三大电机控制方案之DSP篇(1):TMS320F28335
TMS320F28335中文资料资料讲解
T M S320F28335中文资料TMS320F28335中文资料TMS320F28335采用176引脚LQFP四边形封装,其功能结构参见参考文献。
其主要性能如下:高性能的静态CMOS技术,指令周期为6.67 ns,主频达150 MHz;高性能的32位CPU,单精度浮点运算单元(FPU),采用哈佛流水线结构,能够快速执行中断响应,并具有统一的内存管理模式,可用C/C++语言实现复杂的数学算法;6通道的DMA控制器;片上256 Kxl6的Flash存储器,34 Kxl6的SARAM存储器.1 Kx16 OTPROM和8 Kxl6的Boot ROM。
其中Flash,OTPROM,16 Kxl6的SARAM均受密码保护;控制时钟系统具有片上振荡器,看门狗模块,支持动态PLL调节,内部可编程锁相环,通过软件设置相应寄存器的值改变CPU的输入时钟频率;8个外部中断,相对TMS320F281X系列的DSP,无专门的中断引脚。
GPI00~GPI063连接到该中断。
GPI00一GPI031连接到XINTl,XINT2及XNMI外部中断,GPl032~GPI063连接到XINT3一XINT7外部中断;支持58个外设中断的外设中断扩展控制器(PIE),管理片上外设和外部引脚引起的中断请求;增强型的外设模块:18个PWM输出,包含6个高分辨率脉宽调制模块(HRPWM)、6个事件捕获输入,2通道的正交调制模块(QEP);3个32位的定时器,定时器0和定时器1用作一般的定时器,定时器0接到PIE模块,定时器1接到中断INTl3;定时器2用于DSP/BIOS的片上实时系统,连接到中断INTl4,如果系统不使用DSP/BIOS,定时器2可用于一般定时器;串行外设为2通道CAN模块、3通道SCI模块、2个McBSP(多通道缓冲串行接口)模块、1个SPI模块、1个I2C主从兼容的串行总线接口模块;12位的A/D转换器具有16个转换通道、2个采样保持器、内外部参考电压,转换速度为80 ns,同时支持多通道转换;88个可编程的复用GPIO引脚;低功耗模式;1.9 V内核,3.3 V I/O供电;符合IEEEll49.1标准的片内扫描仿真接口(JTAG);TMS320F28335的存储器映射需注意以下几点:片上外设寄存器块0~3只能用于数据存储区,用户不能在该存储区内写入程序。
基于TMS320F28335DSP的三相电动机控制器的设计

基于TMS320F28335DSP的三相电动机控制器的设计概述:速度闭环控制:力矩控制:力矩控制是根据应用的需求对电动机的力矩进行精确控制。
在本设计中,我们将采用矢量控制算法来实现力矩控制。
该算法通过分解电动机的电流和磁场,将电动机的转矩分解为电磁转矩和负载转矩两部分,并通过调整电流的大小和相位来实现对电磁转矩的控制。
硬件设计:硬件设计包括电动机驱动电路、传感器电路和DSP开发板的连接。
为了驱动三相电动机,我们需要使用H桥电路来控制电动机的转向和速度。
传感器电路用于实时采集电动机的转速,并将其反馈给DSP控制器。
最后,我们需要将DSP控制器与电动机驱动电路和传感器电路进行连接,以实现数据的传输和控制。
软件设计:软件设计主要包括初始化配置、速度闭环控制和力矩控制。
在初始化配置中,我们需要对DSP控制器进行初始化设置,包括PWM模块的配置、定时器模块的配置和中断处理函数的设置。
在速度闭环控制中,我们需要编写代码来实现速度的反馈控制,包括定时器的中断处理函数和占空比的调整逻辑。
在力矩控制中,我们需要编写代码来实现矢量控制算法,包括电流大小和相位的计算以及PWM信号的生成。
测试与调试:在完成硬件和软件设计后,我们需要进行测试和调试,以确保电动机控制器的正常运行和准确控制。
通过对不同转速和负载条件下的测试,我们可以评估控制器的性能,并进行必要的调整和优化。
结论:2. T. Xu, "Design of Digital Signal Processor (DSP) Control System for AC Induction Motor", International Journal of Electronics and Electrical Engineering, vol. 6, no. 3, pp. 20-24, 2024.。
