基于Android平台相机开发技术的研究
如何使用Android的硬件加速和图像渲染优化进行游戏开发(十)
如何使用Android的硬件加速和图像渲染优化进行游戏开发Android平台的游戏开发一直是开发者们热衷的领域。
而Android 的硬件加速和图像渲染优化正是提升游戏性能的关键。
本文将从游戏开发的角度,探讨如何充分利用Android平台提供的硬件加速和图像渲染优化技术,从而提升游戏的性能和用户体验。
一、硬件加速技术在Android游戏开发中的应用硬件加速是指通过利用硬件资源来加速图像渲染和绘制过程,从而提高游戏的帧率和响应速度。
在Android平台上,硬件加速技术主要依赖于OpenGL ES(OpenGL for Embedded Systems)库。
通过使用OpenGL ES库,开发者可以直接与GPU(图形处理器)进行交互,而不必再通过CPU来进行图像渲染和图形计算。
这种方式能够显著提高游戏的渲染性能。
在使用硬件加速技术进行游戏开发时,首先需要在游戏的XML布局文件中,将根布局的硬件加速属性设置为true。
这样可以确保整个游戏界面都能够受到硬件加速的支持。
同时,还需要在游戏的Activity类中,通过调用setLayerType方法来启用硬件加速。
这样就可以确保游戏在进行图像渲染时能够充分利用硬件加速的优势。
除了启用硬件加速,还可以通过使用OpenGL ES库,结合使用纹理映射(Texture Mapping)和着色器(Shader)等技术,来提升游戏的图像质量和渲染效果。
通过使用纹理映射,可以将图像贴图到游戏物体的表面上,使其更加真实和生动。
而通过使用着色器,可以对游戏物体的颜色、光照和阴影等进行细致的控制,从而提升游戏的视觉效果。
二、图像渲染优化技术在Android游戏开发中的应用在Android平台上,图像渲染优化技术主要包括如下几个方面:纹理压缩、图像裁剪、视区剔除和LOD(Level of Detail)技术。
纹理压缩是指在游戏中使用压缩格式的纹理,从而减少纹理的内存占用和加载时间。
妙鸭相机源代码

妙鸭相机源代码
(实用版)
目录
1.妙鸭相机简介
2.妙鸭相机的源代码
3.妙鸭相机源代码的应用
4.结论
正文
1.妙鸭相机简介
妙鸭相机是一款受到许多用户喜爱的相机应用。
它具有界面简洁、操作便捷、功能丰富等特点,可以满足用户在拍照、录像等场景下的需求。
不仅如此,妙鸭相机还具备强大的滤镜功能,可以让用户在拍摄过程中轻松实现各种特效,让照片更加有趣。
2.妙鸭相机的源代码
妙鸭相机的源代码是基于 Android 平台编写的。
它主要由以下几个部分组成:
(1)主界面:包括拍照、录像、相册、设置等功能按钮,用户可以通过点击这些按钮快速进入相应功能界面。
(2)滤镜界面:提供了多种滤镜效果,用户可以在拍照或录像过程中实时预览并选择合适的滤镜。
(3)设置界面:包括相机参数设置、保存路径设置、权限管理等功能,用户可以在这里对相机进行个性化设置。
(4)拍照和录像功能:实现了拍照和录像的基本功能,同时支持预览、闪光灯控制、拍照声音开关等操作。
3.妙鸭相机源代码的应用
通过对妙鸭相机源代码的研究,开发者可以了解到相机应用的实现原理,从而更好地进行功能优化和改进。
此外,源代码还可以作为学习Android 开发的教程,帮助开发者掌握相关技术。
4.结论
妙鸭相机作为一款优秀的相机应用,其源代码对于学习和研究Android 开发具有一定的参考价值。
安卓手机单目相机测距方案研究

安卓手机单目相机测距方案研究佚名【摘要】针对基于计算机视觉的安卓手机单目相机测距所面临的初始化尺度难题,提出使用步行者航迹推算算法进行尺度初始化的方案,并完成测距系统的设计与实现.该系统还融合了对极几何算法、捷联式惯性导航和步行者航迹推算算法,有效的在三角测量模型中对两位置的相机姿态进行初始化和边长估计达到测距目的.最后,通过重投影误差进行优化,增加测量精度.该研究一方面,另辟蹊径的提出步行者航迹推算进行尺度初始化的方案;另一方面,应用此方案的测距系统具有,使用简单、快速,且在小规模场景下测距精度高的优点.【期刊名称】《电子设计工程》【年(卷),期】2019(027)002【总页数】5页(P47-51)【关键词】安卓手机;三角测量;对极几何;捷联式惯性导航;步行者航迹推算;重投影误差【正文语种】中文【中图分类】TN919.8近年,利用手机相机、陀螺仪、加速度计等惯性传感器实现视觉SLAM(基于视觉的同步定位与建图)系统成为了研究热点。
手机测距与该研究异曲同工,两者的共同点在于,都需要对手机姿态估计、尺度初始化和建立真实三维模型;不同点在于,手机测距单次测量运行的时间短,重建点云的规模远小于SLAM,测量精度也没有SLAM严格。
根据手机测距具备的特征,系统应具备使用方便、快捷、误差在可接受范围内、计算资源消耗少的特点。
目前主要有3种手机测距方案。
第一,根据参照物测距[7,24]。
需要识别画面中已知大小的物体,根据画面中所识别物体与真实物体的缩放比例进行距离估计。
该方案存在较大的局限,只能识别已经训练好的物体,且计算量较大。
第二,利用手机惯性传感器进行步长估计[8]的测距方案。
测距时需要走到待测目标位置,同时利用零速修正,积分求解距离。
不支持不可到达目标的测距。
第三,利用两台固定的相机拍摄[19-20]多张照片构建三维图像获取目标距离,即手机版本的三角定位。
优点是精度高;缺点是使用复杂,需要携带其他外设。
android 高斯模糊方法

android 高斯模糊方法高斯模糊,又称高斯平滑,是一种广泛应用于图像处理、计算机视觉和移动开发领域的图像处理方法。
它通过在图像上应用一种线性滤波器,使得图像更加平滑、柔和,减少噪声和细节,从而达到美颜、模糊背景等效果。
在Android平台上,高斯模糊同样受到广泛关注,下面我们将介绍如何在Android中实现高斯模糊。
1.高斯模糊的原理与应用高斯模糊基于高斯核对图像进行卷积运算。
核的大小决定了模糊的程度,核越小,模糊效果越明显;核越大,模糊效果越弱。
高斯模糊广泛应用于摄影、图像处理、人脸识别等领域,可以降低图像噪声、增强图像对比度、实现背景模糊等。
2.Android中实现高斯模糊的方法在Android平台上,有多种方法可以实现高斯模糊。
以下我们将介绍两种常用的方法:(1)使用Android内置的画廊应用模糊图片:Android系统内置的画廊应用支持高斯模糊功能。
只需将需要模糊的图片导入画廊,然后调整图片的透明度,即可实现高斯模糊效果。
(2)使用第三方库:有许多优秀的第三方库提供了高斯模糊功能,如CameraEffect、GaussianBlur等。
以GaussianBlur为例,首先在项目的build.gradle文件中添加依赖:```implementation "com.github.john.android:GaussianBlur:2.1.0"```然后在你的Activity中使用:```javaGaussianBlurManager manager = new GaussianBlurManager();Bitmap bitmap = Bitmap.createBitmap(width, height,Bitmap.Config.ARGB_8888);manager.blur(bitmap, new Rect(x, y, width, height), newSize(kernelSize, kernelSize), blurMode);```3.常用的高斯模糊库和滤镜(1)GaussianBlur:一个简单易用的Android高斯模糊库,支持在线模糊和离线模糊两种模式,可自定义核大小和模糊模式。
移动设备上USB摄像头的功能实现方法
移动设备上USB摄像头的功能实现方法研究摘要:针对android操作系统下无法使用usb摄像头进行预览和拍摄的问题,提出了在硬件抽象层编写代码进行实现的方法,实现了usb摄像头的正常取景预览和拍摄功能。
在深入研究v4l2规范的基础上,对图像采集驱动uvc进行配置,而后在android系统的硬件抽象层编写了基于v4l2规范的图像采集程序,实现了android操作系统下usb接口摄像头的预览和拍摄功能。
实验测试结果表明,该方法可以获得稳定流畅的拍摄预览效果,并拍摄得到优质清晰的图像。
关键词: usb摄像头;video for linux 2编程;硬件抽象层;色彩空间转换中途分类号:tu-024 文献标识码:a文章编号:0 前言基于android操作系统的嵌入式平台,凭借其开放性、友好的用户界面、优秀的多任务处理能力、强大的多媒体应用,已成为众多嵌入式系统应用平台和移动设备开发平台中的佼佼者。
android操作系统对usb总线接口热插拔的支持非常完善,但对usb摄像头缺乏必要的应用支持。
然而,usb接口具有数据传输速率快、可扩展性好和维护方便等优点[1],usb摄像头可动态连接并延伸一定距离安装,使之非常适合于工业现场监控、图像采集和机器视觉等方面的应用。
为了解决基于android操作系统的嵌入式系统平台中usb摄像头的应用问题,本文在深入研究了android系统中camera的原理机制和视频设备驱动v4l2标准的基础上,对图像采集驱动uvc进行了配置,编写了基于v4l2的图像采集程序,在硬件抽象层下完成了图像预览及拍摄功能的设计,实现了android操作系统usb接口摄像头取景预览和拍摄功能。
为工业现场监控、图像采集和机器视觉等使用usb摄像头的应用,提供了一种实现取景预览和拍摄功能的方法。
1 开发环境简介嵌入式系统的开发环境称为交叉式开发环境,所有开发工作在宿主机上完成,产生的代码则运行在目标机上。
