控制技术概论3
环境工程概论水污染及其控制工程水污染控制技术

第三节 水污染控制技术方法
• 一、概述 • 二、物理法 • 三、化学法及物理化学法 • 四、生物化学法
兴趣是最好的老师
• 21、水污染治理的原则是什么? • 22、按照废水处理的作用原理分为哪几种方法?各自的处理对象是什么? • 23、按照水的处理程度划分,水处理分为几级,各级采用的具体处理方
法是什么? • 24、什么是废水处理流程?污水净化后一般有哪几种处置方式? • 25、格栅的主要作用是什么?筛网的主要作用是什么? • 26、过滤主要去除的物质是什么?滤池为什么要进行反冲洗? • 27、沉淀有哪几种类型?沉淀池有哪几种类型?沉淀和浮上法的主要不
一、概述
(1)一级处理厂流程
投氯
原生污水 格 栅
沉砂池
沉淀池
接触池
出水
杂粒脱水床 污泥消化池
运出填地 污泥脱水
图1-4 一级处理厂流程图
送往农田
一、概述
(2)二级处理厂(活性污泥法)流程
投氯
原生污水
格栅
沉砂池
初次沉淀池
曝气池
二级沉淀池
接触池
出水
污泥消化池
回流活性污泥 剩余活性污泥
浓缩活性污泥 污泥浓缩池
处理方法: a 混凝 c 氧化还原 e 萃取 g 离子交换
b 中和 d 电解 f 吸附
一、概述
③生化法(生物法) 利用微生物的作用去除废水中胶体和溶
解性有机物的方法。
A、好氧生物处理法(如活性污泥法、生物
膜法、氧化塘等)
B、厌氧生物处理法
一、概述
(2)按照废水处理程度划分
一级处理(包括预处理) 二级处理(生物处理) 三级处理(深度处理)
二 物理处理法
(一).格栅和筛网[分离水中悬浮物,简单,易,效果 良好]
自动化技术概论_自动控制发展-控制技术篇

常用的数字化控制装置包括单片机、工业控制计算 机、可编程逻辑控制器、数字信号处理器等。
单片机
单片机是在一块芯片上集成了微处理器、存储器 及接口电路等,在计算机家族里体积最小、价格最 便宜、应用非常普遍,一辆普通轿车里常常有几十 个单片机在工作。
工业控制计算机
工控机类似普通微机,但提高了 工作的可靠性,配备了用于工业控 制的输入输出接口,并特别加强了 针对工业环境的抗干扰措施。
可编程逻辑控制器
数字信号处理器
( Digital Signal Processor,简称“DSP” )
DSP的计算和处理功能相当强大,早期主要用 于信号处理领域,价格也较昂贵,但随着计算机技 术的发展,价格不断降低,因而近年来在控制领域 的应用也越来越多
计算机控制方式的演变
第一阶段:集中控制
用一台计算机同时控制多台机器或设备,轮流采集反馈 信息,计算出所需要的控制量后轮流输出给每台机器或设 备,属于“分时控制”,主要缺点是可靠性差。
反馈信号
计算机
反馈信号
控制信号
受控设备1
受控设备2控制信号…受控设备N第二阶段:单机控制
一台计算机只控制一台 机器或设备,主要优点是 控制风险小。这种方式在 今天也很常见,如冰箱、 空调 、电饭煲的控制等。
计算机
反馈信号 控制信号
受控设备
第三阶段:分散控制
对于多台相互关联的机器或设备,每台机器或 设备都单独用一个数控装置来控制(单机控制方 式),但与上层的协调和管理计算机有信息交互, 属于网络化的控制系统。
控制工程 第1章 概论讲解

美国的M. E. Merchant提出计算机集成制造的概 念(1969)
44
美国“哥伦比亚”号航天飞机首次发射成功(1981 年)
45
中国批准863高技术计划,包括自动化领域的计算 机集成制造系统和智能机器人两个主题(1986)
38
1948年:N. Wiener发表《控制论》,标志经典控制 理论基本形成;经典控制理论以传递函数为基础,主要 研究单输入—单输出(SISO)系统的分析和控制问题;
1950年:W. R. Evans提出根轨迹法,进一步充实了经 典控制论;
1954年:钱学森发表《工程控制论》 ;
50年代末60年代初:现代控制理论形成;现代控制理 论以状态空间法为基础,主要分析和研究多输入-多输 出( MIMO )、时变、非线性等系统的最优控制、最优滤 波、系统辨识、自适应控制、智能控制等问题;控制理 论研究的重点开始由频域移到从本质上说是时域的状态 空间方法。
主反馈 反馈元件
扰动信号
控制 输出 xo 对象
典型的反馈控制系统方块图
20
➢ 给定元件
产生给定信号或输入信号。
➢反馈元件
测量被控制量(输出量),产生反馈信号。为便 于传输,反馈信号通常为电信号。
注意:在机械、液压、气动、机电等系统中存在 着内在反馈,这种反馈无须专门的反馈元件,是系 统内部各参数相互作用产生的,如作用力与反作用 力之间形成的直接反馈。
控制工程基础
机械工程学院
课程的性质及学习要求
课程的性质: 控制工程基础主要阐述的是有关自动控制技术的
基础理论,它是一门非常重要的技术基础课,它涉及 古典控制理论的主要内容及应用。
学习要求: ➢本课程是在学习高等数学、理论力学、电工电子等 课程的后续课程,内容比较枯燥,也比较难,请预习 上课内容; ➢上课需要认真记好笔记,将对笔记进行检查,上课 时不得讲话; ➢课后需要认真的复习。
机电控制技术基础复习题
