芯片stm32f103t8u6
STM F 引脚功能定义

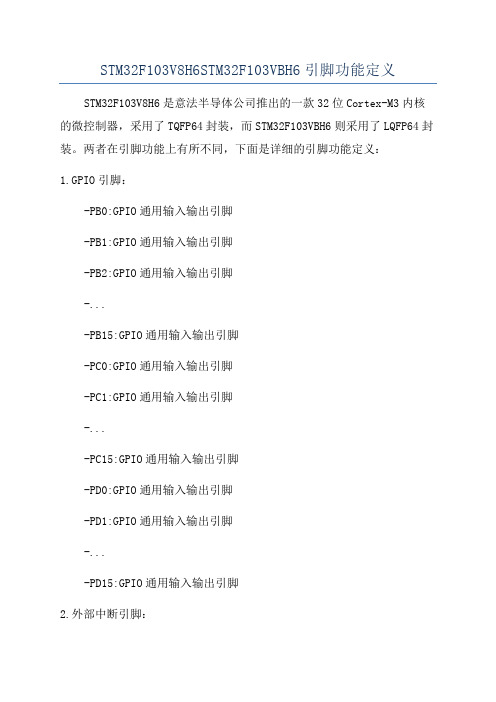
2.1 器件一览表二:器件功能和配置(STM32F103xx增强型)图一.STM32F103xx增强型模块框图工作温度=-40至+105°C (结温达125°C) AF: I/O口上的其他功能3管脚定义图二.STM32F103xx增强型VFQFPN36管脚图四.STM32F103xx增强型LQFP64管脚表三. 管脚定义表三.管脚定义(续)注:1. I :输入, O:输出, S:电源, HiZ:高阻2. FT:兼容5V3. 其中部分功能仅在部分型号芯片中支持,具体信息请参考表2。
4. PC13,PC14和PC15引脚通过电源开关进行供电,因此这三个引脚作为输出引脚时有以下限制:9作为输出脚时只能工作在2MHz模式下9最大驱动负载为30pF9同一时间,三个引脚中只有一个引脚能作为输出引脚。
5. 仅在内嵌大等于64K Flash的型号中支持此类功能。
6. VFQFPN36封装的2号,3号引脚和LQFP48,LQFP64封装的5号,6号引脚在芯片复位后默认配置为OSC_IN和OSC_OUT功能脚。
软件可以重新设置这两个引脚为PD0和PD1功能脚。
但对于LQFP100封装,由于PD0和PD1为固有的功能脚,因此没有必要再由软件进行设置。
更多详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
PD0和PD1作为输出引脚只能工作在50MHz模式下。
7. 此类复用功能能够由软件配置到其他引脚上,详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
4存储器映像图七存储器图5电气特性请参考英文版数据手册6封装参数请参考英文版数据手册7订货代码表四. 订货代码型号闪存存储器K字节SRAM存储器K字节封装STM32F103C6T6 32 10STM32F103C8T6 64 20STM32F103CBT6 128 20LQFP48STM32F103R6T6 32 10STM32F103R8T6 64 20STM32F103RBT6 128 20LQFP64STM32F103V8T6 64 20STM32F103VBT6 128 20LQFP100STM32F103V8H6 64 20STM32F103VBH6 128 20LFBGA100STM32F103T6U6 32 6STM32F103T8U6 64 10VFQFPN367.1 后续的产品系列后续的STM32F103xx增强型系列产品将会有更广泛的型号选择,芯片将会有更大的封装尺寸并内嵌多达512KB的Flash和48KB的SRAM。
3ALIENTEK精英STM32F103开发板原理图-IO引脚分配表
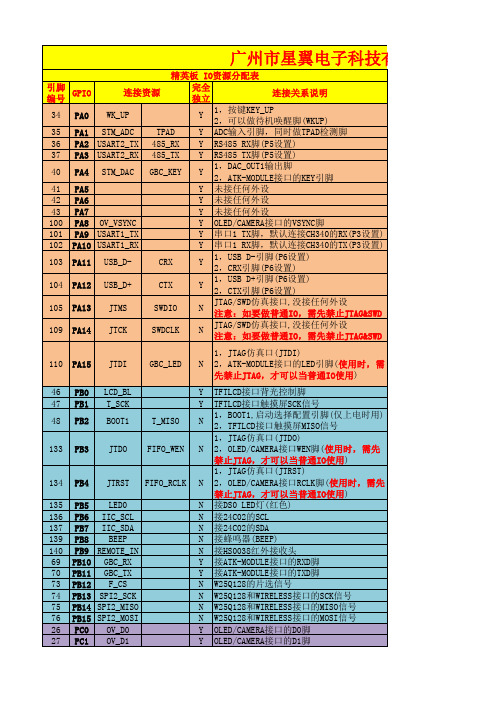
104 PA12 USB_D+
CTX
Y
1,USB D+引脚(P6设置) 2,CTX引脚(P6设置)
105 PA13 JTMS
SWDIO
NHale Waihona Puke JTAG/SWD仿真接口,没接任何外设 注意:如要做普通IO,需先禁止JTAG&SWD
109 PA14 JTCK
SWDCLK
N
JTAG/SWD仿真接口,没接任何外设 注意:如要做普通IO,需先禁止JTAG&SWD
该IO通过P6选择连接USB D-还是CAN的RX脚,如果去掉P6的跳线帽,则该IO完全独立
该IO通过P6选择连接USB D+还是CAN的TX脚,如果去掉P6的跳线帽,则该IO完全独立
JTAG/SWD仿真接口,没连外设。建议仿真器选择SWD调试,这样仅SWDIO和SWDCLK两个 信号即可仿真。该IO做普通IO用(有10K上/下拉电阻),需先禁止JTAG&SWD!此时无法 仿真! 库函数全禁止方法:GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable) JTAG仿真口,也接ATK-MODULE接口的LED脚,如不用JTAG和ATK-MODULE接口,则可做普 通IO用(有10K上拉电阻)。做普通IO用,需先禁止JTAG。此时可SWD仿真,但JTAG无法 仿真。 库函数禁止JTAG方法:GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable) 该IO接TFTLCD模块接口的背光控制脚(BL),当不插TFTLCD模块时,该IO完全独立 该IO接TFTLCD模块接口的触摸屏SCK信号,当不插TFTLCD模块时,该IO完全独立 该IO在上电时,作BOOT1用(由B1控制上拉/下拉,设置启动模式),同时作为TFTLCD模 块接口的触摸屏MISO信号,当不插TFTLCD模块时,则可做普通IO用(有10K上拉/下 JTAG仿真口,也作为OLED/CAMERA接口的WEN脚,如不用JTAG和OLED/CAMERA接口,则可 做普通IO用(有10K上拉电阻)。做普通IO用时,需先禁止JTAG。此时可用SWD仿真,但 JTAG无法仿真。设置方法参考PA15的用法。 JTAG仿真口,也作为OLED/CAMERA接口的RCLK脚,如不用JTAG和OLED/CAMERA接口,则 可做普通IO用(有10K上拉电阻)。做普通IO用时,需先禁止JTAG。此时可用SWD仿真, 但JTAG无法仿真。设置方法参考PA15的用法。 该IO连接DS0,即红色LED灯。