智能化腕力传感器的设计
智能手环计步准确性检测装置设计思路
智能手环计步准确性检测装置设计思路赵㊀轶ꎬ李培培ꎬ刘㊀勇ꎬ胡国辉重庆市计量质量检测研究院ꎬ重庆401123摘要:智能手环普遍采用三轴加速传感器采集用户的运动信号ꎬ通过试验比较不同品牌的智能手环计步准确性普遍存在较大的误差ꎬ给消费者使用造成一定的困扰ꎮ目前ꎬ智能手环产品缺乏统一的国家及行业标准ꎬ计步性能更是缺少检测方法及相应检测装置ꎮ针对消费者热切关注的计步准确性指标研究并设计一种人体行走姿态模拟器ꎬ对不同行走姿态进行准确检测ꎬ为广大消费者和生产企业提供准确㊁公正性的检测数据参考ꎬ有利于促进智能手环行业持续健康发展ꎮ关键词:智能手环ꎻ计步准确性ꎻ行走姿态模拟ꎻ检测装置中图分类号:TP230引言近年来ꎬ智能手环成为时尚热门消费产品ꎬ它能够实时记录用户日常生活中的运动状态㊁睡眠以及部分生理指标ꎬ并将相关数据与手机㊁IPAD等进行同步ꎬ以便为用户对自身的生活方式及身体状态进行参考ꎮ智能手环集成了传统硬件技术㊁新型人机交互技术以及云应用服务与大数据等多种关键技术㊁传统硬件技术ꎬ主要包括嵌入式操作系统㊁无线自组网络㊁移动数据库㊁无线连接以及高效电池技术等ꎮ目前ꎬ市场上的智能手环均具有计步功能ꎬ通过试验比较不同品牌的智能手环ꎬ部分产品计步误差达到30%以上ꎬ甚至写字㊁甩手㊁敲键盘㊁弹琴等动作ꎬ都被手环误当做走路来计算步数ꎬ普遍存在较大计步误差ꎬ给消费者造成了极大的困扰ꎮ通过研究制定统一㊁可操作的智能手环产品检测标准ꎬ才能为智能手环相关厂商提供一个明确有效的质量判定依据ꎬ有利于维护消费者的切身利益及市场经济秩序ꎮ1国内外研究情况计步性能是智能手环的基本功能ꎬ其准确性由于缺乏相关的试验方法及检测装置ꎬ导致不同的检测机构只能提供相关参考数据ꎮ目前市场上的智能手环计步功能无非有两种ꎮ一种为三维律动的运动状态感应器(三轴加速度传感器)ꎬ另外一种为绿光光电测量法(光电作用)ꎬ但由于心率光电透射测量需要在手环背面加入一个芯片ꎬ通过手触来监测ꎬ这种比较简单易用ꎬ免去了心率带佩戴的麻烦ꎬ但是缺点就是不如心率带那么准确ꎮ三轴加速度传感器根据实时捕捉到的三个维度的各项数据ꎬ经过滤波㊁波峰㊁波谷检测等过程ꎬ使用各种算法和缜密的逻辑运算ꎬ最终将这些数据转变成手环APP端的可读数据ꎬ步数㊁距离㊁消耗的卡路里数值等呈现在用户面前ꎮ与绿光光电测量法不同的是三维律动的运动状态感应器它能够检测到你手臂的摆动ꎬ并且计算用户每天运动量ꎬ但缺点就是每个厂商的计算方式不一样也导致同样的硬件得出的数据也不一样ꎮ绿光光电测量法是由两个绿色波长的发光LED和一个光敏传感器组成ꎬ位于心率表的背部ꎬ其原理是基于手臂血管中的血液在脉动的时候会发生密度改变而引起透光率的变化ꎬ通过光敏传感器接收手臂皮肤的反射光和感测光场强度的变化换算成心率ꎬ并持续测量实时心率ꎬ计算平均心率ꎬ记录最大心率ꎮ现阶段ꎬ针对智能手环的计步性能检测ꎬ各家检测技术机构或协会组织采样的检测数据只能通过人员个体进行实际行走比较ꎬ或者通过制作机械手臂进行简单模拟ꎮ由于不同个体体现出来的行走姿势存在较大差异ꎬ通过简单的试验方法及检测装置并不能准确反映出智能手环计步性能ꎮ目前ꎬ深圳市市场监督管理局已于2017年10月发布实施了深圳市地方标准SZDB/Z272 2017«可穿戴智能手环通用技术要求»ꎬ该地方标准规定了可06㊀㊀㊀㊀㊀㊀㊀㊀应用电子技术㊀㊀2019年第11期㊀㊀2019年第11期㊀㊀穿戴智能手环的功能㊁外观和结构㊁中文信息处理㊁预装软件㊁数据接口㊁按键㊁显示部件㊁传感器㊁电源适应能力㊁电池㊁电源适配器及充电数据接口㊁手环带㊁文档格式㊁节能㊁安全㊁环境适应性㊁电池兼容性㊁可靠性及寿命㊁有害物质限量㊁个人信息保护等技术要求ꎬ但未对计步性能等指标提出技术要求及检测方法ꎮ部分厂商也根据自身产品特点制定了企业标准ꎬ主要对外观㊁电源㊁指示灯㊁气候环境适应性㊁机械环境适应性㊁电磁兼容性㊁电池安全性㊁有毒有害物质㊁蓝牙㊁接口㊁应用软件功能等方面进行了规定ꎮ在欧盟㊁美国和日本等地区ꎬ智能手环产品需要做一些相应的认证测试ꎬ例如ROHS检测㊁无线产品认证测试㊁EMC电磁兼容检测等ꎬ但都未涉及智能手环功能㊁性能等方面的测试ꎮ因此ꎬ智能手环计步性能准确性检测在国际国内还处于空白状态ꎮ2检测装置设计的提出目前ꎬ市场上智能手环普遍内置三轴加速传感器采集用户的运动信号ꎬ然后利用软件算法对信号进行分析计算ꎬ最后得出行走步数数据ꎮ由于肢体动作的复杂性和不稳定性ꎬ因此ꎬ在单一方向上模拟行走姿态不能充分代表实际行走各种状态ꎬ例如慢走㊁快走㊁跑步㊁爬坡㊁走楼梯等ꎮ部分技术机构及协会组织通过自定义的方法对人体模拟室外标准步伐㊁混合步伐以及室内步伐进行横向比较测试ꎬ得到不同品牌智能手环的计步准确性相对误差数据ꎬ但由于人体的个体差异在模拟各种步伐状态之间还是存在较明显的差异ꎬ并且不能代表人体在随机状态下的运行姿态ꎮ[1]针对智能手环内置三轴加速传感器的测量原理ꎬ需设计一种能够模拟3个轴向的运动状态ꎬ且3个轴向运动独立互不干涉的模拟检测装置ꎮ在设计过程中ꎬ重点对该检测装置中直线驱动电机和音圈电机在不同运动姿态模拟中的测量准确性与可行性进行研究ꎬ并分析评估人体不同运动状态下ꎬ手腕处运动状态与加速度基本规律ꎬ根据手腕处运动加速度与运动状态的相关性实验进行设计ꎬ最后对检测装置进行相关仿真验证ꎮ3检测装置结构及组成通过试验分析比较发现ꎬ人体在行走过程中ꎬ手腕处的运动方向位移及加速度涉及三个方向ꎬ包括前向㊁横向和纵向ꎬ并且不同的运动状态所产生的三个方向的位移和加速度存在较大差异ꎮ因此ꎬ要准确检测智能手环计步准确性需要研制相应的人体手腕运动模拟装置ꎮ本项目设计提出的智能手环计步性能检测装置主要由3轴运动平台㊁3轴运动平台驱动器㊁控制器(