用ADAMS进行凸轮机构模拟仿真示例
基于ADAMS尖顶凸轮机构的仿真与分析

2.4.1尖顶从动件直动凸轮机构如图2-1所示为一尖端移动从动件盘形凸轮机构,凸轮1为一半径R=100mm 的偏心圆盘,凸轮的回转中心A到凸轮的几何中心0的距离H=30mm,凸轮匀速转动的角速度 =30d/s。
图2-1 运动简图对上述实例用ADAMS/View模块进行虚拟样机的建模,建模过程如下:1.启动ADAMS软件。
2.创建模型名称:jiandingzhidong。
如图2-2。
3.设计工作环境:在菜单settings中,如图2-3所示,设置单位。
如图2-4所示,设置工作网格。
如图2-5所示设置图标。
然后按F4打开光标位置显示,如图2-6所示。
图2-2 ADAMS/View的启动界面图2-3设置单位图2-4 设置工作网格图2-5 设置图标图 2-6 光标位置显示4.创建凸轮:(1)创建圆曲线:在ADAMS/View零件工具库中,右键点击,然后左键选择circle ,然后在工作区中的(0,0,0)位置,则创建出一个半径为100mm的圆曲线。
(2)如图2-7所示,右击圆曲线弹出快捷菜单选择Circle:CIRCLE_1/Modify 弹出如图2-8所示对话框。
然后将Segment Count更改为50。
图2-7 图2-8(3)点击,选择,然后如图2-9设置参数。
然后单击PART_2,然后再单击PART_2.CIRCLE_1。
然后将构建更名为cam。
图2-95.创建移动从动件。
(1)创建从动件尖端:右击,选择,设置参数如图2-10所示,然后单击(0,120,0)和(0,100,0)两处。
将构建重命名为follower。
(2)创建移动从动件:右击,选择,设置参数如图如图2-11所示,然后单击follower,单击(0,120,0)处,上移光标,当出现圆柱体时单击工作区域,则从动件被创建。
如图2-12所示。
6.创建运动副:单击转动副,创建cam与ground之间的转动副JOINT_A。
单击创建follower与ground之间的移动副JOINT_B。
ADAMS对凸轮连杆的仿真分析

ADAMS对凸轮连杆的仿真分析一实例描述本模型为凸轮滑块机构,有两个构件和三个Maker点构成,其中凸轮Part2是主动件,Part3是从动件,Part3是从动件凸轮,Part2上有样条曲线,在样条曲线和Part3上的一点之间创建点线副。
Part2与大地间创建旋转副,Part3与大地之间创建滑移副,他们共同构成了一个凸轮机构。
二建模仿真建模分析本模型是从Pro/E建模,然后导入到Admas中进行运动学分析。
分析知,本模型结构比较简单,需要用到的零件为凸轮和连杆。
其中,凸轮与大地之间为旋转副连接;凸轮与连杆间为凸轮副连接;连杆与大地间为移动副连接。
对凸轮施加驱动力矩。
物理模型启动ADAMS/view,建立模型如下图所示。
图1 导入Adams后模型创建旋转副。
选择2Bodies-1Loc和Normal to Gird项,然后在图形区单击构件PART2作为第一个件,再在空白区单击鼠标左键,选择大地作为第二个件,再选择groud.MARKE_1的原点,就在PART2和大地之间创建一个旋转副。
选择2Bodies-1loc和Pick Geometry Feature,在图形区单击构件PART3作为第一件,再在空白区单机鼠标左键,选择大地作为第二个件,再选择groud.MARKER_2的原点,拖动鼠标直到出现一个和滑杆方向的箭头便按下鼠标左键,此时就在PART3和大地之间创建一个滑移副。
添加接触单击载荷工具中接触按钮在凸轮和顶杆之间定义接触。
添加驱动在主工具栏中点击旋转驱动按钮,给凸轮添加旋转驱动。
仿真点击仿真按钮,设置仿真终止时间(End Time)为5,仿真工作步长(Step,进行仿真。
Size)为0.01,然后点击开始仿真按钮运动学分析图像如下:X方向位移曲线方向位移曲线方向速度曲线方向速度曲线加速度测量x方向加速度测量曲线动力学分析图像如下:取contact为研究对象:的X方向力曲线的Y方向力曲线的X方向转矩曲线的Y方向转矩曲线三仿真分析偏心轮质心位移速度及加速度的变化曲线,由于是偏心轮,因此偏心轮质心的运动符合正弦规律,从图形中也验证了这一点,可以看出曲线与实际运动吻合。
用ADAMS进行凸轮机构模拟仿真示例

用ADAMS进行凸轮机构模拟仿真示例引言在机械工程领域,凸轮机构是一种常见的机构组成部分,广泛应用于工业生产和制造。
凸轮机构的设计需要考虑到凸轮曲线的形状和运动参数对传动性能的影响。
为了评估和优化凸轮机构的性能,我们可以使用计算机仿真软件进行凸轮机构的模拟仿真。
ADAMS是一款被广泛应用于机械系统仿真的软件工具,本文将通过一个示例来介绍如何使用ADAMS进行凸轮机构的模拟仿真。
凸轮机构概述凸轮机构是一种将轮廓复杂的凸轮运动传递给连杆的机构。
它通常由凸轮、从动件和驱动件构成。
凸轮是核心部分,它的轮廓决定了从动件的运动轨迹。
通过凸轮的运动,从动件可以实现往复、旋转或其他特定的运动方式。
凸轮机构在内燃机、机床、汽车等领域得到广泛应用。
ADAMS概述ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款用于机械系统动力学仿真的软件工具。
它提供了丰富的建模元素,可以快速和准确地建立机械系统的模型,并通过求解动力学方程来模拟机械系统的运动。
ADAMS具有友好的用户界面和强大的计算功能,被广泛应用于机械工程领域的仿真和优化。
凸轮机构模拟仿真示例为了演示如何使用ADAMS进行凸轮机构的模拟仿真,我们将以一个简单的例子来说明。
假设我们要设计一个四连杆机构,其中一根连杆由凸轮驱动。
该凸轮的轮廓为心形曲线,从动件为简单的滑块。
首先,我们需要建立凸轮机构的模型。
在ADAMS中,可以通过创建凸轮、连杆、滑块等元素来建立凸轮机构的模型。
通过定义凸轮的曲线形状和连杆的运动参数,我们可以构建出凸轮机构的模型。
接下来,我们需要定义凸轮机构的运动条件。
在ADAMS中,可以通过设置凸轮的运动方式和频率来定义凸轮机构的运动条件。
根据凸轮的运动,ADAMS可以自动计算连杆的运动轨迹。
然后,我们可以进行凸轮机构的模拟仿真。
在ADAMS中,可以通过启动仿真来模拟凸轮机构的运动。
ADAMS会计算连杆的运动轨迹、速度、加速度等参数,并显示在仿真结果中。
基于ADAMS的凸轮机构设计及运动仿真分析_徐芳

!!!!!!!!!!!!!!"
