基于ARM的步进电机细分控制_图文.
基于ARM的步进电机控制课程设计讲解
ARM课程设计专业:电子信息工程班级:姓名:学号:指导教师:目录一、设计的目的与要求 (2)二、方案的设计与论证 (2)三、结构和基本原理 (3)四、软件设计 (9)五、调试 (10)六、课程设计体会 (11)七、参考文献 (12)基于ARM的步进电机控制一、设计的目的与要求1.1 设计目的(1)本次课程设计是在学习了《深入浅出ARM7——LPC213X/214X》课程之后综合利用所学知识完成一个计算机应用系统设计并在实验室实现。
(2)通过课程设计,巩固和加深了对“微机原理与接口技术”课程中所学的理论知识和实验能力,基本掌握计算机接口应用电路的一般设计方法,提高电子电路的设计和实验能力。
(3)加深对计算机软硬知识的理解,获得初步的应用经验,为以后从事生产和科研工作打下一定的基础。
1.2 设计要求(1)设计一个步进电机的控制系统。
(2)用LPC2134+L298+L297使用中断方式以及串口方式进行控制。
(3)可通过按键设定转速和方向。
二、方案的设计与论证2.1 设计分析步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
本次课程设计所设计的步进电机的控制系统可通过键盘设定转速和方向,并能显示转速。
2.2 方案论证方案一:采用ARM7的脉宽调制器PWM产生脉冲对步进电机进行控制。
方案二:利用定时器定时中断进行步进电机的控制。
2.3 方案选择第一种方案中PWM技术是采用脉宽调制技术,即占空比不同的方波电压产生不同的平均电流使步进电机转动,通过调节占空比即可调节电机转速。
虽然很精确,但设置较繁琐。
第二种方案中采用定时器定时中断的方式,只需要几条简单的指令就可以产生具有一定频率和数目的脉冲信号,而且在整个脉冲产生过程中,CPU 可用来处理其他工作,大大提高了系统的实时处理能力。
基于ARM的步进电机的细分驱动
基于ARM的步进电机细分驱动设计班级:自动化0905班组员:王娟娟魏智李飞赵金峰摘要步进电机是一种将电脉冲信号转换成响应角位移或线位移的的机电元件,在机电及自动化领域有着广泛的应用。
其具有控制简单、误差不累积、电机结构简单、可靠性高等特点,在开环控制领域有着越来越重要的应用前景。
步进电机系统的性能主要取决其驱动方法。
本设计采用Arm7系列的芯片LPC2131和步进电机细分驱动技术,实现通过按键控制步进电机28BYJ—48实现正转、反转和调速功能的功能,要求通过4个GPIO发出有序的矩形脉冲,控制驱动芯片ULN2003驱动四相步进电动机,并通过LCD12864同步显示运行状态。
关键词步进电机28BYJ—48 细分驱动ARM系统一.方案设计与论证1.1方案设计步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
本次课程设计所设计的步进电机的控制系统可通过键盘设定转速和方向,并能显示转速。
1.2方案论证1.2.1 驱动电路:由于步进电机的驱动电流较大,单片机不能直接驱动,一般都是使用ULN2003达林顿阵列驱动,当然,使用下拉电阻或三极管也是可以驱动的,只不过效果不是那么好,产生的扭力比较小.1.2.2四相八拍:开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
基于单片机的仪表步进电机的细分控制原理及应用

基于单片机的仪表步进电机的细分控制原理及应用仪表步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机某相线圈加一脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,使得在速度、位置等控制领域用步进电机来控制变得非常简单。
虽然步进电机已被广泛地应用,但步进电机并不像普通的直流电机、交流电机那样在常规下使用。
它必须在双环形脉冲信号、功率驱动电路等组成控制系统下使用。
仪表步进电机属于步进电机中体积、功耗较小的类别,可以由单片机或专用芯片的引脚直接驱动,不需外接驱动器,因而在仪表中被用于指针的旋转控制。
需求分析本方案中使用的仪表具有如下特点和设计参数:●指针响应灵敏、走位准确,即收到驱动脉冲后不能丢步;●指针转动平稳,即指针从当前位置到目标位置之间的走位要平稳,正、反转都不能出现抖动;●两相、步距角10o、转动范围300o。
根据技术参数可知,采用两相四拍和两相八拍时的步距角为10o和5o,在300o的范围内只能作30 和60个刻度划分,在实际应用中,会发现指针步距角不能满足要求而且抖动不可避免。
为了实现指针高精度的准确走位和平稳运转,要对步进电机步距进行高分辨率细分,这也是设计的难点所在。
步进电机的细分技术是一种电子阻尼技术,其主要目的是提高电机的运转精度,实现步进电机步距角的高精度细分。
其基本概念为:步进电机通过细分驱动器的驱动,其步距角变小了。
如驱动器工作在10细分状态时,其步距角只为电机固有步距角的十分之一。
以两相四拍为例:当电机工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动10o;而用细分驱动器工作在10细分状态时,电机只转动了1o。
细分功能完全是由驱动器或单片机靠精确控制电机的相电流所实现的,与电机本身无关。
细分原理两相四拍A、B、/A、/B的驱动状态表如表1所示。
基于ARM的步进电机控制系统
传统的工业控制大多数 是采用 8位单片机为控 制内核 , 其价 格便 宜 、 设计简单 , 易满足一般控制要求 , 是该 单片 容 但 机存 储空间小 , 设资 源较少 , 外 往往需 要与 P c机 联合 控制 才能实现 , 这样带来 的问题是实 时性较差 , 人机 交互较 为复