控制电脑)㊁辅助连接检测设备㊁加速度波形文件等部分组成ꎮ其中ꎬ3个轴向运动行程需满足行走或跑步状态下的手腕运动轨迹ꎬ当人体处于行走㊁跑步等运动状态时ꎬ手腕处频率范围为0~20Hzꎬ因此ꎬ单个轴运动速度尽量接近此速度ꎮ通过分解人体运动姿态ꎬ手腕处3轴轨迹中X轴行程约60cmꎬY轴行程约40cmꎬZ轴行程约30cmꎮ[3]检测装置硬件结构框图如下:图1㊀装置硬件结构框图其中ꎬ3轴运动平台选用加速性能好的直线电机ꎬ直线电机与普通步进伺服电机相比ꎬ具有定位精度高㊁反应速度快㊁结构简单㊁低损耗高寿命㊁散热性好的优点ꎬ驱动器选用多轴运动驱动器ꎬ并带有CANopen网络接口ꎮ控制器(控制电脑)选用x86体系计算机ꎬ操作系统使用主流Windows10系列ꎬ使用VS开发环境㊁NET技术架构ꎮ由于绝大部分智能手环都具有Android系统下的APPꎬ因此ꎬ辅助连接检测设备选择Android手机作辅助连接设备ꎬGoogle可提供Android系统下DDMS(theDalvikDebugMonitor)服务ꎬ作用SDK调试工具的一部分ꎬ此服务可以捕捉Android屏显ꎮ[2]检测装置软件部分主要由人机接口㊁驱动模块㊁通信协议栈㊁波形文件以及核心算法等组成ꎬ其结构体系框图如下:图2㊀软件结构体系框图16应用电子技术㊀㊀㊀㊀㊀㊀㊀㊀其中ꎬ波形文件包含文件头(ID)㊁文件描述㊁文件组织㊁时间戳㊁3轴加速度位移读取等ꎮ核算法包括基本位置算法和预计算算法ꎬ基本位置算法包括读取加速度文件ꎬ校验㊁确认数据正确性ꎬ确认加速度数据起点ꎬ读取描述长度ꎬ采样率ꎬ确认加速度包长度ꎬ确认X㊁Y㊁Z三轴累积位移(初始置零)ꎬ根据位移计算公式ꎬ求解下一时刻X㊁Y㊁Z的位置ꎬ比较X㊁Y㊁Z位置是否超过行程ꎬ发出警报或发出下一时刻的位置信息到驱动等功能ꎮ预计算算法包括读取加速度文件ꎬ校验ꎬ确认数据正确ꎬ确认加速度数据起点ꎬ读取描述长度ꎬ采样率ꎬ确认加速度包长度ꎬ确认X㊁Y㊁Z三轴累积逻辑位移(初始置零)ꎬ根据位移计算公式ꎬ得出不同时刻X㊁Y㊁Z的逻辑位置ꎬ检查X㊁Y㊁Z逻辑位置ꎬ判断是否超过三轴实际行程ꎬ发出告警或调整逻辑原点ꎬ使逻辑行程不超出实际允许的位移ꎮ4结束语本项目针对智能手环的计步性能准确性检测开展研究ꎬ通过分析人体不同运动姿态下的特性ꎬ设计并提出3个轴向运动模拟检测装置ꎬ较好地解决了智能手环在人体不同运动状态下计步性能准确性的检测与评估ꎬ对智能手环产品的计步性能检测及技术研究具有良好的指导意义ꎮ参考文献[1][2][3]SZDB/Z272 ̄2017可穿戴智能手环通用技术要求[S].孙晶晶ꎬ田波ꎬ何曙.智能手环横向测评实验研究[J].日用电器ꎬ2018ꎬ151(07):15 ̄18.何晓龙ꎬ史文越ꎬ盛张群ꎬ等.智能手环/手机应用程序在不同步行速度或路面中的计步有效性研究[J].中国体育科技ꎬ2016ꎬ52(6):122 ̄127.26应用电子技术㊀㊀2019年第11期㊀。
智能化腕力传感器的设计
οφ τηε ωριστ φορχε τρανσδυχερ
2 1 常用腕力传感器的机械结构
腕力传感器需测定三维空间的力与力矩信号
目前已经有多种结构形式≈ 一般采用斯坦福大学人
工智能研究所的轮辐式十字梁结构≈ 在弹性体的十
字主梁与轮缘联结处采用浮动梁柔性环节 形成间
力 φ ξ !φ ψ 或 ζ 方向所受力矩 μ ζ 引起主梁侧面弯曲变
形 如 φξ 引起主梁的侧面 ! 弯曲 φψ 引起主梁的
侧面 弯曲 μ ζ 引起主梁侧面
均弯曲
Ξ 收稿日期
机器人
年月
φ ζ!μ ξ 或 μ ψ 引起主梁正面弯曲变形 如 φ ζ 引起主梁 正面 ! ! ! 均弯曲 μ ξ 引起主梁正面 ! 弯曲 μ ψ 引起主梁正面 ! 弯曲变形 因此 只要在主梁的前 后安装测力元件 就可以测量 φ ζ!φ ξ !φ ψ 的值
第 卷第 期 年月
机器人 ΡΟΒΟΤ
∂
文章编号
2
22
智能化腕力传感器的设计Ξ
唐慧强 黄惟一
东南大学仪器科学与工程系 南京
摘 要 本文分析了十字梁结构六维腕力传感器的工作原理与存在问题 提出了简化应变电阻贴片!机械结
构!电路与数据处理的智能化设计方案 本文提出的三主梁结构传感器中 用六个应变电阻来测量六维力 因此 简
φξ φ Ρ Ρ Ρ
φψ φ Ρ Ρ
φζ φ Ρ Ρ Ρ
μξ φ Ρ Ρ Ρ
μψ φ Ρ Ρ
μζ φ Ρ Ρ Ρ
通过以上受力分析可知 不同方向受力时各电 阻的变化是不同的 因此 可以通过六个应变电阻的 测量来求取力矢量 3 3 腕力传感器的标定
新型六维腕力传感器
1 东南大学 仪器科学与工程学院, 南京,106 209
曲未 僵垂
学 学 自 科学 2 1 () 04 报: 然 版,1,5:20 0 3 4 -7
Ju a f nigU i rt fno m tnS ineadT cn l y: trl cec dt n,0 13 5 :0 -0 o rl o j nv syo fr ai c c n ehoo Naua ineE io 2 1 ,( )4 24 7 n Na n ei I o e g S i
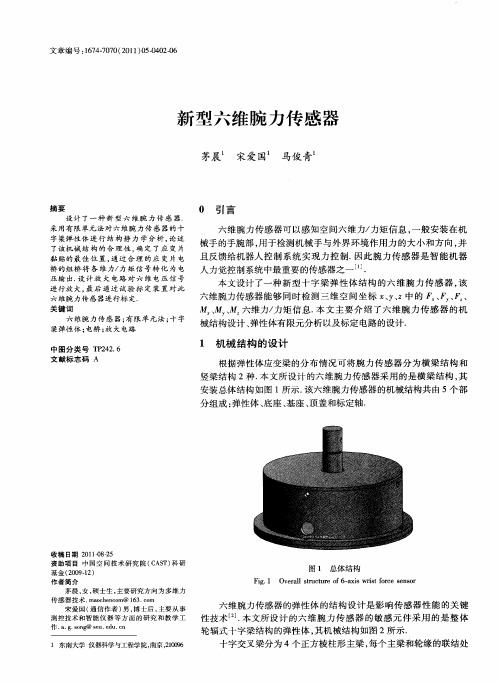
六维 腕力 传感 器 的 弹性 体 的结 构 设 计 是 影 响传 感 器 性 能 的关 键 性技术 . 本文 所设 计 的六 维腕 力 传 感 器 的 敏 感 元 件 采 用 的是 整 体 轮辐 式 十字梁 结 构 的弹性 体 , 其机 械结 构 如图 2所示 . 十字 交叉 梁分 为 4个 正方 棱柱 形 主梁 , 每个 主 梁和 轮缘 的联 结处
体 中心孔 过盈 配合 的标定 轴传 递 给 弹性 梁 , 现力/ 实 力 矩 信息 的测 量.