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!" 【摘 要】 用大型运动学和动力学分析软件 ADAMS 完成尖顶直动从动件盘形凸轮机构设计和 !!!!!!!!!!!!!!"
实体造型 , 并对其进行运动分析和仿真 , 缩短了凸轮的设计周期并提高了设计质量 , 为凸轮机构的设 计分析提供一种有效的新方法。 关键词 : ADAMS ; 凸轮机构 ; 运动仿真 【Abstr act】 The design and modeling of dish cam with straight moving follower is given by the kinetics
转副之上创建一个每秒钟逆时钟旋转 360 度的旋转驱动。 这样 , 一个完整的凸轮机构仿真模型建立起来 , 如图 4 所示 , 从而可以 进行下一步的运动仿真分析。
20* (1 - cos (6/5*360d*time)),40,IF(time - 7/12:40,40,IF (time - 11/12: 40* (2.75 - 3*time +1/(2*pi)*sin (3*2*pi*time - 3.5*pi)),0,IF (time - 1: 0,0,0))))" 。
在模型上施加一定的运动约束副、 力或力矩的运动激仿真实例分析
利用 ADAMS 进行凸轮机构设计仿真的过程大致可分为凸 轮机构几何建模、 施加约束和载荷、 凸轮机构样机模型检验和 仿真结果后处理、 仿真结果比较分析, 多次仿真及优化设计等
2.1 已知条件
已知尖顶直动从动件盘形凸轮机构的凸 轮 基 圆 半 径 r0=60, 从动件行程 h=40, 推程运动角为 !0=150!, 远休止角 !s=60!, 回程运 动 角 !0' =120!, 近 休 止 角 为 !s' =30! ; 从 动 件 推 程 、 回程分别采用余 弦加速度和正弦加速度运动规律, 对该凸轮机构进行模拟仿 真 , 各阶段的运动规律如下 : ( 1) 从动件推程 运 动 方 程 。 推 程 段 采 用 余 弦 加 速 度 运 动 规 律 , 故将已知条件 !0=150!=5!/6 、 h=40mm 代入余弦加 速 度 运 动 规律的推程段方程式中 , 推演得到 :
用ADAMS进行凸轮机构模拟仿真示例

结果分析注意事项
确保模拟仿真的初始条件和参数设 置正确
注意模拟仿真的收敛性和稳定性
添加标题
添加标题
添加标题
添加标题
对比实际测试数据与模拟仿真结果, 确保一致性
考虑模拟仿真的误差和不确定性
THANK YOU
汇报人:XX
参数敏感性分析:研究模型参数对模拟仿真结果的影响,确定关键参数并分析其敏感性。
重复性验证:多次运行模拟仿真并分析结果的重复性,以评估模拟仿真的可靠性和稳定性。
模拟仿真结果优化分析
优化目标:提高凸轮机构的性能和效率
优化方法:采用多目标优化算法,对凸轮机构的关键参数进行优化 优化过程:通过ADAMS软件进行仿真实验,分析不同参数组合下的性能表 现 优化结果:得到最优参数组合,使凸轮机构性能达到最优状态
功能特点:ADAMS提供了丰富的建模工具和求解器,支持各种机械系统,包括刚体、柔性体和 刚柔耦合系统。
应用领域:广泛应用于汽车、航空航天、船舶、机械制造、能源等领域,用于产品设计和性能优 化。
优势:ADAMS提供了直观的图形界面和强大的后处理功能,使得用户可以方便地进行模型建立、 参数设置和结果分析。
对比分析不同 参数下的模拟 仿真结果,如 转速、压力角
等
输出凸轮机构 模拟仿真的最
优设计方案
总结输出凸轮 机构模拟仿真 结果对实际应 用的指导意义
用ADAMS进行凸轮机构模拟 仿真结果分析
模拟仿真结果准确性分析
对比实验:将模拟仿真结果与实际实验数据进行对比,验证模拟仿真的准确性。 误差分析:分析模拟仿真结果与实际实验数据之间的误差,判断误差是否在可接受范围内。
定义运动学参数和约束条件
设置凸轮机构运动参数
确定凸轮机构类型和尺寸 定义凸轮机构运动规律 设置凸轮机构接触参数 验证凸轮机构运动参数的正确性
ADAMS的入门例子凸轮机构的建模
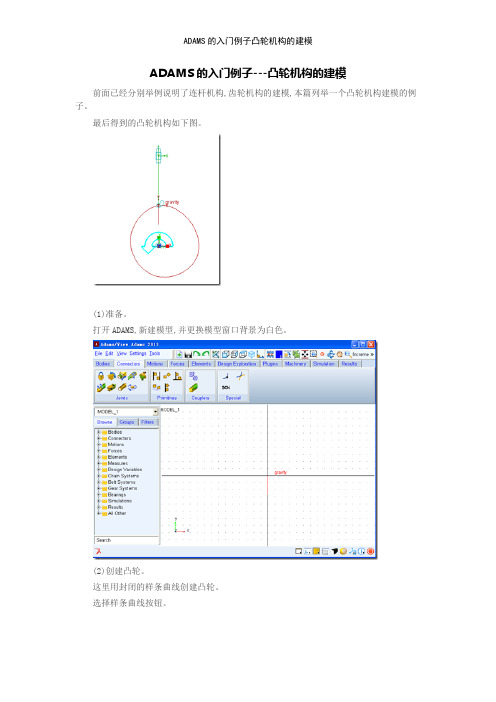
ADAMS的入门例子---凸轮机构的建模前面已经分别举例说明了连杆机构,齿轮机构的建模,本篇列举一个凸轮机构建模的例子。
最后得到的凸轮机构如下图。
(1)准备。
打开ADAMS,新建模型,并更换模型窗口背景为白色。
(2)创建凸轮。
这里用封闭的样条曲线创建凸轮。
选择样条曲线按钮。
注意细节窗口,选中CLOSED、然后在屏幕中点击8个点,形成凸轮的轮廓。
在点到8个点后,右键结束创建。
注意第一个点就是从坐标原点开始的,这样做的目的就是为了方便创建后面的推杆。
(3)创建推杆。
推杆用一根线段来表示。
选择下图所示的按钮,它就是用于创建多条连续线段的。
注意细节视图,选择就是ONE LINE。
就就是说创建一条直线。
然后在模型窗口中从坐标原点向上拉出一条线段,长短任意。
构件创建完毕。
(4)对凸轮与推杆重命名。
为了便于创建下一步的运动副,先修改这两个构件的名字,分别为TULUN,与推杆。
首先修改凸轮的名字。
选中凸轮,右键菜单中选择RENAME、弹出下图的对话框修改如下同理,把推杆的名称也进行修改展开左边的树形窗口的BODIES,可以瞧到名称已经修改为TUIGAN ,TULUN、(5)创建运动副首先就是凸轮与地面之间的转动副。
在下图所示的位置创建凸轮与地面之间的转动副,细节不再赘述。
