输入捕捉
10比较和捕获单元(CCP)
27
输出比较模式的电路结构
输出比较模式的电路结构如图10.2所示
图10.2输出比较模式电路结构
28
输出比较模式的工作机制
由程序初始化设定好CCPx模块为输出比较模式后,图 10.2中的比较部分的硬件电路不断地将CCPRx中的值 与TMR1中的值进行比较,一旦相匹配就由图中左边 部分经输出控制逻辑电路、R-S触发器、受控三态门 后从RC2/CCP1引脚输出下列4种情况之一的信号,并 置位CCPxIF中断标志及引起相应的事件
预分频器和边沿检测电路仅工作在输入捕捉模式,在 其他工作模式下,预分频器将保持为0,对单片机的 任何方式复位,将使预分频器清零。
21
使用输入捕捉模式的注意事项
当捕获到设定的边沿时,TMR1中的16位值是一次性 被读到CCPRx中,能准确记录事件发生的时刻,这与 在TMR1的中断中读取TMR1的值不同,后者因响应 中断需要时间,读取TMR1时要分高、低读取,这些 都会引入误差。
殊事件:对CCP1,将复位TMR1;对CCP2,将复位 TMR1并启动ADC(若ADC已被使能); 上述4种情况由CCP控制寄存器CCP1CON的低4位: CCP1M3~CCP1M0的设置决定 在输出比较模式下,RC2/CCP1引脚必须设为输出
31
使用输出比较模式的注意事项
输出比较模式下RC2/CCP1引脚的输出电平由CCPx模 块内的R-S触发器决定,与其输出比较的工作状态有 关,而与RC2用作普通I/O口时的输出锁存器无关,也 即,此时不能用指令对其作置位或清零操作。
17
使用输入捕捉模式的注意事项
当CCPx工作于输入捕捉模式时,TMR1必须设为定时 方式或同步计数方式(时钟源来自外部引脚或自带的 振荡器),否则CCPx输入捕捉模式就不能正常工作。
神奇宝贝指令

神奇宝贝指令神奇宝贝(Pokémon)是一款由Game Freak开发并由任天堂发行的游戏系列。
玩家在游戏中扮演训练师,通过捕捉、培养和对战神奇宝贝来完成不同的任务。
为了更好地控制和训练神奇宝贝,指令是玩家们必须要了解和掌握的重要部分。
本文将详细介绍一些常用的神奇宝贝指令。
1. 抓捕指令首先是抓捕指令,玩家可以使用该指令来捕捉野外出现的神奇宝贝。
指令的格式如下:捕捉(神奇宝贝名字)例如,如果你想要捕捉皮卡丘(Pikachu),你可以输入以下指令:捕捉皮卡丘系统将根据你的操作和神奇宝贝的属性来判断捕捉的成功率。
一旦捕捉成功,你就可以将该神奇宝贝添加到你的队伍中。
2. 战斗指令战斗是神奇宝贝游戏的核心部分之一。
当你与其他训练师或野外的神奇宝贝进行对战时,你需要使用一些战斗指令来控制你的神奇宝贝。
以下是一些常用的战斗指令:•攻击指令使用该指令来让你的神奇宝贝进行攻击。
指令的格式如下:攻击(技能名字)例如,如果你的神奇宝贝会使用十万伏特(Thunderbolt)技能,你可以输入以下指令:攻击十万伏特•防御指令使用该指令来让你的神奇宝贝进行防御,减少对方的伤害。
指令的格式如下:防御•道具指令使用该指令来使用背包中的道具。
指令的格式如下:使用(道具名字)例如,如果你想要使用复活草(Revive)道具来恢复你的神奇宝贝的生命值,你可以输入以下指令:使用复活草•逃跑指令使用该指令来尝试逃离战斗。
指令的格式如下:逃跑以上是一些基本的战斗指令,你还可以通过了解更多的技能和策略来提升你的游戏技巧。
3. 交换指令除了与其他训练师进行对战外,玩家还可以与其他玩家进行神奇宝贝的交换。
交换指令可以帮助你与其他玩家进行神奇宝贝的交换。
以下是一些常用的交换指令:•抛出指令使用该指令来抛出你想要交换的神奇宝贝。
指令的格式如下:抛出(神奇宝贝名字)例如,如果你想要交换你的皮卡丘,你可以输入以下指令:抛出皮卡丘•确认指令使用该指令来确认交换请求。
Chromium网页输入事件捕捉和手势检测过程分析
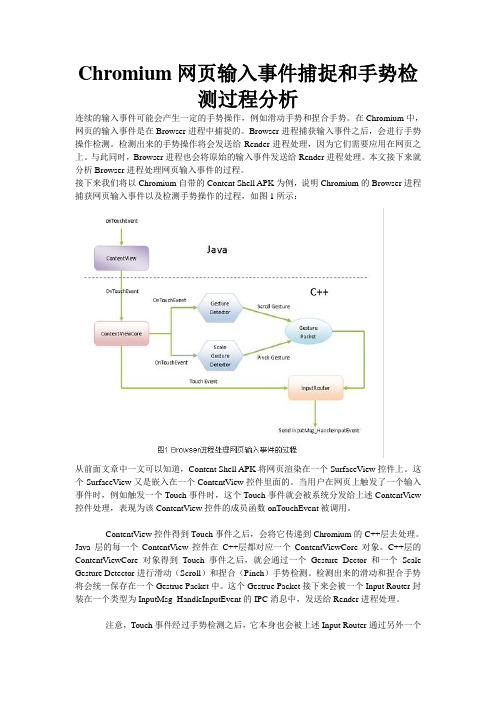
Chromium网页输入事件捕捉和手势检测过程分析连续的输入事件可能会产生一定的手势操作,例如滑动手势和捏合手势。
在Chromium中,网页的输入事件是在Browser进程中捕捉的。
Browser进程捕获输入事件之后,会进行手势操作检测。
检测出来的手势操作将会发送给Render进程处理,因为它们需要应用在网页之上。
与此同时,Browser进程也会将原始的输入事件发送给Render进程处理。
本文接下来就分析Browser进程处理网页输入事件的过程。
接下来我们将以Chromium自带的Content Shell APK为例,说明Chromium的Browser进程捕获网页输入事件以及检测手势操作的过程,如图1所示:从前面文章中一文可以知道,Content Shell APK将网页渲染在一个SurfaceView控件上。
这个SurfaceView又是嵌入在一个ContentView控件里面的。
当用户在网页上触发了一个输入事件时,例如触发一个Touch事件时,这个Touch事件就会被系统分发给上述ContentView 控件处理,表现为该ContentView控件的成员函数onTouchEvent被调用。
ContentView控件得到Touch事件之后,会将它传递到Chromium的C++层去处理。
Java层的每一个ContentView控件在C++层都对应一个ContentViewCore对象。
C++层的ContentViewCore对象得到Touch事件之后,就会通过一个Gesture Dector和一个Scale Gesture Detector进行滑动(Scroll)和捏合(Pinch)手势检测。
检测出来的滑动和捏合手势将会统一保存在一个Gestrue Packet中。
这个Gestrue Packet接下来会被一个Input Router封装在一个类型为InputMsg_HandleInputEvent的IPC消息中,发送给Render进程处理。
cad对象捕捉和动态输入实验报告

cad对象捕捉和动态输入实验报告实验目的:掌握CAD软件中的对象捕捉和动态输入功能,能够灵活运用这些功能进行绘图和设计。
实验材料:一台已安装CAD软件的电脑。
实验步骤:1. 打开CAD软件,在新建文件中进行绘图准备。
2. 对象捕捉功能的使用:a. 在CAD软件的工具栏中,找到对象捕捉选项(常用的有端点、中点、圆心等),点击选择需要的对象捕捉点。
b. 将鼠标移动到需要捕捉的对象附近,捕捉到目标点后,会出现捕捉捷径点,点击确定捕捉。
3. 动态输入功能的使用:a. 在CAD软件的工具栏中,找到动态输入选项,点击打开或关闭动态输入面板。
b. 动态输入面板会显示当前鼠标的坐标和绘图时的长度、角度等参数。
c. 通过动态输入功能,可以在绘制过程中直接输入准确的数值,而不需要手动去测量或估算。
4. 根据需要进行绘图和设计,通过对象捕捉和动态输入功能来辅助完成各种绘图操作。
5. 实验结束后保存绘图结果。
实验注意事项:- 在使用对象捕捉功能时,要仔细选择需要捕捉的对象,避免捕捉到错误的点。
- 在使用动态输入功能时,要注意输入的数值是否准确,避免输入错误导致绘图结果出错。
