西工大2013-2015年946(自动控制原理)专业综合考试大纲
946自动控制原理大纲
946自动控制原理大纲自动控制原理是专门研究自动控制系统的基本概念、理论和方法的学科。
下面是一份关于自动控制原理的大纲:1. 引言- 自动控制的基本概念- 自动控制原理的发展历程- 自动控制的应用领域2. 系统建模与描述- 系统的概念与分类- 系统的数学描述方法- 传递函数与状态空间模型3. 信号与系统分析- 信号的分类与性质- 系统的时域分析方法- 系统的频域分析方法4. 控制系统的性能指标- 稳定性与稳定裕度- 响应时间与超调量- 频率响应特性5. 控制系统的设计方法- 传统控制方法- P、PI、PID控制- 校正器设计- 标校与校正- 现代控制方法- 状态反馈控制- 最优控制- 自适应控制6. 控制系统的稳定性分析- Bode稳定判据- Nyquist稳定判据- 级连与反馈系统的稳定性7. 控制系统的校正与优化- PID参数整定方法- 控制系统的最优性能- 鲁棒性与鲁棒控制8. 开环控制与闭环控制- 开环控制系统的特点与应用- 闭环控制系统的特点与应用- 开环与闭环系统的比较分析9. 多变量控制系统- 多变量系统的描述与模型- 多变量控制系统的稳定性分析- 多变量控制系统的设计与鲁棒控制10. 非线性控制系统- 非线性系统的性质与特点- 非线性控制系统的稳定性分析- 非线性控制系统的设计方法11. 离散控制系统- 连续与离散系统的转换- 离散控制系统的稳定性分析- 离散控制系统的设计与优化12. 实时控制系统与嵌入式系统- 实时控制系统的特点与应用- 实时控制系统的建模与设计- 嵌入式控制系统的设计与应用以上是关于自动控制原理的一份大纲,内容包括了自动控制系统的基础知识、系统建模与描述、控制系统的性能指标、设计方法与稳定性分析等方面的内容。
这些内容可以帮助理解和应用自动控制原理,在工程实践中具有重要的指导作用。
(完整)《自动控制原理》考试大纲概要
《自动控制原理》考试大纲一、考试对象电气工程及其自动化、测控技术与仪器等专业本科插班生二、考试目的《自动控制原理》课程考试旨在考察学生对自动控制系统的基本概念、基本原理及基本分析方法的掌握和运用,着重考察学生应用适当数学工具和基本原理,用不同方法对系统进行分析的能力.本门课程考核要求由低到高共分为“了解"、“掌握"、“熟练掌握”三个层次。
其含义:了解,指学生能懂得所学知识,能在有关问题中认识或再现它们;掌握,指学生清楚地理解所学知识(例如定理的条件与结论,公式的表述与使用范围等),并且能在基本分析和简单应用中正确地使用它们;熟练掌握,指学生能较为深刻理解所学知识,在此基础上能够准确、熟练地使用它们分析解决较为简单的实际问题。
三、考试方法和考试时间1、考试方法:(闭卷笔试)2、记分方式:百分制,满分为100分3、考试时间:120分钟4、试题总数:五大题(部分大题中含有若干个小题)5、命题的指导思想和原则命题的总的指导思想是:全面考查学生对本课程的基本原理、基本概念和主要知识点学习、理解和掌握的情况。
命题的原则是:最基本的知识一般要占60%左右,稍微灵活一点的题目要占20%左右,较难的题目要占20%左右,其中大多数是大题目。
客观性的题目占的分量较少。
6、题目类型(1)填空题(每题3分,约15分)(2)选择题(每题3分,约15分)(3)简答题(每题10分,约10分)(4)分析计算题(约40分)(5)作图题(每题10分,约20分)7、答题要求(1)简答题:只要求答出要点,如果本身所表示的意思不明确,则需要对要点稍作说明.若要点本身所表示的意思已经很明确,就无需再作说明。
(2)分析计算题:分析思路清晰,公式表述清楚;解题时思路清楚,步骤完整,格式规范化。
这类题一般按演算步骤记分,如果计算结果不对,但演算步骤对了,仍可得一定分数。
(3)作图题:要求作图步骤清楚,若图未做完,可按作图步骤得一定分数。
西北工业大学—自动控制原理
联系并准备
实验二:典型环节模拟 实验三:二阶系统特征参数对性能的影响
联系地点: 实验大楼 12 楼
联 系 人: 杨建华 (实验中心主任)
§3.5
线性系统的稳定性分析
§3.5.1 稳定性的概念 lim k(t) 0 t
§3.5.2 稳定的充要条件
系统闭环特征方程的所有根都具有负的实部 或所有闭环特征根均位于左半s平面
自动控制原理
西北工业大学自动化学院
自动控制原理教学组
自动控制原理
本次课程作业(9)
3 — 8, 9, 10
自动控制原理
(第 9 讲) §3 线性系统的时域分析与校正
§3.1 概述 §3.2 一阶系统的时间响应及动态性能 §3.3 二阶系统的时间响应及动态性能 §3.4 高阶系统的阶跃响应及动态性能 §3.5 线性系统的稳定性分析 §3.6 线性系统的稳态误差 §3.7 线性系统时域校正