的 L C 11为控制核心 的 步进 电机控 制系 统 , P 23 实现 对 步进 电机 的驱 动和速度 准确控制 , 并具有很好 的人机界 面。
1 L C 1 1概 述 P 23
根据 系统 的实际需 要和成 本 , 系统选 择 了 N P公 司 该 X 生产 的基 于 L ̄2 3 , / 11 它的 C U是 A M7 D , P R T MI是一种 高性 能、 低功耗 、 价格便 宜的 R S IC处理 器 , 有丰富 的片上 外设 具 资源 , 可在 3 3V的电压下工 作 , . 非常适合 于嵌入 式产 品的 开发 j 。其 主要特点如下 : ( )2位 14引脚的 A 7 D I 13 4 M R T M 内核 ; ( )/ 2 L0电压是 3 3V,P . C U工作 电压是 1 8V; . ( ) 1 K字节 的 S A 8 3有 6 R M,K的片内 F鹊h l ; () 4 通过片 内 P L可实现 6 z L 0MH 的主频 ; () 5 对片 内 F A H支 持 三种 编程 方式 : P lP,T G LS I 。A J A S 在线仿真调试 ;
() 6 步进 电机 的驱动信号 一般要专 门的控制 电路产生 , 不能直接使 用普 通的交流或 直流 电源驱动。步进 电机必 须 由双环形脉 冲信号 、 功率 驱动电路等组成驱动控制系统方可 使 用。
2 2 步进电机的测速办法 . 将驱动信号 的电脉 冲信号转换为角位移或者线位移 , 这 样 的测速优势是 : () 1 过载性好 : 由于 步进 电机 的转速 不受负 载 的影 响, 即当负载加大时电机 的速度保持不变 。 () 2 容易控制 : 由于步进 电机是一 步 一步的 运转 , 以 可
基于ARM的多功能步进电机控制系统设计

多个并行的任务 ,这些任务处于并行运行的工作状 态 ,通过 UCOS2II 操作系统来对各个任务进行调度和 切换 。如果某中断服务提供了一些需要马上被处理 的信息 ,当中断结束后 ,CPU 立刻调度运行相关的任 务来对该信息进行处理 ,大大提高了控制系统对信息 进行处理的实时性 。为步进电机控制系统移入一个 实时操作系统后 ,使得那些关键的需要被及时处理的 信息 ,得到了尽可能快的处理 ,显著的提高了该控制 系统的实时响应性能 ,使 CPU 的利用率达到了最高 , 同时也有利于提高系统的稳定性和可靠性 ,并且使程 序开发更加容易 ,程序也更便于维护。 3. 2 变步距角细分数 ,变频的启动Π停止方式
0 引言
通常一个步进电机的控制系统只能驱动一种类 型 (反应式步进电机或混合式步进电机) 的步进电机 或特定类型特定相数的步进电机 (如 ,三相反应式步 进电机 ,二相混合式步进电机等) 。用于驱动三相反 应式步进电机的控制系统往往是不能用来驱动混合 式步进电机的 ;用于驱动二相混合式步进电机的控 制系统往往也是不能用来驱动反应式步进电机的 。 如果要使用某种特定类型和特定相数的步进电机 , 必须要找到一种与之对应的专用的步进电机控制系 统来驱动它 。如果需要换用另外一种类型或相数的
S3C44B0X 提供了全面的 、通用片上外设 ,大大 减小了系统电路中除处理器以外的元器件配置 ,从 而使系统的体积和成本得到了最小化 。 2. 1. 2 A3955SB 步距角细分控制器
A3955S出 1. 5A 左 右的连续电流 ,工作电压可达 50V ,设有过热 ,交叉 电流保护等保护功能 ,内部脉宽调制 ( PWM) 电流控 制结合内部 3 位的非线性数模转换器将电机电流控 制在整步 ,1Π2 步 ,1Π4 步或 1Π8 步 (微步距) 的步距模 式 。非线性增量使微步距所需的控制线数目减少到 最少 。细化步进电机的步距 ,提高分辨率 ,减少转矩 脉动及低速振荡 ,使步进电机运行更平稳[2] 。 2. 2 输入与显示电路设计
基于ARM单片机的步进电机控制系统设计

关键词: 控制系统; 单片机; ARM ; 步进电机
中图分类号: TP273
文献标识码: A 文章编号: 1009-9492 (2007) 06-0071-03
1 引言
步进电机是数字控制系统中的一种重要执行元件, 广 泛应用在各种自动化控制系统和机电一体化设备中。目前 打印机、绘图仪、机器人、数控机床等设备都以步进电机 为动力核心。随着步进电机在工业控制系统中的应用不断 增加, 对步进电机的控制系统提出越来越高的要求。
综上所述, 系统对电机驱动和控制步骤如下: (1) 系 统 首 先 由 A D S1.2 作 为 软 件 开 发 工 具 , 在 线 开 发出对步进电机的控制程序, 调试运行成功以后, 再把代 码写到 S3C 44B 0X 开发板的 FLA SH 上。 (2) A R M S3C 44B 0X 发 出 脉 冲 信 号 后 , 再 由 C PLD 分 配 脉 冲 信 号 , C PLD 分 配 后 的 信 号 输 出 到 L298, 由 L298 芯片来驱动和控制电机, 其电路原理如图 2。
(3) 所要用到的表格有以下几种 ①查询表: 是预先建好的静态数据文件, 供编译程序 查询数据, 其目的是将程序与数据文件分离, 便于系统扩 展, 包括指令格式表和中间代码格式表 [6]; ②指令格式表: 是按 PLC 指令的语法特点分别存储指 令操作码、操作数代码和操作数范围, 并建立它们间的索 引关系; ③生成表: 是编译过程中产生的动态数据文件包括逻 辑出错表和中间文件数据表; ④逻辑出错表: 随源程序错误类型的不同而变化, 编 译完成后要将逻辑出错表生成系统错误文件。
步进电机的主要特性如下。 (1) 步 进 电 机 步 距 角 与 脉 冲 数 成 严 格 的 正 比 线 性 关 系, 而不受负载变化的影响。 (2) 步进电机只有周期性的误差, 步进电机运转一周 后没有累积误差。
基于ARM的步进电机控制系统130915.