2 有 限元 分 析
因为多维 腕 力传 感 器 中弹性 体 的结构 设 计 和应 变片 贴 片是关 系 到 整 个 传 感 器 性 能 的关 键 技 术 , 因 此要 对 弹性体 进 行 力 学 分 析 , 定 其 结 构 尺 寸 以及 确
收 稿 日期 2 1 -82 0 10 -5
资助项 目 中国空 间技术研 究 院( A T 科研 C S)
基 金 (0 9 1 ) 2 0 —2 作者 简 介 茅 晨 , , 士 生 , 要研 究 方 向 为 多 维 力 女 硕 主
图 1 总体 结 构
Fi 1 Ov r l sr c u e o a i itfr e s ns r g. e al tu t r f6- xs wrs o c e o
面向机器人腕部力觉感知的多维力力矩测量方法
目前,机器人力觉感知技术主要集中在末端 执行器上,而腕部力觉感知的研究相对较少 。腕部力觉感知在机器人操作中具有重要作 用,例如在装配、打磨、拧紧螺丝等任务中 ,需要实时感知腕部受力情况并进行精确控 制。因此,研究面向机器人腕部力觉感知的
多维力/力矩测量方法具有重要的实际应用 价值。
国内外研究现状
面向机器人腕部力觉感知的 多维力力矩测量方法
汇报人: 2023-12-28
目录
• 引言 • 机器人腕部力觉感知系统概述 • 多维力/力矩测量方法 • 实验与分析 • 结论与展望
01
引言
研究背景与意义
随着机器人技术的不断发展,机器人已广泛 应用于工业、医疗、服务等领域。在人机交 互、装配、搬运等任务中,机器人的力觉感 知能力对于提高作业精度、安全性和自主性 具有重要意义。
储。
数据处理软件
对采集到的数据进行处理、分 析和优化,提取有用的信息。
校准软件
对测量系统进行校准,确保测 量结果的准确性和可靠性。
用户界面软件
提供友好的用户界面,方便用 户进行操作和控制。
04
实验与分析
实验设置
实验设备
采用高精度的六维力传感 器,模拟机器人腕部力觉 感知。
实验环境
在封闭的实验室环境中进 行,以减少外界干扰。
未来研究可以探索将该测量方法应用于其他类型 的机器人和自动化设备中,以拓展其应用范围和 领域。
THANKS
谢谢您的观看
机器人腕部力觉感知系统的组成
传感器
传感器是力觉感知系统的核心部 件,能够将外部作用力转化为电
信号,传输给控制系统。
信号处理电路
信号处理电路负责将传感器输出的 电信号进行放大、滤波和转换等处 理,以便于控制系统进行后续处理 。
智能压力传感器的设计
智能压力传感器的设计智能压力传感器是一种能够测量物体施加的压力大小的装置。
它通过使用先进的传感技术,将物体压力转化为电信号,并将其传输给外部设备进行处理和分析。
智能压力传感器在许多领域应用广泛,如工业自动化、机械工程和医疗设备等。
本文将详细探讨智能压力传感器的设计原理、工作原理和应用。
首先,我们来讨论智能压力传感器的设计原理。
智能压力传感器主要由三个部分组成:传感器元件、信号处理电路和输出接口。
传感器元件是关键组成部分,它能够感知物体施加的压力并将其转化为电信号。
常用的传感器元件有压阻式传感器、压电式传感器和电容式传感器等。
压阻式传感器是一种利用电阻值随压力变化的原理来测量压力的传感器。
当物体施加压力时,传感器元件内部的导体会发生形变,从而改变电阻值。
信号处理电路会测量电阻值的变化,并将其转化为电压信号输出给外部设备。
压电式传感器则是利用压电效应来测量压力的传感器。
压电材料在受到压力后会产生电荷,通过读取电荷的大小来确定压力大小。
信号处理电路会将电荷转化为电压信号,并输出给外部设备进行处理。
电容式传感器是利用物体施加压力后感应电容值的变化来测量压力的传感器。
当物体施加压力时,传感器元件之间的电容值会发生变化。
信号处理电路会将电容值变化转化为电压信号,并输出给外部设备进行处理。
其次,我们来探讨智能压力传感器的工作原理。
智能压力传感器通过感知物体施加的压力来确定压力大小。
当物体压力施加到传感器元件上时,元件会发生形变或产生电荷,从而导致电信号的变化。
接着,信号处理电路会将电信号进行放大、滤波和转换等处理,以提高信噪比和准确度。
最后,通过输出接口将处理后的电压信号传输给外部设备进行处理和分析。
最后,我们来探讨智能压力传感器的应用。
智能压力传感器在很多领域都有广泛的应用。
在工业自动化领域,它可以用于监测和控制生产设备的压力,以确保设备的正常运行和安全性。
在机械工程领域,它可以用于测量机械装置的压力,以评估其性能和健康状况。
腕式智能数据采集器硬件设计及应用

腕式智能数据采集器硬件设计及应用随着物联网技术和人工智能的发展,越来越多的智能设备进入我们的生活中,实时采集并处理大量的数据。
腕式智能数据采集器就是这样一种设备,它可以实时检测人的生理信号、环境参数等,并将这些数据上传至云端。
本文将介绍腕式智能数据采集器的硬件设计和应用。
一、硬件设计1. 电路设计腕式智能数据采集器主要由传感器、微控制器、蓝牙模块等组成。
传感器可以采集人的生物参数,如心率、血氧、体温等,也可以采集环境参数,如温度、湿度、气压等。
微控制器负责数据的采集、处理和存储,并通过蓝牙模块将数据上传至云端。
2. 硬件选型在选择硬件时,需要考虑功耗、成本、性能等因素。
对于传感器的选择,可以采用 MEMS 传感器,这种传感器具有体积小、功耗低、精度高等优点。
对于微控制器的选择,可以选择 ARM Cortex-M0+ 核心的微控制器,它具有高性能、低功耗、低成本等优点。
蓝牙模块采用低功耗蓝牙模块,可以实现长时间的运行。
二、应用1. 医疗健康领域腕式智能数据采集器可以应用于医疗健康领域,如心电监测、睡眠监测、运动监测等。
通过腕式智能数据采集器可以实时监测人的生理信号,如心率、血氧等,还可以监测人的睡眠质量、运动量等。
将这些数据上传至云端后,医生可以通过数据分析得到患者的健康状况,进而给出相应的治疗建议。
2. 工业控制领域腕式智能数据采集器还可以应用于工业控制领域,如油田监测、工业自动化等。
通过腕式智能数据采集器可以监测环境参数,如温度、湿度、气压等,还可以监测机器的运行情况。
将这些数据上传至云端后,工程师可以通过数据分析得到机器的运行状态,进而做出相应的控制。
3. 运动健身领域腕式智能数据采集器还可以应用于运动健身领域,如健身监测、运动训练等。
通过腕式智能数据采集器可以实时监测人的运动量、心率等指标,还可以监测运动时的环境参数。
将这些数据上传至云端后,运动员可以通过数据分析得到训练的效果,进而调整训练计划。
机械手腕部设计范文
机械手腕部设计范文机械手是一种模仿人手的机械装置,广泛应用于工业生产线上的自动化操作。
机械手通常由机械臂和手腕部组成,其中手腕部起着连接机械臂与末端执行器的作用。
手腕部的设计对机械手的动作能力和精度有着重要影响。
机械手腕部主要由关节、传感器和执行器组成。
关节是连接机械臂和手腕的部分,通常由旋转关节和弯曲关节组成。
旋转关节使机械手能够在水平方向上旋转,而弯曲关节则使机械手能够在垂直方向上弯曲。
关节的设计需要考虑到承载能力、阻尼控制和位置精度等因素。
传感器在机械手腕部起到了非常重要的作用。
通过传感器可以实时获取机械手的位置、姿态和力量等信息,从而实现更加精确的控制。
常用的传感器有位置传感器、力矩传感器和视觉传感器。
