串口流控制
nodemcu lua 串口指令

一、概述在使用NodeMCU开发板进行Lua编程时,串口通信是非常常见的操作。
通过串口通信,可以实现与其他设备的数据交换,包括传感器、显示屏、电脑等。
本文将介绍NodeMCU Lua编程中的串口指令,包括串口初始化、发送数据、接收数据等操作,帮助读者更好地掌握串口通信的方法和技巧。
二、NodeMCU串口介绍NodeMCU是一款基于ESP8266芯片的开源物联网评台,它集成了Wi-Fi模块和微控制器,能够方便地进行无线通信和控制。
在NodeMCU开发板上,一般会提供有串口接口,通过串口通信可以实现与其他设备的数据交换。
三、NodeMCU串口初始化1. 串口初始化函数在NodeMCU Lua编程中,要使用串口通信,需要先对串口进行初始化。
串口初始化的函数为“uart.setup(id, baud, data_bits, parity, stop_bits, flow_control)”。
参数说明:id:串口编号,一般为1或2baud:波特率,常用的有9600、xxx等data_bits:数据位,一般为8位parity:校验位,一般为uart.PARITY_NONEstop_bits:停止位,一般为uart.STOPBITS_1flow_control:流控制,一般为uart.FLOW_NONE2. 串口初始化示例要对串口1进行初始化,波特率为9600:uart.setup(1, 9600, 8, uart.PARITY_NONE, uart.STOPBITS_1, uart.FLOW_NONE)四、NodeMCU串口发送数据1. 串口发送函数串口初始化完成后,就可以使用串口发送数据了。
串口发送数据的函数为“uart.write(id, data, ...)”。
参数说明:id:串口编号,与初始化时一致data:要发送的数据,可以是字符串或者数值...:可以传入多个参数,依次发送2. 串口发送示例要向串口1发送“Hello, World!”:uart.write(1, "Hello, World!")五、NodeMCU串口接收数据1. 串口接收函数除了发送数据,NodeMCU还可以通过串口接收外部设备发送过来的数据。
串口的基本原理

串口的基本原理串口是一种用于在设备之间进行数据传输的通信接口。
它是一种基于串行数据传输的通信方式,与并行通信相对。
串口使用一根线缆进行数据传输,其中包含一个发送线和一个接收线。
数据以一个位一个位地顺序传输,称为串行传输。
在串口通信中,数据从发送方通过发送线逐位发送,然后通过接收线逐位接收到接收方。
串口通信涉及以下几个基本原理:1. 通信协议:串口通信需要使用一种协议来规定数据的传输格式和通信规则。
常用的串口通信协议包括RS-232、RS-485、USB等。
协议规定了数据的起始位、数据位、校验位和停止位等信息。
2. 波特率:波特率是指每秒钟传输的位数,用来衡量串口通信的速度。
波特率越高,传输速度越快,但也需要更高的硬件要求。
发送方和接收方必须使用相同的波特率才能正常通信。
3. 校验位:校验位用于检测数据传输是否出错。
常用的校验方式包括奇偶校验、偶校验和无校验。
接收方通过校验位验证数据的准确性,并在发现错误时进行纠正或报告。
4. 数据流控制:数据流控制用于管理数据的发送和接收,以避免数据传输过程中的数据丢失或冲突。
常用的数据流控制方式包括硬件流控制和软件流控制。
5. 缓冲区:串口通信中的发送方和接收方都使用内部缓冲区来管理数据传输。
缓冲区用于临时存储待发送或接收的数据,以便在合适的时间进行数据传输。
需要注意的是,串口通信需要发送方和接收方的硬件和软件支持,如串口芯片、驱动程序等。
在编程时,可以使用特定的串口通信库或API来控制串口的打开、读取和写入操作。
总的来说,串口通信通过顺序传输数据位,结合通信协议、波特率、校验位、数据流控制等技术,实现设备之间的数据传输。
这使得串口通信在许多领域中广泛应用,如嵌入式系统、工业自动化、通信设备等。
串口标准-流控制(RTS CTS DTR DSR )小解
DB9 只有 9 根线,遵循 RS232 标准。定义如下: DTR,DSR------DTE 设备准备好/DCE 设备准备好。主流控信号。 RTS,CTS------请求发送/清除发送。用于半双工时,收发切换。属于辅助流控信号。半双工 的意思是说,发的时候不收,收的时候不发。那么怎么区 分收发呢?缺省时是 DCE 向 DTE 发 送数据,当 DTE 决定向 DCE 发数据时,先有效 RTS,表示 DTE 希望向 DCE 发送,一般 DCE 不 能马上转换收发状 态,DTE 就通过监测 CTS 是否有效来判断可否发送,这样避免了 DTE 在 DCE 未准备好时发送所导致的数据丢失。 全双工时,这两个信号一直有效即可。
以下是几句胡言乱语 最近在捣鼓一个et 的内容。看了上面的内容,我不知道各位明白了几分,如果觉得都明白了,就不用看我废话了。 还是先引用一些文字,来自 Telit 公司 GM862 QUAD/PY 的数据手册 Pin Signal I/O Function 20 C103/TXD I Serial data input (TXD) from DTE 29 C106/CTS O Output for Clear to send signal (CTS) to DTE 33 C107/DSR O Output for Data set ready signal (DSR) to DTE 37 C104/RXD O Serial data output to DTE 43 C108/DTR I Input for Data terminal ready signal (DTR) from DTE 45 C105/RTS I Input for Request to send signal (RTS) from DTE 注意上面各个功能的 I/O 的方向,看到这些缩写的全称,结合信号流向,是不是更容易理解呢 大笑 DTE 是数据发送的主动方,DCE 是数据的接受方。 CTS 是让 DTE 明白的,也就是说 DCE 需要把自己的 CTS 给 DTE 看,让他知道 DEC 已经准备好 接受数据了。 RTS 是 DTE 给 DCE 看的,告诉 DCE,DTE 有数据要发。
