衡星MSP430F5529大作业报告
msp430实验报告

msp430实验报告msp430实验报告引言:msp430是一种低功耗、高性能的微控制器,被广泛应用于嵌入式系统和物联网设备中。
本实验报告将介绍我对msp430微控制器进行的一系列实验,包括实验目的、实验过程、实验结果以及对实验的总结和展望。
实验目的:本次实验的主要目的是熟悉msp430微控制器的基本功能和使用方法,以及学习如何进行简单的控制程序设计。
通过实验,我希望能够掌握msp430的基本操作和编程技巧,并且能够运用所学知识解决实际问题。
实验过程:在实验开始之前,我首先对msp430微控制器进行了一些基本的了解。
我了解到,msp430具有低功耗、高性能和丰富的外设接口等特点,可以满足各种嵌入式系统的需求。
接着,我根据实验指导书的要求,准备好实验所需的硬件设备和软件工具。
第一部分实验是关于GPIO口的实验。
我按照实验指导书上的步骤,将msp430与LED灯连接起来,并编写了一个简单的程序,实现了对LED灯的控制。
通过这个实验,我学会了如何配置GPIO口和编写简单的控制程序。
第二部分实验是关于定时器的实验。
我学习了如何配置msp430的定时器,并编写了一个简单的程序,实现了定时闪烁LED灯的功能。
通过这个实验,我深入了解了定时器的工作原理和编程方法。
第三部分实验是关于ADC的实验。
我学习了如何配置msp430的ADC模块,并编写了一个简单的程序,实现了对外部模拟信号的采样和转换。
通过这个实验,我了解了ADC的基本原理和使用方法。
实验结果:通过一系列实验,我成功地掌握了msp430微控制器的基本功能和使用方法。
我能够独立完成GPIO口的配置和控制、定时器的配置和编程、ADC的配置和采样等任务。
实验结果表明,msp430具有强大的功能和灵活的编程能力,可以满足各种嵌入式系统的需求。
总结和展望:通过本次实验,我对msp430微控制器有了更深入的了解,并且掌握了一些基本的操作和编程技巧。
然而,由于实验时间和条件的限制,我还没有完全发挥出msp430的潜力。
msp430f5529定时器实验
定时器实验一、实验目的1、学习MSP430F5529定时器的使用。
2、学习MSP430F5529定时器相应的寄存器的使用。
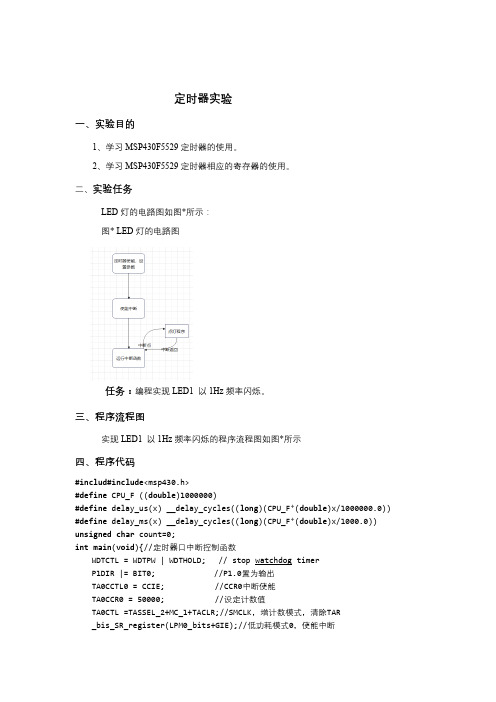
二、实验任务LED灯的电路图如图*所示:图* LED灯的电路图任务:编程实现LED1 以1Hz频率闪烁。
三、程序流程图实现LED1 以1Hz频率闪烁的程序流程图如图*所示四、程序代码#includ#include<msp430.h>#define CPU_F ((double)1000000)#define delay_us(x) __delay_cycles((long)(CPU_F*(double)x/1000000.0)) #define delay_ms(x) __delay_cycles((long)(CPU_F*(double)x/1000.0)) unsigned char count=0;int main(void){//定时器口中断控制函数WDTCTL = WDTPW | WDTHOLD; // stop watchdog timerP1DIR |= BIT0; //P1.0置为输出TA0CCTL0 = CCIE; //CCR0中断使能TA0CCR0 = 50000; //设定计数值TA0CTL =TASSEL_2+MC_1+TACLR;//SMCLK,增计数模式,清除TAR_bis_SR_register(LPM0_bits+GIE);//低功耗模式0,使能中断}#pragma vector=TIMER0_A0_VECTOR__interrupt void TIMER0_A0_ISR(void){count++;if(count==20){count=0;P1OUT ^= BIT0; //1s改变LED1灯状态 }}五、遇到的问题及解决办法无六、实验小结练习了单片机mspf5529的编程。
基于MSP430F5529实现的家用非法闯入检测报警器(何厚衡)

}
进入while循环
}
}
PPT模板下载:/moban/ 节日PPT模板:/jieri/ PPT背景图片:/beijing/ 优秀PPT下载:/xiazai/ Word教程: /word/ 资料下载:/ziliao/ 范文下载:/fanwen/ 教案下载:/jiaoan/
while(1)
P2OUT|=BIT0;//P2.0变为1
{
delay_ms(500);//延迟
delay_ms(500);//延迟
P2IFG&=~BIT4;//清除P2.4的中断标志位
P2OUT|=BIT0; //P2.0恢复初始值
__bic_SR_register_on_exit(CPUOFF);//开启CPU,
void io_init(void)
{
P2DIR|=BIT0;//P2.0为输出
P2OUT|=BIT0;//P2.0初始值为1
P2IES&=~BIT4;//P2.4的中断是上升沿产生中断
P2IE|=BIT4;//P2.4是中断端口
}
void main(voiቤተ መጻሕፍቲ ባይዱ)
#pragma vector=PORT2_VECTOR
基于MSP430F5529实现的
家用非法闯入检测报警器
1 总体方案介绍 2 主要元件介绍 3 电路各模块的介绍 4 程序的介绍 5 总结
电源模块
单片机模块
报警模块
信号传输口
热释电红外模块
BIS0001信号放大模块
#include"msp430f5529.h"
#define CPU_F ((double)1000000) //时钟定义在1MHz
msp430 实验报告
msp430 实验报告MSP430 实验报告引言:MSP430是一款低功耗、高性能的微控制器,广泛应用于嵌入式系统开发领域。
本实验报告将介绍我对MSP430进行的一系列实验,包括基本的GPIO控制、定时器应用、模拟信号采集和通信接口应用等。
实验一:GPIO控制在本实验中,我使用MSP430的GPIO引脚控制LED灯的亮灭。
通过配置引脚的输入/输出模式以及设置引脚电平,我成功地实现了对LED灯的控制。
这为后续实验奠定了基础,也让我更加熟悉了MSP430的寄存器配置。
实验二:定时器应用在本实验中,我探索了MSP430的定时器功能。
通过配置定时器的时钟源和计数模式,我实现了定时器中断功能,并利用定时器中断实现了LED灯的闪烁。
这个实验让我更加深入地了解了MSP430的定时器模块,并学会了如何利用定时器进行时间控制。
实验三:模拟信号采集在本实验中,我使用MSP430的模拟信号输入引脚和模数转换模块,成功地将外部的模拟信号转换为数字信号。
通过配置ADC模块的采样速率和精度,我实现了对模拟信号的准确采集,并将采集到的数据通过串口输出。
这个实验让我对MSP430的模拟信号处理有了更深入的了解。
