航海学(一)复习要点
航海学笔记完整
第一章 基础知识第一节 地球形状,地理坐标和大地坐标系描述地球形状不属于地球的任何模型大地球体:由大地水准面所包围的几何体。
使用地球椭圆体为地球数学模型的场合:定义地理坐标时 制作摩卡托投影海图时使用地球圆球体为地球数学模型的场合:计算大圆航线时 制作简易摩卡托图网时1海里=1852 m.所谓“地埋纬度”是指:某点在地球椭圆子午线上的法线与赤道面的交角纬度: lat.,ϕ 经度:Long.,λ算经纬差:终点见减起点经差、纬差的定义、方向性及计算●12ϕϕψ-=D ︒<<︒1800ϕD ︒<<︒900ϕ ● 12λλλ-=D ︒<<︒1800λD ︒<<︒1800λ纬差,经差为正值,分别表示北纬差和东经差。
负值表示南纬差和西经差。
GPS 大地坐标系采用WGS-85WGS-84大地坐标系就是欧洲1950大地坐标系。
方向的确定和划分:在测者地面真地平上确定方向,南北线为测者真地平与测者子午圈平面的交线;东西线为测者真地平与测者卯酉圈平面的交线。
方向划分方法有三种:圆周法 半圆周法 罗经点法。
圆周法的表示,不管百位有没有,必须要有数字,哪怕是O !!!半圆周法:读法与写法的顺序完全一样。
罗经点法(重点):基点 ±45°=偶点 ±22.5°=三字点 ±11.25°=偏点关于偶点:读法依然按照习惯,写法相反。
45°东北NE 135°东南SE 225°西南 SW 315° 西北NW关于三字点:读法与写法完全一致,4个区间每个区间2个(在偶点的前面加一个,偏向哪一方加上一个字母)北北东(NNE ) 东北东(ENE ) 东南东(ESE ) 南南东(SSE )等关于偏点:4个区间每个区间4个。
一个罗经点=11.25°偶数的读法只限于在基点和偶点基础上,偏向那一方后面加 /四个基点之一。
航海学-第一章_航海基础知识

其短轴旋转形成 的几何体。
《航海学》第一章
地球椭圆体图
概念:由椭圆绕
其短轴旋转形成 的几何体。
《航海学》第一章
地球椭圆体图
概念:由椭圆绕
其短轴旋转形成 的几何体。
《航海学》第一章
地球椭圆体图
概念:由椭圆绕
其短轴旋转形成 的几何体。
《航海学》第一章
地球椭圆体图
概念:由椭圆绕
A Q
G O
W
M A' Q'
E
PS
《航海学》第一章
地理纬度
概念
PN
某点的地理 纬度是指地球椭
A G
圆子午线上该点
的法线与赤道面 Q
O
的夹角。
W
A' M
Q'
E
PS
《航海学》第一章
地理纬度
PN
概念
A
代号:
“”或“Lat”。Q
G O
W
A' M
Q'
E
PS
《航海学》第一章
地理纬度
概念 代号
二、地理坐标
地轴:过南北(N、
PN
S)两极的轴线
Q
O
Q'
PS
《航海学》第一章
二、地理坐标
地轴
PN
地 极 : PN 为 北 极、PS为南极
子午圈:过短 轴 的 子 午 圈 平Q
O
Q'
面与地球椭圆
体表面相交的
椭圆截痕
《航海学》第一章
PS
二、地理坐标
PN
地轴
地极
子午圈
子午线/ 经线:Q
甲类船长航海学知识点(1)

观测天体最佳高度:15-70蒙气差:天体高度15度时:0.2’天体高度30度时:0.1’两物标定位选用近距离的物标,30-150,两天体定位夹角:仅系统误差:0最好,180最差.(ε/cos(θ2))仅随机误差:90最好单物标移线定位:船位线交角:30-60太阳变化:30-50间隔时间:1-2H主要误差:船位线夹角、两次船位线间推算船程误差三角形合理长度:5MM可用恒向线代替恒位线距离:<30NM三天体定位_____________系统误差3个许相等:<180,旁心>180,内心最概率:三条方位线:平均方位线、同时增加或减距离、方位(不是天体方位)随机误差:1.