新复习题第1章概论单选题1. 在机电设备驱动的发展中,成组拖动的含义是【 D 】A. 多台电机拖动一台设备B. 一台电机拖动一台设备C. 多台电机拖动多台设备D. 一台电机拖动多台设备2. 机电传动系统的五大组成除了有电源、电气控制、传动机构、工作机构,还有的是【C 】A.继电器B.接触器C.电动机D.机械手3. 研究机电传动系统的运动规律时,系统中的电动机种类是【 D 】A. 交流电动机B. 直流电动机C. 控制电机D. 不分类4. 一般在机电控制系统中的机械设备是【 A 】A. 控制对象B. 控制方法C. 控制规律D. 控制指标5. 机电传动系统中拖动生产机械的原动机是【 D 】A. 汽油机B. 柴油机C.水轮机D. 电动机6. 以下不.是拖动机电传动系统的原动机是【 C 】A.直流电动机B.交流电动机C. 汽油机D. 步进电动机7. 组成机电系统三大部分的是电气控制系统、电力拖动或机电传动和【 A 】A. 机械运动部件B.发电机C.汽油机D. 水轮机8. 以下不.是组成机电系统三大部分的是【 C 】A. 电气控制系统B. 机械运动部件C. 发电机D. 电力拖动9. 机电传动系统的目的是将电能转变为【 D 】A. 光能B. 核能C. 热能D. 机械能10. 机电传动中成组拖动是指一台电动机拖动【 B 】A. 多台发电机B. 多台生产机械C. 一台生产机械D. 一台发电机11. 机电传动的目的是【】A. 将电能转变为机械能B. 将机械能转变为电能C. 将光能转变为机械能D. 将机械能转变为光能12. 一般机电系统正常工作时要求速度是【 A 】A. 稳速B. 加速C. 减速D. 零13. 一般机电系统快速返回时要求速度是【 B 】A. 稳速B. 加速C. 减速D. 零14. 一般机电传动的任务包括实现生产机械的启动、停止,以及【C 】A. 维修B. 保养C. 调速D. 能量转换15. 在自动控制系统中,被控对象的输出量要求按照给定规律运行的是【】A. 温度B. 压力C. 液位D. 加工轮廓16. 在自动控制系统中,被控对象的输出量要求保持为某一恒定值的是【】A 飞行航线B 记录曲线C 液位D 加工轮廓17. 组成完整机电传动系统除了有电源、电气控制、传动机构、工作机构外,还有的是【】A 液压缸B 气压缸C 电动机D 发电机18. 人本身通过判断和操作进行的控制叫作【】A. 自动控制B. 手动控制C. 机械控制D. 温度控制19. 在数控机床控制系统中,对于想实现控制的目标量或控制量是【】A . 温度 B. 位置 C. 压力 D. 湿度第2章 机电传动系统的动力学基础单选题1. 恒转矩型生产机械的负载特性是 【 C 】A. 转速是恒定的B. 功率是恒定的C.转矩是恒定的D. 方向是恒定的2.恒功率型负载的负载转矩大小与转速 【 B 】A. 成正比B. 成反比C.无关D.相等3.恒功率粗加工时下列叙述正确的是 【 D 】A.切削量大,负载阻力小,开低速B. 切削量小,负载阻力大,开低速C.切削量大,负载阻力大,开高速D. 切削量大,负载阻力大,开低速4.恒功率精加工时下列叙述正确的是 【 B 】A.切削量大,负载阻力小,开低速B. 切削量小,负载阻力小,开高速C.切削量大,负载阻力大,开高速D. 切削量小,负载阻力小,开低速5. 反抗性转矩由下列哪种现象作用后产生的 【 B 】A. 地球引力B. 摩擦C. 电磁感应D. 热传导6. 反抗性转矩的方向 【 B 】A.与运行方向相同B. 与运行方向相反C.与运动方向无关D. 与电动机方向一致7.电动机与生产机械的机械特性曲线有交点,此交点只表明 【 C 】A.电动机的转速大于生产机械的转速B.电动机的转速小于生产机械的转速C.电动机的转速等于生产机械的转速D.是稳定运行平衡点8. 电动机与生产机械的机械特性曲线有交点,此交点只表明 【 A 】A.电动机的转矩等于生产机械的转矩B.电动机的转矩小于生产机械的转矩C.电动机的转矩大于生产机械的转矩D.是稳定运行平衡点9.负载转矩根据功率守恒原则进行折算时必须处于 【 B 】A.加速状态B. 静态C.动态D.减速状态10.多轴系统折算到单轴系统,可根据动能守恒进行的折算是 【 C 】A.负载转矩B.拖动转矩C.飞轮转矩D.摩擦转矩11.当机电系统拖动转矩与负载转矩大小相等、方向相反时的状态称为 【 A 】A. 稳态B. 加速状态C. 减速状态D. 过渡状态12. 单轴旋转拖动系统运动方程 2375M L GD dn T T dt-=中M T 与L T 的符号是 【 A 】 A. 可正可负 B. M T 为正、L T 为负 C. M T 为负、L T 为正 D. 都为负13. 电动机拖动负载上升时,电动机输出转矩M T 与负载转矩L T 分别为 【 D 】A. M T 是制动转矩、L T 是拖动转矩B. M T 是拖动转矩、L T 是拖动转矩C. M T 是制动转矩、L T 是制动转矩D. M T 是拖动转矩、L T 是制动转矩14. 电动机拖动负载下降时,电动机输出转矩M T 与负载转矩L T 分别为 【 A 】A. M T 是制动转矩、L T 是拖动转矩B. M T 是拖动转矩、L T 是拖动转矩C. M T 是制动转矩、L T 是制动转矩D. M T 是拖动转矩、L T 是制动转矩15. 