ZigBee学习Z-stack外部中断
【无线通信篇Zstack协议栈】CC2530ZigbeeZstack协议栈组网项目及详细讲解篇

【⽆线通信篇Zstack协议栈】CC2530ZigbeeZstack协议栈组⽹项⽬及详细讲解篇物联⽹⽆线通信技术,ZigBee⽆线传感⽹络CC2530最⼤的特点就是⼀个拥有⽆线收发器(RF)的单⽚机,既能实现单⽚机功能,也能实现⽆线传输Zstack协议栈是ZigBee协议栈⾥的翘楚,是ZigBee组⽹的⾸选协议栈项⽬实现功能:l 总共有三个端点,⼀个协调器和两个终端节点l 终端节点1连接DHT11温湿度传感器,定时上传给协调器l 终端节点2连接LED,可以通过协调器按键控制,定时上报LED开关状态l 协调器连接12864 OLED 屏幕,实时显⽰温湿度和LED状态l 协调器可以通过按键控制终端2的LED开关,控制后将会显⽰控制结果扩展功能(当前未实现,可进⼀步开发实现):l 连接协调器串⼝,将终端节点采集的数据通过串⼝发送,PC写上位机实现数据展⽰l 连接WIFI或者4G模块,WIFI模块如ESP8266,实现数据局域⽹⽆线传输或者上传到OneNET、机智云、阿⾥云、⾃⼰开发云服务器等,实现WEB或⼿机APP显⽰和控制。
⼀、项⽬测试(可想⽽知,⼴州的天⽓有多热,39℃了都)实现功能汇总:l 总共有三个端点,⼀个协调器和两个终端节点l 终端节点1连接DHT11温湿度传感器,定时上传给协调器l 终端节点2连接LED,可以通过协调器按键控制,定时上报LED开关状态l 协调器连接12864 OLED 屏幕,实时显⽰温湿度和LED状态l 协调器可以通过按键控制终端2的LED开关,控制后将会显⽰控制结果(⼀) 环境汇总芯⽚:CC2530F256Zstack协议栈:ZStack-CC2530-2.5.1a编程环境:IAR(⼆) 引脚分配协调器:128*64 OLED 0.96⼨屏幕供电:3.3V通信协议:IIC引脚:SDA P0_6SCL P0_7按键:IO:P0_1下降沿触发中断终端1:DHT11:通信⽅式:单总线协议供电:3.3VIO:P0_6终端2:LEDIO:P1_0说明:⾼电平点亮,低电平熄灭⼆、基础认识(⼀) CC2530单⽚机CC2530最⼤的特点就是⼀个拥有⽆线收发器(RF)的单⽚机,既能实现单⽚机功能,也能实现⽆线传输。
Z-stack学习笔记
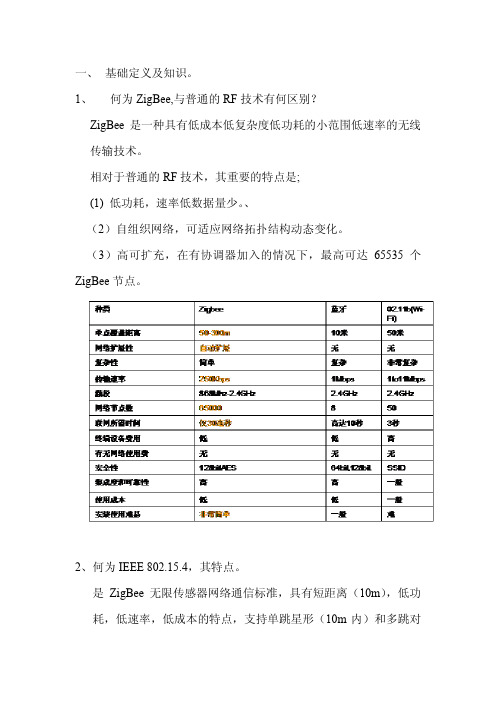
2、何为 IEEE 802.15.4,其特点。 是 ZigBee 无限传感器网络通信标准,具有短距离(10m) ,低功 耗,低速率,低成本的特点,支持单跳星形(10m 内)和多跳对
等(>10m)两种网络拓扑。
3、何为 Z-Stack? Z-Stack 是 TI 公司开发的 ZigBee 协议栈,并且经过了 ZigBee 联 盟的认可而为全球众多开发商所广泛采用。 Z-Stack 实际上是帮助 程序员方便开发 ZigBee 的一套系统, 它采用轮转查询式操作系统, 包括两个主要流程(如图) :系统初始化和执行操作系统。系统初 始化完成后,就进入执行操作系统,并且在其中是一个死循环。 执行操作系统中主函数即为轮询式操作系统的主体部分,也是我 们需要重点开发、 调用、 掌握的部分。 欲知其详, 且听下文分解。
Check for keys */表示检查按键情况。
这个程序到最后,调用了一个重要的函数指针 pHalKeyProcessFunction
这个指针是指向 void OnBoard_KeyCallback ( uint8 keys, uint8 state ) 在“ZMain\OnBoard .c”文件中可以找到。
其中 0 号 endpoint 是用"ZDO"预留的,不能占用。 4. Cluster ID,这个怎么叫呢?叫信息簇 ID 吧。我的理解是,“这是个哪类的信息”,发送 端和接收端一定要对应,但是具体这个“类”怎么分,是我们可以自己决定的。比如说这个例 子,我可以这样定:Cluster ID=1 代表开关一次,Cluster ID=2 代表连续闪烁。或者定 义 Cluster ID=1 代表点对点控制,而 Cluster ID=2 代表全部控制,等等。
二、开发 Z-Stack 须知。 1、ZigBee 的体系,数据及管理的方式和方向。ZigBee 网络构架。
ZigBee的Z-Stack操作系统
Z-Stack操作系统学习ZigBee有两个月了,学习期间也走了不少弯路,刚开始调试了几个LED小灯的实验,串口通信实验,点对点通信实验,以为这样基本就差不多可以做定位系统了,于是直接跳到定位这一块,实际上远没有那么简单。
我想很多初学者都是打开协议栈就被左边那一列给镇住了,看到那么多代码都不知道从何入手,下面我重点介绍一下关于ZigBee协议栈操作系统的原理,让更多初学者能看清Z-Stack操作系统(其实只是一个简单的小系统,看明白了觉得也没有多复杂)的工作过程。
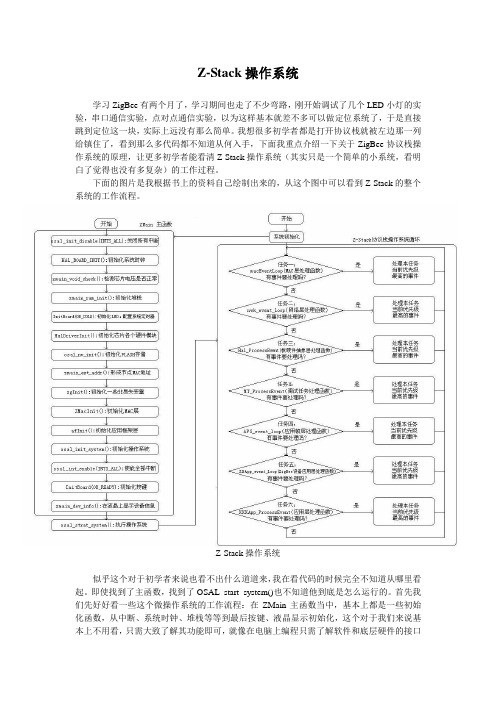
下面的图片是我根据书上的资料自己绘制出来的,从这个图中可以看到Z-Stack的整个系统的工作流程。
Z-Stack操作系统似乎这个对于初学者来说也看不出什么道道来,我在看代码的时候完全不知道从哪里看起。
即使找到了主函数,找到了OSAL_start_system()也不知道他到底是怎么运行的。
首先我们先好好看一些这个微操作系统的工作流程:在ZMain主函数当中,基本上都是一些初始化函数,从中断、系统时钟、堆栈等等到最后按键、液晶显示初始化,这个对于我们来说基本上不用看,只需大致了解其功能即可,就像在电脑上编程只需了解软件和底层硬件的接口一样。
在初始化函数执行完以后便进入了osal_start_system()函数,开始OSAL操作系统。
OSAL操作系统里面有七个任务,该循环轮询查询每个任务是否有需要处理的事件,如果有则处理,没有则跳到下一个任务,这七个任务有不同的优先级,从图中可以看出MAC层拥有最高的优先级,MAC层如果有任务,则下面的任务不会被处理。
好了,基本上对于该操作系统有了一个简单的了解以后,我们再来结合代码看看代码到底是怎么运行的。
