步进电机调速控制程序
大学毕业设计 C51程序控制步进电机

题目:简易步进电机控制步进电机控制摘要:本设计采用ATMEL公司DIP-40封装的AT89S52单片机实现对四相步进电机的手动和按键控制。
由单片机产生的脉冲信号经过分配后分解出对应的四相脉冲,分解出的四相脉冲经驱动电路功率放大后驱动步进电机的转动。
转速的调节和状态的改变由按键进行选择,此过程由程序直接进行控制。
通过键盘扫描把选择的信息反馈给单片机,单片机根据反馈信息做出相应的判断并改变输出脉冲的频率或转动状态信号。
电机转动的不同状态由液晶LCD1602显示出来。
而设计的扩展部分可以通过红外信号的发射由另一块单片机和红外线LED完成,用红外万能接收头接收红外信号,可以实现对电机的控制进行红外遥控。
关键字:四相步进电机单片机功率放大 LCD1602步进电机控制 (1)摘要 (1)关键字 (1)前言 (3)1系统总体方案设计及硬件设计 (4)1.1步进电机 (4)1.1.1 步进电机的种类 (4)1.1.2 步进电机的特点 (4)1.1.3 步进电机的原理 (5)1.2 控制系统电路设计 (7)1.3 液晶显示LCD1602 (7)1.4 AT89S52核心部件及系统SCH原理图 (9)1.5 LN2003A驱动 (10)2软件设计及调试 (13)2.1程序流程 (13)2.2软件设计及调试 (14)3 扩展功能说明 (15)4设计总结 (16)5 设计源程序 (16)6 附录 (21)参考文献 (22)附2:系统原理图及实物图 (23)步进电机广泛应用于对精度要求比较高的运动控制系统中,如机器人、打印机、软盘驱动器、绘图仪、机械阀门控制器等。
目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。
分散器件组成的环形脉冲分配器体积比较大,同时由于分散器件的延时,其可靠性大大降低;软件环形分配器要占用主机的运行时间,降低了速度;专用集成芯片环形脉冲分配器集成度高、可靠性好,但其适应性受到限制,同时开发周期长、需求费用较高。
步进电机的控制程序

mega16的,16和32管脚兼容,只不过flash大小不一样,不过中断向量号也不一样,你看下自己改改。
时钟频率:内部RC 1M 芯片:ULN2003 键值:0 小角度快正转。
1 小角度快倒。
2 大角度快转。
3 大角度快倒。
4 小角度正慢转。
5 小角度倒慢转。
6 大角度正慢转。
7 大角度倒慢转。
********************************************************************/#include<iom16v.h>#include <macros.h>#define uchar unsigned char#define uint unsigned intuchar a=0,b=0;uchar KEY_num=0xe1;unsigned int m=9000;const uchar f1[]={0x02,0x06,0x04,0x0c,0x08,0x09,0x01,0x03}; //正转时序3.75度const uchar f2[]={0x04,0x06,0x02,0x03,0x01,0x09,0x08,0x0c}; //倒转时序3.75度const uchar f3[]={0x01,0x02,0x04,0x08}; //正转时序7.5度const uchar f4[]={0x01,0x08,0x04,0x02}; //倒转时序7.5度void delay(int k) //延时{ int i; for(i=0;i<k;i++); }void delay_10ms(uint data){ uint m=2; while(data) { data--; m=2; while(m)m--; } }void zhengzhuan1(void) //正转3.75度{ unsigned char j; for (j=0;j<8;j++) { PORTC=f1[j]; delay(m); } }void daozhuan1(void) //倒转3.75度{ unsigned char j; for (j=0;j<8;j++) { PORTC=f2[j]; delay(m); } }void zhengzhuan2(void) //正转7.5度{ unsigned char j; for (j=0;j<4;j++) { PORTC=f3[j]; delay(m); } }void daozhuan2(void) //倒转7.5度{ unsigned char j; for (j=0;j<4;j++) { PORTC=f4[j]; delay(m); } }void port_int() //初始化端口{ PORTB = 0xf0; DDRB = 0x0F; DDRC=0xff; PORTC=0x01; }void init_devices(void){ CLI(); //禁止所有中断MCUCR = 0x00; MCUCSR = 0x80;//禁止JTAG GICR = 0x00; port_int();SEI();//开全局中断}//按键键值读取程序//返回按键键值,如果没有按键则返回0.void KYY_read(){ //定义按键值存放内存PORTB=0xf0; //行全部送高电平PORTB=0xf0;if((PINB&0xf0)!=0xf0) //有按键{ delay_10ms(1);//延时消抖if((PINB&0xf0)!=0xf0) //确定有按键按下{ PORTB=0xfe; //扫描第一行PORTB=0xfe;if((PINB&0xf0)!=0xf0){ KEY_num=(PINB&0xf0)+1; a=9; }PORTB=0xfd; //扫描第二行PORTB=0xfd;if((PINB&0xf0)!=0xf0){ KEY_num=(PINB&0xf0)+2; } PORTB=0xfb; //扫描第三行PORTB=0xfb;if((PINB&0xf0)!=0xf0){ KEY_num=(PINB&0xf0)+4; } PORTB=0xf7; //扫描第四行PORTB=0xf7;if((PINB&0xf0)!