机械手(码垛机)液压与PLC系统的设计与仿真毕业设计
基于PLC的机械手操纵系统设计毕业设计
本科生毕业设计基于PLC的机械手操纵系统设计学生姓名所在学院专业及班级指导教师完成日期摘要本文在了解机械手和PLC操纵技术的国内外研究现状及进展趋势基础上,选用四自由度液压机械手作为操纵对象进行研究。
由于液压机械手具有大功率、易操纵和快速性等特点,在工业各领域取得普遍的运用。
四自由度液压机械手涉及到了机械设计、液压系统和操纵系统等综合知识,是典型的机电液一体化系统。
本文在分析机械手工作环境和要完成的任务后,选定了机械手的机构;在分析机械手各动作后,对液压部份进行了分析。
液压部份是操纵的关键所在,本系统是通过PLC操纵电磁阀的电磁铁,从而实现对机械手各动作的操纵。
通过度析系统对输入输出数据釆集的要求,选择适当的PLC、I/O模块、信号搜集元件压力变送器、分派PLC输入输出地址、设计操纵系统电路和操纵柜。
最后,本设计以四自由度液压机械手为对象,采纳公司生产的西门子PLC和触摸屏进行操纵,用自带编程软件STEP 7 MicroWIN SP3与 Wincc flexible 2020编程实现机身旋转、手臂伸缩、手腕转动和手指夹取等自动、半自动和点动动作。
关键词:机械手; PLC;触摸屏;传感器;操纵;程序AbstractThis article is based on the understanding of the manipulator and the PLC technology at home and abroad based on the present situation and development trend, selected Four-DOF hydraulic manipulator as the control object to study.As the hydraulic manipulator with, high-power, easy control and fast, etc. Widely used in various industrial fields, Four-DOF hydraulic manipulator Involve Mechanical Design Hydraulic System Control System Is a typical mechanical and electronic integration system This article analyzes the manipulator working environment, and mission to complete, then selected the manipulator, while analysis the manipulator motion, Analysis the hydraulic parts. Hydraulic part is the key to control, this system control the Electromagnet of Solenoid valve by the PLC, In order to achieve the movement of the manipulator control. Pressure Transmitter and Grating sensor by Analysis the hydraulic system on the input and output data collection requirements. I/O module, signal acquisition components pressure transmitter, PLC I/O address distribution, design control system circuit and the control cabinet.Finally, the subject is an object with four degrees of freedom hydraulic manipulator, the company production of Siemens PLC and touch screen control, with their own programming software STEP 7 MicroWIN SP3 and Wincc flexible 2020 programming implementation body rotation, telescopic arm, wrist and fingers point such as automatic, semiautomatic and motion.Key words: manipulator; PLC; Touch screen. The sensor; Control; The program目录第一章绪论.................................................. 错误!未定义书签。
