第6章机械的平衡
孙恒《机械原理》(第八版)学习辅导书第6章 机械的平衡【圣才出品】

第6章 机械的平衡6.1 复习笔记本章主要介绍了刚性转子的静平衡和动平衡计算和平面机构的完全平衡和部分平衡的计算。
学习时需要重点掌握刚性转子的静平衡和动平衡计算(质径积的计算),常以计算题的形式考查,而且几乎每年必考。
除此之外,静(动)平衡条件、完全平衡、部分平衡等内容,常以选择题、填空题和判断题的形式考查,复习时需要把握其具体内容,重点记忆。
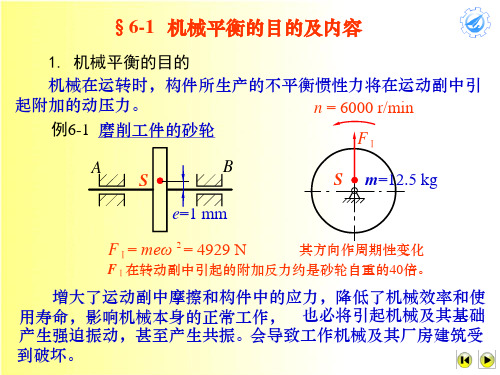
一、机械平衡的目的及内容1.机械平衡的目的(1)设法平衡构件的不平衡惯性力,以消除或减小其带来的不良影响;(2)对于利用不平衡惯性力产生的振动来工作的机械,则需研究如何合理利用不平衡惯性力。
2.机械平衡的内容(1)绕固定轴回转的构件的惯性力平衡(见表6-1-1)表6-1-1 绕固定轴回转的构件的惯性力平衡(2)机构的平衡作平面复合运动或往复移动的构件产生的惯性力无法在构件本身上找到平衡,必须研究整个机构使各运动构件惯性力的合力以及合力偶得到完全的或部分的平衡,以消除或降低最终传到机械基础上的不平衡惯性力,满足上述条件的平衡称为机械在机座上的平衡。
二、刚性转子的平衡计算(见表6-1-2)表6-1-2 刚性转子的平衡计算图6-1-1 刚性转子的平衡计算三、刚性转子的平衡实验1.静平衡实验(见表6-1-3)表6-1-3 静平衡实验2.动平衡实验试验一般需在动平衡机上进行,动平衡机的内容见表6-1-4。
表6-1-4 动平衡机3.现场平衡对于一些大型和高速转子,由于装运、蠕变、电磁场或工作温度等的影响会破坏制造期间的平衡。
若制造期间的平衡遭到破坏,可在现场直接测量机器中转子支架的振动,来确定不平衡量的大小及方位,进而进行平衡。
四、转子的许用不平衡量和许用不平衡度(见表6-1-5)表6-1-5 转子的许用不平衡量和许用不平衡度图6-1-2 许用不平衡量的分配五、平面机构的平衡。
《机械原理》课件机械的平衡
= 5.6kg
q bI = 6°
m bII
=
m
wW
II b
/ rbII
= 7.4kg
q bII = 145°
§63 刚性转子的平衡实验
一 静平衡实验
一 静平衡实验续
二 动平衡实验 动平衡机的工作原理示意图
§64 转子的许用不平衡量
转子要完全平衡是不可能的;实际上;也不需要过高要求 转子的平衡精度;而应以满足实际工作要求为度 为此;对不 同工作要求的转子规定了不同的许用不平衡量;即转子残余 不平衡量 许用不平衡量有两种表示方法: 1 用质径积mr单位g mm表示
2 用偏心距e 单位μm表示
e = mr/m
例:如图69所示;为一个一般机械的转子;质量为 70kg;转速n=3000r/min;两平衡基面Ⅰ Ⅱ至质心的距离 分别为a=40cm;b=60cm;试确定两平衡基面内的许用不平 衡量
解:因现在要平衡的是一个一般机械的转子;借助表61中典型转 子举例一栏的说明;可知应选用平衡等级G6 3;其平衡精度A=6 3mm/s 今转子角速度ω=πn/30≈0 1n=300rad/s;可求得许用偏心 距为
二 机械平衡的内容
1 绕固定轴回转的构件惯性力的平衡 1刚性转子的平衡 1静平衡:只要求惯性力达到平衡; 2动平衡:要求惯性力和惯性力矩都达到平衡 2挠性转子的平衡:转子在工作过程中会产生较大的弯曲 变形;从而使其惯性力显著增大 2 机构的平衡:对整个机构加以研究;设法使各运动构件 惯性力的合力和合力偶达到完全地或部分的平衡
2对于动不平衡的刚性转子;不论它有多少个偏心质量; 以及分布在多少个回转平面内;都只需在选定的两个平 衡基面内增加或除去一个适当的平衡质量;就可以使转 子获得动平衡双面平衡 3动平衡同时满足静平衡的条件经过动平衡的转子一 定静平衡;反之;经过静平衡的转子不一定动平衡
物理八年级下册第六章力和机械-探究杠杆的平衡条件(1)课件及答案

开瓶盖时杠杆的支点、动力和阻力,表示正确的是
(C
)
物理
八年级 下册 配粤教沪科版 第六章 6.5
3.完成下列各图(图6-5-10),画出动力臂L1和阻力臂L2.