实验四:通信接口应用在本实验中,我使用MSP430的串口通信模块,实现了与外部设备的数据传输。
通过配置串口的波特率和数据格式,我成功地实现了与计算机的串口通信,并通过串口发送和接收数据。
这个实验让我掌握了MSP430与外部设备进行数据交互的方法。
结论:通过一系列的实验,我对MSP430的基本功能和应用有了更深入的了解。
MSP430作为一款低功耗、高性能的微控制器,具备丰富的外设和强大的处理能力,适用于各种嵌入式系统的开发。
通过学习和实践,我掌握了MSP430的GPIO控制、定时器应用、模拟信号采集和通信接口应用等基本技能,为以后的嵌入式系统开发打下了坚实的基础。
未来展望:MSP430作为一款成熟的微控制器,具备广阔的应用前景。
大学实习报告-msp430 (ADand定时器)
湖南大学本科生实习报告实习题目:MSP430单片机实习时间:2011.7.15---2011.7.24 专业:班级:学生姓名:指导教师:目录第1章调试平台-----------------------------------------------------------------------3 1.1 简介------------------------------------------------------------------------------3 1.2 下载指令------------------------------------------------------------------------3 1.3程序调试指令-------------------------------------------------------------------3 1.4 各种设置------------------------------------------------------------------------4第2章实验内容----------------------------------------------------------------------4 2.1 内容简介------------------------------------------------------------------------4 2.2 定时器时钟---------------------------------------------------------------------42.2.1 基本功能介绍--------------------------------------------------------------42.2.2 总体方案介绍--------------------------------------------------------------42.2.3 定时器时钟硬件图-------------------------------------------------------42.2.3.1 独立式键盘-----------------------------------------------------------42.2.3.2 LED显示模块-----------------------------------------------------52.2.3.3LCD显示模块----------------------------------------------------52.2.4 软件系统设计---------------------------------------------------------------62.2.4.1 主流程图----------------------------------------------------------------62.2.4.2 扫描函数流程图-------------------------------------------------------72.3 测试结果------------------------------------------------------------------------72.4 总结------------------------------------------------------------------------------73.1 ADC12----------------------------------------------------------------------------73.1.1基本功能介绍----------------------------------------------------------------73.1.2总体方案介绍----------------------------------------------------------------83.1.3 AD微处理器片内温度测量硬件图--------------------------------------83.1.3.1 MSP430芯片AD通道------------------------------------------------83.1.3.2 AD电压检测-滑动变阻器--------------------------------------------93.1.3.3 LCD模块--------------------------------------------------------------93.3.3.4 LED模块----------------------------------------------------------------93.1.4软件系统设计----------------------------------------------------------------103.1.4.1 程序流程图-------------------------------------------------------------103.1.5 测试结果---------------------------------------------------------------------103.1.6 总结---------------------------------------------------------------------------10 附录1---------------------------------------------------------------------------------------10 附录2---------------------------------------------------------------------------------------16第1章调试平台1 IAR调试平台1.1简介:IARsystems 是全球领先的嵌入式系统开发工具和服务的供应商,本次实验所用的IAREW430就是其产品之一。