工业机械手plc控制系统毕业设计

工业机械手plc控制系统毕业设计工业机械手在现代化的生产线中扮演着重要的角色,它可以高效地完成各种物品转移操作,但是机械手的运作离不开PLC控制系统的支持。
因此,本文将围绕“工业机械手PLC控制系统毕业设计”展开阐述。
第一步,进行需求分析。
在进行PLC控制系统设计之前,首先需要了解客户的具体需求,包括机械手的移动速度、精度、各种动作状态、传感器的数量等等因素。
针对这些要求进行详细分析,方便后续控制程序的编写。
第二步,进行PLC选型。
在根据客户需求推算出所需要的控制模块后,可以进行PLC选型。
考虑到冗余备份和可靠性要求,一般会采用双控制模块和双电源供电模块的设计方案,以确保系统的高可靠性和稳定性。
第三步,进行程序设计。
PLC程序设计分为由编辑、编译、下载到PLC并运行、调试等步骤,需要详尽地分析程序逻辑、动作流程和异常处理等内容。
同时,还应该编写人机界面(HMI),方便人员进行系统的监控、操作和故障排除等工作。
第四步,进行现场测试。
在PLC控制程序编写之后,需要进行现场测试以确保程序的稳定性和可靠性。
此时要进行疯狂测试,跑黑盒白盒、配置自检等多个测试方式,确保程序能够符合客户的需求。
第五步,进行评估和优化。
在测试过程中,需要对系统运行数据进行评估和分析,并对程序进行优化。
调整参数和算法,优化运行效率和准确率,最终确保系统能够达到高效稳定的运行状态。
综上所述,关于“工业机械手PLC控制系统毕业设计”,需要进行需求分析、PLC选型、程序设计、现场测试和评估优化等步骤。
这种设计方案需要掌握扎实的基础理论知识和丰富的实践经验,而且需要具备敏锐的技术洞察力以及灵活应变的能力。
只有这样才能够完成高质量的PLC控制系统毕业设计。
基于PLC的机械手自动操作系统设计本科毕业设计
1绪论1.1课题提出背景如今,机械自动化已经成为了新时代的主题。
其中,机械手是工业生产过程中应用最多的,而且它的发展也是最快的。
工业生产自动化的程度越来越高,而生产环境变得越来越恶劣,这样对工人提出了更高的要求,比如安全性、健康性、环保性等。
机械手可以有效的解决这个问题,它可以在高温、高压、有毒、放射性等场合应用。
在机械制造行业中,机械手又称工业机器人,它主要被应用于运送加工原料或者给特定的机床进行刀具的转换和机器的装配等一些自动化流水生产线上。
综上所述,机械手的应用更加有效率,同时还能降低生产成本。
机械手是一门综合性的学科,它包含了机械、电子、材料、自动控制等许多学科方面的知识。
随着计算机和电子技术的飞速发展,机械手也不断的更新换代,朝着精密化、智能化、复杂化的方向发展。
如今的机械手加入了传感器反馈系统,当机械手发生故障时,它可以自我检测,并且自动修复。
工业的自动化程度的高低离不开PLC,它的控制能力越高,自动化的程度也越高。
所以PLC常被用于工业生产中,随着它的地位逐渐增长,它的功能也随之有了很大的提高。
对于PLC而言,它的程序编写容易、系统操作灵活,同时对于控制也方便实现,这样能够提高工业生产的效率和加工的质量。
在一些恶劣的环境下,PLC同样能够取代人类去完成一些控制,从另一方面而言,成本也相对减轻了许多。
基于PLC设计的机械手自动操作系统,更加容易实现生产的连续性。
在本次设计任务中,选用三菱系列的PLC对机械手进行控制,完成自动操作系统的设计。
实现对机械手的上下、左右、旋转等控制,要完全实现这些,还需要其它辅助元器件,比如气缸、传感器、电磁阀、底座和支架等。
为了能够更加直观的对机械手的动作进行展示,在本次设计中加入了组态软件对机械手进行监控。
MCGS是一种用于对机械手整体监控的一种组态软件,通过对机械手运动数据的采集,MCGS以动画形式表现,对机械手的运动过程进行监控和整个流程的控制。
1.2国内外研究现状在1954年,美国的著名工程师沃尔德最早提出了人机一体化的构想;到了1959年,拥有丰富创造力的两人沃尔德和英格伯一同制造出了世界上第一台机械手;1962年时,美国政府将机械手的实用性做了相关的叙述,机械手慢慢被大家所认知;1970年在美国召开了第一届有关机械手相关的会议,主要研究它的价值和实用性;1973年美国一家公司开始制造出了一台小型的机械手,为工业发展做奠基;直到1980年,机械手在日本很快的发展起来,使得机械手得到了充分的改进,现在机械手正在向智能化、高速化、精密化的方向发展,机械手的定位精度也是越来越高,能达到现在的纳米级别,它的运行速度可以达到3m/s,产出的产品可以达到6轴,夹起工件的重量也是越来越大。