质量与转动惯量的关系是 【 B 】A. 质量小、转动惯量大B. 质量大、转动惯量大C. 质量大、转动惯量小D. 无关16. 关于飞轮转矩2GD 叙述正确的是 【 D 】A. 2GD 是重量乘以直径的平方B. 2GD 中的D 是物体的实际直径C. 2GD 中的G 是重力加速度D. 2GD 中的D 是惯性直径17. 恒转矩负载特性的特点是负载转矩L T 与转速n 的关系为【 D 】A.随着转速n 升高而增大B. 随着转速n 升高而减小C.随着转速n 降低而减小D. 与转速n 的大小无关18. 反抗性恒转矩负载转矩的机械特性曲线是 【 B 】A. 在第一、第二象限B. 在第一、第三象限C. 在第一、第四象限D. 只在第一象限19. 位能性恒转矩负载转矩的机械特性曲线是 【 C 】A. 在第一、第二象限B. 在第一、第三象限C. 在第一、第四象限D. 只在第一象限20. 通风机负载特性的转矩与转速的关系是 【 B 】A. 与转速成正比B. 与转速的平方成正比C. 与转速成反比D. 与转速的平方成正比21. 恒功率负载特性的转矩与转速的关系是 【 C 】A. 与转速成正比B. 与转速的平方成正比C. 与转速成反比D. 与转速的平方成正比22. 单轴旋转拖动系统运动方程 M L d T T J dt ω-=中d dt ω的含义是【 】 A. 角速度 B. 角加速度 C. 转动惯量 D. 转矩23. 单轴旋转拖动系统运动方程 2375M L GD dn T T dt -=中dndt 的含义是【 】 A. 角速度 B. 加速度 C. 转动惯量 D. 转矩24. 多轴旋转拖动系统负载转矩的折算中,是把负载转矩折算到【 】 A. 电动机轴上 B. 负载轴上 C. 第一中间轴上 D. 第二中间轴上25. 电动机运行状态如图所示,当L M T T 〉时,判断正确的是: 【】A .匀速B .减速C .加速D .不确定26. 电动机运行状态如图所示,当L M T T =时,判断正确的是:【 】 A .匀速 B .减速 C .加速 D .不确定27. 电动机运行状态如图所示,当L M T T =时,判断正确的是: 【】A .匀速B .减速C .加速D .不确定28. 转动的物体与直线运动的物体,具有保持运动状态的性质叫:【 】 A. 重量 B. 弹性 C.惯性 D. 惯量29. 恒功率型机械设备的机械特性是:【 】 A .拖动转矩与转速成正比 B .拖动转矩与转速成反比C .负载转矩与转速成正比D .负载转矩与转速成反比30. 单轴旋转拖动系统运动方程 M L d T T J dt ω-=中ω的含义是【 】 A. 角速度 B. 角加速度 C. 转动惯量 D. 转矩31. 单轴旋转拖动系统运动方程 2375M L GD dn T T dt -=中2GD 的含义是【 】 A. 速度 B. 加速度 C. 转动惯量 D. 飞轮力矩32. 多轴旋转拖动系统飞轮转矩的折算中,是把飞轮转矩折算到【 】 A. 电动机轴上 B. 负载轴上 C. 第一中间轴上 D. 第二中间轴上33. 与物体的转矩无.关的物理量是:【 】 A. 质量 B. 温度 C. 回转半径 D. 加速度34. 因摩擦、非弹性体的压缩、拉伸与扭转等作用产生的转矩是:【 】 A .电磁转矩 B .反抗转矩 C .位能转矩 D .飞轮转矩35. 单轴旋转拖动系统运动方程 M L d T T J dt ω-=中J 的含义是【 】 A. 角速度 B. 角加速度 C. 转动惯量 D. 转矩36. 单轴旋转拖动系统运动方程 2375M L GD dnT T dt -=中n 的含义是【 】 A. 速度 B. 加速度 C. 转动惯量 D. 飞轮力矩37. 多轴旋转拖动系统转动惯量的折算中,是把转动惯量折算到【 】 A. 电动机轴上 B. 负载轴上 C. 第一中间轴上 D. 第二中间轴上38. 多轴拖动系统转动部分进行折算时采用功率守恒原则的是: 【】A.拖动转矩B.负载转矩C.转动惯量D.飞轮转矩39. 载转矩与转速的平方成正比的机械是:【】A.恒功率型B.恒转矩型C.离心式机械D.直线型机械二.判断改错题1. 拖动转矩与负载转矩方向一致时,其符号必有一正一负。
化工智能控制概论终结考核题

化工智能控制概论终结考核题一、引言在化工领域,智能控制技术的应用日益广泛。
化工智能控制概论是一门关于化工过程中智能控制技术的基础课程。
本文将从概念、原理、应用等方面全面、详细、完整地探讨化工智能控制概论的相关主题。
二、概念和原理2.1 智能控制的概念智能控制是指利用计算机、传感器、执行器等技术手段,对化工过程进行自动化控制,并通过学习、优化等算法实现自适应调节的过程。
智能控制可以根据化工过程的变化,自动调整控制策略,以提高生产效率、降低能耗和减少人为干预。
2.2 智能控制的原理智能控制的原理主要包括感知、决策和执行三个环节。
感知环节通过传感器获取化工过程的实时数据;决策环节通过算法对数据进行分析和处理,确定最优控制策略;执行环节通过执行器对化工过程进行控制操作。
三、智能控制的应用3.1 智能控制在化工生产中的应用智能控制在化工生产中有着广泛的应用。