单片机MSP430实验报告

实验二一、示例:按S1,LED1改变状态#include <msp430f5529.h>void Delay(void) //延迟子程序{int i;for(i = 100;i--;i > 0) ;//延时一点时间}void main(void){WDTCTL = WDTPW + WDTHOLD; // 停止看门狗P1DIR=0x7f;//P1DIR,置1为输出,置0为输入。
0x7f=0111 1111,p1.7为输入,p1.0~p1.6为输出P1REN |= BIT7;//P1.7开启上拉电阻。
|= 为与或,BIT7为1000 0000,P1.7的REN置1,开启端口拉电阻。
P1OUT=0xff; //P1输出高电平。
注意:while (1){if ((P1IN & BIT7)==0)//按键S1被按下。
&位与,若S1按下,P1.7=0,位与操作后,P1IN&BIT7=0x00 {void Delay(void);if (!(P1IN & BIT7)) //按键S1被按下.!(P1IN & BIT7)等同(P1IN & BIT7)==0 {while(!(P1IN & BIT7)); //按键S1被松开P1OUT ^= 0x01; //P1.0输出状态翻转}}}}二、上机自编程序的要求:按下按键S1,控制LED1的亮和灭。
短按键,则小灯亮1秒,然后灭;长按键,小灯常亮。
//********************************************************************* *********// MSP430F552x Demo - Timer0_A5, Toggle P1.0, CCR0 Up Mode ISR, DCO SMCLK //// Description: Toggle P1.0 using software and TA_1 ISR. Timer1_A is// configured for up mode, thus the timer overflows when TAR counts// to CCR0. In this example, CCR0 is loaded with 50000.// ACLK = n/a, MCLK = SMCLK = TACLK = default DCO ~1.045MHz//// MSP430F552x// ---------------// /|\| |// | | |// --|RST |// | |// | P1.0|-->LED//// Bhargavi Nisarga// Texas Instruments Inc.// April 2009// Built with CCSv4 and IAR Embedded Workbench Version: 4.21//********************************************************************* #include<msp430f5529.h>unsigned int h,i;void Delay(void) //延迟子程序{int i;for(i = 100;i--;i > 0) ;//延时一点时间}void main(void){WDTCTL = WDTPW + WDTHOLD; // Stop WDTP1DIR=0x7f;//P1DIR,置1为输出,置0为输入。
MSP430F5529制作的施工车辆信息监测系统.doc
MSP430F5529制作的施工车辆信息监测系统一,功能介绍:本系统主要用于监测施工车辆运行的速度,运行时路面的温度以及车辆的位置信息。
然后将这些这些信息借助移动的网络发送到服务器上去并将温度,速度,时间信息通过显示屏进行显示。
系统的控制核心选用的是TI的msp430F5529,考虑到整个系统用到的IO管脚比较多,所以选用了该款430。
一下是整个系统的方案选型:(1)测速系统采用的霍尔器件,430单片机对霍尔器件输出的脉冲进行输入捕获对其频率进行测量就可计算出车辆的速度;(2)测量车辆运行的路面温度系统我采用的是红外测温温度传感器,430通过smBUS总线方式读取温度传感器的数据,然后进行数据处理,显示在LCD屏上。
(3)计时系统我选用了的是DS1302时钟芯片,外加上一个3v的纽扣电池起到掉电时间保护左右,然后430负责读取时间进行显示。
(4)车辆定位系统我选用的GPS模块,430通过GPS读取到车辆的经纬度信息。
(5)数据发送装置我采用的GPRS模块将采集到速度,温度,时间,位置信息发送到我们自己建立的服务器上去(6)LCD屏,我选用的是240*128的LCD屏,这样尺寸的屏刚好满足我设计的要求。
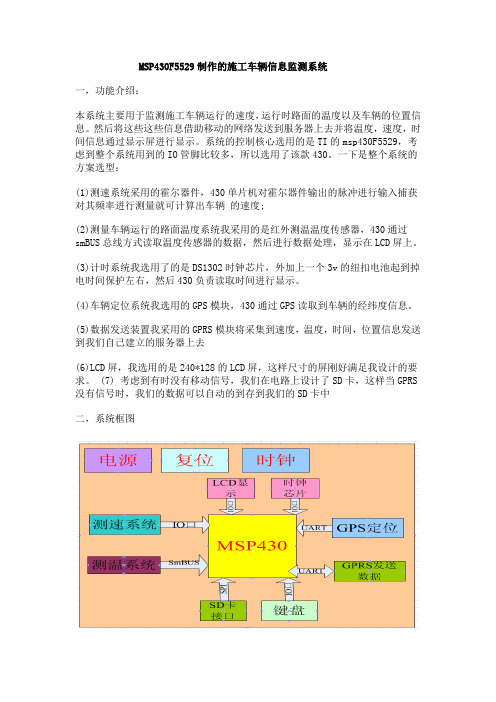
(7) 考虑到有时没有移动信号,我们在电路上设计了SD卡,这样当GPRS 没有信号时,我们的数据可以自动的到存到我们的SD卡中二,系统框图上图就是我整个设计的框图。
(1)电源给整个系统供电,输入12v通过两种稳压芯片,分别稳压到5v和3.3v 给整个系统供电。
(2)测速,键盘, LCD我采用的都是IO进行和430单片机进行连接(3)GPS和GPRS采用的是UART和430进行连接(4) SD卡采用的是SPI接口和430进行连接三,系统原理图图2 电源图3 LCD和时钟芯片图4 430核心部分整个系统的原理图如图2,3,4所示。
图2是整个系统的电源部分,图3是lcd 显示屏,图4是整个430核心部分。
电子科技大学MSP430f5529开发板的独立按键及显示屏标准实验报告
电子科技大学实验报告学生姓名:学号:指导教师:邮箱:一、实验室名称:MSP430单片机实验室二、实验项目名称:使用MSP430f5529开发板的独立按键及显示屏三、实验原理:(1)通用功能I/OGPIO基本都是用于芯片与片外器件或设备的交互。
其作用包括:●检测数字输入,如键盘或开关信号;●驱动LED,蜂鸣器或LCD等其他指示器;●控制片外器件,较高级的使用可以用它们(通过程序)模拟很多器件的时序达到控制相应器件的目的,比如模拟SPI和模拟总线等;GPIO是MCU与外界交互的重要途径,它具有如下的特性:●可以独立控制每个GPIO口的方向(输入/输出模式);●可以独立设置每个GPIO的输出状态(高/低电平);●所有GPIO口在复位后都有个默认方向(或输入或输出)GPIO口都是按组规划,有的芯片是8个GPIO口一组,有的是16个或32个为一组。
一般每个GPIO口都需要做两个寄存器位:一是选择口线方向(输入输出)二是需要一个数据位(用于设置输出数据和读取输入数据)。