各边比例中心,靠近长边大角2.反中线的交点大船沿岸航线:20M或2倍吃水以外小船沿岸航线:10M或2倍吃水以外没有夜航灯标船测沿岸:10NM能见度良好陡峭沿岸:2NM能见度良好有避险标沿岸:1NM珊瑚礁通过位置及方法:背阳、上风、微风、太阳高度高无线电信号表:第二卷:无线电信号雷达航标和各种定位系统第六卷:VTS报告程序沿岸航行:大船:>20米小船:>10米或2D较大者夜间无灯标:10NM良见度良好距海岸线:2NM能见度良好有显著物标:1NM任何情况下最少:1NM确定最小安全水深不考虑:潮高、海图水深、航道变迁保留水深关系:潮高预报误差、底质、海图水深误差避险物与危险物的连线与计划航线垂直:同侧:距离避险异侧:平行线避险冰区航行:维持舵效的最小速度、3-5节危险货物报告:200NM 内散失危险货物的报告中国船舶报告系统:进入前24小时或进入后2H 内 离开中国港口前2H离开界限前后2H 内:最终报告随机误差:1:68.3%2:95.4%3:99.7%误差椭圆:1:39.4%2:86.5%3:98.9%误差圆: 1:68.3-63.2%(a=b 时:63.2%;a=0或b=0时,68.3%) 夹角小、两位置线误差大:四边形方位定位误差:距离定位误差:三角形随机误差:之内,短边大角…………系统……….: >180内心,<180旁心单一方位距离定位最精确:六分仪+罗经定位最准的: 两对物标串视定位截距>0,即Dh>0, 朝向天体画船位线,测者在天文圆之外误差e>0,天体反方向天文船位计算时偏离不超过: 30NM中天船位: 太阳高度与顶距名称相反ψ=Z+δ (Z :顶距,δ赤纬,同名相加异名相减,方向取大者) 太阳真高度:-6: 民用(民用晨昏蒙影:太阳视出没与-6间)-12: 航海用(航海晨昏蒙影:-6~-12)-18: 天文用(天文晨昏蒙影:-12~-18)测星定位最好时机: -3~-9(民用晨光始或昏影终)高度差法需修正: 高纬、高度高、东西向误差四边形:非等概率,小角度……..圆: 非等概率,作圆方便……..椭圆: 等概率,能反映方向两天体定位:∆A< 90°:船位系统误差的方向与随机误差的方向垂直A> 90°:船位系统误差的方向与随机误差的方向一致GPS无星历数据时定位:30MIN…….有…………………………:5MINGPS数据更新时间:2SECDIS断电后能自动重启时间:45S测深仪误差:深水:5M浅水:0.5M光栅海图与矢量海图精度:相同ENC必须采用WGS-84坐标系、默认安全等深线:30M改变SENC的更新称为:综合更新不改变………………………:非综合更新航线监控:XTD、转向角度、转回半径主显示设备:270*270备用………….:250*250ECDIS取代低质海图的条件:有备份配置THD误差:随动误差:0.5静态误差: 1.0动态误差: 1.5广泛:0.5英版海图共有光盘:11张海图显示需时:5SECS:非官方ECDIS:官方MSC 232: 性能标准IHO S-52: 显示规范(颜色与符号)IHO S-57:数据交换与传输IHO S-61: 光栅海图产品规范IHO S-63: 数据保护IEC 61174:性能测试二显三保四测七传输ECDIS必须连接:GPS、THD、SDMS(速度、距离)特征对象不包括:矩阵对象、矢量对象标准显示包括基础显示,基础显示是最少的基础显示(不可移除)→标准显示→所有其它显示紫色标:危险红色标:安全危险信息:红色安全信息:黄色斜体:精确高直体:精确低比例尺棒:1NM比例尺:10NM本船以比例船型显示:>6MM时ECDIS检测浅水区,不是浅水等深线ECDIS航迹保存:3个月ECDIS航行记录保存:12H……………………….自动保存:1MINBNWAS:(3-12MIN)→视觉(15S)→一级声响(15S)→二级(90S)→三级VDR:备用电源:24H记录:12H电磁计称仪是相对于水的相对计称仪是相对于水的可以测前进后退又可以测横向速度的计称仪:多普勒、声相关计称仪声相关计称仪V与s(前后换能器距离)成正比、与r(信号延迟)成反比既可以测航速、航程和水深的计程仪为声相关计程仪1371.在误差三角形较大时,经反复观测方位定位,始终存在大小和形状变化不定的船位误差三角形,则存在。
