PCON-IO功能
博途里面的i o字段
博途里面的i o字段【最新版】目录1.博途软件简介2.IO 字段的定义与作用3.IO 字段的应用实例4.IO 字段的优缺点分析5.总结正文1.博途软件简介博途(Botu)是一款面向工业自动化领域的软件平台,它集成了工程设计、项目管理、设备配置、调试、运维等功能。
博途平台提供了丰富的工具和库,使得工程师可以高效地开发和部署工业自动化项目。
2.IO 字段的定义与作用在博途软件中,IO 字段是指输入/输出(Input/Output)字段。
它是一种数据类型,用于定义在软件中如何处理输入和输出信号。
IO 字段可以用于配置设备的输入输出通道、数据格式、采样周期等参数。
简单来说,IO 字段主要用于描述工业自动化设备与软件之间的数据交互。
3.IO 字段的应用实例在博途软件中,IO 字段被广泛应用于各种工业自动化设备和通信协议的配置。
以下是一些 IO 字段的应用实例:- 配置 PLC 的输入输出通道:通过 IO 字段,工程师可以定义 PLC 的输入输出通道,以便在软件中读取或写入数据。
- 配置传感器的数据格式:IO 字段可以用于定义传感器输出的数据格式,例如,字节、整数、浮点数等。
- 配置通信协议:IO 字段可以用于配置通信协议,例如,Modbus、Profinet、CAN 等。
4.IO 字段的优缺点分析IO 字段的优点:- 灵活性:IO 字段可以根据不同的设备和通信协议进行配置,具有较高的灵活性。
- 易用性:IO 字段的配置方法简单易懂,降低了工程师的学习成本。
- 高效性:IO 字段可以提高数据处理速度,缩短工程开发周期。
IO 字段的缺点:- 复杂性:IO 字段的配置较为复杂,需要工程师具备一定的专业知识和经验。
- 局限性:IO 字段主要应用于博途软件,具有一定的局限性。
5.总结IO 字段在博途软件中具有重要作用,它用于定义工业自动化设备与软件之间的数据交互。
IO 字段具有灵活性、易用性和高效性等优点,但也存在一定的局限性和复杂性。
实验2 GPIO实现LED流水灯

实验二IO口实现LED灯闪烁一、实验目的:1.正确安装keil软件2.正确安装调试驱动,熟悉实验板的用法3.学习IO口的使用方法。
二、实验设备:单片机开发板、学生自带笔记本电脑三、实验内容:利用单片机IO口做输出,接发光二极管,编写程序,使发光二极管按照要求点亮。
四、实验原理:1.LPC1114一共有42个GPIO,分为4个端口,P0、P1、P2口都是12位的宽度,引脚从Px.0~Px.11,P3口是6位的宽度,引脚从P3.0~P3.5。
引脚的内部构造如图所示。
其中Rpu为上拉电阻、Rpd为下拉电阻。
2.为了节省芯片的空间和引脚的数目,LPC1100系列微处理器的大多数引脚都采用功能复用方式,用户在使用某个外设的时候,要先设置引脚。
控制引脚设置的寄存器称之为IO配置寄存器,每个端口管脚PIOn_m都分配一个了一个IO配置寄存器IOCON_PIOn_m,以控制管脚功能和电气特性。
3.IOCON_PIOn_m寄存器其位域定义如表所列。
4.各引脚IOCON寄存器的位[2:0]配置不同的值所相应功能。
5.GPIO寄存器GPIO数据寄存器用于读取输入管脚的状态数据,或配置输出管脚的输出状态,表5-5对GPIOnDATA寄存器位进行描述。
GPIO的数据方向的设置是通过对GPIOnDIR寄存器的位进行与或操作实现的,LPC1100微处理器和8051单片机的GPIO不同,在使用前一定要先设置数据方向才能使用,6.发光二级管的工作电压和工作电流如何?___________________________________________________________________________ ___________________________________________________________________________ _________________________________________________________________________。
TCONPCON
pcon寄存器PCON主要是为CHMOS型单片机的电源控制而设置的专用寄存器,单元地址是87H,其结构格式如下:表2 PCON电源管理寄存器结构PCON D7 D6 D5 D4 D3 D2 D1 D0位符号 SMOD - - - GF1 GF0 PD IDL在CHMOS型单片机中,除SMOD位外,其他位均为虚设的,SMOD是串行口波特率倍增位,当SMOD=1时,串行口波特率加倍。
系统复位默认为SMOD=0。
各位的定义: SMOD:该位与串口通信有关。
SMOD=0; 串口方式1,2,3时,波特率正常。
SMOD=1; 串口方式1,2,3时,波特率加倍。
GF1,GF0:两个通用工作标志位,用户可以自由使用。
PD:掉电模式设定位。
PD=0 单片机处于正常工作状态。
PD=1 单片机进入掉电(Power Down)模式,可由外部中断或硬件复位模式唤醒,进入掉电模式后,外部晶振停振,CPU、定时器、串行口全部停止工作,只有外部中断工作。
IDL:空闲模式设定位。
IDL=0 单片机处于正常工作状态。
IDL=1 单片机进入空闲(Idle)模式,除CPU不工作外,其余仍继续工作,在空闲模式下可由任一个中断或硬件复位唤醒。
TCONTCON(Timer Control Register)定时器/计数器控制寄存器TCON在特殊功能寄存器中,字节地址为88H,位地址(由低位到高位)为88H一8FH,由于有位地址,十分便于进行位操作。
TCON的作用是控制定时器的启、停,标志定时器溢出和中断情况。
TCON的格式如下图所示。
其中,TFl,TRl,TF0和TR0位用于定时器/计数器;IEl,ITl,IE0和IT0位用于中断系统。
各位定义如下:TF1:定时器1溢出标志位。
当定时器1计满溢出时,由硬件使TF1置“1”,并且申请中断。
进入中断服务程序后,由硬件自动清“0”,在查询方式下用软件清“0”。
TR1:定时器1运行控制位。
由软件清“0”关闭定时器1。
盆底肌生物反馈电刺激治疗神经源性膀胱的临床研究

中国初级卫生保健2021年5月第35卷第5期(总第425期)盆底肌生物反馈电刺激治疗神经源性膀胱的临床研究林蔼云①李美玲①刘生发①摘要目的:探讨盆底肌生物反馈电刺激(PES)治疗脊髓损伤后神经源性膀胱(NB)的临床效果。
方法:选取2017年1月一2020年6月张掖人民医院收治的60例NB患者进行研究,按照随机数字表法将其分为对照组和研究组,每组各33例。