§3.5
线性系统的稳定性分析(2)
§3.5.2 稳定的充要条件
根据系统稳定的定义,若 lim k(t) 0 ,则系统是稳定的。
t
必要性: (s) M (s) bm (s z1 ) (s z2 ) (s zm ) D(s) an(s 1 ) (s 2 ) (s n )
充分性:
C(s) (s)
解. 列劳斯表
s5 1
0
s4 2
0
s3 80
00
s2 e0
-2
s1 16 /e
0
s0 -2
-1
-2
列辅助方程: 2s4 2 0
d 2s4 2 8s3 0
ds
第一列元素变号一次,有一个正根,系统不稳定
§3.5
自动控制原理考研大纲

《自动控制原理》考研大纲科目名称:控制理论适用专业:仿生装备与控制工程参考书目:《自动控制原理》第六版,胡寿松编,科学出版社;《自动控制理论》第二版,邹伯敏编,机械工业出版社;《现代控制理论基础》第二版,王孝武主编,机械工业出版社考试时间:3小时考试方式:笔试总分:150分考试范围:包括经典控制理论(不包含非线性部分)与现代控制理论两部分,经典控制理论内容占70%,现代控制理论内容占30%。
经典控制理论部分第一章绪论1. 掌握自动控制系统的工作原理、自动控制系统的组成与几种不同分类。
2. 重点掌握反馈的概念、基本控制方式、对控制系统的基本要求。
第二章线性系统的数学模型控制理论的两大任务是系统分析与系统设计,系统分析和设计中首先要建立被研究系统的数学模型。
本章主要给出古典控制理论使用的系统数学模型——传递函数的建立。
本章要求:1.掌握的概念:传递函数;极点、零点;开环传递函数、闭环传递函数、误差传递函数;典型环节的传递函数。
2.重点掌握建立电气系统、机械系统的微分方程和传递函数模型的方法。
3.重点掌握方框图化简或信号流图梅森增益公式获得系统传递函数的建模方法。
第三章控制系统时域分析根据研究系统采用的不同数学模型,分析方法是不同的,本章给出利用系统传递函数数学模型求取时间响应的系统时域分析法。
主要是分析系统的三大基本性能,即系统的稳(稳定性)、准(准确性)、快(快速性)。
稳定性是系统工作的必要条件;快速性和相对稳定程度(振荡幅度)是评价系统动态响应的性能指标;准确性是指系统稳态响应的稳态精度,用稳态误差来衡量,需注意:讨论的稳态误差是指由输入信号和系统结构引起的系统稳态时的误差。
本章要求:1.掌握的概念:稳定性;动态(或暂态)性能指标(最大超调量、上升时间、峰值时间、调整时间);稳态(静态)性能指标(稳态误差);一阶、二阶系统的主要特征参量;欠阻尼、临界阻尼、过阻尼系统特点;主导极点。
2.重点掌握系统稳定性判别(Routh判据);稳态误差终值计算(包括三个稳态误差系数的计算);二阶系统动态性能指标计算。
812《自动控制原理》考试大纲

《自动控制原理》考试大纲一、基本要求掌握控制系统分析和综合基本方法,主要内容有传递函数和信号流图等数学模型的建立;系统稳定性、动态性能、稳态性能的时域分析;频域法和根轨迹法;系统串联校正的设计方法;线性离散系统的分析;系统状态空间建模及其求解;系统可控性和可观测性;线性定常系统状态反馈及观测器设计;李雅普诺夫稳定性理论。
二、考试范围.自动控制的一般概念()自动控制系统的定义、构成;()自动控制系统的基本控制方式;自动控制系统的分类;()对控制系统的基本要求;.控制系统的数学模型()传递函数的定义、性质及典型环节的传递函数;()信号流图的组成、建立及梅森增益公式;()闭环系统的传递函数:输入量及扰动量作用下的传递函数、误差传递函数。
.线性系统的时域分析法()一阶系统动态性能;()二阶系统的动态性能:典型二阶系统的数学模型、欠阻尼阶跃响应、二阶系统的动态性能指标、二阶系统性能的改善;()控制系统的稳定性分析及代数稳定判据;()控制系统的稳态性能分析:稳态误差的定义、系统类型、稳态误差分析与静态误差系数。
.线性系统的根轨迹法()根轨迹方程:幅值条件和相角条件;()度根轨迹作图的一般规则、典型的零、极点分布及其相应的根轨迹;()系统性能分析:稳定性分析、增加零、极点对根轨迹的影响、利用主导极点估计系统的性能指标;.线性系统的频域分析法()频率特性;()典型环节与开环系统的频率特性;()奈奎斯特稳定判据及应用;()稳定裕度;.线性系统的校正法()校正装置:超前、滞后网络的特性;()系统校正的频率响应法:超前、滞后校正设计;()控制器:控制法则及对系统性能的影响。
