行模拟。
4. 法向刚度:法向刚度(Normal Stiffness)用于控制接触面之间的法向刚性。
数值越大,接触面之间的法向刚性越大,模拟结果可能偏离实际情况。
因此,需要根据实际情况选择适当的法向刚度值。
5. 切向刚度:切向刚度(Tangential Stiffness)用于控制接触面之间的切向刚性。
切向刚度值的大小将影响模拟结果的准确性。
通常需要根据实际情况选择适当的切向刚度值,以获得更接近实际情况的模拟结果。
6. 相对速度:在某些情况下,可能需要考虑轴和孔之间的相对速度。
相对速度是指轴相对于孔的转动速度。
如果存在相对速度,则需要设置相应的相对速度值,以便在模拟中考虑转动过程中的相对运动。
通过以上步骤,可以在Workbench中设置轴相对于孔转动的接触方式。
通过合理选择接触类型、摩擦模型、法向和切向刚度等参数,可以更准确地模拟转动过程中的物理现象,为实际问题提供更有价值的参考数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S16-11
接触探测
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
第16章 在正则模态分析中使用粘接接触
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-1
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-12
可能的接触状态
主动接触体
相对好的网格 相对柔性材料
距离容差 1 2 3 4
被接触体
•相对差的网格 •相对较硬的材料
1) 节点在单元外,在距离容差外
2) 节点在单元外,在距离容差内 3) 节点在单元内,在距离容差内
4) 节点在单元内,在距离容差外
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation S16-13
求小应变和小的转动。
永久粘接接触建模
● SOLs 101, 103, 105, 107, 108, 109, 110, 111, and 112支持永久粘接接触
● 永久粘接接触是一种特殊的接触类型。要求相互接触的面之间没有相对运
动,并且物体之间初始状态就是接触的。
● 永久粘接接触的一个主要优点在于可以快速的关联起不一致的网格。
a
•显示右侧部件 (p2.2)
b
c
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-26
案例分析:粘接接触
a
•为第2个部件创建柔性接 触体 •选择整个组 •点击Apply •为右侧部件创建接触体 完毕
Right component (p2.2)
根据单元属 性创建2个组
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
c
S16-23
案例分析:粘接接触
a
b
显示左侧部件 (psolid.1)
c
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-18
距离容差(续)
接触体的法向 可用户自定义 默认情况,距离容差为:
实体单元是1/20的最小单元边长 梁、壳单元是1/4的最小厚度
y
Lmin
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-21
案例分析:粘接接触
a
c
b
导入文件: 2part.bdf
d
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-22
案例分析:粘接接触
a
b
Left component (psolid.1)
S16-4
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
线性和非线性分析(续)
线性接触建模
● SOL 101 支持线性接触分析 ● 线性接触的定义和SOL 400没有材料非线性时的非线性是一致的,通常要
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-5
接触功能的历史
● MD Nastran中有各种不同功能的接触类型
● GAP contact ● Slide line contact – SOL 106, 129 (version 68+)
如果接触力小于分离力,保持接触
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-15
3) 节点在单元内,在距离容差内
接触节点受到接触体的抵抗 内力平衡
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
e
d
f e b
c
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation S16-27
gLeabharlann 案例分析:粘接接触a•选择正则模 态分析类型
d b
c e
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-16
4) 节点在单元内,在距离容差外
节点穿透 时间步长缩减,重新迭代 如果在分析初始发生穿透,不会发生接触
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation S16-17
距离容差
接触距离容差对计算花费和求解的准确度有影响 接触距离容差太小:
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-20
案例分析:粘接接触
● 导入如下两个网格不协调一致的部件 ● 用粘接接触将他们关联起来 ● 进行正则模态分析
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
● Full 3D contact – SOL 600 (version 2004+)
● Full 3D contact – SOL 400 (MD Nastran R2+) ● 3D linear contact – SOL 101 (MD Nastran R2+) ● 3D linear glued contact – SOLs 101, 103, 105, 107, 108, 109, 110,
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation S16-9
可能的接触体
● 可变形体
● 物体是可变形的 ● 具有应力和温度分布
● 刚体(本课程不加讨论)
● 物体是不可变形的,是刚性的 ● 没有应力分布 ● 固定的温度值
接触探测困难,计算花费高 有更多节点需要考虑穿透,导致增量步的细分,增加计算花费
接触距离容差太大:
过早考虑节点接触,准确性降低
节点过多的穿透表面
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
1) 节点在单元外,在距离容差外
未发生接触 节点保持当前位置
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation S16-14
2) 节点在单元外,在距离容差内
接触节点投影到接触片上 内力平衡
110, 111, 和112
● 在工况控制里,BCONTACT=sid必须方式在最前,或者放置在第
一个子工况中。在模型数据段,由BCONTACT 引用的BCTABLE 卡片中对所有从接触体设置IGLUE=1。
● 初始自由应力接触(Initial stress-free contact)选项可以用来改进刚
S16-28
案例分析:粘接接触
•设置接触
b
c
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-8
有限元分析中的接触(续)
为什么我们需要它?(续)
● 没有公共节点相连的单元不能考虑相互作用,应而在标准的有限
元分析中可直接穿透
● 因此, 标准有限元不能满足接触问题的要求
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-3
线性和非线性分析(续)
●
非线性分析的来源
● 几何非线性 ● 运动学关系是非线性的 ● 大位移和大转动 ● 预应力 ● 跟随力 ● 载荷是位移的函数
体模态。
NAS122, Section 16, August 2010 Copyright 2010 MSC.Software Corporation
S16-7
有限元分析中的接触
为什么我们需要它? 有限元基于 ―局部支持” 的概念—节点和单元仅与相邻节点相 传递。