对照组使用常规康复治疗,研究组在对照组基础上使用PEFS治疗,对比治疗4周后两组患者排尿情况(日均排尿次数、日均单次排尿量、日单次最大排尿量和导尿次数)、尿流动力学指标[残余尿量(RUV)、最大膀胱容量(MBC)、最大尿流率(MFR)、膀胱内压力(BP)]、排尿症状评分(USDS、LUTS)和生存质量(WHO-QOL-BREF评分)。
结果:治疗4周后,两组日均排尿次数、日均单次排尿量、日单次最大排尿量、BP、MBC、MFR和WTO-QOL-BREF评分较治疗前显著上升,而导尿次数、RUV、USDS评分和LUTS评分显著降低(P v0.05),且研究组上述指标与同期对照组对比差异显著(P<0.05)o结论:应用PES治疗NB患者,可有效改善患者贮尿、排尿功能,缓解泌尿症状困扰程度以及下尿路症状,并可提升患者生活质量,具有较好的临床应用价值。
关键词神经源性膀胱盆底肌生物反馈电刺激doi:10.3969/j.issn.l001-568X.2021.05.0029中图分类号R694文献标识码B文章编号1001-568X(2021)25-0289-24Clinical Study of Pelvic Floor Muscle Biofeedback Electrical Stimulation in the Treatment of Neurogenic Bladder/LIN As-yun,LI Mei-ling,LIU Sheng--a//Lhinesc Primar/Hedth Carr,2221,35(5):89-91,94Abstrrct OBJECTIVE To investigate the clinical effects of pelvic floor muscle biofeedback electrical stimulation(PES)in the treatment of eecrofecic blaCder(NB)after spinal cord injury(SCI).METHODS60patiectr aCmitted te targei from Jacuary2217te June2222were selected foe the study,acV they were divined inte ccntroi eroup anV study aeup acccrginv te the racVom numbee te-ble me t h o f w ith33cases in eacC aeup-Controi aeup was treatee with ccnvedtionai vedaCilitaUon,and study aeup was treatee with PEF ou the basis ofccutroi aeup.After4weeks of teatmeet,the urinatiou diaries(aveeae dailv urinatiou feqpedcy,averaaedailv sinvle urinatiou velume,dailv maximumsinale urinatiou velume,catheterization fequedcy),uedynamic inVicctors[esidud urine velume(RUV),maximum^8X0,c apacith(MBC),maximum urinc Cow rate(MFR),blaCder pressure(BP)],urinatiou symptom score(USDS,LUTS)and quality of life(WHO-QOL-BREF scce)were ccmpared betweea these two aeups.RESULTS After 4weeds of teatmedt,the averaae daCy urinatiou fequedcy,averaae dadu sinale urinatiou velume,daCy maxirnum sinaledrinatiou velume,BP,MBC,MFR aiui WTO-QOL-BREF scce in these two aeups were sivnificaxtlu nicreased ccmpared with those before teatmeat while the catheterizatiou feqpedcy,RUV,USDS score and LUTS score were sivnificaxtlu decreased(P<0.05),ana the aCore innicators in stupy aeup were sivnificaxtlu Umeeqt from those in ccnWoi aeup durina the same perioU(P<0.05).CONCLUSION Pelvic C oos muscle biofeeddacy elecwicai stimulatiou for patiedts with nedeueqic blaXder ccu IU enectivelu improw the urinary stoeae ant urinatiou firnctiou,reliere urinae symptoms ant I owcs urinary tract symptoms,ant improw the quaUty of life of patiedtswith gooU appUcation vvlue.Keywords nedeuedic00X060pelvic Coor muscle,biofeedbacy electricai stimulatiouFirs i-author*s addres s Zhanaye People's Hospital Affiliated to Hexi University,Zhanaye,Gansy,734400,China脊髓损伤(spinai ccrd injue,SCI)是指由外界直、间接等因素导致脊髓结构及功能损伤,致使损伤平面以下的运动、感觉及大小便功能障碍,给患者日常生活带来改变,也会增加社会经济损失叭神经源性膀胱(NB)是SCI后常见合并症之一,患者伴有不同程度的膀胱顺应性降低、膀胱内压增高等,可引发尿路感染、肾功能衰竭等危险,增加患者痛苦,严重影响生活质量目前,临床上治疗NB的方法主要有药物治疗、康复治疗和神经调节技术等,但疗效存在一①河西学院附属张掖人民医院甘肃张掖774000定争议現盆底肌生物反馈电刺激(PES)是近年来引进的新技术,其工作原理为通过可视化信号和语音提示指导患者进行训练,提高了患者盆底肌训练的参与度及积极性,引导患者以可控的方式指导训练,可有效改善患者膀胱功能叫鉴于此,本研究主要探究PES 治疗脊髓损伤后NB患者的效果。