. 线性离散系统的分析() 信号采样和保持;() 离散系统数学模型:差分方程和脉冲传递函数;() 离散系统稳定性及稳定性判据;() 离散系统稳态误差及动态性能分析;. 线性系统的状态空间分析与综合() 线性系统的状态空间描述:建立、转换、标准型;线性系统的运动分析状态方程的解;() 线性系统的可控性和可观测性;() 线性定常系统的线性变换;() 线性定常系统的状态反馈极点配置和全维状态观测器设计;() 李雅普诺夫稳定性分析。
自动控制原理考试大纲
主观题约67分
1.计算题约20分
2.分析综合题约37分
3.设计综合题约10分
三、考试内容与要求
(一)自动控制的基本概念及控制系统的数学模型
考试内容
反馈控制原理;开环和闭环控制;自动控制系统的分类、基本组成和基本要求;控制系统的时域及复域数学模型;控制系统的结构图及其化简。
考试要求
1.了解基本概念:自动控制、反馈控制、开环控制与闭环控制、传递函数、系统的方框图。
(三)线性系统的根轨迹法
考试内容
控制系统根轨迹的基本概念;根轨迹方程及绘制根轨迹的基本法则;系统性能的分析。
考试要求
1.了解系统根轨迹的基本概念。
2.理解 和零度根轨迹的对应关系以及开环零、极点分布与根轨迹形状间的对应关系。
3.掌握根轨迹与系统性能的关系。
(四)线性系统的频域分析法
考试内容
频率特性;典型环节;开环系统的频率特性(幅相曲线与对数频率特性曲线);频率域稳定判据;控制系统相对稳定性;闭环系统的频域性能指标及其与时域指标的关系。
二、试卷结构(满分100分)
内容比例:
自动控制的基本概念及控制系统的数学模型约13分
线性系统的时域分析法约23分
线性系统的根轨迹法约6分
线性系统的频域分析法约30分
线性系统的校正方法约12分
线性离散系统的分析及非线性控制系统分析约6分
综合设计约10分
题型比例:
客观题约33分
1.选择题约10分
2.判断题约13分
考试要求
1.了解系统的设计与校正问题。
2.理解反馈校正综合设计法的应用。
3.掌握典型校正环节对系统的校正作用;串联校正的分析法设计;串联校正参数的确定
西北工业大学自动控制原理考试试题汇总

装订线注:2. 命题教师和审题教师姓名应在试卷存档时填写。
共4页 第1页学号:姓名:自动控制原理试题A (56学时)答案及评分标准一、答案:A C B B A D C D C B评分标准:每小题2分二、1、答案:()12314()12314123141C S R S G G G G G G G G G G H G G H G +++--=评分标准:15分(按步骤给分)2、答案:%16.3 1.4s σ=s =% t 评分标准:10分,每一问5分3、答案:(1)*13K ω=-==12a d = d 3K (2) 13<<15评分标准:15分 第一问10分,第二问5分4、答案:(1) (2) K=80K <<评分标准: 15分 第一问8分,第二问7分 5、答案:(1) ()(1)(11020K G s s ss ++=)033.4γ=- K=100(2) 3.1251()1001c s G s s ++=(3) 0100(3.1251)()(1)(1)(10011020'57.7c s GG s s s s s γ+⎧⎪⎪+++⎨⎪=⎪⎩=) 评分标准:25分 第一问10分,第二问5分,第三问10分装订线注:2. 命题教师和审题教师姓名应在试卷存档时填写。
共4页 第1页学号:姓名:自动控制原理试题B (56学时)答案及评分标准一、 答案:C D B A B C A D C B评分标准:每小题2分二、1、答案:%16.3 1.4s σ=s =% t评分标准:10分,每一问5分2、答案:(1)*13K ω=-==12a d = d 3K (2) 13<<评分标准:15分 第一问10分,第二问5分 3、答案:()12314()12314123141C S R S G G G G G G G G G G H G G H G +++--=评分标准:15分(按步骤给分) 4、答案: (1) ()(1)(11020K G s s s s )++= K=10033.4γ=-(2) 3.12511001c S G S ++=(3) 0100(3.1251)()(1)(1)(1001)1020'57.7c s GG s s s s s γ+⎧⎪⎪+++⎨⎪=⎪⎩=评分标准:25分 第一问10分,第二问5分,第三问10分5、 答案:(1) (2) K=80K <<15评分标准: 15分 第一问8分,第二问7分诚信保证本人知晓我校考场规则和违纪处分条例的有关规定,保证遵守考场规则,诚实做人。
西北工业大学自动控制原理9596现代控制理论基础05大纲考研真题考研试题

5. 自适应控制部分:自适应控制系统的概念和特点、自适应控制系统的分类、模型参考 自适应控制系统和自 1.周凤岐等,《现代控制理论及应用》,电子科技大学出版社,1999 2.周凤岐、强文鑫、阙志宏,《现代控制理论引论》,国防工业出版社,1988 3.也可根据以上考试大纲选用其他参考书。