位置传感器用于测量关节的位置,力矩传感器用于测量关节所施加的力矩,而视觉传感器可以通过图像识别实现对目标物体的抓取。
执行器是机械手腕部的输出部分,通过执行器可以实现对机械手的运动控制。
常见的执行器有电机和液压缸。
电机驱动机械手的旋转和弯曲动作,而液压缸则可以实现更大的力矩输出。
根据实际需要,执行器的选型需要考虑到输出力矩、响应速度和能耗等因素。
除了上述基本组成部分,机械手腕部还需要考虑到人机交互性和安全性等因素。
人机交互性指的是机械手腕部与操作人员之间的交互,包括界面设计和操作逻辑等方面。
安全性是指机械手腕部在工作过程中的安全保护措施,如急停装置和限位开关等。
在设计机械手腕部时,需要充分考虑到工作环境和任务需求。
工作环境包括空间限制、温度要求和清洁程度等方面,而任务需求则包括工作范围、负载能力和定位精度等方面。
根据这些要求,可以选择合适的关节结构、传感器和执行器等。
总结起来,机械手腕部设计需要考虑到关节、传感器和执行器等部分的协调配合,同时还需要兼顾人机交互性和安全性等因素。
通过合理的设计,可以实现机械手腕部对于工业生产的快速、准确和安全的操作。
基于Wifi的智能腕式血压计的设计

机电信息工程基丁 Wifi 的智能腕式血压计的设计刘(湖南信息电子信息 ,湖南长沙410151)摘要" 平的提高,高血压人群也在随之增加,如何快速、方便、准确地测量血压,也成 为了大众的关注点。
基于此,通过了解现有的血压计,设计了一款基于WiFi 和蓝牙的智能腕式血压计, 该血压计基于以STC15W4K32S4单片机核心的便携腕式血压计,能准确地测量血压,还能传送数据到手 机端,实时分析,并对存储的历史数据进行大数据分 析,判断用户的血压变化情况。
设计的血压计方便、 准确,满足了用户的使用需求。
关键词:WiFi ;单片机;血压计2 硬件设计2.1主控制器设计主控制器选用STC15W4K32S4单片机,电源电,可直接与PC 机USB 接口 信,无须转换芯片;具 的 存 、数据存[以及EEPROM ,集成有A/D 、PCA 、比较器、专用PWM模块、SPI能接口部件,简化机应用系统的外围电路,使 机应用系统的设计更加简捷,系统能更加 、可靠其工作的最小系统电路图如图2所示。
1 系统总体设计该电 计主要由控制器、传感器、按键输入、出、声光报警、语音 、通信 成。
其中控核心,一对采集到的 信号通过Wifi 或数据的 ,另一方面对采集到的 信 和通过语音报,另与自的较,若超过了报警。
其系统总体框图如图1所示'图1系统总体框图wifi显示主控制器STC15W4K60S4按键蓝牙报警基金项目:湖南信息学院2018年度大学生研究性学习和创新性实验计划项目《基于Wifi 的智能腕式血压计的研究与开发》;2017年湖南省普通高等学校教学改革研究项目《以创新应用能力培养为核心的物联网项目驱动教学改革研究+研究成果;2019年湖南省教育厅科研一般项目《基于WLAN和RFID 的室內人员定位技术研究》。
作者简介:刘雅(1996-),研究方向:电子信息技术、物联网。
1 2 3-4_5_6_7_8_9 w3 322+5v T_tcT 10丄-一G NDMCUP0.0/AD0/RXD3P0.1/AD1/TXD3P0.2/AD2/RXD4P0.3/AD3/TXD4P0.4/AD4/T4CLKO P0.5/AD5/T4P0.6/AD6/T3CLKO P0.7/AD7/T3 P1.0/ADC0/CCP1/RXD2 P1.1/ADC1/CCP0/TXD2P 1.2/ADC2/SS/ECI/CMPO P1.3/ADC3/MOSI P1.4/ADC4/MISO P1.5/ADC5/SCLK P1.6/ADC6/RXD 3/XTAL2/MCLKO 2 P 1.7/ADC7/TXD _3/XTAL 1P5.4/RST/MCLKO/SS_3/CMP- vcc -P5.5/CMP+GND P4.5/ALE/CCP5P2.7/A15/CCP2_3P2.6/A14/CCP1_3P2.5/A13/CCP0~3P2.4/A12/ECI_3/sf,2P2.3/A11/MOSIJ P2.2/A10/MISO_2P2.1/A9/SCLK 2 巴,0/A8/RST 理 T _L(jW P4.<m)/CCP4P4.2/WR/CCP3P4.1/MISO_3P3.7/INT3/TXD_2/CCP2/CCP2_2Pf6/INT2/RXD_2/CCPl_P3.5/T1/TOCLKO/CCPO 1P3.4/TO/T1CLKO/ECI12P3.3/INTr P3.2/INT0P3.1/TXD/T2P3.0/RXDaNT4/T2CLKOK]32 FT "30 PE -29 REC 28里 处223 SW1"22 TXD >S4图2最小系统电路图2. 2语音设计语音选用XY-V17B , —款智能语音模块,支持MP3.WAV 解码格式,最大支持32GTF 卡存储,可通过USB 数据接电脑更新TF 卡存储音频文件。
腕式可穿戴设备中的传感器设计原理
腕式可穿戴设备中的传感器设计原理现代科技的发展,带来了许多智能设备,用于助人们更好地生活。
在智能设备中,可穿戴设备在过去几年中越来越受人们的青睐。
作为可穿戴设备的代表,腕式设备被广泛使用,其中包含的传感器是其核心部分。
那么在腕式可穿戴设备中,传感器的设计原理是什么呢?一、传感器的概念和种类在探讨腕式可穿戴设备中传感器设计原理之前,首先我们需要了解传感器的概念和种类。
传感器,是将一种物理量(光、电、热、声等)转换为另一种易于传输、处理或记录的信号的设备。
目前市场上的传感器种类众多,涵盖范围极广。
常见的传感器有:1.光学传感器:用于测量光、颜色、亮度等。
2.压力传感器:用于测量压强、高度等。
3.温度传感器:用于测量温度等。
4.加速度传感器:用于测量加速度和方向等。
5.陀螺仪传感器:用于测量倾斜角度、旋转速度等。
6.心率传感器:用于测量心率等。
7.环境传感器:用于测量环境参数,如气压、温湿度等。
二、腕式可穿戴设备中传感器的特点与其他智能设备相比,腕式可穿戴设备有其独特的特点,其中包括传感器方面的特点。
1.佩戴方式不同腕式可穿戴设备是通过手腕佩戴,与其他设备相比,其紧密贴合用户,便于记录生活中各项活动。
2.数据量大腕式可穿戴设备中包含的传感器种类较多,能够记录下一系列数据,其中包括用户的坐姿、运动、睡眠、心率等信息。
3.精度要求高腕式可穿戴设备中的传感器精度要求非常高,精确记录活动状态的数据,帮助用户更好地进行健康管理。
三、腕式可穿戴设备中传感器设计原理针对腕式可穿戴设备中传感器的特点,设计原理也需要有所调整。
1. 佩戴方式手腕的曲线被设计为与传感器的尺寸相当,以确保传感器与皮肤紧密贴合,达到更高的测量精度。
手腕的曲线也影响了这些传感器的定位。
每个传感器必须放置在手腕的最佳位置以保证最佳精确度。
单个传感器的定位,以及传感器之间的关系,也影响了系统整体的性能。
2. 电子学处理将传感器与涉及数据的电子学装置结合起来,将感测信号转换为表示所测参数的数字信号。
可穿戴设备中的智能传感器设计与实现
可穿戴设备中的智能传感器设计与实现随着科技的发展和普及,可穿戴设备已经成为很多人生活中的重要组成部分。
这些设备包括腕表、眼镜、手环等等,它们与人的身体连接,可以监测心率、步数、睡眠等指标,并提供用户定制化的数据分析和健康建议。