=0xf0){ KEY_num=(PINB&0xf0)+8; } } } //没有按键返回0 }//按键执行程序//送如参数:按键键值KEY_do(uchar data){ uchar KEY_number=data;switch(KEY_number){ case 0xe1:a=0;b=0;daozhuan1();m=5000;break;case 0xd1:a=0;b=1;daozhuan1();m=6000;break;case 0xb1:a=0;b=2;daozhuan1();m=7000;break;case 0x71:a=0;b=3;daozhuan1();m=8000;break;case 0xe2:a=0;b=4;daozhuan2();m=5000;break;case 0xd2:a=0;b=5;daozhuan2();m=6000;break;case 0xb2:a=0;b=6;daozhuan2();m=7000;break;case 0x72:a=0;b=7;daozhuan2();m=8000;break;case 0xe4:a=0;b=8;zhengzhuan1();m=5000;break;case 0xd4:a=0;b=9;zhengzhuan1();m=6000;break;case 0xb4:a=1;b=0;zhengzhuan1();m=7000;break;case 0x74:a=1;b=1;zhengzhuan1();m=8000;break;case 0xe8:a=1;b=2;zhengzhuan2();m=5000;break;case 0xd8:a=1;b=3;zhengzhuan2();m=6000;break;case 0xb8:a=1;b=4;zhengzhuan2();m=7000;break;case 0x78:a=1;b=5;zhengzhuan2();m=8000;break; default:b=0;break;}}void main (void)//主程序{ init_devices();while(1){ KYY_read(); KEY_do(KEY_num); }}#include <reg51.h> //51芯片管脚定义头文件#include <intrins.h> //内部包含延时函数_nop_();#define uchar unsigned char#define uint unsigned intuchar code FFW[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9}; uchar code REV[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1};sbit K1 = P3^4; //正转sbit K2 = P3^5; //反转sbit K3 = P3^6; //停止sbit K4 = P3^7;sbit BEEP = P0^6; //蜂鸣器/********************************************************//*/* 延时t毫秒/* 11.0592MHz时钟,延时约1ms/*/********************************************************/void delay(uint t){uint k;while(t--){for(k=0; k<125; k++){ }}}/**********************************************************/void delayB(uchar x) //x*0.14MS{uchar i;while(x--)for (i=0; i<13; i++){ }}}/**********************************************************/ void beep(){uchar i;for (i=0;i<180;i++){delayB(5);BEEP=!BEEP; //BEEP取反}BEEP=1; //关闭蜂鸣器}/********************************************************/ /*/*步进电机正转/*/********************************************************/ void motor_ffw(){uchar i;uint j;for (j=0; j<12; j++) //转1*n圈{if(K4==0){break;} //退出此循环程序for (i=0; i<8; i++) //一个周期转30度{P0 = FFW[i]; //取数据delay(15); //调节转速}}}/********************************************************/ /*/*步进电机反转/********************************************************/ void motor_rev(){uchar i;uint j;for (j=0; j<12; j++) //转1×n圈{if(K4==0){break;} //退出此循环程序for (i=0; i<8; i++) //一个周期转30度{P0 = REV[i]; //取数据delay(15); //调节转速}}}/********************************************************** 主程序**********************************************************/main(){uchar r,N=5; //N 步进电机运转圈数P2=0xDF;while(1){if(K1==0){beep();for(r=0;r<N;r++){motor_ffw(); //电机正转if(K4==0){beep();break;} //退出此循环程序}}else if(K2==0){beep();for(r=0;r<N;r++){motor_rev(); //电机反转if(K4==0){beep();break;} //退出此循环程序}}elseP0 = 0xf0;}}/********************************************************/ULN2803是8路NPN达林顿连接晶体管系列,特别适用于低逻辑电平数字电路,如:TTL,COMS或PMOS/NMOS,和较高的电压/电流要求之间的接口,广泛应用与计算机、打印机、继电器、灯等类似负载中。
步进电机2相驱动控制方向与速度程序代码

步进电机2相驱动控制方向与速度程序代码以下是一个示例的步进电机2相驱动控制方向与速度的程序代码:```pythonimport RPi.GPIO as GPIOimport time# 定义步进电机引脚IN1 = 11 # 输入1IN2 = 12 # 输入2IN3 = 13 # 输入3IN4 = 15 # 输入4# 设置GPIO模式为BOARDGPIO.setmode(GPIO.BOARD)# 设置步进电机引脚为输出GPIO.setup(IN1, GPIO.OUT)GPIO.setup(IN2, GPIO.OUT)GPIO.setup(IN3, GPIO.OUT)GPIO.setup(IN4, GPIO.OUT)# 定义步进电机旋转函数def rotate(delay, steps, clockwise=True):# 声明步进电机转动模式coil_A = [1, 0, 0, 1]coil_B = [0, 1, 1, 0]steps_per_rev = 4if not clockwise:steps = -stepsfor _ in range(steps):for i in range(4):# 设置步进电机输出状态GPIO.output(IN1, coil_A[i])GPIO.output(IN2, coil_B[i])GPIO.output(IN3, coil_A[steps_per_rev - i - 1])GPIO.output(IN4, coil_B[steps_per_rev - i - 1])# 延迟一定时间time.sleep(delay)# 控制步进电机旋转try:while True:rotate(0.01, 200, True) # 按顺时针方向旋转200步 time.sleep(1) # 停顿1秒rotate(0.01, 200, False) # 按逆时针方向旋转200步 time.sleep(1) # 停顿1秒except KeyboardInterrupt:GPIO.cleanup()```。