串口通信模块的信息和使用

串口通信模块的信息和使用一、串口通信模块的基本信息1.主要功能:串口通信模块主要用于实现串行数据的传输和接收。
它能将并行数据转为串行数据进行传输,并将接收到的串行数据再转为并行数据。
可通过串口控制器来控制通信的波特率、数据位、停止位和奇偶校验位等参数。
2.常见串口接口:如RS-232、RS-485、TTL等。
RS-232是最为常见的串口接口,一般用于个人电脑和外设的连接。
RS-485是用于多点通信的串口接口,可同时连接多个设备。
TTL串口是指以逻辑电平为3.3V或5V的串口接口,一般用于单片机和其他外设的连接。
3.通信原理:串口通信模块通过串口控制器来实现数据的传输和接收。
发送端将并行数据转为串行数据,并通过串口线将数据发送给接收端。
接收端接收到数据后,通过串口控制器将串行数据转为并行数据。
二、串口通信模块的使用1.硬件连接:首先,需要将串口通信模块连接到设备的串口接口上。
通常需要使用串口线将模块的发送引脚连接到设备的接收引脚,同时将模块的接收引脚连接到设备的发送引脚。
还需要连接好地线,以提供电路的共地参考。
3.编程实现:使用串口通信模块时,需要编写相应的程序来实现数据的传输和接收。
对于发送数据,可以通过向串口控制器的发送寄存器写入需要发送的数据。
对于接收数据,可以通过读取串口控制器的接收寄存器来获取接收到的数据。
4.错误处理:在使用串口通信模块时,可能会出现一些错误情况,如数据丢失、通信超时等。
为了确保数据的可靠传输,需要进行相应的错误处理,如重新发送数据、增加数据校验等。
5.调试工具:在开发和调试串口通信模块时,可以使用串口调试工具来进行测试和调试。
串口调试工具可以显示串口发送和接收的数据,并提供相应的调试功能,如发送数据、接收数据、改变通信参数等。
6.其他功能:除了基本的数据传输和接收,串口通信模块还可以实现其他功能,如流控制、中断处理等。
流控制可以通过软件或硬件的方式来实现,用于控制数据的传输速率。
串口通信基本连线操作以及流控制方式
串口通信基本连线操作以及流控制方式目前较为常用的串口有9针串口(DB9)和25针串口(DB25),通信距离较近时(<12m),可以用电缆线直接连接标准RS232端口(RS422,RS485较远),若距离较远,需附加调制解调器(MODEM)。
最为简单且常用的是三线制接法,即地、接收数据和发送数据三脚相连,本文只涉及到最为基本的接法,且直接用RS232相连。
1.DB9和DB25的常用信号脚说明9针串口(DB9)25针串口(DB25)针号功能说明缩写针号功能说明缩写1 数据载波检测DCD 8 数据载波检测DCD2 接收数据RXD3 接收数据RXD3 发送数据TXD 2 发送数据TXD4 数据终端准备DTR 20 数据终端准备DTR5 信号地GND 7 信号地GND6 数据设备准备好DSR 6 数据准备好DSR7 请求发送RTS 4 请求发送RTS8 清除发送CTS 5 清除发送CTS9 振铃指示DELL 22 振铃指示DELL2.RS232C串口通信接线方法(三线制)首先,串口传输数据只要有接收数据针脚和发送针脚就能实现:同一个串口的接收脚和发送脚直接用线相连,两个串口相连或一个串口和多个串口相连·同一个串口的接收脚和发送脚直接用线相连对9针串口和25针串口,均是2与3直接相连;·两个不同串口(不论是同一台计算机的两个串口或分别是不同计算机的串口)上面表格是对微机标准串行口而言的,还有许多非标准设备,如接收GPS数据或电子罗盘数据,只要记住一个原则:接收数据针脚(或线)与发送数据针脚(或线)相连,彼此交叉,信号地对应相接,就能百战百胜。
3.串口调试中要注意的几点:串口调试时,准备一个好用的调试工具,如串口调试助手、串口精灵等,有事半功倍之效果;强烈建议不要带电插拨串口,插拨时至少有一端是断电的,否则串口易损坏。
单工、半双工和全双工的定义如果在通信过程的任意时刻,信息只能由一方A传到另一方B,则称为单工。
串口通信协议
串口通信协议一、引言串口通信协议是在计算机和外部设备之间进行数据传输的一种标准规定。
随着计算机和外部设备的快速发展,串口通信协议在信息交互中扮演着重要的角色。
本文将介绍串口通信协议的基本原理、常见的串口通信协议以及串口通信的应用场景。
二、串口通信协议的基本原理串口通信协议基于串行通信原理,其中传输的数据是一个位一个地按照顺序进行发送和接收。
串口通信协议一般包含以下几个方面的内容:1.物理层:串口通信协议需要确定使用哪种物理接口进行数据传输,常见的物理层接口有RS-232、RS-485、TTL等。
2.数据帧:数据帧是串口通信协议中最基本的单位,在传输过程中需要对数据进行分割和整合。
一个完整的数据帧一般包含起始位、数据位、校验位和停止位等。
3.波特率:波特率是指串口通信中单位时间内传输的比特数,波特率越高,传输速度越快。
常见的波特率有9600、115200等。
4.流控制:流控制用于控制数据的传输速度,防止数据丢失和冲突。
常见的流控制方式有硬件流控制和软件流控制。
三、常见的串口通信协议1.RS-232协议:RS-232是一种常见的串口通信协议,广泛应用于计算机和外部设备之间的数据传输。
它采用DB9或DB25接口,支持全双工通信和多设备之间的连接。