但是,这种可穿戴设备的核心是智能传感器,传感器的设计和实现,直接影响到可穿戴设备的性能和用户体验。
一、智能传感器的基本原理智能传感器是一种将物理量转化为电信号输出的装置。
它们能够感知生物体的运动和生理状态,比如测量心率、血氧、体温等参数。
其基本原理是利用鸡蛋石原理,即根据物理量的变化,改变传感器内部的电阻、电容、电感等参数,进而输出电信号。
这些电信号被智能芯片采集后,经过一系列处理和算法分析,就可以成为人们能够理解和利用的数据。
二、智能传感器的拓扑结构智能传感器的拓扑结构是指传感器内部的电路连接方式。
一般来说,智能传感器的拓扑结构分为三种:桥式、共模、差分式。
桥式结构:桥式结构是一种常见的及准确的传感器结构,因其有二次灵敏度而被称为完全桥。
传感器所测量的受力或应变将会通过四个电阻变化而变化,二次变化也将会通过不同输出漂移。
不同的传感器可能有不同的桥结构。
共模结构:共模结构是一种抗干扰能力和低噪声的传感器结构,其中最常用的是开关式传感器,传感器在获得信号时开关闭合,从而获得一个可定位的信号,同时减少不必要的噪音。
差分结构:差分结构是一种高精度的传感器结构,可提供良好的抗干扰性和线性范围。
三、智能传感器的应用范围智能传感器的应用范围非常广泛,不仅涵盖了健康管理和运动监测,还涉及到机器人、环境监测等领域,尤其是在实时监测和大数据分析方面有着广泛的应用。
1. 健康管理领域:智能传感器在健康管理领域发挥着重要的作用,包括睡眠监测、心率监测、血氧监测等,能够通过数据分析和算法计算提供个性化的健康建议。
2. 运动监测领域:智能传感器在运动监测领域也有着广泛的应用,包括长跑速度、步数、运动距离等信息的监测。
【doc】机器人腕力传感器标定矩阵的解

机器人腕力传感器标定矩阵的解机器人腕力传感器标定矩阵的解华中工学院黄心汉摘要:本文给出了求解帆器凡腕力{专感器标定矩阵的一组公式,由于推寻过理中考虑了传感器输出通道数或输出敬据(读数)的个数的影响,从而完满地解决了腕力传感器的标定算法,这种算对于具有不同捡测能力和不同输出敬据通道的腕力传感器都是逼用的.一,前言目前腕力传感器在机器人的力反馈控制和顺应控制中占有主导地位,这是因为腕力传感器不仅具有检测精度高,剐度大,计算简单的忧点,同时由于它是一个完整稻独立的检测装置.可以很方便地安装在任何类型的机器人操,乍手上,田于它的安装部位紧靠机器人的终端执行器(手爪),其检剐结果比较准确且不受操怍手结构参数的影响,因而受到用户的欢迎和广泛的采嗣.目前美国市场上巳出现了机器人腕力传惑器产品,为AsTEK公司生产的As—TEKFS6-1~OA系列产品就是一种高精度,高集成度的六轴集成化腕力传感器.(图1)其参数和主要性能指标见裘1.图IASTEKFS6—120A机器人腕力传惑器通用腕力传感器应能检测3个力分量和3个力矩分量(分剐对应传感器坐标系的x,Y,z三个坐标轴).因此叉叫六轴腕力传惑器.但由于腕力传感器的内部结构采用了各种不同的/设计方案.其输出数据的通道数不尽相同,这给婚惑器的标定恬来一定困难.例如前面提到48t机器人技术t袭1ASTEKFSG一120A腕力悖盛葺参敲硬性睫指标功能测曩錾负载麓三个力分量和三个:负载能力I力一2o0牛顿,力矩一4牛顿米矗负磊另蠢一~~;童I_—_力二o.1,力矩一0.o02牛采精度02满负载漂移Ia.1%/℃最大负载测量额率I500赫兹一,.}.——一一———.——————~——————输出形式l通道独立输出模拟量和数字量外型尺寸jl20毫米直径,55毫米高的园控体一一~~…一一一重量r05公斤…~——~一——过载保护}机械式过载保护图2ASTEK腕力作图3SCHEINMAN腕感器弹性体结构力传感器弹性体结构的ASTEK腕力传感器的弹性体采用的是非径向三横桨结构(图2).它有六条独立的输出数据通道(文献E97)}由斯坦福大学人工智能研究所设计的SCHErNMAN腕力传感器的辞谜体则采用马尔提斯十字粱(MalteseCross)结构(图8).它有八条数据通道输出(文献3]).不同的输出数据通遭数要求用不同的解算方法求出它的标定矩阵,布鲁斯?辛门罗(BruceE.Shimaz~o)曾给出了有八条数据通道的SC["NMAN腕力感器橼定矩强:的算诖(文献[4j).可惜他的结论是锩误的;孝旧和孬油-李'C.S.GeorgelPc);l正了他的错跌,重新推导出正确岣米(文献[5]),但只解决了具有八条数据通道的腕力传巷器的替定算法.术文给出的三千公式山于考虑了不同数据通道刭懈算结果的影响.从而两地解决了腕力传感器的标定问题二,腕力传感器的标定所谓腕力传惑器f岛标定.就是寻找传感器的输读数与对应的作用在传感器坐标原点上的力痢之岣数最关系,:童种关茅可描述成f=C?e(1)式巾,,=[,,…,.]是作在传感器坐标系上的等效力量它的6个分量{}】的前3个表示力分量,后3个则表示力矩分最,这些力分景和力矩劳?显分刑对应传感器坐标系的X.Y, 三个坐标轴;£=Isl£…B],是传感器输出读数列向量,表示读数的个数,也就是传感器输出数据自皇独立通道数:C是传感器的标定矩阵,它就是要求的将读转换成力向量的6×k常数矩阼由于结构和制造工艺上的原因,几乎每一个作用到传感器上的力分量都会对传惑器输出读数产生影响,这就是所谓力对读数的偶合作用这种偶台作用的数学特征是标定矩阵中所有6Xk个矩阵元素都不为零,因此标定矩阵应表示成f" (1)c:}.:¨?I(2)L:::.JCB1C02…CBK应该指出标定矩阵的解是建立在传感器弹性体在其弹性范围内具有良好线性度从而满足叠加原理的基础之上的在传感器的设计中应该考虑并满足这一要求.但由于力向量-的各个分量对传感器输出滂数有偶合作'lJI标定矩阼很难用计算方法直接获得一般足先通过验得到必要的数据,然肟再进行解葬才能得到完整的标定矩阵为了解出杯定矩阵中6xk个元素Co(f1,2…6;,=1,2.….^),要先给传惑器施加6个线性独立的力向量(具体步骤和方法见文献[4])并读职6个对应的读数列向量将这6个力向量构造或一个6x6的力矩阵F, 6个读数列向量则可构成…个k×6的读数矩阵£,这样(1)式可写lF=C.£(8)式中标定矩阵C应该是一个6×k的常数矩阵, 不同的k值,fl{I传感器的数据通道数不同,矩阵方程(3)的解是不列的,下面我们分别舟绍不同值的矩阵方程(8)的解.1.当k>6时,读数据阵£是一个kx6的列满秩矩阵,根据线睦代数理论(文献[]),它存在右伪逆阵,因而不能直接期求逆的方式解出标定矩阵,为此将(8)式转置得F=£.C(4)上式等同于£C.=f.(f=1,26)(5)式中.c=Jc-2…c],,i=If.1,--,ie].由于k>6,£是一个6X的行满秩矩阵,因此(5)式有无穷组解,可从这些解中寻找一个最小二乘近似解a.,满足这个最小二秉近似解的充分必要条件是[一(£),f]=0(6)式中')是£的伪逆阵,由于£是6×k的行满秩阵故有右伪逆阵存在且为(8)=(£)[£(£)]即(8r)=e(8r8)(7)由(6)式得£.=8r(£),i(8)由于l"aak[££(8r),.]=ranke:6,方程(8)机嚣人技术-4g的解存在.故有^i=(£)f.(9)0.是所有最小二乘近似解中具有最小模的解.因此又叫做最小模解,这也即是伪逆阵含有的几何毒义,其物理意义是县有最小蘸量的解.