c语言实现单片机控制步进电机加减速源程序
C 语言实现单片机控制步进电机加减速源程序1. 引言在现代工业控制系统中,步进电机作为一种常见的执行元件,广泛应用于各种自动化设备中。
而作为一种常见的嵌入式软件开发语言,C 语言在单片机控制步进电机的加减速过程中具有重要的作用。
本文将从单片机控制步进电机的加减速原理入手,结合 C 语言的编程技巧,介绍如何实现单片机控制步进电机的加减速源程序。
2. 单片机控制步进电机的加减速原理步进电机是一种能够精确控制角度的电机,它通过控制每个步骤的脉冲数来实现旋转。
在单片机控制步进电机的加减速过程中,需要考虑步进电机的加速阶段、匀速阶段和减速阶段。
在加速阶段,需要逐渐增加脉冲的频率,使步进电机的转速逐渐增加;在匀速阶段,需要保持恒定的脉冲频率,使步进电机以匀速旋转;在减速阶段,需要逐渐减小脉冲的频率,使步进电机的转速逐渐减小。
这一过程需要通过单片机的定时器和输出控制来实现。
3. C 语言实现步进电机加减速的源程序在 C 语言中,可以通过操作单片机的 GPIO 来控制步进电机的旋转。
在编写源程序时,需要使用单片机的定时器模块来生成脉冲信号,以控制步进电机的旋转角度和速度。
以下是一个简单的 C 语言源程序,用于实现步进电机的加减速控制:```c#include <reg52.h>void main() {// 初始化定时器// 设置脉冲频率,控制步进电机的加减速过程// 控制步进电机的方向// 控制步进电机的启停}```4. 总结与回顾通过本文的介绍,我们了解了单片机控制步进电机的加减速原理和 C 语言实现步进电机加减速源程序的基本思路。
掌握这些知识之后,我们可以更灵活地应用在实际的嵌入式系统开发中。
在实际项目中,我们还可以根据具体的步进电机型号和控制要求,进一步优化 C 语言源程序,实现更加精准和稳定的步进电机控制。
希望本文能为读者在单片机控制步进电机方面的学习和应用提供一定的帮助。
5. 个人观点与理解在我看来,掌握 C 语言实现单片机控制步进电机加减速源程序的技术是非常重要的。
单片机步进电机控制程序代码

单片机步进电机控制程序代码引言:步进电机是一种常见的电机类型,它具有准确的位置控制和高速运动的特点,在许多应用中被广泛使用。
为了实现步进电机的精确控制,我们需要编写相应的单片机控制程序代码。
本文将介绍一种常见的单片机步进电机控制程序代码,并详细解析其实现原理和使用方法。
一、控制原理:步进电机通过控制电流的方向和大小来控制转子的运动,常见的步进电机控制方式有两相和四相控制。
本文将以四相控制为例进行介绍。
四相控制是指通过控制四个线圈的电流状态来控制步进电机的运动。
具体控制方式有全步进和半步进两种。
全步进模式下,每一步都是四个线圈中的两个同时激活;半步进模式下,每一步都是四个线圈中的一个或两个同时激活。
在本文中,我们将介绍半步进模式的控制程序代码。
二、程序代码:下面是一段常见的单片机步进电机控制程序代码:```c#include <reg51.h>sbit A1 = P1^0;sbit A2 = P1^1;sbit B1 = P1^2;sbit B2 = P1^3;void delay(unsigned int t){unsigned int i, j;for (i = 0; i < t; i++)for (j = 0; j < 120; j++);}void main(){unsigned int i;unsigned char step[8] = {0x01, 0x03, 0x02, 0x06, 0x04, 0x0C, 0x08, 0x09};while (1){for (i = 0; i < 8; i++){P1 = step[i];delay(1000);}}}```三、代码解析:1. 引用头文件reg51.h,该头文件定义了单片机51的寄存器等相关信息。
2. 定义了四个IO口A1、A2、B1、B2,分别对应步进电机的四个线圈。
3. 定义了一个延时函数delay,用于控制电机转动的速度。
单片机步进电机控制程序代码

单片机步进电机控制程序代码近年来,随着科技的不断发展,单片机步进电机控制技术在各个领域得到了广泛应用。
单片机步进电机控制程序代码是实现步进电机控制的关键,本文将介绍该代码的基本原理和实现方法。
一、步进电机控制基本原理步进电机是一种将电脉冲信号转换为角位移的电机。
它具有精准定位、高转矩、低噪音等优点,因此被广泛应用于各种设备中。
步进电机控制的基本原理是通过给步进电机提供一系列的脉冲信号,使其按照一定的步进角度旋转。
而单片机则是控制步进电机的核心部件,通过编写控制程序代码来实现对步进电机的控制。
二、单片机步进电机控制程序代码实现方法1. 硬件连接在编写单片机步进电机控制程序代码之前,我们首先需要完成硬件的连接。
一般来说,步进电机的控制需要使用到驱动模块,如ULN2003或者A4988等。
我们需要将单片机的输出引脚与驱动模块的输入引脚相连接,同时将驱动模块的输出引脚与步进电机的控制引脚相连接。
2. 编写控制程序代码接下来,我们可以开始编写单片机步进电机控制程序代码了。
以C 语言为例,下面是一个简单的步进电机正转程序代码示例:```c#include <reg52.h>sbit IN1 = P1^0;sbit IN2 = P1^1;sbit IN3 = P1^2;sbit IN4 = P1^3;void delay(unsigned int t) {unsigned int i, j;for(i = 0; i < t; i++)for(j = 0; j < 120; j++);}void main() {while(1) {IN1 = 1;IN2 = 0;IN3 = 1;IN4 = 0;delay(50);IN1 = 0;IN2 = 1;IN3 = 1;IN4 = 0;delay(50);IN1 = 0;IN2 = 1;IN3 = 0;IN4 = 1;delay(50);IN1 = 1;IN2 = 0;IN3 = 0;IN4 = 1;delay(50);}}```上述代码中,我们通过控制P1口的四个引脚来控制步进电机的旋转方向。
西门子三轴步进电机控制程序