《嵌入式系统》课程设计报告基于ARM的步进电机控制系统院系:机电学院学生姓名:李明专业:应用电子技术教育班级:应教101指导教师:付广春田丰庆完成时间: 2013.9.11基于ARM的步进电机控制系统一、进行课程设计的目的《嵌入式系统》课程设计为学生提供了一个理论与实践相结合的机会。
既锻炼了学生动手能力,又会加深理解学生在课堂所学习的理论知识。
通过课程设计可以将课本上的理论知识和实际应用有机的结合起来,培养学生又动脑,又动手,独立思考分析问题的能力,提高学生运用所学知识解决实际问题的综合素质。
《嵌入式系统》课程设计的主要目标是:(1)掌握构建嵌入式系统软硬件平台的基本技能;(2)具备基本嵌入式系统下C语言编程能力、嵌入式操作系统基本调试的能力;(3)了解应用嵌入式系统技术开发一套嵌入式系统设备的方法。
二、课程设计设计题目基于ARM的步进电机控制系统三、课程设计基本要求1、基本要求设计一款步进电机控制器,能实现步进电机的启动、停止、正转、反转调速,并显示速度。
尽量不采用专用的电机控制芯片,自己做驱动;2、扩展功能:可以根据自己的进度扩展其它功能。
目录1 引言 12 设计方案 12.1 设计分析 12.2 总体设计框图 12.3 步进电机驱动电路 12.4液晶显示电路 23 软件设计 33.1 程序流程图.......... (3)4 总结 3参考文献 5附录程序 61 引言步进电机是数字控制系统中的一种重要执行元件,广泛应用在各种自动化控制系统和机电一体化设备中。
目前打印机、绘图仪、机器人、数控机床等设备都可以以步进电机为动力核心。
随着步进电机在工业控制系统中的应用不断增加,对步进电机的控制系统提出了越来越高的要求。
本课程设计主要是通过STM32单片机来控制步进电机的正转、反转、启动、停止调速等控制,并且通过1602液晶显示器显示出来。
2 设计方案2.1 设计分析步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
基于ARM的步进电机细分控制
收稿日期:2006-11-02作者简介:徐祖华(1971-),男,湖北洪湖人,南华大学电气工程学院副教授.主要研究方向:电气传动控制技术.32006届本科毕业生.第20卷第4期南华大学学报(自然科学版)Vol .20No .42006年12月Journal of Nanhua University (Science and Technol ogy )Dec .2006文章编号:1673-0062(2006)04-0016-04基于AR M 的步进电机细分控制徐祖华,肖志华3,苏泽光(南华大学电气工程学院,湖南衡阳421001)摘 要:本文设计的步进电机细分控制系统,基于AR M7芯片LPC2214和专用驱动芯片L MD18245,采用“线性+正弦”波形驱动方法和电流矢量恒幅均匀旋转算法,通过AR M 控制器产生波形数据,经D /A 芯片MAX526转换成对应的控制电压,经过驱动芯片LMD18245放大,驱动两相步进电机.通过键盘输入控制信号,利用液晶显示电机的频率和细分倍数,利用uCL inux 和M iniG U I 平台进行程序设计.该系统实现了步进电机的多功能控制,得到4096细分的精确步进效果.关键词:步进电机;细分;AR M 中图分类号:T M301.2 文献标识码:BDesi gn of Stepper M otor Subdi visi on Control Syste m Based on AR MXU Zu 2hua,X I AO Zh i 2hua 3,SU Ze 2guang(School of Electrical Engineering,Nanhua University,Hengyang,Hunan 421001,China )Abstract:A stepper mot or subdivisi on contr ol syste m has been designed in this paper,which is based on AR M7chi p LPC2214and the L MD18245electrical machinery s pecial -pur pose driver chi p.The “linear +sine ”wave driver method and the electric current vec 2t or constant breadth algorith m is used in this syste m.The digital wave data is generated by AR M contr oller,which is converted t o corres ponding contr ol voltage .The voltage is enlarged by driver chi p L MD18245t o drive the t w o -phase stepper mot or .The contr ol sign is input by the keyboard,and the frequency and the subdivided multi p le are dis p layed by liquid crystal .The s oft w are based on uCL inux and M iniG U I p latfor m is designed .Multi -pur pose contr ol of the stepper mot or and 4096subdivisi on multi p le are realized in the syste m.Key words:stepper mot or;subdivisi on;AR M0 引言嵌入式微机工业控制技术是20世纪以来在计算机应用实践中产生和发展起来的非常经济实用的一种自动化技术,它集电气、机械、计算机、通信等技术于一体,具有速度快、工作方式灵活、可靠性高、信息处能力强等特点,在工业领域中已得到广泛的应用.目前国内工业控制中用的嵌入式工控设备的趋势是用16位或32位微处理器替代8位单片机[1].本设计采用32位嵌入式微处理器ARM ,将控制板、电源和被控制设备集成于一体,形成嵌入式一体化工业控制机.虽然利用AR M 只控制步进电机略显奢华,但是对于多信息的受控对象而言,AR M 的优点将凸现无疑.1 步进电机细分技术简介细分驱动技术在七十年代中期由美国学者首次提出,基本原理是将绕组中的电流细分,由常规的矩形波供电改为阶梯波供电,此时绕组中的电流将按一定的阶梯顺序上升和下降,从而将每一自然步进行细分.步进电机细分控制的本质是通过对励磁绕组中的电流控制,使步进电机合成磁.采用细分驱动技术可以改善步进电机的运行品质,减少转矩波动,抑制振荡,降低噪音,提高步距分辨率[2-5].针对两相/四相步进电机,本设计采用电流矢量恒幅均匀旋转的细分方法.细分后,A 、B 两相绕组电流对应的阶梯波.2 硬件电路设计2.1 整体设计方案通过对以传统单片机、DSP 和以AR M 为核心控制器的三种方案进行比较,选定以AR M 为核心控制器的控制方案[6],系统框图如图1所示.LPC2214控制L MD18245的运行,同时通过并口输出数据给D /A 芯片MAX526,MAX526的输出导向L MD18245,L MD18245驱动两相步进电机[7].