例如,在化工反应过程中,智能控制可以根据反应物浓度、反应速率等参数,自动调整反应条件,以提高反应效率和产物质量。
在化工装置运行中,智能控制可以监测设备状态,预测设备故障,并进行自动维护和修复。
3.2 智能控制在环境保护中的应用智能控制在环境保护中也有着重要的应用。
例如,在废气处理过程中,智能控制可以根据废气成分和排放标准,自动调整废气处理装置的操作参数,以保证废气排放符合环保要求。
在水处理中,智能控制可以根据水质状况,自动调整水处理设备的运行状态,以提高水的净化效果。
3.3 智能控制在安全生产中的应用智能控制在化工安全生产中也起到了重要的作用。
例如,在危险品储存和运输过程中,智能控制可以通过监测温度、压力等参数,自动调整储罐和管道的运行状态,以防止事故的发生。
在工业装置的安全监测中,智能控制可以通过监测设备状态和环境条件,及时发现问题并采取措施,以确保工作人员的安全。
四、智能控制的发展趋势智能控制技术在化工领域的应用将会持续发展。
未来,智能控制将更加注重对化工过程的自动化和智能化,以提高生产效率和产品质量。
机床数控技术 第五版 第一章 数控技术概论

1.3 数控机床的分类
第1章 数控技术概论
3.半闭环数控机床
1.3 数控机床的分类
第1章 数控技术概论
1.3 数控机床的分类
1.3.4 按功能水平分类
按数控系统功能水平的不同 , 数控机床可分为低 、 中 、 高三档 , 这种 分类方式在我国被广泛使用 。 低 、 中 、 高档的界线是相对的 , 不同时期的 划分标准有所不同 。 就目前的发展水平来看 , 可以根据表 1-2 所列举的功能 指标进行数控系统档次的区分 。 其中 , 中 、 高档一般称为全功能型数控或 标准型数控 。 在我国还有经济型数控的提法 , 经济型数控属于低档数控 ,是 由单片机和步进电动机组成的简易数控系统 , 或者是其他功能简单 、 价格较 低廉的数控系统 。 经济型数控系统主要用于车床 、 线切割机床以及由用户 自行改造的旧机床等 。
数控机床是指装备了计算机数控系统的机床 , 简称 CNC 机床 。
第1章 数控技术概论
1.2 数控机床的组成
3.数控技术(Numerical Control Technology)
数控技术是指用数字化信息对某一对象进行控制的技术 , 被控制对象可以是位移 、 转角 、 速度等机械量 , 也可以是温度 、 压力 、 流量 、 颜色等物理量 , 这些量的量值不仅可以测量 ,而 且可以经 A/D 或 D/A 转换 , 用数字信号来表达或控制 。 数控技术是近代发展起来的一种自动控 制技术 , 是机械加工现代化的重要基础与关键技术 。
早期的计算机运算速度低 , 不能适应数控机床实时控制的要求 , 人们只好 用与门 、 或门 、非门等数字逻辑电路 “ 搭 ” 成一台专用计算机作为数控系 统 , 这就是硬件连接数控 , 简称数控(NC)。 随着电子元器件的发展 , 硬件连接 数控阶段经历了三代 :
测控技术与仪器专业概论

测控技术与仪器专业概论测控技术与仪器专业是一门集测量、控制和仪器技术于一体的综合性学科。
测控技术与仪器专业以研究测控技术和仪器的相关理论、方法和应用为主要内容,培养掌握测控技术和仪器的设计、制造、应用与管理等方面的基本知识和实际技能的高级工程技术人才。
测控技术是现代工业自动化、电子信息、航空航天、医疗健康、能源环保等领域的关键技术之一、它以电子技术、计算机技术、通信技术为基础,通过各种仪器设备对各种物理量和无形参量进行测量、检测、控制和调节,实现各种物理过程、化学过程、生物生产和生活技术过程的自动化。
测控技术在工业生产、科学研究和社会生活中发挥着不可或缺的作用。
自动化仪器与设备是测控技术与仪器专业的核心学科,它研究自动化控制系统的仪器与设备的设计、制造、调试、维护和管理。
包括控制器、执行器、传感器、检测仪表、工业自动化控制系统、工艺参数测试仪表等内容。
精密仪器与机械是测控技术与仪器专业的重要学科,它研究精密测量仪器和高精度机械设备的设计、制造、检测和维修。
涉及的领域包括精密长度测量仪器、精密转角测量仪器、精密力学测量仪器、精密电学测量仪器等。
光学仪器与光电子技术是测控技术与仪器专业的重要学科,它研究利用光学原理和光电子技术进行精密测量、检测和控制。
涉及的领域包括光学测量仪器、光谱仪器、光电传感器等。
电子测量技术与仪器是测控技术与仪器专业的重要学科,它研究利用电子技术进行测量、检测和控制。
涉及的领域包括电位器、电流表、电压表、示波器、频谱仪等。
生物与医学仪器是测控技术与仪器专业的兴起学科,它研究生物和医学领域的测量、检测和控制。
涉及的领域包括生物传感器、医学图像仪器、生物医学信号处理等。
信息测量技术与仪器是测控技术与仪器专业的前沿学科,它研究利用计算机、通信技术进行信息的测量、检测和控制。
涉及的领域包括信息数据采集、信息处理、信息传输等。
传感器与测量技术是测控技术与仪器专业的基础学科,它研究测量和检测所需的传感器的工作原理、特性及其应用。
电机电器及其控制技术

电气工程概论
1