如做普通IO用,则DS0也受控制,建议:仅做输出用 该IO连接24C02的SCL信号,有4.7K上拉电阻,不建议作为普通IO使用 该IO连接24C02的SDA信号,有4.7K上拉电阻,控制SCL=1,则该IO可做普通IO使用 该IO控制蜂鸣器(BEEP),不建议作为普通IO使用 该IO连接HS0038红外接收头,有4.7K上拉电阻,且受HS0038控制,不建议做普通IO使 该IO连接ATK-MODULE接口的RXD脚,如果不用ATK-MODULE接口,则该IO完全独立 该IO连接ATK-MODULE接口的TXD脚,如果不用ATK-MODULE接口,则该IO完全独立 该IO接W25Q128的片选信号,不建议做普通IO使用 SPI2_SCK信号,当不使用W25Q128(片选禁止)和WIRELESS接口时,该IO可做普通IO使用 SPI2_MISO信号,当不使用W25Q128(片选禁止)和WIRELESS接口时,该IO可做普通IO使 SPI2_MOSI信号,当不使用W25Q128(片选禁止)和WIRELESS接口时,该IO可做普通IO使 仅连接OLED/CAMERA接口的D0,当不使用OLED/CAMERA接口时,该IO完全独立 仅连接OLED/CAMERA接口的D1,当不使用OLED/CAMERA接口时,该IO完全独立
STM32F103R8T6数据手册_引脚图_参数

■ 2 x 12-bit, 1 µs A/D converters (up to 16 channels) – Conversion range: 0 to 3.6 V – Dual-sample and hold capability – Temperature sensor
2.3.5 Nested vectored interrupt controller (NVIC) . . . . . . . . . . . . . . . . . . . . . . 12
2.3.6 External interrupt/event controller (EXTI) . . . . . . . . . . . . . . . . . . . . . . . 13
■ 7 timers – Three 16-bit timers, each with up to 4 IC/OC/PWM or pulse counter and quadrature (incremental) encoder input – 16-bit, motor control PWM timer with deadtime generation and emergency stop – 2 watchdog timers (Independent and Window) – SysTick timer: a 24-bit downcounter
■ Up to 9 communication interfaces – Up to 2 x I2C interfaces (SMBus/PMBus) – Up to 3 USARTs (ISO 7816 interface, LIN, IrDA capability, modem control) – Up to 2 SPIs (18 Mbit/s) – CAN interface (2.0B Active) – USB 2.0 full-speed interface
STM32F103引脚功能定义

2.1 器件一览表二:器件功能和配置(STM32F103xx增强型)图一.STM32F103xx增强型模块框图工作温度=-40至+105°C (结温达125°C) AF: I/O口上的其他功能3管脚定义图二.STM32F103xx增强型VFQFPN36管脚图四.STM32F103xx增强型LQFP64管脚表三. 管脚定义表三.管脚定义(续)注:1. I :输入, O:输出, S:电源, HiZ:高阻2. FT:兼容5V3. 其中部分功能仅在部分型号芯片中支持,具体信息请参考表2。
4. PC13,PC14和PC15引脚通过电源开关进行供电,因此这三个引脚作为输出引脚时有以下限制:9作为输出脚时只能工作在2MHz模式下9最大驱动负载为30pF9同一时间,三个引脚中只有一个引脚能作为输出引脚。
5. 仅在内嵌大等于64K Flash的型号中支持此类功能。
6. VFQFPN36封装的2号,3号引脚和LQFP48,LQFP64封装的5号,6号引脚在芯片复位后默认配置为OSC_IN和OSC_OUT功能脚。
软件可以重新设置这两个引脚为PD0和PD1功能脚。
但对于LQFP100封装,由于PD0和PD1为固有的功能脚,因此没有必要再由软件进行设置。
更多详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
PD0和PD1作为输出引脚只能工作在50MHz模式下。
7. 此类复用功能能够由软件配置到其他引脚上,详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
4存储器映像图七存储器图5电气特性请参考英文版数据手册6封装参数请参考英文版数据手册7订货代码表四. 订货代码型号闪存存储器K字节SRAM存储器K字节封装STM32F103C6T6 32 10STM32F103C8T6 64 20STM32F103CBT6 128 20LQFP48STM32F103R6T6 32 10STM32F103R8T6 64 20STM32F103RBT6 128 20LQFP64STM32F103V8T6 64 20STM32F103VBT6 128 20LQFP100STM32F103V8H6 64 20STM32F103VBH6 128 20LFBGA100STM32F103T6U6 32 6STM32F103T8U6 64 10VFQFPN367.1 后续的产品系列后续的STM32F103xx增强型系列产品将会有更广泛的型号选择,芯片将会有更大的封装尺寸并内嵌多达512KB的Flash和48KB的SRAM。
STM32F103引脚功能定义