28335概述
代表器件:TMS320F28335
C2000系列DSP
Roadmap
High-Precision Control
High-end Derivatives
Control Performance
F2812 179-u*BGA
F2810 176-LQFP 128-LQFP
Application specific versions
EMU1
8 6
P1 P8 2
VDUJVKL 84 Mil L9 TEST1 TEST2 81 K1 82 0 Pll
3.3 VFlash的内核电激引脚•该引脚应该一直连在3.3 V电源 上 测试引脚.为TI保留.使用时必须觝空(I/O〉
M7 测试引脚.为TI保留.使用时必须悬空(I/O〉 L7
XCLKOUT
引导(BOOT)ROM(8K X 16) 带有软件启动模式 数学运算表 16位或32位外部存储器扩展接口 多达2M的寻址空间 时钟和系统控制 支持动态改变锁相环的倍频系数 片上震荡器 看门狗定时模块
GPI00-GPI063能被设置位8个外部中断 外设中断扩展模块(PIE)支持58个外设中断 三个32位CPU定时器128位保护密码 保护Flash/OTP/ROM 防止系统固件被盗取 增强的电机控制外设 多达18通道的PWM输出
GPI05
EPWM3B MFSRA eCAPl GPI06 EPWM4A EPWMSYNCL EPWMSYNCO GPI07 EPWM4B MCLKRA
CANRXB
MDRB GPI014
GPI017 SPISOMIA CANRXB 6(1) 01)1018 SP1C1.KA SCITXDB CANRXA GPI019 SPISTEA SCIRXDB CANTXA GPIO20 cQEPl 八 MDXA CANTXB GPI021 cQEPlB MDRA CANRXB GPI022 65 P7 64 L7 63 K7 62 L6 28 J1
采用TMS320F28335 DSP实现六相SVPWM

机 为被控 对 象 , 已有 的三 相 S P 将 V WM 算 法推 广 到 六相 S P V WM, 出采 用 T 3 0 2 3 5D P作 为 提 MS 2 F 8 3 S 功 率驱动 器主 控 芯片 。 导 出实现 六相 S P 推 V WM 过 程 中 1 2个 扇 区 内 e WM 硬 件模 块控 制规律 和 实现 P 步骤 。搭 实验平 台实现 六相 S P V WM 控 制 方 法 , 实验 结 果表 明采 用 T 3 0 2 3 5 D P能 够 实现 MS 2 F 8 3 S
ph s V P M o to .Th x e i e t lr s ls i d c t h tt e TM S 2 28 3 ae S W c nr1 e e p rm n a e u t n i a e t a h 3 0F 3 5 DSP i u t b e t m - s s ia l o i pl m e tt e c m p e r c s f sx— a e S e n o h l x p o e s o i ph s VPW M , a d t e o p a e o m s o i - h s V P M r n h ut utw v f r f s x p a e S W ae
c re po d t he e o he t e r o r s n o t s ft h o y.
算 法 复 杂 的 六 相 S P M, 出波 形 与 理 论 相 符 合 。 VW 输
关键 词 : 多相 电机 ; VP S WM ; MS 2 F 8 3 数 字 信 号 处 理 器 T 3 0 2 3 5; 中 图 分 类 号 : H1 T 5 T 6; G6 文 献 标 识 码 : A
I p e e a in o x- ha e SVPW M t m l m nt to fSi p s wih TM S 0 8 3 S 32 F2 3 5 D P PAN H a— o g,FENG a, CHEN Li HUANG a— n ih n Hu n, H imi g, HUANG n - in Bi g q o g
基于TMS320F28335的伺服驱动器的设计