西门子三轴步进电机控制程序以下是一个基本的西门子三轴步进电机控制程序的示例:```Python# 导入所需的模块from pyModbusTCP.client import ModbusClientimport time# 设置Modbus TCP服务器的IP地址和端口号server_ip = '192.168.1.100'server_port = 502# 创建Modbus客户端对象client = ModbusClient(host=server_ip, port=server_port, auto_open=True)# 检查连接状态if not client.is_open():print("无法连接到Modbus TCP服务器")exit()# 定义电机轴的地址axis1_address = 0x0000axis2_address = 0x0001axis3_address = 0x0002# 定义电机的参数speed = 100 # 速度(步数/秒)acceleration = 100 # 加速度(步数/秒^2)deceleration = 100 # 减速度(步数/秒^2)try:# 启动轴client.write_single_register(axis1_address + 1, acceleration) # 设置加速度client.write_single_register(axis1_address + 2, deceleration) # 设置减速度client.write_single_register(axis1_address + 3, speed) # 设置速度client.write_single_register(axis1_address + 4, 1) # 启动轴# 等待轴到达目标位置while client.read_single_register(axis1_address + 5) != 1:time.sleep(0.1) # 等待0.1秒# 停止轴client.write_single_register(axis1_address + 4, 0) # 停止轴# 关闭连接client.close()except Exception as e:print("发生错误:", str(e))client.close()```请注意,这只是一个基本的示例,具体的控制逻辑和参数设置需要根据实际情况进行调整。
PLC如何控制步进电机

PLC如何控制步进电机PLC(可编程逻辑控制器)是一种广泛应用于工业自动化领域的控制设备,通过输入/输出模块对各种机电设备进行控制。
在PLC系统中,步进电机是常见的执行元件之一,它具有准确的位置控制和高的加减速性能。
本文将介绍PLC如何控制步进电机,包括步进电机的驱动方式、PLC的控制原理及步进电机控制的程序设计。
一、步进电机的驱动方式1.串行通信驱动方式:步进电机通过串行通信驱动方式与PLC进行通信和控制。
首先,将PLC与串行通信模块相连,通过串行通信模块与步进电机控制器进行通信。
PLC通过串行通信模块发送指令,步进电机控制器接收指令后控制步进电机运动。
2.并行通信驱动方式:步进电机通过并行通信驱动方式与PLC进行通信和控制。
与串行通信驱动方式类似,首先将PLC与并行通信模块相连,通过并行通信模块与步进电机控制器进行通信。
PLC通过并行通信模块发送指令,步进电机控制器接收指令后控制步进电机运动。
3.脉冲驱动方式:步进电机通过脉冲驱动方式与PLC进行通信和控制。
在脉冲驱动方式中,需要PLC输出脉冲信号控制步进电机。
通常情况下,PLC将脉冲信号传递给步进电机驱动器,在驱动器中产生相应的控制信号,实现对步进电机的控制。
二、PLC的控制原理PLC作为控制器,一般采用扫描运行方式。
其运行原理如下:1.输入信号读取:PLC将外部输入信号输入到输入模块中,采集输入信号,并将其从输入模块传递给中央处理器(CPU)进行处理。
2. 程序执行:CPU根据事先编写好的程序进行处理,包括数据处理、逻辑运算和控制计算等。
PLC程序一般采用ladder diagram(梯形图)进行编写。
3.输出信号控制:根据程序的执行结果,CPU将处理好的数据通过输出模块发送给外部设备,用于控制和操作外部设备。
三、步进电机控制的程序设计步进电机的控制程序主要包括参数设定、模式选择、起停控制、运动控制等部分。
下面以一个简单的例子来说明步进电机控制的程序设计过程:1.参数设定:首先需要设定步进电机的一些参数,如电机型号、步距角度、运动速度等。
PLC实现步进电机正反转和调速控制

PLC实现步进电机正反转和调速控制PLC(可编程逻辑控制器)是一种专门用于工业自动化控制系统的计算机控制设备。
它可以实现对多种设备和机器的控制,包括步进电机。
步进电机是一种通过步进角度来控制转动的电机,其转动可以精确地控制在每个步进角度停留一段时间。
步进电机的正反转和调速控制是实现工业自动化过程中常用的功能,PLC可以很好地实现这些控制。
一、步进电机的正反转控制步进电机的正反转控制是通过控制步进电机的相序来实现的。
步进电机有多种相序方式,常见的包括正向旋转、逆向旋转、双向旋转等。
PLC 可以通过控制步进电机的相序开关来实现步进电机的正反转。
在PLC中,可以使用PLC的输出口来控制步进电机的相序开关。
通过将输出口与步进电机的控制线路连接,可以控制相序开关的状态,从而控制步进电机的正反转。
例如,将PLC的一个输出口连接到步进电机的CW (Clockwise)输入线路,另一个输出口连接到步进电机的CCW(Counter Clockwise)输入线路,可以通过控制这两个输出口的状态来实现步进电机的正反转。
二、步进电机的调速控制步进电机的调速控制是通过控制步进电机的脉冲频率来实现的。
步进电机的转速与脉冲频率成正比,脉冲频率越高,步进电机的转速越快。
因此,通过控制PLC输出口给步进电机发送的脉冲频率,可以实现步进电机的调速控制。
在PLC中,可以使用定时器模块来控制步进电机的脉冲频率。
定时器模块可以通过设定计时器的定时时间和周期,来控制输出口的脉冲频率。
通过控制定时器的定时时间,可以控制步进电机每个步进角度的停留时间,从而控制步进电机的转速。
除了定时器模块,PLC还可以使用计数器模块来实现步进电机的调速控制。
计数器模块可以通过设定计数器的初始值和计数步长,来控制输出口的脉冲频率。
通过控制计数器的初始值和计数步长,可以控制步进电机每个步进角度的停留时间,从而实现步进电机的转速控制。
三、步进电机正反转和调速控制实例以下是一个使用PLC实现步进电机正反转和调速控制的实例。
步进电机调速控制系统设计C语言程序及说明

步进电机调速控制系统设计C语言程序及说明使用元器件:单片机8051、步进电机17H185H-04A、128细分/3.0A步进电机驱动器、LED显示器。
实现控制功能:以8051单片机为控制器,系统设四个按键:“工作/停止按键"、“加速按键”、“减速按键”、“正反向控制按键”。
系统上电后,按下“正反向控制按键",控制电机正反转;每按一次“加速按键”后,步进电机由低向高加速一级,每按一次“减速按键”后,由高向低减速一级;按“工作/停止按键"后,电机停止转动,系统回到等待状态。
同时需要显示运行状态和转速(以实际转速或等级表示).程序清单及说明#include<reg52。