Android使用系统相机进行拍照的步骤

Android使⽤系统相机进⾏拍照的步骤前⾔我们在⽇常的开发中有时候会遇到需要⽤到相机的需求,⽽相机也是很常⽤的东西,例如扫⼆维码啊拍照上传啊等等。
这⾥我不讲像qq那样⾃定义很强的拍照功能(事实上我也不会),讲个最简单的调⽤系统相机拍照并储存调⽤系统相机步骤这⾥我通过⼀个简单的例⼦来讲这个内容。
我⾃⼰写了⼀个demo,布局很简单:<Buttonandroid:id="@+id/button"android:layout_width="wrap_content"android:layout_height="wrap_content"android:layout_marginTop="4dp"android:text="take phone"app:layout_constraintEnd_toEndOf="parent"app:layout_constraintHorizontal_bias="0.281"app:layout_constraintStart_toStartOf="parent"app:layout_constraintTop_toTopOf="parent" /><ImageViewandroid:id="@+id/imageView"android:layout_width="wrap_content"android:layout_height="wrap_content"android:layout_marginTop="29dp"app:layout_constraintEnd_toEndOf="parent"app:layout_constraintStart_toStartOf="parent"app:layout_constraintTop_toBottomOf="@+id/button"app:srcCompat="@mipmap/ic_launcher_round" />就是⼀个按钮点击弹起相机,然后⼀个imageView显⽰拍到的照⽚。
【Android】AndroidCamera实时数据采集及通过MediaCodec硬编码编。。。

【Android】AndroidCamera实时数据采集及通过MediaCodec硬编码编。
吐槽: 其实常⽤流程都差不多,但是有时候还是会忘记某⼀步的详细⽤法,但是各位朋友请注意,官⽅已经不推荐Camera类的使⽤(现在是android.hardware.camera2),但⽆奈公司项⽬之前是使⽤Camera类实现的,并且Camera2貌似是基于API 21以上的,这Android 7的风声都放出来了,可是6.0现在出了3个多⽉了市场占有率也才貌似3%不到,什么时候才能有个标准化和统⼀规范,作为⼀名Android开发者实属不易啊,叹⽓~Android实现摄像头实时数据采集及通过硬编码编码数据的流程:/** 编码器获取数据,编码,编码后的数据的处理等⼤致流程如下:*//* 1.获取原始帧 */@OverrideonPreviewFrame( byte[] onPreviewData, Camera camera) {/* 在此可以对onPreviewData进⾏Rotate或者Scale* 也可以转换yuv的格式,例如yuv420P(YV12)或者yuv420SP(NV21/NV12)* 相关开源类库可以使⽤libyuv/ffmpeg等*/getRawFrame(onPreviewData)/* 然后将onPreviewData加⼊Camera回调*/addCallbackBuffer(onPreviewData);}private void getRawFrame( byte[] rawFrame ) { encodFrame(rawFrame); }/* 2.进⾏编码 */private byte[] encodFrame(byte[] inputData) { return encodedData; }/* 3.取得编码后的数据便可进⾏相应的操作,可以保存为本地⽂件,也可进⾏推流 */Operation ? Send(byte[] sendData) : Save(byte[] saveData)上述代码onPreviewFrame为Camera类的接⼝,使⽤Camera前需要进⾏SurfaceView及SurfaceHolder的初始化及相应interface的实现:// init the preview surfaceprivate void initview() {SurfaceView surfaceView = (SurfaceView) findViewById(R.id.record_surface);SurfaceHolder surfaceHolder = surfaceView.getHolder();surfaceHolder.addCallback(this);surfaceHolder.setType(SurfaceHolder.SURFACE_TYPE_PUSH_BUFFERS);}@Overridepublic void surfaceCreated(SurfaceHolder holder) {openCamera(holder); // 开启相机}@Overridepublic void surfaceChanged(SurfaceHolder holder, int format, int width, int height) {}@Overridepublic void surfaceDestroyed(SurfaceHolder holder) {releaseCamera(); // 在surfaceDestroyed的时候记得releaseCamera}private void openCamera(SurfaceHolder holder) {releaseCamera();try {camera = getCamera(Camera.CameraInfo.CAMERA_FACING_BACK); // 根据需求选择前/后置摄像头} catch (Exception e) {camera = null;if (AppContext.isDebugMode) {e.printStackTrace();}}if(mCamera != null){try {mCamera.setPreviewCallback(this);mCamera.setDisplayOrientation(90); // 此⽅法为官⽅提供的旋转显⽰部分的⽅法,并不会影响onPreviewFrame⽅法中的原始数据;if(parameters == null){parameters = mCamera.getParameters();}parameters.setPreviewFormat(ImageFormat.NV21); // 常⽤格式:NV21 / YV12parameters.setPreviewSize(width, height); // 还可以设置很多相机的参数,但是建议先遍历当前相机是否⽀持该配置,不然可能会导致出错;mCamera.setParameters(parameters);mCamera.setPreviewDisplay(holder);mCamera.startPreview();} catch (IOException e) {e.printStackTrace();}}}@TargetApi(9)private Camera getCamera(int cameraType) {Camera camera = null;try {camera = Camera.open(cameraType);} catch (Exception e) {e.printStackTrace();}return camera; // returns null if camera is unavailable}private synchronized void releaseCamera() {if (camera != null) {try {camera.setPreviewCallback(null);} catch (Exception e) {e.printStackTrace();}try {camera.stopPreview();} catch (Exception e) {e.printStackTrace();}try {camera.release();} catch (Exception e) {e.printStackTrace();}camera = null;}}MediaCodec硬编码实现部分:此处推荐参考SRS开源项⽬中的实现⽅法:// video device.private Camera camera;private MediaCodec vencoder;private MediaCodecInfo vmci;private MediaCodec.BufferInfo vebi;private byte[] vbuffer;// video camera settings.private Camera.Size vsize;private int vcolor;private int vbitrate_kbps = 300;private final static int VFPS = 20;private final static int VGOP = 5;private final static int VWIDTH = 640;private final static int VHEIGHT = 480;/* ⾸先需要初始化MediaCodec的配置 */private void initMediaCodec() {// choose the right vencoder, perfer qcom then google.vcolor = chooseVideoEncoder();// vencoder yuv to 264 es stream.