电机是以电磁感应现象为基础实现机械能与 电能之间的转换以及变换电能的机械,包括 旋转电机和变压器两大类。 旋转电机 机电能量转换装置 发电机 机械能→电能 电动机 电能→机械能 变压器 电能变换装置
电气工程概论
2
2.1 电机的作用与发展简史
电机的作用
电能的生产、 传输和分配
定子绕组
转子 机座
电气工程概论
9
电 动 机
电气工程概论
10
变压器
将一种电 压的电能 变换为另 一种电压 的电能的 装置
单相变压器 三相变压器 …
电气工程概论
11
特种电机
1)永磁无刷 电动机
应用: 航空、航天 家用电器 机器人 电动汽车 电动车组 电动舰船 …
电气工程概论
12
特种电机
应用: 工业机械; 轨道交通; 电梯; 航空母舰飞机发 射; 导弹发射架; 电磁推进潜艇; …
1870年
1878年 1880年 1885年 1888年
格拉姆制成了环形电枢自激发电机
出现了铁芯开槽法。有槽铁芯和鼓形绕组的结构一 直沿用至今 爱迪生制造了名为“巨象”的大型直流发电机 费拉里斯提出旋转磁场原理,研制出两相异步电动 机 俄国人制成一台三相交流单鼠笼异步电动机
电气工程概论 4
1882年 1882年 1882年 1884年 1891年
发电机 变压器
……
驱动各种机 械和装备
电动机 机床 水泵 ……
控制电机
阀门控制 火炮控制 计算机 ……
电气工程概论
3
1831年
1834年 1836年 1845年 1866年
法拉第创造了第一部感应发电机的模型
高中通用技术:第四章 控制与设计 教案

第四章控制与设计〔一〕本章重点知识阐述:(1)控制是人们根据自己的目的,通过一定的手段,使事物沿着某一确定的方向发展。
这里所说的手段就是控制技术。
(2)简单的控制系统由两部分组成,即被控对象和控制装置。
其中的控制装置,包括传感器、控制器、执行器等环节,对于闭环系统来说,还包括反馈环节和比较环节。
(3)闭环控制系统是信息流经一个闭合环路,在其系统中将输出信息反传给比较环节的做法,称之为反馈。
开环控制系统是信息总是自输入端单向传至输出端,不存在信息逆向流动,也就不存在闭环。
(4)干扰就是控制系统的外部环境或条件对系统的工作准确性产生的影响,这种影响越小越好。
分析一个控制系统的干扰因素要分析控制系统易受到其外部环境或条件中的哪些因素的影响。
(5)控制系统的运行调试通常有以下几方面的内容,即:系统的试运行、系统参数的调整、其他问题的发现与解决。
〔6〕控制系统的评价与优化通常有以下几个方面内容,即系统方案的评价与优化,系统制作水平的评价与优化,系统的总体评价与优化等。
〔二〕基础知识再现:1、信息流经一个闭合环路,这类系统称之为。
此系统中将输出信息反传给比较环节的做法,称之为。
2、闭环控制系统与开环控制系统,是两类不同的系统。
从构成形式上看,二者的不同表现为。
从本质上讲,二者的不同在于。
3、简单的控制系统由两部分组成,即和。
其中的控制装置,包括传感器、控制器、执行器等环节,对于闭环系统来说,还包括环节与环节。
4、开环控制系统的结构和原理比较简单,信息从输入端传到输出断,仅有一条路径。
它的最大缺点是不高;闭环控制系统的结构较为复杂,信息流经的路径有两条,它可以有较高的和较强的性能。
5、控制系统框图中,信息流经的路径叫做,对于闭环控制系统来说,有两个基本通道,那就是和。
6、在控制系统中,将控制器的信号转换成能影响被控对象的信号的装置,称为。
7、在人体温度控制系统中,皮肤相当于。
8、就是控制系统的外部环境或条件对系统的工作准确性产生的影响。
SDP技术概论
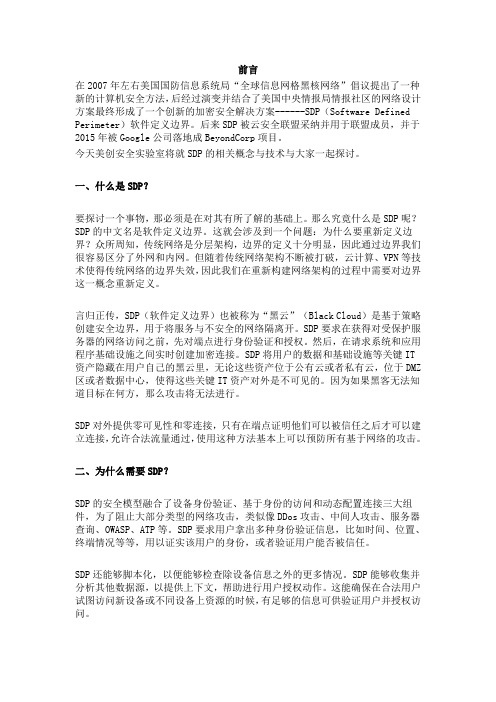
前言在2007年左右美国国防信息系统局“全球信息网格黑核网络”倡议提出了一种新的计算机安全方法,后经过演变并结合了美国中央情报局情报社区的网络设计方案最终形成了一个创新的加密安全解决方案------SDP(Software Defined Perimeter)软件定义边界。
后来SDP被云安全联盟采纳并用于联盟成员,并于2015年被Google公司落地成BeyondCorp项目。
今天美创安全实验室将就SDP的相关概念与技术与大家一起探讨。
一、什么是SDP?要探讨一个事物,那必须是在对其有所了解的基础上。
那么究竟什么是SDP呢?SDP的中文名是软件定义边界。
这就会涉及到一个问题:为什么要重新定义边界?众所周知,传统网络是分层架构,边界的定义十分明显,因此通过边界我们很容易区分了外网和内网。
但随着传统网络架构不断被打破,云计算、VPN等技术使得传统网络的边界失效,因此我们在重新构建网络架构的过程中需要对边界这一概念重新定义。
言归正传,SDP(软件定义边界)也被称为“黑云”(Black Cloud)是基于策略创建安全边界,用于将服务与不安全的网络隔离开。
SDP要求在获得对受保护服务器的网络访问之前,先对端点进行身份验证和授权。
然后,在请求系统和应用程序基础设施之间实时创建加密连接。
SDP将用户的数据和基础设施等关键IT 资产隐藏在用户自己的黑云里,无论这些资产位于公有云或者私有云,位于DMZ 区或者数据中心,使得这些关键IT资产对外是不可见的。
因为如果黑客无法知道目标在何方,那么攻击将无法进行。