2.RS-485协议:RS-485是一种多点通信协议,支持半双工通信和多设备之间的连接。
它采用两线制,可以实现长距离的数据传输。
3.TTL协议:TTL是一种电平标准,常用于单片机与外部设备之间的串口通信。
TTL信号电平波动小,可靠性高,但传输距离较短。
四、串口通信的应用场景串口通信在各个领域都有广泛的应用,以下是其中几个常见的应用场景:1.工业自动化:串口通信被广泛应用于工业自动化领域,用于连接和控制各种工业设备,如PLC控制器、传感器、执行器等。
2.智能家居:串口通信在智能家居系统中扮演重要的角色,用于连接和控制家庭中各种智能设备,如智能开关、智能灯具等。
3.医疗设备:串口通信在医疗设备中广泛应用,用于连接和控制医疗仪器,如心电图仪、血压计等。
串口流通量控制(流控,flowcontrol)
串⼝流通量控制(流控,flowcontrol)流通量控制(流控,flow control)流控是在通信过程中,为了防⽌数据丢失⽽采取的⼀种平衡发送和接收的机制。
流控可以确保发送设备发送的信息量不会超过接收设备所能处理的信息量。
流控有两种实现⽅式,即硬件流控和软件流控注意:CM 1241 RS232 接⼝通信模块⽀持硬件流控可软件流控CM 1241 RS485 接⼝通信模块不⽀持流控硬件流控(RTS、CTS)硬件流控制通过请求发送(RTS, Request To Send) 和允许发送(CTS, Clear To Send) 通信信号来实现。
对于RS232CM1241,RTS 信号从引脚7 输出,⽽CTS 信号通过引脚8 接收。
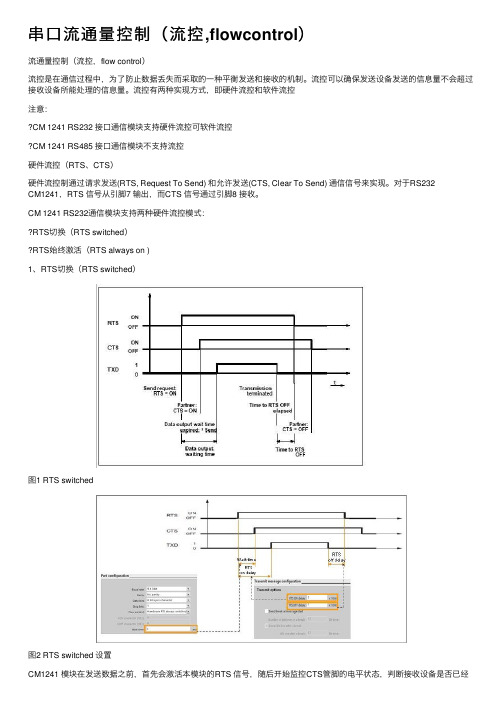
CM 1241 RS232通信模块⽀持两种硬件流控模式:RTS切换(RTS switched)RTS始终激活(RTS always on )1、RTS切换(RTS switched)图1 RTS switched图2 RTS switched 设置CM1241 模块在发送数据之前,⾸先会激活本模块的RTS 信号,随后开始监控CTS管脚的电平状态,判断接收设备是否已经准备好接收数据。
当CTS 变为有效信号后,CM1241 模块开始发送数据。
在数据传输过程中CTS 信号必须⼀直保持有效,如果CTS 信号变为⽆效,CM1241 模块⽴即停⽌发送。
RTS 信号被激活后,如果在指定的等待时间内CTS 信号没有被激活,CM1241 模块会终⽌数据传送并返回错误到⽤户程序。
2、RTS始终激活(RTS always on )⼀些通信设备(例如电话调试解调器)监控RTS 信号并将其作为允许发送信号,仅在RTS 处于激活状态时才向CM1241 模块发送数据。
如果RTS 处于⾮激活状态,则不向CM1241 模块发送数据。
与这类设备通信时,需要在S7-1200 设备组态中选择“RTS始终激活”。
注意:选择“RTS 始终激活”后,CM1241 会将RTS 信号⼀直激活,即使CM模块已⽆法接收字符,RTS 信号也不会复位,因此与CM1241 通信的设备必须确保⼀次发送的数据量⼩于CM 模块接收缓冲区的⼤⼩(每个CM 模板的接收缓冲区为1KB)。
UART中的硬件流控RTS与CTS
UART中的硬件流控RTS与CTS5/23/2013 5:13:04 PM at rock-chips inshenzhen最近太忙了,没时间写对Ucos-II的移植,先将工作中容易搞错的一个知识点记录下来,关于CTS与RTS 的。
在RS232中本来CTS 与RTS 有明确的意义,但自从贺氏(HAYES ) 推出了聪明猫(SmartModem)后就有点混淆了,不过现在这种意义为主流意义的,各大芯片制造厂家对UART控制器的流控基本采用HAYES MODEM流控解释。
在RS232中RTS 与CTS 是用来半双工模式下的方向切换,本文不解释;如果UART只有RX、TX两个信号,要流控的话只能是软流控;如果有RX,TX,CTS,RTS 四个信号,则多半是支持硬流控的UART;如果有RX,TX,CTS ,RTS ,DTR,DSR 六个信号的话,RS232标准的可能性比较大。
SIMCOM公司对RTS/CTS的解释:(要注意区别是不是讲串口支持硬流控的RTS/CTS,别看为益,在和瑞芯微调试硬件流控时,别这个非主流的解释搞得晕头转向的,下面用灰色小字体表示)RTS是模块的输入端,用于MCU通知模块,MCU是否准备好,模块是否可向MCU发送信息,RTS的有效电平为低。
CTS是模块的输出端,用于模块通知MCU,模块是否准备好,MCU是否可向模块发送信息,CTS的有效电平为低HAYES Modem中的RTS ,CTS 是用来进行硬件流控的。
现在通常UART的RTC、CTS的含义指后者,即用来做硬流控的。
硬流控的RTS、CTS:(现在做串口使用RTS/CTS必看内容,因为MTK/)RTS (Require ToSend,发送请求)为输出信号,用于指示本设备准备好可接收数据,低电平有效,低电平说明本设备可以接收数据。
CTS (Clear ToSend,发送允许)为输入信号,用于判断是否可以向对方发送数据,低电平有效,低电平说明本设备可以向对方发送数据。
串口标准协议
串口标准协议一、数据传输格式串口数据传输通常采用异步方式,即数据传输速率与时钟频率无关,每个数据位后面都有一个特定的位作为起始位和停止位。
常见的数据格式有:7E1、7O1、8E1、8O1等。
其中,7E1表示7个数据位,1个起始位,1个奇校验位和1个停止位;8E1表示8个数据位,1个起始位,1个偶校验位和1个停止位。
二、数据传输速率串口数据传输速率通常以波特率表示,即每秒传输的位数。
常见的波特率有:9600、19200、38400、57600、115200等。
波特率的选择应根据实际需求和通信距离进行选择。