h>sbit EN=P2^0; //使能输出sbit DIR=P2^1; //方向控制sbit PWM=P2^2;//PWM输出sbit zled=P2^6;//正转信号灯sbit fled=P2^7;//反转信号灯sbit sw1=P0^0;//启停按钮sbit sw2=P0^1;//正反转按钮sbit sw3=P0^2;//加速按钮sbit sw4=P0^3;//减速按钮unsigned char table[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};unsigned char i,j,k,temp=0,zkb=5,zkb1=0,speed=0;void delay()//延时10ms{for(i=20;i>0;i--)for(j=248;j〉0;j--);}void InitTimer0(void) //T0定时器初始化{TMOD = 0x00; //设置定时器方式0TH0 = 0xef;//高8位送初值TL0 = 0xdd; //低8位送初值EA = 1; //开中断总允许ET0 = 1;//开T0中断允许TR0 = 1; //启动T0开始定时}void main() //主程序{InitTimer0();EN=1; //初始使能端输出0DIR=1;//方向端输出1zled=0;//正传信号灯端口输出0,灯亮fled=1;//反转信号灯输出1,灯不亮while(1){P1=table[speed];//启停if(sw1==0)//判断启停键按下{delay(); //调用延时程序if(sw1==0)//再判断,启停键按下{while(sw1==0);//启停键按下,使能端取反EN=~EN;}}//正反转子程序if(sw2==0) //判断换向键是否按下{delay();if(sw2==0){while(sw2==0);DIR=~DIR; //换向键按下,方向端口取反fled=~fled; //正传指示灯控制端取反zled=~zled;//反转传指示灯控制端取反}}//加速子程序if(sw3==0) //判断加速键是否按下{delay();if(sw3==0){while(sw3==0); //加速键按下if(speed>=5)//判断转速是否大于5 speed=5; //大于5,保持5级转速elsespeed++;//小于5,加速一级}}//减速子程序if(sw4==0) //判断减速键是否按下{delay();if(sw4==0){while(sw4==0);//减速键按下if(speed==1) //转速为1,保持1级转速speed=1;elsespeed—-; //转速不为1,减速1级}}}}void Timer0Interrupt(void) interrupt 1switch(speed)//加减速按键按下,对应选择T0初值,进入终端产生不同频率脉冲{case 1:TH0=0XDD;break;case 2:TH0=0XE1;break;case 3:TH0=0XE5;break;case 4:TH0=0XEa;break;case 5:TH0=0xf0;break;}TL0 = 0xdd;if(zkb1〉=10)zkb1=0;zkb1++;if(zkb1〈=5)PWM=1;elsePWM=0;}。
PLC实现步进电机的正反转及调整控制

PLC实现步进电机的正反转及调整控制PLC(可编程逻辑控制器)可以广泛应用于工业自动化控制系统中,包括步进电机的正反转及调整控制。
本文将详细介绍如何使用PLC实现步进电机的正反转及调整控制。
一、步进电机的原理步进电机是一种用电脉冲驱动的电动机,它是按固定顺序将电流导通到电动机的相绕组中,从而使电动机按步进的方式转动。
步进电机有两种基本的工作模式:全步进和半步进。
在全步进模式下,电机每接收到一个脉冲就向前转动一个固定的步距角度。
在半步进模式下,电机接收到一个脉冲时向前转动半个步距角度。
二、PLC实现步进电机的正反转1.硬件连接将PLC的输出端口与步进电机的驱动器相连,将驱动器的控制信号输出口与步进电机相连。
确保电源连接正确,驱动器的供电电压要符合步进电机的额定电压。
2.编写PLC程序使用PLC编程软件编写PLC程序来控制步进电机的正反转。
以下是一个简单的PLC程序示例:```BEGINMOTOR_CONTROL_TRIG:=FALSE;//步进电机控制信号MOTOR_DIRECTION:=FORWARD;//步进电机转动方向,FORWARD表示正转,REVERSE表示反转//步进电机正转控制MOTOR_FORWARD:IF(START_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=TRUE;MOTOR_DIRECTION:=FORWARD;END_IF;//步进电机反转控制MOTOR_REVERSE:IF(STOP_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=TRUE;MOTOR_DIRECTION:=REVERSE;END_IF;//步进电机停止控制MOTOR_STOP:IF(STOP_BUTTON=TRUE)THENMOTOR_CONTROL_TRIG:=FALSE;END_IF;END```Begitalogic Flowcode是PLC编程软件之一,提供了简单易懂的图形界面来编写PLC程序。
步进电机调速系统

步进电机调速系统一.设计目的1.掌握步进电机的工作原理及控制方法2.了解控制步进电机转速的原理3.进一步掌握微机接口中的相关知识4.熟悉设计系统的方法二.设计要求1.以8086极其支持电路为基础,配必要的存储器、定时系统、控制接口、驱动电路、LED显示接口等构成微机控制的电机调速系统。
2.对步进电机的工作原理进行分析,通过“启、停、转速”等按键命令,实现对电机的平稳启动、停止和不同速率上的匀速转动,并通过LED显示转速;3.方案设计中要突出信号的变换、驱动电路的设计和步进电机控制程序的编制;三.设计思路(1)步进电机基本原理所谓步进,就是指每给步进电机一个递进脉冲,步进电机各绕组的通电顺序就改变一次,电机就回转动一次。
使用键盘控制方式能对步进电机的转动方向、速度和角度进行调节。
(2)步进电机激励方式步进电机有三相激励,也有四相激励的。
现以两相四拍为例说明。
2相激励。
这种方式的工作波形如图所示。
它可看作是一种周期信号,每个周期可以为四个状态。
显然,任何时刻步进电机都有两相绕组有电流。
每一状态,步进电机走一步。