机械手PLC毕业设计
1绪论随着我国工业生产的飞跃发展,自动化程度的迅速提高,实现工件的装卸、转向、输送或操持焊枪、喷枪、扳手等工具进行加工、装配等作业的自动化,已愈来愈引起人们的重视。
机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手二生产中应用机械手可以提高生产的自动化水平和劳动生产率;可以减轻劳动强度、保障产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。
1、1机械手及其组成1、1、1什么是机械手机械手是一种能模仿人手臂的某些动作功能,按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手是工厂企业高度自动化的标志,它能完成许多高技术难度和繁重的体力劳动,尤其对于高温、高压、高湿度、污染等不适宜以人工工作的环境中,机械手起到了不可取代的作用。
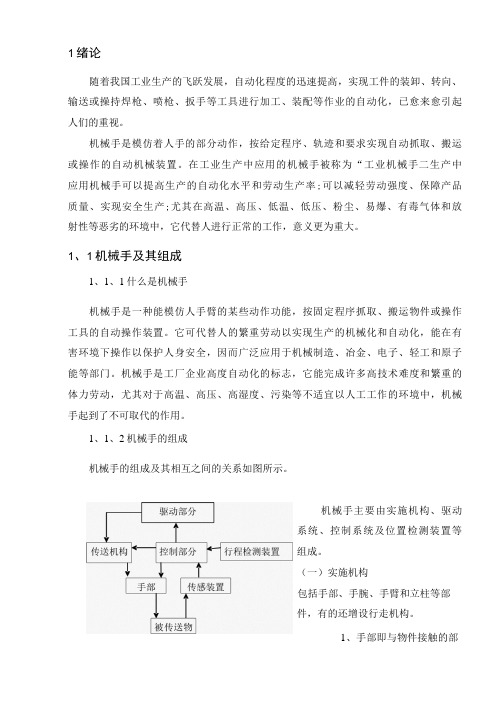
1、1、2机械手的组成机械手的组成及其相互之间的关系如图所示。
机械手主要由实施机构、驱动系统、控制系统及位置检测装置等组成。
(一)实施机构包括手部、手腕、手臂和立柱等部件,有的还增设行走机构。
1、手部即与物件接触的部件。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
2、手腕是联接手部和手臂的部件,其调整或改变工件方位的作用。
3、手臂支承手腕和手部的部件,用以改变工件的空间位置。
4、立柱是支承手臂的部件,立柱也可以是手臂的一部分,手臂的回转运动和升降(或俯仰)运动均与立柱有密切的联系。
5、行走机构机械手为了完成远距离的操作和扩大使用范围,可以增设滚轮行走机构。
滚轮式行走机构可分为有轨的或是无轨的两种。
毕业设计基于plc控制的机械手毕业设计

(六)军事工程及生物医学方面的研究和试验。
第二节
机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度 。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机 械手设计的关 键参数。自由 度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或DSP等微控制芯片构成,通过对其编程实现所要功能设置了停电保持器件(如备用电池),以保证断电后这部分存储器中的信息不会丢失。
(十)故障诊断功能
PLC可对系统组成、某些硬件状态及指令的合法性等进行自诊断,发现异常情况,发出报警并显示错误类型,如属严重错误则自动终止运行。
二、
PLC作为通用工业控制计算机,30年来,可编程控制器从无到有,实现了工业控制领域接线逻辑到存储逻辑的飞跃,其功能从弱到强,实现了逻辑控制到数字控制的进步,其领域从小到大,实现了单体设备控制到胜任运动控制、过程控制、及集散控制等各种任务的跨越,今天的可编程控制器正在成为工业控制领域的主流控制设备,在世界各地发挥着越来越大的作用,主要特点有:可靠性高,抗干扰能力强,能适应工厂环境。
1、肩的前后动作
2、肘的上下动作
3、腕(手)的动作
控制系统采用西门子PLC控制。运动形式:动力上下、左右两个自由度运动,均由两个液压伺服系统控制两个系统均为具有位置及动压反馈的闭环系统。
液压机械手PLC控制系统的设计

液压机械手PLC控制系统的设计概述本文档旨在介绍液压机械手PLC(可编程逻辑控制)控制系统的设计。
液压机械手是一种常见的工业设备,通过液压系统实现运动控制,而PLC作为控制系统的核心,负责控制信号的处理和输出。
设计要求液压机械手PLC控制系统的设计要满足以下要求:1. 稳定性:系统必须具有高稳定性,以确保机械手的运动精准度和安全性。
2. 功能性:系统需要具备多种功能,如位置控制、速度调节等,以满足不同场景的需求。
3. 可扩展性:系统应具备良好的可扩展性,以便于将来的升级和功能增加。
4. 易维护性:设计应考虑到系统的维护和故障排除,以便于后续维护工作的进行。
硬件设计液压机械手PLC控制系统的硬件设计包括以下方面:1. 选型:选择适合的PLC设备,根据需求选用不同型号和规格的PLC,确保其性能和稳定性。
2. 传感器:选择合适的传感器,如位移传感器、压力传感器等,用于采集机械手运动状态和环境信息。
3. 执行器:选择合适的液压阀、液压泵等执行器,保证系统能够精确控制机械手的各项动作。