先大致浏览一下协议栈的目录,可以看到有ZMain文件夹(如下乳所示),这个应该就是主函数,看了很多资料确定了确实是从这里开始运行的。
打开ZMain.c,找到ZSEG int main( void )函数,函数内容如下:ZSEG int main( void ){// Turn off interruptsosal_int_disable( INTS_ALL );// Initialize HALHAL_BOARD_INIT();// Make sure supply voltage is high enough to runzmain_vdd_check();// Initialize stack memoryzmain_ram_init();// Initialize board I/OInitBoard( OB_COLD );// Initialze HAL driversHalDriverInit();// Initialize NV Systemosal_nv_init( NULL );// Determine the extended addresszmain_ext_addr();// Initialize basic NV itemszgInit();// Initialize the MACZMacInit();#ifndef NONWK// Since the AF isn't a task, call it's initialization routineafInit();#endif#ifdef LCD_SUPPORTEDHalLcdInit();#endif// Initialize the operating systemosal_init_system();// Allow interruptsosal_int_enable( INTS_ALL );// Final board initializationInitBoard( OB_READY );//HalLcdInit();// Display information about this devicezmain_dev_info();/* Display the device info on the LCD */#ifdef LCD_SUPPORTEDzmain_lcd_init();#endifosal_start_system(); // No Return from here} // main()————来自百度文库,转载请注明出去大致看一下,和上述图中的初始化基本上一样。
ZIGBEE学习笔记
1、ZigBee协议栈:ZigBee协议是一系列的通信标准,通信双方需要共同按照这一标准进行正常的数据发射和接收。
协议栈是协议的具体实现形式,通俗点来理解就是协议栈是协议和用户之间的一个接口,开发人员通过使用协议栈来遵循和使用这个协议的,进而实现无线数据收发。
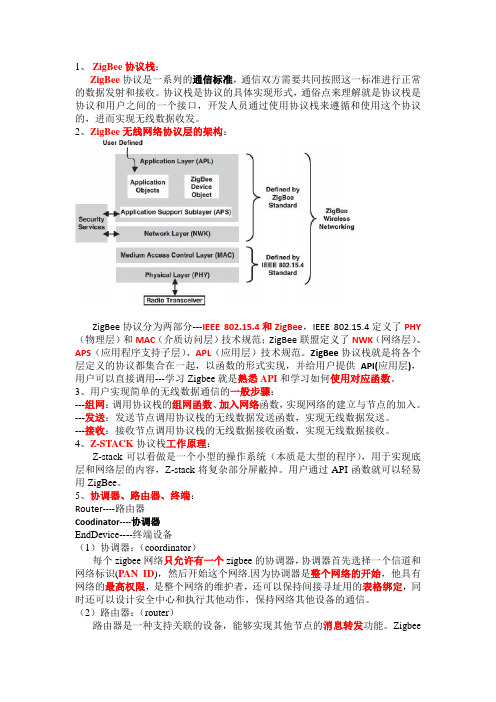
2、ZigBee无线网络协议层的架构:ZigBee协议分为两部分---IEEE 802.15.4和ZigBee,IEEE 802.15.4定义了PHY (物理层)和MAC(介质访问层)技术规范;ZigBee联盟定义了NWK(网络层)、APS(应用程序支持子层)、APL(应用层)技术规范。
ZigBee协议栈就是将各个层定义的协议都集合在一起,以函数的形式实现,并给用户提供API(应用层),用户可以直接调用---学习Zigbee就是熟悉API和学习如何使用对应函数。
3、用户实现简单的无线数据通信的一般步骤:---组网:调用协议栈的组网函数、加入网络函数,实现网络的建立与节点的加入。
---发送:发送节点调用协议栈的无线数据发送函数,实现无线数据发送。
---接收:接收节点调用协议栈的无线数据接收函数,实现无线数据接收。
4、Z-STACK协议栈工作原理:Z-stack可以看做是一个小型的操作系统(本质是大型的程序),用于实现底层和网络层的内容,Z-stack将复杂部分屏蔽掉。
用户通过API函数就可以轻易用ZigBee。
5、协调器、路由器、终端:Router----路由器Coodinator----协调器EndDevice----终端设备(1)协调器:(coordinator)每个zigbee网络只允许有一个zigbee的协调器,协调器首先选择一个信道和网络标识(PAN ID),然后开始这个网络.因为协调器是整个网络的开始,他具有网络的最高权限,是整个网络的维护者,还可以保持间接寻址用的表格绑定,同时还可以设计安全中心和执行其他动作,保持网络其他设备的通信。
转:ZigBeeZ-StackCC2530实现低功耗运行的配置简介

转:ZigBeeZ-StackCC2530实现低功耗运⾏的配置简介设备⽀持低功耗运⾏是ZigBee⽹络的⼀⼤特点,该特性借助CC2530芯⽚能够很好地体现出来。
CC2530芯⽚有五种运⾏模式,分别为主动模式、空闲模式、PM1、PM2和PM3。
主动模式是⼀般运⾏模式;空闲模式除了CPU内核停⽌运⾏外,其他和主动模式⼀样;PM1、PM2、PM3是低功耗运⾏模式,CC2530通过关闭不必要的部分和调整系统时钟来达到低功耗的效果。
PM1:稳压器的数字部分开启,32 MHzXOSC和 16 MHz RCOSC都不运⾏。
32 kHz RCOSC或32 kHz XOSC运⾏。
复位、外部中断或睡眠定时器溢出时系统将转到主动模式。
PM2:稳压器的数字内核关闭。
32 MHzXOSC和 16 MHz RCOSC都不运⾏。
32kHz RCOSC或32 kHz XOSC运⾏。
复位、外部中断或睡眠定时器过期时系统将转到主动模式。
PM3:稳压器的数字内核关闭。
所有的振荡器都不运⾏。
复位或外部中断时系统将转到主动模式。
⼏种运⾏模式的对⽐如下表所⽰:PM2模式⼜叫LITE SLEEP模式,其功耗在毫安级别,多⽤于需要定时唤醒的场合,⽐如周期性地唤醒传感器来进⾏数据的采集。
PM3模式⼜叫做DEEP SLEEP模式,在⼏种运⾏模式中功耗最低,在微安级别,多⽤于远程遥控场合,⽐如使⽤CC2530做⼀个远程遥控器,在没有按键按下时,可使其进⼊PM3模式以减少电能消耗。