如图所示: (1)
(3)
物理
八年级 下册 配粤教沪科版 第六章 6.5
(2)
(4)
(5)
物理
八年级 下册 配粤教沪科版 第六章 6.5
知道简单机械.探究并了解杠 力、动力臂、阻力、阻力臂
杆的平衡条件.
等概念.
2.会画力臂.
物理
八年级 下册 配粤教沪科版 第六章 6.5
1.把能绕某一固定点转动的硬棒(直棒或曲棒),叫做杠
杆.
(1)杠杆绕着转动的点叫做支点,如图6-5-1中的
点O
.
物理
八年级 下册 配粤教沪科版 第六章 6.5
(2)使杠杆转动的力是动力,如图中的 F1 . (3)阻碍杠杆转动的力是阻力,如图中的 F2 .
物理
八年级 下册 配粤教沪科版 第六章 6.5
1.如图6-5-6所示,OB是以O点为支点的杠杆,F是作用在
杠杆B端的力.已知OA⊥AB、AC⊥OB.图中F的力臂是
(A
)
A.OA B.AC
C.OC D.AB
物理
八年级 下册 配粤教沪科版 第六章 6.5
1.解析 由图可知,BA是力F的作用线,OA⊥AB, OA为支点到力F的作用线的距离,所以线段OA表示 力F的力臂. 答案:A.
物理
八年级 下册支点到力作用线的距离,
如图6-5-3中的OC. 2.使杠杆平衡的最小力的作图法:
图6-5-3
(1)在杠杆上找离支点最远的点作为力的作用点;
机械原理之机械的平衡

3
y
α3r m2A
2
y m2 r2 α2 r3 x m 3 F3
x
r3 r1 m3A
α2 m 1A
r1
m1
a
3
x
x
L
xA = m1A r1 cos α1 + m2 A r2 cos α 2 + m3A r3 cos α 3
= 41.67 × 100 cos 0o + 40 × 80 cos 90o + 11.67 ×120 cos 225o gmm = 3176.77gmm
r1 = r4 = 100mm, r2 = 200mm, r3 = 150mm ,
而各偏心重量的方位如图所示。 又设平衡重力 G 的重心至回转轴距离 试求平衡重力 G 的大小及方位。
r=150mm,
x
90 Q1 Q4 r4 r3 90 Q3 90 r1
机械的平衡问题 可分为以下三个方面 1)刚性转子的平衡
*刚性转子--刚性转子--无显著地弹性变形的刚性转动构件
平衡原理--力系的平衡原理
2)挠性转子的平衡 2)挠性转子的平衡
挠性转子----在惯性力的影响下产生弯曲变形的转子
3)机械在机座上的平衡 3)机械在机座上的平衡
平面运动的构件的惯性力由机座平衡。 机构的平衡称为机械在机座上的平衡。 械
α1=0°; α2=270°; α3=180°; α4=90°; G1r1=5000Nmm; G2r2=14000Nmm; G3r3=12000Nmm; G4r4=10000Nmm;
90 Q2 r2
n Gb rb cos α b = −∑ Gi ii cos α i i =1 n Gb rb sin α b = −∑ Gi ri sin α i i =1
第六章--机械的平衡习题与答案..(汇编)

第六章机械的平衡1 机械平衡分为哪几类?2何谓刚性转子与挠性转子?3 对于作往复移动或平面运动的构件,能否在构件本身将其惯性力平衡?4 机械的平衡包括哪两种方法?它们的目的各是什么?5 刚性转子的平衡设计包括哪两种设计?它们各需要满足的条件是什么?6 经过平衡设计后的刚性转子,在制造出来后是否还要进行平衡试验?为什么?7机械平衡的目的?8什么叫静平衡?9什么叫动平衡?10 动静平衡各需几个平衡基面?11刚性转子静平衡的力学条件是;动平衡的力学条件是。
12下图所示的两个转子,已知m1r1=m2r2,转子(a)是_____不平衡的;转子(b)是_____不平衡的。
13下图(a)、(b)、(c)中,s为总质心,图______中的转子具有静不平衡;图______中的转子具有动不平衡。
14平面机构的平衡问题,主要是讨论机构的惯性力和惯性力矩对的平衡。
15机构总惯性力在机架上平衡的条件是平面机构总质心。
16研究机械平衡的目的是部分或完全消除构件在运动时所产生的,减少或消除在机构各运动副中所引起的力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。
17对于绕固定轴回转的构件,可以采用的方法,使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。
若机构中存在作往复运动或平面复合运动的构件,应采用方法,方能使作用在机架上的总惯性力得到平衡。
18动平衡的刚性回转构件静平衡的。
19用假想的集中质量的惯性力及惯性力矩来代替原机构的惯性及惯性力矩,该方法称为。
20如图所示曲轴上,四个曲拐位于同一平面内,若质径积m1r1=m2r2=m3r3=m4r4,l1=l2=l3,试判断该曲轴是否符合动平衡条件?为什么?21图示一盘形回转体,其上有四个不平衡质量,它们的大小及质心到回转轴线的距离分别为:m 110=kg ,214kg m =,316kg m =,420kg m =,1200mm r =,r 2400=mm ,3300mm r =,4140mm r =,欲使该回转体满足静平衡条件,试求需加平衡质径积m r b b 的大小和方位。