基于TMS320F28335的伺服驱动器的设计【摘要】本文设计了一种基于DSP的交流伺服电机驱动器的组成和总体设计方案。
该驱动器采用TMS320F28335为核心控制电路,设计完成了驱动电路和人机交互界面电路,同时完成了软件程序设计。
【关键词】DSP;伺服驱动器;TMS320F28335引言伺服驱动系统是机电一体化技术的重要组成部分,随着现代工业的快速发展,交流伺服系统逐渐成为工业伺服系统的主流,在数控机床、工业控制等自动化装备中得到广泛的应用。
本文介绍了一种基于TMS320F28335的伺服驱动器设计方案。
TMS320F28335是TI公司设计的一款数字信号处理器,其主要面向工业控制领域,特别适用于电机控制、运动控制等应用。
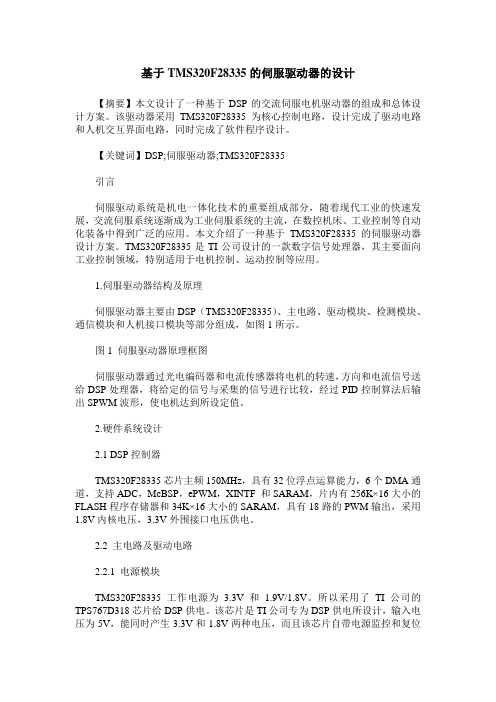
1.伺服驱动器结构及原理伺服驱动器主要由DSP(TMS320F28335)、主电路、驱动模块、检测模块、通信模块和人机接口模块等部分组成,如图1所示。
图1 伺服驱动器原理框图伺服驱动器通过光电编码器和电流传感器将电机的转速,方向和电流信号送给DSP处理器,将给定的信号与采集的信号进行比较,经过PID控制算法后输出SPWM波形,使电机达到所设定值。
2.硬件系统设计2.1 DSP控制器TMS320F28335芯片主频150MHz,具有32位浮点运算能力,6个DMA通道,支持ADC,McBSP,ePWM,XINTF 和SARAM,片内有256K×16大小的FLASH程序存储器和34K×16大小的SARAM,具有18路的PWM输出,采用1.8V内核电压,3.3V外围接口电压供电。
2.2 主电路及驱动电路2.2.1 电源模块TMS320F28335工作电源为 3.3V和 1.9V/1.8V。
所以采用了TI公司的TPS767D318芯片给DSP供电。
该芯片是TI公司专为DSP供电所设计,输入电压为5V,能同时产生3.3V和1.8V两种电压,而且该芯片自带电源监控和复位功能。
25_TI DSP入门芯片TMS320F28335
作为一个电子硬件工程师,怎么不能懂DSP,或者我们中有一些同学对DSP的理解还不是很多,今天就让我们给大家介绍一个DSP的入门芯片,来自TI的TMS320F28335。
相信看过了这一系列的内容,大家会对DSP有初步的了解。
TMS320F28335简介:TMS320F28335采用176引脚LQFP四边形封装,其功能结构参见参考文献。
其主要性能如下:高性能的静态CMOS技术,指令周期为6.67 ns,主频达150 MHz;高性能的32位CPU,单精度浮点运算单元(FPU),采用哈佛流水线结构,能够快速执行中断响应,并具有统一的内存管理模式,可用C/C++语言实现复杂的数学算法;6通道的DMA控制器;片上256 Kxl6的Flash存储器,34 Kxl6的SARAM存储器.1 Kx16 OTPROM和8 Kxl6的Boot ROM。
其中Flash,OTPROM,16 Kxl6的SARAM均受密码保护;控制时钟系统具有片上振荡器,看门狗模块,支持动态PLL调节,内部可编程锁相环,通过软件设置相应寄存器的值改变CPU的输入时钟频率;8个外部中断,相对TMS320F281X系列的DSP,无专门的中断引脚。
GPI00~GPI063连接到该中断。
GPI00一GPI031连接到XINTl,XINT2及XNMI外部中断,GPl032~GPI063连接到XINT3一XINT7外部中断;支持58个外设中断的外设中断扩展控制器(PIE),管理片上外设和外部引脚引起的中断请求;增强型的外设模块:18个PWM输出,包含6个高分辨率脉宽调制模块(HRPWM)、6个事件捕获输入,2通道的正交调制模块(QEP);3个32位的定时器,定时器0和定时器1用作一般的定时器,定时器0接到PIE模块,定时器1接到中断INTl3;定时器2用于DSP/BIOS的片上实时系统,连接到中断INTl4,如果系统不使用DSP/BIOS,定时器2可用于一般定时器;串行外设为2通道CAN模块、3通道SCI模块、2个McBSP(多通道缓冲串行接口)模块、1个SPI模块、1个I2C主从兼容的串行总线接口模块;12位的A/D转换器具有16个转换通道、2个采样保持器、内外部参考电压,转换速度为80 ns,同时支持多通道转换;88个可编程的复用GPIO引脚;低功耗模式;1.9 V内核,3.3 V I/O供电;符合IEEEll49.1标准的片内扫描仿真接口(JTAG);TMS320F28335的存储器映射需注意以下几点:片上外设寄存器块0~3只能用于数据存储区,用户不能在该存储区内写入程序。