// requires sdk level 16+, Android 4.1, 4.1.1, the JELLY_BEANtry {vencoder = MediaCodec.createByCodecName(vmci.getName());} catch (IOException e) {Log.e(TAG, "create vencoder failed.");e.printStackTrace();return;}vebi = new MediaCodec.BufferInfo();// setup the vencoder.// @see https:///reference/android/media/MediaCodec.htmlMediaFormat vformat = MediaFormat.createVideoFormat(MediaFormat.MIMETYPE_VIDEO_AVC, vsize.width, vsize.height); vformat.setInteger(MediaFormat.KEY_COLOR_FORMAT, vcolor);vformat.setInteger(MediaFormat.KEY_MAX_INPUT_SIZE, 0);vformat.setInteger(MediaFormat.KEY_BIT_RATE, 1000 * vbitrate_kbps);vformat.setInteger(MediaFormat.KEY_FRAME_RATE, VFPS);vformat.setInteger(MediaFormat.KEY_I_FRAME_INTERVAL, VGOP);Log.i(TAG, String.format("vencoder %s, color=%d, bitrate=%d, fps=%d, gop=%d, size=%dx%d",vmci.getName(), vcolor, vbitrate_kbps, VFPS, VGOP, vsize.width, vsize.height));// the following error can be ignored:// 1. the storeMetaDataInBuffers error:// [OMX.qcom.video.encoder.avc] storeMetaDataInBuffers (output) failed w/ err -2147483648// @see /mediacodec/#q12vencoder.configure(vformat, null, null, MediaCodec.CONFIGURE_FLAG_ENCODE);vencoder.start();}// for the vbuffer for YV12(android YUV), @see below://https:///reference/android/hardware/Camera.Parameters.html#setPreviewFormat(int)//https:///reference/android/graphics/ImageFormat.html#YV12private int getYuvBuffer(int width, int height) {// stride = ALIGN(width, 16)int stride = (int) Math.ceil(width / 16.0) * 16;// y_size = stride * heightint y_size = stride * height;// c_stride = ALIGN(stride/2, 16)int c_stride = (int) Math.ceil(width / 32.0) * 16;// c_size = c_stride * height/2int c_size = c_stride * height / 2;// size = y_size + c_size * 2return y_size + c_size * 2;}// choose the video encoder by name.private MediaCodecInfo chooseVideoEncoder(String name, MediaCodecInfo def) {int nbCodecs = MediaCodecList.getCodecCount();for (int i = 0; i < nbCodecs; i++) {MediaCodecInfo mci = MediaCodecList.getCodecInfoAt(i);if (!mci.isEncoder()) {continue;}String[] types = mci.getSupportedTypes();for (int j = 0; j < types.length; j++) {if (types[j].equalsIgnoreCase(VCODEC)) {//Log.i(TAG, String.format("vencoder %s types: %s", mci.getName(), types[j]));if (name == null) {return mci;}if (mci.getName().contains(name)) {return mci;}}}}return def;}// choose the right supported color format. @see below://https:///reference/android/media/MediaCodecInfo.html//https:///reference/android/media/MediaCodecInfo.CodecCapabilities.htmlprivate int chooseVideoEncoder() {// choose the encoder "video/avc":// 1. select one when type matched.// 2. perfer google avc.// 3. perfer qcom avc.vmci = chooseVideoEncoder(null, null);//vmci = chooseVideoEncoder("google", vmci);//vmci = chooseVideoEncoder("qcom", vmci);int matchedColorFormat = 0;MediaCodecInfo.CodecCapabilities cc = vmci.getCapabilitiesForType(VCODEC);for (int i = 0; i < cc.colorFormats.length; i++) {int cf = cc.colorFormats[i];Log.i(TAG, String.format("vencoder %s supports color fomart 0x%x(%d)", vmci.getName(), cf, cf));// choose YUV for h.264, prefer the bigger one.// corresponding to the color space transform in onPreviewFrameif ((cf >= cc.COLOR_FormatYUV420Planar && cf <= cc.COLOR_FormatYUV420SemiPlanar)) {if (cf > matchedColorFormat) {matchedColorFormat = cf;}}}for (int i = 0; i < cc.profileLevels.length; i++) {MediaCodecInfo.CodecProfileLevel pl = cc.profileLevels[i];Log.i(TAG, String.format("vencoder %s support profile %d, level %d", vmci.getName(), pl.profile, pl.level));}Log.i(TAG, String.format("vencoder %s choose color format 0x%x(%d)", vmci.getName(), matchedColorFormat, matchedColorFormat));return matchedColorFormat;} 上述代码为SRS的部分实现,仅作参考。
基于Android平台软件开发方法的研究与应用

基于Android平台软件开发方法的研究与应用一、概述随着移动互联网的飞速发展,智能手机已成为人们日常生活中不可或缺的一部分。
作为智能手机的主要操作系统之一,Android凭借其开放源代码、多样化的设备选择和丰富的应用资源,在全球范围内占据了主导地位。
研究和应用基于Android平台的软件开发方法具有重大的现实意义和广阔的发展前景。