psoc芯片

psoc芯片PSoC芯片(Programmable System-on-Chip)是一种可编程的系统芯片,由赛普拉斯半导体(Cypress Semiconductor)研发和生产。
PSoC芯片以其灵活性和多功能性而受到广泛关注和应用。
PSoC芯片是一种集成了数字和模拟功能的单片微控制器。
它具有可编程的数字逻辑、模拟电路和输入输出引脚,使得用户可以根据自己的需求来自定义和配置芯片的功能。
PSoC芯片使用了一种称为“Universal Digital Block”(UDB)的技术,它允许用户创建和配置各种数字逻辑和模拟电路,从而实现所需的功能。
PSoC芯片的核心是一款Arm Cortex-M0或Cortex-M3微控制器。
这些微控制器具有高性能和低功耗的特点,使得PSoC芯片在许多应用中具有优势。
同时,PSoC芯片还集成了丰富的外设和接口,如ADC(模数转换器)、DAC(数模转换器)、I2C、SPI、UART等,为用户提供了更多的选项和灵活性。
PSoC芯片的编程和配置采用了赛普拉斯自家的开发工具PSoC Creator。
PSoC Creator是一个集成开发环境(IDE),它提供了可视化的界面和图形化的配置工具,使得用户可以通过拖拽和连接各种组件来定义芯片的功能和行为。
PSoC Creator还提供了丰富的软件库和组件,帮助用户快速实现各种功能。
PSoC芯片适用于很多应用领域,如消费电子、工业自动化、医疗设备、汽车电子等。
例如,在消费电子领域,PSoC芯片可以用于控制、感应和通信等方面。
它可以作为智能手机、平板电脑和智能手表等设备的核心控制器。
在工业自动化领域,PSoC芯片可以用于控制和监测系统,实现自动化和智能化。
总之,PSoC芯片是一种灵活多功能的可编程系统芯片,通过其提供的可编程数字逻辑和模拟电路,可以实现各种各样的功能和应用。
它的高性能、低功耗以及丰富的外设和接口使得它在许多领域有着广泛的应用前景。
通信的三种基本类型
通信的三种基本类型常用的通信从传输方向上可以分为单工通信、半双工通信、全双工通信三类。
单工通信就是指只允许一方向另外一方传送信息,而另一方不能回传信息。
比如电视遥控器、收音机广播等,都是单工通信技术。
半双工通信是指数据可以在双方之间相互传播,但是同一时刻只能其中一方发给另外一方,比如我们的对讲机就是典型的半双工。
全双工通信就发送数据的同时也能够接收数据,两者同步进行,就如同我们的电话一样,我们说话的同时也可以听到对方的声音。
UART 模块介绍IO 口模拟串口通信,让大家了解了串口通信的本质,但是我们的单片机程序却需要不停的检测扫描单片机 IO 口收到的数据,大量占用了单片机的运行时间。
这时候就会有聪明人想了,其实我们并不是很关心通信的过程,我们只需要一个通信的结果,最终得到接收到的数据就行了。
这样我们可以在单片机内部做一个硬件模块,让它自动接收数据,接收完了,通知我们一下就可以了,我们的 51 单片机内部就存在这样一个 UART 模块,要正确使用它,当然还得先把对应的特殊功能寄存器配置好。
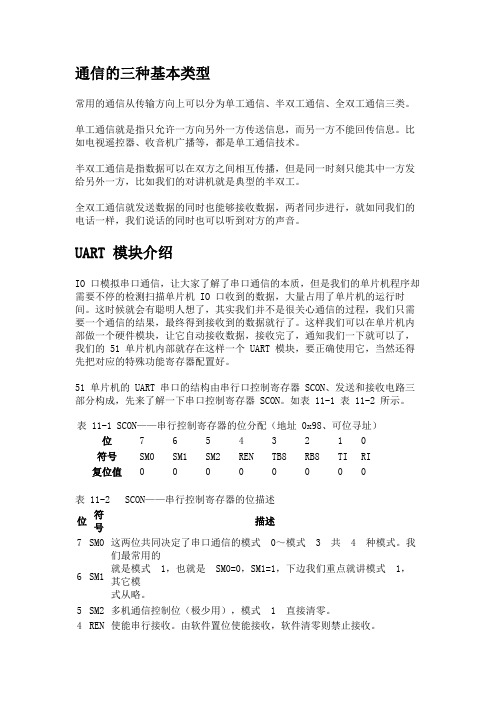
51 单片机的 UART 串口的结构由串行口控制寄存器 SCON、发送和接收电路三部分构成,先来了解一下串口控制寄存器 SCON。
如表 11-1 表 11-2 所示。
表 11-1 SCON——串行控制寄存器的位分配(地址 0x98、可位寻址)位7 6 5 4 3 2 1 0符号SM0 SM1 SM2 REN TB8 RB8 TI RI复位值0 0 0 0 0 0 0 0表 11-2 SCON——串行控制寄存器的位描述位符号描述7 SM0 这两位共同决定了串口通信的模式0~模式 3 共 4 种模式。
我们最常用的就是模式1,也就是SM0=0,SM1=1,下边我们重点就讲模式1,其它模式从略。
6 SM15 SM2 多机通信控制位(极少用),模式 1 直接清零。
4 REN 使能串行接收。
由软件置位使能接收,软件清零则禁止接收。
51单片机特殊功能寄存器

51单⽚机特殊功能寄存器51单⽚机特殊功能寄存器(SFR)介绍作者:huqin 来源:本站原创点击数: 5937 更新时间:2013年12⽉28⽇【字体:⼤中⼩】1、21个寄存器介绍51系列单⽚机内部主要有四⼤功能模块,分别是I/O⼝模块、中断模块、定时器模块和串⼝通信模块(串⾏I/O⼝),如其结构和功能如下图:图1 51单⽚机结构和功能图51单⽚机掌握的好坏,其实就是能否正确操作这四个功能模块,⽽其操作的实质则⼜是能否对每个模块所对应寄存器的正确操纵。
所以下⾯重点介绍⼀下51系列单⽚机内部的特殊功能寄存器(简称SFR,以下说明以此代替)。
(关于什么叫特殊功能寄存器,这⾥先不作介绍,不懂的请查阅51单⽚机相关资料。
)51单⽚机内部共有21个SFR,其布局如图2,从图中可以看出,每个SFR 占1个字节,多数字节单元中的每⼀位⼜有专⽤的“位名称”。
这21个SFR⼜按是否可以位寻址分为两⼤部分,ACC、IE、P1等11个可以位寻址,SP、TMOD 等不可以位寻址。
图2 51单⽚机SFR布局图2、位寻址解释下⾯以P1、IE寄存器(可位寻)和TMOD(不可位发)为例解释⼀下位寻址。
能位寻址是指能够对它的每⼀位都可以进⾏位操作,如图3,如P1⼝接8个灯,灯阳极接正极,阴极接单⽚机的P1⼝的8个脚。
现在要让接P1⼝第1个引脚的灯亮,程序中可以写P1=0xfe,也可以先定义deng1=P1^0,即P1⼝的第1位,⾄于为什么写P1^0,是因为KEIL软件规定的,然后deng1=0。
也就是P1=0xfe和deng1=0都是可以点亮第⼀个灯,后者deng1=0属于位操作,前者P1 =0xfe属于总线操作,也就是8个引脚⼀起操作。
图3 8位灯接线图下⾯再以IE寄存器为例进⾏位操作的解释。
IE寄存器为中断允许寄存器,如各位的作⽤如图4.其中第7位EA是51单⽚机5个中断的总开关,如要进⼊任何⼀个中断时,需先把EA打开,因为可以进⾏位操作,此时程序有两种写法:1)IE=0x80(假如其它位为0,即1000 0000),也可以直接写EA=1,后者EA=1即属于位操作。
cpo交换机结构 -回复
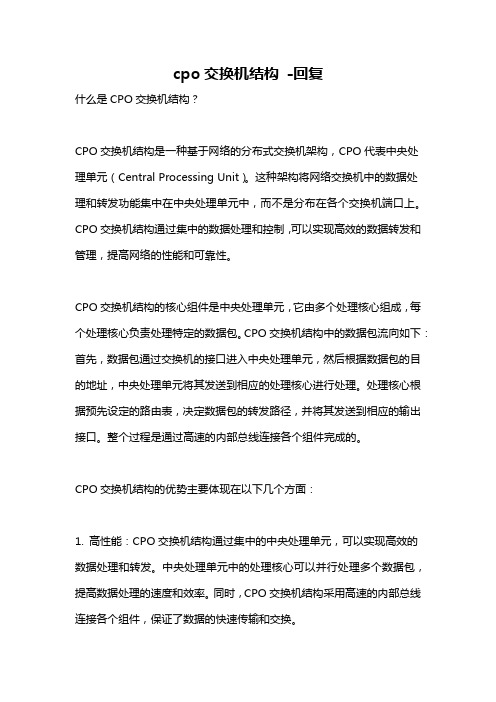
cpo交换机结构-回复什么是CPO交换机结构?CPO交换机结构是一种基于网络的分布式交换机架构,CPO代表中央处理单元(Central Processing Unit)。
这种架构将网络交换机中的数据处理和转发功能集中在中央处理单元中,而不是分布在各个交换机端口上。
CPO交换机结构通过集中的数据处理和控制,可以实现高效的数据转发和管理,提高网络的性能和可靠性。