4. 电气线路:设计合理的电气线路,确保信号传输的可靠性和稳定性。
软件设计液压机械手PLC控制系统的软件设计包括以下方面:1. PLC程序设计:使用PLC编程软件,根据机械手的运动逻辑和控制要求,编写PLC程序,实现各项功能。
2. 信号处理:对传感器采集的信号进行处理和分析,以获取机械手的状态信息。
3. 控制算法:设计合理的控制算法,根据机械手的控制需求,实现位置控制、速度调节等功能。
4. 用户界面:设计友好的用户界面,方便操作人员对机械手进行参数设置和监控。
系统测试与调试设计完成后,需要进行系统测试与调试,以验证系统的功能和性能:1. 单元测试:对各个模块进行单元测试,确保其功能正常。
2. 组装测试:将各个模块组装成完整的系统,对整个系统进行综合测试。
3. 调试优化:根据测试结果进行系统调试和优化,确保系统的稳定性和性能满足设计要求。
码垛机械手毕业设计
码垛机械手毕业设计码垛机械手设计 I摘要在现代工业中,生产过程中的自动化已成为突出的主题。
各行各业的自动化水平越来越高,现代化加工车间,常配有机械手,以提高生产效率,完成工人难以完成的或者危险的工作随着工业自动化发展的需要,机械手在工业应用中越来越重要。
用于再现人手的的功能的技术装置称为机械手。
机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为工业机械手。
文章主要叙述了机械手的设计计算过程。
首先,本文介绍码垛机械手的作用,码垛机械手的组成和分类,说明了自由度和机械手整体座标的形式。
同时,本文给出了这台机械手的主要性能规格参量。
文章中介绍了码垛机械手的设计理论与方法。
全面详尽的讨论了码垛机械手的手部、腕部、手臂以及机身等主要部件的结构设计。
最后用PLC对码垛机械手进行控制关键词:码垛机械手,液压传动,液压缸,PLC控制码垛机械手设计 II?ABSTRACT?In? modern? industry,? the? automation? of? the? production? process? has? become? a? prominent?theme.Increasingly?high?level?of?automation?in?all?walks?of?life, ?modern?processing?plant,?often?with?a?mechanical? hand? in? order? to? improve? production?efficiency,? to? complete? it? hard? for?workers? to?complete?the?work?or?risk?With? the? development? needs? of? industrial? automation,? mechanical? hand? more? and? more?important?in?industrial?ed?to?reproduce?the?functi on?of?the?technical?staff?of?the?device?is? called? robot.Robot? is? modeled? on? the? part? of? staffing? action,? according? to? a? given? program,?automatically? track? and? requirements? capture,? handling?or?operation?of? the? automatic?mechanical?devices.Application? in? industrial? production? is? known? as? industrial? robot? manipulator.This? paper?mainly?describes?the?design?of?the?manipulator?calculationFirst,? the? article? describes? the? role? of? robot? palletizing,? robotic? palletizing? composition? and?classification,? indicating? the? degree? of? freedom? and? the? coordinates? in? the? form? of? the? whole?manipulator.Meanwhile,?this?paper,?the?machinery?of?the?main?perf