SDP对外提供零可见性和零连接,只有在端点证明他们可以被信任之后才可以建立连接,允许合法流量通过,使用这种方法基本上可以预防所有基于网络的攻击。
二、为什么需要SDP?SDP的安全模型融合了设备身份验证、基于身份的访问和动态配置连接三大组件,为了阻止大部分类型的网络攻击,类似像DDos攻击、中间人攻击、服务器查询、OWASP、ATP等。
交通设备与控制工程专业本科课程设置
交通设备与控制工程专业本科课程设置引言交通设备与控制工程专业是培养具备交通设备与控制方面知识和技能的工程技术人才的专业。
本专业课程设置旨在培养学生掌握交通设备与控制的基本理论和技术知识,具备交通设备的设计、制造、运维及控制的能力,适应交通运输行业的需求和发展。
一、基础课程1.高等数学:教授数学的基本概念和方法,为学生打好数学基础,为后续专业课程学习奠定基础。
2.大学物理:介绍物理学的基本原理和物质运动的基本规律,为学生理解交通设备与控制原理提供基础。
3.计算机应用基础:培养学生熟练使用计算机基本操作和常用办公软件,为后续专业课程学习和实践操作提供支持。
二、专业基础课程1.交通设备工程概论:介绍交通设备工程的基本概念、发展历程和研究内容,使学生了解交通设备工程的基本知识。
2.交通控制技术概论:介绍交通控制技术的基本原理和方法,培养学生掌握交通控制的基本理论和技术知识。
3.交通设备制造技术:教授交通设备的制造工艺、方法和流程,培养学生具备交通设备的制造能力。
4.交通设备运维与管理:介绍交通设备的运维和管理方法,培养学生具备交通设备的运维和管理能力。
5.控制系统设计:教授控制系统的设计和优化方法,培养学生掌握控制系统设计的基本理论和技术。
三、专业核心课程1.交通设备设计原理:讲授交通设备设计的基本原理和方法,培养学生进行交通设备设计的能力。
2.交通设备故障诊断与维修:教授交通设备故障诊断和维修方法,使学生具备交通设备故障诊断和维修的能力。
3.交通控制系统设计:介绍交通控制系统的设计原理和方法,培养学生进行交通控制系统设计的能力。
4.交通模拟与优化:讲授交通模拟和优化方法,引导学生研究交通模拟与优化问题,提高交通系统的效率和安全性。
四、实践教学环节1.实习实训:组织学生进入交通设备制造企业或交通管理部门进行实习实训,锻炼学生的实践操作能力。
2.毕业设计与论文:引导学生进行交通设备与控制方面的科研项目,要求学生掌握科学研究方法和论文写作规范。
1控制系统概论

2010-12-24
21
1.2.5 其它分类方法
(1)按系统的输入/输出信号数量分:单入/单出系统(SISO) 和多入/多出系统(MIMO) (2)按控制系统的功能分:温度控制系统、速度控制系统、位 置控制系统等。 (3)按系统元件组成来分:机电系统、液压系统、生物系统。 (4)按不同的控制理论分支设计的新型控制系统分:最优控制 系统,自适应控制系统,预测控制系统,模糊控制系统, 神经网络控制系统等等。
(1)稳定性。自动控制系统的最基本的要求是系统必须是 稳定的,不稳定的控制系统是不能工作的。 (2)快速性。在系统稳定的前提下,希望控制过程(过渡 过程)进行得越快越好,但如果要求过渡过程时间很 短,可能使动态误差(偏差)过大。合理的设计应该 兼顾这两方面的要求。 (3)准确性。即要求动态误差和稳态误差都越小越好。当 与快速性有矛盾时,应兼顾这两方面的要求。
2010-12-24
32
在20世纪50年代,控制工程的发展的重点是复平面和根 轨迹的发展。进而在20世纪80年代,数字计算机在控制 系统中的使用变得普遍起来,这些新控制部件的使用使 得控制精确、快速。 状态空间方法属于时域方法,其核心是最优化技术。它 以状态空间描述(实质上是一阶微分或差分方程组)作 为数学模型,利用计算机作为系统建模分析、设计乃至 控制的手段,适应于多变量、非线性、时变系统。
2010-12-24
33
(三) 大系统控制理论阶段 20世纪70年代开始,出现了一些新的控制方法和理论。 (1)现代频域方法,该方法以传递函数矩阵为数学模型, 研究线性定常多变量系统; (2)自适应控制理论和方法,该方法以系统辨识和参数 估计为基础,处理被控对象不确定和缓时变,在实时 辨识基础上在线确定最优控制规律; (3)鲁棒控制方法,该方法在保证系统稳定性和其它性 能基础上,设计不变的鲁棒控制器,以处理数学模型 的不确定性;
环境工程概论第3章水污染及其控制工程水污染控制技术(3)

一、概述
(1)一级处理厂流程
投氯
原生污水
格 栅脱水床
污泥消化池
运出填地
污泥脱水
送往农田
图1-4 一级处理厂流程图
一、概述
(2)二级处理厂(活性污泥法)流程
投氯
原生污水
格 栅
沉砂池
初次沉淀池
曝气池
二级沉淀池
接触池
出水
回流活性污泥 剩余活性污泥 污泥消化池 浓缩活性污泥 污泥浓缩池
沉渣处理
图 城市污水典型处理流程图
城市污水处理厂实例照片
处理规模:20万吨/d
进水粗格栅
进水细格栅
进 水 巴 氏 流 量 槽
进水平口堰
曝气沉砂池
初沉池
挡板的作用?
出水部位?
中心筒及行车的作用?
曝气池(何种类型曝气?)
曝气池回流污泥(回流的作用?)