航海学一复习总结版分解
航海学一复习总结版第一篇基础知识第一章坐标、方向和距离1) 名词解释:①经度:基准经线与某点经线在赤道上夹的小于180°的弧,或该弧所对的球心角称为该点的地理经度,简称经度。
②纬度:地球椭圆体子午线上某点的法线与赤道平面之间的夹角,称为该点的地理纬度。
经差:两地之间经度的代数差。
纬差:两地之间纬度的代数差③磁差:由于磁北极和地理北极不重合,使得真北与磁北之间有一交角称为磁差.④自差:在地磁力和船磁力的共同作用下,使罗经卡的0°不再指向磁北,而指向它们的合力方向,这个方向称为罗经北,用N C表示。
罗北与磁北的交角称为自差,用Dev 表示。
⑤罗经差:罗北与真北之间的夹角称为罗经差,用ΔC表示。
⑥陀罗经差:真北与陀罗北之间的夹角称为陀罗经差,用ΔG表示。
⑦真方位:真北线与物标方位线之间的夹角称为该物标的真方位。
以真北为0°,顺时针000°~360°范围度量到方位线,用TB表示。
⑧磁方位:以磁北为基准的物标方位。
⑨罗方位:陀螺罗经测得的方位同陀螺方位。
⑩真航向:真北线与航向线之间的夹角称为真航向。
以真北为0°,顺时针000°~360°范围度量到航向线,用TC表示。
11 磁航向:以磁北为基准的航向罗航向:以罗北或陀罗北为基准测得的航向同陀螺航向:舷角:航向线与物标方位线之间的夹角称为该物标的舷角。
用“Q”表示。
12 物标左正横:当物标舷角为270°或90°左时,叫作物标左正横。
13 物标右正横:当物标舷角为90°或90°右时,叫作物标右正横;。
14 海里:地球椭圆体子午线上纬度1分对应的弧长称为一海里15 灯光初显:晴天黑夜,当船舶驶向强光灯塔时,测者看到灯塔灯芯刚刚露出水天线的瞬间,称为灯光初显。
2) 地理坐标系采用的基本大圆(地理坐标系是建立在地球椭圆体上的坐标系)地轴和地极赤道纬度圈子午圈和经度线基准经线(格林子午线)3) 经差、纬差计算和命名方法1.经差(difference of longitude,):两地之间经度的代数差;计算公式:注意:1)运算中东经为“+”,西经为“—”。
航海学知识点汇总
航海学知识点汇总航海,是人类探索和征服海洋的历史悠久和辉煌壮丽的篇章,也是人类社会发展史上重要的一页。
航海是指运用船舶等水上交通工具,在海上或者其他水域中进行商业、旅游、科考等活动。
对于航海爱好者来说,了解一些航海学的基本知识是非常重要的。
下面就为大家介绍一些航海学的知识点,让大家更加深入地了解航海学的世界。
一、船舶构造和稳性1、船舶的构造:船身由两部分组成,即上部建筑和船体(即船壳)。
船体包括船头、船底和船侧。
船舶的推进力是由发动机驱动螺旋桨产生的,螺旋桨和推进装置一般安装在船尾。
船舶的掌舵则是通过舵机等机械装置进行的。
2、船舶的稳性:船舶的稳性是指船舶在不同浮动状态下的稳定性能。
稳定性是指船舶在受到外力作用时,能保持稳定的能力。
船舶的稳定性可以通过以下几种参数来衡量:重心高度、艏甲板高度、纵倾周期、横倾周期、稳性保证系数等。
二、导航术中的基本概念1、导航物:导航物是指能够用来导航的信标、灯塔、岛屿、海岸线等。
导航物可以区分无特征和有特征的导航物,无特征的导航物是常见的灯塔或水手以及遥测设备等,而有特征的导航物则是特殊的地貌或者标志,通常用来标记海域的危险区域或边界。