CPO交换机结构的核心组件是中央处理单元,它由多个处理核心组成,每个处理核心负责处理特定的数据包。
CPO交换机结构中的数据包流向如下:首先,数据包通过交换机的接口进入中央处理单元,然后根据数据包的目的地址,中央处理单元将其发送到相应的处理核心进行处理。
处理核心根据预先设定的路由表,决定数据包的转发路径,并将其发送到相应的输出接口。
整个过程是通过高速的内部总线连接各个组件完成的。
CPO交换机结构的优势主要体现在以下几个方面:1. 高性能:CPO交换机结构通过集中的中央处理单元,可以实现高效的数据处理和转发。
中央处理单元中的处理核心可以并行处理多个数据包,提高数据处理的速度和效率。
同时,CPO交换机结构采用高速的内部总线连接各个组件,保证了数据的快速传输和交换。
2. 可扩展性:CPO交换机结构支持模块化的设计,可以根据需要灵活扩展交换机的规模和性能。
通过增加处理核心和内部总线的数量,可以增加交换机的处理能力和带宽。
这种可扩展性使得CPO交换机结构适用于各种规模和需求的网络环境。
3. 高可靠性:CPO交换机结构通过集中的中央处理单元和内部总线连接各个组件,实现了高度的冗余和容错能力。
当某个处理核心或内部总线发生故障时,其他组件可以接管其功能,并保证网络的正常运行。
此外,CPO 交换机结构中的路由表是动态更新的,可以根据网络变化自动调整,提高网络的可靠性和稳定性。
4. 灵活的管理和控制:CPO交换机结构通过中央处理单元,可以实现对整个网络的统一管理和控制。
单片机电源管理寄存器PCON的用法
单片机电源管理寄存器PCON的用法2010-07-01 08:35:26| 分类:单片机| 标签:|字号大中小订阅我们知道单片机内部有一个电源管理寄存器PCON,这个寄存器的最低两位,IDL和PD这两位分别用来设定是否使单片机进入空闲模式和掉电模式。
1. 空闲模式当单片机进入空闲模式时,除CPU处于休眠状态外,其余硬件全部处于活动状态,芯片中程序未涉及到的数据存储器和特殊功能寄存器中的数据在空闲模式期间都将保持原值。
但假若定时器正在运行,那么计数器寄存器中的值还将会增加。
单片机在空闲模式下可由任一个中断或硬件复位唤醒,需要注意的是,使用中断唤醒单片机时,程序从原来停止处继续运行,当使用硬件复位唤醒单片机时,程序将从头开始执行。
让单片机进入空闲模式的目的通常是为了降低系统的功耗,举个很简单的例子,大家都用过数字万用表,在正常使用的时候表内部的单片机处于正常工作模式,当不用时,又忘记了关掉万用表的电源,大多数表在等待数分钟后,若没有人为操作,它便会自动将液晶显示关闭,以降低系统功耗,通常类似这种功能的实现就是使用了单片机的空闲模式或是掉电模式。
以STC89系列单片机为例,当单片机正常工作时的功耗通常为4mA~7mA,进入空闲模式时其功耗降至2mA,当进入掉电模式时功耗可降至0.1μA以下。
2. 休眠模式当单片机进入掉电模式时,外部晶振停振、CPU、定时器、串行口全部停止工作,只有外部中断继续工作。
使单片机进入休眠模式的指令将成为休眠前单片机执行的最后一条指令,进入休眠模式后,芯片中程序未涉及到的数据存储器和特殊功能寄存器中的数据都将保持原值。
可由外部中断低电平触发或由下降沿触发中断或者硬件复位模式换醒单片机,需要注意的是,使用中断唤醒单片机时,程序从原来停止处继续运行,当使用硬件复位唤醒单片机时,程序将从头开始执行。
【例】:开启两个外部中断,设置低电平触发中断,用定时器计数并且显示在数码管的前两位,当计到5时,使单片机进入空闲(休眠)模式,同时关闭定时器,当单片机响应外部中断后,从空闲(休眠)模式返回,同时开启定时器。
Pcon PCON-C CG CF 控制器 定位型 说明书 第五版

[设置、运行、维护]
● 使用产品时,请根据需要使用防护手套、防护眼镜及安全靴等,以确保安全。
[废弃]
● 产品无法使用或不需要时,请作为工业废弃物作适当废弃处理。
其 他
■ 如未能遵守全部“安全注意事项” ,本公司将不承担任何责任。
目录
1. 概要 ................................................................................................................... 1
4. 最新数据的保存提示
本产品采用非挥发性存储器作为位置表和参数的存储媒体。通常情况下切断电源时将会保持数据, 但当非挥发性存储器发生故障时,数据将会丢失。 另外,因其他原因需要更换控制器时,为尽快恢复数据,强烈推荐保存位置表和参数的最新数据。 保存方法如下 : ① 使用联机软件,存储到光盘或软盘中。 ② 制作位置表或参数表,以书面形式保留。
● ● ●
产品出现异常发热、冒烟或异味时,请立即切断电源。继续使用可能导致产品破损或引起火灾。 产品的保护装置(报警)启动时,请立即切断电源。否则可能因产品异常运转导致受伤或产品的 破损及损伤。切断电源后,请查明并排除报警原因,然后重新接通电源。 如果接通电源后产品的 LED 不亮,请立即切断电源。运行端的保护装置(保险丝等)可能未切 断并继续工作。故障修理请委托购买本产品的本公司销售单位。
1
2
3 4
5
CAUTION
②伺服 ON 输入信号(SON)有效 / 无效的选择 本控制器设有伺服 ON 输入信号,以便在 PLC 侧可以对伺服 ON/OFF 进行控制,因此需要选择 该信号有效或无效。 选择方法为在参数 No.21(伺服 ON 输入无效选择)中设定数字 0 或 1。 有效(使用) 无效(不使用) 出厂时设定为 0[有效] 。 ③暂停信号(*STP)有效 / 无效的选择 根据失效保护设计,暂停信号采用常闭接点。 因此,通常情况下需要事先将其调整为 ON 状态。 但考虑到部分不使用该信号的用途,可通过参数进行选择,无需特意将其设定为 ON 状态。 选择方法为在参数 No.15(暂停输入无效选择)中设定数字 0 或 1。 有效(使用) 无效(不使用) 出厂时设定为 0[有效] 0 1 0 1
PCON

SMOD=1; 串口方式1,2,3时,波特率加倍。
GF1,GF0:两个通用工作标志位,用户可以自由使用。
PD:掉电模式设定位。
PD=0 单片机处于正常工作状态。
PD=1 单片机进入掉电(Power Down)模式 ,可由外部中断或硬件复位模式唤醒,进入掉电模式后,外部晶振停振,CPU、定时器、串行口全部停止工作,只有外部中断工作。
IDL:空闲模式设定位。
IDL=0 单片机处于正常工作状态。
IDL=1 单片机进入空闲(Idle)模式,除CPU不工作外,其余仍继续工作,在空闲模式下可由任一个中断或硬件复位唤醒。
追0X00;吗?
