【CN109870750A】一种仿生人眼自动对焦光学系统【专利】
【CN109998599A】一种基于AI技术的光声双模成像眼底疾病诊断系统【专利】
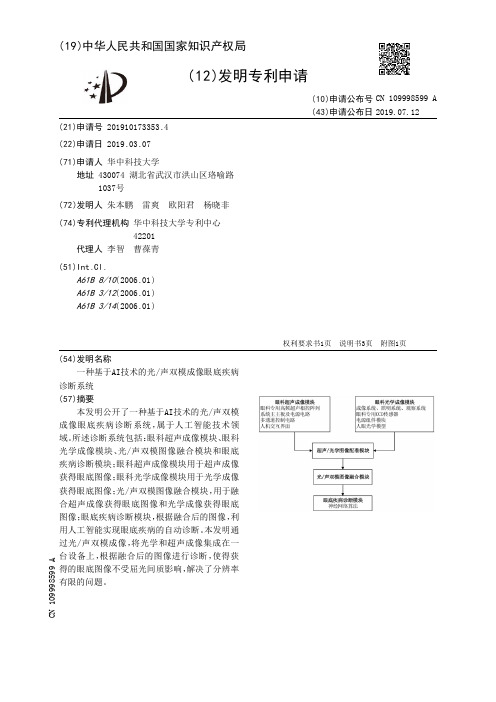
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910173353.4(22)申请日 2019.03.07(71)申请人 华中科技大学地址 430074 湖北省武汉市洪山区珞喻路1037号(72)发明人 朱本鹏 雷爽 欧阳君 杨晓非 (74)专利代理机构 华中科技大学专利中心42201代理人 李智 曹葆青(51)Int.Cl.A61B 8/10(2006.01)A61B 3/12(2006.01)A61B 3/14(2006.01)(54)发明名称一种基于AI技术的光/声双模成像眼底疾病诊断系统(57)摘要本发明公开了一种基于AI技术的光/声双模成像眼底疾病诊断系统,属于人工智能技术领域。
所述诊断系统包括:眼科超声成像模块、眼科光学成像模块、光/声双模图像融合模块和眼底疾病诊断模块;眼科超声成像模块用于超声成像获得眼底图像;眼科光学成像模块用于光学成像获得眼底图像;光/声双模图像融合模块,用于融合超声成像获得眼底图像和光学成像获得眼底图像;眼底疾病诊断模块,根据融合后的图像,利用人工智能实现眼底疾病的自动诊断。
本发明通过光/声双模成像,将光学和超声成像集成在一台设备上,根据融合后的图像进行诊断,使得获得的眼底图像不受屈光间质影响,解决了分辨率有限的问题。
权利要求书1页 说明书3页 附图1页CN 109998599 A 2019.07.12C N 109998599A权 利 要 求 书1/1页CN 109998599 A1.一种基于AI技术的光/声双模成像眼底疾病诊断系统,其特征在于,所述诊断系统包括:眼科超声成像模块、眼科光学成像模块、光/声双模图像融合模块和眼底疾病诊断模块;所述眼科超声成像模块用于超声成像获得眼底图像;所述眼科光学成像模块用于光学成像获得眼底图像;所述光/声双模图像融合模块,用于融合超声成像获得眼底图像和光学成像获得眼底图像;所述眼底疾病诊断模块,根据融合后的图像,利用人工智能实现眼底疾病的自动诊断。
【CN109968368A】一种机器人仿生眼部【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910267256.1(22)申请日 2019.04.03(71)申请人 广东工业大学地址 510062 广东省广州市大学城外环西路100号(72)发明人 闫靖予 朱海飞 陈宏楷 许崇铭 邱榆 (74)专利代理机构 广东广信君达律师事务所44329代理人 黄李军 杨晓松(51)Int.Cl.B25J 11/00(2006.01)(54)发明名称一种机器人仿生眼部(57)摘要一种机器人仿生眼部,包括主框架、左眼球、右眼球以及眼球支架,左眼球和右眼球设在眼球支架上,眼球支架设在主框架的前端;还包括眼球水平转动机构和眼球竖向转动机构;眼球水平转动机构包括设在主框架上的等腰双摇杆机构,主框架上设有用于驱动等腰双摇杆机构转动的水平驱动单元,左眼球后端设有左驱动杆,右眼球后端设有右驱动杆,左驱动杆通过左连接件与等腰双摇杆机构的左摇杆相连接,右驱动杆通过右连接件与等腰双摇杆机构的右摇杆相连接;眼球竖向转动机构包括竖向驱动单元,竖向驱动单元通过驱动左驱动杆和右驱动杆上下移动而带动左眼球和右眼球上下转动。
本发明降低了电机数量,使得眼球的转动更加真实和传神。