- 实验过程中注意保护好绘图文件,及时保存以防止数据丢失。
实验报告内容:1. 实验目的:简述实验的目的和意义。
2. 实验步骤:详细描述实验的步骤和操作过程。
3. 实验结果:列举实验中使用对象捕捉和动态输入功能所绘制的图形,并说明每个图形的用途和特点。
4. 实验总结:总结实验过程中遇到的问题和解决方法,对对象捕捉和动态输入功能的应用进行评价,并提出改进意见。
注意:根据实际情况修改实验步骤和实验报告内容,确保符合实际需求。
输入捕捉
/********以下是延时函数********/
void Delay_ms(uint xms)
{
int i,j;
for(i=0;i<xms;i++)
{ for(j=0;j<1140;j++) ; }
}
/********以下是端口初始化函数********/
void port_init()
6. avr定时器/计数器1 --TC1 --输入捕捉模式(捕获外部事件模式)
T/C的输入捕捉单元可用来捕获外部事件,并为其赋予时间标记以说明此时间的发生时刻。外部事件发生的触发信号由引脚ICP1 (PD6)输入,也可通过模拟比较器单元来实现。时间标记可用来计算频率、占空比及信号的其它特征,以及为事件创建日志。当引脚ICP1上的逻辑电平(事件)发生了变化,或模拟比较器输出ACO电平发生了变化,并且这个电平变化为边沿检测器所证实,输入捕捉即被激发:16位的TCNT1数据被拷贝到输入捕捉寄存器ICR1,同时输入捕捉标志位ICF1置位。如果此时ICIE1 = 1,输入捕捉标志将产生输入捕捉中断。中断执行时ICF1自动清零,或者也可通过软件在其对应的I/O位置写入逻辑"1”清零。读取ICR1时要先读低字节ICR1L,然后再读高字节ICR1H。读低字节时,高字节被复制到高字节临时寄存器TEMP。CPU读取ICR1H时将访问TEMP寄存器。
操作步骤:
一、捕获输入端口初始化:捕获输入端ICP1(PD6)设为输入,DDRD&=(0<<PD6);
并使能PD6口的内部上拉电阻,PORTD|=(1<<PD6);
二、设置定时器的工作模式:TCCR1A=0X00 //普通模式,计数最大值为65535
输入捕捉中断编程实例
#pragma abs_address:0xffdc
void (* const _vectab[])(void) = {
isrDummy,//Timebase
isrDummy,//ADC
isrDummy,//KBI
isrDummy,//SCI TC/TE
isrDummy,//SCI RF/IDLE
isrDummy,//SCI PE/FE/NF/OR
isrDummy,//SPI TE
isrDummy,//SPI MOD/OVR/RF
isrDummy,//TIM2 OVR
isrDummy,//TIM2 channel 1
isrDummy,//TIM2 channel 0
isrDummy,//TIM1 OVR
*[中断向量]
ORG $FFF6 ;定时器1通道0输入捕捉中断向量
DW Tim1CH0Int
ORG $FFFE ;复位向量
DW MainInit
*Tim1CH0Int:定时器1通道0输入捕捉中断子程序-------------*
*功能:定时器输入捕捉中断处理,开关拨动时指示灯PTA.1闪烁*
*入口:无*
*出口:无*
*------------------------------------------------------*
Tim1CH0Int:
LDA #%00110000
STAT1SC
;[输入捕捉模式,允许输入捕捉中断,跳变沿捕捉]
LDA #%01001100
STAT1SC0
;[允许定时器1计数寄存器计数]
BCLR 5,T1SC
CLI ;开总中断
;[主循环开始]
stm32PWM输入捕获
stm32PWM输入捕获tm32定时器pwm输入捕获输入捕捉的功能是记录下要捕捉的边沿出现的时刻,如果你仅仅捕捉下降沿,那么两次捕捉的差表示输入信号的周期,即两次下降沿之间的时间。
如果要测量低电平的宽度,你应该在捕捉到下降沿的中断处理中把捕捉边沿改变为上升沿,然后把两次捕捉的数值相减就得到了需要测量的低电平宽度。
如果要的测量低电平太窄,中断中来不及改变捕捉方向时,或不想在中断中改变捕捉方向,则需要使用PWM输入模式,或使用两个TIM某通道,一个通道捕捉下降沿,另一个通道捕捉上升沿,然后对两次捕捉的数值相减。
PWM输入模式也是需要用到两个通道。
使用两个通道时,最好使用通道1和通道2,或通道3和通道4,这样上述功能只需要使用一个I/O管脚,详细请看STM32技术参考手册中的TIM某框图。
//0-----------------------一、概念理解PWM输入捕获模式是输入捕获模式的特例,自己理解如下1.每个定时器有四个输入捕获通道IC1、IC2、IC3、IC4。
且IC1IC2一组,IC3IC4一组。
并且可是设置管脚和寄存器的对应关系。
2.同一个TI某输入映射了两个IC某信号。
3.这两个IC某信号分别在相反的极性边沿有效。
4.两个边沿信号中的一个被选为触发信号,并且从模式控制器被设置成复位模式。
5.当触发信号来临时,被设置成触发输入信号的捕获寄存器,捕获“一个PWM周期(即连续的两个上升沿或下降沿)”,它等于包含TIM时钟周期的个数(即捕获寄存器中捕获的为TIM的计数个数n)。
6.同样另一个捕获通道捕获触发信号和下一个相反极性的边沿信号的计数个数m,即(即高电平的周期或低电平的周期)7.由此可以计算出PWM的时钟周期和占空比了frequency=f(TIM时钟频率)/n。
dutycycle=(高电平计数个数/n),若m为高电平计数个数,则dutycycle=m/n若m为低电平计数个数,则dutycycle=(n-m)/n 注:因为计数器为16位,所以一个周期最多计数65535个,所以测得的最小频率=TIM时钟频率/65535。
第五章 IO端口、输入捕捉
• 图5-2: 共用的端口结构框图
• 5.3.1 I/O 与多个外设复用
• 对于有些dsPIC30F 器件,尤其是那些带有少量 I/O 引脚数较少的器件,其每个I/O 引脚可能要 复用多种外设功能。图5-2 所示为两个外设与同 一个I/O 引脚复用的示例。
• 和TRISx 寄存器以及该端口引脚将读作0
5.3 外设复用
• 当某个外设使能时,与其相关的引脚将被禁止作为通 用I/O 引脚使用。可以通过输入数据路径读该I/O 引脚, 但该I/O 端口位的输出驱动器将被禁止。
• 与另一个外设共用一个引脚的I/O 端口总是服从于该外 设。外设的输出缓冲器数据和控制信号提供给一对多 路开关。该多路开关选择是外设还是相关的端口拥有 输出数据的所有权以及I/O 引脚的控制信号。图11-2 显示了端口如何与其他外设共用,以及与外设连接的 相关I/O 引脚。
• 参照图5-2,外设多路开关的结构将决定外设输 入引脚是否可以通过使用PORT 寄存器用软件控 制。
• 当图中所示的概念化的外设在功能被使能时,会断开 I/O 引脚与端口数据的连接。一般而言,下列外设允许 通过PORT 寄存器手动控制它们的输入引脚:
• 外部中断引脚 • 定时器时钟输入引脚 • 输入捕捉引脚 • PWM 故障引脚 • 大多数串行通信外设在使能时,将完全控作0 • bit 13 ICSIDL:输入捕捉模块在空闲时停止控制位 • 1 = 输入捕捉模块在CPU 空闲模式将停止 • 0 = 输入捕捉模块在CPU 空闲模式将继续工作 • bit 12-8 未用:读作0 • bit 7 ICTMR:输入捕捉定时器选择位 • 1 = 捕捉事件时捕捉TMR2 的内容 • 0 = 捕捉事件时捕捉TMR3 的内容 • 注: 可供选择的定时器可能会和上述不同。 更多详细
CCU6 输入捕获/输出比较单元6

比较 1
1
死区时间 控制
1
多通道控 制
trap 控制
3+3 2 2 2
3
1
捕获/比较 输入/输出 选择
端口控制
2009-1-21
E1 Training
Copyright © Infineon Technologies 2008. All rights reserved.
Page 7
输入捕获/输出比较单元6(CCU6) 用于电机控制的结构图
定时器 T13时钟 分频器( 1~128
)
FCPU
Input Control
Compare Timer 10/16 bit
16位定时器T13,只 能工作在比较模式 。主要用于调制的 场合。
PPeeriroioddRReegg. .
deadtime Control
Burst Mode
CCoComCmMpMpPRP2Re2geg. .
预分频
1: N
fper
N=1,2,4,8,16,32,64,128,256;x=0,1,2
E1 Training
Copyright © Infineon Technologies 2008. All rights reserved.
Page 10
输入捕获/输出比较单元6(CCU6) T12映射传送
2009-1-21
E1 Training
Copyright © Infineon Technologies 2008. All rights reserved.
工作寄存器
至硬件
Page 11
输入捕获/输出比较单元6(CCU6) T12比较模式
中心对齐方式:
利用AVR(M8)的输入捕获(ICP)对万能红外线遥控器进行解
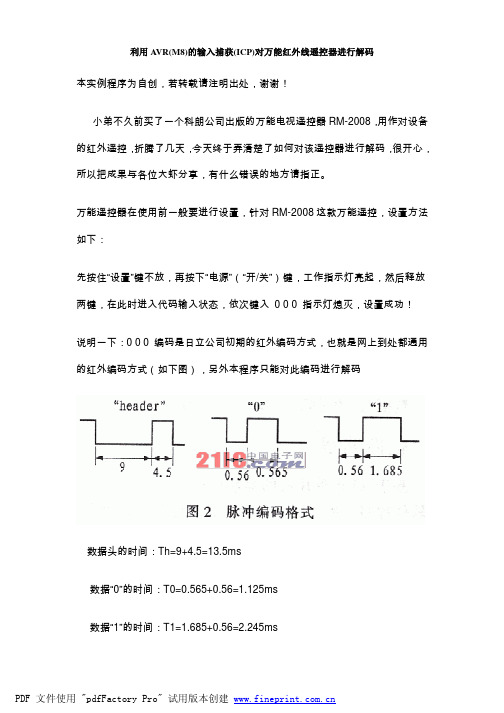
利用A VR(M8)的输入捕获(ICP)对万能红外线遥控器进行解码本实例程序为自创,若转载请注明出处,谢谢!小弟不久前买了一个科朗公司出版的万能电视遥控器RM-2008,用作对设备的红外遥控,折腾了几天,今天终于弄清楚了如何对该遥控器进行解码,很开心,所以把成果与各位大虾分享,有什么错误的地方请指正。
万能遥控器在使用前一般要进行设置,针对RM-2008这款万能遥控,设置方法如下:先按住“设置”键不放,再按下“电源”(“开/关”)键,工作指示灯亮起,然后释放两键,在此时进入代码输入状态,依次键入0 0 0 指示灯熄灭,设置成功!说明一下:0 0 0 编码是日立公司初期的红外编码方式,也就是网上到处都通用的红外编码方式(如下图),另外本程序只能对此编码进行解码数据头的时间:Th=9+4.5=13.5ms数据“0”的时间:T0=0.565+0.56=1.125ms数据“1”的时间:T1=1.685+0.56=2.245ms本程序通过使用输入捕获功能(ICP)捕捉红外信号的高电平脉宽,达到解码的目的;如果捕获到的脉宽是4.5ms 则表示此信号为同步码,如果捕获到的脉宽是1.685ms 的话则表示“1”否则表示“0”测试电路如下:使用DNW 串口调试软件时的效果/////////////////////////////////只有一个文件main.c/////////////////////////////////// #include <avr/io.h>#include <avr/signal.h>#include <avr/interrupt.h>#include <avr/wdt.h>#include <util/delay.h>#include <stdio.h>/*----------------------遥控操作值--------------------*/// key code (hex)#define Key_1 0x01#define Key_2 0x02#define Key_3 0x03#define Key_4 0x04#define Key_5 0x05#define Key_6 0x06#define Key_7 0x07#define Key_8 0x08#define Key_9 0x09#define Key_0 0x00#define Menu 0x5c // 菜单#define Menu_up 0x56 // 菜单上#define Menu_down 0x57 // 菜单下#define Menu_left 0x5f // 菜单左#define Menu_right 0x5b // 菜单右#define Menu_ok 0x16 // 菜单确认#define Channel_up 0x1b // 频道+ #define Channel_down 0x1f // 频道- #define Sound_up 0x1e // 音量+ #define Sound_down 0x1a // 音量- #define Open_Close 0x12 // 开/关#define Mute 0x10 // 静音#define Pic_in_pic 0x51 //画中画#define Standard 0x58 // 制式#define Return 0x52 // 返回#define Times 0x0b // 倍数#define Screen 0x16 // 屏幕#define Audio 0x1d // 伴音#define NICAM 0x13 // 丽音#define TV_Vedio 0x0f // 电视/视频#define Sleep 0x0e //睡眠/*----------------------常用参数定义-------------------*/ #define P0 0#define P1 1#define P2 2#define P3 3#define P4 4#define P5 5#define P6 6#define P7 7#define FREQ 8 //定义单片机工作频率为8M#define uint unsigned int#define uchar unsigned char#define Start_T1 TCCR1B|=_BV(CS11);TCNT1=0//复位预计分频器并开启定时器T1#define Stop_T1 TCCR1B&=~_BV(CS11) //关闭定时器T1/*-----------------IR信号指示灯操作函数---------*/#define EN_IR_LED DDRB|=_BV(P1)#define CLR_IR_LED PORTB&=~_BV(P1)#define SET_IR_LED