然后在推杆与地面之间创建移动副。
移动副的位置就在推杆的终点,方向沿着推杆。
接着创建凸轮副。
找到点-线接触的凸轮副按钮如下图先找到推杆上与凸轮接触的点。
在接触出单击右键,弹出选择框。
在里面选择TUIGAN 上的这个点。
然后再选择凸轮上的曲线则凸轮副已经创建。
局部放大凸轮副,形状如下好,运动副创建完毕。
(6)施加驱动。
给凸轮上的转动副施加一个驱动。
过程不再赘述。
(7)运行仿真。
结果如下可见,凸轮机构的创建就是相对比较容易的事情。
基于ADAMS的凸轮机构参数化设计及精度仿真分析

1 凸轮机构的参数化建模
1. 1 凸轮机构的理想模型
凸轮机构的设计主要是对凸轮轮廓曲线的设
计 。凸轮的轮廓曲线取决于从动件运动规律 ,根据
工作要求选定推杆的运动规律 ,乃是凸轮轮廓曲线
设计的前提 。工程上常用的从动件的运动规律主要
有三角函数和多项式 2 大类 ,可根据实际需要进行
选择 ,也可对以上运动规律进项修正或重新设计从
代入式 ( 1) 可得 C0 = C1 = C2 = 0 , C3 = 10 h/δ30 ,
C4 = - 15 h/δ40 , C5 = 6 h/δ50 ,故其位移方程式为 :
S = 10 hδ3 /δ30 - 15 hδ4 /δ40 + 6 hδ5 /δ50
(2)
1. 2 参数化建模
凸轮的参数化建模采用运动表达式参数化和使
个球体 part , 在 cam create 对话框的 Ref Marker
Name 和 Ref Part Name 栏右击鼠标 ,从弹出的快捷
菜单中执行相应的命令 , 可以选取相应的 part 及
marker 点 ;对话框的其它栏中由于在宏命令中有默
认设置 ,所以系统已经显示了默认值 ,选择 O K 按
钮 ,即可生成一个属于该 part 的凸轮 。
推杆的参数化建模同上 ,编写宏命令生成对话
框 ,如图 2 所示 。通过改变输入参数实现推杆的参
数化建模 ,最终完成整个凸轮机构的建模 。在已建
好的凸轮上施加转动副和驱动 ,在凸轮廓线和推杆
尖顶之间添加高副 ,在推杆与机架之间施加移动副 ,
这样就可创建直动尖顶凸轮机构仿真模型 。
(1)
a = d v/ d t = 2 C2ω2 + 6 C3ω2δ+ 12 C4ω2δ2 +
基于ADAMS的凸轮机构设计与仿真

线运动,本文就以插床机构为例,基于 ADAMS 进行凸轮
机构的设计。由凸轮机构实现工作台预期的往复直线运
动,因此凸轮机构的运动规律一般是已知的,在这里假定
凸轮机构中从动件最大摆角 20°、从动件杆长 126mm、许
用压力角 41°、推程运动角 65°、机架 L 长 135mm 和基圆
半径 40mm。利用 VC++6.0 编程语言,计算出绘制凸轮机
度是上可取的,但对于轮廓曲线比较复杂的凸轮机构来
说,显然存在这样一个弊端,就是在数据传输的过程中很
有可能出现信息失真的现象。因此,本文基于 ADAMS 软
件完成了凸轮机构的设计到仿真整个全过程。
2 凸轮机构运动规律分析[1,2]
计算任意位置的压力角公式为:
tanα=
l×
d" d#
[! a×c(os "0+")- 1]
!!!!!!!!!! 作者简介:韩宝菊( 1975-),女,讲师,硕士,研究方向为机械系统动态
设计。
( time- 75/360:20*PI/180,20*PI/180,i(f time- 107.5/36(0: 20*PI/180- 收稿日期:2006- 08- 10
92 机械工程师 2007 年第 1 期
4 凸轮机构仿真分析 对该凸轮机构施加约束和驱动,进行仿真分析,输出
摆杆转动角速度与角加速度,如图 4 所示。由于从动件摆 杆的运动规律为等加等减速,故为柔性冲击,从曲线图 4 可以看出,在摆杆运动的开始、中点和终了位置,也就是 在摆杆速度突变的位置点,角加速度都发生了有限量的 突变,这种突变是由等加速到等减速的柔性冲击所引起 的,而且这种突变也往往会使凸轮机构中引起有限的冲 击。由以上凸轮机构的设计分析结果可以看出,该设计是 与凸轮的实际工作情况相符的,满足实际要求。
adams凸轮总结

Adams中凸轮的建立知识总结Adams中凸轮有两种:一、Point-Curve点线凸轮,添加时,先选择从动件上的一个marker点,然后在选择凸轮的轮廓曲线。
而凸轮的轮廓曲线也有两种,curve和edge具体选择那种要根据实际情况来定。
二、Curve-Curve线线凸轮,添加时先选择从动件上的一条曲线,然后再选择凸轮的轮廓曲线。
选择曲线时first和second也有两种情况curve和edge 具体选择那种也是根据情况来定。
各种例子解析:一、点线凸轮:(1)小球-曲线凸轮:见[附件tulun(a)]仿真目的:想让这个小球沿着这条曲线运动。
建模过程:首先建立的一条spline曲线,可以是任意的,然后建立一个小球。
添加运动副过程:然后添加凸轮副(用Point-Curve)。
首先选择小球的小球的中心点cm,然后选择那条曲线。
固定那条曲线,然后就可以进行仿真了。
注意点:1、一定要固定那条曲线,否者仿真不能进行。
2、所选择的marker点可以和曲线不在同个平面上。
(2)摆动凸轮:见[附件tulun(b)]仿真目的:建立摆动式槽形凸轮。
建模过程:首先建立两个杆件,然后通过spline用add to part命令建出凸轮的轮廓曲线。
添加运动副过程:凸轮副用Point-Curve,同样是先选择下面那个连杆最上端的那个marker点,然后再选择上面那个连杆上的那条曲线作为凸轮的轮廓曲线。