2、航向:航向是指船舶航行时相对于地球表面的方向,以正北方向为基准。
航向可以通过舰桥的船首向标、罗盘读数等方式得到。
3、航迹:航迹是指船舶航行过程中的实际轨迹。
航迹可以通过航线等方式得到。
4、船速:船速是指船舶在航行过程中的速度,可以通过船速表等仪器得到。
三、海洋气象1、气压系统:气压系统是导致气象变化的重要因素,通常由高压系统、低压系统和锋面构成。
高压系统通常代表干燥、晴朗和温暖的气候,而低压系统则代表雨、雪、风暴等天气。
锋面则代表了气压的变化区。
2、风向和风速:风向和风速是指风的方向和力度。
风一般会影响海洋的浪高、波向和潮汐。
风向和风速可以通过气象图、风速仪等形式得到。
3、浪高和周期:浪高和周期是指海浪高度和波动周期,通常由风速、浪向、水深等因素影响。
航海学一复习总结版

航海学一复习总结版第一篇基础知识第一章坐标、方向和距离1) 名词解释:①经度:基准经线与某点经线在赤道上夹的小于180°的弧,或该弧所对的球心角称为该点的地理经度,简称经度。
②纬度:地球椭圆体子午线上某点的法线与赤道平面之间的夹角,称为该点的地理纬度。
经差:两地之间经度的代数差。
纬差:两地之间纬度的代数差③磁差:由于磁北极和地理北极不重合,使得真北与磁北之间有一交角称为磁差.④自差:在地磁力和船磁力的共同作用下,使罗经卡的0°不再指向磁北,而指向它们的合力方向,这个方向称为罗经北,用N C表示。
罗北与磁北的交角称为自差,用Dev 表示。
⑤罗经差:罗北与真北之间的夹角称为罗经差,用ΔC表示。
⑥陀罗经差:真北与陀罗北之间的夹角称为陀罗经差,用ΔG表示。
⑦真方位:真北线与物标方位线之间的夹角称为该物标的真方位。
以真北为0°,顺时针000°~360°范围度量到方位线,用TB表示。
⑧磁方位:以磁北为基准的物标方位。
⑨罗方位:陀螺罗经测得的方位同陀螺方位。
⑩真航向:真北线与航向线之间的夹角称为真航向。
以真北为0°,顺时针000°~360°范围度量到航向线,用TC表示。
11 磁航向:以磁北为基准的航向罗航向:以罗北或陀罗北为基准测得的航向同陀螺航向:舷角:航向线与物标方位线之间的夹角称为该物标的舷角。
用“Q”表示。
12 物标左正横:当物标舷角为270°或90°左时,叫作物标左正横。
13 物标右正横:当物标舷角为90°或90°右时,叫作物标右正横;。
14 海里:地球椭圆体子午线上纬度1分对应的弧长称为一海里15 灯光初显:晴天黑夜,当船舶驶向强光灯塔时,测者看到灯塔灯芯刚刚露出水天线的瞬间,称为灯光初显。
2) 地理坐标系采用的基本大圆(地理坐标系是建立在地球椭圆体上的坐标系)地轴和地极赤道纬度圈子午圈和经度线基准经线(格林子午线)3) 经差、纬差计算和命名方法1.经差(difference of longitude,):两地之间经度的代数差;计算公式:注意:1)运算中东经为“+”,西经为“—”。
航海学(一)复习要点
第一篇基础知识第一章坐标、方向和距离1.名词解释:经度、纬度、经差、纬差、磁差、自差、罗经差、陀罗经差、真方位、磁方位、罗方位、陀螺方位、真航向、磁航向、罗航向、陀螺航向、舷角、海里、灯光初显2.地理坐标系采用的基本大圆(地理坐标系是建立在地球椭圆体上的坐标系3.经差、纬差计算和命名方法4.表示地球椭圆体形状和大小的参数有哪一些5.航海中为了简化计算对地球的形状采用圆球体、精确计算时采用椭圆体。