本文旨在探讨基于Android平台的软件开发方法,包括需求分析、设计、编码、测试等各个阶段的关键技术和实践策略。
通过对现有研究文献的梳理和案例分析,本文将深入分析Android平台的架构特点、开发环境、编程语言、常用框架和工具,以及在此基础上的软件开发流程和最佳实践。
本文还将关注Android软件开发中的性能优化、安全性保障和用户体验提升等关键问题,提出相应的解决方案和改进措施。
通过本文的研究,旨在为从事Android软件开发的工程师、研究人员和爱好者提供有益的参考和指导,推动Android软件开发技术的不断发展和创新应用。
1.1 背景介绍随着信息技术的飞速发展,智能手机已经成为人们日常生活中不可或缺的一部分。
作为智能手机的主要操作系统之一,Android平台在全球范围内拥有庞大的用户群体和广阔的应用市场。
在这样的背景下,基于Android平台的软件开发方法和技术显得尤为重要。
Android软件开发不仅涉及到编程语言的学习和应用,还包括界面设计、数据存储、网络通信等多个方面。
随着用户需求的不断变化和技术的持续进步,传统的软件开发方法已经无法满足现代Android 应用的高效、安全和用户体验等方面的要求。
研究基于Android平台的软件开发方法,对于提升应用的质量、性能和用户体验具有重要意义。
同时,随着移动互联网的普及和深入,Android应用已经渗透到各个领域,如教育、医疗、娱乐等。
这些领域对Android应用的需求各不相同,要求开发者具备针对不同需求进行定制开发的能力。
基于Android的移动应用开发研究_胡忠望
基于Android的移动应用开发研究胡忠望,莫家庆(肇庆学院计算机学院,广东肇庆526061)摘 要:基于Android的移动应用开发成为软件开发热点。
探讨Android应用开发方法,包括Android应用程序的架构,应用开发的指导原则、实现技术手段、基本流程;应用开发技术学习路线;应用程序发布技术。
所述的过程论和方法论具有理论系统性和工程实践基础。
关键词:软件开发;移动应用开发;Android应用开发DOI:10.11907/rjdk.中图分类号:TP301 文献标识码:A 文章编号:1672-7800(2014)011-0018-03基金项目:国家自然科学基金资助项目(61379041)作者简介:胡忠望(1965-),男,湖南常德人,肇庆学院计算机学院教授,研究方向为网络与信息安全、移动计算;莫家庆(1973-),男,广东肇庆人,肇庆学院计算机学院副教授,研究方向为网络与信息安全、移动计算。
1 Android体系结构与开发环境架构对Android体系结构的分析能够帮助开发者把握全局,形成Android开发完整的知识体系,为开发打下良好的理论基础。
Android体系结构分为4层,从高到低分别是Applications layer、Application Framework layer、Li-braries &Android Runtime layer、Linux Kernel layer,其结构图及详情参见文献[1-3]。
典型的Android开发环境架构如图1所示。
Android使用Eclipse IDE,Eclipse是开放源代码、基于Java的可扩展开发平台,通过插件组件构建开发环境。
Eclipse附带一个标准插件集,包括Java开发工具。
Android SDK是在Android平台上开发应用程序的工具集,包括:用于Eclipse中的开发工具插件ADT、模拟仿真器AVD、调试工具(如DDMS)、打包成APK文件的工具、Dalvik虚拟机、Webkit网页浏览引擎、2D/3D图形界面、SQLite数据库、照相机、指南针等。
基于Android平台的三维实时全景地图设计与实现的研究报告
基于Android平台的三维实时全景地图设计与实现的研究报告随着移动互联网和智能移动设备的普及,定位服务、导航和地图应用已经成为人们日常生活中必不可少的组成部分。
现代地图应用的目标是提供准确的地理位置信息,辅助人们查找周围的有用地点和探索城市的各个角落。
本文提出并实现了一个基于Android平台的三维实时全景地图设计。
该设计具有以下三个重要特点:首先,应用程序能够提供实时动态更新的街景和全景图像;其次,整个地图系统是基于三维建模的,具有高度的真实感和逼真度;最后,用户可以通过多种方式浏览该地图,以便更好地理解环境和导航。
本文介绍该地图系统的设计和实现细节。
首先,我们介绍了实现该系统使用的技术和软件工具。
然后,我们详细描述了建立全景地图所需的数据采集和处理过程。
我们还介绍了地图导航和用户界面的基本设计,以及与其他导航和地图应用相比的额外特性。
最后,我们展示了实现系统的实验结果,验证了我们的方法的有效性。
在本系统的开发过程中,我们使用了Visio Studio 2012作为开发环境,使用OpenGL ES图形库进行三维模型的渲染和呈现。
数据采集通过装备单反相机、HDR技术及全景拼接工具完成,通过贴图技术生成最终的全景地图。
地图导航和用户界面的设计受到了现有地图应用的启发,并添加了基于重力感应器的自动旋转和手势控制等方便的功能。
另外还支持标注和搜索等实用功能。
实验结果表明,我们的系统可以在现有Android设备上高效地运行,并能够满足用户浏览和导航的需要。
总之,本文提出并实现了基于Android平台的三维实时全景地图设计。
通过使用三维建模、全景采集和渲染技术,我们成功地实现了高度真实感的地图。
该系统还具有多种导航和辅助功能,可以帮助用户更好地了解环境和导航。
未来的工作可以进一步增加算法和功能,提高地图的准确度和逼真度。
数据分析是现代地图应用和导航系统开发中必不可少的环节。
通过分析各种地理和环境数据,开发人员可以很好地了解用户需求,并提供更好的地图服务。
AndroidCamera详解
AndroidCamera详解相关的类1. android.hardware.camera22. Camera3. SurfaceView---这个类⽤于向⽤户呈现实时相机预览。
4. MediaRecorder---这个类⽤于从摄像机录制视频。
5. Intent---MediaStore.ACTION_IMAGE_CAPTURE或MediaStore.ACTION_VIDEO_CAPTURE可⽤于捕获图像或视频,⽽⽆需直接使⽤Camera对象。
清单声明在使⽤Camera API开始开发应⽤程序之前,应确保您的清单具有适当的声明,以允许使⽤相机硬件和其他相关功能。
相机权限 - 您的应⽤程序必须请求使⽤设备相机的权限。
<uses-permission android:name="android.permission.CAMERA" />注意:如果您通过调⽤现有的摄像头应⽤程序来使⽤摄像头,则应⽤程序不需要请求此权限。
相机功能 - 您的应⽤程序还必须声明使⽤相机功能,例如:<uses-feature android:name="android.hardware.camera" />存储权限 - 如果应⽤程序将图像或视频保存到设备的外部存储设备(SD卡),则还必须在清单中指定此选项。
<uses-permission android:name="android.permission.WRITE_EXTERNAL_STORAGE" />⾳频录制权限 - 对于使⽤视频捕获录制⾳频,应⽤程序必须请求获取⾳频捕获权限。
<uses-permission android:name="android.permission.RECORD_AUDIO" />创建⾃定义摄像头为应⽤程序创建⾃定义摄像头界⾯的⼀般步骤如下:1. 检测和访问摄像机 - 创建代码以检查摄像机是否存在并请求访问。
Android开发中的摄像头预览和视频录制技术(五)

Android开发中的摄像头预览和视频录制技术在当今智能手机普及的时代,摄像头已成为手机功能的重要组成部分之一。
同时,随着Android操作系统的不断发展,摄像头的应用也越来越广泛。
本文将讨论Android开发中的摄像头预览和视频录制技术。
一、摄像头预览技术在Android开发中,摄像头预览技术是使用摄像头功能的基础。
通过对摄像头进行预览,用户可以在手机屏幕上看到实时的图像。
这项技术在相机应用、视频聊天或直播等场景中被广泛使用。
1. SurfaceView与TextureView在Android中,实现摄像头预览的常用控件有SurfaceView和TextureView。
SurfaceView比较常见,也是比较成熟的预览控件。
通过SurfaceHolder类可以将摄像头预览数据与SurfaceView进行绑定,实现预览功能。
TextureView则是在API 14级引入的,相较于SurfaceView,它的灵活性更高,可以在布局文件中直接引用,并可以方便地与其他控件进行组合使用。
2. 摄像头参数设置在进行摄像头预览时,我们还可以对摄像头的参数进行设置,以达到更好的效果。
例如,可以设置预览的分辨率、对焦模式、曝光度、白平衡等参数。
通过调整这些参数,可以使得摄像头预览更加清晰、高质量。
二、视频录制技术除了摄像头预览技术外,Android开发中还有视频录制技术,它可以将摄像头捕捉到的图像数据保存为视频文件,为用户提供更多的功能和体验。
1. MediaRecorder类在Android中,使用MediaRecorder类可以简单地实现视频录制功能。
通过设置一些参数,如视频的格式、分辨率、码率等,我们可以控制视频录制的质量和大小。
同时,还可以设置音频的相关参数,并与视频数据进行同步,实现完整的视频录制。