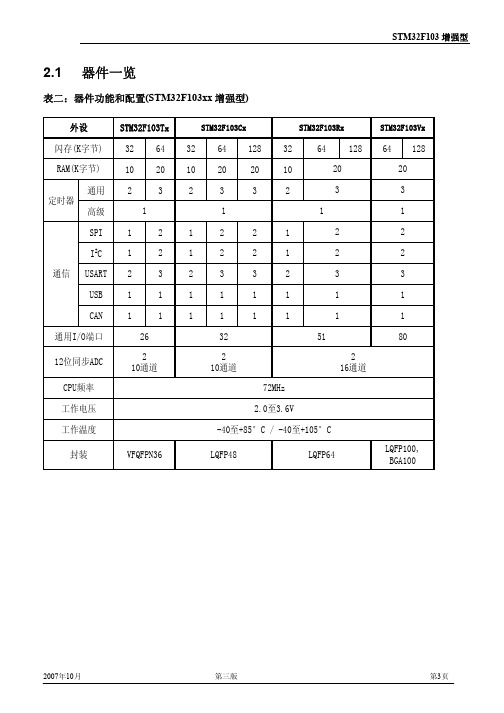
2.1 器件一览表二:器件功能和配置(STM32F103xx增强型)图一.STM32F103xx增强型模块框图工作温度=-40至+105°C (结温达125°C) AF: I/O口上的其他功能3管脚定义图二.STM32F103xx增强型VFQFPN36管脚图四.STM32F103xx增强型LQFP64管脚表三. 管脚定义表三.管脚定义(续)注:1. I :输入, O:输出, S:电源, HiZ:高阻2. FT:兼容5V3. 其中部分功能仅在部分型号芯片中支持,具体信息请参考表2。
4. PC13,PC14和PC15引脚通过电源开关进行供电,因此这三个引脚作为输出引脚时有以下限制:9作为输出脚时只能工作在2MHz模式下9最大驱动负载为30pF9同一时间,三个引脚中只有一个引脚能作为输出引脚。
5. 仅在内嵌大等于64K Flash的型号中支持此类功能。
6. VFQFPN36封装的2号,3号引脚和LQFP48,LQFP64封装的5号,6号引脚在芯片复位后默认配置为OSC_IN和OSC_OUT功能脚。
软件可以重新设置这两个引脚为PD0和PD1功能脚。
但对于LQFP100封装,由于PD0和PD1为固有的功能脚,因此没有必要再由软件进行设置。
更多详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
PD0和PD1作为输出引脚只能工作在50MHz模式下。
7. 此类复用功能能够由软件配置到其他引脚上,详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
4存储器映像图七存储器图5电气特性请参考英文版数据手册6封装参数请参考英文版数据手册7订货代码表四. 订货代码型号闪存存储器K字节SRAM存储器K字节封装STM32F103C6T6 32 10STM32F103C8T6 64 20STM32F103CBT6 128 20LQFP48STM32F103R6T6 32 10STM32F103R8T6 64 20STM32F103RBT6 128 20LQFP64STM32F103V8T6 64 20STM32F103VBT6 128 20LQFP100STM32F103V8H6 64 20STM32F103VBH6 128 20LFBGA100STM32F103T6U6 32 6STM32F103T8U6 64 10VFQFPN367.1 后续的产品系列后续的STM32F103xx增强型系列产品将会有更广泛的型号选择,芯片将会有更大的封装尺寸并内嵌多达512KB的Flash和48KB的SRAM。
J-Flash烧写STM32F103RET6芯片的设置方法与步骤
点击确定,完成程序烧写!
作者:查海宁
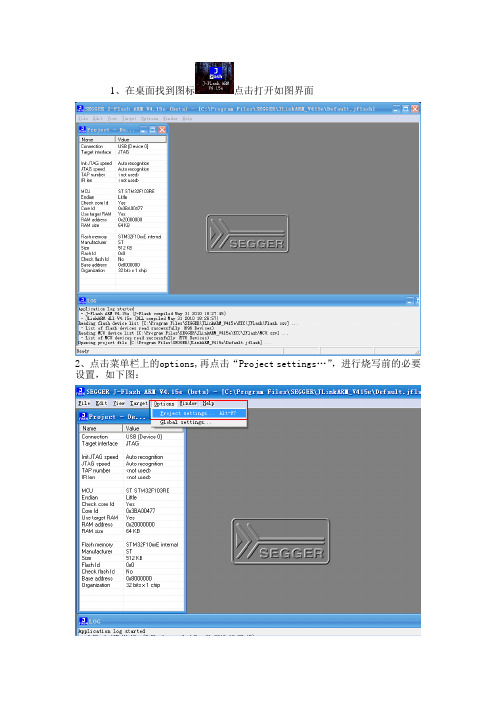
1在桌面找到图标点击打开如图界面2点击菜单栏上的options再点击projectsettings?进行烧写前的必要设置如下图
1、在桌面找到图标 点击打开如图界面
2、点击菜单栏上的options,再点击“Project settings…”,进行烧写前的必要设置,如下图:
在“General”页,选择“USB”,如下图:
在“Target Interface”页,选择“JTAG”,JTAG速度设置为“Auto selection”,如下图
在“CPU”页,选择开发板的CPU型号:ST STM32F103RE,如下图:
“FLASH”页不用设置,默认设置就可以了。
在“Production”页,我源自把“Start application”选上,则在下载成功之后,程序会自动运行。
在设置完成后,我们点击“应用”和“确定”退出。在JLINK软件界面左边,将显示烧写
信息,如下图:
点击“Target”后,再点击“Connect”,开始连接:
连接成功会有提示信息,如下边的状态拦:
接着,点击“File”,点击“opendata file...”打开烧录的HEX文件,如图:
加载完成后,点击“Target”点击“Auto”进行烧录:
RoboModule伺服电机驱动器用户手册

深圳市靠岸科技有限公司
产品硬件介绍
感谢您使用本产品。本产品所有硬件电路的设计都经过精确计算和反复验证,保证稳定可靠。相比于其他的直 流伺服电机驱动器,它具有如下优点:
1. 使用 QFN36 封装的 STM32F103T8U6,性能和可靠程度大大优于 LQFP 封装的 STM32。体积小、重量 轻、底部中央大面积外露焊盘用来良好散热,无外凸的引脚焊盘与内部导电路径短,自感系数小,封装体 内的布线电阻小。所以这种封装的 STM32 相比 LQFP 封装而言,具有显著优越的电性能。
本驱动器的 T~~~~其他串口设备的 R
本驱动器的 G~~~~其他串口设备的 G
本驱动器的 R~~~~其他串口设备的 T(备注:在所有的通信接口中,只有串口需要 T 和 R 交叉连接)
此串口调试接口,可以与 USB 转串口小板相连后与 PC 机通信,配合配套的“RoboModule 电机驱动调
试软件”来进行电机的编号设置、电机方向设置、编码器方向设置、各环路 PID 参数设置等。
直流伺服电机驱动器用户手册
RoboModule
直流伺服电机驱动器 用户手册
V1.2
2015.3.26
深圳市靠岸科技有限公司
Kaoan
Page 1
直流伺服电机驱动器用户手册
深圳市靠岸科技有限公司
免责声明和警告:
感谢您购买本产品。请严格遵守本手册的要求来使用您的产品。
请在首次使用本产品之前仔细阅读本声明。一旦使用,即视为对本声明的全部内容表示认可和接受。在使用产 品的过程中,使用者承诺对自己的行为及因此而产生的后果负责。使用者承诺是出于正当目的使用本产品,并 且同意遵守本条款及深圳市靠岸科技有限公司可能制定的任何相关政策或者准则。