注意点:凸轮的轮廓曲线可以和上面那个实体连接方式有两种,合并和固定副连接。
(3)尖底从动凸轮:见[附件tulun(c)]仿真目的:所有件都用曲线来表示来表示凸轮运动。
建模过程:首先建立一个封闭的曲线来代表凸轮的主动件,然后建立一条直线来代表凸轮的从动件,然后在两个件的接触点出添加marker 并且这个marker一定要隶属于从动件。
添加运动副过程:首先给上面那条曲线添加铰链和驱动,然后给下面的曲线添加移动副。
凸轮副的添加是先选择接触点出那个新建的marker点,然后再选择上面那条曲线作为凸轮的轮廓曲线。
用ADAMS进行凸轮机构模拟仿真示例

例: 尖顶直动从动件盘形凸轮机构的凸轮基圆半径mm r 600=,已知:从动件行程mm h 40=,推程运动角为ο1500=δ,远休止角ο60=s δ,回程运动角ο1200='δ,近休止角为ο30='s δ;从动件推程、回程分别采用余弦加速度和正弦加速度运动规律。
对该凸轮机构进行模拟仿真。
解: 1. 从动件推程运动方程推程段采用余弦加速度运动规律,故将已知条件mm h 406/51500===、。
πδ代入余弦加速度运动规律的推程段方程式中,推演得到 ⎪⎪⎪⎩⎪⎪⎪⎨⎧=≤≤=-=δωπδδωδ56cos 8.28)6/50( 56sin 24)56cos 1(202a v s 2. 从动件远休程运动方程在远休程s δ段,即6/76/5πδπ≤≤时, 0,0,===a v h s 。
3. 从动件回程运动方程 因回程段采用正弦加速度运动规律,将已知条件mm h v 403/21200==='、πδο代入正弦加速度运动规律的回程段方程式中,推演得到[]⎪⎪⎪⎩⎪⎪⎪⎨⎧--=≤≤---=⎥⎦⎤⎢⎣⎡-+-⨯=)5.33sin(180)6/116/7( )5.33cos(160)5.33sin(212375.2402πδωππδππδωππδπδπa v s 4. 从动件近休程运动方程在近休程s 'δ段,即πδπ26/11≤≤时, 0,0,0===a v s 。
创建过程1、 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:tuluen ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框2、 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
基于ADAMS的凸轮机构设计及运动仿真分析
(V hce Moi o e n ier g o ee H n nU i ri cec ei & l t eP w r gnei l g, e a nv syo S i e&T cn lg, u yn 7 0 3C i ) v E nC l e t f n eh o y L o a g 10 ,hn o 4 a
:
2w 15 6 4s ‘ n
( -8 5r ) 0 -  ̄6 /
于一体 的虚拟样机软件 , 它最主要 的模块为 A A / i ( 户 D MSVe 用 w
界面模块1 A A SS l r求解器 ) 和 D M /o e( v 。通过这两个模块 , 以对 可
a 2 .t2 o 占 = 8 8oc s
AA D MS (uo t y a i A  ̄ s f ca i l ytm A t i D n mc n yi o Mehnc s ) mac s aS e : 0 1cs 占 2 (- o )
、
软件是 由美国 MS C公 司开发研制 的集建模 、 求解 、 可视化技 术
力或力 矩的运 动激励 , 就可 要适 当地设计出凸轮的轮廓 曲线 ,就可以使推杆得到各种预期 在模型上施 加一定 的运 动约束副 、
的运动规律【 l 1 。凸轮轮廓的设计方法主要有图解法 和解析法。图 以进行运动仿真分析。
解 法设计 凸轮廓 线原理简单 、 观易行 , 直 但绘 图误差 较大 ; 用解 析法设计凸轮廓线虽然计算精度较高 , 但其推导过程复杂 , 程 编
基 于 A A 凸轮机 构设计及运动仿真分析 六 D MS的
徐 芳 周志 刚
( 河 南科技 大学 机 电工程学 院 。 阳 4 10 ) , 洛 7 0 3( 河南 科技大 学 车辆 与动 力工程 学院 , 阳 4 1 0 ) 洛 7 0 3
adams4.1 凸轮机构1
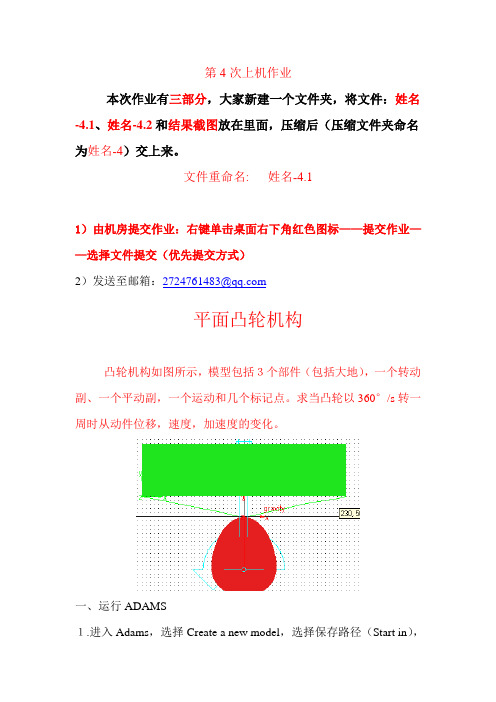
第4次上机作业本次作业有三部分,大家新建一个文件夹,将文件:姓名-4.1、姓名-4.2和结果截图放在里面,压缩后(压缩文件夹命名为姓名-4)交上来。
文件重命名: 姓名-4.11)由机房提交作业:右键单击桌面右下角红色图标——提交作业——选择文件提交(优先提交方式)2)发送至邮箱:2724761483@平面凸轮机构凸轮机构如图所示,模型包括3个部件(包括大地),一个转动副、一个平动副,一个运动和几个标记点。
求当凸轮以360°/s转一周时从动件位移,速度,加速度的变化。
一、运行ADAMS1.进入Adams,选择Create a new model,选择保存路径(Start in),修改模型名称,确认Gravity(重力)为Earth Normal,Units为MMKS。
2.设置网格:Spacing栏x和y都输入10mm二、建立凸轮F4打开坐标框,在bodies 下单击样条曲线命令,打开参数设置对话框,如图设置,,绘制多义线。
接下来,在屏幕上点击13个点(最后一点与第一点重合),点击右键生成曲线。