2. 相机数据处理在视频录制过程中,我们还可以对摄像头捕捉到的图像数据进行处理,以实现一些特殊的效果。
例如,可以对图像进行滤镜处理、美颜操作、动态贴纸等。
在Android上的实时OpenCV-研究报告外文翻译
在Android上的实时OpenCV-研究报告外文翻译本报告旨在对在Android平台上实时OpenCV进行研究的相关工作进行总结和翻译。
引言OpenCV是一种开源的计算机视觉库,提供了用于图像处理和分析的丰富功能和工具。
在Android平台上,使用OpenCV可以实现许多实时计算机视觉应用程序。
相关工作在过去的几年中,许多研究人员已经在Android上对实时OpenCV进行了深入的研究。
以下是一些值得注意的相关工作:1. 研究A:作者A通过使用OpenCV在Android上实现了一个实时人脸识别应用程序。
他们使用了OpenCV的人脸识别算法,并集成到Android应用程序中。
他们的研究结果表明,在安卓设备上可以实现快速和准确的实时人脸识别。
2. 研究B:作者B使用OpenCV和Android相机API开发了一个实时手势检测应用。
他们使用了OpenCV的图像处理算法来检测和识别手势,并将结果实时显示在Android设备的屏幕上。
他们的研究结果表明,这种方法可以实现准确和实时的手势检测。
3. 研究C:作者C研究了OpenCV在Android上的实时边缘检测应用程序。
他们使用了OpenCV的边缘检测算法,并将其应用于从Android相机获取的实时图像。
他们的研究结果表明,这种方法可以实现快速和精确的边缘检测。
结论通过对Android平台上实时OpenCV的相关工作进行研究和总结,我们可以看出OpenCV在实时计算机视觉应用程序开发方面具有很大的潜力。
在未来的研究中,可以进一步探索和改进这些应用程序,以满足不断增长的计算机视觉需求。
参考文献[1] 作者A. "Android上实时人脸识别应用程序的研究." 计算机视觉杂志, 2018.[2] 作者B. "基于OpenCV和Android的实时手势检测." 图像处理研究, 2019.[3] 作者C. "Android上实时边缘检测应用程序的开发与优化." 计算机图形学论文集, 2020.。
Android自定义相机超详细讲解
Android⾃定义相机超详细讲解Android⾃定义相机超详细讲解由于⽹上关于Android⾃定义相机的⽂章写得不是太详细,Google官⽅的⽂档⼜说得不太容易理解,所以今天我来详细讲解⼀下Android⾃定义相机。
这篇⽂章主要写给⼀些刚刚接触Android的那些看官⽅API困难以及不太了解Android机制的同学们,所以熟练开发者可以绕道了。
最近在使⽤Camera类的时候发现居然被弃⽤了,API 21中出现了camera2这个类来代替camera类,但是笔者的⼿机才andorid 4.4,国内要⽤上6.0⾄少明年去了,所以本次还是讲解Camera这个类。
⾸先是加⼊权限,这个直接按照google的api向导或者看api⽂档会有详细说明的,所以这⾥不讲了。
那么接下来,使⽤相机我们总需要⼀个能够看到图像的地⽅吧,这⾥Google叫我们使⽤SurfaceView这个类,那么SurfaceView这个类是什么呢,⾸先这个类是继承View的,可以在将图像绘制在屏幕上并显⽰给⽤户。
其实能够显⽰的原因是SurfaceView中包含⼀个Surface对象,Surface是SurfaceView的可见部分,好了我们提到了Surface,⼜是⼀个让很多⼈头疼的概念,好吧让我们重头来讲解。
⾸先我们在⼿机屏幕上看到的是这些画⾯都可以算是View(当然SurfaceView也算View),那么View是什么?View其实就是⼿机内存中的⼀⼩块区域,所谓显⽰,就是显卡等硬件将内存中的信息显⽰在屏幕上的过程,这下我想⼤家应该清楚⼀点了吧,我们继续,那我们说到的可见部分⼜是怎么回事呢,其实我们看到的屏幕可以说是2维的,也就是长和宽,但是在它的内部其实是3维的,还有⼀个维度就是层Layer,也就是层的概念,⽤过Visio或者AutoCAD的同学应该很好理解,在画图的时候,上层有时会将下层的遮挡,我们看到的图像就是这样⼀层⼀层堆叠起来的,这当中有些层不可见,有些层部分可见,有些层完全可见,我们看到的就是它们之中可见的部分,⽽Surface就是SurfaceView中的⼀个可见的部分,我们在摄像或者拍照⽤的就是它显⽰了。
如何使用Android的图像识别和二维码识别功能进行开发
如何使用Android的图像识别和二维码识别功能进行开发现如今,移动应用已成为人们生活的一部分,而图像识别和二维码识别功能则成为了开发人员关注的焦点之一。
本文将从基本概念、开发环境、代码实现等方面,探讨如何在Android平台上使用图像识别和二维码识别功能进行开发。
一、基本概念图像识别是一项利用计算机视觉技术,通过对图像进行处理和分析,从而识别出其中的特征或对象的技术。
而二维码识别是一种通过扫描二维码图片获取其中蕴含的信息的技术。
这两项技术广泛应用于商业、安全、娱乐等领域,为用户提供了更加便捷和智能的功能。
二、开发环境在进行图像识别和二维码识别开发之前,需要准备 Android Studio 开发环境和相关的开发工具库。
Android Studio 是一个全集成的开发环境,可以提供丰富的开发功能和插件支持。
而针对图像识别和二维码识别,可以选择 OpenCV、ZXing 等开发工具库进行辅助开发。
三、图像识别功能开发1. 引入 OpenCV 开发库:在项目中引入 OpenCV 开发库,并在文件中进行配置,确保项目能够正常使用 OpenCV 相关的功能。
2. 初始化图像识别引擎:在应用启动时,初始化图像识别引擎,并进行一些必要的设置和参数配置。
3. 图像处理与特征提取:通过 OpenCV 提供的函数,对图像进行处理和特征提取,获得图像的特征向量或关键点等信息。
4. 特征匹配和识别:根据已有的特征数据库,与当前图像的特征进行匹配和识别,判断图像中包含的对象或特征。
5. 结果展示与交互:将图像识别结果以图像或文字形式展示给用户,并提供相应的交互功能,以满足用户需求。
四、二维码识别功能开发1. 引入 ZXing 开发库:类似于图像识别功能开发,需要在项目中引入 ZXing 开发库,并进行相关配置。
2. 启动相机扫描:通过调用相机接口,启动二维码扫描功能,实时从相机预览画面中识别二维码。
3. 二维码解码:获取相机画面中的二维码图像,并进行解码操作,获取其中的信息。
基于Android和ARM的监视平台的设计与实现
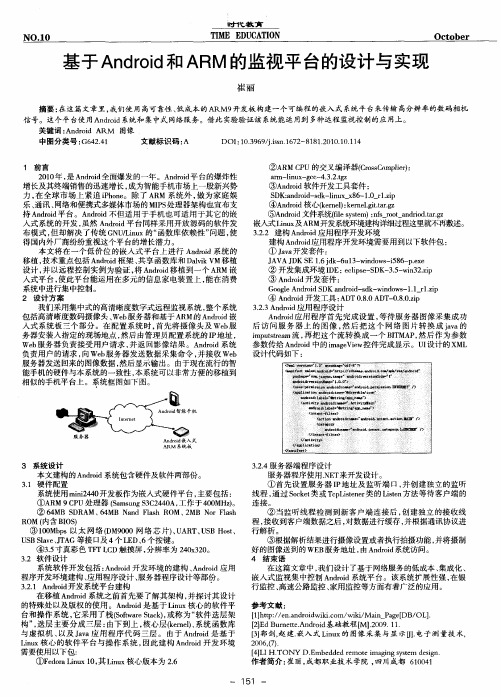
②A M P R C U的交叉 编译器(rsC mp e : Cos o l r i)
a m - i x e - 3. t z r lnu —g e 4. 2. g
增长及其终端销售 的迅速增长 , 为智能手机市场上一股新兴 势 成 力, 在全球 市场上 紧迫 ihn 。除 了 A M 系统外 , Poe R 做为 家庭娱 乐、 通讯 、 网络和便携式多媒体市场 的MIS P 处理器架构也 宣布支 持 A do 平 台。A dod不但 适用 于手 机也可适用 于其它 的嵌 n ri d n ri 入式系统 的开发 , 虽然 A do 平 台同样采用开放源码 的软件发 n ri d 布模式 , 但却解决 了传统 G ULn x的“ N /iu 函数库依赖性 ” 问题 , 使 得 国内外厂商纷纷重视这个平台的增长潜力 。 本文将 在一个低 价位的嵌入 式平 台上 进行 A do n ri d系统 的 移植 , 术重点包括 A do 技 n ri d框架 、 共享 函数库和 D li V av M移植 k 设计 , 以远程控制 实例为验证 , A do 移植 到一个 A M嵌 并 将 n ri d R 入式平 台, 使此平 台能运用在多元 的信息家电装置上 , 能在消费 系统中进行集 中控制 。
⑤A dod nri 文件系统(l ss m :f ro adid a. fe yt )ns ot n r .r z i e — — ot g 嵌. Ln x A M开发系统环境建构详细过程这里就不再敷述。 A  ̄ i 及 R u 32 建构 A dod .2 . n ri 应用程序开发环境 建构 A do 应用程序开发环境需要用到以下软件包 : n ri d ① Jv 开发套件 : aa
④ A do nri 发工 具 : D ..AD 一 ..z d开 A T0 0 T 08 .p 8 0i 3 . A dod .3 nri 应用程序设计 2 A do 应 用程序首先完 成设置 , n ri d 等待服 务器 图像采集 成功 后 访 问服 务器 上 的 图像 , 后 把这 个 网 络 图片转 换 成 i a 然 a 的 v i p tra m usem流 , t 再把这 个流转 换成一 个 BT A , IM P 然后 作为参数
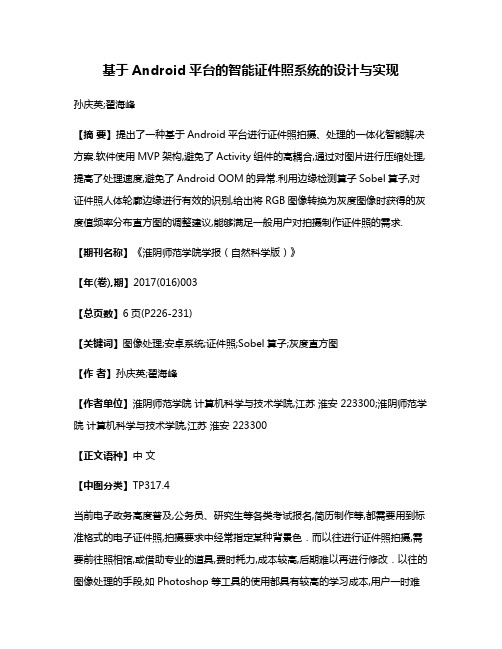
Android 的照相机系统

硬件 操作
字符设备驱动程序核心
硬件层 摄像头 视频输出设备
2.2 硬件抽象层的内容
Camera 的硬件抽象层的在 UI 库的头文件 CameraHardwareInterface.h 文件定义。 在这个接口中,包含了控制通道和数据通道 ,控制通道用于处理预览和视频获取的开始 / 停 止、拍摄照片、自动对焦等功能,数据通道通过 回调函数来获得预览、视频录制、自动对焦等数 据。 Camera 的硬件抽象层中还可以使用 Overlay 来实现预览功能。