微型仿生扑翼机控制器设计
微型仿生扑翼机控制器设计贺雪晨;周超英;汪超【摘要】针对微型仿生扑翼机载重量较小的特点,设计了一款微型扑翼机控制器.文章设计制作了扑翼机控制器的硬件电路,采用STM32F103T8U6作为主处理器,并设有陀螺仪、加速度计和磁力计.在此基础上将传感器的数据进行融合,采用基于四元数互补滤波的姿态解算方法求解出扑翼机的姿态角,以实际姿态角与目标姿态角的差值作为PD控制器的输入,输出量作为舵机控制量,提高扑翼机的飞行稳定性.文中所设计的控制器具有重量轻、尺寸小、与扑翼机契合度高的特点.【期刊名称】《电子设计工程》【年(卷),期】2018(026)016【总页数】5页(P72-75,80)【关键词】微型扑翼机;控制器;互补滤波;姿态解算【作者】贺雪晨;周超英;汪超【作者单位】哈尔滨工业大学深圳研究生院机电工程及自动化学院,广东深圳518055;哈尔滨工业大学深圳研究生院机电工程及自动化学院,广东深圳518055;哈尔滨工业大学深圳研究生院机电工程及自动化学院,广东深圳518055【正文语种】中文【中图分类】TN964.1仿生扑翼飞行器是一种模仿鸟类或昆虫飞行方式的新型仿生飞行器[1]。
与采用传统飞行方式的飞行器相比,仿生扑翼飞行器具有体积小、重量轻、隐蔽性好和灵活性高等优点[2],特别是在小尺度、低雷诺数条件下,相较于其他气动布局的飞行器有着难以比拟的优势,在民用和军事领域均有广泛的应用前景。
因此,近几十年来仿生扑翼飞行器的发展十分迅速,国内外的科研工作者对这一领域的研究也十分重视。
随着扑翼飞行器的小型化,势必要求其控制器做到尽量微型化。
文中设计一款微型控制器,并可解算出扑翼机的姿态角,采用PD控制器控制尾翼舵机,使扑翼机具有良好的飞行稳定性,满足微型扑翼机的控制要求。
1 硬件设计部分1.1 总体方案微型扑翼控制器可利用各传感器的数据解算出扑翼机的当前姿态,并解析接收机信号得到控制量,控制执行机构。
主要由以下几个部分组成:1)微处理器:扑翼控制器的核心单元,用来解算姿态角、解析遥控信号、控制执行机构;2)姿态传感器:包含加速度计、磁力计和陀螺仪,提供姿态解算的原始数据;3)通讯模块:遥控器通过接收机与控制器进行信息通信。
RoboModule伺服电机驱动器用户手册
Page 3Biblioteka 直流伺服电机驱动器用户手册
深圳市靠岸科技有限公司
典型应用场景
RoboModule 直流伺服电机驱动器可以适用于任何有刷直流电机的控制的场合。
直流伺服电机驱动器用户手册
深圳市靠岸科技有限公司
电机接口
功能按键
编码器 接口
SWD 调试接口
24V 电源 输入输出
接口 1
24V 电源 输入输出
接口 2
CAN 总线 输入输出
接口 1
Page 7
CAN 总线 输入输出
接口 2
TTL 串口调试
接口
直流伺服电机驱动器用户手册
深圳市靠岸科技有限公司
下面对上述所有接口进行详解:
本驱动器的 T~~~~其他串口设备的 R
本驱动器的 G~~~~其他串口设备的 G
本驱动器的 R~~~~其他串口设备的 T(备注:在所有的通信接口中,只有串口需要 T 和 R 交叉连接)
此串口调试接口,可以与 USB 转串口小板相连后与 PC 机通信,配合配套的“RoboModule 电机驱动调
试软件”来进行电机的编号设置、电机方向设置、编码器方向设置、各环路 PID 参数设置等。
它集成了开关电源降压电路、线性电源降压电路、功率驱动电路、电流采样电路、CAN 通信电路、蜂鸣器报 警电路、LED 指示灯电路、STM32 最小系统电路等在一块 50mm*50mm 的 PCB 电路板上。体积小、质量 轻、性能好。
它具有如下接口:电源接口、CAN 通信接口、增量式编码器数据采集接口、电机接口、TTL 串行通信接口、 SWD 调试接口。
基于STM32的微型步进电机驱动控制器设计

3.2 控制器控制策略
STM32软件负责该模块的主控制器,首先让启动模式处于非启动状态(DISABLE),外部中断也处于关闭状态。一旦启动模式被打开,即点亮LED;其次,进行速度设置、细分系数设置以及旋转角度设置。睡眠模式下LED缓慢闪烁。具体该驱动控制器软件设计流程图。
4 结论
通过系统对软硬件进行调试,该控制器实现了对步进电机速度、细分系数、任意角度的设置,并达到了预期设定的目标。此控制器可以应用在相对比较精细的项目控制中,加快项目研发周期。该模块的主要缺陷就是输出驱动电流不够大,无法应用在扭力比较大的场合中,因此,通过上述对A4988模块的分析,可以再对A4988芯片进行改进,更换导通电阻小、驱动电流大的MOS管,实现电机驱动器的设计。
1.2 A4988的工作原理
为了更加清晰地分析A4988的工作原理,首先深入分析A4988的内部结构。为A4988的内部结构图和典型的外部电路连接图。
由图1所示,A4988有一个编译器(Translator),主要负责微控制器和驱动电路的信息交互。通过该编译器可产生DA信号,配合比较器辅助PWM锁存器修复衰减信号,并且该编译器能够产生逻辑电平控制逻辑控制器,逻辑控制器再配合电流调节器和N型MOS管驱动电压共同驱动两路全桥电路。电路中所标电容必须严格与技术文档中所给的相同,Rosc主要更改并修复衰减模式,接VDD自动修复衰减,接GND电流衰减设置为增减电流同时修复。SENSE1和SENSE2检测驱动输出电压,实则是实时检测输出电流,供电流调节器调节输出电流信号,形成闭环控制。因此SENSE1和SENSE2管脚连接的电阻非常关键,一般这个电阻的阻值在零点几欧姆左右。
(1)串口通信模块[6]:主要负责上位机和下位机通信。上位机通过串口通信模块发送相应的功能指令给下位机,下位机执行上位机的指令并控制A4988驱动器模块驱动步进电机。。