tms320f28335编程实例

tms320f28335编程实例【原创实用版】目录1.TMS320F28335 简介2.TMS320F28335 编程实例的基本步骤3.TMS320F28335 编程实例的具体实现4.总结正文【1.TMS320F28335 简介】TMS320F28335 是一款 32 位定点数字信号处理器(DSP),广泛应用于各种实时控制系统中,如通信、音频处理、图像处理等领域。
TMS320F28335 具有高速、高效的运算能力,可实现大规模数据的快速处理。
同时,它还具有丰富的外设接口,方便与其他硬件设备相连。
【2.TMS320F28335 编程实例的基本步骤】编写 TMS320F28335 编程实例的基本步骤如下:(1)了解 TMS320F28335 的硬件结构和功能,确定处理器的工作模式。
(2)编写程序,实现所需功能。
编写程序时,需要使用 TMS320F28335 的编程语言,如 C 语言或汇编语言。
(3)将编写好的程序下载到 TMS320F28335 处理器中,进行运行测试。
(4)根据实际运行情况,对程序进行调试和优化,以满足实际应用需求。
【3.TMS320F28335 编程实例的具体实现】以一个简单的音频处理为例,具体实现如下:(1)首先,了解 TMS320F28335 的硬件结构,确定工作模式。
在本例中,我们使用 TMS320F28335 作为音频信号处理器,需要启用相应的外设接口,如串行通信接口、音频输入输出接口等。
(2)编写程序。
本例中,我们需要编写一个音频信号处理算法,如音频放大。
首先,我们需要配置 TMS320F28335 的音频输入输出接口,使其与外部音频设备相连。
然后,编写音频信号放大的算法,实现音频信号的实时处理。
(3)将编写好的程序下载到 TMS320F28335 处理器中,进行运行测试。
在测试过程中,我们需要对音频输入输出接口进行配置,以满足实际应用需求。
同时,通过观察音频信号处理结果,评估算法的性能。
tms320f28335原理及其在电气工程中的应用
tms320f28335原理及其在电气工程中的应用TMS320F28335是一款基于32位定点数字信号处理器(DSP)的芯片,由德州仪器公司(Texas Instruments)生产。
它具有高速、高效、低功耗等优点,广泛应用于各种电气工程领域。
TMS320F28335基于C28x内核架构,拥有高达150MHz的最高工作频率,可以实现复杂的数字信号处理和控制算法,如矢量控制、PID调节、滤波、FFT等。
此外,它还拥有多种外设接口,如GPIO、CAN、SPI、I2C等,可以实现各种外部设备的连接和数据通信。
在电气工程领域中,TMS320F28335主要应用于电力电子、电机控制、光伏发电、电网无功补偿、智能电网等方面。
具体应用包括:
1. 电机控制:TMS320F28335内置了多种PWM输出模块和编码器接口,可以实现高性能的电机控制,如直接矢量控制、间接矢量控制等。
2. 电力电子:TMS320F28335可以实现各种电力电子开关器件的PWM控制,如IGBT、MOSFET、整流器等,实现电力变换、能量转换和电子调节等功能。
3. 光伏发电:TMS320F28335可以与光伏逆变器的控制器相结合,通过MPPT 算法实现对光伏电池板的最大功率追踪,提高光伏发电效率。
4. 智能电网:TMS320F28335可以与智能电网控制器相结合,实现对电网的无功补偿、电网状态监测、分布式发电控制等功能。
总之,TMS320F28335作为一款高性能的DSP芯片,具有广泛的应用前景,在电气工程领域中将有着越来越广泛的应用。
DSP28335很好的资料