6.航海中目前使用的划分方向的方法有哪一些7.圆周法、半圆法、罗经点法换算8.磁差变化与哪一些因素有关9.自差变化与哪一些因素有关10.磁差资料的查取11.向位换算12.1海里的长度计算公式13.求地理能见距和初现距离14.中、英版图注射程15.求计程仪航程、计程仪改正率和到达点计程仪读数的计算16.相对计程仪“计风不计流”的概念17.航速校验线必备的条件18.不同水流条件下测定船速和计程仪改正率的方法第二章海图1.名词解释:恒向线、纬度渐长率、基准比例尺2.墨卡托海图采用的投影方法3.墨卡托海图的特点4.大圆海图的特点和投影方法5.重要海图图式6.中、英版海图上山高、灯高、比高、净空高度、水深采用的基本面7.英版海图上PA、PD、ED的含义8.如何判定海图的可靠程度第二篇船舶定位第一章航迹绘算1.名词解释:东西距2.风压差的大小与哪一些因素有关3.风压差确定正负号的方法4.风压差计算公式5.压差角的测定(重点是最小距离方位和正横方位法)6.中分纬度航法的计算7.海图作业试行规则中对航迹推算的规定(连续不间断,只有通过狭水道、渔区可中断。
水流显著的海区一小时一个船位,其他海区2-4小时一个船位8.无风流情况下,推算船位的误差产生的原因有哪一些?正常情况下,航向误差和航程误差各为多少?概率园的半径是多少?第二章陆标定位1.名词解释:船位差2.航海中常用的船位线有哪几种3.说出3种距离定位时判定双值性的方法4.距离定位时观测物标的顺序5.方位定位时观测物标的顺序和选择物标的原则6.三标方位定位时产生误差三角形的原因及处理方法7.倍角法、四点方位法、特殊角法定位的条件8.方位移线定位注意事项第三篇航行方法第一章大洋航行1.航线有哪几种类型2.大圆航线分段的原则3.选择大圆航线时应避开哪一些航行受限制的区域4.选择大圆航线时应考虑哪一些因素5.空白定位图有哪一些特点第二章沿岸航行1. 选择沿岸航线时应考虑哪一些因素2. 选择沿岸航线时,确定航线离岸距离时应考虑哪一些因素(一般数据)3.选择沿岸航线时,确定航线离危险物距离时应考虑哪一些因素第三章狭水道航行1.确定富裕水深大小时应考虑哪一些因素2.通过浅滩的有利时机高潮前一小时3.判定前方浮标是否有碰撞危险的方法4. 狭水道航行可以采用的导航方法、转向方法、避险方法有哪一些5.试述白天判定浅水礁盘存在的方法6. 试述平行方位转向法7.利用叠标导航修正航向的方法8.利用导标导航修正航向的方法第四章特殊条件下的航行1.雾中航行逐点航法的优缺点2. 雾中航行注意事项3.冰区航行注意事项4.利用雾号回声判定船与海岸距离的方法。
航海学知识点汇总

航海学知识点汇总第一章航海学基础知识1.大地球体:大地水准面围成的球体2.大地球体两个近似体:椭圆体(进行精度较高计算如定义地理坐标和制作墨卡托海图);圆球体(简易计算如大圆航线和简易墨卡托海图)3.地理坐标:基准线是格林经线、纬线经度:由格林经线向东或向西到该点经线,范围(0—180);纬度:某点在地球椭圆子午线上的法线与赤道面交角,范围(0—90)4.经差、纬差(范围都为0—180);到达点相对于起航点的方向;Dφ=φ2-φ1 Dλ=λ2-λ1N/E为正号S/W取负号;结果为正为N/E,为负则为S/W;注意如果得出经差大于180,则用360减去其绝对值,然后符号更换。
5.关于赤道、地轴和球心对称问题(关于地心对称纬度等值反向,经度相差180°)6.关于不同坐标系修正问题:同名相加、异名相减,结果如果为负名称与原来相反。
GPS坐标系左边原点在地心。
7.方向的确定:方向是在测者地面真地平平面上确定的。
测者子午圈与测者地面真地平的交线为南北线,测者卯酉圈(东西圈)与测者地面真地平平面交线为东西线。
方向的三种表示法,要会换算。
(圆周、半圆周、罗经点)一个罗经点11.25°。
圆周法是以真北为起点顺时针0-360°,半圆法是以北或南为起点顺时针或逆时针0-180°;换算时最好用作图法比较直观。