STM32F103V8H6STM32F103VBH6引脚功能定义
STM32F103V8H6STM32F103VBH6引脚功能定义STM32F103V8H6是意法半导体公司推出的一款32位Cortex-M3内核的微控制器,采用了TQFP64封装,而STM32F103VBH6则采用了LQFP64封装。
两者在引脚功能上有所不同,下面是详细的引脚功能定义:1.GPIO引脚:-PB0:GPIO通用输入输出引脚-PB1:GPIO通用输入输出引脚-PB2:GPIO通用输入输出引脚-...-PB15:GPIO通用输入输出引脚-PC0:GPIO通用输入输出引脚-PC1:GPIO通用输入输出引脚-...-PC15:GPIO通用输入输出引脚-PD0:GPIO通用输入输出引脚-PD1:GPIO通用输入输出引脚-...-PD15:GPIO通用输入输出引脚2.外部中断引脚:-PA0:外部中断引脚-PA1:外部中断引脚-...-PA15:外部中断引脚-PB0:外部中断引脚-PB1:外部中断引脚-...-PB15:外部中断引脚-PC13:外部中断引脚-PC14:外部中断引脚-PC15:外部中断引脚3.ADC引脚:-PA0:ADC通道0输入引脚-PA1:ADC通道1输入引脚-...-PA7:ADC通道7输入引脚-PB0:ADC通道8输入引脚-PB1:ADC通道9输入引脚4.定时器引脚:-PA0:定时器1通道1引脚-PA1:定时器1通道2引脚-...-PA7:定时器1通道4引脚-PB0:定时器3通道1引脚-PB1:定时器3通道2引脚-...-PB15:定时器3通道4引脚5.UART引脚:-PA9:USART1TX引脚-PA10:USART1RX引脚-PA2:USART2TX引脚-PA3:USART2RX引脚-...-PB10:USART3TX引脚-PB11:USART3RX引脚6.SPI引脚:-PA4:SPI1片选引脚-PA5:SPI1时钟引脚-PA6:SPI1主输入引脚-PA7:SPI1主输出引脚-PB12:SPI2片选引脚-PB13:SPI2时钟引脚-PB14:SPI2主输入引脚-PB15:SPI2主输出引脚7.I2C引脚:-PB6:I2C1SCL引脚-PB7:I2C1SDA引脚-PB10:I2C2SCL引脚-PB11:I2C2SDA引脚8.PWM引脚:-PA0:TIM2通道1引脚-PA1:TIM2通道2引脚-...-PA7:TIM3通道2引脚-PB0:TIM3通道3引脚-PB1:TIM3通道4引脚-...-PB13:TIM1通道1引脚-PB14:TIM1通道2引脚-PB15:TIM1通道3引脚B引脚:-PA11:USBD-引脚-PA12:USBD+引脚这些只是引脚功能的一部分,具体的引脚功能还需要根据具体的应用场景来决定。
STM32F103T8U6, STM32F103TBU6 引脚功能定义
Pin 7
Pin 8
Pin 9 Pin 10 Pin 11 Pin 12
Pin 13
Pin 14
Pin 15 Pin 16 Pin 17 Pin 18 Pin 19 Pin 20 Pin 21 Pin 22
-50 0 Degrees
-40 0 Degrees
-30 0 Degrees -20 0 Degrees -10 0 Degrees 10 0 Degrees 20 0 Degrees
30 0 Degrees
40 0 Degrees 50 0 Degrees 60 0 Degrees 70 0 Degrees 80 0 Degrees 90 0 Degrees
PA0-WKUP
PA0/WKUP/USART2_CTS/ADC12_IN0/TI M2_CH1_ETR
I/O
- -220
PA1
PA1/USART2_RTS/ADC12_IN1/TIM2_CH 2
I/O
- -220
PA2
PA2/USART2_TX/ADC12_IN2/TIM2_CH3 I/O - -220
PB2
PB2/BOOT1
I/O FT -220
VSS_1
VSS_1
Power - -220
VDD_1
VDD_1
Power - 220
PA8
PA8/USART1_CK/TIM1_CH1/MCO
I/O FT 220
PA9
PA9/USART1_TX/TIM1_CH2
I/O FT 220
PA10
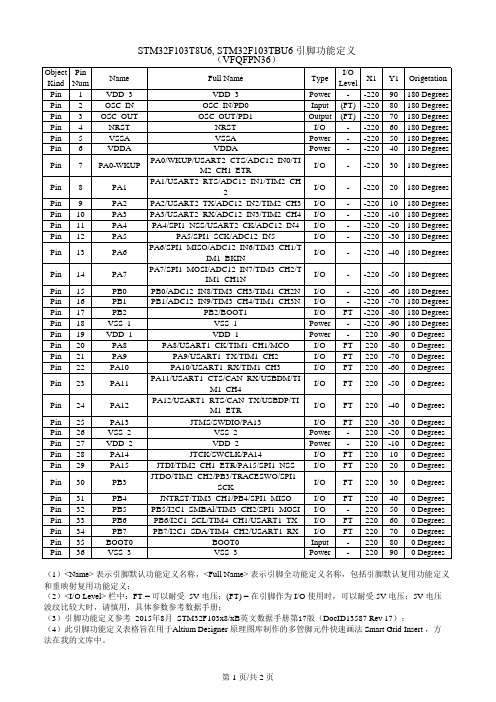
STM32 选型参考
STM32F107RCT6 STM32F107VBT6 STM32F107VCT6
LQFP64 LQFP100 LQFP100
64 100 100
Flash Flash Flas48K 64K
Data E2PROM (Bytes)
A/D Converter Inputs
STM32F103 Cortex Performance Line 72 MHz
STM32F103C4T6A STM32F103C6T6A STM32F103C8T6 STM32F103CBT6 STM32F103R4H6A STM32F103R4T6A STM32F103R6H6A STM32F103R6T6A STM32F103R8H6 STM32F103R8T6 STM32F103RBH6 STM32F103RBT6 STM32F103RCT6 STM32F103RCY6 LQFP48 LQFP48 LQFP48 LQFP48 LFBGA64 LQFP64 LFBGA64 LQFP64 LFBGA64 LQFP64 BGA64 LQFP64 LQFP64 CSP64 48 48 48 48 64 64 64 64 64 64 64 64 64 64 Flash Flash Flash Flash Flash Flash Flash Flash Flash Flash Flash Flash Flash Flash 16K 32K 64K 128K 16K 16K 32K 32K 64K 64K 128K 128K 256K 256K 6K 10K 20K 20K 6K 6K 10K 10K 20K 20K 20K 20K 48K 48K