四.设计内容1.程序流程图2. 源程序P8255_A EQU 9800HP8255_B EQU 9801HP8255_C EQU 9802HP8255_MODE EQU 9803HDELAY_SET EQU 07FH ;延时常数MY_STACK SEGMENT PARA 'STACK'DB 100 DUP(?)MY_STACK ENDSMY_DATA SEGMENT PARA 'DATA'BUF DB ?KVL DB 2 DUP(?) ;击键次数备份,键值PT DB ? ;显示缓冲区指针DSBUF DB 4 DUP(?) ;显示缓冲区KD DB ? ;数码管数据信号KH DB ? ;键盘行信号KL DB ? ;键盘列信号、数码管位选信号KV A DB ? ;键值备份KVB DB ? ;在闪烁子程序中保存显示器原有的数据COUNT2 DB ? ;击键次数COUNT4 DB ? ;连续击键次数KTB DB 48H ;0 键码DB 44H ;1DB 34H ;2DB 24H ;3DB 42H ;4DB 32H ;5DB 22H ;6DB 41H ;7DB 31H ;8DB 21H ;9DB 11H ;ADB 12H ;BDB 14H ;CDB 18H ;DDB 28H ;EDB 38H ;FDB 00H ;10SGTB DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82HDB 0F8H,80H,90H,88H,83H,0C6H,0A1HDB 86H,8EH,0FFH,8CH,89H,8EH,0BFH,0F7H; CHAR DB 'MY_DATA ENDsMY_CODE SEGMENT PARA 'CODE'MY_PROC PROC FARASSUME CS:MY_CODE, DS:MY_DATA, SS:MY_STACK START: MOV AX,MY_DATAMOV DS,AXSSS: MOV DX,P8255_MODEMOV AL,81H ;写8255控制字A、B输出,C输入OUT DX,ALSTART1: MOV BX,OFFSET DSBUFMOV PT,BLMOV DSBUF,15H ;_MOV DSBUF+1,10H ;空格MOV DSBUF+2,10HMOV DSBUF+3,10H;START2: CALL BLINK3 ;键盘扫描、显示子程序、光标闪动START3: CALL CHAG ;转数字键处理程序; CALL DELAYJMP START2 ;转下一轮处理程序MY_PROC ENDpCHAG PROC NEARMOV BH,00HMOV BL,PTMOV AL,COUNT4MOV [BX],AL ;键值送到显示缓冲区中CMP BL,OFFSET [DSBUF+3]JNZ CHAG2mov BL,OFFSET DSBUFMOV PT,BLCHAG1: RETCHAG ENDpCHAG2: INC BLMOV PT,BLJMP CHAG1BLINK PROC NEARMOV CX,100H ;熄灭显示器时间常数MOV BH,00HMOV BL,PTMOV Al,[BX]MOV KVB,AL;保存原显示器数据MOV AL,10H ;填入熄灭显示器的码MOV [BX],ALBLINK1: CALL DSKS ;键盘扫描BLINK2: CMP COUNT4,10HJNZ BLINK6 ;键按下返回LOOP BLINK1 ;没键按下继续循环MOV AL,KVBMOV BL,PTMOV [BX],ALBLINK3: MOV CX,150H ;点亮显示器时间常数BLINK4: CALL DSKSBLINK5: CMP COUNT4,10HJNZ BLINK7 ;键按下返回LOOP BLINK4 ;没键按下继续循环JMP BLINKBLINK6: MOV AL,KVB ;恢复原显示器中的数据MOV BL,PTMOV [BX],ALBLINK7: RETBLINK ENDpDSKS PROC NEAR ;键盘扫描处理程序PUSH CXCALL DSUP ;显示CALL KBS ;键盘扫描MOV AL,KVL+1 ;取上次按键键值CMP KV A,AL ;与本次键值相比MOV AL,KVL ;按键次数MOV COUNT2,ALMOV AL,KVLMOV COUNT4,ALJZ DSKS1MOV COUNT2,0FFH ;不相等,重新赋值MOV COUNT4,0FFHDSKS1: DEC COUNT4CMP COUNT4,0F8H ;为E0?JZ DSKS3CMP COUNT4,0EH ;为0E?JZ DSKS3CMP COUNT4,00H ;为00?JZ DSKS2MOV COUNT4,10H ;赋值DEC COUNT2JMP DSKS4DSKS2: MOV COUNT4,0fH ;按下键时间足够长则为连续击键DSKS3: MOV AL,COUNT4MOV COUNT2,ALMOV AL,KV AMOV COUNT4,ALDSKS4: MOV AL,COUNT2MOV KVL,ALMOV AL,KV AMOV KVL+1,AL ;备份键值MOV AL,COUNT4POP CXRETDSKS ENDpDSUP PROC NEARPUSH CXMOV CX,04H ;显示器个数MOV KL,01H ;选中的显示器MOV BX,OFFSET DSBUFDSUP2: MOV AL,00HMOV DX,P8255_B ;关闭显示器OUT DX,ALMOV AL,[BX] ;取显示缓冲区中的数据PUSH BXMOV AH,00HMOV DI,AXMOV BX,OFFSET SGTB ;编码MOV AX,[BX+DI]MOV AH,00HPOP BXMOV DX,P8255_A ;送显示器显示OUT DX,ALINC BXMOV AL,KLMOV DX,P8255_B ;送位选信号OUT DX,ALROL AL,1MOV KL,ALCALL DELAY ;下一位PUSH CXMOV CX,-1LOOP $POP CXLOOP DSUP2POP CXMOV AL,00HMOV DX,P8255_B ;关闭显示器OUT DX,ALRETDSUP ENDpKBS PROC NEAR ;键盘扫描程序MOV DX,P8255_A ;清显示器MOV AL,0FFHOUT DX,ALMOV CX,04H ;送列数MOV KL,0FEH ;扫描列初始值KBS1: MOV AL,KLMOV DX,P8255_B ;逐列清零OUT DX,ALSAL AL,1MOV KL,ALMOV DX,P8255_C ;读行信号IN AL,DXNOT ALAND AL,0FHCMP AL,00H ;是否有键按下JNZ KBS2LOOP KBS1 ;没键扫描下一列KBS2: CMP AL,0C0HJMP K0CMP AL, 0F9HJMP K1CMP AL, 0A4HJMP K2CMP AL ,0B0HJMP DSUP2K0:MOV BL,18HCALL DELAYMOV AL,BUFROR AL,1MOV BUF,ALJMP DSUP2K1:MOV BL,20HCALL DELAYMOV AL,BUFROL AL,1MOV BUF,ALJMP DSUP2K2:MOV BL,30HCALL DELAYMOV AL,BUFROR AL,1MOV BUF,ALJMP DSUP2MOV BX,CXMOV CX,04H ;拼装键号SAL BX,CLMOV CX,BXOR AL,CLMOV KV A,ALMOV DI,10H ;键盘个数MOV BX,OFFSET KTBKBS3: MOV AL,[BX+DI]CMP AL, KV A ;计算键值,无键按下返回00HJNZ KBS5KBS4: MOV AX,DIMOV KV A,AL ;保存键值CALL BREAKRETKBS5: DEC DIMOV AX,DICMP AL,00HJNZ KBS3JMP KBS4KBS ENDpDELAY PROC NEAR ;延时程序PUSHFPUSH DXPUSH CXMOV DX,DELAY_SETD1: MOV CX,-1D2: DEC BLDEC CXJNZ D2DEC DXJNZ D1POP CXPOP DXPOPFRETDELAY ENDpBREAK PROC NEAR ;按任意键退出PUSHFPUSH AXPUSH DXMOV AH,06HMOV DL,0FFHINT 21HJE RETURNMOV AX,4C00HINT 21HRETURN: POP DXPOP AXPOPFRETBREAK ENDPMY_CODE ENDSEND START五.运行结果当按下键盘上的0键时,电机开始转动,当按下键盘上的1键时,电机开始正向转动,当按下键盘上的2键时,电机开始反向转动,当按下键盘上的3键时,电机停止转动。