鼓风机(沼气驱动) 鼓风机
①给水处理:将原水中的杂质去掉,加工成符合生产 和生活使用水质要求的成品水;
②排水处理:收集使用过的废水并处理到水质符合循
环使用或排放要求。
一、概述
(一)水污染防治的目标 ①确保地面水和地下饮用水源地的水质。 ②恢复各类水体的使用功能。 ③还清地面水体的水质,恢复其美好的 观瞻,增加人类居住区的悦人景色。
筛滤法、重力沉淀法、上浮法(如隔油法)、 气浮、离心分离、滤池、微滤机等。
一、概述
③二级处理
主要任务: 大幅度地去除污水中呈胶体和溶解状态的有 机物。 (生物处理)
处理方法:
以生化处理为主体工艺。 主要有活性污泥和生物膜法。
一、概述
④三级处理
(深度处理或高级处理) 主要任务:防止受纳水体发生富营养化和受 到难降解的有毒化合物的污染。//污水回用。 去除对象:污水中的N、P及难生物降解的有 机物、病原菌、矿物质(盐类)等。
网络信息安全技术概论第三版答案
网络信息安全技术概论第三版答案第一章概论1、谈谈你对信息的理解.答:信息是事物运动的状态和状态变化的方式。
2、什么是信息技术?答:笼统地说,信息技术是能够延长或扩展人的信息能力的手段和方法。
本书中,信息技术是指在计算机和通信技术支持下,用以获取、加工、存储、变换、显示和传输文字、数值、图像、视频、音频以及语音信息,并且包括提供设备和信息服务两大方面的方法与设备的总称。
也有人认为信息技术简单地说就是3C:Computer+Communication+Control。
3、信息安全的基本属性主要表现在哪几个方面?答:(1)完整性(Integrity)(2)保密性(Confidentiality)(3)可用性(Availability)(4)不可否认性(Non-repudiation)(5)可控性(Controllability)4、信息安全的威胁主要有哪些?答:(1)信息泄露(2)破坏信息的完整性(3)拒绝服务(4)非法使用(非授权访问)(5)窃听(6)业务流分析(7)假冒(8)旁路控制(9)授权侵犯(10)特洛伊木马(11)陷阱门(12)抵赖(13)重放(14)计算机病毒(15)人员不慎(16)媒体废弃(17)物理侵入(18)窃取(19)业务欺骗等5、怎样实现信息安全?答:信息安全主要通过以下三个方面:A 信息安全技术:信息加密、数字签名、数据完整性、身份鉴别、访问控制、安全数据库、网络控制技术、反病毒技术、安全审计、业务填充、路由控制机制、公证机制等;B 信息安全管理:安全管理是信息安全中具有能动性的组成部分。
大多数安全事件和安全隐患的发生,并非完全是技术上的原因,而往往是由于管理不善而造成的。
安全管理包括:人事管理、设备管理、场地管理、存储媒体管理、软件管理、网络管理、密码和密钥管理等。
C 信息安全相关的法律。
法律可以使人们了解在信息安全的管理和应用中什么是违法行为,自觉遵守法律而不进行违法活动。
自动化的前沿技术

非线性控制理论
对非线性控制系统的研究,到上个世纪四十年代, 已取得一些明显的进展。主要的分析方法有:相平 面法、李亚普诺夫法和描述函数法等。 这些方法都已经被广泛用来解决实际的非线性系 统问题。但是这些方法都有一定的局限性,都不能 成为分析非线性系统的通用方法。 虽然这些年来,国内外有不少学者一直在这方面 进行研究,也研究出一些新的方法,如频率域的波 波夫判据,广义圆判据,输入输出稳定性理论等。 但总的来说,非线性控制系统理论目前仍处于 发展阶段,远非完善,很多问题都还有待研究解决, 领域十分宽。
专家系统
专家系统(Expert System)是一个基于知识的智能 推理系统,它涉及到对知识获取、知识库、推理控制 机制以及智能人机接口的研究,是集人工智能和领域 知识于一体的系统。近些年,专家系统的迅速发展和 广泛应用大大推进了各个应用领域向智能化方向发展, 成为人工智能从实验室研究进入实用领域的一个里程 碑。 在一个成熟的专家系统中,有几项技术是极为关 键的。首先,为了便于知识在计算机中的存贮、检索、 使用和修改,并进行推理和搜索,知识表示技术必须 具有很高的效率,目前主要有产生式表达法、语义网 络表达法、框架表达法、谓词逻辑表达法等技术,并 且新的技术还在开发当中; 其次,因为要在专家系统中用计算机模拟人的思维,不 精确推理方法是必不可少的,
自适应控制
任何一个实际系统都具有不同程度的不确定 性,这些不确定性有时表现在系统内部,有时 表现在系统的外部。从系统定能准确知道。作为外部环境对系统的 影响,可以等效地用许多扰动来表示。这些扰 动通常是不可预测的。 此外,还有一些测量时产生的不确定因素 进入系统。面对这些客观存在的各式各样的不 确定性,如何设计适当的控制作用,使得某一 指定的性能指标达到并保持最优或者近似最优, 这就是自适应控制所要研究解决的问题。
现代测控技术概论

1.3计算机控制系统概述
1.3.1微机过程控制系统的基本组成
过程控制一词具有特定的含义,广义地说,过程是一个 能被监视或控制的物理系统。而过程变量是指该系统中应按 照某种目的或规则变化的物理参数,也就是被控制量。控制 的目的是使一个或多个过程变量达到预定的最佳参考值,从 而使系统处于最佳工作状态。
图1-6微机过程控制系统的组成框图
1.3.2计算机控制系统的类别及要求
一般来说,各类控制系统均可以使用计算机进行在线控 制。但是,往往只有在那些更能体现计算机作用的控制系统 中才使用计算机。所使用的计算机档次需按系统控制任务的 情况恰当地选择。为了了解计算机控制系统的概貌,在前面 所介绍的基本型计算机过程控制系统的基础上,再按计算机 在计算机控制系统中所担任的不同控制任务分类, 几种:
人类在工程实践的过程中,一种需求是要采取各种方法 获得反映客观事物或对象的运动属性的各种数据、记录并进 行必要的处理,这种技术称为“测量”。另一种需求是要采 取各种方法支配或约束某一客观事物或对象的运动过程,达 到一定的目的,这种技术称为“控制”。
“测量”和“控制”是人类认识世界和改造世界的两项 工作任务。相应地,人们就要研制和发展测控仪器或系统以 实现测量和控制,与此相关的理论和技术就是测控技术。测 控仪器或测控系统按照任务的不同,可以分为三大类,即检 测系统、控制系统和测控系统。
4) A/D
A/D
(1)分辨率和量化误差。对于同样的量化值,分辨率由 寄存器的位数决定,也就是量化单位q。设满刻度为Xm,寄 存器位数为n位,则
q Xm 2n 1
(1.7)
量化误差为ε=q/2。
(2)偏移误差。偏移误差是指输入信号为零,输出信号 不为零时的值,所以也称为零值误差。偏移误差通常是由放 大器的偏移电压产生的,一般在静态时对电路进行调整,使 之最小。
发酵调味品中黄曲霉毒素检测控制技术概论
we a a y i t e d v l p e tp o p c s o h f t x n c n r lt c n l g e m e t to r d c s n l ss h e e o m n r s e t ft e a l o i o t o e h o o y i f r n a i n p o u t . a n
JN emi CHE Z e — n I Xu - n, h n mig。
( aUnv r i Colg fBilgc l g n eig, e g u 6 0 3 , ia XiHu iest y, l eo o o ia e En ie rn Ch n d 1 0 9 Chn )
Key wor s:f r n e o i n ; fa ox n;o d s f t d t c i n; on r l d e me t d c nd me t a l t i f o a e y; e e to c t o
食 品是 人类赖 以 生存 和 发展 的物质 基 础 , 而食 品 安 全 问题是 关系到 人 体健 康 、 社会 稳 定 和经 济 发展 等 国计 民生 的重大 问题 , 品安 全 检测 与危 害 控制 技术 食
ton a o r f a l t x n a e a e e h l g e v e s us e n Fe m e a i n p od c s i nd c ntolo fa o i nd r lt d t c no o i s ha e be n dic s d i r nt to r u t ,
点 。文章论述 了发 酵制品 黄 曲霉毒 素检 测控 制的 重要 性及 相 关的技 术 , 分析 了发 酵制 品 中黄 曲霉毒 素
控 制技 术 的发展 前 景 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电气信息工程学院自动化教研室
4
3.2 the transfer function
The transfer function of a block diagram is defined as the output divided by its input when represented in the Laplace domain with zero initial conditions. The transfer function G(s) of the block diagram shown in Fig. 3-1 is