权利要求书2页 说明书5页 附图7页CN 109968368 A 2019.07.05C N 109968368A权 利 要 求 书1/2页CN 109968368 A1.一种机器人仿生眼部,其特征在于:包括主框架、左眼球、右眼球以及眼球支架,左眼球和右眼球设在眼球支架上,眼球支架设在主框架的前端;还包括眼球水平转动机构和眼球竖向转动机构;眼球水平转动机构包括设在主框架上的等腰双摇杆机构,主框架上设有用于驱动等腰双摇杆机构转动的水平驱动单元,左眼球后端设有左驱动杆,右眼球后端设有右驱动杆,左驱动杆通过左连接件与等腰双摇杆机构的左摇杆相连接,右驱动杆通过右连接件与等腰双摇杆机构的右摇杆相连接;眼球竖向转动机构包括竖向驱动单元,竖向驱动单元通过驱动左驱动杆和右驱动杆上下移动而带动左眼球和右眼球上下转动。
【CN109646259A】一种智能变焦视光训练设备【专利】
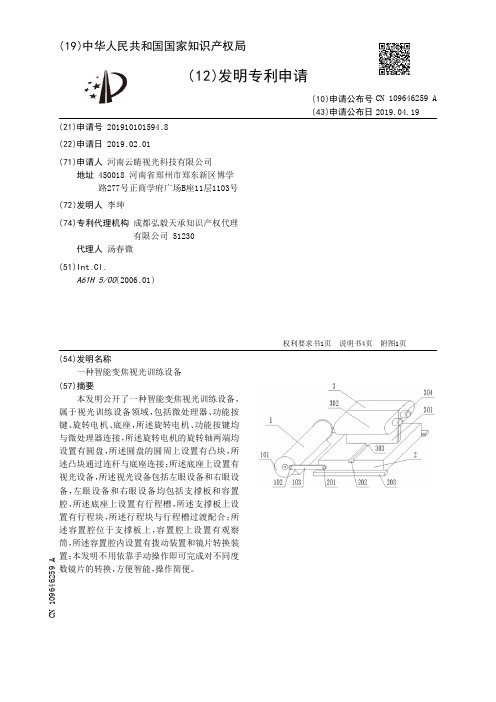
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910101594.8(22)申请日 2019.02.01(71)申请人 河南云睛视光科技有限公司地址 450018 河南省郑州市郑东新区博学路277号正商学府广场B座11层1103号(72)发明人 李坤 (74)专利代理机构 成都弘毅天承知识产权代理有限公司 51230代理人 汤春微(51)Int.Cl.A61H 5/00(2006.01)(54)发明名称一种智能变焦视光训练设备(57)摘要本发明公开了一种智能变焦视光训练设备,属于视光训练设备领域,包括微处理器、功能按键、旋转电机、底座,所述旋转电机、功能按键均与微处理器连接,所述旋转电机的旋转轴两端均设置有圆盘,所述圆盘的圆周上设置有凸块,所述凸块通过连杆与底座连接;所述底座上设置有视光设备,所述视光设备包括左眼设备和右眼设备,左眼设备和右眼设备均包括支撑板和容置腔,所述底座上设置有行程槽,所述支撑板上设置有行程块,所述行程块与行程槽过渡配合;所述容置腔位于支撑板上,容置腔上设置有观察筒,所述容置腔内设置有拨动装置和镜片转换装置;本发明不用依靠手动操作即可完成对不同度数镜片的转换,方便智能,操作简便。
权利要求书1页 说明书4页 附图1页CN 109646259 A 2019.04.19C N 109646259A权 利 要 求 书1/1页CN 109646259 A1.一种智能变焦视光训练设备,其特征在于:包括微处理器、功能按键、旋转电机(1)、底座(2),所述旋转电机(1)、功能按键均与微处理器连接,所述旋转电机(1)的旋转轴两端均设置有圆盘(101),所述圆盘(101)的圆周上设置有第一凸块(102),所述第一凸块(102)上连接有连杆(103),所述底座(2)的两侧设置有第二凸块(201),所述连杆(103)的一端与第一凸块(102)连接,所述连杆(103)的另一端与第二凸块(201)转动连接;所述底座(2)上设置有视光设备(3),所述视光设备(3)包括左眼设备和右眼设备,左眼设备和右眼设备均包括支撑板(301)和容置腔(302),所述底座(2)上设置有行程槽(202),所述支撑板(301)上设置有行程块(303),所述行程块(303)与行程槽(202)过渡配合;所述容置腔(302)位于支撑板(301)上,容置腔(302)上设置有观察筒(304),所述容置腔(302)内设置有拨动装置和镜片转换装置,所述拨动装置包括与微处理器连接的微型旋转电机(4),所述微型旋转电机的主轴与容置腔(302)的底部垂直,所述微型旋转电机的主轴上连接有拨片(5);所述镜片转换装置包括旋转轴(6)和镜片放置台(7),所述旋转轴(6)固定于容置腔(302)的底部,所述镜片放置台(7)为圆柱形,镜片放置台(7)与旋转轴(6)转动连接,所述镜片放置台(7)的圆周上均匀设置有若干个镜片底座(701),镜片底座(701)上设置有光学镜片(702),光学镜片(702)的透光方向平行于水平面,每个镜片底座(701)上设置的光学镜片(702)的度数不同;镜片底座(701)排列形成的圆周与拨片(5)的旋转路径相交。
一种仿生机器人眼睛[发明专利]