西北工业大学机械原理课后答案第6章-1

第六章 机械的平衡题6-5 图示为一钢制圆盘,盘厚b=50mm ,位置Ⅰ处有一直径φ=50mm 的通孔,位置Ⅱ处是一质量m 2=0.5kg 的重块。
为了使圆盘平衡,你在圆盘上r=200mm 处制一通孔。
试求此孔德直径与位置。
(钢的密度γ=7.8g/cm 3)解:解法一:先确定圆盘的各偏心质量大小kg b m 7648.08.75454221-=⨯⨯⨯-=-=πγφπ kg m 5.02=设平衡孔质量γπb d m b 42-= 根据静平衡条件 02211=++b b r m r m r mmm kg r m r m r m b b b ⋅=︒-︒-=52.32210cos 135cos cos 2211θmm kg r m r m r m b b b ⋅=︒-︒-=08.104210sin 135sin sin 2211θmm kg r m r m r m b b b b b b b b ⋅=+=04.109)cos ()sin (22θθ由mm r b 200= kg m b 54.0=∴ mm b m d b2.424==γπ 在位置b θ相反方向挖一通孔︒=︒+︒=︒+⎪⎪⎭⎫⎝⎛=︒+-66.28218066.72180cos sin 1801b b b bb b b r m r m tg θθθ解法二:由质径积矢量方程式,取 mmmmkg W ⋅=2μ 作质径积矢量多边形如图6-5(b ) 平衡孔质量 kg r W m bbW b 54.0==μ 量得 ︒=6.72b θ题6-7在图示的转子中,已知各偏心质量m 1=10kg ,m 2=15kg ,m 3=20kg ,m 4=10kg ,它们的回转半径分别为r 1=40cm ,r 2=r 4=30cm ,r 3=20cm ,又知各偏心质量所在的回转平面的距离为l 12=l 23=l 34=30cm ,各偏心质量的方位角如图。
若置于平衡基面Ⅰ及Ⅱ中的平衡质量m b Ⅰ及m b Ⅱ的回转半径均为50cm ,试求m b Ⅰ及m b Ⅱ的大小和方位。
第6章 机械平衡(有答案)

§6 机械平衡填空题:1.回转构件的直径D和轴向宽度b之比/D b符合 <=5 条件或有重要作用的回转构件,必须满足动平衡条件方能平稳地运转。
如不平衡,必须至少在 2 个校正平面上各自适当地加上或去除平衡质量,方能获得平衡。
2.只使刚性转子的惯性力得到平衡称静平衡,此时只需在 1个平衡平面中增减平衡质量;使惯性力和惯性力偶矩同时达到平衡称动平衡,此时至少要在 2个个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。
3.刚性转子静平衡的力学条件是各偏心质量的惯性力的合力为零,而动平衡的力学条件是各偏心质量的惯性力的合力和惯性力偶矩均为零。
4.图a、b、c中,S为总质心,图 a、b 中的转子具有静不平衡,图 c 中的转子是动不平衡。
,转子a是静不平衡的,转子b是动不平衡的。
5.图示两个转子,已知mr mr1122a)b)选择题:1.设图示回转体的材料均匀,制造精确,安装正确,当它绕AA轴线回转时是处于 D 状态。
A)静不平衡B)静平衡C)完全不平衡D)动平衡2. 图示为一圆柱凸轮。
设该凸轮的材料均匀,制造精确,安装正确,则当它绕AA 轴线转动时,是处于 B 状态。
A)静不平衡B)静平衡 C)完全不平衡D)动平衡3. 图示一变直径带轮。
设该带轮的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 D 状态。
A)静不平衡B)静平衡 C)完全不平衡 D)动平衡判断题:1. 若刚性转子满足动平衡条件,这时我们可以说该转子也满足静平衡条件。
(√ )2. 不论刚性回转体上有多少个平衡质量,也不论它们如何分布,只需要在任意选定两个平面内,分别适当地加平衡质量即可达到动平衡。
(√ ) 综合题1:图示为绕O 点回转的薄片圆盘,在位置1、2处钻孔,101m .r =,202m .r =,孔部分材料质量分别为110kg .m =,205kg .m =。
为进行静平衡,欲在半径05m .b r =的圆周上钻一孔。
机械原理——机械的平衡
21
机械原理
§6-3 刚性转子的平衡试验 理论上的平衡转子,由于制造精度、装配、材质不均匀 等原因,会产生新的不平衡。只能借助于实验平衡。 平衡实验是用实验的方法来确定出转子的不平衡量的大 小和方位,利用增加或除去平衡质量的方法予以平衡。
一.静平衡实验
1.实验原理
22
机械原理
2.实验设备
滚轮式静平衡仪
9
机械原理
10
机械原理
例:如图,盘状转子偏心质量m1、m2, 回转半径r1、r2,如何实现静平衡?