Android 的照相机系统
韩 超 @ Android 技术
Android 的 Camera 系统
第一部分 Camera 系统的结构 第二部分 移植和调试的要点 第三部分 Camera 实现方式
第一部分 Camera 系统的结构
照相机系统下层的硬件通常是摄像头 设备,主要用于向系统输入视频数据。摄像 头设备通常包括处理器中的数据信号处理相 关的控制器和摄像头传感器。摄像头传感器 又可以分为普通型和智能型的。摄像机硬件 对软件部分主要提供视频数据。
第一部分 Camera 系统的结构
在理论上,照相机的取景器、视频、 照片等数据都可以传送到 Java 层,但是通常 情况下,这些数据不需要传递到 Java 层。仅 有少数情况需要在 Java 层获取数据流,例如 通过摄像头进行扫面识别的时候,需要取景 器的数据帧。
第一部分 Camera 系统的结构
第一部分 Camera 系统的结构
自下而上, Camera 系统分成了以下几个部分。 ( 1 )摄像头驱动程序:通常基于 Linux 的 Video for Linux 视频驱动框架。 ( 2 ) Camera 硬件抽象层 frameworks/base/include/ui/ frameworks/base/include/camera/ 主要的文件为 CameraHardwareInterface.h ,需要各 个系统根据自己的情况实现。 ( 3 ) Camera 服务部分 frameworks/base/camera/libcameraservice/ Camera 服务是 Android 系统中一个单独部分,通过 调用 Camera 硬件抽象层来实现。
基于Android平台的智能证件照系统的设计与实现
基于Android平台的智能证件照系统的设计与实现孙庆英;翟海峰【摘要】提出了一种基于Android平台进行证件照拍摄、处理的一体化智能解决方案.软件使用MVP架构,避免了Activity组件的高耦合,通过对图片进行压缩处理,提高了处理速度,避免了Android OOM的异常.利用边缘检测算子Sobel算子,对证件照人体轮廓边缘进行有效的识别,给出将RGB图像转换为灰度图像时获得的灰度值频率分布直方图的调整建议,能够满足一般用户对拍摄制作证件照的需求.【期刊名称】《淮阴师范学院学报(自然科学版)》【年(卷),期】2017(016)003【总页数】6页(P226-231)【关键词】图像处理;安卓系统;证件照;Sobel算子;灰度直方图【作者】孙庆英;翟海峰【作者单位】淮阴师范学院计算机科学与技术学院,江苏淮安 223300;淮阴师范学院计算机科学与技术学院,江苏淮安 223300【正文语种】中文【中图分类】TP317.4当前电子政务高度普及,公务员、研究生等各类考试报名,简历制作等,都需要用到标准格式的电子证件照,拍摄要求中经常指定某种背景色.而以往进行证件照拍摄,需要前往照相馆,或借助专业的道具,费时耗力,成本较高,后期难以再进行修改.以往的图像处理的手段,如Photoshop等工具的使用都具有较高的学习成本,用户一时难以掌握.针对当前这种制作、处理电子证件照困难的情况,本文提出了一种基于Android平台的证件照处理系统,该系统使用MVP架构[1],利用Android自带设备进行拍摄,通过自定义相机的取景界面对用户进行姿势和距离的引导,使用户可以拍出比例适宜的证件照.拍摄完成后,通过有效的压缩算法,对图片按比例进行压缩,再加载进内存中进行图片处理.软件将使用Sobel算子进行人体轮廓边缘检测,实现证件照前后景的分离,并以此进行背景色的替换.同时,还将通过将所拍摄图像转换为灰度图像并得到的灰度图像的灰度值频率直方图来判断是否存在明显的图像质量问题,并提供优化建议.软件提供了一种基于Android平台进行证件照拍摄、处理的一体化解决方案,能满足一般用户快捷、高效制作精美证件照的需求.基于移动平台的图片编辑系统,采用MVP(Model View Presenter)的系统架构.MVP为传统软件所采用的MVC系统架构的演化版本,让Model与View层完全解耦.具体架构见图1所示.在Android程序设计中,Activity组件的高耦合,往往给软件的编写和维护带来了较大的麻烦.因为其既要处理View层的显示,又要作为Controller,负责监听用户的操作.传统的MVC架构下的Android开发: 1) View: 对应布局文件; 2) Model: 业务逻辑和实体模型; 3) Controller: 对应于Activity.而将架构改为MVP之后,Presenter的出现,将Activity视为View层,Presenter负责完成View层与Model层的交互.MVP架构: 1) View: 对应于Activity,负责View的绘制以及与用户交互; 2) Model: 依然是业务逻辑和实体模型; 3) Presenter: 负责完成View与Model间的交互.MVC架构与MVP架构两者区别如图2所示.现在主流Android手机设备的相机像素都在数百万,因此,其拍摄出来的照片大小有4~5 MB,若不对其进行压缩处理,直接加载进内存进行图像处理,将导致Android OOM异常.此外,Android图像的显示同样受到imageview控件的限制.因此,对拍摄出来的原始图像进行压缩处理是十分必要的.为了保持图片原有的像素比例,使内容不被拉伸变形,处理的思路有: 1) 获取图片的像素宽高; 2) 计算需要的压缩比例; 3) 通过计算出来的压缩比例对图像进行压缩,再加载进内存进行处理.2.1 BitmapFactory类Android平台封装了1个android.graphics.BitmapFactory类,用来解析图片,创建Bitmap对象.这个类里提供了1个关键的方法为decodeResource(Resources res,int resId,BitmapFactory.option options),该函数有3个参数,前两个参数是用来确定所要处理的图像的.最关键的是第3个参数BitmapFactory.Option对象,可以通过对该Option对象的成员变量进行设置,来灵活的解析获取图片,并且可以用来进行图片压缩.Option类描述的是图片配置信息,这里介绍一下系统中使用的几个参数:1) inJustDecodeBounds: 将该参数设置为true时,decode获取的图片只会加载像素宽高信息.设置为false时,decode将会完全加载图片.2) inSampleSize: 该参数确定图片压缩比例,一般设置为2的幂数.3) outHeight: 图片原高度.4) outWeight: 图片原宽度.2.2图像压缩实现算法可以通过下面的算法来进行图片的压缩加载:options.inJustDecodeBounds=true;//仅将像素宽高信息存储在options中,不会返回bitmap对象BitmapFactory.decodeResource(res,resId,options);options.inSampleSize=inSampleSize;//这里返回1个Bitmap对象BitmapFactory.decodeResource(res,resId,options);这里存在一个难点就是确定inSampleSize的值.本文算法是,先通过上文描述的方法获取到原图比例后,根据实际的证件照分辨率需求(一般不会大于手机分辨率),设置对应的宽高targetWidth和targetHeight.当图片的实际宽度width大于targetWidth或者实际高度Height大于targetHeight的时候,算法将进入一个循环,循环的条件是图片的实际宽度width的一半即(width/2)除以inSampleSize大于或等于目标宽度targetWidth,并且图片的实际高度的一半即(height/2)除以inSampleSize大于或等于目标高度targetHeight.每进行一次循环,inSampleSize的值加倍,直至循环停止.该算法流程总结如图3所示.为了对用户拍摄出来的照片或者已有的证件照,进行替换背景色处理,需要对照片进行边缘检测,将人体轮廓的边缘与背景区分开来,再将背景区域的像素RGB值替换为用户所需要的颜色的RGB值.算法的实现过程:1) 图片去噪.因为软件虽然会建议用户在白墙之前,或者在纯色背景之前进行拍照,但墙面有可能会有坑洼或者突起,此时图片将会存在一些噪声点.因此在进行边缘检测之前,需要对图片进行去噪处理.2) 利用边缘检测算法,进行边缘检测,得到边缘图.由于证件照的特性,前景和背景是被明显分开的,因此,对边缘图像进行轮廓跟踪相较于其他背景复杂的图像来说,简单许多.因此一些简单的边缘检测算法,就可以实现较好的效果.3) 遍历图像,将不属于人体边缘轮廓区域内的像素点的RGB值,替换为用户所需要的RGB值.3.1 图片去噪本文利用高斯滤波器来进行图片的去噪.高斯滤波器的滤波矩阵相当于1个离散的二维高斯函数,如式(1)所示:其中σ是指“钟形”函数的宽度(标准差),r是指与中心点的距离(半径).中心处的像素具有最大的权值1.0,其余位置的权值则随着与中心距离的增大而平稳减小.在高斯滤波器的滤波矩阵足够大的时候,能够足够的逼近高斯函数.为了避免截断误差,离散的高斯函数应该具有足够大的尺寸,一般取±2.5σ到±3.5σ.该软件采用的是1个“半径”为σ=10的离散高斯函数,因此其要求最小的滤波尺寸为51×51像素.一般而言,如果1个二维滤波器的滤波函数H(i,j)可以表示为2个一维函数的外积,那么它就是可x/y分离的,因此式x可以表示为如下的乘积形式,如式(2).