TMS320F28335 TechV_28335目录1DSP的PWM信号 (1)1.1简介 (1)1.2端口对应关系 (2)1.3初始化程序注释 (2)2DSP的CAN通信 (4)2.1CAN2.0B协议简述 (4)2.2CAN总线电平 (5)2.3CAN总线上的120欧电阻 (6)2.4DSP的CAN时钟模块 (6)2.5邮箱初始化例程注解 (7)2.6消息发送和接收 (8)2.7CAN的适配器存在的一些问题 (9)3DSP的32位浮点运算测试 (10)4DSP定时器中断 (11)4.1DSP28335的定时器 (11)4.2定时器分频 (11)4.3计数器计数 (12)4.4定时器时钟周期 (12)5DSP看门狗复位 (12)5.1看门狗时钟 (12)5.2看门狗系统控制和状态寄存器(SCSR) (13)5.3看门狗计数寄存器(WDCNTR) (13)5.4看门狗重启管理器(WDKEY) (14)5.5看门狗控制寄存器(WDCR) (14)6软件报错与处理 (15)6.1CCS Setup中仿真器的配置 (15)6.2Connect报错——1145——换仿真器解决 (17)6.3CAN口测试A发B收,数据发不出去 (19)6.4编译Pwm测试文件出错 (19)6.5could not open source file "DSP2833x_Device.h (20)7备注与注意事项 (22)8附录C源程序 (22)8.1PWM初始化及脉冲产生函数 (22)8.2邮箱初始化函数 (33)8.3浮点运算测试函数 (36)8.4定时器中断初始化函数 (38)8.5采用定时器的延时函数 (39)8.6看门狗初始化函数 (40)1DSP的PWM信号1.1简介DSP28335共12路16位的ePWM,能进行频率和占空比控制。
ePWM的时钟TBCLK=SYSCLKOUT/(HSPCLKDIV×CLKDIV):PWM信号频率由时基周期寄存器TBPDR和时基计数器的计数模式决定。
tms320f28335的gpioa组控制原理
tms320f28335的gpioa组控制原理TMS320F28335的GPIOA组控制简介TMS320F28335是德州仪器(Texas Instruments)推出的一款高性能数字信号处理器(DSP)。
作为一名资深的创作者,学习如何利用TMS320F28335的GPIOA组进行控制是十分重要的。
GPIO(General Purpose Input Output)是通用输入输出口,可以连接外部设备和传感器,用于数据的输入和输出。
本文将深入浅出地介绍TMS320F28335的GPIOA组控制的相关原理,帮助读者了解如何使用这个强大的功能。
GPIOA组GPIOA组是TMS320F28335芯片的一部分,它提供了32个独立的GPIO引脚,可以通过编程将其配置为输入或输出。
这些引脚可以连接到外部设备,例如LED灯、开关、传感器等。
引脚配置在开始控制GPIOA组之前,首先需要将引脚配置为输入或输出模式。
可以通过设置特定的寄存器来实现。
输入模式将引脚配置为输入模式时,可以读取外部设备或传感器的信号。
下面是配置引脚为输入模式的示例代码:= 0; // 设置GPIO0为普通IO口= 0; // 设置GPIO0为输入上述代码将将GPIO0配置为输入模式。
通过修改GPIO0的GPAMUX1和GPADIR寄存器的特定位,可以实现配置其他引脚为输入模式的操作。
输出模式将引脚配置为输出模式时,可以向外部设备发送信号。
下面是配置引脚为输出模式的示例代码:= 0; // 设置GPIO1为普通IO口= 1; // 设置GPIO1为输出上述代码将将GPIO1配置为输出模式。
通过修改GPIO1的GPAMUX1和GPADIR寄存器的特定位,可以实现配置其他引脚为输出模式的操作。
读取输入一旦将引脚配置为输入模式,就可以读取与之连接的外部设备或传感器的信号。
下面是读取输入信号的示例代码:Uint16 input = ; // 读取GPIO0的输入信号上述代码将GPIO0的输入信号读取到变量input中。
采用DSPTMS320F28335的三相SPWM变频电源的设计
采用 DSP TMS320F28335 的三相 SPWM 变频电源的设计作者:佚名 来源:世界电子元器件 发布时间:2009-4-27 12:12:32 [收 藏][评 论]匡] 变频电源作为电源系统的重要组成部分,其性能的优劣直接关系到整个系统的安全和可靠性指标。
现代变频电源以低功耗、高效率、电路简洁等显著优点而备受青睐。
变频电源的整个电路由交流-直流-交流-滤波等部分构成,输岀电压和电流波形均为纯正的正弦波,且频率和幅度在一定范围内可调。