它对应腕力传感器弹性体的最小变形.将(7)式代入(9)式得8.=£(££)f.4i=1.2.---6)410)这等同于矩阵方程=£(£E)F(11)将上式转置后得到0=F(EE)一E(12)这就是当k>6肘确定标定矩阵的最小模解,由于它是一个近似解,做应用约等号.≈来描述这个结果,即C≈F(£e)一£418)这说明当标定矩阵是一个行满秩阵(k>6)时, 只能得到它的近似解.根据文献6].当h=8时.这个解大约会产生1到8的误差.2.当k<6时,读数矩阵£是一个k×6的行满秩阵.故它有右伪逆阵且为e:£(£8)'(14)用e右乘(8)武得F£=C££式中,££=E£4Ee)=I,是一个k×k单位阵,故有C=F£(££)一(15)8.当k=6时.读数矩阵£和标定矩阵C都是6×6的方阵.这样可直接对(8)式进行求逆运算得到标定矩阵的精确解为C=F£416)这就回答了为什么大多数传惑器特月是通用的腕力传感器产品都采用6个数据通道的设计方案的问题.田为它不仅简化了计算.而且解的结果是精确的见表2.寰2ASTEKFS6一]2QA亦抽腕力传瘩■的标定魍阵9.9】70E一036.9932E一02—3.4255E一03—7.3517E—O2一B.Is01E—O4—2.5a19E一04,5-9~lOE一034.0607E一02].]472E一034.2112E一02—8.5G61E一03—8.2337E 一0213.g799E一02—1.7995E—O33.7549E一021.1]014E一033.B066E一029.5S31E 一04f一1.4057E一018.0322E一01—9.1306E一017.8844E一0】9.7057E一0]一1.5779E+00j1.0g49E+00—1.4220E+00—7.,1241E一011.4058E00—3.7381E一01—2.0843E一03l一1.3375E一01一g.07fiE一01—4.424qE一02一g.4035E一0】一7.1919E一02一一9.3712E一01/由^Ⅱ标定的力的苴位是牛顿,力矩单位是牛顿米理论上讲.对于具有任意个数据通道的腕传感器标定矩阵的三个公式,它是以能检测6力传感器都可根据上述三个公式分别解出它们个力分量(8个力和8个力矩分量)的腕力传感的标定矩阵.但输出通道数太少.数据采集量器为依据的.对于某些检测能力低于6个力分也少,就愈难满足各自由度上线性度的要求;量的力传感器.文中给出的解算方法也同样适反之,输出通道数太多,虽然数据采集量丰富,用.只要把传感器的输出通遭数划分成大于,但估计算量增加.计算结果不准确.同时还会小于或等于力分量的个数三种情况.就呵分别导致传感器的结构变得十分臃肿复杂.输出通用式(13),(16)或(16)求出传感器的标定矩遭数等于6时.不但计算结果准确.计算过程阵,这就是说,本文给出的计算方法完满地解也最简单.故目前怍为产品的腕力传感器(如决了具有不斌检测能力和任意个数据通道数的美国的ASTEKFS6-120腕力传感器等)大都腕力传感器标定矩阵的术解途径.采用6个输出数据通道的设计方案.参考文献三,结论根据线性代数理论.本文给出了求解腕力50-机器凡技术-Ei]Wu,C.H.,"ComplianceControlofaRobotManipulatorBasedOffJoint下转第17页-_^咛礼,,九五印.I~'吖li∽ILIJllUr图7不同速度F训j星机反馈电压的毁渡(经2.4ms滤垃)比可达∞:3,但FlY输出没有测速机反馈电压所舍有的系统脉宽嗣制频率(2C)干扰噪声,此噪声既使经25ms的滤波,幅值仍有±0.1伏以上,这对位置环中工作于脉冲沿信号状态的数字逻辑器件的工作可靠性是很有意义的,若纹渡量不足满足系统指标要求.还可在满足(21)式的前提下,适当增大,图图8"口=3.5ms,每分钟1转述度下FIY的输出8给出了.=8.5时的纹波波形,宴验表明F/V变换器同慢,相输出的线性变化是令人满意的.别.称度稍有…点偏差(<2)对位置伺般系统,由于转速的平稳性最终还要受到位置环的删节,加上电机和机诚惯量的滤披作用,y/v变换器在低速时所产生的速度反馈电压纹波,只要不超过一定范围对电机实际运行的平稳性并不产生显着影响.同样, 电机的运行速度,最终也将由位置环输入的指令频率决定,若不相符台,位置环将参与调整,因丽,宴验证明FlY输出的速度反馈电压正反略有些不对称,也币会对执行机构的正确运行产生显着影响.五,结论在位置伺服系统中,运用F/f,变换技术,既可实现位置,转速检测同用一测量元阵,省去测速机.简化系统结构,降低成本,又可方便地引八复合控制,改善系统佳能,同时过兼有降低干扰噪声的作甩.满足(19)式的伺服系统,采用本文所述的简单F/变换器,足可满足工程要求参考文献[1]划伯春.复台控制伺服系统,'工业自动化教与学》】984年3月[3]张新昌.集成运算放大器的应用,高等教育出版社1985年11月[3]陈伯时.自动控制系统,机械工业出版社1981年7月[]真壁国昭壬一步制,碑用IC使0,方于二.,sept.1g86上接第50页TorqueServo.TheInternationa1Jou,aalofRoboHesResearck.V o1.4f3),pp.55—71,1985.[2]ASTEKEnglneeringInc.ASTEKFS8—12OForceSensorDoeumantation,1981.3]Scheiman,VD.,'DesignOfaCompu—letControlledManipulator.Staaford Artificia1Into"igenceProject.Memo№.9P,June19Gg.[4]ShimaDO,B.E.,TheKinematic DesignandForceControlofComputer ControlledManipUlators.StⅫford ArtificialIntelligenceLaboratory. MemoAIM一313,1978.[5]李克明,C.S.GeorgeLeeE机器』,碗音力洚惑器的标定,机械=业自动化学会工业机器^委员会成立论文,1983.!】.[8]韩京清,向关钰,许可废线性系统埋论代数坫,辽宁祠学技术出版社.pP.3Bg一372.1985.电气传动和自动控制?17。
融合模式识别算法的智能手环设计与实现

融合模式识别算法的智能手环设计与实现第一章引言随着时代的发展和人们健康意识的增强,智能手环产品得到了广泛的关注和应用。
智能手环可以通过感知人体运动和生理状态来进行健康管理和运动监测等功能,同时也可以作为智能生活的载体来提供更多的便利和体验。
为了使智能手环更加智能化和人性化,需要对其设计与实现进行深入的研究和探讨。
本文以融合模式识别算法的智能手环设计与实现为主题,对智能手环技术进行了相关的分析和研究。
第二章智能手环的设计要素2.1 传感器技术智能手环需要通过传感器技术来感知人体的运动和生理状态,主要包括加速度传感器、陀螺仪、心率传感器、温度传感器、气压传感器等。
这些传感器技术的应用可以充分发挥智能手环的监测和管理功能,同时也须考虑传感器的精度和稳定性等因素。
2.2 硬件平台智能手环的硬件平台是保障智能手环正常运作的基础,包括主控芯片、储存芯片、通讯模块等。