三、数据流控制串口数据流控制是为了防止数据丢失或溢出而采取的措施。
常用的数据流控制方式有硬件流控制和软件流控制两种。
硬件流控制是通过RTS/CTS线进行控制,软件流控制则是通过XON/XOFF字符进行控制。
四、错误检测与纠正串口通信过程中可能会出现数据传输错误的情况,因此需要进行错误检测与纠正。
常见的错误检测方式有奇偶校验和CRC校验等。
奇偶校验是在数据位后面添加一个校验位,使得整个数据位的1的个数为偶数或奇数;CRC校验则是通过模2除法运算对数据进行校验。
纠正则是通过反向散列运算对数据进行纠正。
五、设备识别与通信规则在串口通信中,需要确定主设备和从设备之间的通信规则,包括设备地址、命令格式、响应格式等。
设备地址用于标识不同的设备,命令格式用于发送指令,响应格式用于接收响应。
六、命令与响应模式串口通信中的命令与响应模式是一种约定,规定了主设备和从设备之间的数据交互方式。
命令由主设备发送给从设备,从设备根据命令执行相应的操作,并将结果以响应的形式返回给主设备。
七、电源管理在串口通信中,电源管理也是需要考虑的一个重要方面。
为了降低功耗,可以采用空闲模式和休眠模式等电源管理模式,以及使用低功耗器件和电路设计等技术手段。
八、接口电气特性串口通信接口的电气特性包括信号线数、信号极性、信号电平、信号驱动能力等。
串口通信协议详解
串口通信协议详解1.数据传输格式:串口通信协议需要定义数据的传输格式,包括数据位、停止位、校验位等。
数据位指的是每个数据字节中有效位的个数,常用的有5位、6位、7位和8位。
停止位指的是传输结束时插入的位数,常用的有1位和2位。
校验位用于检测和纠正数据传输中可能发生的错误,常用的有奇偶校验和无校验。
2.数据的起始和结束标志:为了确保数据的完整性,串口通信协议通常会使用起始和结束标志来标识数据的开始和结束位置。
常用的起始标志有帧起始符、帧头等,在数据传输的开头进行标识。
结束标志常用的有帧结束符、帧尾等,在数据传输的结尾进行标识。
3.数据的流控制:串口通信协议还需要定义数据的流控制,以确保发送方和接收方之间的数据传输能够同步进行。
常用的流控制方式有硬件流控制和软件流控制。
硬件流控制使用硬件信号线进行控制,包括RTS(请求发送)和CTS(清除发送)两个信号。
软件流控制则是通过发送特定的控制字符来实现。
4.数据的错误检测和纠正:串口通信协议还需要定义数据的错误检测和纠正机制,以确保数据的准确传输。
常用的错误检测和纠正方式有循环冗余校验(CRC)、纵向冗余校验(LRC)、海明码等。
这些机制可以在数据传输过程中检测和纠正错误的数据。
5.数据的传输方式:串口通信协议可以定义数据的传输方式,包括同步传输和异步传输。
同步传输是指传输的数据按照固定的时钟信号进行同步,可以提高数据传输的速率和可靠性。
异步传输是指传输的数据未按照固定的时钟信号进行同步,对传输速率要求不高的应用中常用。
6.数据的控制命令:串口通信协议可以定义数据的控制命令,用于控制数据的传输和处理。
控制命令可以包括数据的请求、响应、确认、拒绝等操作,用于确保数据的正确传输和处理。
串口通信协议在工业自动化、通信设备、电子设备等领域有着广泛的应用。
不同的应用场景和需求会使用不同的串口通信协议,如MODBUS、RS-232、RS-485等。
这些协议都是根据不同的需求和应用场景而定义的,具有各自的特性和优势。
串口流控cts与rts电平逻辑
串口通信是电子设备中常见的一种通信方式,其流控功能对于保证通信数据的可靠性和稳定性起着至关重要的作用。
而CTS和RTS是串口通信中常用的流控信号,它们的电平逻辑对于串口通信的正常运行有着重要的影响。
本文将深入探讨CTS和RTS的电平逻辑,帮助读者更好地理解串口流控的工作原理和实际应用。
一、CTS信号1. CTS的全称是Clear To Send,它是串口通信中用于数据传输控制的一种信号。
当设备收到CTS信号为高电平时,表示对方设备准备好接收数据,可以进行数据传输操作。
2. CTS信号的电平逻辑一般为低电平有效,即当CTS信号为低电平时,表示对方设备还未准备好接收数据,需要等待CTS信号变为高电平后再进行数据传输。
3. 在实际应用中,CTS信号通常由对方设备控制,发送设备需要等待对方设备的CTS信号为高电平后才能开始发送数据,以确保数据传输的可靠性。
二、RTS信号1. RTS的全称是Request To Send,它是串口通信中用于数据发送控制的一种信号。
当发送设备需要向对方设备发送数据时,会通过RTS信号通知对方设备准备好接收数据。
2. RTS信号的电平逻辑也通常为低电平有效,即当发送设备需要发送数据时,会将RTS信号置为低电平,对方设备收到低电平的RTS信号后会准备好接收数据。
3. 与CTS信号类似,RTS信号通常由发送设备控制,接收设备需要等待发送设备的RTS信号为低电平后才能准备好接收数据。
三、CTS与RTS的配合1. 在实际串口通信中,CTS和RTS信号通常是配合使用的,用于保证数据传输的双向可靠性。
2. 当发送设备需要发送数据时,会将RTS信号置为低电平,通知接收设备准备好接收数据;接收设备接收到RTS信号后,如果准备好接收数据,则会将CTS信号置为高电平,通知发送设备可以开始发送数据。
3. 当发送设备收到CTS信号为高电平后,即可开始发送数据;接收设备在接收完数据后,可能会将CTS信号重新置为低电平,通知发送设备停止发送数据,以确保数据的正确接收。
投影机RS-232串口控制指南