图1 AR M 为核心的步进电机控制系统框图F i g .1 The chart of a stepper m otor subd i v isi oncon trol syste m ba sed on AR M2.2 ARM 微处理器2.2.1 LPC2214简介1991年AR M 公司成立于英国剑桥,目前基于AR M 技术的微处理器应用约占据了32位R I SC 微处理器75%以上的市场份额.由于AR M7系列芯片技术成熟,且相对于AR M9便宜,故本次设计选LPC2214.LPC2214是基于一个支持实时仿真和跟踪的32位AR M7T DM I -ST M CP U 的微控制器,并带有256kB 嵌入的高速Flash 存储器;128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟速率下运行;对代码规模有严格控制的应用可使用16位Thu mb 模式将代码规模降低超过30%,而性能损失却很小.2.2.2 AR M 复位电路的设计复位电路如图2所示,采用了带I 2C 存储器的电源监控芯片CAT1025J1-30,信号nRST 连接到LPC2214芯片的复位引脚nRESET .当复位键RST 按下时,CAT1025J I -30的nRESET 引脚立即输出复位信号,使LPC2214芯片复位.图2 AR M 复位电路F i g .2 AR M reset c i rcu it2.3 外围电路设计LPC2214的外围电路主要包括步进电机驱动电路、D /A 电路、键盘电路、显示电路、以太网网络接口电路、电源电路、电流检测电路等[8].2.3.1 步进电机驱动电路设计本设计选择NS 公司电机专用驱动芯片L MD18245,它主要由断路放大器、电流感应放大器、比较器、单稳态及保护电路等部分组成.它集成了过流保护、欠压保护、温度保护、防止死区导致短路等功能.L MD18245的DACREF 端接12位高速D /A芯片的输出端,提高了细分倍数,提高了步进电机的精度.A 相绕组驱动电路如图3所示.2.3.2 D /A 电路的设计71第20卷第4期 徐祖华等:基于AR M 的步进电机细分控制根据设计要求,选用4路12位的MAX526D /A 芯片,电压参考芯片选用MAX6325,如图4所示.采用+12V 供电,8位数据总线.数据通过两次写操作(低8位LS B ,高8位MS B )装入各输入寄存器.并通过异步装载DAC 输入信号将输入寄存器数据装入DAC 寄存器.基准电源信号REF AB (A 、B 模拟量基准输入)、REFCD (C 、D 模拟量基准输入).图3 LMA18245驱动电路Fi g .3 LM A 18245dr i ver图4 D /A 电路图F i g .4D /A c i rcu it2.3.3 键盘电路的设计为了使系统有良好的人机交互界面,特选专用的LED 驱动芯片Z LG7290.图6为键盘电路,表1为在软件部分定义的按键功能.图5中有16个按键,使用I 2C 接口的键盘,Z LG7290对键盘进行扫描.Z LG7290采用3.3V 电源,复位引脚与系统复位信号nRST 相连,当系统上电复位或手动复位是会同时复位Z LG7290.Z LG7290的键盘中断输出信号与LPC2214的中断引脚P0.30相连,当有键按下时,Z LG7290将会输出中断信号通知LPC2214.2.3.4 显示电路的设计为了加强人机交互界面的友好性,特选用TFT 液晶屏-TFT6758液晶模块.为了得到更高的数据传输率,采用16位总线接口,将I M 3和IM 0引脚接0电平,16位数据分别为DB17~DB10和DB8~DB1引脚电路连接如图6所示.2.3.5 以太网网络接口电路的设计本设计以RT L8019S 芯片为核心,电路图如图7所示.LPC2214具有外部总线接口,电路设计为16位总线方式对RT L8019AS 进行访问,即数据总线D0~D15与芯片的S D0~S D15连接,由于RT L8019AS 工作电源是5V 而LPC2214的I/O 电压为3.3V,所以需在总线上串接470Ω保护电阻.表1 在软件部分定义的按键功能Table 1 Keyboard functi onT AB (S13键)E NTER (S14键)ESC (S15键)BACK (S16键)9(S9键)0(S10键)-(S11键)SP ACE (S12键)5(S5键)6(S6键)7(S7键)8(S8键)1(S1键)2(S2键)3(S3键)4(S4键)81南华大学学报(自然科学版) 2006年12月图5 键盘电路F i g .5 Keyboard c i rcu it图6 TFT6758液晶显示电路F i g .6 li qui d cryst a l c i rcu it图7 以太网接口电路F i g .7 Ethernet i n terface c i rcu it91第20卷第4期 徐祖华等:基于AR M 的步进电机细分控制3 步进电机细分程序设计本设计是在uCL I N UX 操作系统和M I N I G U I 环境下,采用周立功公司的GP I O 、键盘、液晶显示驱动程序,用C 语言对AR M 进行编程,通过按键对步进电机进行控制.细分驱动系统的软件结构框图如图8所示,主要由主控程序、细分驱动程序、键处理程序、显示数据处理及显示驱动程序等部分组成.细分驱动主控制程序控制整个程序的流程如图9所示,主要完成程序的初始化和相关子程序的调用等.细分控制信号的输出采用ROM 查表法,即根据“线性+正弦”波形方法和电流矢量法恒幅均匀旋转法,产生波形数据,存储于ROM 中,通过查表输出符合细分倍数的数据.通过分析细分档位系数,决定跳过的地址数,实现可变步距细分.通过设定循环增量基数(档位系数),使不同的细分档位对应不同的细分步数,实现多级细分驱动,该系统最大细分步数为4096步.针对步进电机启动频率和最高频率两个参数,设计了加速和减速程序,而正反转控制是通过改变通电相序来实现的.图8 步进电机细分驱动软件结构框图F i g .8 Software chart of a stepper m otor subd i v isi on con troller图9 步进电机细分驱动子程序流程图F i g .9 Flow chart of a stepper m otor subd i v isi on dr i ver4 结束语本设计采用LPC2214控制,通过D /A 转换电路、L MD18245集成驱动芯片驱动步进电机.本文提出并实现的步进电机均匀细分驱动器,最高细分达到4096,能适应大多数中小微型步进电机的可变细分控制、较高细分步距角精度、及平滑运行等要求.细分驱动器的系统功能完善,大量新型智能集成元器件的采用,使所设计的驱动器具有体积小、细分精度高、运行功耗低、可靠性高、可维护性强等特点.系统软件基于uCL inux 和M iniG U I(下转第25页)02南华大学学报(自然科学版) 2006年12月投加复合铝铁提高了10%以上,沸石粉+壳聚糖去除有机物的效果比单独投加壳聚糖提高了13%以上.4)由于沸石对于氨氮具有良好的吸附特性,而常规的混凝过程对氨氮去除效果甚微,故沸石粉强化混凝对氨氮的去除效果随着沸石粉投加量的增加而提高,当沸石粉的投加量为50mg/L时,沸石粉与复合铝铁及壳聚糖的强化混凝对氨氮的去除率分别为23.5%和21%.