PORTB|=_BV(P1)/*----------------------某些端口操作-------------------*/volatile unsigned char i,j,k;volatile unsigned long IRcode; //定义一个长度为4字节的无符号long 类型变量来存储代码volatile unsigned char *IRcodePointer ; //定义一个无符号的单字节指针变量,//用此地址变量来分别读取IRCode的//4个字节其中操作码为IRcodePointer[2]//用户码为IRcodePointer[0]volatile unsigned char IRReceiveEffective=0; //IR信号接收有效当程序响应接收以后请马上清零这样才会继续接收下一IR码volatile unsigned char IRReceiveCurrentBit=0; //IR信号当前接收位0时表示第0位即同步码(4.5ms高电平)volatile unsigned int Pulse_length=0; //捕获的脉冲宽度volatile unsigned char ICP_Parity=0; //捕获中断奇偶次计数1时为偶次并在此时判断脉宽volatile unsigned char Received_Key_Temp; //红外接收操作键缓存const unsigned char String[]={"You Have Press Key : "};/*----------------------串口定义-------------------*/unsigned char SetPrintfConvertMode=0; //使用printf作其他转换,并非输出到UARTvoid Uart_Init(void);int System_putchar(char c, FILE *stream);int System_getchar(FILE *stream);FILE mystd = FDEV_SETUP_STREAM(System_putchar,System_getchar,_FDEV_SETUP_RW);/*----------------------常用函数定义------------------*/void delay_nms(unsigned int ms) //N ms延时函数{for(i=0;i<ms;i++)_delay_loop_2(FREQ*250);}/*----------------------系统初始化函数定义------------------*/void IO_INIT(void){PORTB|=_BV(P0); //设置ICP引脚内部上拉经过试验验证,上拉会提高红外接收灵敏度}ISR(TIMER1_COMPA_vect){IRReceiveCurrentBit=0;//重置IR接收位为第0位,为下次接收做准备TIMSK&=~_BV(OCIE1A); //关闭溢出中断TCCR1B|=_BV(ICES1); //设置输入捕获上升沿有效ICP_Parity=0;Stop_T1;CLR_IR_LED;}ISR(TIMER1_CAPT_vect){if(!IRReceiveEffective){if(ICP_Parity==0){ICP_Parity++;TIMSK|=_BV(OCIE1A);TCCR1B&=~_BV(ICES1); //设置输入捕获下降沿有效Start_T1 ;}else{Stop_T1;ICP_Parity=0;TCCR1B|=_BV(ICES1);//设置输入捕获上升沿有效Pulse_length=ICR1;if(IRReceiveCurrentBit==0){if(Pulse_length>=3500&&Pulse_length<5500)// 如果是引导码(4.5ms) 进入下一个bit的读取IRReceiveCurrentBit++;}else if(IRReceiveCurrentBit<33) //接收32位数据{IRcode>>=1;if(Pulse_length<1900&&Pulse_length>1400) //判断是否为1 ( 1.685 ms) IRcode|=0x80000000;IRReceiveCurrentBit++;if(IRReceiveCurrentBit==33){IRReceiveCurrentBit=0; //重置IR接收位为第0位,为下次接收做准备if(IRcodePointer[0]==(unsignedchar)(~IRcodePointer[1])&&IRcodePointer[2]==(unsignedchar)(~IRcodePointer[3])){SET_IR_LED; //开启IR信号指示灯IRReceiveEffective=1; //数据有效}delay_nms(5); //因为32位数据后面还有一个信号上跳变,所以要适当延时,延时0.65ms以上即可}}}}}/////////////////////////////////////////////////////////////////int main(void){wdt_disable();IO_INIT();Uart_Init();TCCR1B=_BV(WGM12)|_BV(CS11);//采用8分频这样的话TCNT1的计数时基为1usOCR1A=8000; //TCNT1 计数上限设置IR接收超时这里设置8msTIMSK|=_BV(TICIE1);//开启输入捕获中断TCCR1B|=_BV(ICES1);//输入捕获上升沿有效EN_IR_LED; //IR信号指示灯允许CLR_IR_LED; //关闭IR信号指示灯IRcodePointer=&IRcode;sei();while(1){if(IRReceiveEffective){Received_Key_Temp=IRcodePointer[2];//把接收到的操作键放入缓存IRReceiveEffective=0; //允许下一次接收switch(Received_Key_Temp){case Key_1 : printf("\n%sKey_1",String);break;case Key_2 : printf("\n%sKey_2",String);break;case Key_3 : printf("\n%sKey_3",String);break;case Key_4 : printf("\n%sKey_4",String);break;case Key_5 : printf("\n%sKey_5",String);break;case Key_6 : printf("\n%sKey_6",String);break;case Key_7 : printf("\n%sKey_7",String);break;case Key_8 : printf("\n%sKey_8",String);break;case Key_9 : printf("\n%sKey_9",String);break;case