投影机RS-232串口控制指南一、接口定义说明RS-232二、数据通信参数1、波特率:通过该端口1秒钟最大可以传输的数据量,单位:bit/s2、数据位:通过该端口1次可以传输的数据量,一般:7位、8位3、停止位:略4、校验方式:无效验(None)偶校验(Even)奇校验(Odd)0校验(Space)1校验(Mark)三、通信方式1、不带握手信号目前此种传输方式应用于市面上绝大部分投影机RS-232控制,典型接线如下:中控RS-232 投影机RS-2323(TXD) RXD5(GND) GND2、带握手信号从实践经验来看需要用到握手信号端来控制的投影机以EPSON比较常见,典型接线如下:中控RS-232 投影机RS-2323(TXD) RXD4(DTR) DSR5(GND) GND三、中控设置(以DHD-180中控为例)1、设置向导程序有投影机控制代码此种设置流程如下:2、设置向导程序没有投影机控制代码目前经过我司多年资料的收集合整理,在中控设置向导程序中覆盖了90%以上的投影机RS-232控制代码,用户在安装、调试时也非常方便,设置方法同上;对于设置向导软件库中没有投影机控制代码的投影机相对比较少,此种设置方法完全同红外设置,在此我们不做详细介绍。
四、投影机RS-232接口(附件)厂商型号接口类型接口定义备注EPSON EMP600EMP800EMP811EMP820EMP5600EMP7600EMP7700EMP8000EMP9000EMP7300公头Rs-2322RXD、5GND6DSR9600N8安装设置软件安装DHD-180软件,同目录有控制码驱动升级包,请安装运行设置软件选择编程口选择按向导设置选择控制方式选择投影及型号传输数据完成EPSON EMP5350EMP5550EMP7250EMP7350EMP7550EMP8100EMP8150EMP8200EMP9100母头9RXD、13GND11DSR9600N8随机附带有RS-232转接线SANYO XU-358CXU-35XU-30XU-37XU-31XU-32XP-41XP-41LPLV70SW10母头Prot1RXD、4GND 19200N8随机附带转接线1RXD不通,需另做线XP-10NXP-21NXP-35XP-45公头Rs-2323RXD、5GND 19200N8EF10NX9000NX2RXD、5GND 19200N8ASK ASK C5C20C60C80C85C90C95母头Mouse6RXD、8GND 9600N8C100C105母头Mouse6RXD、8GND 9600N8A8+A9+A10+ 6RXD、8GND 1200N8 C300 2RXD、5GND 9600N8PLUS U2-1130U2-815C 3RXD、5GND9600N8随机带RS-232转接线SONY PX11PX32PX31FE100U 公头Rs-232 2RXD、5GND 38400N8PX11校验:偶PROXIMA DP6100DP6155DP6150DP6105DP8000S540X540Prot母头6RXD、8GND 9600N8DP9270DP9290DP92591RXD、4GND5CTS19200N8DP6800DP6870公头Control13RXD、10GND 19200N8DP9240DP9260DP9260+DP9280A V9400A V9400+A V9410A V9500A V9550公头Rs-2322RXD、5GND 19200N8NEC MT850MT840MT840EMT1040MT1040EMT1045MT1045EMT1050MT1055GT950LT84LT85LT140LT150LT150ZLT75ZLT156VT540VT440母头Prot1RXD、4GND 38400N8VT54VT650 1RXD、4GND 19200N83M MP7640MP8670MP8725MP8730MP8740MP8745MP8746MP8747MP8770公头Control13RXD、10GND 19200N8(需要调整)MP8650MP8660母头Prot4GND、5RXD 有转成RS-232的配现9600N8(需要调整)MP8780 9GND、5RXDEIKI LC-X986LC-NB4LC-NB4SLC-NB1LC-XNB1LC-XNB3SLC-XNB3WLC-NB3WELC-NB3E4GND、1RXD 19200N8EIKI LC-XNB4LC-XNB4MLC-X999LC-X984LC-XM1/2LC-XM1LC-M3LC-X1100LC-X1000LC-X985LC-X990LC-X983LC-XGA980LC-XGA982LC-XGA870LC-XGA970LC-XGA860LC-XC1母头Prot4GND、1RXD 19200N8LC-X2ULC-X4&LLC-SX4LLC-SX3/2/1LC-X3/21ALC-X1LC-XT2LC-UXT1公头Rs-2325GND、2RXD 19200N8SHARP XG-E3000UXG-P10XUXG-C40XUXG-E1200UXG-E3500UXG-NV1UXG-NV2UXG-NV3UXG-NV3XBXG-NV4SUXG-NV6XUPG-C30XUPG-D210UPG-C30XU公头Rs-2325GND、2RXD 9600N8有RS-232转接配线XG-P20XUXG-V10WU 5GND、2RXD 9600N8HITACHI CP-950W/ECP-955W/ECP-S840WCP-S845WCP-S860W/ECP-X935W/E/DCP-X940W/ECP-X958CP-X960CP-X970公头Control10GND、13RXD9600N8需要调整CP-X980CP-X985CP-1000CP-X2000CP-X380WCP-X430WCP-X990WCP-S310WCP-X325WCP-S225WCP-S275WCP-S5500WCP-S370WCP-HX208019200N8需要调整MITSUBISHI