参考文献:[1]严子春,王 萍,刘斐文,等.沸石-活性炭组合工艺处理微污染原水的研究[J].给水排水,2002,28(1):36-38.[2]张玉先,李宪立,张 敏,等.O3-沸石-G AC处理常州运河微污染水源水研究[J].给水排水,2002,18(11):3-7.[3]李德生,黄晓东,王占生.生物沸石反应器在微污染水源水处理中的应用[J].环境科学,2000,21(5):71 -73.[4]蒋 明,娄金生,谢水波,等.壳聚糖絮凝剂去除水源水中有机物的实验研究[J].水处理技术,2005,31(5):15-18.[5]王晓颖,金 伟,陈 艳,等.粉末状沸石去除微污染水中氨氮的研究[J].城市公用事业,2002,16(2):20 -22.(上接第20页)功能丰富,通用性强,从而使控制系统更加灵活可靠.参考文献:[1]周明安,朱光忠.步进电机驱动技术发展及现状[J].机电工程技术,2005(2):16-17.[2]雨宫好文,松井信行.控制用电机入门[M].北京:科学出版社,2000.[3]许大中,贺益康.电机控制[M].杭州:浙江大学出版社,2002.[4]邹丽新,朱桂荣.精密控制系统中步进电机的电细分技术研究[J].电子技术应用,2005(5):39-41.[5]Carrica DO,Gonz_alez S A,BenedettiM.A novel algo2rith m f or contr olling stepper mot ors at highers peed[J].Pr oc I M echE Part I:J Syste m s and Contr ol Engineering, 2003,217:359-365.[6]阮 航,刘 玉.基于AR M的嵌入式一体化工业控制机硬件系统设计[J].微计算机信息,2005(7):77 -80.[7]周立功,陈明计,陈 渝.AR M嵌入式L inux系统构建与驱动开发范例[M].北京:北京航空航天大学出版社,2006.[8]周立功.AR M嵌入式M iniG U I初步与应用开发范例[M].北京:北京航空航天大学出版社,2006.52第20卷第4期 娄 涛等:沸石粉强化混凝处理微污染水源水的试验研究。
毕业设计(论文)-基于arm的步进电机细分驱动控制设计[管理资料]
![毕业设计(论文)-基于arm的步进电机细分驱动控制设计[管理资料]](https://img.taocdn.com/s3/m/da2fa7369ec3d5bbfc0a741f.png)
基于ARM的步进电机细分驱动控制设计引言随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
本控制系统的设计,由硬件设计和软件设计两部分组成。
其中,硬件设计主要包括ARM最小系统、控制模块、步进电机驱动模块、数码显示模块等功能模块的设计,以及硬件电路在电路板上的实现。
软件设计包括主程序以及各个模块的控制程序,最终实现对步进电机转动方向及转动速度的控制,并且将步进电机的转动速度动态显示在LED数码管上。
本系统具有智能性、实用性及可靠性的特点。
一、 ARM的简介;ARM(Advanced RISC Machines)处理器是Acorn计算机有限公司面向低预算市场设计的第一款RISC微处理器。
更早称作Acorn RISC Machine。
ARM处理器本身是32位设计,但也配备16位指令集。
一般来讲比等价32位代码节省达35%,却能保留32位系统的所有优势。
ARM的Jazelle技术使Java加速得到比基于软件的Java虚拟机(JVM)高得多的性能,和同等的非Java加速核相比功耗降低80%。
CPU 功能上增加DSP指令集提供增强的16位和32位算术运算能力,提高了性能和灵活性。
ARM还提供两个前沿特性来辅助带深嵌入处理器的高集成SoC器件的调试,它们是嵌入式ICE-RT逻辑和嵌入式跟踪宏核(ETMS)系列。
:ARM处理器的三大特点是:耗电少功能强、16位/32位双指令集和合作伙伴众多。
1、体积小、低功耗、低成本、高性能;2、支持Thumb(16位)/ARM(32位)双指令集,能很好的兼容8位/16位器件;3、大量使用寄存器,指令执行速度更快;4、大多数数据操作都在寄存器中完成;5、寻址方式灵活简单,执行效率高;6、指令长度固定。
基于ARM2410平台步进电机的控制
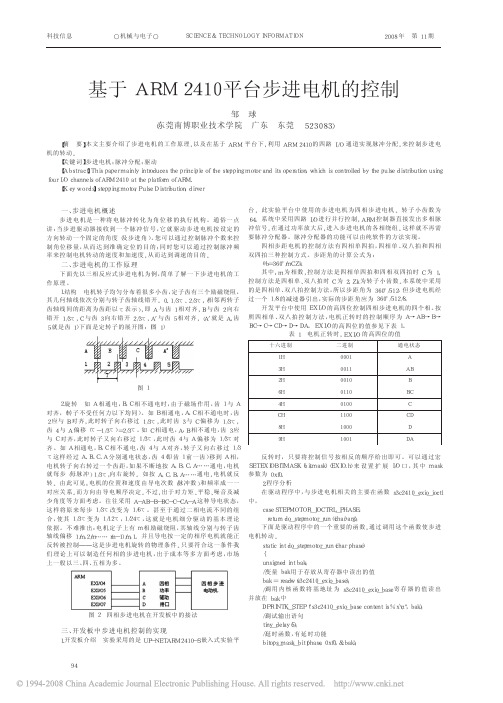
一、步进电机概述步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
二、步进电机的工作原理下面先以三相反应式步进电机为例,简单了解一下步进电机的工作原理。
1.结构电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:(图1)图12.旋转如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
不过,出于对力矩、平稳、噪音及减少角度等方面考虑。
往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。
甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。
基于ARM单片机的步进电机细分驱动设计.

科技论坛基于 ARM 单片机的步进电机细分驱动设计陈炳衡郭云龙胡清(哈尔滨理工大学电气与电子工程学院, 黑龙江哈尔滨 1500801概述步进电机作为执行元件, 能够将脉冲信号转化为角位移或线位移。
在开环状态下就能实现精确的位移控制,由于步进电机具有结构简单, 不存在控制参数设计及调试的问题, 不存在稳定性问题的特点, 在自动控制系统中得到了极为广泛的应用。
2步进电机的细分原理步进电机的细分就是利用当电机两项绕组通以相同的电流时, 电机转子会停在一个中间的位置, 而如果两相绕组电流不等, 转子位置将朝电流大的定子极方向偏移的现象, 使电机实现微步距工作方式:将两相绕组中的电流分别按正弦和余弦的轮廓呈阶梯式变化, 则每个整步距就分成了若干微步距, 因为步距小, 电机运行将更平稳。
图 1所示的是步进电机的细分原理图。
当 A 相导通时, 转子齿与 A 相对齐, 若以此为初状态, 则 B 相导通时,定子磁场旋转 90度, 吸引转子转过 1/4齿距; 依次为 A 相、 B 相、 A 相通电, 每切换一次, 定子磁场旋转 90度, 各吸引转子旋转 1/4齿距, 4步一个循环后共转过一个步距角。
如果步进电机的转子齿数为 , 那么一个齿距为 , 步距角为 (为电机运行拍数 200步后转子旋转一周。
如果在 A 、 B 两相之间插入合成向量 AB , 就实现了 2步细分。
要实现 4细分只需在 A 、 B 两相之间插入 3个向量即可。
为保证电机运行平稳、转矩不变, 电流矢量模应保持不变, 即电流矢量的终点应在矢量圆上:当插入第一步时, 如图 1中“ 1” 位置, , ; 其中 , 当插入第二步时, 如图 1中“ 2” 位置, , 。
依此类推, 当插入第 n 步时, , 。
由于多个向量的插入导致两相绕组电流不等, 转子位置将朝电流大的定子极方向偏移。
利用这个现象我们可使电机在微步距方式下工作, 将两相绕组中的电流分别按正弦和余弦的轮廓呈阶梯式变化。
基于单片机的步进电机细分控制系统