步进电机加速-匀速-减速运行程序(C51)
{
motor_turn();
}
}
}
rate=0x10;
x=0xf0;
do
{
motor_ffw(); //加速
rate--;
}while(rate!=0x01);
do
{
motor_ffw(); //匀速
x--;
}while(x!=0x01);
do
{
motor_ffw(); //减速
rate++;
}while(rate!=0x10);
}
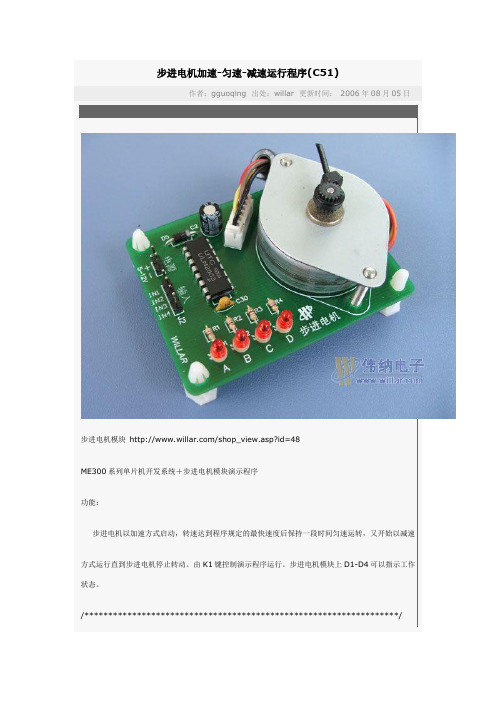
步进电机加速-匀速-减速运行程序(C51)
作者:gguoqing出处:willar更新时间:2006年08月05日
步进电机模块/shop_view.asp?id=48
ME300系列Leabharlann 片机开发系统+步进电机模块演示程序
功能:
步进电机以加速方式启动,转速达到程序规定的最快速度后保持一段时间匀速运转,又开始以减速
}
}
/********************************************************
*
*步进电机运行
*
*********************************************************/
void motor_turn()
{
uchar x;
方式运行直到步进电机停止转动。由K1键控制演示程序运行。步进电机模块上D1-D4可以指示工作状态。
/******************************************************************/
单片机步进电机控制程序代码

单片机步进电机控制程序代码在现代工业控制系统中,步进电机被广泛应用于各种场合,如数控机床、医疗设备、自动化生产线等。
而单片机作为一种集成电路,具有高度集成、体积小、功耗低等特点,成为控制步进电机的理想选择。
本文将介绍单片机步进电机控制程序代码的编写方法及其实现原理。
一、步进电机控制程序代码的编写方法步进电机的控制可以通过单片机来实现,而单片机控制步进电机的关键在于编写合适的控制程序代码。
下面将介绍一种常用的步进电机控制程序代码编写方法。
1. 确定引脚连接:首先,需要确定步进电机的引脚连接方式。
步进电机一般有两种连接方式,即单相连接和双相连接。
在单相连接方式中,步进电机只需两个控制引脚,而在双相连接方式中,步进电机需要四个控制引脚。
根据步进电机的具体型号和使用要求,选择合适的引脚连接方式。
2. 编写控制程序:根据步进电机的引脚连接方式,编写相应的控制程序。
以双相连接方式为例,步进电机的控制程序代码如下:```#include <reg52.h>sbit IN1 = P1^0; // 步进电机引脚1sbit IN2 = P1^1; // 步进电机引脚2sbit IN3 = P1^2; // 步进电机引脚3sbit IN4 = P1^3; // 步进电机引脚4void delay(unsigned int time){unsigned int i, j;for (i = time; i > 0; i--)for (j = 110; j > 0; j--);}void main(){while (1){IN1 = 1; IN2 = 0; IN3 = 0; IN4 = 0; // 步进电机正转 delay(1000);IN1 = 0; IN2 = 1; IN3 = 0; IN4 = 0;delay(1000);IN1 = 0; IN2 = 0; IN3 = 1; IN4 = 0;delay(1000);IN1 = 0; IN2 = 0; IN3 = 0; IN4 = 1;delay(1000);}}```上述代码中,通过控制引脚的电平状态,实现步进电机的正转。
三相步进电机控制程序及电路
三相步进电机控制程序及电路概述三相步进电机是利用电子技术,通过不断地使电流按照一定规律改变来控制电机转动。
本文将介绍三相步进电机的控制程序,并详细讲解电路原理。
控制程序控制程序采用的是 Arduino 开发板,因为它易于编程和控制。
代码采用 C 语言实现,主要分为两部分:1.步进电机控制程序:该部分主要用于引脚配置和执行步进电机运动;2.事件驱动程序:该部分主要用于监测按键操作,以对步进电机执行不同的运动。
步进电机控制程序代码#define SPEED 50 //步进电机转速#define STEPS 6 //步进电机齿轮数目//定义步进电机引脚int stepPins[] = {8, 9, 10, 11};//定义步进电机步进方式数组(顺序为AB-BC-CD-DA)int stepSequence[][4] = {{HIGH, LOW, LOW, HIGH},{HIGH, HIGH, LOW, LOW},{LOW, HIGH, HIGH, LOW},{LOW, LOW, HIGH, HIGH}};void setup() {//设置步进电机引脚模式为输出for (int i = 0; i < 4; i++) {pinMode(stepPins[i], OUTPUT);}}void loop() {for (int j = 0; j < 2; j++) {//顺时针旋转for (int i = 0; i < STEPS * 4; i++) {int step = i % 4;for (int pin = 0; pin < 4; pin++) {digitalWrite(stepPins[pin], stepSequence[step][pin]);}delay(SPEED);}//逆时针旋转for (int i = STEPS * 4; i > 0; i--) {int step = i % 4;for (int pin = 0; pin < 4; pin++) {digitalWrite(stepPins[pin], stepSequence[step][pin]);}delay(SPEED);}}}事件驱动程序代码``` C #define BUTTON_PIN 2 //按键引脚 #define DEBOUNCE_DELAY 50 //防抖动延时//定义全局变量 bool clockwise = true; unsigned long debounceTimer = 0;void setup() { pinMode(BUTTON_PIN, INPUT); digitalWrite(BUTTON_PIN, HIGH); Serial.begin(9600); }void loop() { if (digitalRead(BUTTON_PIN) == LOW) { if (millis() - debounceTimer > DEBOUNCE_DELAY) { debounceTimer = millis(); clockwise= !clockwise; Serial.println(clockwise ?。