Z-STACK提供了两种低功耗运⾏模式,PM2和PM3。
PM2模式可被睡眠定时器,外部中断和复位唤醒,PM3模式可被外部中断和复位唤醒。
在Z-Stack的使⽤⽂档中得知为了使设备能够进⼊睡眠模式,必须满⾜以下的条件:1、通过添加预编译项POWER_SAVING来使能睡眠模式2、ZDO节点描述符指定“在空闲时发送功能是关闭的”,通过在f8wConfig.cfg⽂件中将RFD_RCVC_ALWAYS_ON设置为FALSE来实现。
zigbee UART 中断方式
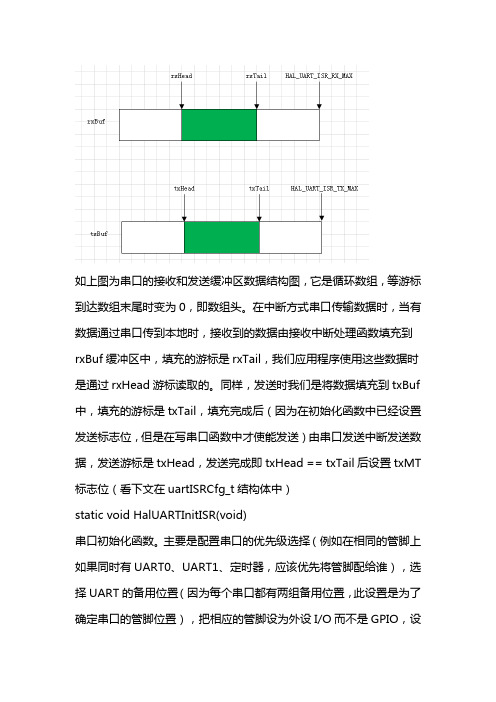
如上图为串口的接收和发送缓冲区数据结构图,它是循环数组,等游标到达数组末尾时变为0,即数组头。
在中断方式串口传输数据时,当有数据通过串口传到本地时,接收到的数据由接收中断处理函数填充到rxBuf缓冲区中,填充的游标是rxTail,我们应用程序使用这些数据时是通过rxHead游标读取的。
同样,发送时我们是将数据填充到txBuf 中,填充的游标是txTail,填充完成后(因为在初始化函数中已经设置发送标志位,但是在写串口函数中才使能发送)由串口发送中断发送数据,发送游标是txHead,发送完成即txHead == txTail后设置txMT 标志位(看下文在uartISRCfg_t结构体中)static void HalUARTInitISR(void)串口初始化函数。
主要是配置串口的优先级选择(例如在相同的管脚上如果同时有UART0、UART1、定时器,应该优先将管脚配给谁),选择UART的备用位置(因为每个串口都有两组备用位置,此设置是为了确定串口的管脚位置),把相应的管脚设为外设I/O而不是GPIO,设置为UART模式而不是SPI模式,清除(flush)串口(即初始化串口为使用前的状态)static void HalUARTOpenISR(halUARTCfg_t *config)串口打开函数,其实是串口的进一步初始化函数。
typedef struct{bool configured;uint8 baudRate;bool flowControl;uint16 flowControlThreshold;uint8 idleTimeout;halUARTBufControl_t rx;halUARTBufControl_t tx;bool intEnable;uint32 rxChRvdTime;halUARTCBack_t callBackFunc;}halUARTCfg_t;首先设置串口的回调函数,然后根据给定的参数配置串口波特率、8/9位数据位、有无奇偶校验、停止位等串口相关的参数;若使能硬件流控制,将相应的RTS和CTS管脚也设为外设管脚而不是GPIO;最后接收器使能(UxCSR |= CSR_RE;注意顺序,必须配置完串口其他参数后才能使能),配置接收器中断使能位(URXxIE = 1),设置发送标志位(UTXxIF = 1;)(不知为何)uint16 HalUARTReadISR(uint8 *buf, uint16 len)串口读函数。
物联网系列专业课程之ZStack无线协议栈培训课件

- ZStack通用配置文件
-DZIGBEEPRO -DREFLECTOR
# 启用ZigBee Pro 协议栈 # 允许绑定
-DDEFAULT_CHANLIST # 选择默认频道,通过在f8wConfig.cfg里面解除注释对应行来选择频道
-DZDAPP_CONFIG_PAN_ID # 通过改变PAN_ID来识别同一个频道里的不同ZigBee网络。
if (event & MY_REPORT_EVT) { myReportData(); osal_start_timerEx( sapi_TaskID, MY_REPORT_EVT, REPORT_DELAY );
} }
sapi接口 - zb_HandleKeys函数
zb_HandleKeys函数
行路由功能的父设备。因此,如果End Device想发送信息给另外一个End Device,在发送信息之 间将会启动路由探测功能,找到相应的父路由节点。
ZStack软件流程
整个ZStack的主要工作流程,大致分为系统启动,驱动初始化,OSAL初始化和启动, 进入任务轮循几个阶段:
开始
关中断
初始化存储器
sapi接口 - zb_HandleOsalEvent函数
zb_HandleOsalEvent函数
作用
当一个任务事件发生了之后,调用这个函数
参数
event:产生的时间
返回
无
示例
通过自己自定义一个事件来增加自己想要增加的功能 void zb_HandleOsalEvent( uint16 event ) {
MT_SAPI_CB_FUNC # 允许MT处理SAPI返回信息
ZStack无线协议栈 ZStack sapi软件框架 ZStack综合组网实验 ZStack通信协议解析
ZigBee学习之7

根据Z-Stack1.4.3-1.2.0中OSAL API_F8W-2003-0002_.pdf文档翻译。
Z-Stack1.4.3及以后的版本中引入了一个OS的概念,把应用层和堆栈层进行了分离,但是这个操作系统并不是时实的操作系统,所以有兴趣的话还可以将其改为时实的操作系统,或者用其他开源的实时操作系统取代,比如USOS,呵呵。
我将这个OS的API文档进行了一定的翻译,当然所谓一定,就是说有的地方没有翻译出来罗,要么是我不会的,要么就是我觉得没必要翻译的东西,总之,提供给各位一个参考,最好是对照原文档来阅读拉。
没接触过操作系统,也是第一次搞Zigbee,错误的地方还请各位多多指正。
OSAL(操作系统抽象层) API【OSAL API_F8W-2003-0002_.pdf】这个层次主要是将Z-Stack软件组件从特殊的处理过程相分离,将其保护起来。
一般来说提供如下几个功能:·任务的注册、初始化、开始·任务间的消息交换·任务同步·中断处理·时间管理·内存分配消息管理API消息管理API提供任务(或处理单元)间的消息交换(比如中断服务事务,控制循环中的函数调用)。