For all STM32F100 Value Line quote requests, please contact Divisional Marketing *** Codification is temporarily assigned. Could change before official launch
STM32F103引脚功能定义资料

2.1 器件一览表二:器件功能和配置(STM32F103xx增强型)图一.STM32F103xx增强型模块框图工作温度=-40至+105°C (结温达125°C) AF: I/O口上的其他功能3管脚定义图二.STM32F103xx增强型VFQFPN36管脚图四.STM32F103xx增强型LQFP64管脚表三. 管脚定义表三.管脚定义(续)注:1. I :输入, O:输出, S:电源, HiZ:高阻2. FT:兼容5V3. 其中部分功能仅在部分型号芯片中支持,具体信息请参考表2。
4. PC13,PC14和PC15引脚通过电源开关进行供电,因此这三个引脚作为输出引脚时有以下限制:9作为输出脚时只能工作在2MHz模式下9最大驱动负载为30pF9同一时间,三个引脚中只有一个引脚能作为输出引脚。
5. 仅在内嵌大等于64K Flash的型号中支持此类功能。
6. VFQFPN36封装的2号,3号引脚和LQFP48,LQFP64封装的5号,6号引脚在芯片复位后默认配置为OSC_IN和OSC_OUT功能脚。
软件可以重新设置这两个引脚为PD0和PD1功能脚。
但对于LQFP100封装,由于PD0和PD1为固有的功能脚,因此没有必要再由软件进行设置。
更多详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
PD0和PD1作为输出引脚只能工作在50MHz模式下。
7. 此类复用功能能够由软件配置到其他引脚上,详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
4存储器映像图七存储器图5电气特性请参考英文版数据手册6封装参数请参考英文版数据手册7订货代码表四. 订货代码型号闪存存储器K字节SRAM存储器K字节封装STM32F103C6T6 32 10STM32F103C8T6 64 20STM32F103CBT6 128 20LQFP48STM32F103R6T6 32 10STM32F103R8T6 64 20STM32F103RBT6 128 20LQFP64STM32F103V8T6 64 20STM32F103VBT6 128 20LQFP100STM32F103V8H6 64 20STM32F103VBH6 128 20LFBGA100STM32F103T6U6 32 6STM32F103T8U6 64 10VFQFPN367.1 后续的产品系列后续的STM32F103xx增强型系列产品将会有更广泛的型号选择,芯片将会有更大的封装尺寸并内嵌多达512KB的Flash和48KB的SRAM。
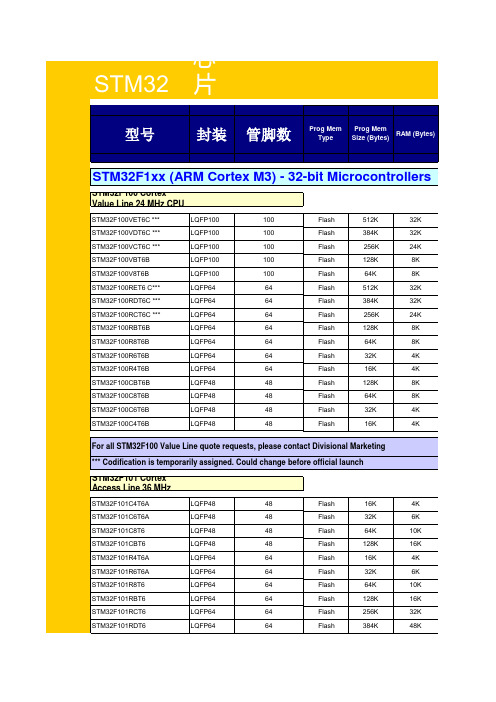
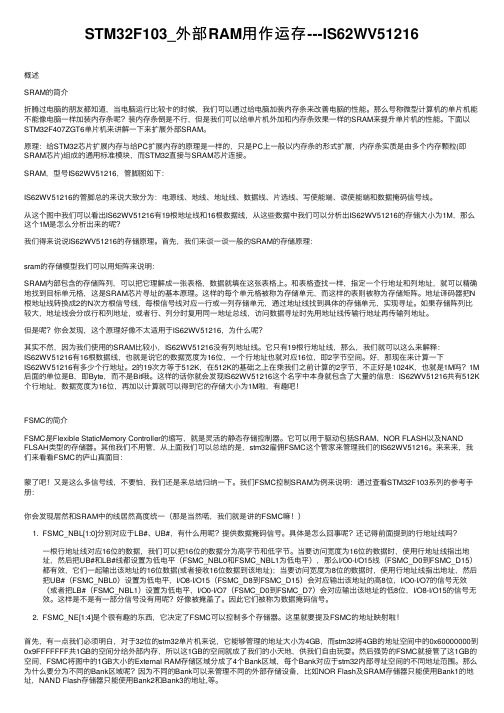
STM32F103_外部RAM用作运存---IS62WV51216
STM32F103_外部RAM⽤作运存---IS62WV51216概述SRAM的简介折腾过电脑的朋友都知道,当电脑运⾏⽐较卡的时候,我们可以通过给电脑加装内存条来改善电脑的性能。
那么号称微型计算机的单⽚机能不能像电脑⼀样加装内存条呢?装内存条倒是不⾏,但是我们可以给单⽚机外加和内存条效果⼀样的SRAM来提升单⽚机的性能。
下⾯以STM32F407ZGT6单⽚机来讲解⼀下来扩展外部SRAM。
原理:给STM32芯⽚扩展内存与给PC扩展内存的原理是⼀样的,只是PC上⼀般以内存条的形式扩展,内存条实质是由多个内存颗粒(即SRAM芯⽚)组成的通⽤标准模块,⽽STM32直接与SRAM芯⽚连接。
SRAM,型号IS62WV51216,管脚图如下:IS62WV51216的管脚总的来说⼤致分为:电源线、地线、地址线、数据线、⽚选线、写使能端、读使能端和数据掩码信号线。
从这个图中我们可以看出IS62WV51216有19根地址线和16根数据线,从这些数据中我们可以分析出IS62WV51216的存储⼤⼩为1M,那么这个1M是怎么分析出来的呢?我们得来说说IS62WV51216的存储原理。
⾸先,我们来谈⼀谈⼀般的SRAM的存储原理:sram的存储模型我们可以⽤矩阵来说明:SRAM内部包含的存储阵列,可以把它理解成⼀张表格,数据就填在这张表格上。
和表格查找⼀样,指定⼀个⾏地址和列地址,就可以精确地找到⽬标单元格,这是SRAM芯⽚寻址的基本原理。
这样的每个单元格被称为存储单元,⽽这样的表则被称为存储矩阵。
地址译码器把N 根地址线转换成2的N次⽅根信号线,每根信号线对应⼀⾏或⼀列存储单元,通过地址线找到具体的存储单元,实现寻址。
如果存储阵列⽐较⼤,地址线会分成⾏和列地址,或者⾏、列分时复⽤同⼀地址总线,访问数据寻址时先⽤地址线传输⾏地址再传输列地址。
但是呢?你会发现,这个原理好像不太适⽤于IS62WV51216,为什么呢?其实不然,因为我们使⽤的SRAM⽐较⼩,IS62WV51216没有列地址线。
遥控纸飞机实现方案

遥控纸飞机设计方案1.系统总体结构框图系统总体可分为两个部分本体部分和APP控制部分。
设计中我主要负责飞机本体部分的设计。