题号: 936
西北工业大学 2005 年硕士研究生入学考试大纲 考试科目:《现代控制理论基础》
一、考试内容 本课程考试内容注重现代控制理论的基本概念、基本原理和基本方法,据此对考试内容
作以下要求: 1. 线性控制系统部分:状态空间描述的基本概念,线性定常系统状态方程的求解、系统
可控性和可观性的概念和判别、李雅普诺夫稳定性概念和判据、极点配置的条件和方法、全 维状态观测器的设计;
2. 最优控制部分:最优控制的性能指标类型、无约束和有约束条件下的泛函极值问题求 解、极小值原理、动态规划的基本原理和方法、基于二次型性能指标的状态调节器设计、输 出调节器设计;
3. 最优估计部分:最小方差估计与线性最小方差估计、最小二乘法估计、卡尔曼滤波问 题的提法、正交定理、离散系统卡尔曼最优预测基本方程、连续系统卡尔曼滤波基本方程、 滤波的稳定性概念;
自动控制原理考研大纲
《自动控制原理》考研大纲科目名称:控制理论适用专业:仿生装备与控制工程参考书目:《自动控制原理》第六版,胡寿松编,科学出版社;《自动控制理论》第二版,邹伯敏编,机械工业出版社;《现代控制理论基础》第二版,王孝武主编,机械工业出版社考试时间:3小时考试方式:笔试总分:150分考试范围:包括经典控制理论(不包含非线性部分)与现代控制理论两部分,经典控制理论内容占70%,现代控制理论内容占30%。
经典控制理论部分第一章绪论1. 掌握自动控制系统的工作原理、自动控制系统的组成与几种不同分类。
2. 重点掌握反馈的概念、基本控制方式、对控制系统的基本要求。
第二章线性系统的数学模型控制理论的两大任务是系统分析与系统设计,系统分析和设计中首先要建立被研究系统的数学模型。
本章主要给出古典控制理论使用的系统数学模型——传递函数的建立。
本章要求:1.掌握的概念:传递函数;极点、零点;开环传递函数、闭环传递函数、误差传递函数;典型环节的传递函数。
2.重点掌握建立电气系统、机械系统的微分方程和传递函数模型的方法。
3.重点掌握方框图化简或信号流图梅森增益公式获得系统传递函数的建模方法。
第三章控制系统时域分析根据研究系统采用的不同数学模型,分析方法是不同的,本章给出利用系统传递函数数学模型求取时间响应的系统时域分析法。
主要是分析系统的三大基本性能,即系统的稳(稳定性)、准(准确性)、快(快速性)。
稳定性是系统工作的必要条件;快速性和相对稳定程度(振荡幅度)是评价系统动态响应的性能指标;准确性是指系统稳态响应的稳态精度,用稳态误差来衡量,需注意:讨论的稳态误差是指由输入信号和系统结构引起的系统稳态时的误差。
本章要求:1.掌握的概念:稳定性;动态(或暂态)性能指标(最大超调量、上升时间、峰值时间、调整时间);稳态(静态)性能指标(稳态误差);一阶、二阶系统的主要特征参量;欠阻尼、临界阻尼、过阻尼系统特点;主导极点。
2.重点掌握系统稳定性判别(Routh判据);稳态误差终值计算(包括三个稳态误差系数的计算);二阶系统动态性能指标计算。
自动控制原理复习提纲(版)PDF.pdf
关系。P155(背)
①要求系统稳定,则必须使所有的闭
环极点 si 均位于 s 平面的左半部。
②要求系统的快速性好,应使阶跃响 应式中每个分量衰减得快,则闭环极 点应远离虚轴。要求系统平稳性好, 则复数极点最好设置在 s 平面中与负
实轴成 45。夹角线附近。
③要求动态过程尽快消失,要求系数
6
21. 什 么 是 主 导 极
点,什么是偶极子
p155(背)
主导极点:离虚轴最 近且附近没有闭环 零点的一些闭环极 点(复数极点或实数 极点)对系统的动态 过程性能影响最大, 起着主要的决定的 作用的。 偶极子:将一对靠得 很近的闭环零、极点 称为偶极子 22.什么是最小相位 系统与非最小相位 系统 p162(背) 最小相位系统:系统 的所有开环极点和 零点都位于 s 平面的 左半部 非最小相位系统:s 平面的右半部具有 开环极点或零点的 系统 第五章: 23. 频 率 特 性 的 定 义:(背)线性定常 系统,在正弦信号作 用下,输出的稳态分 量与输入的复数比。 称为系统的频率特 性(即为幅相频率特 性,简称幅相特性)。 24.奈氏曲线 奈奎斯特图是对于一 个连续时间的线性非 时变系统,将其频率 响应的增益及相位以 极座标的方式绘出, 常在控制系统或信号 处理中使用,可以用 来判断一个有回授的 系统是否稳定。奈奎 斯特图上每一点都是 对应一特定频率下的 频率响应,该点相对 于原点的角度表示相 位,而和原点之间的 距离表示增益,因此
线性定常系统(或元件)的传递函数为在零初始条件下,系统(或元件)的输出变量拉氏变换与输入变量拉氏变 换之比。