K EYW O RDS s e t ppig ot r, s n m o ubd vson d i ontol M CU i ii rve c r ,
h g c u a y s di son o t p pic ng e oft t pp n m ot r By a l i g t ub vson d ii g i cpl ft e sep ng i h a c r c ub vii fs e t h a l he s e i g o. nayzn he s di ii rv n prn i e o h t pi
b e dn tp moo r ig c i L 9 / 9 ,t e d iig c n r l y tm fse t ro wi h mo e a d c n tn u r n a ln igse t rd i n h p 2 7 2 8 h r n o to s se o tp moo fs t — d n o sa tc re tw s v v c
中图 分 类 号 :TP 3 2 文 献 标 识 码 :A
AB T S RAC S e p n t rs b i ii n t c n l g i l s d t n r a et e o e a i n l c u a y o h t ra d t c iv T t p i g mo o u d v so e h o o y i man y u e o ic e s h p r t a c r c f e mo o n O a h e e s o a t
基于单片机的步进电机细分驱动控制系统

基于单片机的步进电机细分驱动控制系统摘要:运用自趋圆算法,通过51单片机实现对步进电机的细分控制系统设计。
关键词:细分驱动;近似函数法;单片机引言步进电机是一种用电脉冲进行控制,将电脉冲信号转换成相应角位移的电机,其机械位移和转速分别与输入电机绕组的脉冲个数和脉冲频率成正比,每一个脉冲信号可使步进电机旋转一个固定的角度.脉冲的数量决定了旋转的总角度,脉冲的频率决定了电机运转的速度。
步进电机细分驱动技术是70年代中期发展起来的一种可以显著改善步进电机综合使用性能的驱动技术。
细分驱动技术的广泛应用,使得电机的相数不受步距角的限制,为产品设计带来了方便。
本文采用单片机作为控制中心设计了采用细分驱动技术的步进电机控制系统。
1.细分驱动原理与特点细分驱动的基本思想是:细分是通过驱动器精确控制步进电机的相电流实现的,与电机本身无关。
可以在每次输入脉冲切换时,不是将定子绕组电流全部通入或切除,而是只改变相应定子绕组电流的一部分,则电动机的合成磁势也只旋转步距角的一部分,转子的每步运行也只有步距角的一部分。
这里,定子绕组电流不是一个方波,而是阶梯波,定子绕组电流是台阶式的投入或切除,电流分成多少个台阶,则转子就以同样的步数转过一个步距角。
这种将一个步进角细分成若干步的驱动方法,即为细分驱动,又称微步驱动。
采用细分驱动技术有许多优点:(1)采用细分驱动技术后,在不改变步进电机整体结构的前提下,可以大幅度提高步进电机的分辨率。
(2)由于电机绕组中的电流变化幅度变小了,所以引起低频振荡的过冲能量降低了,即改善了低频性能,减小了开环运动的噪声,提高了运行稳定度。
(3)在数控系统中,加工误差难以提高的原因很大一部分是由于减速箱的存在,采用细分驱动技术后,可以采用步进电机直接同丝杠相连的形式,这样可以在很大程度上消除了由减速机构产生的回程误差及爬行等。
(4)采用细分驱动技术后,可以改善步进电机运行的矩频特性,控制频率也可相应提高。
步进电机细分控制原理及仿真分析课件
建立传感器及反馈系统的数学模型,包括位置传感器、速度传感器和电流传感器等,实现对电机运行状 态的实时监测和反馈控制。
仿真结果及分析-
电流波形分析
通过对电机电流波形的仿真 分析,得出细分控制下电机 电流的变化规律,以及电机 在不同运行状态下的电流特
征。
转矩特性分析
通过对电机转矩特性的仿真 分析,得出细分控制下电机 的转矩变化规律,以及电机 在不同运行状态下的转矩特
分控制策略实施等。
实验结果,分析这些
结果是否符合预期。
结果分析与讨论
结果分析
对上述两个实验的结果进行详细分析 ,比较它们之间的差异和相似之处。
讨论
根据分析结果,对步进电机细分控制 的原理进行深入讨论,探讨可能影响 细分控制效果的因素,以及如何优化 控制策略。
磁场控制策略
通过控制磁场来控制电机的输出力矩和转速。
3
转矩控制策略
通过控制转矩来控制电机的输出力矩和转速。
细分控制实现方法-
采用专门的细分驱动器
使用专门的细分驱动器可以将电机的相电流进行细分控制,从而实现电机的细分控制。
采用可编程逻辑控制器(PLC)
通过PLC对电机的相电流进行细分控制,从而实现电机的细分控制。
步进电机细分控制原理及仿 真分析课件
目 录
• 步进电机细分控制原理概述 • 步进电机细分控制策略及实现方法 • 步进电机细分控制仿真分析 • 步进电机细分控制实验验证及结果分析 • 总结与展望 • 参考文献
01
步进电机细分控制原 理概述
步进电机的定义与工作原理
01
步进电机是一种将电脉冲信号转 换成角位移的执行器,广泛应用 于各种开环控制系统。
未来研究方向与展望
利用ARM控制步进电机实验_LPC2000系列ARM体系结构
确定PLL设定的过程
如果一个特定的应用使用PLL,它的配置必须依照下 面的原则: (1) 选择处理器的操作频率 Fcclk 。这可以根据处理器 的整体要求、UART波特率的支持等因素来决定。记住: 外围器件的时钟频率可以低于处理器频率(见VPB分频 器描述)。 (2) 选择振荡器频率 FO S C。 Fcclk 一定是 FO S C 的整数(非 小数)倍。 (3) 计算M值以配置MSEL位。M = Fcclk / FO S C ,M的 取值范围为1~32。写入MSEL位的值为M-1。
当一个管脚选择使用外部中断功能时,对应在EXTPOLA R和EXTMODE寄存器中的位选择的电平或边沿将置位EXTI NT寄存器中的中断标志,向VIC提出中断请求,如果管脚中 断使能,将会产生中断。 向EXTINT寄存器的位EINT0~位EINT3写入1可清除相 应的外部中断标志。在电平激活方式下,只有在该管脚处于 无效状态时才能清除相应的中断标志
PLL在作为时钟源之前必须进行设置、使能并锁定。将 振荡器时钟切换到PLL输出或反过来操作时,内部电路对操 作进行同步以确保不会产生干扰。硬件不能确保PLL在连接 之前锁定或在PLL在失去锁定时自动断开连接。在PLL失去 锁定的情况下,振荡器很可能已经变得不稳定,这样断开P LL也挽救不了这种状况。
注:当某个中断在VICIntEnable中被禁能时,软件应该只改变EXTPOLA R寄存器中相应位的值。中断重新使能前,软件向EXTINT写入1来清除E XTINT位,EXTINT位可通过改变中断极性来置位。
外部中断极性寄存器
外部中断应用示例
把相应引脚设置为外部中断功能时,引脚为输入模式, 由于没有内部上拉电阻,用户需要外接一个上拉电阻,确保 引脚不会悬空。 1)设置EINT0为电平中断