LVP-X70ULVP-X50ULVP-S50ULVP-SA51LVP-SL1/2LVP-XL1XLVP-XL5LVP-XL1/2LVP-SL5LVP-X390ULVP-X400BULVP-X490LVP-X500LVP-S490LVP-X50/70LVP-X80母头RS-232C4GND、1RXD9600N8 LVP-XD200LVP-SD200LVP-XD300RS-232C4GND、1RXDTOSHIBA LVP-X250ULVP-S250URS-232CRS-232CControl母头5GND、2RXD5GND、3RXD 9600N8 TLP-450E/UTLP-451E/UTLP-650E/UTLP-651E/UTXP-450TXP-451TXP-651TXP-650TLP-680UTLP-681UTLP-650ATLP-651ATLP-470UTLP-471UTLP-670UTLP-671UTLP-X10E/UTLP-X11E/UTLP-X20E/UTLP-X21E/UTLP-550TLP-551TLP-250TLP-251TLP-780UTLP-781UTLP-B2URS-232CControl母头5GND、1RXD 9600N8PTL595UPTL592U5GND、2RXDPANASONIOC PANASONIOC PT-L720UPT-L520UPT-L771XU/UPT-L701XU/UPT-L511XU/UPT-L501XU/UPT-L6500UPT-L6600URS-232C5GND、3RXD9600N8PTL556UPT-L555URS-232C4GND、5RXD 9600N8INFOCUS LP500LP530LP9XXLP1000LP470/BLP770LP255LP340LP350LP7XXLP790RS-232C 5GND、2RXD 9600N89600: 波特率N:无校验8:数据位小结:通过多方面资料的收集和整理终于将此《投影机RS-232控制指南》告一段落,在收集和整理过程当中难免有些疏忽或遗漏的地方,望广大的经销商技术服务人员和工程人员在具体工程安装、调试时如果出现投影机控制不了,最好的解决办法是查看《投影机说明书》RS-232具体的接口定义;如果在判断接线没有问题的情况下,可以尝试调整投影机RS-232通讯参数,目前发现需要调整的有3M、日立的投影机比较常见。
串口调试常用的参数

串口调试常用的参数串口调试是在嵌入式系统开发中常用的一种调试方式,可以通过串口与目标设备进行通信,实时监控设备的状态和调试程序的运行。
下面将介绍串口调试常用的参数。
1. 波特率(Baud Rate):波特率是指每秒传送的比特数,也就是串口通信的速度。
常见的波特率有9600、115200等。
在进行串口通信时,发送方和接收方的波特率必须保持一致,否则无法正常通信。
2. 数据位(Data Bits):数据位指的是每个字节传输时所使用的二进制位数。
常见的数据位有5、6、7、8位。
一般情况下,使用8位数据位即可满足大部分通信需求。
3. 停止位(Stop Bits):停止位是指在每个字节传输结束时所发送的一位信号。
常见的停止位有1位和2位。
一般情况下,使用1位停止位即可。
4. 校验位(Parity Bit):校验位用于检验数据传输的正确性。
常见的校验位有奇校验位、偶校验位和无校验位。
奇校验位时,校验位的值设置为使数据位的总数为奇数;偶校验位时,校验位的值设置为使数据位的总数为偶数;无校验位时,不进行校验。
5. 数据流控制(Flow Control):数据流控制用于控制数据的传输速率,以避免数据丢失或溢出。
常见的数据流控制方式有硬件流控制和软件流控制。
硬件流控制使用RTS(请求发送)和CTS(清除发送)信号进行控制,而软件流控制则是通过发送特定的控制字符来实现。
6. 串口模式(Serial Mode):串口模式指的是串口通信的工作模式,主要包括两种方式:全双工和半双工。
全双工模式可以同时进行发送和接收操作,而半双工模式只能进行发送或接收操作。
7. 缓冲区大小(Buffer Size):缓冲区大小是指串口接收和发送数据的缓冲区大小。
较大的缓冲区可以提高数据传输的效率,但也会增加系统资源的占用。
8. 数据格式(Data Format):数据格式包括数据的编码方式和数据的传输格式。
常见的编码方式有ASCII码和二进制码,常见的传输格式有字符模式和二进制模式。
linux串口配置参数
linux串口配置参数Linux操作系统提供了丰富的串口资源,支持通过串口与外部设备进行通信。
在Linux下配置串口参数需要关注以下几个关键要素:串口号、波特率、数据位、停止位、校验位和流控制等。
下面将详细介绍如何配置这些参数。
一、确定串口号在Linux系统中,每个串口设备都有一个唯一的串口号,可以通过ls/dev/tty*命令查看系统中的所有串口设备。
在配置串口参数之前,需要确定要使用的串口号。
通常,串口号以/dev/ttyS或/dev/ttyUSB开头,可以根据实际情况进行判断。
二、配置波特率波特率是串口通信中最基本的参数之一,它决定了数据传输的速度。
在Linux系统中,可以使用minicom或screen等终端仿真器进行串口通信,这些工具默认使用9600波特率。
可以根据实际需求进行调整,常见的波特率有115200、57600等。
可以使用cat/proc/stty串口文件查看当前配置的波特率。
三、设置数据位、停止位和校验位数据位、停止位和校验位是串口通信中的其他重要参数。
数据位决定了传输的数据位数,常见的有5、6、7和8位等;停止位决定了传输的停顿时间,常见的有1、1.5和2位等;校验位则用于检查数据传输过程中的错误,常见的有奇校验和偶校验等。
这些参数可以在终端仿真器的配置中进行设置,也可以使用stty命令进行全局配置。
四、启用流控制流控制用于控制数据传输过程中的流量,避免数据传输过快导致丢包或溢出等问题。