所以一组GPIO 口至少会有两个寄存器GPIOxDIR和GPIOxDATA。
如图1.1所示的GPIO口各模块构成。
GPIOxDIR:控制各个GPIO口的方向;GPIOxDATA:用于各个GPIO口的输入输出数据。
图1.1 GPIO口各模块构成MSP430各种端口有大量的控制寄存器供用户操作。
最大限度提供了输入/输出的灵活性。
其特点如下:●每个I/O口都可以独立编程●输入或输出可任意组合●P1和P2所有I/O口都具有边沿可选的输入中断功能●可以按字节输入输出,也可按位进行操作●可设置I/O口的上拉或下拉功能●可配置I/O驱动能力(高驱动强度或低驱动强度)MSP430端口的控制寄存器包括:(a)xDIR输入/输出方向寄存器相互独立的8位分别定义了8个引脚的输入/输出方向。
使用输入和输出功能时,应该先定义端口的方向。
PxDIR配置:Bit = 1: 将端口引脚设置为输出模式;Bit = 0: 将端口引脚设置为输入模式。
标准实验四MSP430F5529_PWM信号发生及测量

电子科技大学实验报告学生姓名:学号:指导教师:邮箱:一、实验室名称:MSP430单片机实验室二、实验项目名称:PWM波发生器及PWM波占空比测量三、实验原理:(1)PWM信号的产生PWM信号是一种具有固定周期不定占空比的数字信号,如下图4-1所示:图4-1 PWM信号波形如果Timer_A定时器的计数器工作在增计数方式,输出采用输出模式7(复位/置位模式),则可利用寄存器TAxCCR0控制PWM波形的周期,用某个寄存器TAxCCRx控制占空比。
这样Timer_A就可以产生出任意占空比的PWM波形。
如图4-2所示。
图4-2 利用Timer_A产生任意占空比的PWM信号可以随时间变化任意改变PWM信号的占空比,具体做法:保持CCR0值(周期不变),而改变CCRx值(改变占空比)。
如图4-3所示。
图4-3 通过配置CCR0和CCRx值调整PWM信号的占空比PWM不需要修改占空比和时间时,CPU在做完Timer_A初始化工作之后,Timer_A就能自动输出PWM,而不需利用中断维持PWM输出,此时CPU就可以进入低功耗状态。
(2)捕获/比较器Timer_A有多个相同的捕获/比较模块,为实时处理提供灵活的手段,每个模块都可用于捕获事件发生的时间或产生定时间隔。
通过TACCTLx中的CAP位选择模式,该模块既可用于捕获模式,也可用于比较模式。
当发生捕获事件或定时时间到都将引起中断。
捕获/比较模块的结构如图4-4所示。
图4-4 捕获/比较模块的逻辑结构捕获模式当TACCTLx中的CAP = 1,该模块工作在捕获模式。
每个捕获/比较寄存器可以用来记录时间事件,例如:▲测量软件程序所用时间▲测量硬件事件之间的时间▲测量系统频率用CM1和CM0 位选择捕获条件,可以选择禁止捕获、上升沿捕获、下降沿捕获或者上升沿下降沿都捕获。
当捕获完成后,定时器的值被复制到TAxCCRn 寄存器,并且中断标志CCIFG 置位。
如果总的中断允许位GIE允许,相应的中断允许位CCIE也允许,则将产生中断请求。
MSP430F5529实验指导书(V1.0)
MSP430F5529 实验指导书(V1.0)2014年10月27日东北林业大学机电工程学院“3+1”实验室实验一基础GPIO实验1、熟悉2、掌握3、掌握1、2、PC【实验原理】CCS(Code Composer Studio)是 TI 公司研发的一款具有环境配置、源文件编辑、程序调试、跟踪和分析等功能的集成开发环境,能够帮助用户在一个软件环境下完成编辑、编译、链接、调试和数据分析等工作。
CCSv5.1 为 CCS 软件的最新版本,功能更强大、性能更稳定、可用性更高,是 MSP430 软件开发的理想工具。
SEED-EXP430F5529v1.0开发板上的有8个可操作的LED灯,与MCU的IO口对应关系如图1-1所示:图1-1 LED与MCU的IO对应关系电路我们可以通过控制单片机IO口的输出电平状态来控制各个LED灯的亮灭。
开发板上还有2个可操作的按键S1,S2。
如图1-2所示。
图1-2 按键电路我们可以通过读取与按键相连的IO口的输入电平状态来执行相应的操作。
此外,S1,S2还可以作为外部中断源,触发中断。
【实验内容】1、用调用头文件的方法,使能MSP430F5529开发板上的8个LED灯依次按顺序循环点亮;2、用按键S1控制开发板上LED1的亮灭状态(查询法);3、用按键S2控制开发板上跑马灯的循环速度(中断方式)。
【实验步骤】family,Finish。
__delay_cycles(500000); //延时P8OUT &= ~BIT2;for(i=BIT1;i<=BIT5; i=i<<1){P1OUT = i;__delay_cycles(500000); //延时}}}6、保存程序后Bulid(单击菜单中,或快捷键Ctrl+B)编译程序。
7、调试程序(单击菜单中)自动进入调试界面并下载程序。
8、运行程序(单击菜单中)进行程序的运行、暂停、停止、单步运行等操作。
标准实验三MSP430F5529_传感器实验

电子科技大学实验报告学生姓名:学号:指导教师:邮箱:一、实验室名称:MSP430单片机实验室二、实验项目名称:基于I2C接口的数据采集三、实验原理:(1)I2C接口简介IIC(Inter-Integrated Circuit,常被称为I2C)总线是一种由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备。
它是由数据线SDA和时钟SCL构成的串行总线,可发送和接收数据。
在CPU与被控IC之间、IC与IC之间进行双向传送,高速I2C总线一般可达400kbps以上。
I2C总线在传送数据过程中共有三种类型信号,它们分别是:开始信号、结束信号和应答信号。
●开始信号:SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。
●结束信号:SCL为高电平时,SDA由低电平向高电平跳变,结束传送数据。
●应答信号:接收数据的IC在接收到8bit数据后,向发送数据的IC发出特定的低电平脉冲,表示已收到数据。
CPU向受控单元发出一个信号后,等待受控单元发出一个应答信号,CPU接收到应答信号后,根据实际情况作出是否继续传递信号的判断。
若未收到应答信号,由判断为受控单元出现故障。
这些信号中,起始信号是必需的,结束信号和应答信号,都可以不要。
I2C总线时序图如图3.1所示:图3.1 I2C总线时序图在MSP430系列单片机中,硬件I2C接口是通过通用串行通信接口(universalserialcommunicationinterface,USCI)来实现的,通用串行通信接口在一套硬件模块上支持多种串行通信模式,例如SPI接口、I2C接口、UART接口等。