ormance?specifications?of?hand?parametersArticle?describes?the?robot?palletizer?design?theory?and?methodsprehensive?and?detailed?discussion?of?the?palletizing?robot's?hand,?wrist,?arm?and?body?a nd?other?major?components?of?the?structural?designFinally,?PLC?control?for?robotic?palletizer?Key?words:? Palletizer robot,? hydraulic?transmission,? hydraulic?cylinder,? PLC?control码垛机械手设计 III目录1 绪论1?1.2机械手的简史 1?1.3工业机械手在生产中的应用 2?1.4?机械手的组成3?1.4.1?执行机构 3?1.4.2?驱动机构 4?1.4.3?控制系统分类 4?1.5机械手的发展趋势4?1.5.1国外机械手领域发展趋势:? 4?1.5.2?我国机械手领域的现状及发展:? 4?1.6?本章小结 5?2? 机械手的总体设计方案 6?2.1?机械手基本形式的选择 6?2.2机械手的主要部件及运动? 7?2.3驱动机构的选择7?2.4?机械手的技术参数列表 7?2.5手臂的配置形式7?2.6位置检测装置的选择8?2.7?本章小结 8?3? 机械手手部的设计计算 9?3.1概述? 9?3.2?设计时应考虑的几个问题 9?3.3?手部设计基本要求? 9?3.4?典型的手部结构?10?3.5机械手手抓的设计计算10?3.5.1选择手抓的类型及夹紧装置10?3.5.2?手抓的力学分析?10?3.5.3?夹紧力及驱动力的计算13?3.5.4?手抓夹持范围计算?14码垛机械手设计 IV?3.6?本章小结??14?4? 腕部的设计计算??16?4.1?腕部设计的基本要求16?4.2?腕部的设计计算?16?4.2.1?腕部设计考虑的参数16?4.3.2?腕部的驱动力矩计算16?4.4?本章小结??17?5? 臂部的设计及有关计算??19?5.1?臂部设计的基本要求19?5.2?手臂的典型机构以及结构的选择?20?5.2.1?手臂的典型运动机构20?5.2.2?手臂运动机构的选择20?5.3?手臂直线运动的驱动力计算??20? 5.3.1?手臂摩擦力的分析与计算20?5.3.2?手臂惯性力的计算?22?5.3.3?密封装置的摩擦阻力22?5.4?液压缸工作压力和结构的确定?22?5.5?四连杆固定轴剪切力校核??23?5.6?本章小结??24?6? 机身的设计计算??25?6.1?机身的整体设计?25?6.2?机身回转机构的设计计算??26?6.3?机身升降机构的计算27?6.3.1?手臂偏重力矩的计算27?6.3.2?手臂做升降运动的液压缸驱动力的计算28?6.4?轴承的选择分析?29?6.5?齿轮的选型?29?6.6?本章小结??30?7?液压系统设计??32?7.1液压系统简介??32码垛机械手设计 V?7.2液压系统的组成?32?7.3机械手液压系统的控制回路??32?7.3.1? 压力控制回路32?7.3.2? 速度控制回路33?7.3.3?方向控制回路??33?7.4?机械手的液压传动系统?34?7.4.1?上料机械手的动作顺序34?7.4.2?自动上料机械手液压系统原理介绍?35?7.5机械手液压系统的简单计算??36?7.6?本章小结??37?8?PLC控制回路的设计38?8.1?电磁铁的动作顺序表38?8.2?根据机械手的动作顺序表??39?8.3?PLC与现场器件的实际连接图??40?8.4?梯形图??40?8.5?指令程序??42?9? 结论??45?参考文献??46?致谢47码垛机械手设计 11 绪论1.1前言用于再现人手的的功能的技术装置称为机械手。
(完整版)PLC机械手毕业设计论文

摘要机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。
机械手的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、变频器、传感器、等电子器件组成。
该装置涵盖了可编程控制技术,位置控制技术、检测技术等,是机电一体化的典型代表仪器之一。
本文介绍的机械手是由PLC输出三路脉冲,分别驱动横轴、竖轴变频器,控制机械手横轴和竖轴的精确定位,微动开关将位置信号传给PLC 主机;位置信号由接近开关反馈给PLC主机,通过交流电机的正反转来控制机械手手爪的张合,从而实现机械手精确运动的功能。