解: F F F 0 Ii b
ω
2 2 2 m1 r 1 m r 22 r 2m b r b0 r b 0 b m 2m
26
机械原理
3.现场平衡
对于一些尺寸非常大或转速很高的转子,一般无法在专用动 平衡机上进行平衡。即使可以平衡,但由于装运、蠕变和工作温 度过高或电磁场的影响等原因,仍会发生微小变形而造成不平衡。 在这种情况下,一般可进行现场平衡。 现场平衡 就是通过直接测量机器中转子支架的振动,来确 定其不平衡量的大小及方位,进而确定应增加或减去的平衡质量 的大小及方位,使转子得以平衡。
G4000
G1600
G630
1600
630
……
G2.5 G1 G0.4
……
2.5 1 0.4
……………………………..
燃气轮机和汽轮机、透平压缩机、机床传动装置、 特殊中、大型电机转子、小型电机转子等。 磁带录音机传动装置、磨床传动装置、特殊要求 的小型电机转子。 精密磨床的主轴、砂轮盘及电机转子陀螺仪。
32
机械原理
1.利用配重 2
1 4
s
机械原理 第六章 机械的平衡

二. 刚性转子的动平衡计算(Dynamic balance)
1. 动不平衡
——在转子运动的情况下才能显示出来的不平衡现象。
对于 b/D>0.2 的转子,其质量不能
再视为分布在同一平面内,即使质 心在回转轴线上,由于各惯性力不 在同一回转平面内,所形成惯性力 偶仍使转子处于不平衡状态。
m1 m2
工程中符合这种条件的构件有:多缸平衡 加装平衡配重,可以平衡 由 m B 所产生的离心惯性力和滑 块的一部分往复移动惯性力。
总
结
基本要求:掌握刚性转子的静平衡、动平衡的原理和方法;了 解平面四杆机构的平衡原理。 重 难 点:掌握刚性转子的静平衡、动平衡的原理和方法。 点:刚性转子动平衡概念的建立。
分别按每个平衡基面建立质径积的平衡方程式,用图解法求 解出两平衡基面的平衡质量的大小及方位。
II
F2
F2II
m2 r2
I
F1II
r3 m3 F3
F2I
r1
F1I
F3II l3 l2
m1
F1
F3I l1 L
m3 I r3 I mbI rbI
m3 II r3 II
m2 I r2 I m1 I r1 I
2)利用平衡质量平衡 S’1 m1 图示机构中,构件2的质量m2可以 A 1 用两个集中在B和C两点的两个质 量替换:
m'
添加平衡质量m’、m”之 后,使机构的质量中心落在AD 连线上固定点S处。使机构达到 平衡。
2. 部分平衡 1)利用非对称机构平衡 利用两组非对称机构,运动 过程所产生的惯性力方向相反, 互相抵消一部分。
静平衡条件
me = mbrb + m1r1 + m2r2= 0
机械原理 机械的平衡

全部或部分地消除惯性力的不良影响(利用惯性力工作的机械除外)。
机械原理
第6章 机械的平衡
二、机械平衡的内容
因 F mac ,由于各构件的结构(m分布)不同,运动形式(ac)不同, 其产生的惯性力也不同,平衡方法也不同。
平面机构中各构件的运动形式:转动、移动、平面运动。
1。绕固定轴回转的构件惯性力的平衡 若构件等速回转且构件的质量分布均匀(无惯性力)
为平衡这两个惯性力,可在转子上加一配重, 质与量F1、为Fm2b平,衡使,它即产:生F的b 离 m心b惯2r性b 力
如何确定mbrb的大小和方位? 建立直角坐标系,根据力的平衡条件,由:
Fx 0及 Fy 0
算出mbrb后,再根据转子结构选定rb后, 即可得出平衡质量mb。 (也可以在反方向除去以平衡质量)
动平衡的条件:
转子在运转时各偏心质量引起的惯性力 的矢量和为零及这些惯性力所构成的力矩矢 量和也为零。
动平衡方法:
将各偏心质量分解到预先选定的两个平 衡基面上,在两个平衡基面上加(减)平衡 质量,使各偏心质量引起的惯性力合力为零, 这个转子就可得到动平衡。
机械原理 动平衡的计算方法
第6章 机械的平衡
机械原理
第6章 机械的平衡
动平衡的计算方法
根据平行力的分解原理:一个力可分解为
与其平行的两个分力.