其中主控芯片是整个智能手环的核心,需要具有高运行速度和低能耗等特点。
同时,为保证智能手环的稳定性和存储数据的倍数,储存芯片和通讯模块的选择也极为重要。
第三章模式识别算法及其应用3.1 模式识别算法模式识别算法是一种能够从数据中发现规律和模式的算法技术,主要分为监督学习和无监督学习两类。
监督学习主要是通过给定的训练数据进行学习,为后续输入数据进行分类或预测提供依据。
无监督学习则是不依赖于先验知识和训练数据的情况下,从数据中发现规律并进行分类和预测。
模式识别算法在画像识别、语音识别、信号处理和数据挖掘等领域中广泛应用。
3.2 模式识别算法在智能手环中的应用智能手环应用模式识别算法可以对人体运动状态、睡眠状态、健康数据、行为数据等进行分类和预测。
例如,通过运用监督学习算法,将人体在不同的运动状态下所产生的数据进行分类,可以实现智能手环对人体运动状态的自动识别。
除此之外,还可以通过预处理和分析手环采集到的心率、温度、气压等指标,对人体健康状况进行分析和预测,提供个性化的健康管理方案。
腕力传感器多维时序建模

腕力传感器多维时序建模
徐科军;杜涛
【期刊名称】《自动化仪表》
【年(卷),期】1994(015)001
【摘要】腕力传感器有六路输出信号,表示三维空间的力和力矩信息。
本文采用多维时间序列法,首次建立腕力传感器多维AR模型,其结果与实验数据吻合,全面反映动态响应过程和各输出量之间的联系。
【总页数】3页(P3-5)
【作者】徐科军;杜涛
【作者单位】不详;不详
【正文语种】中文
【中图分类】TP212
【相关文献】
1.一类多维时序模型的建模及应用 [J], 夏学文
2.机器人腕力传感器时序建模与频谱分析 [J], 徐科军;邹锦
3.多维时序可控模型的建模 [J], 林循泓;李大仰
4.基于模糊多属性决策的多维时序信用风险评价建模 [J], 张洪祥;毛志忠
5.基于ADSP的腕力传感器自适应多维动态补偿器 [J], 徐科军;江敦明;王国泰因版权原因,仅展示原文概要,查看原文内容请购买。
一种新结构的智能化六维腕力传感器

一种新结构的智能化六维腕力传感器
王巍;崔维娜
【期刊名称】《测控自动化》
【年(卷),期】2005(21)3
【摘要】本文首先提出了一种新结构的水下机械手用六维腕力传感器;然后为其设计了信号放大、滤波和调零电路;最后,设计了以内置CAN总线控制器的
80C592单片机为核心的传感器信号解耦和通讯单元.使该传感器成为一个独立的智能化单元。
【总页数】3页(P54-56)
【作者】王巍;崔维娜
【作者单位】北京航空航天大学机器人研究所100083;北京化工大学74信箱100029
【正文语种】中文
【中图分类】TP212.6
【相关文献】
1.一种改进的六维腕力传感器 [J], 孙松良;刘正士;王勇;朱光胜
2.一种机器人腕力传感器弹性体结构设计与力学性能分析 [J], 郑朝阳
3.一种新型的机器人柔性腕力传感器的研究 [J], 崔泽;赵杰;赵明国;蔡鹤皋
4.一种新结构的智能化六维腕力传感器 [J], 王巍;崔维娜
5.一种机器人六维腕力传感器的标定方法 [J], 郑朝阳;翟其建;赵金鹏
因版权原因,仅展示原文概要,查看原文内容请购买。
一种机器人六维腕力传感器的标定方法

一种机器人六维腕力传感器的标定方法郑朝阳;翟其建;赵金鹏【摘要】该文结合所用六维腕力传感器的结构形式提出了其标定的方法,分析了传感器耦合的原因,对解耦的方法进行了研究,用试验方法对传感器进行了标定,得出了标定矩阵C,运用Matlab软件对各单维力/力矩的试验结果进行了线性拟合,结果显示线性化较好,弹性体结构设计合理,试验验证后结果显示标定矩阵C误差较小,符合机器人使用要求.最后分析了标定中误差产生的原因,提出了减少误差的措施,具有重要的工程实践意义.%Combined with the structure of the six dimensional wrist force sensor,the calibration method was put forward,the reason of the sensor coupling was analyzed,the decoupling method was studied,the sensor was calibrated using test method,the calibration matrix C was obtained,the test results of each couple/torque were fitted by Matlab software,the results show that the linearization is good,the elastomer structure design is reasonable,the results show that the error of the calibration matrix C is small,which meets the requirements of the robot.Finally,the causes of the errors in calibration are analyzed,and the measures to reduce the errors are proposed,which have important engineering practical significance.【期刊名称】《自动化与仪表》【年(卷),期】2018(033)001【总页数】6页(P41-45,50)【关键词】机器人;六维力;传感器;标定方法;误差分析【作者】郑朝阳;翟其建;赵金鹏【作者单位】中国船舶重工集团公司第七一六研究所,连云港222006;中国船舶重工集团公司第七一六研究所,连云港222006;中国船舶重工集团公司第七一六研究所,连云港222006【正文语种】中文【中图分类】TH16对于机器人腕力传感器来说,由于结构复杂、加工误差以及弹性体结构质地的不均匀性等各方面因素的影响,使得传感器各输出通道之间存在相互耦合,这种耦合的关系很复杂,难以从理论上进行精确的描述[1],需要采用试验的方法来进行标定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
出的 SAFMS 型六维腕力传感器机械结构 如图 1 所 示. 也 有 采 用 薄 壁 圆 桶 型 结 构 3 及 非 经 向 三 梁 结 构 4 . 传感器轴心安装在手臂上 而外缘连结机器人 手. 2. 2 信号传感方式
3 简 化 的 智 能 腕 力 传 感 器 ( Simplif ied intelligent wrist f orce transducer)
3. l 机械结构 为简化贴片 作者采用了图 2 所示的弹性体三
主梁结构. 为方便加工 三主梁在一平面内且相互成 l20 角. 在主梁与轮缘联结处采用浮动梁柔性环节使 受力均匀.
fz~ mx 或 my 引起主梁正面弯曲变形. 如 fz 引起主梁 正面 1~ 2~ 3~ 4 均弯曲; mx 引起主梁正面 2~ 4 弯曲; my 引起主梁正面 1~ 3 弯曲变形. 因此 只要在主梁的前 后安装测力元件 就可以测量 fz~ fx~ fy 的值.