飞机本体部分又可分为以下几个模块:1、CC2541蓝牙4.0 BLE最小系统;2、直流电机控制模块;3、方向舵控制模块;4、电源管理和锂电池充电模块;图1 系统总体设计框图2.器件选型主控芯片:STM32F103T8U6蓝牙通信芯片:CC2541;2.4-GHz Bluetooth™低能耗和和私有片载系统。
空心杯电机驱动芯片:场效应管,MOSFET N沟道,IRLML2502TRPBF 电磁舵机驱动芯片:场效应管,MOSFET N沟道,IRLML2502TRPBF电源管理芯片:TP4056电磁舵机;方向舵空心杯电机;螺旋桨3.工作过程简介本体的主控芯片,即要完成无线通信,又要实现速度和方向控制。
CC2541 将领先RF 收发器的出色性能和一个业界标准的增强型8051 MCU、系统内可编程闪存存储器、8kB RAM 和很多其它功能强大的特性和外设组合在一起。
正好符合纸飞机本体控制模块的功能要求。
通过控制直流电机的转速来实现速度控制,具体通过CC2541利用PWM进行速度调节。
通过控制电磁舵机的电流方向实现方向舵控制,电磁舵机是是利用电磁感应定律制成的,通过电磁舵机驱动模块控制电流方向,从而控制方向舵的转向。
基于OSAL和BLE协议栈实现蓝牙无线通信的软件程序设计。
4.时间进度安排2014.12~2015.1 :查阅相关的图书及文献资料熟悉课题的研究背景及现状,给出总体设计方案。
2015.1:完成开题报告,制定设计方案及进度规划。
2015.1~2015.2:系统学习CC2541芯片的知识,同时了解OSAL和BLE协议栈的使用。
2015.2~2015.3:设计出具体方案实现方法,采购元器件;并完成本体部分的硬件搭建。
2015.3~2015.4:设计出详细的实现流程,进行初期的模块程序设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Doc ID 13587 Rev 11
1/2F103x8, STM32F103xB
Contents
1 2 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Features
■
Core: ARM 32-bit Cortex™-M3 CPU – 72 MHz maximum frequency, 1.25 DMIPS/MHz (Dhrystone 2.1) performance at 0 wait state memory access – Single-cycle multiplication and hardware division Memories – 64 or 128 Kbytes of Flash memory – 20 Kbytes of SRAM Clock, reset and supply management – 2.0 to 3.6 V application supply and I/Os – POR, PDR, and programmable voltage detector (PVD) – 4-to-16 MHz crystal oscillator – Internal 8 MHz factory-trimmed RC – Internal 40 kHz RC – PLL for CPU clock – 32 kHz oscillator for RTC with calibration Low power – Sleep, Stop and Standby modes – VBAT supply for RTC and backup registers 2 x 12-bit, 1 µs A/D converters (up to 16 channels) – Conversion range: 0 to 3.6 V – Dual-sample and hold capability – Temperature sensor DMA – 7-channel DMA controller – Peripherals supported: timers, ADC, SPIs, I2Cs and USARTs Up to 80 fast I/O ports – 26/37/51/80 I/Os, all mappable on 16 external interrupt vectors and almost all 5 V-tolerant
2.3.1 2.3.2 2.3.3 2.3.4 2.3.5 2.3.6 2.3.7 2.3.8 2.3.9 2.3.10 2.3.11 2.3.12 2.3.13 2.3.14 2.3.15 2.3.16 2.3.17 2.3.18 2.3.19 2.3.20 2.3.21 2.3.22 2.3.23 2.3.24 ARM® Cortex™-M3 core with embedded Flash and SRAM . . . . . . . . . 12 Embedded Flash memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 CRC (cyclic redundancy check) calculation unit . . . . . . . . . . . . . . . . . . 12 Embedded SRAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 Nested vectored interrupt controller (NVIC) . . . . . . . . . . . . . . . . . . . . . . 12 External interrupt/event controller (EXTI) . . . . . . . . . . . . . . . . . . . . . . . 