配置通用串行通信接口的工作模式是通过为一系列寄存器赋值来实现的,接下来将介绍将通用串行通信接口配置为I2C模式涉及的一系列寄存器。
(2)MSP430F5529中的I2C接口MSP430F5529中USCI(Universal Serial Communication Interface)模块可提供多种串行通信模式。
《基于MSP430F5529的多功能电子》实验报告
基于MSP430F5529的多功能电子琴章仕波1 吴晓庆2(1.杭州电子科技大学,通信工程卓越工程师计划 11081522;2.杭州电子科技大学,通信工程卓越工程师计划 11081428)摘要:本电子琴以MSP430为核心,用MSP430的launchpad为开发工具和以CCS5.1为开发环境,以YF017语言芯片控制喇叭发声,用MSP430的比较器实现电容按键作为琴键,液晶屏LCD5110显示菜单,6个按键开关操作菜单。
系统特色:1)声音与钢琴相似度高;2)人机交互良好,可以进行功能选择;3)有自由模式,能自由演奏曲子;4)试听模式,能欣赏多首曲子;5)学习模式,可以根据屏幕的提示学习演奏曲子。
关键词:电容按键、多功能0引言依据《单片机与嵌入式系统课程设计Ⅰ》以及指导老师要求,在一块型号为MSP430F5529的单片机板子上完成创意型的设计。
通过我们的头脑风暴和各类资料搜集,我们决定设计一个多功能的电子琴。
1设计想法实现电子琴的基本功能—演奏,为提高人机交互性,加入LCD屏幕能显示菜单;同时为了提高电子琴的功能性,加入欣赏功能、学习功能。
为了使琴键更加舒适,采用了当前流行的触摸按键实现。
2功能实现硬件部分分成发声部分、LCD显示部分、菜单按键部分、电容触摸琴键部分、MCU控制部分(采用现成的MSP430F5529的launchpad)。
2.1 发声部分:方案一:采用蜂鸣器发声,通过单片机IO口输出频率可由软件控制的PWM波。
主要优点是电路简单,成本低,可靠性好,占用单片机的引脚数少。
缺点是因为是PWM波驱动蜂鸣器的,所以声音没有钢琴的音色,声音不够悦耳。
要通过单片机的计时器实现PWM波。
方案二:采用语音芯片控制喇叭,实现动听的钢琴声。
主要优点是声音动听、音调准确、编程简单。
缺点是成本比方案一高,占用单片机IO口多,对声音的控制只能通过语音芯片来控制,控制响应速度、声音音域、声音延时等收到语音芯片的性能限制。
MSP430单片机定时器实验报告

实验四定时器实验实验目的:MPS430F5529片内集成的定时器A的使用,学习计数器的补捕获比较模块的使用。
实验内容:定时器采用辅助时钟ACLK作为计数脉冲,fACLK=32768Hz,实现以下功能:1.定时器TA0延时1s,点亮或熄灭LED6,即灯亮1s灭1s,如此循环,采用中断服务程序实现。
2.定时器TA0延时1s,点亮或熄灭LED4,采用捕获比较器CCR0的比较模式,设定输出方式,输出方波,不用中断服务程序3.采用捕获比较器CCR1的比较模式LED5,设定输出方式,输出PWM波形,使LED 亮2s,灭1s。
4.用定时器实现30s倒计时,在液晶模块上显示,每过一秒显示数字变化一次。
5.使用TA1的捕获比较器CCR0捕获按键的间隔时间,在液晶模块上显示。
程序代码:程序1:#include <msp430f5529.h>void main(){WDTCTL = WDTPW + WDTHOLD; //关看门狗P1DIR |= BIT3; //设置P1.0口方向为输出。
TA0CCTL0 = CCIE; //设置捕获/比较控制寄存器中CCIE位为1,//CCR0捕获/比较功能中断为允许。
TA0CCR0 = 32767; //捕获/比较控制寄存器CCR0初值为32767TA0CTL = TASSEL_1 + MC_1+TACLR; //设置定时器A控制寄存器TACTL,//使时钟源选择为SMCLK辅助时钟。
//进入低功耗模式LPM0和开总中断_BIS_SR(LPM0_bits +GIE);}//定时器A 中断服务程序区#pragma vector=TIMER0_A0_VECTOR__interrupt void Timer_A (void){P1OUT ^= BIT3; //P1.0取反输出}实验现象:实验开始后,实验板上LED6亮灭闪烁,间隔为1s。
程序2:#include <msp430f5529.h>void main(void){WDTCTL = WDTPW + WDTHOLD; // 关狗P1DIR |= BIT1; // P1.1 设置为输出P1SEL |= BIT1; // P1.1 输出使能TA0CCR0 = 60000; // PWM PeriodTA0CCTL0 = OUTMOD_4; // CCR1 模式4TA0CCR1 = 30000; // CCR1 PWM duty cycleTA0CTL = TASSEL_1 + MC_1 + TACLR; // ACLK, up mode, clear TAR__bis_SR_register(LPM3_bits); // Enter LPM3__no_operation(); // For debugger}实验现象:实验开始后,实验板上LED4亮灭闪烁,间隔为1s。
MSP430F5529实验指导书(V1.0)
MSP430F5529 实验指导书(V1.0)2014年10月27日东北林业大学机电工程学院“3+1”实验室实验一基础GPIO实验实验二键盘与液晶显示实验实验三时钟系统配置实验实验四看门狗与定时器实验实验五 AD/DA实验实验六比较器实验实验七 Flash实验实验八串行通信实验实验一基础GPIO实验【实验目的】1、熟悉CCS的基本使用方法;2、掌握MSP430系列单片机程序开发的基本步骤;3、掌握MSP430 IO口的基本功能。
【实验仪器】1、SEED-EXP430F5529v1.0开发板一套;2、PC机操作系统Windows XP或Windows 7,CCSv5.1集成开发环境。
【实验原理】CCS(Code Composer Studio)是 TI 公司研发的一款具有环境配置、源文件编辑、程序调试、跟踪和分析等功能的集成开发环境,能够帮助用户在一个软件环境下完成编辑、编译、链接、调试和数据分析等工作。
CCSv5.1 为 CCS 软件的最新版本,功能更强大、性能更稳定、可用性更高,是 MSP430 软件开发的理想工具。
SEED-EXP430F5529v1.0开发板上的有8个可操作的LED灯,与MCU的IO口对应关系如图1-1所示:图1-1 LED与MCU的IO对应关系电路我们可以通过控制单片机IO口的输出电平状态来控制各个LED灯的亮灭。
开发板上还有2个可操作的按键S1,S2。
如图1-2所示。
图1-2 按键电路我们可以通过读取与按键相连的IO口的输入电平状态来执行相应的操作。
此外,S1,S2还可以作为外部中断源,触发中断。