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2006-11-02作者简介:徐祖华(1971- , 男, 湖北洪湖人, 南华大学电气工程学院副教授. 主要研究方向:电气传动控制技术.32006届本科毕业生. 第20卷第4期南华大学学报(自然科学版Vol . 20No . 4文章编号:1673-0062(2006 04-0016-04基于AR M 的步进电机细分控制徐祖华, 肖志华3, 苏泽光(南华大学电气工程学院, 湖南衡阳421001摘要:本文设计的步进电机细分控制系统, AR 芯片L MD18245, 采用“线性+正弦”, 通过AR M , D , 经过驱动芯片, 利用液晶显示, inux 和M iniG U I 平台进行程序设计. 该系统实现了, 得到4096细分的精确步进效果. 关键词:步进电机; 细分; AR M 中图分类号:T M301. 2文献标识码:BDesi gn of Stepper M otor Subdi visi on Control Syste m Based on AR MXU Zu 2hua, X I AO Zh i 2hua 3, SU Ze 2guang(School of Electrical Engineering, Nanhua University, Hengyang, Hunan 421001, China Abstract:A stepper mot or subdivisi on contr ol syste m has been designed in this paper, which is based on AR M7chi p LPC2214and the L MD18245electrical machinery s pecial -pur pose driver chi p. The “linear +sine ”wave driver method and the electric current vec 2t or constant breadth algorith m is used in this syste m. The digital wave data is generated by AR M contr oller,which is converted t o corres ponding contr ol voltage .The voltage is enlarged by driver chi p L MD18245t o drive the t w o -phase stepper mot or . The contr ol sign is input by the keyboard, and the frequency and the subdivided multi p le are dis p layed by liquid crystal . The s oft w are based on uCL inux and M iniG U I p latfor m is designed . Multi -pur pose contr ol of the stepper mot or and4096subdivisi on multi p le are realized in the syste m. Key words:stepper mot or; subdivisi on; AR M0引言嵌入式微机工业控制技术是20世纪以来在计算机应用实践中产生和发展起来的非常经济实用的一种自动化技术, 它集电气、机械、计算机、通信等技术于一体, 具有速度快、工作方式灵活、可靠性高、信息处能力强等特点, 在工业领域中已得到广泛的应用. 目前国内工业控制中用的嵌入式工控设备的趋势是用16位或32位微处理器替代8位单片机[1]. 本设计采用32位嵌入式微处理器ARM , 将控制板、电源和被控制设备集成于一体, 形成嵌入式一体化工业控制机. 虽然利用AR M 只控制步进电机略显奢华, 但是对于多信息的受控对象而言, AR M 的优点将凸现无疑.1步进电机细分技术简介细分驱动技术在七十年代中期由美国学者首次提出, 基本原理是将绕组中的电流细分, 由常规的矩形波供电改为阶梯波供电, 此时绕组中的电流将按一定的阶梯顺序上升和下降, 从而将每一自然步进行细分. , . , 减少转矩波动, 抑制振荡, 降低噪音, 提高步距分辨率[2-5].针对两相/四相步进电机, 本设计采用电流矢量恒幅均匀旋转的细分方法. 细分后, A 、B 两相绕组电流对应的阶梯波.2硬件电路设计2. 1整体设计方案通过对以传统单片机、DSP 和以AR M 为核心控制器的三种方案进行比较, 选定以AR M 为核心控制器的控制方案[6], 系统框图如图1所示. LPC2214控制L MD18245的运行, 同时通过并口输出数据给D /A芯片MAX526,MAX526的输出导向L MD18245,L MD18245驱动两相步进电机[7].图1AR M 为核心的步进电机控制系统框图F i g . 1The chart of a stepper m otor subd i v isi oncon trol syste m ba sed on AR M2. 2ARM 微处理器2. 2. 1LPC2214简介1991年AR M 公司成立于英国剑桥, 目前基于AR M 技术的微处理器应用约占据了32位R I SC 微处理器75%以上的市场份额. 由于AR M7系列芯片技术成熟, 且相对于AR M9便宜, 故本次设计选LPC2214.LPC2214是基于一个支持实时仿真和跟踪的32位AR M7T DM I -ST M CP U 的微控制器, 并带有256kB 嵌入的高速Flash 存储器; 128位宽度的存储器接口和独特的加速结构使32位代码能够在最大时钟速率下运行; 对代码规模有严格控制的应用可使用16位Thu mb 模式将代码规模降低超过30%, 而性能损失却很小. 2. 2. 2M I 2C 存储器-30, 信号nRST 连接芯片的复位引脚nRESET . 当复位键RST 按下时, CAT1025J I -30的nRESET 引脚立即输出复位信号, 使LPC2214芯片复位.图2AR M 复位电路F i g . 2AR M reset c i rcu it2. 3外围电路设计LPC2214的外围电路主要包括步进电机驱动电路、D /A电路、键盘电路、显示电路、以太网网络接口电路、电源电路、电流检测电路等[8].2. 3. 1步进电机驱动电路设计本设计选择NS 公司电机专用驱动芯片L MD18245, 它主要由断路放大器、电流感应放大器、比较器、单稳态及保护电路等部分组成. 它集成了过流保护、欠压保护、温度保护、防止死区导致短路等功能.L MD18245的DACREF 端接12位高速D /A芯片的输出端, 提高了细分倍数, 提高了步进电机的精度. A 相绕组驱动电路如图3所示. 2. 3. 2 D /A电路的设计71第20卷第4期徐祖华等:基于AR M 的步进电机细分控制根据设计要求, 选用4路12位的MAX526D /A芯片, 电压参考芯片选用MAX6325, 如图4所示. 采用+12V 供电, 8位数据总线. 数据通过两次写操作(低8位LS B , 高8位MS B 装入各输入寄存器. 并通过异步装载DAC 输入信号将输入寄存器数据装入DAC 寄存器. 基准电源信号REF AB(A 、B 模拟量基准输入、REFCD (C 、D 模拟量基准输入. 3Fi g . i ver图4 D /A电路图F i g . 4D /Ac i rcu it2. 3. 