本课题拟开发的物料搬运机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。
关键词:机械手 PLC 变频器交流电机AbstractManipulator industrial robot systems traditional mandate, Robot is one of the key components. Manipulator using the mechanical structure of screw-ball, slider, and other mechanical devices composition; Electric control technology, detection technology, Mechatronics is a typical representative of one of the machines. This paper presents a manipulator by three PLC output pulse, driving , micro-switches position signal transmission will closeto the switching signal from the feedback from the mainframe to the PLC, through the exchange of Motor reversion to control the manipulator gripper Zhang, thus achieving accurate manipulator movement functions. The topics to be developed by the Manipulator grasping be upin space objects, movements flexible, diverse, canreplace the artificial conducted operations, Accordingto the workpiece can change the campaign process and the requirements of any changes to the relevant parameters.Key Words: Manipulator PLC Inverter AC motor目录摘要 (1)ABSTRACT (2)引言 (4)第一章机械手机械结构 (5)1.1传动机构 (5)1.2机械手夹持器和机座的结构 (6)第二章可编程控制PLC (8)2.1 PLC简介 (8)2.2 PLC内部原理 (10)A. 系统程序存储区 (11)B. 系统RAM存储区 (11)C.用户程序存储区 (11)2.3 PLC的工作原理 (12)2.4 PLC机型的选择方法 (15)2.6 机械手PLC选择及参数 (17)第三章三相异步电动机的工作原理及结构 (19)3.1 三相异步电动机的结构 (19)3.2 三相交流电机工作原理 (23)3.3 三相电动机的转动原理 (25)3.3 机械手电机的选用 (29)第四章变频器 (29)4.1变频器的构成 (30)4.2 变频器的分类和控制方式 (34)4.3 FR-A540变频器 (37)第五章机械手PLC控制系统设计 (40)5.1 机械手的工艺过程 (40)5.2 PLC控制系统 (42)致答谢词 (48)参考文献 (49)引言在现代工业中,生产过程的机械化、自动化已成为突出的主题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
黎明职业大学机电工程与自动化学院毕业设计毕业设计报告设计题目:机械手(码垛机)液压与PLC系统的设计与仿真目录第1章绪论 (3)第2章毕业设计任务与要求 (4)2.1设计任务 (4)2.2设计要求 (5)第3章液压系统设计 (6)3.1负载分析 (6)3.2液压缸的设计与计算 (6)3.2.1夹紧液压缸的设计与计算 (6)3.2.2升降液压缸的设计与计算 (7)3.2.3平移液压缸的设计与计算 (9)3.2.4液压缸结构尺寸计算 (10)3.3确定液压系统方案,拟定液压系统原理图 (11)3.3.1确定执行元件的类型 (11)3.3.2换向方式确定 (11)3.3.3各回路的确定 (11)3.4 液压元件及辅助装置的选型与确定 (12)3.4.1 选择液压泵 (12)3.4.2确定油管的尺寸 (12)3.4.3液压阀的选型 (13)第4章电气控制系统设计 (14)4.1控制要求分析 (14)4.2硬件设计 (14)4.2.1 PLC的选型 (14)4.2.2 I/O分配表 (15)4.2.3 PLC电路设计 (15)4.3电气元件选型 (19)4.4软件设计 (21)4.4.1画出动作流程图 (21)4.4.2人机界面组态控制 (22)第5章安装调试仿真 (26)5.1 液压仿真 (26)5.2 PLC调试 (26)第6章设计结论 (26)第7章仪器设备清单 (27)第8章收获、体会和建议 (27)参考文献 (28)附录 (29)第1章绪论机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