本文实现了基于 TMS320F28335的变频电源数字控制系统的设计,通过有效利用 TMS320F28335丰富 的片上硬件资源,实现了 SPWM 的不规则采样,并采用PID 算法使系统产生高品质的正弦波, 具有运算速 度快、精度高、灵活性好、系统扩展能力强等优点。
系统总体介绍根据结构不同,变频电源可分为直接变频电源与间接变频电源两大类。
本文所研究的变频电源采用间接变频结构即交-直-交变换过程。
首先通过单相全桥整流电路完成交 -直变换,然后在DSP 控制下把直流电 源转换成三相SPWM 波形供给后级滤波电路,形成标准的正弦波。
变频系统控制器采用 TI 公司推出的业 界首款浮点数字信号控制器 TMS320F28335,它具有150MHz 高速处理能力,具备32位浮点处理单元,单 指令周期32位累加运算,可满足应用对于更快代码开发与集成高级控制器的浮点处理器性能的要求。
与上 一代领先的数字信号处理器相比,最新的F2833x 浮点控制器不仅可将性能平均提升 50%,还具有精度更高、 简化软件开发、兼容定点 C28x TM 控制器软件的特点。
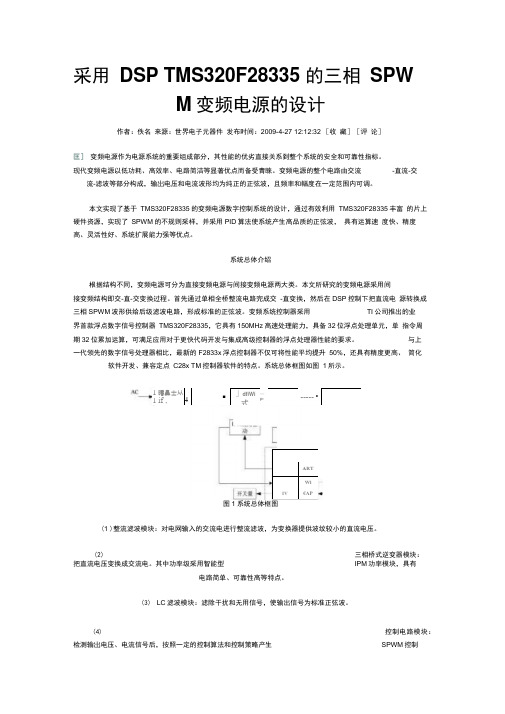
系统总体框图如图 1所示。
图1(1 )整流滤波模块:对电网输入的交流电进行整流滤波,为变换器提供波纹较小的直流电压。
(2)三相桥式逆变器模块:把直流电压变换成交流电。
其中功率级采用智能型IPM 功率模块,具有电路简单、可靠性高等特点。
采用DSP TMS320F28335的三相SPWM变频电源的设计
采用DSP TMS320F28335的三相SPWM变频电源的设计变频电源作为电源系统的重要组成部分,其性能的优劣直接关系到整个系统的安全和可靠性指标。
现代变频电源以低功耗、高效率、电路简洁等显著优点而备受青睐。
变频电源的整个电路由交流-直流-交流-滤波等部分构成,输出电压和电流波形均为纯正的正弦波,且频率和幅度在一定范围内可调。
本文实现了基于TMS320F28335的变频电源数字控制系统的设计,通过有效利用TM S320F28335丰富的片上硬件资源,实现了SPWM的不规则采样,并采用PID算法使系统产生高品质的正弦波,具有运算速度快、精度高、灵活性好、系统扩展能力强等优点。
系统总体介绍根据结构不同,变频电源可分为直接变频电源与间接变频电源两大类。
本文所研究的变频电源采用间接变频结构即交-直-交变换过程。
首先通过单相全桥整流电路完成交-直变换,然后在DSP控制下把直流电源转换成三相SPWM波形供给后级滤波电路,形成标准的正弦波。
变频系统控制器采用TI公司推出的业界首款浮点数字信号控制器TMS320F28335,它具有150MHz高速处理能力,具备32位浮点处理单元,单指令周期32位累加运算,可满足应用对于更快代码开发与集成高级控制器的浮点处理器性能的要求。
与上一代领先的数字信号处理器相比,最新的F2833x浮点控制器不仅可将性能平均提升50%,还具有精度更高、简化软件开发、兼容定点C28x TM控制器软件的特点。
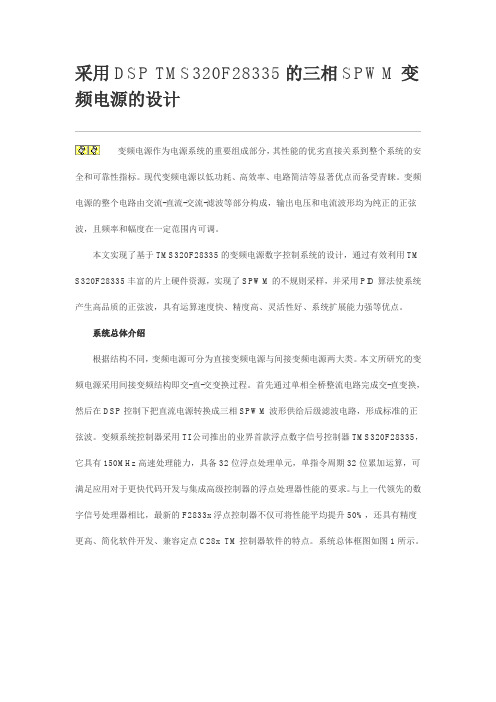
系统总体框图如图1所示。
图1 系统总体框图(1)整流滤波模块:对电网输入的交流电进行整流滤波,为变换器提供波纹较小的直流电压。
(2)三相桥式逆变器模块:把直流电压变换成交流电。
其中功率级采用智能型IPM功率模块,具有电路简单、可靠性高等特点。
(3)LC滤波模块:滤除干扰和无用信号,使输出信号为标准正弦波。
(4)控制电路模块:检测输出电压、电流信号后,按照一定的控制算法和控制策略产生SPWM控制信号,去控制IPM开关管的通断从而保持输出电压稳定,同时通过SPI接口完成对输入电压信号、电流信号的程控调理。
基于TMS320F28335 DSP的三相电动机控制器的设计
中图分类号 :T 5 1 M 7
文献标 识码 :A
文章编 号 :10 — 8 1 (0 2 8—1 1 0 1 3 8 2 1 )1 2 —2
De i n fCo r le o sg o nt o l r f r Thr e Ph s o o i e a e M t r Usng TM S 2 3 0F2 3 5 8 3
t e sa l nd rbu t o b tb e a o s .