3键盘电路的设计为了使系统有良好的人机交互界面, 特选专用的LED 驱动芯片Z LG7290. 图6为键盘电路, 表1为在软件部分定义的按键功能. 图5中有16个按键, 使用I 2C 接口的键盘, Z LG7290对键盘进行扫描. Z LG7290采用3. 3V 电源, 复位引脚与系统复位信号nRST 相连, 当系统上电复位或手动复位是会同时复位Z LG7290. ZLG7290的键盘中断输出信号与LPC2214的中断引脚P0. 30相连, 当有键按下时, Z LG7290将会输出中断信号通知LPC2214. 2. 3. 4显示电路的设计为了加强人机交互界面的友好性, 特选用TFT 液晶屏-TFT6758液晶模块. 为了得到更高的数据传输率, 采用16位总线接口, 将I M 3和IM 0引脚接0电平, 16位数据分别为DB17~DB10和DB8~DB1引脚电路连接如图6所示. 2. 3. 5以太网网络接口电路的设计本设计以RT L8019S 芯片为核心, 电路图如图7所示. LPC2214具有外部总线接口, 电路设计为16位总线方式对RT L8019AS 进行访问, 即数据总线D0~D15与芯片的S D0~S D15连接, 由于RT L8019AS 工作电源是5V 而LPC2214的I/O电压为3. 3V, 所以需在总线上串接470Ω保护电阻.表1在软件部分定义的按键功能Table 1Keyboard functi onT AB (S13键 E NTER (S14键 ESC (S15键 BACK (S16键 9(S9键 0(S10键 -(S11键 SP ACE (S12键 5(S5键 6(S6键 7(S7键 8(S8键 1(S1键2(S2键3(S3键4(S4键81南华大学学报(自然科学版2006年12月图5键盘电路F i g . 5Keyboard c i rcuit图6TFT6758液晶显示电路F i g . 6li qu i d cryst a l c i rcuit图7以太网接口电路F i g . 7Ethernet i n terface c i rcu it91第20卷第4期徐祖华等:基于AR M 的步进电机细分控制3步进电机细分程序设计本设计是在uCL I N UX 操作系统和M I N I G U I 环境下, 采用周立功公司的GP I O 、键盘、液晶显示驱动程序, 用C 语言对AR M 进行编程, 通过按键对步进电机进行控制.细分驱动系统的软件结构框图如图8所示, 主要由主控程序、细分驱动程序、键处理程序、显示数据处理及显示驱动程序等部分组成. 细分驱动主控制程序控制整个程序的流程如图9所示, 主要完成程序的初始化和相关子程序的调用等.细分控制信号的输出采用ROM 查表法, 即根据“线性+正弦”波形方法和电流矢量法恒幅均匀旋转法, 产生波形数据, 存储于ROM 中, 通过查表输出符合细分倍数的数据. 档位系数,, 分. 通过设定循环增量基数(档位系数 , 使不同的细分档位对应不同的细分步数, 实现多级细分驱动, 该系统最大细分步数为4096步. 针对步进电机启动频率和最高频率两个参数, 设计了加速和减速程序, 而正反转控制是通过改变通电相序来实现的.图otor i con troller图9步进电机细分驱动子程序流程图F i g . 9Flow chart of a stepper m otor subd i v isi on dr i ver4结束语本设计采用LPC2214控制, 通过D /A转换电路、L MD18245集成驱动芯片驱动步进电机. 本文提出并实现的步进电机均匀细分驱动器, 最高细分达到4096, 能适应大多数中小微型步进电机的可变细分控制、较高细分步距角精度、及平滑运行等要求. 细分驱动器的系统功能完善, 大量新型智能集成元器件的采用, 使所设计的驱动器具有体积小、细分精度高、运行功耗低、可靠性高、可维护性强等特点. 系统软件基于uCL inux 和M iniG U I(下转第25页02南华大学学报(自然科学版2006年12月第 20 卷第 4 期娄涛等 : 沸石粉强化混凝处理微污染水源水的试验研究 25 投加复合铝铁提高了 10%以上 ,沸石粉 +壳聚糖去除有机物的效果比单独投加壳聚糖提高了 13%以上 . 4 由于沸石对于氨氮具有良好的吸附特性 , 而常规的混凝过程对氨氮去除效果甚微 , 故沸石粉强化混凝对氨氮的去除效果随着沸石粉投加量的增加而提高 ,当沸石粉的投加量为 50 mg /L 时 , 沸石粉与复合铝铁及壳聚糖的强化混凝对氨氮的去除率分别为 23. 5%和 21%. 参考文献 : [ 1 ] 严子春 ,王 ,刘斐文 , 等 .沸石 - 活性炭组合工艺萍 36 - 38. [ 2 ] 张玉先 ,李宪立 ,张 ,等 . O3 - 沸石 - GAC 处理常敏州运河微污染水源水研究 [ J ]. 给水排水 , 2002, 18 ( 11 : 3 - 7. [ 3 ] 李德生 ,黄晓东 , 王占生 . 生物沸石反应器在微污染水源水处理中的应用 [ J ]. 环境科学 , 2000, 21 ( 5 : 71 - 73. [ 4 ] 蒋 ,娄金生 ,谢水波 , 等 . 壳聚糖絮凝剂去除水源明水中有机物的实验研究 [ J ]. 水处理技术 , 2005, 31 (5 : 15 - 18. [ 5 ] 王晓颖 ,金 ,陈 , 等 . 粉末状沸石去除微污染伟艳水中氨氮的研究 [ J ]. 城市公用事业 , 2002, 16 ( 2 : 20 - 22. 处理微污染原水的研究 [ J ]. 给水排水 , 2002, 28 ( 1 : (上接第 20 页功能丰富 ,通用性强 ,从而使控制系统更加灵活可靠. 参考文献 : [ 1 ] 周明安 ,朱光忠 . 步进电机驱动技术发展及现状 [ J ]. 机电工程技术 , 2005 (2 : 16 - 17. [ 2 ] 雨宫好文 ,松井信行 . 控制用电机入门 [M ]. 北京 : 科学出版社 , 2000. [ 3 ] 许大中 ,贺益康 . 电机控制[M ]. 杭州 : 浙江大学出版社 , 2002. [ 4 ] 邹丽新 ,朱桂荣 . 精密控制系统中步进电机的电细分技术研究 [ J ]. 电子技术应用 , 2005 ( 5 : 39 - 41. 1994-2007 China Academic Journal Electronic Publishing House. All rights reserved. [ 5 ] Carrica DO , Gonz_alez SA , BenedettiM. A novel algo2 rithm for controlling stepper motors at higherspeed [ J ]. Proc I echE Part I: J System s and Control Engineering, M 2003, 217: 359 - 365. [ 6 ] 阮 ,刘 . 基于 ARM 的嵌入式一体化工业控航玉 - 80. 制机硬件系统设计 [ J ]. 微计算机信息 , 2005 ( 7 : 77 [ 7 ] 周立功 , 陈明计 , 陈 . ARM 嵌入式 L inux 系统构渝建与驱动开发范例 [M ]. 北京 : 北京航空航天大学出版社 , 2006. [ 8 ] 周立功 . ARM 嵌入式 M iniGU I初步与应用开发范例 [M ]. 北京 : 北京航空航天大学出版社 , 2006. 。