8.理解真航向(真北到航向线);真方位(真北到方位线);舷角(航向线到方位线,两种表示法)所以真方位和相对方位(舷角)只是起算点不同,目的点相同,只是相差了真北到航向线的角度,即真航向。
要会换算:TB=TC+Q 或TB=TC+Q(右正左负),具体计算既可以用公式也可以用作图法解决(分别以测者和目标为中心做坐标系,连接测者与目标为方位线,便可一目了然。
9.罗经向位换算:罗经差:罗航向与真北夹角;陀螺差:陀螺北与真北夹角;磁差:磁北与真北夹角,与时间、地区及地磁异常有关;自差:罗北与磁北夹角,与航向、船磁及磁暴有关;TC/GC/MC/CC之间换算要掌握TC=GC+ΔG=CC+ΔC=MC+VAR;MC=CC+DEV 10.关于磁差:航用海图、小比例尺海图、港泊图分别在罗经花、磁差曲线、和海图标题栏给出。
(完整版)航海学知识点
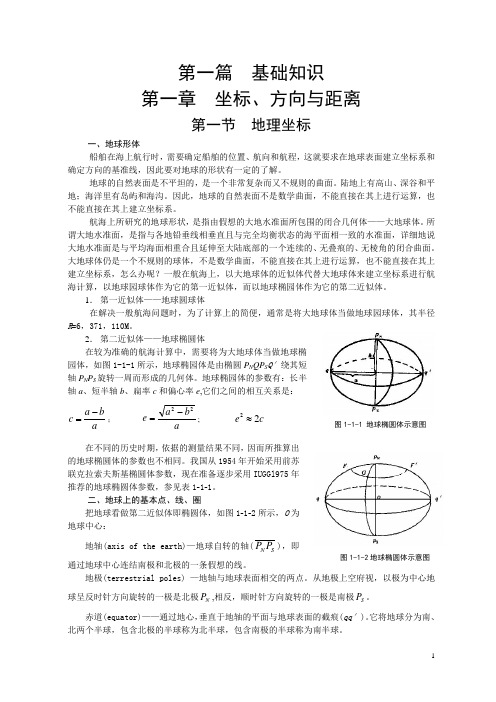
(完整版)航海学知识点第⼀篇航海学(地⽂航海)第⼀章坐标、⽅向和距离第⼀节地球形状和地理坐标⼀、地球形状1. 第⼀近似体――地球圆球体航海上为了计算上的简便,在精度要求不⾼的情况下,通常将⼤地球体当作地球圆球体。
2. 第⼆近似体――地球椭圆体在⼤地测量学、海图学和需要较为准确的航海计算中,常将⼤地球体当作两极略扁的地球椭圆体。
地球椭圆体即旋转椭圆体,它是由椭圆P N QP S Q′绕其短轴P N P S旋转⽽成的⼏何体(图1-1)。
表⽰地球椭圆体的参数有:长半轴a、短半轴b、扁率c和偏⼼率e。
⼆、地理坐标1. 地球上的基本点、线、圈地理坐标是建⽴在地球椭圆体表⾯上的。
要建⽴地理坐标,⾸先应在地球椭圆体表⾯上确定坐标的起算点和坐标线图⽹。
如图所⽰:椭圆短轴即地球的⾃转轴――地轴(P N P S);地轴与地表⾯的两个交点是地极,在北半球的称为北极(P N),在南半球的称为南极(P S);通过地球球⼼且与地轴垂直的平⾯称为⾚道平⾯,⾚道平⾯与地表⾯相交的截痕称为⾚道(QQ′),它将地球分为南、北两个半球;任何⼀个与⾚道⾯平⾏的平⾯称为纬度圈平⾯,它与地表⾯相交的截痕是个⼩圆,称为纬度圈(AA′);通过地轴的任何⼀个平⾯是⼦午圈平⾯,它与地表⾯相交的截痕是个椭圆,称为⼦午圈(P N QP S Q′);由北半球到南半球的半个⼦午圈,叫作⼦午线,⼜称经线(P N QP S,P N Q′P S);通过英国伦敦格林尼治天⽂台⼦午仪的⼦午线,叫作格林⼦午线或格林经线(P N GP S)。
2. 地理坐标地球表⾯任何⼀点的位置,可以⽤地理坐标,即地理经度和地理纬度来表⽰。
地理经度简称经度,地⾯上某点的地理经度为格林经线与该点⼦午线在⾚道上所夹的劣弧长,⽤λ或Long表⽰。
某Array点地理经度的度量⽅法为:⾃格林⼦午线起算,向东或向西度量到该点⼦午线,由0°到180°计量。
向东度量的称为东经,⽤E标⽰;向西度量的称为西经,⽤W标⽰。
航海学知识点汇总

航海学知识点汇总一、航海基础知识1、地球形状和地理坐标11 地球的形状和大小12 地理坐标的概念和表示方法13 经纬度的度量和换算2、航向和方位21 航向的定义和表示22 方位的概念和种类(真方位、磁方位、罗方位)23 航向和方位的换算关系3、海图31 海图的种类和用途32 海图比例尺和投影方式33 海图上的符号和注记4、航海仪器41 罗盘(磁罗经和电罗经)42 测深仪43 计程仪44 定位系统(GPS、北斗等)二、航海气象1、气象要素11 气温和气压12 风13 湿度和能见度14 云2、天气系统21 气旋和反气旋22 锋面23 台风(飓风)3、海洋气象预报31 预报的来源和获取途径32 预报内容的解读和应用三、船舶运动性能1、船舶浮性和稳性11 浮性原理12 稳性的分类和影响因素2、船舶阻力和推进21 