因此,1个二维高斯滤波器可以分解为一对一维高斯滤波器.这样在进行卷积运算的时候,可以减少部分计算量.例如本文所用到的为51×51像素的滤波器,进行x/y 分离之后,将比完整版的二维滤波器速度快50倍左右.算法java语言实现如下:float [] makeGaussKernelld (double sigma){//创建滤波核Int center=(int)(3.0 * sigma);float [] kernel=new float [2 * center+1];//奇数大小//填充滤波核double sigma2=sigma * sigma;for (int i=0;i < kernel.length;i++) {double r=center-I;kernel [i]=(float) Math.exp(-0.5 * (rr)/sigma2);3.2 边缘检测算法由于证件照具有前景和背景被明显分开的特性,因此,一些简单的边缘检测算法也会起到一个较好的效果.目前较为常见的几种边缘检测算子有:Sobel算子[2],Roberts算子[3],Prewitt算子[4],Laplacian算子[5]以及Canny算子[6],本文仅对这些算子的实现原理进行简单的描述和对比,以选择一个适合在Android平台上使用的算子.Roberts算子通过两个2×2滤波器沿图像的对角线方向来估算方向梯度,虽然其对图像中的对角线边缘有良好响应,但是其方向选择性较差.Laplacian算子是一种二阶微分算子,它需要先在水平和垂直方向分别计算二阶导数,在边缘点两旁的像素的二阶导数异号.这种算子适合只考虑边缘点的位置而不考虑周围的灰度差的情景.不符合证件照处理的实际场景.Canny算子是当前较为主流的一种边缘检测算子,它是将图片去噪,边缘识别及轮廓增强结合在一起的一种算子,但是其计算量较大,处理过程繁杂,在不引入包含该算子算法的动态so库的情况下,不适宜应用在Android平台上,其实现参照文献[7].Sobel算子和Prewitt算子是一种小型边缘检测算子,它们的差异仅在滤波器不同,相对于Prewitt算子,Sobel算子为其滤波器的中间的行和列分配了更大的权值,因此仅对使用更加广泛的Sobel算子进行讨论.Sobel算子使用离散型的差分算子来运算图像亮度函数的梯度的近似值.其缺点在于当图像背景复杂,轮廓较多的时候,它并不能将图像的主题与背景进行严格的区分.然而,在证件照的处理情景中,前景和背景差距很大,且背景噪声较小,经过高斯模糊处理后,可以忽略,因此Sobel算子可以实现较好的效果.其优势在于,算法实现简单,运算量没有Canny和Laplacian算子那么大,所以速度较快,可较好地应用在Android平台上.本文使用文献[8]提出的一种改良的Sobel滤波器,可以减小方向上的误差.一张标准证件照经过Sobel算子边缘检测后的实现如图4所示.通过该软件拍摄的照片经过Sobel算子边缘检测后的实现如图5所示.从实验的结果来看,Sobel算子对彩色证件照图像和8Bit黑白证件照图像的识别效果均良好,能较好地区分开前景和背景,检测出了人体的主体轮廓.并且,边缘轮廓线完整,可较好地进行轮廓的跟踪,绘制轮廓图.由于拍摄设备或者拍摄环境限制,用户所拍出来的照片往往存在一些缺陷,例如曝光不足、过度曝光、饱和度不够等.而用户并不能准确判断自己所拍摄的图像是否有上述问题. 因此,该软件将需要处理的RGB彩色图像转换为灰度图像,通过绘制灰度图像的灰度值的直方图来给出调整指导.Java中RGB彩色图像的表示如图6,每个分量的范围是0~255,剩下的8位用来表示透明度α.首先可以通过Bitmap类的getPixel(x,y)获得需要处理图片的整体像素值,赋值给int类对象color,然后通过android.graphics.Color类提供的静态方法Color.red(color)来获得该图片红色通道值,Color.green(color)获取该图片绿色通道值,Color.blue(color)获取蓝色通道值,Color.alpha(color)获取透明度α值.也可以通过如下移位和掩码操作来获得:但是这里转换为灰度图像,不能简单地对每一个RGB像素的各个颜色通道的值取平均值.因为红色和绿色比蓝色要亮,直接取平均值会导致图像的红色和绿色区域显得比较暗,而蓝色区域变得比正常情况下要亮.所以,这里需要应用颜色分量的加权和来计算等效的亮度值.本文使用ITU-BT.709推荐使用的数字彩色编码权值,红绿蓝的权值分别为:wr=0.2125,wg=0.7154,wb=0.072.因此转换后灰度值Y计算方法如式(3).Y=Lum(R,G,B)=wrR+wgG+wbB遍历整个RGB图像,将RGB像素点都转换为对应灰度值,与此同时,建立1个散列表,key值为灰度值,value值初始值为0,该灰度值每出现一次,便加上1,遍历完成后就可以获得1个反映了灰度值频率分布的直方图.算法的时间复杂度为O(n),空间复杂度为O(n),在图片较大时依然可以有较快的处理速度.利用该直方图,便可以对用户进行图片调整上的建议,例如一端较大强度取值范围未使用,而另一端充满峰值的直方图就代表图像的曝光不合适.大量的强度值没有取值,则意味着对比度较低.本文介绍了基于Android平台的MVP软件架构,总结阐述了一种在android平台上进行图片压缩的算法.简述了软件进行证件照背景替换的原理和算法,对比了各种边缘检测算子的优劣,并且通过实验证明Sobel算子可以用于证件照图像的边缘检测.提出了一种在Android平台上将RGB彩色图像转换为灰度图像并获取灰度值频率分布直方图的算法,以此来给用户以图像优化上的建议.该软件系统提供了拍摄、处理的一体化智能解决方案.有效地满足了用户对于快捷、高效制作精美证件照的需求.【相关文献】[1] Zhang Y, Luo Y. An architecture and implement model for Model-View-Presenter pattern[C]//Computer Science and Information Technology (ICCSIT), 2010 3rd IEEE International Conference on. IEEE, 2010, 8: 532-536.[2] 薛帅, 戴青, 冯东华, 等. 基于 Gabor 滤波器的 Sobel 算子图像边缘检测算法[J]. 信息技术, 2014, 38(1):17-20.[3] 康牧, 许庆功, 王宝树. 一种 Roberts 自适应边缘检测方法[J]. 西安交通大学学报, 2008, 42(1): 1240-1244.[4] 任小强, 王佩, 胡波, 等. Prewitt 图像边缘检测算法的优化设计与实现[J]. 中国集成电路, 2016(7): 34-38.[5] 孙增国, 韩崇昭. 基于 Laplacian 算子的图像增强[J]. 计算机应用研究, 2007, 24(1): 222-223.[6] 张川川, 王俊元, 杜文华, 等. 快速 Canny 算子提取刀具图像边缘的研究[J]. 测试技术学报, 2015, 29(2): 132-136.[7] Efford N. Digital image processing: a practical introduction using java (with CD-ROM)[M]. Addison-Wesley Longman Publishing Co., Inc., 2000.[8] Burger W, Burge M J.Digital image processing: an algorithmic introduction usingJava[M]. Springer, 2016.。
移动应用开发技术硬件设备调用方法
移动应用开发技术硬件设备调用方法移动应用的发展近年来取得了巨大的突破和进步,让我们的生活更加便利多样化。
移动应用开发技术中一个重要的方面就是硬件设备的调用方法。
下面我们将介绍几种常见的硬件设备调用方法。
1. 相机调用方法相机是现代移动设备的一项基本功能。
在移动应用开发中,我们经常需要使用相机进行拍照、视频录制等操作。
Android平台提供了Camera类,可以通过该类对相机进行操作。
首先需要在AndroidManifest.xml文件中添加相机权限。
然后,通过调用Camera.open()方法获取相机实例,可以通过设置参数对相机进行配置,最后调用Camera.takePicture()方法进行拍照。
在iOS平台上,可以通过AVFoundation框架调用相机。
首先需要在Info.plist 文件中添加隐私权限,并且添加相机访问权限的描述。
然后,通过AVCaptureDevice类获取相机设备,并创建AVCaptureSession对象进行配置,最后通过AVCaptureStillImageOutput捕捉图像。
2. 传感器调用方法传感器在移动应用中能够提供各种各样的信息,如加速度、光线强度等。
Android平台提供了一系列的传感器API可以进行调用。
通过SensorManager类可以获取设备上的所有传感器,并注册传感器监听器,以便实时获取传感器数据。
在iOS平台上,可以使用Core Motion框架来调用传感器。
通过CMMotionManager类可以获取设备上的各种传感器数据,如加速度、陀螺仪等。
可以通过startAccelerometerUpdates()方法等来开始获取特定传感器的数据,并通过回调函数进行处理。
3. 位置服务调用方法位置服务是现代移动应用经常使用的功能,可以实现地理位置的获取和定位。