【实验内容】1、用调用头文件的方法,使能MSP430F5529开发板上的8个LED灯依次按顺序循环点亮;2、用按键S1控制开发板上LED1的亮灭状态(查询法);3、用按键S2控制开发板上跑马灯的循环速度(中断方式)。
【实验步骤】内容1:使能开发板上的8个LED灯依次按顺序循环点亮1、打开CCSv5并确定工作区间,然后选择File-->New-->CCS Project 弹出图1-3对话框。
学习笔记-CCS-MSP430F5529[快速入门篇二]
![学习笔记-CCS-MSP430F5529[快速入门篇二]](https://img.taocdn.com/s3/m/73b6b92282c4bb4cf7ec4afe04a1b0717fd5b37b.png)
学习笔记-CCS-MSP430F5529[快速⼊门篇⼆] 由于2021的全国电赛延期了,从今天开始打算好好整理⼀下使⽤CCS编程的经验,本篇笔记会好好整理⼀下我备赛期间⽤CCS写的程序,包括外部中断,定时器部分的定时中断,定时器输⼊捕获,PWM波输出,UART,OLED(IIC),MPU6050,内容涵盖了硬件和软件部分。
鉴于笔者⽔平有限和能⼒不⾜,⽂中有不到之处还请看者多包涵,我的⼯程源代码链接会在⽂章末尾贴出。
先贴⼀张peripheral图,MSP430的外部引脚及其复⽤功能都可在图⾥查到。
⼀·外部中断 外部中断的操作⽅式与GPIO⼀样是使⽤寄存器操作,所以学习相关的寄存器是不可避免的,不过MSP430的寄存器不算太多,操作外部中断主要要⽤到以下寄存器:1.PxIV 中断向量表(字),P1端⼝的中断函数⼊⼝地址应该都放在⾥⾯,只是⼀个地址;2.PxIE 中断使能寄存器,相应引脚位置1表⽰允许产⽣中断;置0表⽰该引脚不产⽣中断;3.PxIES 中断触发⽅式选择寄存器,相应引脚位置1表⽰下降沿触发,置0表⽰上升沿触发;4.PxIFG 中断标志,由于MSP430的中断使能需要使能总中断,所以仅当总中断GIE和中断使能寄存器PxIE都打开后,PxIFG⾼电平表⽰有中断请求等待待响应,等中断服务函数结束时需要软件清该标志位; 这些寄存器在TI的msp430f5xx_6xxgeneric.h头⽂件有如下定义下⾯看⼀个外部中断程序,所⽤引脚为P2.1,对应MSP430F5529⽕箭板的板载按键S1,初始化为下降沿触发void EXTI_Init(){/*按键中断*/P2IE |= BIT1; //P2.1中断使能P2IES |= BIT1; //设置为下降沿触P2IFG &= ~BIT1; //清中断标志位P2REN |= BIT1; //上拉电阻P2OUT |= BIT1; //初始化置⾼}/*中断服务函数*/#pragma vector=PORT2_VECTOR__interrupt void P2_ISR(void){if(P2IFG & BIT1){delay(2); //延时2ms消抖动/*这⾥是函数算法部分*/}P2IFG &=~BIT1; //清空中断标志}⼆·定时器MSP430的定时器资源还算丰富,共有两类共四个定时器,分别是3个TimerA和1TimerB,由于我对TimerA使⽤较多,所以本⽂着重来讲TimerA,三个TimerA分别为Timer0_A(5个捕获/⽐较寄存器),Timer1_A(3个捕获/⽐较寄存器),Timer2_A(3个捕获/⽐较寄存器),下⾯是TimerA的结构图我们结合TimerA的寄存器讲解⼀下这张图上半部分是整个定时器的基础,整个上半部分可通过TACTL控制寄存器来编程,从功能⾓度来讲从左往右分别是,⾃⾝时钟源配置TASSEL,第⼀次分频选择ID,定时器清零位TACLR,计数值存放寄存器TAR,⼯作模式控制位MC,中断标志位TAIFG以及没有在结构图出现的定时器中断使能TAIE。
msp-430课程大作业实践报告

简易自行车速度计设计报告班级:二班姓名:王根胜学号: 02121187一、摘要该设计使用超低功耗MSP430单片机为控制处理器,并结合简单的硬件电路来实现自行车测速。
在自行车前轮上装有一个干簧管和一个磁铁,随着车轮每转一圈磁铁铁划过干簧管,都会吸合干簧管而接通电路,输出一个低电平脉冲信号,通过单片机计时器记录两次中断时间间隔,通过软件处理最终实现测速。
二、硬件设计自行车测速系统以MSP430单片机为处理器,通过安装在自行车前轮上的硬件系统产生周期性脉冲信号(即产生低电平信号),单片机对信号采集并计时(发生中断并记录两次中断的时间间隔),通过软件计算得到自行车的实时速度(用自行车轮周长除以周期即可的到速度),并在LCD上显示。
具体设计流程如图:图1-1 硬件设计流程图三、软件设计这个程序使用MSP430单片机的定时器来测量硬件信号的周期,给定时器设置溢出周期,通过软件计算定时器的溢出次数来测量信号的周期,进而测出自行车的行进速度。
1、主程序主程序主要包括各部件的初始化,定时器TimerA中断,I/O中断的定义等。
WDTCTL = WDTPW + WDTHOLD;TACTL=TASSEL_1+MC_2+TAIE+TACLR;//TA 清零并开始计时,ACLK,开中断LPM3;//进入低功耗模式三休眠,全部程序在中断内执行2、 数据处理子程序Period=TA_OverflowCnt*65536+TAR;//得到相邻两次中断之间相隔的时间Speed=(long)32768*Circle*36/(10*Period);//计算速度(km/h ),保留2位小数如以下程序图(图1-2)所示:3、 LCD 显示子程序void LCD_DisplayDigit(char Digit,char Location) void LCD_DisplayLetter(char Letter,char Location)void LCD_DisplayNum(unsigned int Number,charStartLocation)图1-2 数据处理子程序流程图图1-3 LCD 子程序设计流程图void LCD_DisplayDecimal(int Number,char DOT,charStartLocation)LCD_DispalyDecimal(Speed,2)如图所示设计程序:见图1-3四、测试结果对于程序的编译和调试都较为较为成功。
基于MSP430F5529主控芯片的可寻轨小车

基于MSP430F5529主控芯片的可寻轨小车发布时间:2021-06-30T02:50:02.693Z 来源:《现代电信科技》2021年第4期作者:孙婉怡1 牛建邦1 席莹莹1 孙婉欣2 [导读] 可寻轨小车用MSP430F5529最小系统、红外反射传感器、电机驱动模块、电机以及电池组成。
MSP430F5529最小系统为该系统的核心器件,为了使小车正常行驶,系统外设增加电机以及电机驱动模块,同时为了使小车能够正常稳定行驶,增加了PID算法。
(1.佳木斯大学信息电子技术学院黑龙江佳木斯 154007;2.哈尔滨商业大学药学院黑龙江哈尔滨 150000)摘要:可寻轨小车由MSP430F5529最小系统、红外反射传感器、电机驱动模块、等组成。