阻力的种类和计算22 推进装置的工作原理和性能3、船舶操纵性31 操纵性指标32 影响操纵性的因素33 船舶的转向和避让四、航线设计与规划1、航线设计的原则和考虑因素11 安全因素12 经济因素13 气象和海况条件2、航线的拟定方法21 利用海图和航海资料22 参考以往的航行经验3、大圆航线和恒向线航线31 大圆航线的计算和应用32 恒向线航线的特点和使用场景五、船舶定位与导航1、天文定位11 太阳定位12 恒星定位2、陆标定位21 方位定位22 距离定位23 综合定位3、电子导航31 雷达导航32 AIS 系统的应用六、航海安全与法规1、国际海上避碰规则11 各类船舶的避让责任和行动12 号灯、号型和声号的使用2、海上交通安全法规21 船舶的适航要求22 船员的职责和资格3、应急处置31 船舶遇险的信号和报告32 火灾、碰撞等紧急情况的处理措施七、航海通信1、通信设备和方式11 甚高频(VHF)通信12 卫星通信13 莫尔斯电码通信2、通信程序和规范21 遇险通信22 日常通信的礼仪和格式八、海洋环境与保护1、海洋生态系统11 海洋生物多样性12 海洋生态平衡的重要性2、海洋污染防治21 油污、垃圾等污染物的来源和危害22 防止海洋污染的措施和法规以上是航海学的主要知识点汇总,通过对这些知识点的学习和掌握,可以为航海实践提供坚实的理论基础。
航海学知识点总结
航海学知识点总结————————————————————————————————作者:————————————————————————————————日期:航海学知识点汇总第一章航海学基础知识1.大地球体:大地水准面围成的球体2.大地球体两个近似体:椭圆体(进行精度较高计算如定义地理坐标和制作墨卡托海图);圆球体(简易计算如大圆航线和简易墨卡托海图)3.地理坐标:基准线是格林经线、纬线经度:由格林经线向东或向西到该点经线,范围(0—180);纬度:某点在地球椭圆子午线上的法线与赤道面交角,范围(0—90)4.经差、纬差(范围都为0—180);到达点相对于起航点的方向;Dφ=φ2-φ1 Dλ=λ2-λ1N/E为正号S/W取负号;结果为正为N/E,为负则为S/W;注意如果得出经差大于180,则用360减去其绝对值,然后符号更换。
5.关于赤道、地轴和球心对称问题(关于地心对称纬度等值反向,经度相差180°)6.关于不同坐标系修正问题:同名相加、异名相减,结果如果为负名称与原来相反。
GPS坐标系左边原点在地心。
7.方向的确定:方向是在测者地面真地平平面上确定的。
测者子午圈与测者地面真地平的交线为南北线,测者卯酉圈(东西圈)与测者地面真地平平面交线为东西线。
方向的三种表示法,要会换算。
(圆周、半圆周、罗经点)一个罗经点11.25°。
圆周法是以真北为起点顺时针0-360°,半圆法是以北或南为起点顺时针或逆时针0-180°;换算时最好用作图法比较直观。
8.理解真航向(真北到航向线);真方位(真北到方位线);舷角(航向线到方位线,两种表示法)所以真方位和相对方位(舷角)只是起算点不同,目的点相同,只是相差了真北到航向线的角度,即真航向。
要会换算:TB=TC+Q 或TB=TC+Q(右正左负),具体计算既可以用公式也可以用作图法解决(分别以测者和目标为中心做坐标系,连接测者与目标为方位线,便可一目了然。
航海学总复习
海图分类和使用
• 海图按作用、比例尺和载体的分类方法,海图使 海图按作用、比例尺和载体的分类方法, •
用注意事项 根据海图资料测量时间和资料来源、海图的出版 根据海图资料测量时间和资料来源、 和改版日期、海图小改正、海图比例尺、 和改版日期、海图小改正、海图比例尺、海图上 所标注的水深和地貌资料等鉴别海图资料的可信 赖程度 电子海图显示和信息系统的基本概念和特点 光栅海图的基本概念和特点