将part重命名为:cam三、建立转动副在connector下点击,设置参数为,鼠标左键点击(0,-130,0),在大地和凸轮间生成一个铰接点。
四、建立从动件单击样条曲线命令,设置为,绘制不封闭的曲线,按表点击11个点,点击右键绘制开放曲线,如图。
将part重命名为follower。
在bodies下单击,参数设置为,点击刚建立的follower,以添加物体。
定义箱子顶点为(-250,50,0),按住鼠标拖动至右上顶点(250,180,0)如图。
五、建立平动副在connector下点击平动副,参数设置为,点击平动副位置(0,160,0),沿Y轴向上移动鼠标,设置平动副方向,如图。
六、添加线-线约束在connector下点击凸轮接触图标。
点击凸轮部件,再点击从动件的曲线部分,建立如图线-线接触约束。
七、添加运动约束在motion下单击旋转铰运动,点击凸轮的旋转副位置,生成如图。
ADAMS上机例题解析
ADAMS上机实验报告姓名:崔哲华专业:工程力学学号:1608074214一、问题描述凸轮推杆机构如图1所示。
在图示瞬时,已知凸轮半径为R , 60=ϕ,凸轮的速度和加速度分别为v 和a 。
试求图示瞬时推杆AB 的速度和加速度,并与理论值比较。
图 1.凸轮推杆机构二、ADAMS 建模分析在该问题中,凸轮作为主动件,在地面上做水平直线匀变速运动,其速度方向及加速度方向均水平向右。
在凸轮驱动下,杆件AB 在竖直方向做直线运动。
因而,建立此模型需要3个部件,即大地(part1)、凸轮(part2)、推杆AB(part3)。
3个约束,即凸轮与大地之间用移动副连接、推杆AB 与大地之间用移动副连接、凸轮与推杆AB 之间是点线约束。
以下建模中,用半圆弧代替凸轮,用矩形代替推杆。
三、ADAMS 建模步骤1、设置工作栅格Menu>Settings>Working Gird:首先设置工作平面大小(SIZE)为2000mm×2000mm,其次设置栅格间距(Spacing)为25mm,其余设置不变,点击OK,如图2所示。
图 2.设置工作栅格2、创建半圆弧1Bodies>Construction>Geometry:Arc>New Part:在Radius前的方框中打对勾,在后面的方框中输入40.0cm。
Start Angle(起始角度)输入0.0d,End Angle(终止角度)为180.0d,圆弧不闭合,如图3所示。
图 3.半圆弧1参数设置Menu>View>Coordinate Window:打开坐标窗口,在原点附近点击右键,弹出坐标窗口1,输入坐标(0.0,0.0,0.0),点击Apply,再点击右键,弹出坐标窗口2,输入坐标(400.0,0.0,0.0)点击Apply。
得到半圆弧1,如图6所示。
图 4.坐标窗口1图 5.坐标窗口2图 6.半圆弧13、创建矩形Bodies>Construction>Geometry:Polyline>New Part:创建多段线,不闭合。
基于Adams的凸轮机构运动仿真教程

基于adams的凸轮机构运动仿真摘要:虚拟样机技术是一种崭新的产品开发技术,其中ADAMS软件是目前最著名的虚拟样机分析软件之一。
本文阐述了虚拟样机技术和ADAMS软件的特点及其应用,以凸轮机构为研究对象,对其进行动力学分析。
主要运用我们学习过的机械原理等理论知识对机构进行运动学和动力学的相关理论计算;利用ADAMS软件在图形显示方面的优势,采用其基本模块ADAMS/View(界面模块)进行一系列建模、运动分析和动态模拟仿真工作,验证模型的正确性,并对机构在整个周期内的可行性进行计算分析,记录相应信息,输出所需要的位置、速度、加速度等曲线与理论结果比较,充分展现虚拟样机技术的优越性,为虚拟样机技术的深入研究打下基础。
关键词:ADAMS;凸轮机构;运动学分析;仿真引言凸轮机构的应用十分广泛,在生产机械中应用凸轮机构可以较容易的实现不同的工作要求。
特别是实现间歇式的运动过程!但是,目前对于该类模型的动态仿真很少。
本例主要就推程、回程等要求进行预设。
力图通过adams实现对该凸轮机构的构建以及后续的仿真,并尝试进行一定的机构优化。
1.研究内容这里,我主要研究内容为理论凸轮设计在adams中的设计及其动态仿真。
后续,根据输出的相应的速度、加速度曲线等将进行一定的设计优化。
力图真实还原凸轮机构在设计中的真实过程。
2.工作原理凸轮机构是由凸轮,从动件和机架三个基本构件组成的高副机构。
凸轮是一个具有曲线轮廓或凹槽的构件,一般为主动件,作等速回转运动或往复直线运动。
通过对凸轮轮廓进行不同的设计,可以实现从动件不同形式的运动。
以此来满足机械设计中对于运动的精细控制过程。
3.动力学建模(1)建模前期准备情景设想:某公司需要设计一凸轮机构实现对物料的间歇夹紧过程。
其给出相应数据如下。
注:其他的暂不作要求。
(2)设计前期准备。
目前,凸轮机构的设计主要有:①利用excel创建凸轮运动轨迹点,再导入相应三维设计软件进行建模。
adams凸轮机构反转法的设计[新版]
![adams凸轮机构反转法的设计[新版]](https://img.taocdn.com/s3/m/70d8d337182e453610661ed9ad51f01dc3815745.png)
凸轮机构的设计凸轮机构的设计一般采用反转法,是在选定从动件的运动规律和确定凸轮机构基本尺寸(基圆半径和偏距)的前提下,采用反转法原理设计出凸轮的轮廓曲线。