机械手的发展是由于它的积极作用正日益为人们所认识:其一、它能部分的代替人工操作;其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;其三、它能操作必要的机具进行焊接和装配,从而大大的改善了工人的劳动条件,显著的提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。
机械手是一种能自动控制并可从新编程以变动的多功能机器,他有多个自由度,可以搬运物体以完成在不同环境中的工作。
机械手的结构形式开始比较简单,专用性较强。
随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
第2章毕业设计任务与要求2.1设计任务图2-1 码垛机工作简图图2-2 码垛机工作平面示意图如图2-1所示利用机械手将工作台上的板砖从右边(A)搬运到左边(B),并且在左边(B)放5板砖后,板砖被送入下一自动环节。
整个过程的控制可以在触摸屏上实现.机械手处在原位(右上位),当械手检测到信号,开始下降,下降到位时夹紧板砖,检测到板砖夹紧信号开始上行,上行到上限位时机械手开始左行,左行到左限位时,机械手开始下降,下降到位机械手松开,检测到松开信号开始上升,上升到上限位,开始右行,碰到右限位回到原始位置,重复开始步骤,板砖到达左边时堆放在前一层上,堆5层后板砖被送入下一环节,机械手又从第一层开始堆放,如此循环动作。
相关参数:1块标准板砖(240x120x60)重2.8kg,每层夹36块板砖;机械手爪重500kg,其余上部部件重300kg;夹爪松开与夹紧行程是100mm,时间t=1s;升降液压缸的有效行程是1200mm,t=3s;平移液压缸的有效行程是1200mm,t=3s;传送带宽800mm,两传送带之间距离1200mm,间隔400mm;2.2设计要求1、画出液压系统原理图、电气控制原理图。
2、设计液压系统,对所有液压元件、电器元件选型。
3、编写PLC程序、设计人机界面并连接PLC在液压实验台上进行模拟。
第3章液压系统设计3.1负载分析(1)夹紧液压缸夹紧力要大于36块砖块的重力与夹爪上的橡胶之间的摩擦力,才能夹紧砖块。
(2)升降液压缸受到的负载为36块砖块产生的重力与机械手装置本身的重力总和。
(3)平移液压缸受到的负载为36块砖块产生的重力、机械手装置产生的重力和移动装置产生的重力总和。
3.2液压缸的设计与计算3.2.1夹紧液压缸的设计与计算图3-1 夹紧液压缸安装图(1)计算夹紧工作压力砖重 N砖=36×2.8kg=100.8kg查资料得知橡胶与混凝土之间的摩擦系数为0.3.若要夹紧砖块 则g m f ∙≥=砖N μFj N N ==⨯=∙≥∴33603.0108.100gm μ砖根据《液压与气动技术》第3版 张宏友主编P61 页表4-1,取工作压力Pj=1MPa 。
(2)夹紧缸有效面积,缸径,杆径 夹紧缸有效面积Aj226jj j mm 3360m 10336010613360=⨯=⨯==-NP F A夹紧缸直径Dj 为mm 4.6514.3336044jj ≈⨯==πA D取标准值Dj=70mm (根据《液压传动与控制》第2版 沈兴全编P91页表5-3)222j j mm 5.384670414.34=⨯==D A π活塞杆直径dj 为 (根据《液压与气动技术》第3版 张宏友主编P62 页表4-3)活塞杆受压力∴55.0=λ 即dj=0.55Dj=38.5mm取标准值dj=40mm (根据《液压与气动技术》第3版 张宏友主编P63 页表4-5)(3)计算夹紧缸的流量qj (夹紧时间t=1s ,行程100mm )min /8.22s /m 1038.0s 11010105.3846s 11010q 33-2-6-2-j j j j L A U A =⨯≈⨯⨯⨯=⨯==3.2.2升降液压缸的设计与计算图3-2 升降液压缸安装图(1)计算工作压力及缸径,杆径。