这些API能用来允许任务分配和取消分配的消息缓存,发送对其他任务的命令消息,接受应答消息。
byte *osal_msg_allocate(uint16 len)分配一个消息缓存,随后调用它的任务/函数将填充消息并调用osal_msg_send()将消息发送给其他任务。
参数:消息长度;返回值:指向消息缓存的指针,失败则为NULL。
byte osal_msg_deallocate(byte *msg_ptr)任务接收完消息后用来释放分配的消息缓存。
参数:要释放的消息缓存;返回值:ZSUCCESS - 成功INVALID_MSG_POINTER - 无效的消息指针MSG_BUFFER_NOT_AVAIL - 缓存正在队列(queued)byte osal_msg_send(byte destination_task,byte *msg_ptr)向其他任务或处理单元发送命令或数据消息。
基于Z-Stack的传感器中断添加实验
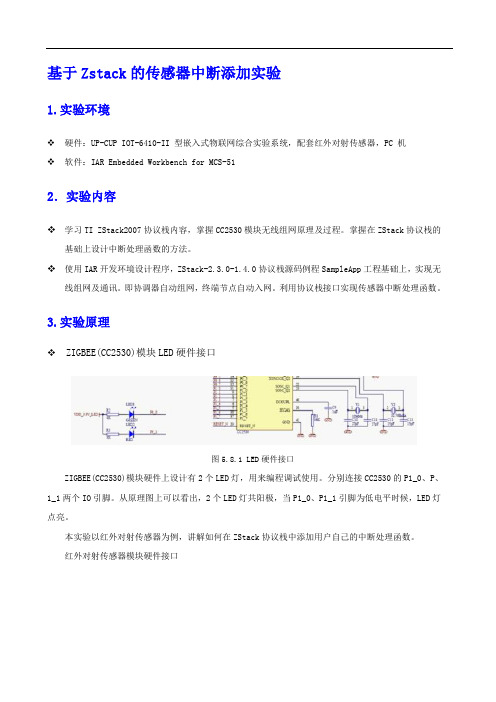
基于Zstack的传感器中断添加实验1.实验环境硬件:UP-CUP IOT-6410-II 型嵌入式物联网综合实验系统,配套红外对射传感器,PC 机软件:IAR Embedded Workbench for MCS-512.实验内容学习TI ZStack2007协议栈内容,掌握CC2530模块无线组网原理及过程。
掌握在ZStack协议栈的基础上设计中断处理函数的方法。
使用IAR开发环境设计程序,ZStack-2.3.0-1.4.0协议栈源码例程SampleApp工程基础上,实现无线组网及通讯。
即协调器自动组网,终端节点自动入网。
利用协议栈接口实现传感器中断处理函数。
3.实验原理ZIGBEE(CC2530)模块LED硬件接口图5.8.1 LED硬件接口ZIGBEE(CC2530)模块硬件上设计有2个LED灯,用来编程调试使用。
分别连接CC2530的P1_0、P、1_1两个IO引脚。
从原理图上可以看出,2个LED灯共阳极,当P1_0、P1_1引脚为低电平时候,LED灯点亮。
本实验以红外对射传感器为例,讲解如何在ZStack协议栈中添加用户自己的中断处理函数。
红外对射传感器模块硬件接口图5.8.2 红外对射模块硬件接口图5.8.3 ZIGBEE 模块主板 SENSOR IO/INT 接口系统配套的红外对射传感器,与ZIGBEE模块的IO/INT排针相连,这样我们可以知道,红外模块的信号线与ZIGBEE模块的P1_2 IO引脚相连。
因此我们需要在代码中将该引脚配置成中断输入模式,来监测红外对射传感器状态。
MT层串口通讯协议栈将串口通讯部分放到了MT层的MT任务中去处理了,因此我们在使用串口通讯的时候要在编译工程(通常是协调器工程)时候在编译选项中加入MT层相关任务的支持:MT_TASK,ZTOOL_P1 或ZAPP_P1。
关于传感器中断添加实验关键代码分析这个是P1中断处理函数,当红外对射传感器被隔断时,会调用此函数,通过代码分析,可以发现中断处理函数将这个中断事件以SAMPLEAPP_SEND_SENSOR_INT_EVT事件发送到应用层,再分析应用层事件处理函数可以找到里面对SAMPLEAPP_SEND_SENSOR_INT_EVT 事件的处理,调用了SampleApp_Process_SensorInt();传感器中断处理函数,这个函数是终端红外对射传感器节点要完成的,将传感器中断信号通过函数AF_DataRequest()发送给协调器通过分析应用层事件处理函数SampleApp_ProcessEvent()可知,当接收到网络数据(即发生AF_INCOMING_MSG_CMD事件)时,会调用SampleApp_MessageMSGCB( MSGpkt );处理函数通过上面两个函数可知,当协调器接收到终端节点发送过来的红外对射中断信号时,会让LED1闪烁4次,并向串口打印消息“interrupt!”。
外部中断编程方法总结(必备3篇)
外部中断编程方法总结(必备3篇)
外部中断编程方法总结第1篇
引脚配置浮空输入GPIO_Mode_IN_FLOATING(即端口什么都不接)
c文件:
h文件:
看框图和代码:(相关函数和结构体在文件里面)
1:打开输入线时钟,选择输入线,函数:GPIO_EXTILineConfig(去到函数原型查看参数选择对应参数)
2:配置EXIT_InitStruct结构体,具体配置看代码注解
具体函数和结构体在里面
1、配置分组
2、配置结构体NVIC_InitTypeDef
3、结构体的在里面找
1、在配置好GPIO、EXIT和NVIC之后需要整合在一起,如下代码
3、中断函数写在里面,其命名规则在启动文件里面
外部中断编程方法总结第2篇
- 编写中断处理函数,即中断服务例程(ISR),用于响应中断事件。
- 中断服务例程中需要执行的操作应尽量简洁,以减少对主程序的干扰,并及时清除中断标志。
示例代码:
上述代码中,通过`EXTI_Config()`函数配置了PA0引脚为上升沿触发的外部中断。
中断服务例程`EXTI0_IRQHandler()`中,当外部触发信号的上升沿到来时,LED灯状态会反转,然后清除中断标志。
外部中断编程方法总结第3篇
好了,至此就已经大致捋清楚了外部中断的配置流程,注意,不要忘记了,使用到了中断,所以必须要有昨天的NVIC控制器相关的配置,这里再来总结一个具体的伪代码:
按下对应按键,右下角的WATCH得数值会对应自增。
WSN实验报告

WSN实验报告姓名:谢莉(139074388)李福慧(139074381)专业:物联网工程131班指导老师:卫琳娜学院:计算机学院实验二 4.1 GPIO输入输出实验一.实验内容主要包含了4个实验:控制LED 灯闪烁,按键控制LED 灯开关,按键控制LED 灯闪烁,OLED 显示。
GPIO 输出控制对象为CC2530 模块上的红色和绿色LED,输出置位为0 时LED 灯点亮,置位为1 时LED 灯熄灭。
通过不同代码的运行和控制,观察LED 灯的闪烁情况。
底板上的显示屏通过运行代码,显示不同的信息。