从动件运动规律:S=(h/Φ)θ(0°≤θ≤180°)S=(h/2)*(1+cos((pi/Φ)*(θ-180))) (180°≤θ≤360°)其中,h=100mm,Φ=180,θ=ωt运用IF(expr1:expr2,expr3,expr4)函数启动ADAMS/View启动ADAMS/View,选择“Create a new model”,在model name框中输入cam,如图,单击OK,进入工作界面。
修改工作栅格在主菜单栏中,选择下拉菜单中,并将size中的x,y分别改为400,300,将spacing中的x,y改为10,10,如图在工作屏幕区内随意单击一下,然后按F4,在工作区右下角显示坐标窗口。
创建从动件1.在主工具箱中,单击圆锥工具图标在参数设置栏中是,设置New Part: Length=ON,length=50,Bottom Radius=10,Top Radius=0.01,并在工作区内分别选择(0,50,0),(0,0,0)两点建立圆锥模型,如图2.在主工具箱中,单击圆柱工具图标在参数设置栏中选择Add to Part,Length=ON,Length=150,Radius=ON,Radius=10。
在工作区内单击圆锥体,然后单击Part_2 .Marker_1点创建模型。
如图3.在主工具箱中,选择标记点工具图标在参数设置栏中选择Add to Part,Global XY,然后在工作区内单击从动件,再单击(0,0,0)点,即可创建一个Marker点。
如图移动从动件在主工具箱中,选择偏移工具图标选中从动件,在Translate中的Distance输入20,左移;输入98,上移。
工作区中的从动件将会做相关的移动。
adams实例练习

练习一:凸轮机构建模仿真与测量凸轮机构如下图所示,模型包括三个部件(包括大地),一个转动副,一个移动副,一个凸轮运动副和几个标记点。
步骤简介:1)运行ADAMS进行设置①双击桌面ADAMS\View图标,运行ADAMS2005、在wellcome中选择create a new model、在gravity文本框中选择EARTH Normal(-Global Y),Units中是MMKS。
Ok进入ADAMS②选择setting——working grid,打开栅格设置对话框,在spacing栏,X、Y均输入10mm③单击主工具箱中的选择图标④点击缩放图标,使栅格布满整个屏幕。
2)建立凸轮部部件①点击F4或图标,弹出坐标窗口②鼠标右键单击建模图标③鼠标左键单击多义线图标,④主工具箱下方打开参数设置对话框,依次选择new part、closed,绘制封闭多义线⑤按下表在屏幕上连续点击13个点,注意最后一个与第一个重合。
⑥单击鼠标右键,生成曲线。
(注:此时出现一提示框,提示该曲线无质量,关闭即可)3)建立转动副①在主工具箱中,点击链接图标②主工具箱下方参数设置,construction文本框中选择1 location、normal to grid③鼠标左键点击(0,-130,0)在地和凸轮间生成一个铰接支点。
4)建立其它部件①鼠标左键单击多义线图标②在主工具箱下方设置参数,new part 、关闭closed,绘制不封闭多义线③在屏幕上依次点击下列11个点④完成上述各点后,单击鼠标右键,绘制开放的曲线⑤在主工具箱中点击box图标⑥在下方的状态参数设置中,选择add to part⑦鼠标先点击开放的曲线⑧鼠标再点击(-250,50,0)⑨拖动鼠标至点(250,180,0),释放鼠标,建立实体5)建立平移副①点击主工具箱中的平移图标②主工具箱下方的设置为:construction中,1 location 和pick feature③鼠标在(0,160,0)处点击,完成大地与平移件的链接6)添加凸轮约束①鼠标右键单击链接图标,得下一级图标,左键单击凸轮约束图标②下方的设置中2D curve-curve: first (curve);second (curve)③鼠标依次点击凸轮、平移件,完成凸轮与平移件的凸轮链接7)添加运动约束①主工具箱中点击旋转铰运动图标②在主工具箱的下方,进行以下设置:speed栏输入360d,即每秒360度③鼠标点击凸轮的旋转副位置,出现一个大的运动方向箭头。
ADAMS滚子从动件凸轮机构建模与分析

2.4.3滚子从动件凸轮机构已知一滚子移动从动件盘形凸轮机构,凸轮1为一半径R=100mm的偏心圆盘,凸轮的回转中心A到凸轮的几何中心0的距离H=30mm,凸轮匀速转动的角速度 =30d/s。
1. 启动ADAMS/View。
2.创建凸轮机构模型名称:gunzizhidong。
3. 设置工作环境:保持系统默认单位值,设置工作网格,如图2-47所示。
设置工作图标如图2-48所示。
然后按F4,打开光标位置显示。
图2-48 工作网格图2-49 工作图标4. 创建凸轮:(1)创建圆曲线:在ADAMS/View零件工具库中,右键点击,然后左键选择circle ,然后在工作区中的(0,0,0)位置,则创建出一个半径为100mm的圆曲线。
(2)右击圆曲线弹出快捷菜单选择Circle:CIRCLE_1/Modify弹出Geometry Modify Curve Circle对话框。
然后将Segment Count更改为50。
(3)点击,选择,然后如图2-50设置参数。
然后单击PART_2,然后再单击PART_2.CIRCLE_1。
然后将构建更名为cam。
5.创建滚子(1)创建圆曲线:在ADAMS/View零件工具库中,右键点击,然后左键选择circle ,然后在工作区中的(0,0,0)位置,则创建出一个半径为20mm的圆曲线。