PCON主要是单片机的电源控制而设置的专用寄存器,单元地址是87H,其结构格式如下:
PCON D7 D6 D5 D4 D3 D2 D1 D0
位符号 SMOD - - - --- GF1 GF0 PD IDL
各位的定义:
SMOD:该位与串口通信有关。
8051的引脚定义及功能

8051的引脚定义及功能8051是一种经典的8位单片机,最早由Intel公司于1980年推出。
它具有许多功能丰富的引脚,用于连接外围设备和实现各种功能。
下面是8051的引脚定义及其功能的详细说明。
1.P0口:P0.0-P0.7为8位双向通用IO口,可连接外围设备或扩展芯片。
P0口可通过对相应位进行读写来实现读取和输出数据。
2.P1口:P1.0-P1.7为八位双向通用IO口,功能同P0口类似。
与P0不同的是,P1口还具有输入/输出控制功能。
P1口的输入/输出控制位可分别设定为输入模式或输出模式。
3.P2口:P2.0-P2.7为8位双向通用IO口,功能同P0口类似。
P2口还具有外部数据总线的能力,用于连接外部存储器或其他设备。
4.P3口:P3.0-P3.7为8位双向通用IO口,功能同P0口类似。
P3口还具有一些额外的功能引脚,如P3.0/RXD和P3.1/TXD用于串口通信,P3.2/INT0和P3.3/INT1用于外部中断。
5.RST引脚:复位引脚,用于将单片机复位到初始状态。
在复位时,所有寄存器和引脚都会被初始化。
6.ALE引脚:地址锁存使能引脚,用于在外部总线上锁存地址信号。
在每个时钟周期的开始,ALE引脚会产生一次正脉冲,用于锁存当前的地址。
7.PSEN引脚:程序存储器使能引脚,用于选择外部程序存储器或内部程序存储器。
当PSEN为低电平时,外部程序存储器被选中。
8.EA/VPP引脚:程序存储器地址扩展/编程电压引脚。
EA引脚用于控制程序存储器地址空间的扩展,VPP引脚用于编程时的供电电压。
9.XTAL1和XTAL2引脚:外部晶体振荡器引脚。
通过连接外部晶体和相关电路,可以实现单片机的时钟源。
10.VCC和GND引脚:供电引脚。
VCC引脚连接正电压,GND引脚连接地。
11.ADC引脚:模拟数字转换引脚,用于连接外部模拟输入设备。
8051的ADC引脚能够将模拟信号转换为数字信号,供单片机进行处理。
pcomm使用说明

您正在看的C++Builder教程是:用Pcomm Pro开发串行通信程序。
用C ++Builder 在Win9x 下开发串行通信程序是程序员们经常遇到却又令人头痛的事情,不但要理解许多复杂的API 函数,还要掌握多线程编程。
令人欣慰的是有一些公司专门为C ++Builder 开发了编写串行通信程序的开发工具,例如MOXA 公司的Pcomm(该软件可在http:\\ 下载),因而帮我们解决了串行编程这一难题。
----下面结合一个具体的例子来说明串行通信程序的开发。
本程序的编程环境是Win98 和C ++Builder3.0。
这个编程示例的功能比较强,它具有发送数据和自动接收数据的双重功能。
在它的基础上稍加修改,即可以让用户选定进行传输的通信端口,并设定这个端口的相关参数,包括波特率、数据位、停止位、奇偶校验和流量控制等。
一、Pcomm 的设置----启动C ++Builder3.0,点击File/New Application,建立一个项目文件,修改表单的Name 属性为Comm, 然后存盘,命名项目(Project)为CommTest,命名单元(Unit) 为Comm。
----Pcomm Library 是一个动态连接库(DLL)文件,当使用C ++Builder 编译器编译PComm.dll 库时,我们必须告诉C ++Builder 的编译器怎样找到这些函数(sio_xxx())。
----因此我们用PComm Pro 在Borland C ++Builder 中开发一个串行程序时,必须做到以下两点:假如你的Pcomm Pro 是安装在c:\Program files(缺省安装目录)目录下,把c:\Program files \ Pcomm Pro \ Lib 下的Pcommb.lib 文件加入到C ++Builder 的View 菜单中Project Manager 的项目中,使之成为项目的一个单元(unit)。
埃斯顿伺服参数及IO接线

埃斯顿伺服参数及IO接线一、速度模式(内部接点)1、IO接线CN1-13——24VDC+CN1-14——/S-ON 伺服ON 输入CN1-15——/P-CON 零钳位CN1-41——/P-CL 内部速度选择输入CN1-42——/N-CL 内部速度选择输入CN1-9——/S-RDY 伺服准备就绪输出/P-CON /P-CL /N-CL 运行速度0 0 0 00 0 1 speed10 1 0 speed20 1 1 speed31 0 0 speed41 0 1 speed51 1 0 speed61 1 1 speed72、参数设置Pn000.0——0 外部伺服ON 需重启Pn005.1——3 控制方式:内部速度控制(接点)需重启Pn316——内部设定速度1Pn317——内部设定速度2Pn318——内部设定速度3Pn319——内部设定速度4Pn320——内部设定速度5Pn321——内部设定速度6Pn322——内部设定速度7Pn306——加速时间二、位置模式(内部接点)1、IO接线CN1-13——24VDC+CN1-14——/S-ON 伺服ON 输入CN1-9——/S-RDY 