二.实验目的1.了解CC2530 的GPIO 结构和配置原理2.学习配置按键的GPIO 口为输入模式,并采集有效按键3.如何通过程序控制由按键触发控制LED 灯4如何通过程序控制由按键触发控制LED 灯闪烁5.通过CC2530 的GPIO 模拟IIC 总线驱动OLED 显示三.实验步骤1.打开文件2.选择debug3.点击project中的rebuild all ,然后点击debug,进行编译工程并下载到目标板4.运行程序,观察结果四.实验中遇到的问题及解决方法节点模块不一样,所以左右的灯控制也会不一样。
五.实验总结通过实验一,二,三的学习大概熟悉了实验的步骤,所以在做实验的时候也比较顺利,没有遇到什么问题。
这个实验是最基础的,主要观察LED灯的变化。
实验三定时器控制实验一.实验内容实验包含使用定时器T1和T2,还有定时器T4中断。
定时器1 来改变小灯的状态,T1 每溢出两次,两个小灯闪烁一次,并且在停止闪烁后成闪烁前相反的状态。
开启定时器2的中断,计数比较溢出后产生中断来改变小灯的状态,T2 每溢出一次,红色小灯状态改变一次(由亮变暗或由暗变亮)。
用定时器 4 来改变小灯的状态,T4 每2000 次中断小灯闪烁一轮,闪烁的时间长度为1000 次中断所耗时间。
二. 实验目的1.了解CC2530 的定时器T1,T2,T4的配置和使用2.如何通过程序控制CC2530 的T1 驱动LED 灯定时点亮3. 学习定时器T4 的中断模式使用三.实验步骤1.打开文件2.选择debug3.点击project中的rebuild all ,然后点击debug,进行编译工程并下载到目标板4.运行程序,观察结果四.实验中遇到的问题及解决方法因为我们实验使用的节点模块和指导书中的模块不一样,所以现象也不同,主要区别在于闪烁的左右灯不一样,但是不影响实验结果。
ZigBee协议栈Z-Stack开发指南

2.ZigBee2.1设备类型(Device Types)在ZigBee网络中存在三种逻辑设备类型:Coordinator(协调器),Router(路由器)和End-Device(终端设备)。
ZigBee网络由一个Coordinator以及多个Router和多个End_Device组成。
上图是一个简单的ZigBee网络示意图。
其中黑色节点为Coordinator,红色节点为Router,白色节点为End-Device。
2.1.1Coordinator(协调器)协调器负责启动整个网络。
它也是网络的第一个设备。
协调器选择一个信道和一个网络ID(也称之为PAN ID,即Personal Area Network ID),随后启动整个网络。
协调器也可以用来协助建立网络中安全层和应用层的绑定(bindings)。
注意,协调器的角色主要涉及网络的启动和配置。
一旦这些都完成后,协调器的工作就像一个路由器(或者消失go away)。
由于ZigBee网络本身的分布特性,因此接下来整个网络的操作就不在依赖协调器是否存在。
2.1.2Router(路由器)路由器的功能主要是:允许其他设备加入网络,多跳路由和协助它自己的由电池供电的儿子终端设备的通讯。
通常,路由器希望是一直处于活动状态,因此它必须使用主电源供电。
但是当使用树群这种网络模式时,允许路由间隔一定的周期操作一次,这样就可以使用电池给其供电。
2.1.3End-Device(终端设备)终端设备没有特定的维持网络结构的责任,它可以睡眠或者唤醒,因此它可以可以是一个电池供电设备。
通常,终端设备对存储空间(特别是RAM的需要)比较小。
注意:在Z-Stack 1.4.1中一个设备的类型通常在编译的时候通过编译选项(ZDO_COORDINATOR 和RTR_NWK)确定。
所有的应用例子都提供独立的项目文件来编译每一种设备类型。
2.2栈配置(Stack Profil e)栈参数的集合需要被配置为一定的值,连同这些值在一起被称之为栈配置。
ZigBee学习之13——ZStack_API解读
ZigBee 学习之1313——————ZStackZStack API 解读API实现了所有ZDP(ZigBee Device Profile)定义的命令和回应所需要的函数。
ZDP 描述了ZDO 如何实现普通ZigBee 设备的特性,它定义了设备描述和簇,ZDP 为ZDO 和应用提供一下功能:•设备网络建立•设备和服务发现•节点设备邦定和解邦定服务•网络管理服务设备发现是ZigBee 设备发现其他ZigBee 设备的过程。
比如将已知的IEEE 地址作为数据载荷广播到网络的NWK 地址请求,相关设备必须回应并告知其网络地址。
服务发现提供了PAN 中一个设备发现其他设备提供的服务的能力。
它利用多种描述符去指定设备的能力。
当用户需要邦定控制器与被控设备(比如开关和灯)时,将用到邦定和解邦定服务。
特别是终端设备邦定支持利用用户的输入来定义控制/被控设备对的简单邦定方法。
邦定和解邦服务可以创建和删除邦定表入口。
网络管理服务主要提供给用户和调试工具网络管理的能力,它能够从设备重新获得管理信息,包括网络发现结果,路由表的内容,邻居节点链路质量,邦定表内容。
也可以通过解关联将设备从PAN 中脱离来控制网络关联。
ZDO 设备网络建立在ZigBee 网络中默认ZDApp_Init()[in ZDApp.c]开始器件的启动,但是应用能覆盖整个默认行为,为了使应用接管网络的启动,必须在编译选项中包含HOLD_AUTO_START,推荐同时包含NV_RESTORE(储存ZigBee 网络状态到NV)编译选项,包含这个两个编译选项后就需要调用ZDOIni tDevice()来启动网络中的设备。
uint8ZDOInitDevice(uint16startDelay )启动网络中的设备。
如果应用想要强制一个“新的”加入(即不恢复网络状态),则应该先调用z gWriteStartupOptions(ZG_STARTUP_SET,ZCD_STARTOPT_DEFAULT_NETWORK_STATE)来设置ZCD_NV_STARTUP_OPTION 中的ZCD_STARTOPT_DEFAULT_NETWORK_STATE 位。
外部中断实验遇到的问题和解决方法