(2)右击圆曲线弹出快捷菜单选择Circle :CIRCLE_1/Modify 弹出Geometry Modify Curve Circle 对话框。
然后将Segment Count 更改为50。
(3)点击,选择,然后同图2-50设置参数。
然后单击PART_2,然后再单击PART_2.CIRCLE_1。
然后将构建更名为gunzi 。
6.创建从动杆:单击,创建一个宽12,厚10的从动杆件。
重命名为follower 。
7.添加运动副:如图表2-1所示。
名称图标 所属构件 JOINT_RJOINT_RGJOINTCVCV_Ccam 与ground gunzi 与follower follower 与ground gunzi 与 cam 其中为线线凸轮副约束,其创建过程如下:单击,设置参数如图2-51所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例: 尖顶直动从动件盘形凸轮机构的凸轮基圆半径mm r 600=,已知:从动件行程mm h 40=,推程运动角为 1500=δ,远休止角 60=s δ,回程运动角 1200='δ,近休止角为 30='s δ;从动件推程、回程分别采用余弦加速度和正弦加速度运动规律。
对该凸轮机构进行模拟仿真。
解: 1. 从动件推程运动方程推程段采用余弦加速度运动规律,故将已知条件mm h 406/51500===、。
πδ代入余弦加速度运动规律的推程段方程式中,推演得到 ⎪⎪⎪⎩⎪⎪⎪⎨⎧=≤≤=-=δωπδδωδ56cos 8.28)6/50( 56sin 24)56cos 1(202a v s 2. 从动件远休程运动方程在远休程s δ段,即6/76/5πδπ≤≤时, 0,0,===a v h s 。
3. 从动件回程运动方程 因回程段采用正弦加速度运动规律,将已知条件mm h v 403/21200==='、πδ 代入正弦加速度运动规律的回程段方程式中,推演得到[]⎪⎪⎪⎩⎪⎪⎪⎨⎧--=≤≤---=⎥⎦⎤⎢⎣⎡-+-⨯=)5.33sin(180)6/116/7( )5.33cos(160)5.33sin(212375.2402πδωππδππδωππδπδπa v s 4. 从动件近休程运动方程在近休程s 'δ段,即πδπ26/11≤≤时, 0,0,0===a v s 。
创建过程1、 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:tuluen ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框2、 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置 (Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成250mm 和300mm ,间距(Spacing )中的X 和Y 都设置成10mm 。
然后点击“OK ”确定。
2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在模型窗口中,点击鼠标左键并按住不 放,移动鼠标进行放大或缩小。
3、 用升程表创建凸轮轮廓曲线3.1 在ADAMS/View 零件库中选择球体(Sphere ),在原点(0,0,0)(选择坐标原点,将为下面利用升程表创建凸轮轨迹带来方便)处创建一个球形观察点,球体的参数选择“New Part ”,半径选择10mm (这里只要求球形观察点的运动轨迹就行,为了观察清楚,将球形观察点用一定半径大小的球体来表示),创建后的名称默认为“Part: PART_2”。
根据凸轮基圆半径mm r 600 ,在点(0,60,0)处创建第二个球体(Sphere ),球体的参数选择“New Part ”,半径选择10mm (理由同上),创建后的名称默认为“Part:PART_3”。
3.2 在ADAMS/View 约束库中选择旋转副(Joint: Revolute ),参数选择为“2 Bod-1 Loc ”和“Normal To Grid ”,鼠标左键先点击原点出的球体(PART_2),再点击机架(ground ),最后在球体中心点击鼠标右键,弹出Select 对话框,如图3-1所表示,选择“PART_2.cm ”,然后点“OK ”确定。
在球体(PART_2)上成功创建旋转副(Joint: JOINT_1),如图3-2所示。
图 3-1 选择对话框 图 3-2 在球体(PART_2)上创建旋转副 3.3 在ADAMS/View 约束库中选择移动副(Joint: Translational ),参数选择为“2 Bod-1 Loc ”和“Pick Feature ”,鼠标左键先点击点(0,60,0)处的球体(PART_3),然后点击原点处的球体(PART_2),最后在球体(PART_3)中心点击鼠标右键,在弹出Select 对话框中选择“PART_3.cm ”,然后点“OK ”确定,就会出现白色的箭头,移动光标,使箭头指向Y 轴的正方向后点击鼠标左键,从而在球体(PART_3)上成功创建移动副(Joint:JOINT_2),如图3-3所示3.4 在ADAMS/View 驱动库中选择旋转驱动(Rotational Joint Motion ),在速度(Speed )栏中,输入速度值360d ,表示驱动装置每分钟转360度,用鼠标左键点击球体(PART_2)上的旋转副(JOINT_1),在旋转副上出现一个大的驱动图标,即为驱动装置(Motion: MOTION_1),如图3-4所示3.6 在ADAMS/View驱动库中选择移动驱动(Translational Joint Motion),参数默认,用鼠标左键点击球体(PART_2)上图3-3在球体(PART_3)上创建移动副图3-4 在球体(PART_2)上定义旋转驱动的移动副(JOINT_2),同样在移动副上出现一个大的驱动图标,即为驱动装置(Motion: MOTION_2),如图3-5所示。