![一种仿生机器人眼睛[发明专利]](https://img.taocdn.com/s3/m/3280b8f1227916888586d747.png)
专利名称:一种仿生机器人眼睛专利类型:发明专利
发明人:曾伟鹏
申请号:CN201710069361.5申请日:20170208
公开号:CN106826928A
公开日:
20170613
专利内容由知识产权出版社提供
摘要:本发明公开了一种仿生机器人眼睛,它涉及机器人视觉的硬件装置技术领域;所述
CCD/CMOS摄像头的外侧设置有可移动眼球体,所述CCD/CMOS摄像头的后侧设置有电磁铁,所述电磁铁的一侧设置有电磁线圈感应基板,所述电磁铁与电磁线圈感应基板相配合实现可控移动,所述电磁线圈感应基板安装在眼睛球形内壳上,所述眼睛球形内壳的外侧设置有眼睛球形外壳,所述可移动眼球体设置在眼睛球形外壳内;本发明通过控制基板上局部线圈产生磁力从而驱动眼球瞳孔可以在平面或球形面上全方位的走动,实现仿生机器人眼睛的目的。
申请人:深圳市大伟机器人科技有限公司
地址:518000 广东省深圳市南山区南山街道南光路南光村8栋503室
国籍:CN
更多信息请下载全文后查看。
一种用于光学投影光刻机的自动对焦装置及自动对焦方法[发明专利]
![一种用于光学投影光刻机的自动对焦装置及自动对焦方法[发明专利]](https://img.taocdn.com/s3/m/a0a30bfac281e53a5902ffdf.png)
专利名称:一种用于光学投影光刻机的自动对焦装置及自动对焦方法
专利类型:发明专利
发明人:黄燕燕,王笑冰,阚凌雁,柯华恒
申请号:CN202010242592.3
申请日:20200331
公开号:CN111352310A
公开日:
20200630
专利内容由知识产权出版社提供
摘要:本发明提供的用于光学投影光刻机的自动对焦装置,包括激光器、激光能量调节器、扩束器、准直透镜、叉丝、成像透镜、分光棱镜、监视系统透镜、监视系统、二向色镜、电子变焦透镜、投影微缩镜头、感光材料及光刻平台,所述感光材料位于所述光刻平台上,本发明提供的用于光学投影光刻机的自动对焦装置及对焦方法,通过改变电子变焦透镜的焦距来对焦,调节响应速度快,与机械对焦相比可以快速地使光刻机的光刻图像重新对准焦,适用于光刻机需要快速工作的要求。
另外,本发明还提供了一种用于光学投影光刻机的自动对焦方法。
申请人:深圳市深大极光科技有限公司
地址:518132 广东省深圳市光明新区田寮社区聚汇工业园1栋
国籍:CN
代理机构:深圳市科进知识产权代理事务所(普通合伙)
代理人:曹卫良
更多信息请下载全文后查看。
一种自动对焦算法[发明专利]
![一种自动对焦算法[发明专利]](https://img.taocdn.com/s3/m/775d6478ce84b9d528ea81c758f5f61fb7362828.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201810678606.9(22)申请日 2018.06.27(71)申请人 上海理工大学地址 200093 上海市杨浦区军工路516号(72)发明人 江旻珊 阳婷 徐晓立 张学典 (74)专利代理机构 上海德昭知识产权代理有限公司 31204代理人 郁旦蓉(51)Int.Cl.H04N 5/232(2006.01)(54)发明名称一种自动对焦算法(57)摘要本发明公开了一种自动对焦算法,包括如下步骤:采集目标物体的两幅连续的对焦图像,分别画出两幅对焦图像的对焦评价函数的曲线图;找出两幅曲线图中的峰值点F 1和F 2,然后将两幅曲线图中的曲线进行拟合,得到拟合曲线后找出峰值点F 0;比较F 1点和F 2点所在聚焦镜头的位置的大小,以较小位置点为起始点,较大位置点为终点,使聚焦镜头以步长SW从起始点走到终点,并记录下对焦评价函数的最大值及聚焦镜头的位置;反复在最大值点附近来回搜索,直至步进电机的步长减小到设定的步长时结束搜索,此时聚焦镜头停止在对焦评价函数的最大值F mn 处且聚焦镜头的位置为W mn ;比较F mn 和F 0的大小,若|F mn -F 0|≤δ,则对焦过程结束,若|F mn -F 0|>δ,则减小预先设定的步长继续搜索。