两个分力的大小:
F
Fl1 L
F
F(L L
l1 )
选两取 个两 平个 衡平 基衡面内基进面行Ⅰ平、衡Ⅱ计,算将(F相1、当F于2、静F平3分衡解计到算两)个平衡基面上, 在
分别求出在两个 平衡基面Ⅰ、Ⅱ 的平衡质量 mb1 、 mb2
i为ri与x轴夹角(逆时针为正)
机械的平衡
第五章机械的平衡内容提要本章主要解决机械的动平衡和静平衡问题,学会用平衡基面法消除机械系统的动平衡。
本章主要内容是:1.掌握机械平衡的一些基本概念,如静平衡、动平衡等;2.掌握转子进行静平衡的条件、方法和步骤,并可根据实际转子进行静平衡实验,确定转子的静不平衡量的大小和位置;3.掌握转子进行动平衡的条件、方法和步骤,并可根据实际转子进行动平衡实验,确定转子的动不平衡量的大小和位置;4.掌握平面机构的平衡方法;5.了解空间机构的平衡方法;本章重点是刚性转子的静平衡、动平衡的原理及计算方法。
本章难点是转子动平衡和平面机构平衡的原理和计算方法。
要点分析机械在运转时,构件所产生的惯性力和惯性力矩在运动副上引起了大小和方向不断变化的动压力,这种动压力不仅会降低机械效率,影响机械的使用寿命,而且引起机械及其基础产生强迫振动以及可能产生的其它不良现象。
机械平衡的目的就是尽可能消除或减少惯性力对机械系统的不良影响,借助于增减校正质量或者改变机械系统的质量分布将不平衡惯性力和惯性力矩加以消除或减少。
尤其是对于高速运转的机械,如果惯性力引起的振动频率等于机械的固有频率时,将导致共振现象,这将对机械造成破坏,对操作者带来不安全因素。
由于构件的运动形式不同,所产生的惯性力的平衡方法也不同。
对于绕固定轴转动的回转构件(即转子),可以就其本身加以平衡;对于作往复移动或平面运动的构件,必须就整个机构进行平衡。
所以,机械的平衡问题分为转子的平衡和机构的平衡两类。
根据转子的工作状态和力学特性,从平衡的观点出发,常把转子分成两类:刚性转子和挠性转子。
一般来说,凡是工作转速远低于转子的一阶弯曲临界转速的转子视为刚性转子;而把工作转速接近或超过转子的一阶弯曲临界转速的转子视为挠性转子。
在国际标准化组织制定的"平衡词汇"标准ISO1925-1981和我国"试验机名词术语"ZBY033-82中,刚性转子被更确切地定义为"可以在一个或任意选定的两个校正平面上,以低于转子工作转速的任意转速进行平衡校正,且校正之后,在最高工作转速及低于工作转速的任意转速和接近实际的工作条件下,其不平衡量均不明显地超过所规定的平衡要求"的转子。
机械原理第六章机械的平衡
(3)实验特点
结构简单、操作方便。能满足一定精度要求,但工作效率低。
对于批量转子静平衡,可采用一种快速测定平衡的单面平衡机。
2.动平衡实验
转子的动平衡实验一般需在专用的动平衡机上进行。 (1)实验设备 动平衡实验机主要由驱动系统、支承系统、测量指示系统等 部分组成。
例6-6 光电式动平衡机
(2)实验原理
刚性转子的平衡计算(2/4)
静平衡 对于 静不平衡转子,利用在其上增加或除去一部分 质量,使其质心与回转轴心重合,即可使转子的惯性力得以平衡 的方法。
静平衡的条件 平衡后转子的各偏心质量(包括平衡质量) 的惯性力的合力为零。 即
ΣF=0
(3)静平衡计算
静平衡计算主要是针对由于结构所引起的静不平衡的转子而 进行平衡的计算。
通常,对机构只进行总惯性力的平衡,所以欲使机构总惯性 力为零,应使机构的质心加速度为零,即应使机构的质心静止不 动。
1.完全平衡
平面机构的平衡(2/3)
机构的完全平衡是指机构的总惯性力恒为零。为了达到机构 的完全平衡的目的,可采用如下措施:
(1)利用对称机构平衡
(2)利用平衡质量平衡
例6-8 铰链四杆机构的完全平衡 例6-9 曲柄滑块机构的完全平衡
式中ω为转子的角速度(rad/s)。
对于静不平衡的转子,许用不平衡量[e]在选定A值后可由上 式求得。
对于动不平衡转子,先由表中定出[e],再求得许用不平衡质 径积[mr]=m[e],然后将其分配到两个平衡基面上。
转子的许用不平衡量(2/3)
如下图所示,两平衡基面的许用不平衡质径积可按下式求得
[mr]Ⅰ=[mr]b/(a+b) [mr]Ⅱ=[mr]a/(a+b)
机械原理 第6章 机械的平衡

§6-3 刚性转子的平衡实验
试验原因及目的:
平衡设计:理论上是完全平衡的。还会出现不平衡现象。 需要用试验的方法对其做进一步平衡。
1. 静平衡试验
导轨式静平衡架: 1) 应将两导轨调整为水平且互相平行; 2) 将转子放在导轨上,让其轻轻地自由滚动;