9
电气信息工程学院自动化教研室
3.2 the transfer function
In summary, we observe that for cascaded elements the overall transfer function is equal to the product of the transfer function of each element, whereas the overall transfer function for parallel elements is equal to the sum of the individual transfer function. When a control system is represented in block diagram form we have not only forward paths but feedback paths as well. By giving due consideration to the direction of the signals we can derive a single transfer function to represent the entire system. This overall transfer function will be seen to be the ratio of the input and the output of the entire system.
Overview of control technology
Chapter 3 Control System representation
电气信息工程学院 自动化教研室
1
Chapter 3
Control System Representation
3.1 introduction 3.2 the transfer function 3.3 closed loop systems
Y ( s ) G 3 ( s ) X 3 ( s ) G 3 ( s )[ G 2 ( s ) X
2
( s )] G 3 ( s ) G 2 ( s ) G 1 ( s ) X 1 ( s )
which can be written as
Y (s) X 1 (s)
G 3 ( s )G 2 ( s )G 1 ( s ) G ( s )
电气信息工程学院自动化教研室
6
3.2 the transfer function
X 1(s) G 1(s) X 2(s) G 2(s) X 3(s) Y(s ) G 3(s) X 1(s) Y(s ) G (s) (b) F ig . 3 - 2 C a s c a d e d e le m e n ts (a)
电气信息工程学院自动化教研室
For applications where it is required to generate a signal which is the sum of two signals we define a summer or summing junction as shown in Fig.3-3a. If the difference is required, then we define a subtractor as shown in Fig. 3-3b. Subtractors are often called error detecting devices since the output signal is the difference between two signals of which one is usually a reference signal. Examples of several components used for summing and subtracting signals were given in the previous chapter.
电气信息工程学院自动化教研室
3
3.1 introduction
As an alternate way of system representation in the last chapter we also obtained a set of first-order differential equations. Later in this chapter we shall use such a set to show how a control system can be compactly represented in matrix notation. Such a representation is also called state space representation and the variables used are known as state variables. We will show that such a representation is directly related to the governing firstorder differential equations as well as the system transfer function. The analysis of control systems using the state space representation constitutes what is referred to as the modern method.
Y ( s ) [ G 1 ( s ) G 2 ( s ) G 3 ( s )] X ( s )
The overall transfer function shown in Fig.3-4b is
Y (s) X (s) G (s)
where
G (s) G1 (s) G 2 (s) G 3 (s)
The overall transfer function then is simply the product of individual transfer functions as shown in Fig. 3-2b.
电气信息工程学院自动化教研室 7
3.2 the transfer function
X
2
(s)
X 1 (s) X X
3 2
G1 (s) G 2 (s) G 3 (s)
X
2
(s) G1 (s) X 1 (s)
(s) (s)
X 3 (s) G 2 (s) X
2
(s)
Y (s) X
3 (s)
Y (s) G 3 (s) X 3 (s)
and substitution yields
电气信息工程学院自动化教研室
8
3.2 the transfer function
The combination of block diagrams in parallel is shown in Fig. 3-4a. Form the definition of the transfer function we have
电气信息工程学院自动化教研室
5
3.2 the transfer function
We have seen how the transfer function of an individual component can be obtained in the previous chapter. Owing to the occurrence of many transfer functions in series (or cascade) and parallel connections it is necessary that we have rules to combine them systematically. Consider the block diagram of cascaded elements shown in Fig. 3-2a. From the definition of a transfer function we have
X (s) Y (s) G (s)
Here the path of the signals X(s) and Y(s) is a forward path.
Y (s) G (s) X (s)
F ig .3 -1 T r a n s f e r f u n c tio n o f a b lo c k d ia g r a m
X 1 (s ) + + X 1 (s )+ X 2 (s ) X 1 (s ) + X 1 (s )-X 2 (s )
X 2 (s ) (a ) Sum m er
X 2 (s ) (b ) S u b tra c to r (E rro r d e te c tin g d e v ic e )
F ig .3 -3 A d d itio n o r s u b tra c tio n o f s ig n a ls
ห้องสมุดไป่ตู้