这里的零初始条件包含两方面的意思,一是指输入作用是在 t=0 以后才加于系统,因此输入量及其各阶导数,在
《自动控制原理》考试大纲

(一)试卷满分为150分。
(二)内容比例控制系统的数学模型约30分反馈控制系统的性能指标约30分反馈控制系统的稳定性约25分根轨迹分析和设计系统的方法约20分频率响应约30分校正网络的设计约15分(三)题型比例计算题约占40%分析题约占60%第二部分考查的知识范围一、控制系统理论的基本概念控制系统是由各部件互联而形成的一个系统结构,并能够提供所期望的响应。
开环控制系统是利用调节装置直接控制过程;闭环控制系统是将系统的输出测量反馈并将该反馈信号与期望的输出进行比较的系统。
二、动态系统的数学模型(一)物理系统的数学模型、线性化、Laplace变换数学模型是分析和设计控制系统的基础。
由于所考察的系统在性质上是动态的,所以描述方程通常是微分方程。
如果能够线性化这些方程,那么就可以使用Laplace变换简化求解方法。
(二)线性系统的传递函数线性系统的传递函数定义为所有初始条件假定为零时的输出变量Laplace 变换与输入变量Laplace变换之比。
系统(或元件)的传递函数描述了所考虑系统的动态关系。
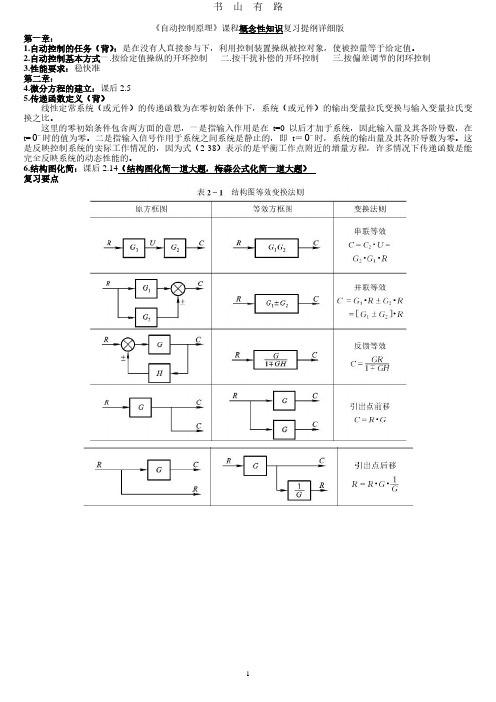
(三)方块图模型和信号流图模型方框图描述了系统变量之间的关系。
方框图由单向功能块组成,它表示变量间的传递函数。
信号流图是由节点和连接它们的若干有向支路组成的,它是一组线性关系的图解表示法。
可以采用MASON增益公式对获得系统的传递函数。
(四)状态变量、状态微分方程和状态流图模型系统状态是指表示系统的一组变量,若已知这组变量、输入信号和描述系统动态特性的方程,就可以完全确定系统未来的状态和输出响应。
状态微分方程将系统状态的变化率与系统状态和输入信号联系起来,线性系统的输出则通过输出方程把状态变量和输入信号联系起来。
状态流图可以采用相变量型状态流图和输入前馈形式型状态流图模型。
(五)状态转移矩阵和系统响应矩阵指数Φ(t) 称为为状态转移矩阵。
通过求得控制系统状态变量的时间响应可以检验系统的性能。
求解状态向量微分方程可得到系统的瞬态响应。
西北工业大学自动化学院考研复试大纲

九院硕士研究生录取综合考试大纲(共十四题,任选六题,每题15分,满分90分)一、自动控制原理(1)线性系统的时域分析法:明确系统稳定性的概念,掌握判定系统稳定性的方法。
明确系统性能的有关概念,掌握计算系统动态性能和稳态误差的有关方法;(2)线性系统的频域分析与校正:理解频率特性的含义;能熟练绘制开环系统的幅相频率特性和对数频率特性;掌握频域稳定判据;理解稳定裕度的意义,掌握其计算方法;理解三频段理论,掌握频域串联校正方法;二、测控技术(1)传感器的静动态特性;(2)常用非电量检测的基本原理;三、单片机原理(1)中断结构与中断流程;复习要点:a)中断源、中断优先权、中断响应流程;b)中断服务程序的结构;(2)单片机串行数据通信接口SCI;复习要点:a)串行数据通信接口的结构及串行数据通信的数据格式;b)串行数据通信工作模式与串行数据通信的波特率;主要参考书:1、孙涵芳徐爱卿.MCS51/96单片机原理及应用修订版北京:北京航空航天大学出版社2、李广弟等.单片机基础修订本北京:北京航空航天大学出版社3、牛小兵等.DSP控制器实用教程北京:国防工业出版社4、西北工业大学自动化学院DSP控制器原理四、计算机网络:局域网组网原理及TCP/IP网络协议;五、计算机控制基础(1)连续PID控制器的分析与设计;(2)离散型PID与增量PID的分析与设计;六、电气技术(1)掌握普通直流电机的分类及特点,能分析他励直流电机的调速方法和机械特性,搞清其起动、制动的基本方式及其优缺点;(2)掌握MOSFET和IGBT的应用特点,能分析三相全桥逆变器在120°或1 80°通电方式下阻性负载的相电压和线电压波形;七、交通运输及交通信息(1)交通规划理论:主要了解学生对交通方式划分预测、交通分配理论、交通网络设计理论、交通枢纽设计理论、交通规划方案评价方法等内容的掌握情况;(2)交通信息工程:主要了解学生对交通信息检测及分析所涉及的基础理论和专业方法的掌握情况。
西工大自动控制原理考试大纲
题号:977
《自动控制原理》
考试大纲
一、考试内容
要求学生能够熟悉控制系统的基本概念,熟悉控制系统如何建模、分析,如何用时域和频域方法设计和分析控制系统。
重点考察考生运用最常用的根轨迹法和波特图法设计、分析控制系统的能力。
1、掌握控制系统的基本概念;
2、熟悉动态系统的建模方法;
3、熟练掌握控制系统时域分析方法;