r3 m3
mb
或:
质径积
G1 r1 + G2 r2 + G3 r3 + Gb rb=0 重径积 F3
Fb
求解方法:
A.矢量图解法
选取比例尺:W =
其中:Wi = miri
miri li
(kgm/mm)
W3 Wb
W2 W1
B.坐标轴投影法
(m1r1)x+ (m2r2)x+ (m3r3)x+ (mbrb)x= 0 (m1r1)y+ (m2r2)y+ (m3r3)y+ (mbrb)y= 0 可求得(mbrb)x 和(mbrb)y 。
----单面平衡。
例1':图示均质转盘开有两个圆孔,直径分别为 d1=100mm,d2=150mm,方位如图,其中r1=180mm, r2=160mm,转盘直径D=780mm,厚度t=40mm,想在此 转盘上回转半径r=300mm的圆周上再制一圆孔使其平衡, 求该圆孔的直径和位置。
F m
2m
m
-F
第6章 机械的平衡
§6-1 §6-2 §6-4 §6-5 §6-6
机械平衡的目的及内容 刚性转子的平衡计算 刚性转子的平衡实验 转子的许用不平衡量 平面机构的平衡
§6-1 机械平衡的目的及内容
孙桓《机械原理》笔记和课后习题(含考研真题)详解(机械的平衡)【圣才出品】
第6章机械的平衡6.1 复习笔记一、机械平衡的目的及内容1.机械平衡的目的(1)设法将构件的不平衡惯性力加以平衡以消除或减小其不良影响;(2)对于利用不平衡惯性力产生的振动来工作的机械,则需考虑如何合理利用不平衡惯性力的问题。
2.机械平衡的内容(1)绕固定轴回转的构件的惯性力平衡绕固定轴回转的构件统称为转子,分为刚性转子和挠性转子。
①刚性转子的平衡a.刚性转子的定义在工作过程中产生的弹性形变甚小的转子称为刚性转子。
b.特点第一,刚性较好,共振转速较高;第二,工作转速低于(0.6~0.75)n c1(n c1为转子的第一阶临界转速)。
c.平衡理论刚性转子的平衡按理论力学中的力系平衡来进行。
d.转子的静平衡和动平衡第一,转子的静平衡只要求其惯性力平衡,称为转子的静平衡;第二,转子的动平衡同时要求其惯性力和惯性力矩平衡,称为转子的动平衡。
②挠性转子的平衡a.挠性转子的定义在工作过程中产生较大的弯曲变形,使其惯性力显著增大的转子称为挠性转子。
b.特点第一,质量和跨度很大;第二,径向尺寸较小,共振转速较低;第三,工作转速n很高(n≥(0.6~0.75)n c1)。
c.平衡理论挠性转子的平衡原理是基于弹性梁的横向振动理论。
(2)机构的平衡作往复移动或平面复合运动的构件,其所产生的惯性力无法在该构件本身上平衡,必须研究整个机构使各运动构件惯性力的合力和合力偶得到完全或部分平衡,以消除或降低最终传到机械基础上的不平衡惯性力,满足上述条件的平衡称为机械在机座上的平衡。
二、刚性转子的平衡计算1.刚性转子的静平衡计算(1)静不平衡①定义 由于质心不在回转轴心上而使转子在静态时表现出来的不平衡现象称为静不平衡。
②特点a .对象为转子轴向宽度b 与其直径D 之比b/D <0.2的转子;b .转子的质心不在回转轴线上,当其转动时,偏心质量就会产生离心惯性力。
(2)静平衡的计算如图6-1-1所示为一盘状转子,已知其具有偏心质量m 1、m 2,各自的回转半径为r 1、r 2,转子角速度为ω。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
作者:潘存云教授
L F1
适用对象: 轴向尺寸较大(B/D≥ (B/D≥0 的转子, 适用对象 : 轴向尺寸较大 (B/D≥0.2) 的转子 , 如内燃 机中的曲轴和凸轮轴、 电机转子、 机中的曲轴和凸轮轴 、 电机转子 、 机床主轴等都必须 按动平衡来处理。 按动平衡来处理。 m
3
m1
m2
图6 -2
F3 m3 ω
r2 r1 r3
偏心
m1 F1
设各偏心质量分别为m 偏心距为r 转子以ω等速 设各偏心质量分别为 i , 偏心距为 i , 转子以 等速 回转, 产生的离心惯性力为: 回转, 产生的离心惯性力为: Fi = miω2ri => ∑Fi= ∑ miω2ri
平衡配重所产生的离心惯性力为: 平衡配重所产生的离心惯性力为: F 2 Fb=mbω2rb 总离心惯性力的合力为: 总离心惯性力的合力为:
作者:潘存云教授
ω
作者:潘存云教授
静止 运动