权利要求书2页 说明书4页 附图2页CN 108769533 A 2018.11.06C N 108769533A1.一种自动对焦算法,其特征在于,包括如下步骤:步骤1,采集目标物体的两幅连续的对焦图像分别为第一对焦图像和第二对焦图像,预先设定步进电机的步长为SW0、行程为L,然后利用sobel梯度函数分别计算出所述第一对焦图像的对焦评价函数值和所述第二对焦图像的对焦评价函数值并分别画出所述第一对焦图像的对焦评价函数的曲线图和所述第二对焦图像的对焦评价函数的曲线图;步骤2,找出所述第一对焦图像的对焦评价函数的曲线图中的曲线峰值点F1和所述第二对焦图像的对焦评价函数的曲线图中的曲线峰值点F2,然后将所述两幅曲线图中的曲线进行曲线拟合,得到拟合曲线,并找出所述拟合曲线的峰值点F0;步骤3,比较F1点和F2点所在聚焦镜头的位置W F1和W F2的大小,以较小位置点为起始点Ⅰ,以较大位置点为终点Ⅰ,并通过所述步进电机驱动聚焦镜头先以步长SW从所述起始点Ⅰ走到所述终点Ⅰ,并记录下所述对焦评价函数的最大值F m0及其所述聚焦镜头的位置W m0;步骤4,减小所述步进电机的步长,使所述聚焦镜头回到所述对焦评价函数的最大值位置的前一站F m0-1并以此为起始点Ⅱ,并以所述对焦评价函数的最大值位置的后一站F m0+1为终点Ⅱ,由所述步进电机驱动所述聚焦镜头从所述起始点Ⅱ走到所述终点Ⅱ,并记录下这一过程中所述对焦评价函数的最大值F m1及其所述聚焦镜头的位置W m1;步骤5,重复步骤4直至所述步进电机的步长减小到设定的所述步长SW0或小于所述步长SW0时,搜索结束,此时所述聚焦镜头停止在所述对焦评价函数的最大值F mn处且所述聚焦镜头的位置为W mn;步骤6,比较F mn和F0的大小,若|F mn-F0|≤δ,则对焦过程结束,若|F mn-F0|>δ,则减小所述预先设定的步长SW0并回到所述步骤3,其中,所述步骤6中的δ为阈值条件。
【CN109870790A】一种远心镜头【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910308269.9(22)申请日 2019.04.17(71)申请人 东莞市神州视觉科技有限公司地址 523000 广东省东莞市东城区牛山兴华工业园F栋(72)发明人 王锦峰 何京 (74)专利代理机构 北京品源专利代理有限公司11332代理人 胡彬(51)Int.Cl.G02B 13/22(2006.01)G02B 7/02(2006.01)(54)发明名称一种远心镜头(57)摘要本发明公开了一种远心镜头,属于光学器件技术领域,包括镜筒,从物面侧到像面侧,镜筒内依次设置有物侧透镜组、光阑和像侧透镜组,光阑位于物侧透镜组和像侧透镜组的焦点位置,远心镜头还包括同轴光源,同轴光源包括环形发光件,环形发光件套设于光阑上。
本发明提出的远心镜头,通过将同轴光源设置在镜筒内部,与现有技术相比,能够避免半透半反镜对光照强度的削弱,提高对光线的利用率,进而使得光照强度得到提高,在同样的照明条件下,使得由物侧透镜返回来的光照强度提高150%,有利于提高成像效果。
而且,能够避免光源的发热严重,影响远心镜头的正常工作。
此外,与现有技术相比,镜筒上不需要额外开设通光孔,降低了镜筒的加工难度。