伺服准备就绪输出CN1-11——/COIN 定位完成输出2、参数设置Pn000.0——0 外部伺服ON 需重启Pn201——电子齿轮比分子需重启Pn202——电子齿轮比分母需重启Pn005.1——C 控制方式:内部位置控制(接点)需重启Pn600——×10000脉冲Pn601——×1脉冲Pn632——点位速度控制1Pn684——0 选择点位控制的终点三、位置模式(脉冲列指令)1、IO接线CN1-13——24VDC+CN1-14——/S-ON 伺服ON 输入CN1-31——/PULS 指令脉冲输入CN1-32——/SIGN 指令符号输入CN1-34——24VDC+ 集电极开路电源输入CN1-9——/S-RDY 伺服准备就绪输出CN1-11——/COIN 定位完成输出2、参数设置Pn000.0——0 外部伺服ON 需重启Pn201——电子齿轮比分子需重启Pn202——电子齿轮比分母需重启Pn005.1——1 控制方式:位置控制(脉冲列指令)需重启Pn004.2——0 符号+脉冲指令四、辅助参数Fn001 恢复出厂值伺服OFF时可设Fn002 点动(JOG)。
宜科全新推出Compact67分布式IO模块

宜科公司全新推出的支持IO-Link 协议的Compact 67分布式I/O 模块高,现场有大量用于位置监控的接近开关,检测气缸状态的磁性开关,以及电磁阀等执行机构来完成控制系统模块虽然可以满足现场连接的需求,但在应用的灵活性、安装尺寸、产品价格等方面还有不足。
宜科公司全新推出的支持IO-Link 协议的IO-Link 主站和子站集线器的搭配,可以为用户提供更加经济、便捷的解决方案,方便客户布线、安装和维护。
技术的IP67主站模IO-Link 传感器的数IO-Link 信号集线件行业智能化制造设备的应用。
汽车零部件行业生产现场安装有大量的传感器与执行器,得益于宜科等级,客户可以将传统的柜内硬件真正分布至生产装配线的最末端,实现灵活安装,高效通信,让客户更好地从智能数据采集和通讯解决方案中获益。
Factory Insights as 还充分利用微软云、工业物联网和边缘服务,,使得制造企业能够快速连接各个站点,并跨越其整个企业网络实施各类项目。
这样可以降低客户实施工业物联网(IIoT )
更多精彩请扫描二维码
更多精彩请扫描二维码。
cpio用法 -回复
cpio用法-回复cpio是一个在Unix操作系统中用来进行文件归档和备份的工具。
它的名称来自于Copy Input and Output的缩写,它可以将文件和目录打包成一个单独的归档文件并保存到磁盘上或者通过网络传输。
cpio的用法非常灵活,可以通过命令行参数和选项来实现不同的操作,如创建、提取和列出归档文件中的内容。
下面将详细介绍cpio的用法,包括创建归档、提取文件以及列出归档的内容。
1. 创建归档文件要创建一个新的归档文件,可以使用"-o"选项,后跟一个归档文件名。
例如,要创建一个名为archive.cpio的归档文件,可以使用以下命令:cpio -o > archive.cpio此命令将从标准输入中读取文件和目录,并将它们打包到archive.cpio文件中。
如果要选择特定的文件或目录,可以在命令行上列出它们的路径。
例如,要将目录/dir1和文件file1添加到归档中:cpio -o <dir1 file1 > archive.cpio2. 提取归档文件中的文件要从一个归档文件中提取文件,可以使用"-i"选项,后跟归档文件的名称。
例如,要从archive.cpio中提取所有文件,可以使用以下命令:cpio -i < archive.cpio这将将归档文件中的所有文件提取到当前工作目录中。
如果要将文件提取到不同的目录中,可以使用"-d"选项,并提供目标目录的路径。
例如,要将文件提取到/dir2目录中:cpio -id < archive.cpio在提取文件时,cpio会自动创建必要的目录结构,并将文件放置在正确的位置上。
3. 列出归档文件中的内容要列出归档文件中的内容,可以使用"-t"选项,后跟归档文件的名称。
例如,要列出archive.cpio文件中的内容:cpio -t < archive.cpio这将显示归档文件中包含的所有文件和目录的列表。
PHILIPS PiCCO模块操作说明PPT课件

5.55 4.95 2.75 679 7
l/min
1/min l/min/m2 ml/m2
ml/kg
0C
543 ml/m2
#2 CathCt 341
InjVol 15 ml
C.I. BSA
2.75 2.05
C.O.
5.63
Tblood 37.0
TbAlogoed 37.0
:
36.8………………………………………………………………………………………………….
RR
静AO音udffio
报警 暂停
确认
取消
输入病人统计
Graph Trends
主设定 主屏幕
1 输入病人“姓”
2 按<Enter>键确认
3 输入病人“名”,并输入“医疗记录号”
5
病人信息统计
Smith, David
成人
27 Dec 10:45 监护仪设置 C.O. / CCO
SVR ?
ABP
CCO
人”
Graph Trends
主设定 主屏幕
4
病人信息统计
无病人
成人
27 Dec 10:45 监护仪设置 C.O. / CCO
SVR ?
CCO
8.5 4.0
CCI
SV
SVV
HR
输入病人统计
姓
:
名
:
3 医疗记录号 :
姓
病人类别.