2. 机构的平衡 对平面连杆机构,由于作往复运动和平面运动的 对平面连杆机构, 构件总是存在加速度, 就单个构件而言, 构件总是存在加速度 , 就单个构件而言 , 是无法平衡 但可以将整个机构一并考虑, 的 。 但可以将整个机构一并考虑 , 采取措施对总的惯 性力或惯性力矩进行平衡。 性力或惯性力矩进行平衡。 本章重点介绍刚性转子的平衡问题。 本章重点介绍刚性转子的平衡问题。 刚性转子的平衡问题 结构不对称 材料 缺陷 制造 误差 质量分布 不均匀
注:可分别在平面I, II内,用上述解析法求解该方程
空间力系的平衡 也即: 也即: 动平衡
两个平面汇交力系的平衡问题。 两个平面汇交力系的平衡问题。 两个静平衡问题。 两个静平衡问题。
结论: 结论: 对于动不平衡的转子 , 无论其具有多少个偏心质 对于 动不平衡的转子 动不平衡 的转子, 量以及分布在多少个回转平面内, 量以及分布在多少个回转平面内 , 都只要在两个选定 的平衡基面内加上或去掉平衡质量, 的平衡基面内加上或去掉平衡质量 , 即可获得完全平 双面平衡。 衡。故动平衡又称为双面平衡。 故动平衡又称为双面平衡
理由:此类转子由于质量分布不在同一个平面内, 理由:此类转子由于质量分布不在同一个平面内,离 心惯性力将形成一个不汇交空间力系, 不汇交空间力系 心惯性力将形成一个不汇交空间力系,故不能按静平 衡处理。 衡处理。 任意空间力系的平衡条件为: 任意空间力系的平衡条件为: ∑Fi = 0, ∑Mi=0
动平衡的计算方法: 动平衡的计算方法:
I
m3 F3 l1 l2
l3
不平衡质量 分解结果: 分解结果:
m1I l1 = m1 L L − l1 = m1 L
L
m2I
m 2 II
m1 II
l2 = m2 L L − l2 = m2 L
m3I m 3 II
l3 = m3 L L − l3 = m3 L
I F2I m2I m1I m3I rbI mbI FbI F1I r1
F1 I l1 = F1 L L − l1 = F1 L
F2 I
F2 II
F1 II
l2 = F2 L L − l2 = F2 L
F3 I F3 II
l3 = F3 L L − l3 = F3 L
II F2 m2 r2 m2I m1I m3I r1 m1 F 1
作者:潘存云教授 3
m2II m1II r m3II
I F2I F1I
将三个不同回转 面内的离心惯性 力往平面Ⅰ和Ⅱ 上分解。
首先在转子上选定两个回转平面Ⅰ和Ⅱ作为平 衡基面,该平面用来加装或去掉平衡质量。
II F2II F1II F3II l3
F2 m2
作者:潘存云教授 2
r
r1 m1 F 1
ቤተ መጻሕፍቲ ባይዱ
r3
m3 F3 l1 L l2
F3I
L l1 直接引用理论力学 结论( 结论(即一个力可 以分解成两个与其 平行的两个分力 的两个分力) 平行的两个分力) 有:
F2 m2 r2 m1 F 1
作者:潘存云教授 3
II F2II m2II m rbII bII r m1II m3II F1II F3II l3 l2 l1 L
FbII
m3 F3
F3I
mbIrbI + m1Ir1 + m2Ir2+ m3Ir3 = 0 mbIIrbII + m1IIr1 + m2IIr2+ m3IIr3 = 0
本章重点: 本章重点:
①掌握静平衡和动平衡的计算方法。 掌握静平衡和动平衡的计算方法。 ②熟悉静平衡和动平衡的实验方法。 熟悉静平衡和动平衡的实验方法。
作业(P152): 作业(P152): (P152) 6-4,6-6 4,6-
§6-3 刚性转子的平衡实验 -
一、静平衡实验 导轨式平衡架 导轨式平衡架 特点:结构简单、精度高,但两刀口平行、调整困难, 特点:结构简单、精度高,但两刀口平行、调整困难, 且要求两轴端直径相同。 且要求两轴端直径相同。一般要经过多次实验才能找 工作效率低,不适合批量生产。 准,工作效率低,不适合批量生产
Fb m2 r2 rb 作者:潘存云教授 r1 r3 m 3 m1 F1 ω F3
F = Fb +∑Fi = 0
mω2e = mbω2rb + m1ω2r1 + m2ω2r2+ m3ω2r3 =0
约掉公因式
me = mbrb + m1r1 + m2r2+ m3r3 = 0 称miri为质径积
可用解析法求解此矢量方程。即建立直角坐标系, 可用解析法求解此矢量方程。即建立直角坐标系, 将上述矢量方程在坐标轴上投影, 将上述矢量方程在坐标轴上投影 , 得到两个标量方 程,然后解此方程组即可得到mbrb 的大小和方位。 的大小和方位。 具体方法和公式参见教材P133~134) (具体方法和公式参见教材P133~134)