Key_0 : printf("\n%sKey_0",String);break;case Menu : printf("\n%sMenu",String);break;case Menu_up : printf("\n%sMenu_up",String);break;case Menu_down : printf("\n%sMenu_down",String);break;case Menu_left : printf("\n%sMenu_left",String);break;case Menu_right : printf("\n%sMenu_right",String);break;case Menu_ok : printf("\n%sMenu_ok",String);break;case Channel_up : printf("\n%sChannel+",String);break;case Channel_down : printf("\n%sChannel-",String);break;case Sound_up : printf("\n%sSound+",String);break;case Sound_down : printf("\n%sSound-",String);break;case Open_Close : printf("\n%sOpen_Close",String);break;case Mute : printf("\n%sMute",String);break;case Standard : printf("\n%sStandard",String);break;case Return : printf("\n%sReturn",String);break;case Times : printf("\n%sTimes",String);break;//case Screen : printf("\n%sScreen",String);break;//Screen 与menu_ok 值相同case Audio : printf("\n%sAudio",String);break;case NICAM : printf("\n%sNICAM" ,String);break;case TV_Vedio : printf("\n%sTV_Vedio",String);break;case Sleep : printf("\n%sSleep",String);break;case Pic_in_pic : printf("\n%sPic_in_pic",String);break;default:printf("\n%sOther Key 0x%x",String,Received_Key_Temp);break;}CLR_IR_LED; //处理完数据以后关闭IR信号指示灯}}}/*----------------------串口函数实体------------------*/void Uart_Init(void){UCSRB=_BV(RXEN)|_BV(TXEN);UBRRL=25; //8M 19200stdout=&mystd;stdin=&mystd;}int System_putchar(char c, FILE *stream){if(SetPrintfConvertMode==1){}else{if (c == '\n')System_putchar('\r', stream);loop_until_bit_is_set(UCSRA, UDRE);UDR = c;}return 0;}int System_getchar( FILE *stream){loop_until_bit_is_set(UCSRA,RXC);return UDR;}/////////////////////////////////程序结束////////////////////////////。
PWM输入模式捕捉4路PWM的周期和占空比

PWM输入模式捕捉4路PWM的周期和占空比PWM(Pulse Width Modulation,脉宽调制)输入模式是指将PWM信号通过输入端口接收,并对其周期和占空比进行捕捉和测量的功能。
在PWM输入模式下,通常可以选择4路PWM输入捕捉模式,即可以同时对4个PWM信号的周期和占空比进行测量。
首先,对于周期的测量,可以通过输入捕捉寄存器(ICR)来实现。
当PWM信号的边沿触发输入捕捉事件时,输入捕捉寄存器会记录当前计数器的值,从而获取到PWM信号的周期。
通过记录两个连续输入捕捉事件的时间差,即可计算出周期。
其次,对于占空比的测量,可以通过输入捕捉寄存器(ICR)和捕捉/比较寄存器(CCR)来实现。
当PWM信号的上升沿触发输入捕捉事件时,输入捕捉寄存器会记录当前计数器的值;当PWM信号的下降沿触发输入捕捉事件时,捕捉/比较寄存器会记录当前计数器的值。
通过获取这两个值的差,即可计算出PWM信号的高电平时间,并通过除以周期得到占空比。
需要注意的是,在进行PWM输入捕捉时,需要先配置相应的引脚为输入模式,并使能输入捕捉功能。
具体配置过程可以参考具体的MCU开发手册或者技术文档。
总结起来,PWM输入模式可以实现对4路PWM信号的周期和占空比的测量,通过配置相关寄存器可以获取PWM信号的周期和占空比,以满足不同的应用需求。
PWM输入模式捕捉4路PWM的周期和占空比

④While(1){}
主程序那三个打印语句我就不讲了,这个都不会,那么你就该补补了。
三、四路PWM程序讲解
TIM3定时器引脚映射到了PC6 PC7 PC8 PC9上了。
四、PWM输入捕捉程序讲解:
①void TIM4_PWMINPUT_INIT(u16 arr,u16 psc)
这个函数我在源码里面已经注释的很清楚了,有几个点需要大家注意
②TIM_SelectInputTrigger(TIM4, TIM_TS_TI2FP2);
这个是选择有效的输入端 ,我这里TIM_TS_TI2FP2选择的PB7,注意:只有TI1FP1和TI2FP2连到了从模式控制器,所以PWM输入模式只能使用TIMx_CH1 /TIMx_CH2信号。
③TIM_SelectSlaveMode(TIM4, TIM_SlaveMode_Reset);
2) 原理也讲过了,那么下面就是实战了
一、操作步骤:
①将我的源码从论坛里面下载下来
②用杜邦线将PB7和PC6连接起来
③将编译完成的hex文件下载到开发板
④打开串口调试助手波特率选9600
⑤按下开发板的复位键,OK那么你就能看到串口的打印信息。
⑥用杜邦线依次将PB7和PC7、PB7和PC8、PB7和PC9连接起来,看串口打印不同占空比和相同周期的信息。
这个是配置为PWM输入主从复位模式,就是每次输入端有效电平变化的时候定时器计数器就会硬件上置0
中断函数讲解
于AVR单片机输入捕捉功能的频率计设计

第六品 观相属
丁四(相属及相违之证知方式)分二:一、总说;二、别说。
戊一、总说:
所有遮破及建立,观待相违相属故,
观察正量法相前,当析相违及相属。