外部中断实验遇到的问题和解决方法一、实验背景外部中断是指由外部设备或者其他引起的中断请求,例如按键、传感器等。
在单片机开发中,外部中断是非常重要的一种中断方式,它可以使单片机在执行某些任务时可以及时响应外界的事件。
二、实验目的本实验旨在通过使用STM32F103C8T6开发板和Keil uVision 5软件,学习如何配置和使用STM32F103C8T6外部中断,并解决在实验过程中可能遇到的问题。
三、实验步骤1. 硬件连接将STM32F103C8T6开发板上的PB0引脚连接到按键上,并将按键另一端连接到GND引脚上。
2. 配置GPIO口初始化首先需要配置PB0引脚为输入模式,并且使能其时钟。
具体代码如下:```RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 使能GPIOB口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; // PB0引脚GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 输入模式,带上拉GPIO_Init(GPIOB, &GPIO_InitStructure); // 初始化PB0口```3. 配置NVIC初始化需要配置NVIC(Nested Vector Interrupt Controller)初始化,使能外部中断并设置优先级。
具体代码如下:```NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; // 外部中断0对应的中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级为1NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; // 子优先级为1NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能中断通道NVIC_Init(&NVIC_InitStructure); // 初始化NVIC```4. 配置外部中断初始化需要配置外部中断初始化,设置外部中断触发方式。
zigbee学习之路(四):按键控制(中断方式)
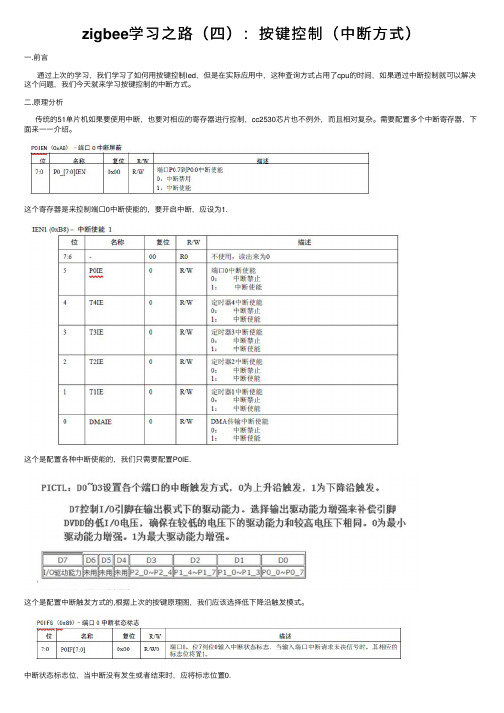
zigbee学习之路(四):按键控制(中断⽅式)⼀.前⾔通过上次的学习,我们学习了如何⽤按键控制led,但是在实际应⽤中,这种查询⽅式占⽤了cpu的时间,如果通过中断控制就可以解决这个问题,我们今天就来学习按键控制的中断⽅式。
⼆.原理分析传统的51单⽚机如果要使⽤中断,也要对相应的寄存器进⾏控制,cc2530芯⽚也不例外,⽽且相对复杂。
需要配置多个中断寄存器,下⾯来⼀⼀介绍。
这个寄存器是来控制端⼝0中断使能的,要开启中断,应设为1.这个是配置各种中断使能的,我们只需要配置P0IE.这个是配置中断触发⽅式的,根据上次的按键原理图,我们应该选择低下降沿触发模式。
中断状态标志位,当中断没有发⽣或者结束时,应将标志位置0.#include <ioCC2530.h>#define uint unsigned int#define uchar unsigned char#define LED1 P1_0 //LED1为P1_0端⼝控制#define LED2 P1_1 //LED2为P1_1端⼝控制#define LED3 P1_4 //LED3为P1_4端⼝控制//函数声明 void Delayms(uint);//延时函数 void InitLed(void);//LED_IO初始化 void KeyInit(void);//KEY_IO初始化/************** 函数名 : Delayms 功能描述 : 毫秒延时输⼊参数 : xms:延时时间,如 i=xms 即延时i毫秒输出参数 : none 返回值 : none **/void Delayms(uint xms){ uint i,j;for(i=xms;i>0;i--)for(j=587;j>0;j--);}/******************* 函数名 : InitLed 功能描述 : LED_IO初始化输⼊参数 : none 输出参数 : none 返回值 : none*********************************/void InitLed(void){ P1DIR |= 0xff; //P1端⼝定义为输出LED1 = 1; //LED1灯熄灭LED2 = 1; //LED2灯熄灭LED3 = 1; //LED3灯熄灭 }/********************* 函数名 : InitKey 功能描述 : KEY_IO初始化(中断⽅式配置) 输⼊参数 : none 输出参数 : none 返回值 : none ******************/void InitKey(void){ P0IEN |= 0x10; //设置P0_4为中断⽅式IEN1 |= 0x20; //允许P0⼝中断PICTL |= 0x01; //下降沿触发P0IFG = 0x00; //清中断标志位EA = 1; //开总中断 }/************** 函数名 : P0_ISR 功能描述 : 中断处理函数输⼊参数 : none 输出参数 : none 返回值 : none ***********/#pragma vector = P0INT_VECTOR //格式:#pragma vector = 中断向量__interrupt void P0_ISR(void) //接着是中断处理程序(函数名可以任意取){ LED1=~LED1; //改变LED状态LED2=~LED2;LED3=~LED3;P0IFG = 0; //清中断标志/******************* 函数名 : main 功能描述 : KEY测试(通⽤IO中断的使⽤) 输⼊参数 : NONE 输出参数 : NONE 返回值 : NONE************/void main(void){ InitLed(); //调⽤初始化函数InitKey();while(1); }四.总结led的控制函数和之前⼀样,⼤家要注意中断函数的定义,这是⼀种定义中断的格式,还有⼀定要使POIF=0,⽤来清除标志位,这样中断才能发⽣,还有⼤家学会⽤模块化的思想去写程序。