4、熟练掌握控制系统设计的根轨迹法;
5、熟悉控制系统频率响应分析方法;
6、熟练掌握控制系统频率域设计方法。
二、题型分布
1、概念题(15%);
2、方块图简化题(15%);
3、根轨迹绘制题(20%);
4、波特图绘制题(20%);
5、时域、频域分析设计题(30%)
三、主要参考书
1、《自动控制原理(第四版)》,胡寿松主编,国防工业出版社
2、《现代控制工程(第四版)》,电子工业出版社。
西北工业大学 硕士复试考试大纲904

题号904
动力专业综合考试大纲
考试内容:(以下3门任选2门)
1. 鱼雷活塞发动机主要参数分析、理论循环、实际过程、热力计算;鱼雷、发动机、推进器稳定工况配合特性;凸轮式活塞发动机动力学;周转斜盘活塞发动机动力学;转阀配气机构原理。
2. 鱼雷推进剂燃烧产物性能计算;供应系统与贮舱设计;燃烧室设计;挤代供应系统的性能与设计;泵供系统的性能与设计。
3. 热力学第一定律;理想气体性质、热力过程、混合物;热力学第二定律;气体的流动、动力循环;热力学普遍关系式;化学热力学基础。
参考书目:
1. 赵连峰编著,《鱼雷活塞发动机原理》,西北工业大学出版社,1991
2. 刘训谦编著,《鱼雷推进剂及供应系统》,西北工业大学出版社,1991
3. 冯青等编著,《工程热力学》,西北工业大学出版社,2006。
西北工业大学 自动控制原理考研真题

2013西工大821自动控制原理专业课回忆版共6道大题:1.常规时域题,利用程序框图,r(t),n(t),tr,等求三个未知数k1,k2,t2.常规根轨迹题目,用到D来求原式子,然后加入gc画出根轨迹图3.求稳态cst的,教案上习题应用,好像是分别求模值大小和角度即可4.常规pid校正,不过第二问让文字分析描述本题中的三频段5.常规题,第一问z变换就可以算出,第二问i型求误差6.常规利用na,gs求k和t,算出即可2012西北工业大学自动控制原理回忆版第一题:典型闭环系统加入了前馈控制并且含有未知数t,典型闭环控制开环增益k未知。
(1)当未知数t k为何值是系统等幅震荡(2)当系统为一阶无差系统求满足的t k(3)利用闭环主导极点化简系统方程求超调量和调节时间第二题:直接给出特征方程:三次,含有未知数k t(1)系统有三重负实根确定k t(2)利用求出来的t确定k从0——无穷的根轨迹(参数根轨迹)其中求出渐近线,和分离点第三题:系统两个转接频率2和18中间斜率为—20且高频延长线交为12,初始相角和末都是—180第一问画出概略对数幅频曲线。
第二问确定开环传函第三问是求截止频率和相角裕度第四问忘了第四题:不是典型的校正题没做出来其中给出了校正图G1(S)未知知和G(S)=1除(S+1)串联.让确定函数其中要求在n(t)干扰下的误差为0和kv为12还有就是保持截止频率而增大相角裕度为40但是根据G(s)我不知怎么求截止频率第五题:常规题但是其中有利用到差分方程求误差第六题:典型的1+N(a)G(s)=0不过N(a)是含有虚部的那个4mpeih那个求自震频率和幅值和K变化时对两者影响2014年西工大821自动控制原理考研真题回忆版第一题,三问,1,求K的范围2,好像求误差3.求前馈校正的Gc.第二题,大家都知道是根轨迹的,不过这次好像很多问,对我个人能力来说,比往年难多了,根轨迹要做了前两问才可以开始画,求渐近线,出始角,和虚轴交点。
西北工业大学本科自动控制原理期末试题(三)参考答案

=
0.632
五. (共 15 分) 解 (1) (3 分)
G0 ( s ) = 100 s s s + 1 + 1 10 100
(2) (9 分)
s 100 + 1 3 G ( s ) = Gc ( s )G0 ( s ) = , L(ω ) 见下图。 2 s s s + 1 + 1 0.3 100
D( z ) = ( z − 1)( z − e −T ) + KTz = z 2 − (1 + e −T − KT ) z + e −T =0
D(1) = KT > 0 −T D(−1) = 2(1 + e ) − KT > 0 e −T < 1
K >0 2(1 + e −T ) K < T
2005 年第二学期
自动控制原理 (教改班 64 学时) 课程考试考题答案及评分标准(A 卷)
一.单选题( 单选题(每小题 2 分,共 20 分) (1)D; (6)A; (2)C; (3)B; (4)A; (9)A; (5)D; (10)B;
(7)D ; (8)C;
二. (共 20 分) 解
K 2 2 ωn C ( s) K s (1) (4 分) Φ( s ) = = = 2 = 2 2 Kβ K R(s) s + K β s + K s + 2ξω n s + ω n 1+ + 2 s s