量、非量等所有一切破立无不观待相违及相属,因此,在观察量的法相真理之前先要分析相违与相属。
戊二(别说)分二:一、观察相属;二、观察相违。
还有些人说:诸如眼睛看色法之类的事物,是一种接触相属。
此外,也有人说,诸如,杜鹃与燕子,是主仆关系,天鹅与黄野鸭是配偶相属……,愚者们众说纷纭。
承许外境有相属,依观一异而遮破。
若谓俱有等相属,以遣余连而理解。
俱有者等有能害,若无能害摄二中。
下面将这所有观点综合在一起加以破斥:承认外境上存在相属,是他体法不可能有一体相属、是一体法则自己与自己不可能相属的道理按照前文中的观察已经遮破完毕。
个别愚者谓无实,亦有同品之相属。
藏地个别愚笨论师声称:不仅(有实法存在相属),而且无实法也有同品相属。并进一步陈述理由说:以离一多因等理由建立所破不可能存在,建立法是无遮〔推理公式:一切法(有法),不存在(立宗),离一多故(因)〕。可见,如果同品与违品的两种关系都不存在,那么无相属的因就应该有现世的可能了。因此,尽管同品相属存在,但由于人们没有认识才导致观待确定违品相属。
癸二、破种类相属:
有谓自相无相属,因果种类有相属。
种类若是因果性,不离先前之过咎,
若除此外种类有,总时遮破已究竟。
辩方立宗道:因果自身的法相虽然不存在相属,但因果的种类却存在相属。
驳:请问种类到底是指什么?假设说是因果的自身法相,那么前面的过失依然无法摆脱。如果认为所谓的种类,除此之外另行有他体存在,这一点在前文中破“总”的时候已经予以否定了。
CAD中自动捕捉设置教程
CAD中自动捕捉设置教程CAD(计算机辅助设计)是广泛应用于建筑、工程和制造等行业的软件工具。
CAD的功能强大,可通过合理的设置和使用技巧提高工作效率。
今天,我们将重点讨论CAD中的自动捕捉设置教程,这是一个非常实用的功能,能够快速准确地捕捉到需要的位置和对象。
在CAD中,设置自动捕捉有助于我们对准确性要求高的对象进行定位和调整。
下面将详细介绍如何设置和使用自动捕捉功能。
1. 打开CAD软件并创建新的绘图文件。
2. 在CAD界面上方的菜单中选择“设置”选项,并选择“草图设置”或“绘图设置”(具体名称可能因不同版本而有所不同)。
3. 在设置界面中,找到“捕捉和跟踪”选项。
这里是我们进行自动捕捉设置的地方。
4. 在捕捉选项中,我们可以看到各种捕捉对象和捕捉点的选择。
常见的捕捉对象包括端点、中点、插入点、交点等。
您可以根据实际需要勾选相应的选项。
5. 在捕捉点选项中,我们可以选择是否开启对象捕捉。
勾选上“对象捕捉”选项后,在绘制或编辑对象时,鼠标指针将会自动捕捉到对象的重要点,如端点、中点等。
这样一来,我们可以更方便地进行精确的绘制和调整。
6. 您还可以自定义对象捕捉的优先级顺序,以确保CAD能够按照您的意图进行捕捉。
您可以通过拖动各个捕捉选项的顺序来调整捕捉的优先级。
7. 除了对象捕捉,CAD还提供了跟踪和辅助捕捉的选项。
跟踪功能可以帮助我们确定几何对象的对齐或距离关系,而辅助捕捉功能则可以帮助我们捕捉到对象的特定关键点。
8. 在自动捕捉设置完成后,您可以通过按下“F9”键来启用或关闭捕捉功能。
一旦开启,鼠标指针将会自动捕捉到指定的对象或点。
9. 在使用CAD时,为了更好地利用自动捕捉,您可以结合使用快捷键。
例如,在绘制直线时,按下“L”键激活直线命令,然后按下“@”键,接着输入自动捕捉点的坐标,即可直接绘制一条线段。
10. 最后,当您完成CAD设计或绘图工作后,可以再次按下“F9”键来关闭自动捕捉功能。
CAD中的对象捕捉和捕捉跟踪的快捷键命令
CAD中的对象捕捉和捕捉跟踪的快捷键命令在CAD中,对象捕捉(Object Snap)和捕捉跟踪(Tracking)是快捷键命令,它们是CAD软件中非常实用且必不可少的功能。
通过对象捕捉和捕捉跟踪,我们可以准确地选择和跟踪特定的图形对象,极大地提高了绘图的效率和准确性。
一、对象捕捉的快捷键命令对象捕捉允许我们在绘图时吸附或捕捉到特定的点、线、圆等实体,以便更精确地绘制和编辑图形。
下面是一些常用的对象捕捉快捷键命令:1、端点(Endpoint):通过键盘输入“ENDP”或者按下F3键,启用端点对象捕捉。
选中该捕捉点后,鼠标指针会自动吸附到线条端点上,便于我们对线条进行编辑和绘制。
2、中点(Midpoint):输入“MID”或按下F2键,启用中点对象捕捉。
启用后,我们可以轻松地将鼠标指针吸附到线段、圆弧等的中点位置,方便进行绘图和编辑。
3、节点(Node):输入“NOD”或按下F9键,启用节点对象捕捉。
启用后,我们可以准确地选择、编辑曲线或多边形的节点,确保图形的准确性。
4、拐角(Intersection):输入“INT”或按下F6键,启用拐角对象捕捉。
该功能主要用于在两个线条或弧线交叉的点位置进行标注或编辑。
5、垂足(Perpendicular):输入“PER”或按下F8键,启用垂足对象捕捉。
启用后,我们可以很方便地选择一条线段或弧段的垂直位置,便于进行绘图和编辑。
6、切点(Tangent):输入“TAN”或按下F7键,启用切点对象捕捉。
该功能主要用于选择两个弧线或曲线的切线交点。
二、捕捉跟踪的快捷键命令捕捉跟踪是CAD软件中的另一个重要功能,通过捕捉跟踪,我们可以快速、高效地绘制和编辑图形。
下面是一些常用的捕捉跟踪快捷键命令:1、直线(Line):输入“L”或按下F11键,启用直线捕捉跟踪。
启用后,我们可以在绘图过程中跟踪另一条直线的路径,以达到与之相平行或相垂直的效果。
2、偏移(Offset):输入“O”或按下F10键,启用偏移捕捉跟踪。
捕捉输入机会 优化语言输入 促进语言吸收
语文 学刊 ( 外文 版)
20 0 6年 第 2 期
国国翰 觇
镌 国富国
饵固国宫咽衄
0孙 军秀
( 南科技 大 学, 南 湘潭 湖 湖 4 10 ) 1 2 1
[ 摘 要] 在语言学习方面. 没有输入就没有输 出. 语言输入在语言学习中起着至关重要的作用。而语言输
[ 键词 ] 语言输入; 关 语言吸收f 输入机会
[ 中图分 类号 ]G44 2
前
[ 文献 )2O 1—3 6 28 1(0 60一l90
出的话题 ; 语言输入 的最 佳项 目是学 习者身边 的 事物 和 思 想 ; 有 效 地 保 证 学 习 者 在 理 解 话 语 方 向 的 前 提 在
言
在 语 言 学 习 方 面 , 有 输 入 (n u ) 没 有 输 出 没 ip t 就 ( up t , 言 输 入 在 语 言 学 习 中 起 着 至 关 重 要 的 作 o tu ) 语 用l 而语 言输 入 是 一 个 内 化 (n a e 的 过 程 , 语 言 输 itk ) 在 入 与 语 言 习 得 之 间 , 一 个 “ 言 吸 收 ” itk ) 阶 有 语 (na e 的
动 性 的关 键 所 在 。在 该 环 节 中 , 拉 申认 为 , 个 人 在 克 一
习得第二语言过 程中接 触许 多语 言材 料 , 可称 为输入
(n u) 学 习者 对 于 输 入 的语 言 材 料 , 习得 的 只是 一 ip t , 可 小 部 分 , 称 为 “ 收 ” itk ) 被 吸 (n a e 。Ro l dEls也 认 为 , i 输 入 只 有 “ s i ltd 才 能成 为 吸 收 儿 asmi e ” a 。