Android平台上可以使用LocationManager类调用位置服务。
首先需要在AndroidManifest.xml文件中添加位置信息的权限,然后通过调用getLocationManager()方法获取LocationManager实例,并进行相关的配置,最后通过requestLocationUpdates()方法请求位置更新。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Android平台相机开发技术的研究
作者:李韦鹏王小雪
来源:《电脑知识与技术》2017年第09期
摘要:随着移动终端设备的飞速发展,Android作为移动终端的主流开发平台,其多媒体应用得到广泛普及。
相机作为多媒体应用中的一种备受青睐,且拍照功能是Android智能机产品的主要卖点。
该文结合作者自身研发经验,分析相机拍照功能的开发模式,常见的拍照技术,及针对相机开发技术存在的问题,对相机性能提升进行探究。
关键词:Android;拍照技术;性能提升
近年来伴随Android智能机的广泛普及,各类拍照功能深受消费者喜爱,成为智能机主要卖点。
受制于硬件条件,开发者少有机会接触应用层以下相机功能研发,手机厂商也不愿分享相关技术,导致部分开发者的技术研究仅停留在应用层,缺乏系统的Android智能机相机开发经验。
本文结合作者自身研发经验,较为全面地分析相机开发技术中存在的问题,并针对这些问题展开研究,给出了解决策略。
1.拍照功能开发模式
业界常见拍照功能开发模式有两种:第一种模式是以手机厂商为代表的全栈开发,围绕手机芯片平台相机模组展开的拍照功能研发;第二种模式是以相机应用开发商为代表的纯应用开发,通过Android平台Framework层calD,er~API接口获取图像数据,借助JNI调用App自研算法库完成图像处理工作。
第一种拍照模式如图1,手机厂商将核心工作放在平台层(Framework)、硬件抽象层(Hardware-Abstraction-Layer,HAL)层和驱动层去完成,结合算法和其他图像处理方法最大程度挖掘芯片平台的相机拍照能力。
厂商自研相机App申请底层上报驱动能力,UI显示底层支持的拍照模式以供使用。
第二种拍照模式如图2,相比手机厂商,纯应用开发不依赖硬件设备,算法和图像处理模块上浮使其不受制于芯片平台,但也因此牺牲了相机性能,或因无法调用底层接口而不能向用户提供某些需要硬件支持的拍照功能和拍照特效。
无论哪一种开发模式,其初衷都是希望通过技术手段向用户提供更加优质拍照技术。
2.常见拍照技术
2.1美颜拍照
市场上备受女性用户追捧的美肤、美颜、美妆等美化功能都是基于人脸检测技术(facial-detection)实现的。
国内相关应用开发商和手机厂商一般会采购专精于人脸检测技术的第三方提供的开发包来做二次开发,例如日本欧姆龙(Omron)忪司便是该技术的优秀供应商。
目前主流的人脸检测方法有两种:基于特征(feature-based)的人脸检测和基于图像(image-based)的人脸检测。
以基于特征的人脸检测方法最为普遍,且将人眼作为首选识别特征。
美颜等特效功能运行大致流程如下:
人脸检测算法首先作用于底层相机上报的预览帧或图像帧,识别出人眼后定位眉、眼鼻T 型区、嘴、下巴,并将识别数据放人人脸信息结构体中,结构体作为人参传人美颜函数;接着美颜函数仅对原始帧中人脸框区域作美化处理,如:平滑祛皱、增白、大眼、浓眉、隆鼻、丰唇、白牙等;最后输出数据并显示。
实际产品中为保证相机预览界面流畅性,避免处理图像卡顿,会根据需要挑选部分美化操作;开发过程中往往需要解决遇内存耗费优化、图像缩放、人脸坐标转换、美化模板套用、光线和色彩调节等一系列问题。
2.2伪光场相机
光场相机(Lytro)是近年来较受关注的拍照技术,该技术运用微透镜阵列等硬件设备采集拍摄图像的光场参数(光线的方向、强度等);在后续图像处理时通过还原光场信息来实现例如“先拍照后对焦”等特有功能(也称为重对焦/全焦)。
智能手机是一种高度集成化的消费电子产品,受硬件研发难度和生产成本难以控制所限,单依靠在手机相机模组中集成微透镜阵列来实现“先拍照后对焦功能”的设想并不现实,因此借助软件技术来实现便成为一种有效的解决方案。
2013年Nokia发布的Lumia920手机率先实现“先拍照后对焦”功能,称为Refocus,即重对焦;2013年华为在Android J版本实现此功能,称为All-focus,即全焦;2014年Google在Android K版本也实现该功能并公布原理:在相机取景时通过运动求取结构算法(Sructure-from-Motion,SfM)及光束法平差来计算相机的3D定位、定向及帧序列中图像特征的3D位置,再利用多视角立体算法(Muhi-View-Stereo,MVS)算参照图上每一个像素的景深,最后根据景深按比例模糊用户选取的焦点以外的场景,以达到视觉上的重对焦效果。
需注意的是Google伪光场拍照原理不同于华为等国内厂商,国内厂商的基本原理是:在不同焦距拍摄多张照片上报应用,待用户在图库中使用重对焦功能时,利用算法解析出用户点击处最清晰照片并显示出来。
全流程细节如下:
1)用户按下快门拍摄照片,底层驱动控制相机模组马达步进,间隔对焦拍摄多张照片;相机马达步进幅度在研发阶段逐步调试到位,与相机模组参数相关。
如图3,Fx表示不同的步进焦距,Picx是在对应焦距下采集的图像帧。
2)HAL层和Framework层图像处理函数将采集到的图像按特定规则合成一张图片文件:多张图像数据追加到图片文件尾部,在图片文件头标记当前照片为特殊的光场相片,并记录每张图片数据长度和数据起始标志位(如图4)。
3)用户打开伪光场照片,图库App将所有照片解析出来并缓存,使用算法挑选用户点击区域最清晰的照片,并呈现给用户,从而完成整个先拍照后对焦过程(如图5)。
可用的简单算法有Sobel或Canny算子的边缘检测算法,或者更优秀的边缘检测算法。
实际开发时还需做两点改进:一是增加拍摄图片数量提升重对焦准确性;二是在图片切换时使用插帧法和边缘裁剪法提升重对焦时图片切换流畅感,形成图片推进啦伸的景深效果。
此外还可通过算法预处理和图片映射手段来改善性能:将相机取景现场划分为多个编号区域,待所有图片拍摄完毕后立即对每个区域使用算法挑选最清晰照片,并将对应图片编号同取景区域编号关联,随后将映射关系放入图片文件头结构中,重对焦操作时应用程序不用再使用算法解析所有图片,通过映射关系直接解析目标图片,即仅在拍摄过程中对所有图片使用一次挑选算法,从而大幅提升整体性能。
如图6,假设经算法挑选后AI区域最清晰图片是第7张图片,那么当用户点击AI区域时,显示第7张图片就能令用户感受重对焦效果。
2.3暗光场景拍照
环境光不足场景下可以采用:器件补光、模组自适应以及多帧合成等三种途径解决拍照问题,前两者倚重硬件能力,最后一种是软件方法。
1)在器件补光方面,灵活运用闪光灯加柔光灯组合能有效调节物体形态、轮廓和色彩,暗光自拍时在拍照瞬间调节LED屏幕亮度和颜色也能为前置摄像头补光。
2)在模组自适应方面,调整大小光圈控制进光能提高取景细节效果和景深效果,通过调低感光度IOS、优化鲋算法调节白平衡(AWB)和延长曝光时间(AE)也可提高拍照质量。
3)在多帧合成方面,典型实例有HDR拍照和多帧降噪,HDR的核心原理可概述为:对同一个景物短时间内,拍摄多张不同的曝光值的照片,利用不同曝光值对应的最佳细节合成为同一张照片,从而达到提到拍摄质量的目的。
在流程上,HDR模式拍摄时会发先设置3-5个曝光值,然后按所设的曝光值依次拍照,最后挑选出曝光不足、曝光正常及曝光过度3张照片合成1张HDR照片。
在实际应用中,手机厂商往往综合运用以上三种方法不断优化拍照效果,任何单一方法改进效果有限。
3.性能提升的探究
相机性能是手机测评的重要标杆,手机相机研发时需要关注的性能指标包括:拍立得时间(shoot-and-see)、相机启动时间、预览跟随流畅性、快速对焦能力等。
通过梳理全流程代码,简化或后置非必要加载流程能有效减少相机启动时间。
三星独辟蹊径,在手机启动流程中加入应用层以下相机相关进程的启动,从而在用户启动三星自研相机应用时无需再启动此类进程,让用户感觉相机启动很快。
第一,相机APP设计时应遵循UI扁平化原则,降低界面渲染对内存消耗。
第二,考虑将操作控件和预览Slurface控件分层设计,确保预览显示同操作界面切换互不影响。
第三,还应参考Android,J版本后Framework层Camera代码,采用流模式(Stream)优化App整体架构。
拍立得时间也可类比相机启动优化方法缩短耗时,但对某些难以改进的拍照模式,可提前在界面上显示所得照片缩略图,待后台处理图像完毕再存人数据库,在不影响易用性前提下,试图在视觉上给用户拍照快的错觉。
流畅性则需要减少预览时底层对预览帧持有时间以提升用户体验,对耗时的预览算法应裁剪非必要特效,仅保留主要效果,但要对拍照帧需作全特效处理。
如此设计的结果是,由于实际拍照效果优于预览效果,反而会给用户带来惊喜,提升用户对智能机照性能的评价。
一般来讲,将激光对焦、相位对焦和反差对焦三者组合使用的合成对焦效果最佳,因为相位对焦和激光对焦分针对远景/近景切换和暗光取景两种场景表现优异,在高通骁龙芯片将激光对焦技术普及的背景下,合成对焦效是未来相机对焦技术的发展趋势。
4.总结
本文从介绍Android智能机相机开发模式出发,解析了当前流行的美颜拍照、伪光场拍照、暗光拍照等多种拍照技术,研究了提升Android相机性能的基本策略,总结了相关开发经验,对从事Android智能机相机开发人员的研发工作具有指导意义。