:
ABP 120/70 Sys. (91)
Smi
Pulse
60
CVP - -
: Smith : David
CVP - -
平CV均P - -单位 HZV HI ITBV
cpio用法详细说明
cpio⽤法详细说明1.1 cpio基本介绍cpio是⼀个⾮常古⽼的归档⼯具。
已逐渐被tar替代,但是有些功能是tar不存在的,所以还是分享下它的⽤法。
cpio - copy files to and from archivescpio⽤于创建、解压归档⽂件,也可以对归档⽂件执⾏拷⼊拷出的动作,即向归档⽂件中追加⽂件,或从归档⽂件中提取⽂件。
它也⽀持tar格式的归档⽂件,但是对压缩后的tar(如.tar.gz格式)就没法⽀持了,cpio毕竟不会调⽤对应的(解)压缩⼯具。
cpio⼀般从标准输⼊获取数据,写⼊到标准输出,所以⼀般会结合管道、输⼊重定向、输出重定向使⽤。
cpio有三种运⾏模式:Copy-out模式:此模式下,cpio将向归档⽂件中拷⼊⽂件,即进⾏归档操作,所以成为归档模式。
它会从标准输⼊中读取待归档的⽂件,将它们归档到⽬标⽬标中,若未指定归档的⽬标,将归档到标准输出中。
在copy-out模式下,最典型的是使⽤find来指定待归档⽂件,在使⽤find时,最好加上"-depth"以尽可能减少可能出现的问题,例如⽬录的权限问题Copy-in模式:此模式下,cpio将从归档⽂件中提取⽂件,或者列出归档⽂件中的⽂件列表。
它将从标准输⼊中读取归档⽂件。
任意cpio的⾮选项参数都将认为是shell的glob通配pattern,只有⽂件名匹配了指定模式时才会从中提取出来或list出来。
在cpio中,通配符不能匹配到"."或"/",所以如有需要,必须显式指定"."或"/"。
如果没有指定匹配模式,则解压或列出所有⽂件。
Copy-pass模式:此模式下,cpio拷贝⼀个⽬录树(即⽬录中所有⽂件)到另⼀个⽬录下,并在⽬标⽬录下以同名的⼦⽬录存在。
copy-pass模式是copy-in模式再copy-out模式的结合,它中途没有涉及到任何归档⾏为。
cpio用法 -回复
cpio用法-回复cpio是一个类Unix操作系统上的命令行工具,用于将文件或目录打包成一个归档文件,或从归档文件中提取文件。
一、cipo的基本概述cpio是一个古老而又强大的命令行工具,最初出现在1970年代的Unix 系统中。
它的名字源自Copy Input and Output的缩写,意味着它可以将输入的文件或目录复制到输出设备上。
它通常用于操作大量的文件和目录,以实现备份,迁移或压缩的目的。
二、cpio的基本用法1. 创建归档文件:要创建一个归档文件,我们使用cpio的-o选项。
例如,要将当前目录下的所有文件和目录打包成一个归档文件myarchive.cpio,可以运行以下命令:cpio -o < myarchive.cpio2. 添加文件到归档文件:如果要将其他文件或目录添加到现有的归档文件中,我们可以使用cpio 的-p选项。
例如,要将一个名为newfile.txt的文件添加到归档文件myarchive.cpio,可以运行以下命令:cpio -p < myarchive.cpio newfile.txt3. 从归档文件中提取文件:要从归档文件中提取文件或目录,可以使用cpio的-i选项。
例如,要从归档文件myarchive.cpio中提取所有文件和目录,可以运行以下命令:cpio -i < myarchive.cpio4. 使用特定的文本列表提取文件:有时,我们可能只想从归档文件中提取特定的文件或目录。
为此,我们可以将一个包含要提取文件路径的文本文件传递给cpio命令。
例如,如果我们有一个包含文件路径列表的文件list.txt,我们可以运行以下命令来提取这些文件:cpio -i file=myarchive.cpio < list.txt5. cpio的其他选项:cpio命令还提供了其他一些选项,用于控制归档文件的属性、覆盖现有文件等。
其中一些选项包括:- -v:显示详细的操作日志。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
USB ஏਾ Ȕᄲख RCM-101-USBȕ
ə ݢେࡒ༥ི
ධ
˄دጐ P373˅ Ȕᄲख CON-˰ȕ Ȕᄲख RCM-Eȕ Ȕᄲख RCM-Pȕ
మݢ܌େ
Ȕᄲख CB-RCP2-MAɕɕɕȕ Ꮃ 1m / 3m / 5m ˄ࡒ༥ดވ፺˅
型
类型
C
控
CG
CF
CY
PL / PO
SE
制 器
名称
定位型
安全区域对应型 高推力马达对应型
电磁阀型
脉冲串控制型
串行通信型
机种一览
外观
24V 触摸屏 网关单元 简易绝对 型单元 RoBoNET ERC2 PCON ACON SCON PSEL ASEL SSEL XSEL
内容 定位点数 标准价格
最多可进行 512 点 定位
TL DCLR PEND/INP PM1~PM256 HEND ZONE1
扭矩限制选择信号 偏差计数器清除信号 位置完成信号 完成位置编号信号 原点复位完成信号 区域信号
PZONE
定位区域信号
输出
RMDS *ALM MOVE
SV *EMGS
MODES
运转模式状态信号 控制器报警状态信号 移动中信号 伺服 ON 状态信号 紧急停止状态信号
×
×
网络对应
○ (※2)
×
※1 通过网络及串行通信进行动作。 ※2 对应规格可直接连接到现场网络中。 ※3 可以使用网关单元连接到现场网络中。
PL / PO
脉冲串控制型
× × × ○ ×
SE
串行通信型
特 点
○ 通过指定位置编号并输入启动信号进行动作, (※1) 是基本动作模式。
○ 可利用外部信号移动滑块(拉杆),将停止位 (※1) 置注册为位置数据的模式。
ON时伺服启动,信号 OFF 时伺服关闭。 通过信号 ON,进行原点复位动作。 信号 ON 则切换到示教模式。(此时,必须 CSTR、JOG+、JOG- 全部为 OFF, 驱动轴停止动作,否则无法切换)
本信号为 OFF 时,通过 JOG+、JOG- 进行 JOG 动作。 ON 时,变为通过 JOG+、JOG- 进行微调动作。
标准
H 高加速可搬运规格
※与RCP3-SA4/SA5/SA6 RCP2(RCP2CR)-SA5/SA6 连接时为高加速可搬运规格,
请填写H。
28P 支持 28 角脉冲马达 28SP(支R持CP228-R角A脉3C冲专马用达)
CN CompoNet 接规格 CC CC-Link 接规格
0 无电缆
35P 支持 35 角脉冲马达
֦ᆻቂݢେدጐ P374
Ȕஏਾดވ፺ȕ
ดވ፺ RCP2 Ⴜள ดވ፺ RCP3 Ⴜள
ףబධݢେ Ȕᄲख CB-RCP2-PBɕɕɕȕ
Ꮃ 1m / 3m / 5m ˄ࡒ༥ดވ፺˅
֦ᆻቂݢେدጐ P374
మ܌Ȃףబධᇜ࿒ᄲݢେ Ȕᄲख CB-PCS-MPAɕɕɕȕ
模式状态信号
WEND PE0~PE6
TLR LSO~LS2
写入完成信号 当前位置编号信号 扭矩限制中信号 限位开关输出信号
LOAD
负载输出判定状态
TRQS
扭矩级别状态信号
在示教模式中,指定写入位置,将本信号 ON 20ms 以上,则将当前位置写入指定位置。
电磁阀模式时,本信号 ON 则移动到指定的位置。 (无需启动信号) ON 时,按照参数中所设定的数值,限制马达扭矩。 如果扭矩与设定值不同,则 TLR 信号变为 ON。 本信号变为 ON 期间,不断清除位置偏差计数器。 移动后,到达定位距离内,则信号变为 ON。即使超过定位距离,PEND 也不会变为 OFF,INP 会变为 OFF。通过参数切换 PEND 与 INP。 输出定位完成后到达的位置编号(二进制输出) 原点复位完成则变为 ON。 如果驱动轴的当前位置在参数设定范围内,则该信号变为 ON。
NPN 规格
ؠই௸
P24
R˙22Ω ࢌ༕!ڵ
ࡏኵ!