四相八拍步进电机调速综述
目录引言 (1)第1章绪论 (2)1.1步进电机的概述 (2)1.1.1 步进电机的特点 (2)1.1.2步进电机的工作原理简述 (2)1.2四相八拍步进电机 (2)1.2.1 四相步进电机工作原理 (2)1.2.2 八拍得工作方式 (4)1.3单片机概述 (4)1.3.1 单片机原理简述 (4)1.3.2 8031单片机 (5)1.4总体方案设计 (5)1.4.1 系统的组成 (5)1.4.2 系统的工作原理 (6)第2章系统软件设计 (7)2.1显示子程序的设计 (7)2.2键盘子程序的设计 (8)2.3正反转程序流程图 (11)2.3.1 正反转程序流程图 (11)2.3.2 转速快慢程序流程图 (14)2.4定时中断流程图 (17)2.5语音报警系统 (19)2.6主程序设计 (20)参考文献 (22)致谢 (23)引言步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
步进电机的调速一般是改变输入步进电机的脉冲的频率来实现步进电机的调速,因为步进电机每给一个脉冲就转动一个固定的角度,这样就可以通过控制步进电机的一个脉冲到下一个脉冲的时间间隔来改变脉冲的频率,延时的长短来具体控制步进角来改变电机的转速,从而实现步进电机的调速。
在本设计方案中采用单片机内部的定时器改变脉冲的频率从而实现对步进电机的转速进行控制,实现电机调速与正反转的功能。
关键词:步进电机,单片机,调速系统第1章绪论1.1 步进电机的概述1.1.1 步进电机的特点1)一般步进电机的精度为步进角的3-5%,且不累积。
2)步进电机外表允许的温度高。
步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MOV R5,A
CJNE R5,#0FFH,LOOP1
CLR TR1
LJMP HERE
L0: DB 0FFH
L1: DB 0EH,0CH,0DH,09H,0BH,03H,07H
L2: DB 06H
CJNE R3,#01H,fan ; 判断正反转
INC R0 ;正转
CJNE R0,#09H,L4 ;判断是否超出数组边界
MOV
fan: DEC R0
CJNE R0,#00H,L4
LJMP KEYFREE
K2: CJNE R4,#03BH,K1;0011 1011
MOV R2,#060H
LJMP KEYFREE
K1: CJNE R4,#03DH,K0;0011 1101
MOV R2,#040H
LJMP KEYFREE
MOV DPTR,#L0
mov r2,#0a0h
;setb tr1
;初始化完成,等待按键
HERE:MOV R5,P1 ;记录P1口的电平
CJNE R5,#0FFH,KEYPRESS ;如果有键盘按下则进行跳转
LJMP SPEED
K6: MOV R3,#0
SPEED: MOV A,R5;重新给R4原始数据
ANL A,#3FH ;0011 1111屏蔽高两位
MOV R4,A
K5: CJNE R4,#01fH,K4 ;0001 1111 ;寻找速度档位
L3: DB 0FFH
T1INT:
MOV Tl1,#00H
MOV A,R2
MOV Th1,A
MOV A,R0
MOVC A,@A+DPTR ;读取数组
cpl a ;!!!!!!!!!!!!!!!!!!!!!
MOV P3,A ;P0口输出赋值
;R0记录工作步序;
;R1
;R2 记录电机两次步序之间TH1的大小
;R3 记录电机正反转 1正转 0反转
;R4 键盘消抖 + P1口电平分析
;R5 记录P1口电平
;R6 延时函数
;R7 延时函数
ORG 0000H
LJMP MAIN
ORG 001BH
LJMP HERE ;全部被按下,返回等待按键处
K6ORK7: CJNE R4,#080H,K6 ; 1000 0000
MOV R3,#1 ;K7按下,正转
LJMP T1INT ;T1定时器溢出中断
ORG 0100H
MAIN:MOV R3,#01H ;正转
MOV R0,#08H ;步进电机工作步序初始化
CJNE R4,#0C0H,K6ANDK7 ;1100 0000 判断K6K7是否被按下
LJMP HERE ;没有被按下,返回等待按键处
K6ANDK7: CJNE R4,#0,K6ORK7 ;判断K6K7是否是全按下
LJMP HERE ;继续等待键盘按下
KEYPRESS:MOV R4,#0AH ;延时计数
DELAY: LCALL DL1 ;调用延时函数消抖
LJMP HERE
KEYSCAN: MOV A,R5 ;R5送至A 保留R5原始数据
ANL A,#0C0H ;1100 0000屏蔽低六位
MOV R4,A
;本程序为步进电机调速控制实验
;实验要求:
;利用P0口输出脉冲序列,使用P1口接K0-K7,开关K0-K5控制步进电机转速(分六档),
;K6、K7控制步进电机转向,必需要K0-K5中一开关和K6-K7中一开关同时闭合,步进电机才能工作
;本实验采用11.059M晶振
;K7正转 K6反转
;K0K1K2K3K4K5 K0最慢 K5最快
MOV DPTR,#L2 ;指针指向励磁顺序数组
MOV P0,#0FFH ;P0口初始化
MOV TMOD,#10H ;T1工作模式初始化 0001 0000
MOV R0,#08H
LJMP L4
L4: RETI
;1ms延时函数
DL1MS: MOV R7,#01H
DL1: MOV R6,080H
DL0: DJNZ R7,DL1
RET
END
K0: CJNE R4,#03EH,HERE;0011 1110 若未寻找到档位则返回等待处
MOV R2,#00H
LJMP KEYFREE
KEYFREE: SETB TR1 ;开启定时器溢出中断
MOV R2,#0D0H
LJMP KEYFREE
K4: CJNE R4,#02FH,K3;0010 1111
MOV R2,#0A0H
LJMP KEYFREE
K3: CJNE R4,#037H,K2;0011 0111
MOV R2,#080H
MOV TL1,#00H
MOV TH1,#00H ;T1定时器装载
MOV IE,#88H ;允许中断
DJNZ R4,DELAY ;延时10ms消抖
MOV R5,P1 ;读取P1口电平信号
CJNE R5,#0FFH,KEYSCAN ;重新判断是否有按键按下