Ke wo d :T r e p a e mo o ;T 3 0 2 3 5 DS y r s h e h s tr Ms 2 F 8 3 P;Moo o t l r t rc n r l oe
交流 电机控制一直是工业控制 领域的热点 ,各种 算法层 出不穷 ,然而 ,由于复杂 的运算对处理器 的要 求相 当高 ,许多算法 只局 限于理论 阶段 。采用 T 公 I 司生产 的高速度浮点型 D P控制 芯片 T 3 0 2 35 S MS2 F 8 3 作为主控制器 ,结合 电压 电流采样 电路 、保护 电路 、 输 出驱动 电路 、速度反馈电路等硬件组成 了可以控制 三相交流 电机 的控制 系统 。T S 2 F 83 M 30 2 35的运算 速 度快 ,具有高速浮点运算单元 ,在其上可 实现复杂 的 无速度估计控制和 电机故障诊断等算法。
TMS320F28335 DSP在控制双轴转台方面的应用
TMS320F28335 DSP在控制双轴转台方面的应用【摘要】双轴转台通过方位轴和俯仰轴的合成运动,实现二维控制;本论文中,转轴的动力设备采用力矩容量大,响应快的直流力矩电动机;应用角位变送器,进行实际位置的测量,在闭环的控制下,满足精度要求;TMS320F28335 DSP 作为控制芯片对转台的运动进行控制,应用到了TMS320F28335 DSP中的SCI 和PWM模块。
【关键词】转台;方位轴;俯仰轴;DSP;SCI;PWM1.系统介绍整个控制系统以TMS320F28335DSP为CPU,它作为主控芯片。
上位机与DSP通过RS422进行通讯,上位机将转台的目标位置指令发送给DSP。
角位变送器通过RS232将转台当前的实际位置反馈给DSP。
DSP将接收到的目标位置指令与反馈回来的实际位置进行PID运算,将解算出的数据赋给PWM模块,最终通过调节PWM的占空比控制电机的运动。
2.硬件总体硬件控制系统包括dsp主控板控制部分和电机驱动板控制部分。
主控板电气控制部分包括供电电路、程序仿真口、488电路组成的422通信、232通信电路、I/O口电路,电机驱动板控制部分包括电源供电电路、方位MSK4201驱动模块电路、俯仰MSK4201驱动模块电路。
上位机通过422通信给DSP发送预定位置指令,通过DSP中PWM调节来控制俯仰、方位电机的运动状态,另外通过232通信检测转台的实际运动位置送给DSP,通过PID调节使转台到达预定位置,从而完成整体控制。
(1)电源模块MSK4201驱动模块DC12V供电电路;角位变送器DC24V供电电路;主控板DC5V供电电路;片内CPU DC1.8V供电电路;片内flash、片内I/O、仿真下载口,DC3.3V供电电路;(2)14针仿真下载口(3)RS-422通讯串口RS-422是EIA推荐的“平衡式电压数字接口电路的电气特性标准”。
此标准是为改善RS-232C标准的电气特性和与RS-232C兼容而制定的。
DSP实验二、TMS320F28335按键输入控制LED亮灭

继续我的第二个实验;实现按键控制LED亮灭:功能描述:上电默认 LD3 亮;触动一次按键 SW12,LD3 灭再按一次按键 SW12, LD3亮再触动一次按键SW12,LD3 灭再按一次按键 SW12, LD3亮。
实现每触动一次按键, LED执行一次由亮到灭,或者由灭到亮,也就是实现一次状态反转。
电路连接说明:LD3 设置为通用 GPIO 上拉输出初始化后默认为输出 LD3 亮状态; LD3 控制LED灯的负极,如下图;SW12 设置为通用 GPIO 上拉输入该引脚应用滤波功能,且仅在按键抬起时控制 LD3状态发生变化。
按键电路如上图, GPIO53须输出 0,当按键按下时,读取 GPIO50端口值,为 0,当按键未按下时, GPIO50因为上上拉作用,其端口值为 1。
程序设计说明:按键的读取采用实时扫描的方式(非中断方式),功能要求在按键抬起后发生 LED状态翻转;所以要记录上一次按键值,并且将当前值==0&&上一次值==1 时,做为按键抬起有效,控制LED发生状态翻转。
主要程序如下:while(1){EALLOW;last_Key_SW12 = new_Key_SW12;// 保存旧值new_Key_SW12 = Key_SW12();// 读取新值if ( last_Key_SW12==0 && new_Key_SW12==1)LD3_TOGGLE();EDIS;}经实际测试,上述程序可以实现 LD3的翻转,基本达到设计要求。
但是在测试过程中,时好时坏,有时能够看见 LED快速翻转,说明按键有抖动的情况,这里可以考虑 IO 口滤波,即在初始化时,设置 IO 采样周期以及量化串口,设置如下:采样周期设置为 200 时,不再出现抖动现象,按键稳定操作。