图 1 十字梁结构主梁贴片示意图 Fig. 1 Main beam labelling slice schematic
六维力~ 力矩与应变电阻( 或相应输出电压) 间 的关系 可以分别通过施加标准的力与力矩矢量 f(f 的方 向 可 以 是 六 个 基 本 方 向~ 两 个 其 它 的 适 当 方 向) 并同时测取转换电路输出的对应于应变电阻的 电压信号矢量 U; 零点误差及重力影响校正可通过减 去不加外力时的输出电压来实现. 这 8 对矢量组成 了两矩阵 F6> 8 与 V8> 8. 在 弹 性 限 度 内 f 与 U 间 成 线 性关系 即 f = CV 其中 C 为 6> 8 的耦合系数矩阵. 对这 8 次测试 则有
过传感器的线性变换形成了输出电压 V 的值域空
间 而根据线性空间有关定理 值域空间维数小于等
于原线性空间 Rn 的维数 6 因此 8 次测量的电压矢 量间线性相关 另两个方向的测量值仅是基本(正 交) 方向上测值的线性组合. 因此在理想的机械结构 及线性情况下 矩阵 V 的秩为 6 从而造成了矩阵 V 或 VV/ 不存在逆的情况 致 使 无 法 求 取 系 数 矩 阵 或 系数矩阵不确定 或在实际情况下 某些系数过大
中图分类号: TP24
文献标识码: B
DESIGN OF AN IN TELLIGEN T WRIST FORCE TRAN SDUCER
TANG ~ui-giang ~UAN G Wei-yi
( T e Depa7tment Of lnSt7/ment Sczence and engznee7zng SO/t eaSt Unz e7Szty Nanjzng 210096)
第 25 卷第 1 期 2003 年 1 月 文章编号: 1002-0446( 2003) 01-0053-04
机器人 ROBOT
Vol. 25 No. 1 Jan. 2003
智能化腕力传感器的设计
唐慧强 黄惟一
( 东南大学仪器科学与工程系 南京 210096)
摘 要: 本文分析了十字梁结构六维腕力传感器的工作原理与存在问题 提出了简化应变电阻贴片~ 机械结
现场校正 并把耦合系数矩阵存储于电可改写串行
F = CV
( 3)
因此 我们可以方便地求得
C = FV-1
( 4)
பைடு நூலகம்
超过 8 次测试时 利用最小二乘法可得
C = FV/ ( VV/ ) -1
( 5)
其实 仅求算 6 个力分量 但作了 8 次测试来取
得 8 应变电阻对应的电压输出. 立体空间中的三维
力与三维力矩 F 构成了 6 维线性空间 Rn 测量时经
2 腕 力 传 感 器 工 作 原 理 ( Working principle of the wrist f orce transducer)
2. 1 常用腕力传感器的机械结构
腕力传感器需测定三维空间的力与力矩信号
目前已经有多种结构形式 1 . 一般采用斯坦福大学人 工智能研究所的轮辐式十字梁结构 2 . 在弹性体的十 字主梁与轮缘联结处采用浮动梁柔性环节 形成间
构~ 电路与数据处理的智能化设计方案. 本文提出的三主梁结构传感器中 用六个应变电阻来测量六维力. 因此 简
化了应变电阻~ 放大~ 模数转换电路 利用 PIC14000 微控制器采样数据求算出实际的力与力矩值. 采用 I2C 总线 根
据上位机要求发送所需的测量值与微分信号等数据.
关键词: 机器人; 腕力传感器; 微控制器
Abstract: The Working principles and the eXisting problems of the crossbeam structure Wrist f orce transducer With siX-degree-of -f reedom are analyZed and an intelligent scheme that reduces the number of strain gauges and simplifies the mechanism structure the electric circuits and the data dealing is proposed. In the three main beam transducer proposed in this paper only siX strain gauges are reguired to measure the siX-degree-of -f reedom f orce. So the strain gauge amplif ier and A D converter circuits are f urther simplif ied and the micro-controller PIC14000 is used to sample the data and convert them into actual force and moment values. With the I2C bus the measured value and differentials can be transmitted to the host.
由于机械结构及其应变电阻的一致性较差 传
感器需作标定 以求出系数矩阵. 分别在 6 个基本方 向 施 加 标 准 力 矢 量 f 即 构 成 矩 阵 F6> 6 同 时 测 得 6 个电阻相应的电压值 U 矢量 以 构 成 矩 阵 V6> 6 利 用 公 式 C= FV-l 即 可 得 耦 合 系 数 矩 阵. 当 测 试 次 数 超 过 6 时 则同样可以由 C= FV/ ( VV/ ) -l 求取. 耦合 系 数矩阵 C 可事先在 PC 机上容易地利用高级语言来 求取 也可由微控制器完成但较费时 其优点是可以
图 2 三主梁带柔性环节的六维腕力传感器 Fig. 2 6-D wrist f orce transducer f or three main
beam with flexible joints
3. 2 受力分析 受力 fI~ fy 或 m 时 引起主梁的侧面弯曲变形;
受力 f ~ mI 或 my 时 引起主梁的正面弯曲变形. 因 此 可以在主梁的三正面及三侧面共粘贴六个应变 片来测量受力大小 如图 2 所示. 当 I 方向受力时 R4 R5 减小 R6 增大. y 方向受力时 R4 R6 减小 R5 不变. 方向上受力时 Rl R2 R3 均减小. I 方向受力 矩时 R2 减小 Rl R3 增大. y 方向受力矩时 R3 减 小 Rl 增大 R2 不变. 方向受力矩时 R5 R6 增大 R4 减小. 因此有
这意味着采用 8 个应变电阻时信息冗余. 解决办法之一是减小矢量 V 的分量数. 通过上
述受力分析 在理想的情况下有
fx = f(R6 + R8) fy = f(R5 + R7) fz = f(R1 + R2 + R3 + R4)
( 6) mx = f( R2 - R4) my = f( R3 - R1) mz = f( R5 - R6 - R7 + R8) 因此 利用 R6+ R8~ R5+ R7~ R5-R6-R7+ R8~ R2-R4~ R3-R1~ R1+ R2+ R3+ R4 六个分量或对应 的电压量 V 来建立与 F 间的关系. 各个基本方向上 施 加 力 矢 量 测 量 6 次 后 得 F6> 6 及 V6> 6 从 而 有 C=
fI = f( R4 R5 R6) fy = f(R4 R6) f = f(Rl R2 R3)
( 7) mI = f( Rl R2 R3) my = f( Rl R3) m = f(R4 R5 R6)
通过以上受力分析可知 不同方向受力时各电
阻的变化是不同的 因此 可以通过六个应变电阻的
测量来求取力矢量. 3. 3 腕力传感器的标定
Keywords: robot Wrist f orce transducer microcontroller
1 引言( Introduction)
腕力传感器是机器人手臂与手爪相联接的力觉 传感器 利用它来测量机器人手的受力情况并实现 力反馈控制. 东南大学曾与合肥智能所联合研制了 SAFMS 型六维腕力传感器 采用 十 字梁 结 构. 之后 我们提出了柔性环节的十字梁结构以改善传感器线 性. 本文进一步分析研究了腕力传感器结构及其受 力测量方法 利用微控制器技术设计了智能化的腕 力传感器 从而直接输出有关已校正的力~ 力矩及其 微分的数字信号.
第 25 卷第 l 期
唐慧强等, 智能化腕力传感器的设计
55
FV-l . 当 测 试 次 数 超 过 6 时 则 C= FV/ ( VV/ ) -l 其 中 C 为 6> 6 列的矩阵.