CCU输入捕获/输出比较单元

输入捕获/输出比较单元6(CCU6)英飞凌XC800系列单片机写在前面本篇内容为英飞凌科技有限公司(Infineon Technologies CO., LTD.)的XC800系列单片机的基础篇之一。
如无特别说明,所指的产品为XC800系列单片机中的首款型号:XC866。
由于后续芯片会有更多的改进/增加措施,如需要关注其它产品,需要再结合相应的产品数据手册(Data Sheet)和用户手册(User Manual)! 由于版本更新等原因,可能会出现各版本间的资料说法有略微差异,请以英飞凌网站公布的最新英文版本的产品数据手册(Data Sheet)和用户手册(User Manual)为准!资源简介CCU6单元中有两个独立的计数器:T12和T13,可被用来产生脉宽调制(PWM)信号,尤其适用于控制交流电机的应用场合。
CCU6支持用于块交换和多相电机的专用控制模式。
除了适合电机控制以外,CCU6单元还可以单独用作输入捕捉和输出比较的应用。
3路捕获/比较通道,每路可用作捕获或比较通道。
支持产生三相PWM(6路输出,对应上桥臂或下桥臂开关)。
16位精度,最大计数频率=外设时钟频率。
单通道死区时间控制,避免功率级短路。
同步刷新T12/T13寄存器。
产生中间对齐和边缘对齐PWM。
支持单次模式。
支持多中断请求源。
类磁滞控制模式。
单一比较通道,单输出。
16位精度,最大计数频率=外设时钟频率。
可与T12同步。
周期匹配和比较匹配,产生中断。
支持单次模式。
3+3捕获比较输入/输出选择端口控制16位定时器T12,带有映射寄存器3通道寄存器并带有映射寄存器比较模式边沿/中心对齐方式映射传输时,映射寄存器中的内容传送到实际工作寄存器 输出引脚的状态根据比较结果进行翻转占空比可由0~100%进行调节捕获模式定时器T12的捕获值可由通道寄存器读出可用于脉冲宽度的测量等领域= 1?= ?= ?= 0?T12PRCC6xR T12PSCC6xSRT12计数16 Bit预分频1: N比较值映射传输周期值映射传输比较-匹配周期-匹配0-匹配(边沿对齐模式)1-匹配(中心对齐模式)161616f per在捕获模式下,T12的值复制到CAPCOM 的相应寄存器中。
gd32 定时器输入捕获中断处理函数

gd32 定时器输入捕获中断处理函数(原创版)目录1.gd32 定时器输入捕获中断处理函数概述2.gd32 定时器输入捕获中断处理函数的工作原理3.gd32 定时器输入捕获中断处理函数的应用实例4.gd32 定时器输入捕获中断处理函数的优势与局限正文一、gd32 定时器输入捕获中断处理函数概述gd32 是一款基于 ARM Cortex-M3 内核的嵌入式处理器,在其内部集成了丰富的定时器功能。
其中,定时器输入捕获中断处理函数是 gd32 定时器的一个重要应用,它可以在输入信号发生变化时立即触发中断,实现对输入信号的高效捕捉和处理。
二、gd32 定时器输入捕获中断处理函数的工作原理gd32 定时器输入捕获中断处理函数的工作原理主要分为以下几个步骤:1.配置定时器:首先,根据需求配置定时器的相关参数,如时钟源、计数周期等。
2.设置输入捕获通道:根据需求选择定时器的输入捕获通道,并设置相应的触发条件。
3.开启中断:在定时器配置完成后,开启定时器输入捕获中断,使定时器在输入信号发生变化时能够触发中断。
4.编写中断处理函数:根据实际需求编写定时器输入捕获中断处理函数,实现对输入信号的处理。
5.执行中断处理函数:当输入信号发生变化时,定时器输入捕获中断处理函数将被执行,实现对输入信号的捕捉和处理。
三、gd32 定时器输入捕获中断处理函数的应用实例gd32 定时器输入捕获中断处理函数在实际应用中具有广泛的应用,例如:1.触摸屏检测:通过定时器输入捕获中断处理函数,可以实时检测触摸屏的触摸事件,实现对触摸屏的快速响应。
2.按键检测:在按键输入设备中,可以使用定时器输入捕获中断处理函数实时检测按键的状态变化,实现对按键的快速响应。
3.传感器数据采集:对于周期性变化的传感器数据,可以通过定时器输入捕获中断处理函数实时捕捉传感器数据,提高数据采集的实时性和准确性。
四、gd32 定时器输入捕获中断处理函数的优势与局限gd32 定时器输入捕获中断处理函数具有以下优势:1.实时性强:在输入信号发生变化时,能够立即触发中断,实现对输入信号的快速捕捉和处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
输入捕捉时,此位无用。
10.4 定时器模块的输出比较功能
通道控制寄存器控制位
MS0B:MS0A X0 X1 00 00 00 01 01 01 1X 1X 1X ELS0B:ELS0A 00 00 01 10 11 01 10 11 01 10 11 工作模式 跳变沿/输出电平 初始输出高电平 初始输出低电平 上升沿捕捉 输入捕捉 下降沿捕捉 跳变沿捕捉 输出电平翻转 输出比较 输出高电平 输出低电平 带缓冲的输出比较 或带缓冲的PWM输 出 输出电平翻转 输出高电平 输出低电平
含义同T1通道0状态和控制寄存器 ,只是没有D5(MS1B)位,因 为MS0B是选择CH0缓冲方式的,CH1没有缓冲方式,所以没有 MS1B位。
10.4 定时器模块的输出比较功能
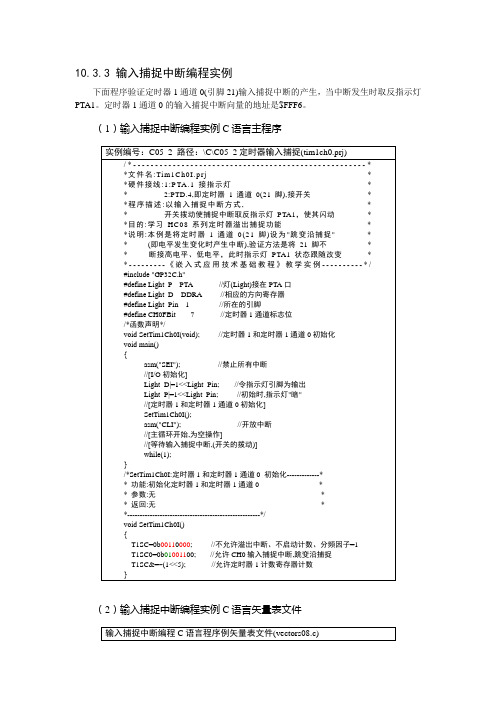
10.3.3 输入捕捉中断编程实例
下面程序验证定时器1通道0(引脚21)输入捕捉中断的产生,当中
断发生时取反指示灯PTA1。定时器1通道0的输入捕捉中断向量的地址
1) MCU方程序
2) PC方VB程序
10.2 定时器模块的编程基础
10.2.3
定时溢出中断编程C语言程序例
1)定时溢出中断编程C语言程序例主程序
2)定时溢出中断编程C语言程序例矢量表文件
10.3 定时器模块的输入捕捉功能
返回
10.3 定时器模块的输入捕捉功能
10.3.1 输入捕捉的基本含义
(1)与输入捕捉功能相关的引脚
在 MC68HC908GP32 的 DIP-40 封 装 形 式 中 , 第 21 、 22 脚 标 记 是 “PTD4/T1CH0、PTD5/T1CH1”,它们是普通I/O与定时器输入捕捉的复 用引脚。作为定时器输入捕捉功能使用时,它们是定时器1的两个通道 输入捕捉引脚。
(2)输入捕捉的基本含义
输入捕捉功能是用来监测外部的事件和输入信号。当外部事件发 生或信号发生变化时,在指定的输入捕捉引脚上发生一个指定的沿跳 变(可以指定该跳变是上升沿还是下降沿)。定时器捕捉到特定的沿 跳变后,把计数寄存器当前的值锁存到通道寄存器。
所以,若要读取整个通道寄存器,必须先读高字节,再读低字节。
10.3 定时器模块的输入捕捉功能
(2)T1通道0状态和控制寄存器(T1 Channel0 Status and Control Register,T1SC0)
数据位
定义 复位
D7
1
D6
1
D5
1
D4
1
D3
1
D2
1
D1
1
D0
1