13 Clocks and startup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 Boot modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 Power supply schemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 Power supply supervisor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 Voltage regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 Low-power modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 DMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 RTC (real-time clock) and backup registers . . . . . . . . . . . . . . . . . . . . . . 15 Timers and watchdogs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 I²C bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Universal synchronous/asynchronous receiver transmitter (USART) . . 17 Serial peripheral interface (SPI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Controller area network (CAN) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Universal serial bus (USB) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 GPIOs (general-purpose inputs/outputs) . . . . . . . . . . . . . . . . . . . . . . . . 18 ADC (analog-to-digital converter) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 Temperature sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 Serial wire JTAG debug port (SWJ-DP) . . . . . . . . . . . . . . . . . . . . . . . . . 18
Part number STM32F103C8, STM32F103R8 STM32F103V8, STM32F103T8 STM32F103RB STM32F103VB, STM32F103CB
■
■
■
■
■ ■
■
Table 1.
Reference
■
STM32F103x8 STM32F103xB
September 2009
STM32F103x8 STM32F103xB
Medium-density performance line ARM-based 32-bit MCU with 64 or 128 KB Flash, USB, CAN, 7 timers, 2 ADCs, 9 communication interfaces
■ ■
VFQFPN36 6 × 6 mm
LQFP100 14 × 14 m LQFP64 10 × 10 m LQFP48 7 × 7 m
BGA100 10 × 10 mm BGA64 5 × 5 mm
■
Debug mode – Serial wire debug (SWD) & JTAG interfaces 7 timers – Three 16-bit timers, each with up to 4 IC/OC/PWM or pulse counter and quadrature (incremental) encoder input – 16-bit, motor control PWM timer with deadtime generation and emergency stop – 2 watchdog timers (Independent and Window) – SysTick timer: a 24-bit downcounter Up to 9 communication interfaces – Up to 2 x I2C interfaces (SMBus/PMBus) – Up to 3 USARTs (ISO 7816 interface, LIN, IrDA capability, modem control) – Up to 2 SPIs (18 Mbit/s) – CAN interface (2.0B Active) – USB 2.0 full-speed interface CRC calculation unit, 96-bit unique ID Packages are ECOPACK® Device summary