N
ိݢؠኑ +24V
PNP 规格
ؠই௸
P24V R˙22Ω
ࢌ༕!ڵ N
ࡏኵ!
ိݢؠኑ +24V
网关单元 简易绝对
型单元 RoBoNET
ERC2 PCON ACON SCON PSEL ASEL SSEL XSEL
I/O 规格
512 点
-
C 型的安全 区域对应规格
512 点
-
RCP2 高速型 / 高推力型 可以用与气缸相同
/防水型专用控制器
的控制方式进行驱动
512 点
3点
-
-
脉冲串控制用控制器 - -
串行通信用控制器 64 点 -
型 号
PCON
系列
I
0
类型
马达种类 编码器种类 I/O 种类
I/O 电缆的长度 电源电压 简易绝对型单元 高加速可搬运规格
○ (※1)
只需将位置信号 ON/OFF,就能够进行移动。可以 采用与气缸电磁阀相同的控制方式进行驱动的模式。
×
无需输入位置数据,通过客户的脉冲串控制, 就能够自由进行驱动的模式。
○ (※3)
可以连接到 DeviceNet、CC-Link 等现场网络 中使用。
367 PCON
PCON 控制器
I/O 信号功能说明
ML MECHATROLINK连接规格
2 2m(标准)
42P 支持 42 角脉冲马达
PR PR ProfiBus 连接规格
3 3m
56P 支持 56 角脉冲马达
N 无 I/O(SE 型专用)
5 5m
86P 支持 86 角脉冲马达
※连接 RCP2-RA3C/RGD3C 时,马达种类变为 28SP。
※网络连接规格(DV/CC/PR) 仅支持 C/CG 型。
型室
防
滴
ۋᄵᄪ
型
控 制 器
૿፟ධஏਾݢେ
˄دጐ P329˅ Ȕᄲख CB-RCB-CTL002ȕ
机种一览
PCON-CF ࡴထஉమޭ܌ሥᄲ
PCON-C / CG ށၤᄲ
፵ֻົעྈ૿፟ධቂ
PCON-CY ߞۢݢᄲ
DC24V ݢኑ ˄دጐ P331˅ Ȕᄲख PS-241˄100V ༕˅ȕ Ȕᄲख PS-242˄200V ༕˅ȕ
మݢ܌େ Ȕᄲख CB-RCP2-MAɕɕɕȕ Ꮃ 1m / 3m / 5m ˄ࡒ༥ดވ፺˅ ֦ᆻቂݢେدጐ P374
ףబධݢେ Ȕᄲख CB-RFA-PAɕɕɕȕ Ꮃ 1m / 3m / 5m ˄ࡒ༥ดވ፺˅ ֦ᆻቂݢେدጐ P374
ə!PCON-CF ܿףబධݢେቪඝྊ PCON ܿݢେྈˈྈᇵข ৠᇵ᎙ሃȃ
C 定位型
CG 安全区域对应型
CF 高推力马达对应型
CY 电磁阀型
SE 串行通信型
PL
脉冲串控制型
(差动型)
PO
脉冲串控制型
(开集规格)
I
增量型
20P 支持 20 角脉冲马达
NP NPN 规格(标准) PN PNP 规格 DV DeviceNet 接规格
无填写 内容
未使用
ABU 使用
0 DC24V
无填写 内容
JISL 信号为 OFF 时,检测本信号的 ON 边沿,向+方向、-方向进行 JOG 动作。 在 JOG 动作中检测 OFF 触发,减速停止。
/ /
内控 置制 型器
滑 块 型
拉 杆 型
臂平 杆台 扁 平 旋夹 转爪 型
专无 用尘 型室
防 滴 型
控 制 器
机种一览
PWRT
示教信号
ST0~ST6
启动位置指令
֦ᆻቂݢେ دጐ P374
ߞۢݢᄲቂ I/O ݢେ CB-PACY-PIO020 ݢେ٣ޡ Ꮃ 2m ˄ࡒ༥૿፟ධ˅˅
֦ᆻቂݢେ دጐ P374
ష૿ۋڤ፟ቂ I/O ݢେ CB-PACPU-PIO020 ݢେ٣ޡ Ꮃ 2m ˄ࡒ༥૿፟ධ˅
/ /
PCON 控制器
内控 置制 型器
滑 块 型
拉 杆 型
■型号 C / CG / CF / CY / PL / PO / SE
臂平
杆台 扁
RCP3/RCP2 系列用
平
定位控制器
旋夹 转爪 型
C/CG CF
CYБайду номын сангаасPL/PO SE
专无
用尘
型室
机种一览 / 价格
防 滴
能够驱动 RCP3/RCP2 系列驱动轴的定位控制器。具有能够对应各种控制的 6 种型号全系列产品。
֦ᆻቂݢେ دጐ P374
PCON 控制器
内控
置制
型器
滑 块 型
拉 杆 型
ო٠၃న
臂平 杆台
扁
၃࣋ܠኇ
平
˄P336 دጐ˅
旋夹
DviceNet ࣙࢆ
转爪
Ȕᄲख RCM-GW-DVȕ
型
CC-Link ࣙࢆ
Ȕᄲख RCM-GW-CCȕ ProfiBus ࣙࢆ
专无 用尘
Ȕᄲख RCM-GW-PRȕ
在位置移动时,如果驱动轴的当前位置在位置数据所设定的范围内,则该信号变为 ON。虽然能够用 ZONE1 同时使用,但是 PZONE 仅在向所设定的位置移动时生效。