CH0F CH0IE MS0B MS0A ELS0B ELS0A TOV0 CH0MAX
10.1 计数器/定时器的基本工作原理
MC68HC908GP32 MCU定时器基本功能及主要特征:
HC08系列的单片机定时器具有输入捕捉、输出比较、PWM、脉冲输 出、DMA直接存储器访问等功能。
以下简要给出MC68HC908GP32的定时器的主要特征:
① 每个定时器具有两路独立的输入捕捉/输出比较通道。
10.1 计数器/定时器的基本工作原理
(3)可编程计数器/定时器
利用专门的可编程计数器/定时器实现计数与定时,克服了完全硬 件方式与完全软件方式的缺点,设定之后与CPU并行地工作。应用可编 程计数器/定时器,在简单的软件控制下,可以产生准确的时间延时。
这种方法的主要思想是根据需要的定时时间,用指令对计数器/定时器
设置定时常数,并用指令启动计数器/定时器。这种方法最突出的优点 是计数时不占用CPU的时间,并且,如果利用计数器/定时器产生中断 信号就可以建立多作业的环境,所以,可大大提高CPU的利用率。
10.1 计数器/定时器的基本工作原理
10.1.2 MC68HC908GP32 MCU的定时接口的基本 原理的概述
10.3 定时器模块的输入捕捉功能
10.3.2 输入捕捉的寄存器
(1)T1通道寄存器 (T1 Channel Register)
定时器1有两个通道,相对应的通道寄存器有:①定时器1通道0寄存 器T1CH0(16位寄存器),地址是:$0026、$0027;②定时器1通道1寄存器 T1CH1 (16位寄存器) ,地址是:$0029、$002A。 通道寄存器在该通道用作输入捕捉时的作用是:当指定的沿跳变发 生 (即定时系统捕捉到沿跳变) 时,锁存计数寄存器的值。 通道寄存器是一个16位的寄存器,分为高字节和低字节,在读取的 时候要分别读取。为了防止两次读取之间该寄存器的内容发生变化而产 生虚假的输入捕捉计数值,系统会在读取高字节时锁存低字节的内容, 这时即使又发生特定的沿跳变,通道寄存器的内容也不会改变。
10.2 定时器模块的编程基础
(1)T1状态和控制寄存器(Timer 1 Status and Control Register,T1SC)
D5 — TSTOP位:定时器计数停止位(Timer Count Stop Bit)。 该位用来控制计数器的计数停止和恢复。对该位写入1,定时器的计数 寄存器将保持当前的值,停止计数。 D4 — TRST位:定时器复位位(Timer Reset Bit )。向该位写入1将 清除定时器的计数寄存器和设定的分频因子,该位通常为0。 D3 — 未定义。 D2~D0 — PS2~PS0位:定时器分频因子选择位(Timer Prescaler Select Bits)。这三位定义定时器的分频因子,记为:p,定 义如下: PS2、PS1、PS0=000 001 010 011 100 101 110 111 p =1 2 4 8 16 32 64 未定义 其中设fBUS为总线频率,则定时器的计数寄存器的计数频率为: 计数频率=fBUS/p。复位时,PS2、PS1、PS0=000,即p=1,此时, 计数频率=fBUS。分频因子的选取应根据总线频率fBUS、预置寄存器 的设定值、希望的溢出时间的综合考虑确定。
返回
10.2 定时器模块的编程基础
10.2.1 定时器模块的3个基本寄存器
(1)T1状态和控制寄存器(Timer 1 Status and Control Register,T1SC)
T1SC的地址:$0020,定义为:
数据位 定义 复位 D7 0 D6 0 D5 1 D4 0 D3 0 D2 PS2 0 D1 PS1 0 D0 PS0 0 TOF TOIE TSTOP TRST -
(2)输出比较的含义
输出比较的功能是用程序的方法在规定的时刻输出需要的电平, 实现对外部电路的控制。
10.4 定时器模块的输出比较功能
10.4.2 输出比较的寄存器
(1)T1通道寄存器 (T1 Channel Register)
通道寄存器在该通道用作输出比较时的作用是:存放要与计数寄存 器进行比较的数值。 完整的设置输出比较功能应该包括对寄存器两个字节的写入。通道 寄存器和标志位在复位时被清零,在初始化输出比较功能时应该小心谨 慎,一般采用以下的步骤: ①写入通道寄存器的高位字节,禁止输出比较功能; ②取状态寄存器,清除OCF位; ③写入通道寄存器低位字节,使输出比较功能工作。
第十章 定时接口模块
主要内容
计数器/定时器的基本工作原理
定时器模块的编程基础
定时器模块的输入捕捉功能
定时器模块的输出比较功能 定时器模块的脉宽调制功能
10.1 计数器/定时器的基本工作原理
10.1.1 实现计数与定时的基本方法
(1)完全硬件方式
在过去许多仪器仪表或设备中,需要进行延时、定时或计数,经 常使用数字逻辑电路实现,即完全用硬件电路实现计数/定时功能,若 要改变计数/定时的要求,必须改变电路参数,通用性、灵活性差。微
是$FFF6。 (1)输入捕捉中断编程实例汇编语言程序
(2)输入捕捉中断编程实例C语言主程序
(3)输入捕捉中断编程实例C语言矢量表文件
10.3 定时器模块的输入捕捉功能
返回
10.4 定时器模块的输出比较功能
10.4.1 输出比较的基本含义
(1)与输出比较功能相关的ቤተ መጻሕፍቲ ባይዱ脚
在MC68HC908GP32的DIP-40封装形式中,第21、22脚标记是 “PTD4/T1CH0、PTD5/T1CH1”,它们是普通I/O与定时器输入捕捉的 复用引脚。作为定时器输入捕捉功能使用时,它们是定时器1的两个通 道输入捕捉引脚,同时也可定义它们为输出比较引脚。
型电子计算机出现以后,特别是单片微型计算机的发展与普及,这种
完全硬件方式实现定时与计数已较少使用。
10.1 计数器/定时器的基本工作原理
(2)完全软件方式
在计算机中,通过编程,利用计算机执行指令的时间实现定时,
称为完全软件方式,简称软件方式。在这种方式中,一般是根据所需
要的时间常数来设计一个延时子程序,延时子程序中包含一定的指令, 设计者要对这些指令的执行时间进行严密的计算或者精确的测试,以 便确定延时时间是否符合要求。
D7 :通道标志位,用来标志定时器1通道0发生了输入捕捉。 D6 :通道中断允许位,用来设置是否允许发生输入捕捉中断。 D5~ D4:模式选择位。每一个定时器都可以工作在输入捕捉,输出比较和 PWM输出模式,这两位用来选择这些工作模式。 D3~D2 :跳变沿/ 输出电平选择位。 D1 :溢出翻转控制标志位,定时器通道用做输入 捕捉时,此位无用。 D0 :通道最大占空比设置位 ,定时器通道用作
② 带缓冲(Buffered)和不带缓冲(Unbuffered)的脉宽调制波。 ③ 七种可编程选择的分频因子。 ④ 预置计数。 ⑤ 计数器停止或清除。 ⑥ 16位输入捕捉和通道寄存器。 ⑦ 定时器溢出中断、每路通道的输入捕捉/输出比较中断。
10.1 计数器/定时器的基本工作原理
定时器功能框图
10.3 定时器模块的输入捕捉功能
(3)T1预置寄存器(T1 Counter Modulo Register, T1MODH、T1MODL)