ω = 3 K * = 54
4 <K <6 9
4 < K
*
< 54
) (3 分)依根轨迹, < K < 6 时, K ↑ ⇒ t s ↑ 9 e ↓
西工大2013-2015年946(自动控制原理)专业综合考试大纲

自动化学院硕士研究生录取综合考试大纲 包括各学科必选题目在内,每位考生共需做90分值题目一(10分)(报考机械电子工程学科必选)流体力学基本概念,包括流体静力学、流体动力学。
参考书目:陈卓如等编.《工程流体力学》.高等教育出版社.二(20分)(报考机械电子工程、测试计量技术及仪器、仪器仪表工程、检测技术与自动化装置、精密仪器及机械学科必选)1、传感器的静动态特性、常用传感器的基本工作原理与测量电路。
2、常用非电量(常用工业量)检测的基本原理。
参考书目:(1) 郁有文等编著.《传感器原理及工程应用》(第三版).西安电子科技大学出版社.(2) 徐科军等编著.《传感器与检测技术》.电子工业出版社.(3) 陈明.《传感器原理与检测技术》.西北工业大学出版社.三(20分)(报考网络与信息安全、仪器仪表工程、检测技术与自动化装置、电力电子与电力传动、系统工程、电力系统及其自动化学科必选;报考电气工程必选10分)1、微机原理:计算机基础;中断的基本概念;输入输出接口电路。
2、单片机原理及其接口技术。
(1) 中断结构与中断流程。
复习要点:a) CPU对中断的处理流程,中断标志寄存器IFR、中断允许寄存器IER和中断屏蔽位INTM的作用;b) 编写中断服务程序ISR时应遵循的原则;(2) 异步串行数据通信。
复习要点:a) 异步串行数据通信的数据帧格式;b) 起始位的作用,收发双方波特率差异的允许范围。
3、常用计算机及外设接口总线基本概念及构成。
参考书目:(1) 牛小兵,许爱德,王丹.《DSP控制器实用教程》.北京:国防工业出版社.2007.(2) 谢拴勤主编.《DSP控制器原理》.电子工业出版社出版.2008.四(10分)(报考测试计量技术及仪器、模式识别与智能系统、精密仪器及机械学科必选)1、快速傅里叶变换(FFT):明确基2 DIT—FFT算法及基2 DIF—FFT算法思想、运算量及特点,掌握分解流图绘制。
2、无限冲击响应(IIR)数字滤波器设计:明确模拟滤波器的设计及双线性变换法的原理,掌握基于双线性变换的IIR数字滤波器设计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动化学院硕士研究生录取综合考试大纲 包括各学科必选题目在内,每位考生共需做90分值题目
一(10分)(报考机械电子工程学科必选)
流体力学基本概念,包括流体静力学、流体动力学。
参考书目:
陈卓如等编.《工程流体力学》.高等教育出版社.
二(20分)(报考机械电子工程、测试计量技术及仪器、仪器仪表工程、检测技术与自动化装置、精密仪器及机械学科必选)
1、传感器的静动态特性、常用传感器的基本工作原理与测量电路。
2、常用非电量(常用工业量)检测的基本原理。
参考书目:
(1) 郁有文等编著.《传感器原理及工程应用》(第三版).西安电子科技大学出版社.
(2) 徐科军等编著.《传感器与检测技术》.电子工业出版社.
(3) 陈明.《传感器原理与检测技术》.西北工业大学出版社.
三(20分)(报考网络与信息安全、仪器仪表工程、检测技术与自动化装置、电力电子与电力传动、系统工程、电力系统及其自动化学科必选;报考电气工程必选10分)
1、微机原理:计算机基础;中断的基本概念;输入输出接口电路。
2、单片机原理及其接口技术。
(1) 中断结构与中断流程。
复习要点:a) CPU对中断的处理流程,中断标志寄存器IFR、中断允许寄存器IER和中断屏蔽位INTM的作用;b) 编写中断服务程序ISR时应遵循的原则;
(2) 异步串行数据通信。
复习要点:a) 异步串行数据通信的数据帧格式;b) 起始位的作用,收发双方波特率差异的允许范围。
3、常用计算机及外设接口总线基本概念及构成。
参考书目:
(1) 牛小兵,许爱德,王丹.《DSP控制器实用教程》.北京:国防工业出版社.2007.
(2) 谢拴勤主编.《DSP控制器原理》.电子工业出版社出版.2008.
四(10分)(报考测试计量技术及仪器、模式识别与智能系统、精密仪器及机械学科必选)
1、快速傅里叶变换(FFT):明确基2 DIT—FFT算法及基2 DIF—FFT算法思想、运算量及特点,掌握分解流图绘制。
2、无限冲击响应(IIR)数字滤波器设计:明确模拟滤波器的设计及双线性变换法的原理,掌握基于双线性变换的IIR数字滤波器设计。
参考书目:
高西全,丁玉美.《数字信号处理》.西安电子科技大学出版社.2008.