以MSP430F5529最小系统为该系统的核心器件,并使用PID算法对速度进行了调控。
应用红外传感器对轨道进行检测,实现小车的直线行驶和转弯等功能。
小车启动后主控器发出直线行驶信号,使小车直线行驶,当红外传感器发生偏转时对其进行调整。
关键词:MSP430F5529最小系统;红外反射传感器;PID算法Design of trackable car based on msp430F55291.College of Information Science & Electronic Technique,Jiamusi University2. Pharmacy,Harbin University of CommerceAbstract:The trackable trolley is composed of msp430f5529 minimum system,infrared reflection sensor,motor drive module,etc. Msp430f5529 chip is used as the core device of the system,and PID algorithm is used to control the speed. The infrared sensor is used to detect the track and realize the functions of straight-line driving and turning of the car. After the car starts,the main controller sends out a straight-line driving signal to make the car drive in a straight line. When the infrared sensor deflects,it is adjusted.Keywords:Msp430f5529 chip Infrared reflection sensing PID algorithm引言可寻轨小车用MSP430F5529最小系统、红外反射传感器、电机驱动模块、电机以及电池组成。
衡星MSP430F5529大作业报告

中国地质大学(北京)本科课程报告《电子电路设计与实践》学生姓名衡星院(系)地球物理与信息技术学院专业测控技术与仪器学号10101522132018 年3 月19 日中国地质大学(北京)第一章程序框图说明:(1)“文字说明”的具体内容为:“当前A0~A7循环采集,串口发送a/b/c/d实现PWM 转换。
按键P2.1通道转换,按键P1.1实现A0~A7通道循环采集。
”(2)占空比不同的PWM波由P3.6通道输出。
(3)按键P2.1按x下后,“Ax通道循环采集并显示”,其中x取值1~8。
当x>8时,x=x%8。
(4)所有显示均在串口助手窗口显示,串口波特率设置为115200。
课堂程序编写过程:3月6日(周二):王猛老师在课堂上讲解大作业要求。
3月8日(周四):分发MSP430F5529单片机,并学习GPIO相关程序编写。
3月10日(周六):学习定时计数器、时钟功能,并完成“呼吸灯”和“时钟分频”等课堂函数编写。
3月15日(周四):学习中断、串口和ADC采集功能,完成“中断服务”等课堂函数编写。
3月17日(周六):完成“串口显示”和“测温环节”等课堂函数编写。
大作业程序编写过程:3月17日(周六)15:00~16:00:仔细阅读《MSP单片机-验收标准》和相关PPT,确定整个程序的功能框图。
3月17日(周六)16:00~18:00:通过串口中断函数完成PWM波形输出与串口指令的连接功能,并通过串口调试助手验证了程序的准确性。
3月18日(周日)9:00~11:00:通过按键中断函数完成ADC八路循环采集和单路选择采集的切换功能,并通过串口中断函数将采集的数据输出,在串口调试助手页面进行了验证。
3月18日(周日)14:00~15:00:通过按键中断添加LED1与LED2的闪烁功能,为整个实验程序增添创意。
3月18日(周日)15:30~16:00:与钮学长就《MSP单片机验收标准》交换了意见。
3月18日(周日)19:00~21:00:完成《电子电路设计与实践》课程报告程序框图。
基于MSP430F5529的循迹壁障无线控制智能小车报告
华中科技大学电子与信息工程系2013年TI杯电子设计大赛项目总结报告项目名称:基于MSP430的智能小车设计团队成员:竺浩通信工程1006班邱双通信工程1006班郑学谦通信工程1006班指导教师: 汪小燕2013 年7 月 3 日课题名称:智能小车自动控制系统【摘要】本次课程设计以MSP430超低功耗单片机系列MSP430F5529为主控制器,附加电机、电池、传感控制模块等,完成二驱小车自由运动、检测黑白线实现沿轨道自动运行、能够避开障碍物、无线控制等功能,F5529的I/O口丰富,使得各个功能模块之间信息交流快捷方便。
在机械结构上,我们选购用一个万用轮代替两个前轮的小车,大幅度提高了小车的灵敏度。
利用单片机产生PWM波,控制小车速度,选用L298N驱动芯片驱动电路,使用三路红外对接管检测黑白线,使用一个超声波实现测距壁障功能,使小车能够自动左转避开障碍物,使用无线控制模块,可实时控制小车运动。
基于可靠的硬件设计和更加优化的软件算法,在实现本课设基本要求的基础上,可实现部分扩展功能。
【关键词】:MSP430F5529 循迹无线控制超声波测距壁障Abstract This curriculum project uses MSP430F5529, in the series of MSP430 ultra low power single chip microcomputer, as its main controller. In addition, the realization of the controller’s function can not leave motor, battery, sensing control template and so on, for example, free movement of the two drive vehicle, and automatic operation along runway by testing black and white lines, avoiding obstacles, wireless operation and other functions. The quick and easy information exchanging among each functional template has to thank to the abundance of I/O of F5529. On