常见的流控制方式有软件流控制(xon/xoff)和硬件流控制(rts/cts)。
软件流控制通过检测串口输入流控制信号(xon/xoff)来实现流量控制;硬件流控制通过控制数据端口的电平来实现流量控制。
可以在终端仿真器的配置中启用相应的流控制方式。
五、测试配置效果完成串口参数配置后,可以通过串口通信测试来验证配置是否正确。
可以使用cat或echo命令将数据发送到串口设备,并使用另一终端仿真器接收数据,观察是否能够正常通信。
RS232转网口的流控功能介绍
RS232转网口的流控功能介绍1.RS232转网口的流控RS232转网口转换器ZLAN5103是支持RS232流控和网口流控的高性能转换器。
所谓流控即对数据流的速度进行控制,防止接收方缓冲区满的时候发送方继续发送数据引起数据的丢失。
RS232转网口中流控对于防止数据包丢失是相当重要的。
RS232和网口采用了不同的流控机制。
RS232的流控分为无流控、软件流控、硬件流控。
网口的流控一般采用TCP的窗口流控机制。
由于两种流控方式的不同,ZLAN5103在将RS232协议数据转换为网口协议数据的时候,也要进行流控方式的转换。
RS232的流控方式介绍如下:1.无流控:没有流控功能。
2.软件流控:软件流控也称之为XON/XOFF流控,使用控制字符XON、XOFF来实现。
在RS232数据通信过程中,如果发送方收到XOFF字符则停止发送数据,反之如果收到XON字符则重新开始发送数据。
XON一般定义为十六进制0x11,XOFF为十六进制0x13。
3.硬件流控:硬件流控又分为DSR/DTR流控和CTS/RTS流控。
硬件流控是通过硬件的高低电平来通知发送方,接收方的缓冲区是否快满了。
CTS/RTS流控时,RS232(DB9)的8引脚为RTS,7引脚为CTS。
DSR/DTR 流控时,RS232(DB9)的6引脚为DSR,4引脚为DTR。
网口流控方式:网口一般采用两种协议TCP协议和UDP协议。
其中UDP 协议是没有流控的,TCP协议采用窗口流控,即发送方知道接收方的接收缓冲区大小,发送方从而不会发送超过接收方接收能力的数据量,接收方也会定期告诉发送方窗口大小的变化。
ZLAN5103和ZLVircom相互配合实现RS232转网口的流控转化,例如当RS232给出硬件流控引脚高电平时(高电平表示开始流控),ZLAN5103的内嵌TCP/IP协议栈自动通知TCP窗口减少;反之当TCP窗口减少时ZLAN5103自动设置硬件流控引脚高为高电平。
串口工作原理

串口工作原理1. 什么是串口串口(Serial Port),也被称为COM口或RS-232接口,是一种用于进行数据传输的电脑接口。
它允许数字设备(如计算机、微控制器)通过一个或多个串行通信线路与其他设备进行通信。
2. 串口的基本结构串口主要有三个基本组成部分:•串行通信线路(Serial Communication Line)•串行通信接口(Serial Communication Interface)•串口驱动芯片(UART)串行通信线路是一对单向传输的数据线,通常由一根接收线(RX)和一根发送线(TX)组成。
串行通信接口则是连接计算机主机和串口设备的硬件接口,通常位于计算机主板上。
串口驱动芯片则是串口通信的核心部分,负责将计算机主机发送出去的并行数据转换成串行数据,以及将接收到的串行数据转换成并行数据给计算机主机处理。
3. 串口的工作模式串口工作时,通常采用全双工模式,即可以同时发送和接收数据。
串口设备与计算机主机之间通过数据线路进行数据传输,并通过握手信号进行同步控制。
串口通信的基本工作模式如下:•发送端(Transmitter)将并行数据转换成串行数据发送出去。
•接收端(Receiver)接收到串行数据后,将其转换成并行数据供计算机主机处理。
•发送端和接收端通过握手信号进行同步控制。
4. 串口的数据传输方式串口数据传输采用异步传输方式(Asynchronous Transmission),其中数据被分为一系列的帧进行传输。
每个数据帧由起始位(Start Bit)、数据位、校验位(Parity Bit)和停止位(Stop Bit)组成。
具体传输过程如下:•发送端在数据传输前先发送一个起始位,一般为逻辑低电平。
•然后发送数据位,数据位的个数取决于串口的设置,通常为8位。
•接下来是校验位,用于数据的验证和纠错。
可以选择校验位的类型,如奇校验、偶校验或不校验。
•最后是停止位。
在停止位时间内,发送端将数据线恢复到逻辑高电平,作为帧的结束信号,使接收端能够正确获取到整个数据帧。
串口硬件流控制的fifo阈值设置
串口硬件流控制的fifo阈值设置什么是串口硬件流控制?串口硬件流控制是通过发送和接收端之间的硬件信号来控制数据传输的过程。
在串口通信中,当发送缓冲区中的数据达到一定的阈值时,发送端会发送一个硬件信号给接收端,告知其暂停接收数据;当接收端处理完当前的数据后,会发送一个硬件信号给发送端,通知其继续发送数据。
这种流控制机制可以避免数据丢失和混乱,提高串口通信的可靠性。
为什么需要串口硬件流控制?在串口通信过程中,发送端和接收端的数据传输速度可能不同,或者在数据处理能力有限的情况下,接收端无法及时处理大量的输入数据。
这时,如果没有流控制机制,发送端会持续地向接收端发送数据,导致接收端无法进行及时处理,从而出现数据丢失或者混乱的问题。
使用串口硬件流控制可以解决上述问题,通过发送和接收端之间的硬件信号来告知数据的发送和接收状态,以达到数据的稳定传输。
同时,由于硬件流控制是基于硬件信号进行的,无需CPU的参与,对系统的资源消耗较小,因此在解决高速数据传输和实时性要求较高的应用场景上具有重要意义。
如何设置串口硬件流控制的fifo阈值?串口硬件流控制的fifo阈值设置可以根据具体的应用需求和硬件的支持情况来确定。