Z-Stack协议栈的简单总结

Z-Stack协议栈的简单总结Z-Stack 是通过UCOS来实现的,其中协议的各个层被分配一个任务,共有如下任务:Hal、mac、nwk、MT(Monitor Test简称)、APS、ZDApp和SampleApp。
Hal、mac、nwk、APS就不介绍了(主要完成zigbee协议的各个层)。
TI为了使用户调试方便而编写一些上位机软件(如SmartRF04Prog、sniffer、Z-Location Engine等),而MT(Monitor Test)是用来完成协议栈与这些上位机软件的通信的,通过串口来完成,因而MT中主要完成的是串口指令的收发机解析,并经该消息发给OS,由操作系统对这些消息进行处理。
ZDApp(ZigBee Deviece Application)是zigbee设备的应用层处理函数,可以通过这层的函数来与网络层和APS层进行通信,如完成组网,加入网络,端点匹配、绑定等。
SampleApp是用户完成的部分(也分配了一个任务),主要在这里完成自己的编程设置。
OS中每个任务都有一个任务初始化函数和任务事件处理回调函数,如SampleApp_Init( taskID )和SampleApp_ProcessEvent( byte task_id, UINT16 events )。
如果需要深入了解任务的工作机制,如任务管理、调度任务的同步与通信等,可以去看uC/OS得相关资料。
而任务下面又划分很多事件(可以把事件理解为当前任务下的一些小的任务)。
在OS中事件是为了实现任务间的同步与通信的,如信号量、消息邮箱和消息队列。
单片机基础对于OS不胜了解的可以这样来理解,自己当初也是这样来理解的(可以把任务中的发送事件理解为置标志位,在本任务或另一个任务中查询标志位来完成相应操作)在uCOS中任务和事件的处理是由操作系统来完成的,任务按照优先级来调度,每个任务有自己的任务控制块来决定和记录任务的执行情况,而事件有事件控制块。
ZigBee协议栈-Z-Stack API介绍(ZDO网络启动)

Z-Stack API
10
ZigBee 设备对象(ZDO
返回值:这个函数将返回下面值之一:
Z-Stack API
7
ZigBee 设备对象(ZDO)
网络管理服务提供了检索设备管理信息的功能,包括网络发现结果、 路由表内容、到周边节点的链路质量以及绑定表内容。它还提供了 通过断开与个人区域网络设备的联系来控制网络联系的功能。网络 管理服务主要是针对用户或调试工具而设计,用来管理网络。
以上三种功能的API将在下面分别讨论。
ZDP描述了ZDO内部一般性的ZigBee 设备功能是如何实现的。它定义了使用命令和 响应对的设备描述和簇。通过定义命令结构体的信息,ZDP为ZDO和应用程序提供了 如下功能:
• 设备网络启动 • 设备和服务发现 • 终端设备绑定、绑定和取消绑定服务 • 网络管理服务
Z-Stack API
5
ZigBee 设备对象(ZDO)
Z-Stack API
6
ZigBee 设备对象(ZDO)
典型的绑定用于网络配置期间,即当用户需要将控制设备绑定到被控制设 备(比如开关和灯光)时。特别地,终端设备绑定支持一个简化的绑定方 法,即使用用户的输入来识别控制或被控制的设备对。绑定和取消绑定服 务提供了创建和删除绑定表条目的功能,其中绑定表的功能是记录控制信 息及其各自的目的地。
Z-Stack API
3
层次)的API 提供一般性的支持服务,能同时用 于ZDO 层和制造商定义的应用对象 NWK 层 ZigBee 网络层(NWK)为更高层次的(应用层)组件提供管理 和数据服务。
路由(Routing)——ZigBee协议栈Z-Stack开发指南

路由(Routing)——ZigBee协议栈Z-Stack开发指南4.1路由概述A mesh network is described as a network in w hich the routing of messages is performed as a decent ralized,cooperati v e process involving many peer devi c es routing on each others’ behalf.路由对与应用层来说是完全透明的。
应用程序只需简单的向下发送去往任何设备的数据到栈中,栈会负责寻找路径。
这种方法,应用程序不知道操作是在一个多跳的网络当中的。
路由还能够自愈ZigBee网络,如果某个无线连接断开了,路由功能又能自动寻找一条新的路径避开那个断开的网络连接。
这就极大的提高了网络的可靠性,同时也是ZigBee网络的一个关键特性。
4.2路由协议(Routing Protocol)ZigBee执行基于用于AODV专用网络的路由协议。
简化后用于传感器网络。
ZigBee路由协议有助于网络环境有能力支持移动节点,连接失败和数据包丢失。
当路由器从他自身的应用程序或者别的设备那里收到一个单点发送的数据包,则网络层(NWK Layer)根据一下程序将它继续传递下去。
如果目标节点是它相邻路由器中的一个,则数据包直接被传送给目标设备。
否则,路由器将要检索它的路由表中与所要传送的数据包的目标地址相符合的记录。
如果存在与目标地址相符合的活动路由记录,则数据包将被发送到存储在记录中的下一级地址中去。
如果没有发现任何相关的路由记录,则路由器发起路径寻找,数据包存储在缓冲区中知道路径寻找结束。
ZigBee终端节点不执行任何路由功能。
终端节点要向任何一个设备传送数据包,它只需简单的将数据向上发送给它的父亲设备,由它的父亲设备以它自己的名义执行路由。
同样的,任何一个设备要给终端节点发送数据,发起路由寻找,终端节的的父亲节点都已它的名义来回应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ZigBee学习Z-stack外部中断