mechanical structure, two front wheels of the mini car are replaced by a universal wheel, so as to improve its sensitivity by large margin. PWM is used to control motor and single chip microcomputer to make PWM wave, in order to control its speed. The car can stop and turn left to avoid obstacles because L298N driving chip drives circuit, three infrared ray on pipes is used to test black and white lines, and an ultrasonic template is chosen to realize ranging barrier function. With wireless operating template, movement of the mini car can reach real-time control. Besides finishing basic requirement of this curriculum project, some broadening functions can also be achieved based on reliable hardware design and better software algorithm.Key words: MSP430F5529 tracking wireless control ultrasonic wave rangingcounterguard目录1 概述 (3)2 设计目标 (3)3 团队组成与任务分工 (4)4 方案论证 (4)4.1 电机驱动模块 (4)4.2 循迹模块 (5)4.3 无线模块 (5)4.4 测距壁障模块 (5)5 系统总体设计 (7)5.1 总体设计思路 (7)5.2 主要器件选择 (7)5.3 主要元器件清单 (8)7 系统各模块设计与实现 (15)7.1 电机驱动模块 (15)7.2 循迹模块 (16)7.3 无线模块 (16)7.4 超声波测距壁障模块 (17)9 心得与总结 (26)10 致谢 (27)11 参考文献 (27)12 附录 (27)1.概述随着控制技术及计算机技术的发展,智能车系统将在未来工业生产和日常生活中扮演重要的角色。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国地质大学(北京)本科课程报告《电子电路设计与实践》
学生姓名衡星
院(系)地球物理与信息技术学院
专业测控技术与仪器
学号1010152213
2018 年3 月19 日
中国地质大学(北京)
第一章程序框图
说明:
(1)“文字说明”的具体内容为:“当前A0~A7循环采集,串口发送a/b/c/d实现PWM 转换。
按键P2.1通道转换,按键P1.1实现A0~A7通道循环采集。
”
(2)占空比不同的PWM波由P3.6通道输出。
(3)按键P2.1按x下后,“Ax通道循环采集并显示”,其中x取值1~8。
当x>8时,x=x%8。
(4)所有显示均在串口助手窗口显示,串口波特率设置为115200。
课堂程序编写过程:
3月6日(周二):王猛老师在课堂上讲解大作业要求。
3月8日(周四):分发MSP430F5529单片机,并学习GPIO相关程序编写。
3月10日(周六):学习定时计数器、时钟功能,并完成“呼吸灯”和“时钟分频”等课堂函数编写。
3月15日(周四):学习中断、串口和ADC采集功能,完成“中断服务”等课堂函数编写。
3月17日(周六):完成“串口显示”和“测温环节”等课堂函数编写。
大作业程序编写过程:
3月17日(周六)15:00~16:00:仔细阅读《MSP单片机-验收标准》和相关PPT,确定整个程序的功能框图。
3月17日(周六)16:00~18:00:通过串口中断函数完成PWM波形输出与串口指令的连接功能,并通过串口调试助手验证了程序的准确性。
3月18日(周日)9:00~11:00:通过按键中断函数完成ADC八路循环采集和单路选择采集的切换功能,并通过串口中断函数将采集的数据输出,在串口调试助手页面进行了验证。
3月18日(周日)14:00~15:00:通过按键中断添加LED1与LED2的闪烁功能,为整个实验程序增添创意。
3月18日(周日)15:30~16:00:与钮学长就《MSP单片机验收标准》交换了意见。
3月18日(周日)19:00~21:00:完成《电子电路设计与实践》课程报告程序框图。
3月19日(周一)19:00~21:00:检查大作业程序,完成《电子电路设计与实践》课程报告。
《电子电路设计与实践》课程不知不觉便到了最后,穆然发觉这几周的学习光阴竟是如此短暂。
回首学习《电子电路设计与实践》课程的这几周,可以说艰辛且难忘,却也让我收获满满,它必将给我留下深刻的印迹。
本报告及程序设计的部分(这里未展示出)工作是在王猛老师悉心教导的基础上完成的,从课程的讲解、作业的发布,到程序的完成、论文的撰写都是王老师谆谆教诲的结果。
王老师渊博的学术知识、深厚的专业功底、丰富的实践工作经验、严谨的治学态度和诲人不倦的育人精神都给我留下了极其深刻的印象,使我受益匪浅。
进入大三的我曾一度对未来感到迷茫失措,忧虑自己能否继续“测控技术与仪器”的研究生学习,怀疑自己是否适合“电子器件开发”这个领域。
当我逐渐被负能量吞噬,几近淹没,王老师带着一束光驱散了我的迷惘。
MSP430F5529让我一点一点重拾信心,就像在茫茫的大海上看到了希望。
从最初对MSP430F5529单片机知识完全不了解,到现在可以着手写一些小程序,这种提升离不开老师、学长和同学们的鼎力帮助。
当然最重要的,也离不开自己的钻研。
在完成最后大作业的过程中,我总结出以下几点心得体会:
一是要勇于迈出第一步。
万事开头难,当拿到实验要求时,我被繁琐的内容慌到了,觉得太难无从下手。
后来理清了思路后,一步一步来,一个模块一个模块编写,慢慢变得轻车熟路。
二是要培养自己解决问题的能力。
例如当完成ADC模块与串口功能连接程序后,打开串口助手时却总是输出乱码。
逐条检查代码发现无误后,我便浏览PPT查询问题的原因,并根据自己的理解逐一尝试,最终问题得以解决。
三是不耻下问。
遇到不懂的问题及时询问老师、学长学姐和同学们,借鉴别人的思路,在此基础上创新,效果事半功倍。
最后,再次感谢王猛老师以及在程序设计过程中给予过帮助的学长学姐们,正是你们的友善热情激励我克服在工作学习中遇到的一个又一个困难,使我有信心在人生的旅途中去面对各种挑战。
衡星
2018年3月19日。