图3-5 在球体(PART_3)上定义移动驱动图3-6 重新设置移动驱动的参数3.7 在球体(PART_3)上点击鼠标右键,选择Motion: MOTION_2→Modify,如图3-6所示。
出现Joint Motion对话框,如图3-7所表示,接着点击Function Builder图标,出现Function Builder对话框。
3.8 在Function Builder中的Define a runtime function栏中输入如下语句:“IF(time-5/12:20*(1-cos(6/5*360d*time)),40,IF(time-7/12:40,40,IF(time-11/12:40*(2.75-3*time+1/(2*pi)*sin(3 *2*pi*time-3.5*pi)),0,IF(time-1:0,0,0))))”,然后点击,如果出现“Function syntax is correct”对话框,则表示输入的语句没有语法格式上的错误,如图3-8所示;否则输入语句中存在格式上的错误。
然后一直点“OK”,直到退出Joint Motion对话框。
3.9 选择仿真(Simulation)图标,将仿真停止时间(End Time)设置为1,为了使由轨迹生成的凸轮轮廓曲线光滑,而又缩短计算机生成曲线的计算时间,综合这两方面的要求,我们这里将输出结果(轨图3-7 Joint Motion对话框图3-8 Function Builder对话框迹)的总步数(Steps)设置为100。
点击仿真按钮(Play);当仿真结束,点击复位按钮(Rewind)。
3.10 在ADAMS/View菜单栏中,选择Review下拉菜单中的Create Trace Spline命令,然后用鼠标左键点击球体(PART_3),接着在原地右击鼠标,在弹出的Select对话框中选择PART_3.cm,之后点击对话框左下角的“OK”按钮,最后用鼠标左键点击机架(ground),凸轮的轨迹曲线(BSpline: GCURVE_3)如图3-9所示。
图3-9 凸轮的轮廓曲线4、创建凸轮实体4.1 凸轮的轨迹曲线生成后,在球体(PART_2)上右击鼠标,选择Part: PART_2→Delete,出现如图4-1所示的对话框,表示将要删除球体及其与之相关的约束和运动副。
点击Delete All,删除球体(PART_2)。
图4-1 删除命令的提示框4.2 在球体(PART_3)上右击鼠标,选择Part: PART_3→Delete,同样出现图4-1所示的对话框,点击Delete All,删除球体(PART_3)。
删除之后的图形如图4-2所示。
图4-2 删除球体之后的图形图4-3 几何尺寸修改对话框4.3 在曲线上右击鼠标,选“--Bspline: GCURVE_3→Modify”,出现Modify Geometric Spline对话框,如图4-3所示。
点击对话框中的Location table图标,打开Location Table对话框,如图4-4所示。
图4-4 Location Table 对话框图4-5 保存对话框4.4 在Location Table对话框中,点击“Write”按钮,出现Select File保存对话框,如图4-5所示,在文件名栏中输入保存名“tulun.dat”(名字可以随意取,但不要忘记后缀“.dat”),然后点击“打开”,进行保存。
最后点击“OK”按钮两次,分别退出Location Table对话框和Modify Geometric Spline对话框。
4.5 在ADAMS/View零件库中选择样条曲线(Spline)图标,参数选择如图4-6所示。
在ADAMS/View工作窗口中用鼠标左键随意选取12个不同的点(至少要取8个点),然后点击鼠标右键进行确定。
如图4-7所示,图中绿色的闭合曲线就是所画的样条曲线,曲线上11个红色的小块表示11个所取的点。
图4-6 参数选择图4-7 绘制样条曲线4.6 在所画的样条曲线(绿颜色的)上右击鼠标,选择“--Bspline: GCURVE_4→Modify”,出现Modify Geometric Spline对话框,如图4-8所示,在该对话框中选择Location table图标,出现Location Table 对话框,如图4-9所示。
由于每个人所画的样条曲线的不一样,相应的X、Y、Z坐标也就不一样。
图4-8 几何尺寸修改对话框图4-9 Location Table 对话框4.7 在Location Table对话框中,点击“Read”按钮,打开上面保存的“tulun.dat”文件。
则Location Table对话框中的X、Y、Z坐标值产生了变化,如图4-10所示。
然后点击“OK”按钮两次,分别退出Location Table对话框和Modify Geometric Splin e对话框。
则在步骤4.5中所画的样条曲线(绿色的)变成了与轨迹曲线(BSpline: GCURVE_3)(白色的)一模一样的曲线。