五(20分)(报考控制理论与控制工程、控制工程、模式识别与智能系统学科必选;报考系统工程必选10分)
1、贝叶斯决策理论、参数估计与非参数估计、判别函数与分类器设计、特征的选择与提取、聚类分析。
2、最小二乘估计法的问题描述、优化指标和计算公式。
3、Kalman滤波器的问题描述、优化指标和正交原理。
参考书目:
(1) 潘泉,程咏梅,梁彦,杨峰,王小旭.《多源信息融合理论及应用》第二章“估计理
论”.清华大学出版社.2012.
(2) 梁彦,潘泉,杨峰,张磊.《复杂系统的现代估计理论与应用》第二章“概率统计及
随机过程基础知识”.科学出版社.2009.
(3) 张学工编著.《模式识别》.清华大学出版社.2010.
(4) 汪增福编著.《模式识别》.中国科学技术大学出版社.2010.
六(20分)(报考控制理论与控制工程、控制工程、机械电子工程、测试计量技术及仪器、模式识别与智能系统、仪器仪表工程、检测技术与自动化装置、精密仪器及机械、导航制导与控制、交通运输工程类必选;报考系统工程学科必选1 0分)
1、自控原理基本概念。
(1)线性系统的时域分析与校正:明确系统稳定性的概念,掌握判定系统稳定性的方法。
明确系统性能的有关概念,掌握计算系统动态性能和稳态误差的有关方法。
掌握时域校正方法。
(2)线性系统的频域分析与校正:理解频率特性的含义;能熟练绘制系统的开环
幅相频率特性和对数频率特性;掌握频域稳定判据;理解稳定裕度的意义,掌握其计算方法;理解三频段理论,掌握频域串联校正方法。
2、可靠性基本概念。
参考书目:
胡寿松.《自动控制原理》.国防工业出版社.
七(20分)(报考电气工程、电机与电器、电力电子与电力传动、电力系统及其自动化学科必选)
1、电机知识。
主要包括直流电机、变压器、异步电机和同步电机的工作原理和主要特性。
2、电机调速与拖动。
包括工作原理、控制方法和特性分析,现代交直流电机控制方法与驱动技术。
3、电力电子技术。
包括电力电子器件功能、特性,基本变换拓扑及其应用技术。
参考书目:
(1) 刘景林主编.《电机及拖动基础》.化学工业出版社.2011.
(2) 王兆安,黄俊.《电力电子技术》.北京:机械工业出版社.2001.
八(20分)(报考电气工程、电机与电器、电力电子与电力传动、电力系统及其自动化学科必选)
航空航天器供电系统:飞机供电体制,飞机直流起动/发电原理、自动配电系统原理与结构。
参考书目:
(1) 张晓斌主编.《电气测试原理与方法》.西北工业大学出版社出版.2007.
(2) 沈颂华主编.《航空航天器供电系统》.北京航空航天大学出版社.2007.
九(20分)(报考系统工程学科必选)
1、系统工程的基本工作过程。
2、系统分析原理。
3、系统模型与模型化。
4、系统动力学结构模型化原理。
5、系统的评价方法。
6、决策分析方法。
参考书目:
汪应洛.《系统工程》.机械工业出版社.2011.
十(20分)(报考导航制导与控制学科必选)
1、飞行器结构与布局、飞行力学基本知识。
2、飞行器坐标系、纵向和横侧向运动方程。
3、长周期和短周期模态的基本特性,掌握飞行器纵向和横侧向的传递函数及其特点。
4、飞行控制系统设计问题,包括增稳系统、姿态稳定系统、高度控制系统的控制律设计;协调转弯控制的基本原理。
参考书目:
吴森堂,费玉华.《飞行控制系统》.北京航空航天大学出版社.2009.
十一(20分)(报考网络与信息安全学科必选)
1、密码学的基本概念。
2、分组密码中DES、IDEA、NSSD算法。
3、公钥密码体制中,背包公钥密码、RSA、拉宾算法和基本的数论知识。
4、利用线性反馈移位寄存器的密码反馈原理。
5、数字签名、Hash函数、安全协议。
参考书目:
(1) 卢开澄.《密码学》.清华大学出版社.1999.
(2) 朱文余,孙琦.《计算机密码应用基础》.科学出版社.2000.
(3) 周明天.《TCP/IP网络原理与技术》.清华大学出版社.2001.
十二(30分)(报考交通运输工程类学科必选)
1、(15分)“交通工程学”应掌握:交通特性,交通调查,道路交通流理论,道路通行能力、交通安全、城市道路交通管理、停车场的规划与设计和道路交通与环境保护等方面基本理论和方法。
2、(15分)“交通规划原理”应掌握:交通与土地利用、交通网络布局规划与设计、交通的发生与吸引、交通的分布、交通方式划分、交通流分配、交通需求量预测模型等内容。
参考书目:
(1) 王炜.《交通工程学》.东南大学出版社.2011.
(2) 邵春福.《交通规划原理》.中国铁道出版社.2004.。