一般来说,串口的FIFO(First-In-First-Out)缓冲区大小是固定的,在设置硬件流控制的fifo阈值时,需要考虑到以下几个方面:1. 数据传输速率:根据串口的通信速率和系统的处理能力来确定fifo阈值。
通常情况下,如果发送端的数据传输速率远高于接收端的处理能力,可以适当增大fifo阈值,以减少流控制信号的发送频率,提高数据传输效率。
2. 数据容量需求:根据实际应用场景的数据容量需求来确定fifo阈值。
如果应用场景需要传输大量的数据或者要求数据的实时性较高,可以适当增大fifo阈值,以减少流控制信号的发送频率,提高数据传输效率;如果数据量较小或者对实时性要求不高,可以适当降低fifo阈值,以减少发送端和接收端之间的传输延迟。
串口编程DCB结构体参数配置详细说明
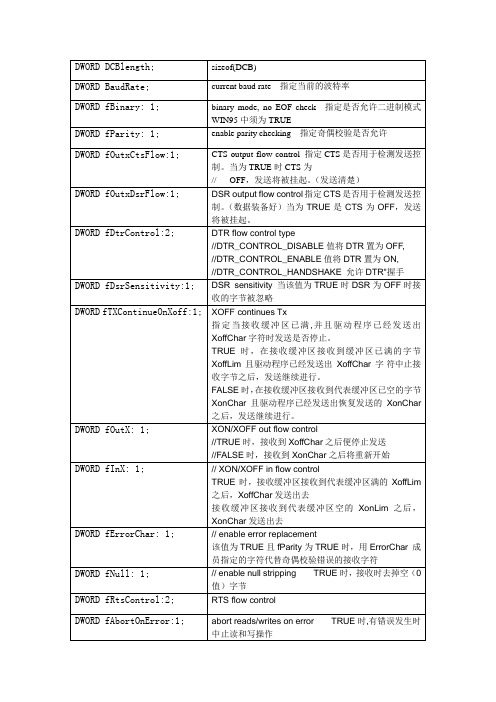
在这个结构中, 共有28个变量, 我把这些成员归类为几种.1. 串口的基本设置1) DWORD BaudRate; 波特率设置。
2) BYTE ByteSize; 数据位设置。
3) DWORD fParity: 1; TRUE时,支持奇偶检验。
4) BYTE Parity; 奇偶检验位的设置5) BYTE StopBits; 停止位的设置2. 流控制(Flow Control) 的设置流控制分为硬件流控制和软件流控制。
而硬件流控制又分为RTS/CTS和DTR/DSR两种。
而软件流控制,则是Xon/Xoff。
DTR/DSR 硬件流控制:1) DWORD fOutxDsrFlow:1; TRUE时,支持DSR流控制。
当DSR为OFF时,停止发送。
2) DWORD fDtrControl:2; DTR设置。
(置高/置低...)3) DWORD fDsrSensitivity:1; TRUE时,当DSR为OFF,则接收端忽略所有字符。
RTS/CTS 硬件流控制:4) DWORD fOutxCtsFlow:1; TRUE时,支持CTS流控制。
当CTS为OFF时,停止发送。
5) DWORD fRtsControl:2; RTS设置。
(置高/置低...)Xon/Xoff 软件流控制:6) DWORD fOutX: 1; 发送端支持Xon/Xoff。
7) DWORD fInX: 1; 接收端支持Xon/Xoff。
8) WORD XonLim; 当接收Buffer中的字符减少小XonLim规定的字符数,就发送Xon 字符,让对方继续发送。
9) WORD XoffLim; 接收Buffer达到XoffLim规定的字符数,就发送Xoff字符,让对方停止发送。
10)char XonChar; Xon 字符。
11)char XoffChar; Xoff 字符。
12)DWORD fTXContinueOnXoff:1; TRUE时,不管接收端是否Xoff,本方发送端持续发送。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
我们在编程时根据接收端缓冲区大小设置一个高位标志(可为缓冲区大小的75%)和一个低位标志(可为缓冲区大小的25%),当缓冲区内数据量达到高位时,我们在接收端将cts线置低电平(送逻辑0),当发送端的程序检测到cts为低后,就停止发送数据,直到接收端缓冲区的数据量低于低位而将cts置高电平。rts则用来标明接收设备有没有准备好接收数据[/COLOR]
1.流控制在串行通讯中的作用
这里讲到的“流”,当然指的是数据流。数据在两个串口之间传输时,常常会出现丢失数据的现象,或者两台计算机的处理速度不同,如台式机与单片机之间的通讯,接收端数据缓冲区已满,则此时继续发送来的数据就会丢失。现在我们在网络上通过modem进行数据传输,这个问题就尤为突出。流控制能解决这个问题,当接收端数据处理不过来时,就发出“不再接收”的信号,发送端就停止发送,直到收到“可以继续发送”的信号再发送数据。因此流控制可以控制数据传输的进程,防止数据的丢失。 pc机中常用的两种流控制是硬件流控制(包括rts/cts、dtr/cts等)和软件流控制xon/xoff(继续/停止),下面分别说明。
2.硬件流控制
硬件流控制常用的有rts/cts流控制和dt的电缆线连上,用rts/cts(请求发送/清除发送)流控制时,应将通讯两端的rts、cts线对应相连,数据终端设备(如计算机)使用rts来起始调制解调器或其它数据通讯设备的数据流,而数据通讯设备(如调制解调器)则用cts来起动和暂停来自计算机的数据流。这种硬件握手方式的过程为:
。
常用的流控制还有还有dtr/dsr(数据终端就绪/数据设置就绪)。我们在此不再详述。由于流控制的多样性,我个人认为,当硬件里用了流控制时,应做详细的说明,如何接线,如何应用。
3.软件流控制
由于电缆线的限制,我们在普通的控制通讯中一般不用硬件流控制,而用软件流控制。一般通过xon/xoff来实现软件流控制。常用方法是:当接收端的输入缓冲区内数据量超过设定的高位时,就向数据发送端发出xoff字符(十进制的19或control-s,设备编程说明书应该有详细阐述),发送端收到 xoff字符后就立即停止发送数据;当接收端的输入缓冲区内数据量低于设定的低位时,就向数据发送端发出xon字符(十进制的17或control- q),发送端收到xon字符后就立即开始发送数据。一般可以从设备配套源程序中找到发送的是什么字符。
串口通讯流控制
我们在串行通讯处理中,常常看到rts/cts和xon /xoff这两个选项,这就是两个流控制的选项,目前流控制主要应用于调制解调器的数据通讯中,但对普通rs232编程,了解一点这方面的知识是有好处的。那么,流控制在串行通讯中有何作用,在编制串行通讯程序怎样应用呢?这里我们就来谈谈这个问题。