平衡计算方法: 平衡计算方法: 同一平面内各重物所产生的离心惯性力构成一个平 面汇交力系: 面汇交力系: Fi 如果该力系不平衡,那么合力: 如果该力系不平衡,那么合力: ∑Fi≠0 增加一个重物 Gb 后,可使新 的力系之合力: 的力系之合力: F = F b+∑F i = 0
F2 m2 Fb
作者:潘存云教授
FI =
F II
l1 F L L − l1 = F L
作者:潘存云教授
rI=r=rII
FII
FI F
动平衡的计算方法: 动平衡的计算方法:
I F2I F1I F3I l1 L r1 m1 F 1 F2 m2 r2
作者:潘存云教授 3
II F2II F1II F3II l3 l2
r
m3 F3
离心惯性力 分解结果: 分解结果:
作者:潘存云教授
离心力F力的大小方向始终都在变化, 离心力 力的大小方向始终都在变化,将对运动副产 力的大小方向始终都在变化 生动压力。 生动压力。 附加动压力会产生一系列不良后果: 附加动压力会产生一系列不良后果: ①增加运动副的摩擦,降低机械的使用寿命。 增加运动副的摩擦,降低机械的使用寿命。 ②产生有害的振动,使机械的工作性能恶化。 产生有害的振动,使机械的工作性能恶化。 降低机械效率。 ③降低机械效率。 平衡的目的:研究惯性力分布及其变化规律 , 并采 平衡的目的 : 研究惯性力分布及其变化规律, 取相应的措施对惯性力进行平衡, 取相应的措施对惯性力进行平衡 , 从而减小或消除 所产生的附加动压力、减轻振动、 所产生的附加动压力 、 减轻振动 、 改善机械的工作 性能和提高使用寿命。 性能和提高使用寿命。 本章重点介绍刚性转子的平衡问题。 本章重点介绍刚性转子的平衡问题。
所谓刚性转子的不平衡,是指由于结构不对称、材料缺陷以及制造误差等原因而使质量分布不均匀,致使中心惯性主轴与回 转轴线不重合,而产生离心惯性力系的不平衡。根据平衡条件的不同,又可分为静平衡和动平衡两种情况。
二、平衡的内容 1.回转件的平衡 回转件的平衡 a)刚性转子的平衡 刚性转子的平衡
根据构件运动特点形式的不同,平衡问题可归纳为如下两个方面:
结论:(P134) 结论:(P134) 134 对于静不平衡的转子 对于 静不平衡的转子, 无论其具有多少个偏心质 静不平衡 的转子, 量 , 都只需要在同一个平衡面内加上或去掉一个平衡 质量即可获得平衡。故静平衡又称为单面平衡。 质量即可获得平衡。故静平衡又称为单面平衡。 单面平衡
2.刚性转子的动平衡计算 刚性转子的动平衡计算 动平衡 即质量分布不在同一回转面内) (即质量分布不在同一回转面内) 图示凸轮轴的偏心质量不在 ω 同一回转平面内, 同一回转平面内 , 但质心在回转 轴上, 在任意静止位置, 轴上 , 在任意静止位置 , 都处于 平衡状态。 平衡状态。 运动时有: 运动时有:F1+F2 = 0 0 惯性力偶矩: 惯性力偶矩: M=F1L=F1L≠0 这种在静止状态下处于平衡, 这种在静止状态下处于平衡,而运动状态下呈现不平 称为动不平衡。对此类转子的平衡,称为动平衡 动平衡。 衡,称为动不平衡。对此类转子的平衡,称为动平衡。
§6-3 刚性转子的平衡实验 -
经过计算,在理论上是平衡的转子,由于制造误 经过计算,在理论上是平衡的转子,由于制造误 材质不均匀、安装误差等因素 等因素, 差、材质不均匀、安装误差等因素,使实际转子存在 不平衡量。要彻底消除不平衡, 不平衡量。要彻底消除不平衡,只有通过实验方法测 出其不平衡质量的大小和方向。 出其不平衡质量的大小和方向。然后通过增加或除去 平衡质量的方法予以平衡。 平衡质量的方法予以平衡。 平衡实验方法: 平衡实验方法: 方法 1)静平衡实验 1)静平衡实验 2)动平衡实验 2)动平衡实验 3)现场平衡 3)现场平衡
工 作 转 速 n<(0.6~0.75)ne1 转 子 一阶自振频率。 一阶自振频率。可忽略运动时 的轴线变形。 的轴线变形。平衡时可采用理 论力学力系平衡的原理。 论力学力系平衡的原理。 b)挠性转子的平衡 挠性转子的平衡 当转子工作转速n≥ 当转子工作转速 ≥(0.6~0.75)ne1, 且重量和跨度较大, 且重量和跨度较大,运转时会产 生较大的变形,使离心惯性力大 生较大的变形, 大增加。此类问题复杂, 大增加。此类问题复杂,有专门 的学科论述。 的学科论述。