硬件抽象层:就是对硬件层做好了各种初始化,用户不用考虑硬件的初始配置,直接使用即可。
hal_driver.c文件:
HalDriverInit():用户可在此函数中添加硬件的初始化操作,如定时器、ADC、DMA、FLASH、AES、LCD、LED、UART、KEY、SPI、HID等(还有用于配置外部中断,类似按键的中断方式查询键值)
Hal_ProcessEvent():
处理HAL发生的事件、如:KEY、LED、电源管理等,用户可以在此添加处理自己的HAL事件,此事件ID必须是唯一的,定义在hal_driver.h中。
如:HAL_KEY_EVENT(按键轮询与抖动)、HAL_LED_BLINK_EVENT(LED闪烁)、HAL_SLEEP_TIMER_EVENT(Power saving).
Hal_ProcessPoll():
被osal_start_system()调用,用于HAL_Timer和HAL_UART的事件轮询,关于系统编译连接,只要没有定义相关的宏定义,相应的驱动就不会编译进去,减少代码占用的空间。
有以下的宏定义:
具体操作是:
Options->C/C++
Options->Preprocessor->Defined Symbols->enter:HAL_XXX=TRUE;
when XXX is ADC,UART,LED,LCD,KEY
不编译进代码,只要将其定义成FALSE
如何定做适合自己的HAL处理的程序
①修改原文件的方式:
1、HAL\include下的头文件应该保留一样。
2、在HAL\Target\hal_xxx.c修改相应的驱动函数,hal_adc.c, hal_key.c, hal_lcd.c, hal_led.c, hal_timer.c, and hal_uart.c
3、硬件驱动配置可以被修改在hal_board_cfg.h
②增加用户自己的目标驱动
1、增加新的头文件,在hal\include
2、在hal\Target\hal_xxx.c添加自己运行函数,xxx为自己的目标
3、如果GPIO有冲突或者没用到,应该保证驱动不被编译,否则后果严重。
4、检查GPIO有没有正确设置或冲突,通过hal_board_cfg.h
5、不想被编译,或者是老的文件,没用到的文件,可以通过选择options->"Exclude form build"
外部中断程序中断处理函数的定义:可以查看
hal\Target\hal_XXX.c\hal_mcu.h
HAL_ISR_FUNCTION(f,v)
HAL_ISR_FUNCTION (prototype, vector)
{
/* Do something when this interrupt happens!!! */
}
prototype是中断名称,vector是中断向量
①如何修改存在GPIO外部中断处理函数?
Example: Modify P1INT_VECTOR interrupt service routine in a CC2430 project. P1INT_VECTOR interrupt service routine is declared in hal_key.c.
HAL_ISR_FUNCTION (halKeyPort1Isr, P1INT_VECTOR)
{
halProcessKeyInterrupt ();//中断处理函数
}
增加新的中断处理函数
首先新建头文件,定义中断向量和定义要用到的GPIO地址,
(包函ioCC2530.h 即可)
ex:创建定时器1中断处理程序(T1_VECTOR)(中断向量定义在ioCC2530.h 中)主要就是,知道中断向量表的宏定义,然后使用HAL_ISR_FUNCTION(prototype, vector)建立处理函数。
现在就外部中断例子做以下笔记
新建一个hal_xxx.c文件和hal_xxx.h文件,此hal_xxx.h文件要在hal_driver.c 中包含,主要是使用hal_xxx.c定义外部中断初始化函数,而使用此初始化函数是在HalDriverInit中,在结尾中调用即可,就可以启动外部中断了,如以下
voidLightAdjInit( void )
{
/* Initialize previous key to 0 */
P1SEL&=~(1<<2);//设置P1_2为一般IO口功能
P1DIR&=~(1<<2);//设置P1_2为输入功能
P2INP&=~(1<<2);//设置为上拉
P1IEN|=(1<<2);//P1_2中断使能
PICTL&=~(1<<1);//上升沿引起中断
EA=1;//开启总中断
IEN2|=(1<<4);//端口1中断使能
P1IFG=0;//初始化中断标志位
}设置P1_2外部中断,此函数在hal_xxx.c文件中编写,
在hal_xxx.c中包含相应头文件,编写处理中断的函数和中断函数LightInterrupt(),HAL_ISR_FUNCTION( light_adj, P1INT_VECTOR )
light_adj是中断相应函数名,随便起,P1INT_VECTOR是中断向量,参考ioCC2530.h 在LightInterrupt中想产生相应事件,应该要定义相应的宏,在hal_drivers.h中定义,注意事件的定义规则,只能以0x0001/0x0002/0x0004/0x0008这样不同的位置定义,因此对于每个任务只能定义16个事件
事件的处理要看相应的任务,一般在Hal_ProcessEvent()函数中编写处理如:
if(events & HAL_LIGHT_EVENT)
{
LED2_SBIT=~LED2_SBIT;
return events ^ HAL_LIGHT_EVENT;
}
在外部中断处理函数中产生事件,可以使用osal_start_timerEx (Hal_TaskID, HAL_LIGHT_EVENT, 10);也可以使用osal_set_event(Hal_TaskID,UART_RX_CB_EVT);等让相应的任务处理事件。