升降缸受到负载F=(m 砖+m )g=(100.8+500)×6008N根据《液压与气动技术》第3版 张宏友主编P61 页表4-1 取工作压力P=2MPa22d 214.360084d 4+⨯⨯=+=P F D π ①且根据《液压传动与控制》第2版 沈兴全编P91页,受拉力λ取0.5即d=0.5D ②联合①②解得 D ≈71.4mm d ≈35.7mm根据《液压与气缸技术》第3版 张宏友主编P63页表4-4表4-5,取标准值D=80mm d=40mm (2)计算升降缸流量 有效行程为1200mm 时间3s所以min /dm 240604s /mm 400s 3mm1200s =⨯===V有效面积无杆腔有效工作面积为221mm 50244==D A π活塞杆面积为223mm 1256d 4==πA有杆腔有效工作面积2312mm 3768=-=A A A确定所需流量min /4.90102403768q 421L V A S =⨯⨯=∙=- min /62.120102405024q 412L V A S =⨯⨯=∙=-3.2.3平移液压缸的设计与计算图3-3 平移液压缸安装图(1)平移液压缸受到负载为kg 8.9003005008.100m m m m =++=++=部件机械手砖总查滚动摩擦系数ų=0.02所以推力N F 16.180108.90002.0mg =⨯⨯==μ(2)根据《液压与气动技术》第3版 张宏友主编P61 页表4-1 取工作压力P=1mpa平移杆直径mm 1.151016.1804p 46p =∙⨯==ππF P根据《液压与气动技术》第3版 张宏友主编P63 页 一般长度L 不大于内径D 的20~30倍 所以 L=1200≤20D D ≥60mm根据《液压与气缸技术》第3版 张宏友主编P62页表4-4 取标准值D=63mm根据《液压与气缸技术》 第3版 张宏友主编P61页表4-3 d=0.55D=34.65mm根据《液压与气缸技术》 第3版 张宏友主编P62页表4-5 取标准值36mm平移缸有效工作面积22mm 67.31154≈=D AP π平移位移为1200mm ,时间为3s所以s /mm 400s 3mm1200p ==V即所需流量为min/76.74s /mm 124626667.3115400q 3p p p L A V ==⨯=∙=3.2.4液压缸结构尺寸计算根据《液压传动与控制》第2版 沈兴全编P93得知图3-4 液压缸结构尺寸图A:导向套滑动面长度;B:活塞支承面宽度;C:隔套长度;D:缸筒直径; H:最小导向长度; L:最大行程;(1)夹紧液压缸:L=100mm ;D=40mm ;H=L/20+D/2=60mm ;A=(0.6~1.6)D=40mm;B=(0.6~1)D=40mm ;C=H-0.5*(A+B)=20mm;(2)升降液压缸:L=1200mm;D=80mm;H=L/20+D/2=100mm;A=(0.6~1.6)D=40mm;B=(0.6~1)D=80mm;C=H-0.5*(A+B)=40mm;(3)平移液压缸:L=1200mm;D=63mm;H=L/20+D/2=100mm;A=(0.6~1.6)D=60mm;B=(0.6~1)D=60mm;C=H-0.5*(A+B)=40mm;3.3确定液压系统方案,拟定液压系统原理图3.3.1确定执行元件的类型根据本设计的特点要求及结构的考虑,执行元件采用单杠式活塞液压缸。
3.3.2换向方式确定为了便于在任意位置停止,使调整方便,同时为了防止突然断电时夹紧砖块的机械爪突然松开,采用三位换向阀。
3.3.3各回路的确定(1)升降回路中为了防止工件受本身的重力的影响自动下降,在下降回路中加上液控单向阀,防止自重下降。
(1)夹紧回路所需的压力低于进给系统压力,所以在供油回路中串接一个减压阀。
同时为了防止主系统压力下降时影响夹紧系统的压力,所以在减压阀后串接一个单向阀。
同时在夹紧回路进油回路加一个液控单向阀。
(3)在升降系统回路与平移系统回路中进油回路、出油回路都串接上单向节流阀,控制回路流量。
(4)为了减少换向阀的使用,每两个夹紧回路由一个换向阀控制,回路就要使用分流阀,主系统回路与四个系统回路之间也是使用分流阀。
根据设计要求及以上分析,绘出液压系统原理图如下。
图3-5 液压系统原理图3.4 液压元件及辅助装置的选型与确定3.4.1 选择液压泵泵的的工作压力由缸的工作压力与管件及阀压力损失来确定,假设压力损失为Σ△P=1MP,所以泵工作压力为Pb=P+Σ△P=3MP。
K为系统的泄漏系数,一般取K=1.1-1.3,则泵的流量为q=Kq2=1.3X120.62L/min=156.78L/min根据《液压元件及选用》王守城主编 P7 表2.1选择CB3063型齿轮泵。
3.4.2确定油管的尺寸根据《液压传动与控制》第2版沈兴全编P124 表6-9,结合各个管道的特点和适用场合,选用尼龙管,承压为2.8MP-8MP。