权利要求书1页 说明书4页 附图2页CN 109870790 A 2019.06.11C N 109870790A权 利 要 求 书1/1页CN 109870790 A1.一种远心镜头,包括镜筒,其特征在于,从物面侧到像面侧,所述镜筒内依次设置有物侧透镜组(2)、光阑(4)和像侧透镜组(5),所述光阑(4)位于所述物侧透镜组(2)和所述像侧透镜组(5)的焦点位置,所述远心镜头还包括同轴光源(3),所述同轴光源(3)包括环形发光件(31),所述环形发光件(31)套设于所述光阑(4)上。
2.根据权利要求1所述的远心镜头,其特征在于,所述环形发光件(31)包括环形电路板(311),所述环形电路板(311)上沿其径向由内至外设置有多圈LED灯(312)。
世界首款自动变焦眼镜申请275项专利
世界首款自动变焦眼镜申请275项专利
作者:暂无
来源:《创新科技》 2011年第5期
这款名叫emPower的眼镜看上去跟普通眼镜没有什么差别,但它的研发耗时12年,设计者共提出了275项专利申请,售价预计在6 500人民币到1.4万人民币之间。
到底是什么让它如此与众不同呢?奥秘就在于里面装有全世界首对电子对焦镜片。
电子对焦镜片中夹有一层液晶薄膜,接到指令后液晶分子的排列顺序将进行相应调整,从而实现自动变焦。
佩戴者只要稍稍低头或用手触摸镜框,就可以在不同模式(例如看书模式和远眺模式)间切换从而达到最佳的视觉感受。
戴传统眼镜低头看到的会是变形的地面,而戴emPower眼镜后看到的物体就不会是变形的。
这款眼镜在2011年3月举行的美国东部光学博览会上亮相,并将于今年夏天在美国市场出售。
制造商PixelOptics在介绍这款眼镜时说:“在原有设计的基础上,正式出售时的emPower眼镜不仅将有多种模式可供用户调节,而且外观时尚、款式型号多样,还有多种颜色可供消费者选择。
”
这款电子眼镜充电8小时后可工作2至3天。
它唯一的缺点大概就是价格昂贵了些。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910205191.8
(22)申请日 2019.03.18
(71)申请人 北京信息科技大学
地址 100085 北京市海淀区清河小营东路
12号
(72)发明人 祝连庆 孟晓辰 娄小平 樊凡
潘志康 刘超 董明利
(74)专利代理机构 北京市科名专利代理事务所
(特殊普通合伙) 11468
代理人 陈朝阳
(51)Int.Cl.
G02B 3/14(2006.01)
G02B 7/09(2006.01)
G02B 7/28(2006.01)
G03B 13/36(2006.01)
(54)发明名称
一种仿生人眼自动对焦光学系统
(57)摘要
一种仿生人眼自动对焦光学系统,其特征在
于,包括一定焦透镜组镜头,所述定焦透镜组镜
头的前方同轴地设有一液体变焦镜头,定焦透镜
组镜头的后方设有光电探测面;所述的液体变焦
镜头包括曲率可变的弹性薄膜,弹性薄膜内充满
有光学液体,所述液体变焦镜头连接有控制液体
进出的变焦控制装置。
权利要求书1页 说明书3页 附图3页CN 109870750 A 2019.06.11
C N 109870750
A
权 利 要 求 书1/1页CN 109870750 A
1.一种仿生人眼自动对焦光学系统,其特征在于,包括一定焦透镜组镜头,所述定焦透镜组镜头的前方同轴地设有一液体变焦镜头,定焦透镜组镜头的后方设有光电探测面;所述的液体变焦镜头包括曲率可变的弹性薄膜,弹性薄膜内充满有光学液体,所述液体变焦镜头连接有控制液体进出的变焦控制装置;
设在对焦完成时液体变焦镜头和定焦透镜组镜头整体的焦距为f,物点距离系统物方焦点F的距离为x,像点距离系统像方焦点F’的距离为x’;在对焦时x和x’为已知数,采用如下公式可计算出对焦完成时的整体焦距f:
x'=f2/x
再根据定焦透镜组镜头的焦距即可得知对焦完成时的液体变焦镜头焦距,变焦控制装置控制液体进出使液体变焦镜头达到所述焦距即完成对焦。
2.如权利要求1所述的一种仿生人眼自动对焦光学系统,其特征在于,所述变焦控制装置由电流驱动,液体变焦镜头的光焦度与变焦控制装置电流的大小成正比。
2。