源程序如下:#include"DSP2833x_Device.h"// DSP2833x Headerfile Include File#include"DSP2833x_Examples.h"// DSP2833x Examples Include File#define LD3_ON()GpioDataRegs.GPACLEAR.bit.GPIO0= 1#define LD3_OFF()GpioDataRegs.GPASET.bit.GPIO0= 1#define LD3_TOGGLE()GpioDataRegs.GPATOGGLE.bit.GPIO0= 1#define LD4_ON()GpioDataRegs.GPBCLEAR.bit.GPIO34= 1#define LD4_OFF()GpioDataRegs.GPBSET.bit.GPIO34= 1#define Key_SW12()GpioDataRegs.GPBDAT.bit.GPIO50/**main.c*/int main ( void ) {unsigned char last_Key_SW12=1; // 保留上一次扫描结果,上电默认为未按下状态unsigned char new_Key_SW12=1; // 保留当前扫描结果,上电默认为未按下状态InitSysCtrl();DINT;IER = 0x0000;IFR = 0x0000;InitPieCtrl();InitPieVectTable();InitGpio();EALLOW;//GPIO0 LD3控制 LED负极GpioCtrlRegs.GPAMUX1. bit. GPIO0= 0;//0 gpio modeGpioCtrlRegs.GPADIR. bit. GPIO0= 1;//1 output0 input GpioCtrlRegs.GPAPUD. bit. GPIO0= 0;//1 enable pullup 0 disable pullup//GPIO34 LD4控制 LED负极GpioCtrlRegs.GPBMUX1. bit. GPIO34 = 0;//0 gpio modeGpioCtrlRegs.GPBDIR. bit. GPIO34= 1;//1 output0 input GpioCtrlRegs.GPBPUD. bit. GPIO34= 0;//1 enable pullup 0 disable pullup//GPIO50按键矩阵 SW12输入端GpioCtrlRegs.GPBMUX2. bit. GPIO50= 0;//0 gpio modeGpioCtrlRegs.GPBDIR. bit.GPIO50= 0;//1 output0 input GpioCtrlRegs.GPBPUD. bit.GPIO50= 0;//1 enable pullup 0 disable pullup GpioCtrlRegs.GPBCTRL. bit. QUALPRD2= 200;// 采样周期 =2*Tsysclkout*200 GpioCtrlRegs.GPBQSEL2. bit. GPIO50 = 2;//采样窗内 3次采样结构相同//GPIO53按键矩阵负极输出0GpioCtrlRegs.GPBMUX2. bit. GPIO53= 0;//0 gpio modeGpioCtrlRegs.GPBDIR. bit.GPIO53= 1;//1 output0 input GpioCtrlRegs.GPBPUD. bit.GPIO53= 0;//1 enable pullup 0 disable pullup GpioDataRegs.GPBCLEAR. bit. GPIO53 = 1;LD3_ON(); // 默认输出亮状态LD4_OFF();EDIS;while(1){EALLOW;last_Key_SW12 = new_Key_SW12;// 保存旧值new_Key_SW12 = Key_SW12();// 读取新值if ( last_Key_SW12==0 && new_Key_SW12==1)LD3_TOGGLE();EDIS;}}。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三大电机控制方案之DSP篇(1):TMS320F28335
欲了解更多关于电机控制的解决方案,可点击电机控制方案的MCU
篇与FPGA篇进行查阅:
三大电机控制方案之MCU篇
三大电机控制方案之FPGA篇
近几年来,基于DSP的电机专用集成电路由于在计算速度、容量存
储等方面比单片机具有更优的性能,已逐渐代替单片机运用于电机控制系统中。
目前的大部分电机都把电流环控制作为DSP的一个协处理来考虑,而速
度或位置环控制则由DSP芯片来实现。
一般情况下,由于位置控制比较灵活,且差异性比较大,很难做到通用性,所以位置环一般由DSP来直接完成;但
速度和电流环相对具有通用性,且互相关联紧密,以致高性能的速度控制都
离不开电流控制,因此完全可以把它们集成到一个芯片中处理,这样既可以
实现速度伺服控制,又可以单独进行电流控制,还可以和DSP共同构成位置。