识 图
• 海上平台、推荐航路(航道)、深水航路、 海上平台、推荐航路(航道)、深水航路、 )、深水航路
分隔带(线)、禁航区、警戒区、无线电 分隔带( )、禁航区、警戒区、 禁航区 报告点、叠标、导标、灯船、 报告点、叠标、导标、灯船、大型助航浮 标和光弧灯标等中版海图图式 • 海上平台、推荐航路(航道)、深水航路、 海上平台、推荐航路(航道)、深水航路、 )、深水航路 分隔带( )、禁航区 警戒区、 禁航区、 分隔带(线)、禁航区、警戒区、无线电 报告点、叠标、导标、灯船、 报告点、叠标、导标、灯船、大型助航浮 标和光弧灯标等英版海图图式
狭水道航行
• 最小安全水深、富裕水深的确定,过浅滩 最小安全水深、富裕水深的确定,
航行注意事项 • 浮标导航方法及其注意事项、叠标导航方 浮标导航方法及其注意事项、 法和叠标灵敏度( 法和叠标灵敏度(方位叠标和雷达距离叠 )、导标方位导航方法 导标方位导航方法、 标)、导标方位导航方法、平行线导航方 需用雷达) 法(需用雷达) • 物标正横转向法、逐渐转向法、导标方位 物标正横转向法、逐渐转向法、 转向法、平行方位线转向法、 转向法、平行方位线转向法、平行线转向 需用雷达) 法(需用雷达)
潮汐与潮流
• 英版《潮汐表》出版情况、各卷主要内容和《潮 英版《潮汐表》出版情况、各卷主要内容和《 • • •
航海学知识点详细总结
航海学知识点详细总结一、航行的基本概念航行,即船只或飞机在海洋、空中进行的航行活动。
航行的基本概念包括航向、航线、航迹和航速等。
1.航向:航向是船只或飞机相对于地面的方向。
船只或飞机在进行航行时,需要保持一个特定的航向来达到预定的目的地。
2.航线:航线是船只或飞机在航行中规定的具体的航行路线。
航线通常是由航行图上规定的特定航线点构成的。
3.航迹:航迹是船只或飞机实际航行时在海洋或空中留下的实际轨迹。
航迹可以反映船只或飞机的航行情况和航行路线。
4.航速:航速是船只或飞机在航行中单位时间内航行的距离。
航速通常以节(nautical mile per hour)为单位来表示。
二、航海工具航海工具是指用来测定航行方向、航行位置和航行距离等信息的工具和设备。
航海工具包括罗盘、测距仪、星历表、雷达等。
1.罗盘:罗盘是用来测定船只或飞机的航向的仪器。
罗盘可以根据地球的磁场指示出船只或飞机相对于地面的方向。
2.测距仪:测距仪是用来测量船只或飞机与地面或目标的距离。
测距仪可以帮助船只或飞机确定自己的位置和距离目标的距离。
3.星历表:星历表是用来根据星象和时间来确定船只或飞机的位置的表格。
星历表可以根据星象计算出船只或飞机的纬度和经度。
4.雷达:雷达是利用无线电波来探测目标和测定目标位置的仪器。
雷达可以在船只或飞机上实时监测周围环境和判断目标位置。
三、航海技术航海技术是指用来确定船只或飞机的位置和航向的技术和方法。
航海技术包括天文导航、无线电导航、卫星导航等。
1.天文导航:天文导航是利用天体的位置来确定船只或飞机的位置和航向的技术。
天文导航需要根据星象和时间来计算出船只或飞机的位置和航向。
2.无线电导航:无线电导航是利用无线电信号来确定船只或飞机的位置和航向的技术。
无线电导航需要使用无线电设备和信标来确定位置和航向。
3.卫星导航:卫星导航是利用卫星信号来确定船只或飞机的位置和航向的技术。
卫星导航需要使用卫星导航系统和接收设备来确定位置和航向。
航海学第一篇基础知识

———————————————————————————————— 作者: ———————————————————————————————— 日期:
ﻩ
第一篇 基础知识
第一章 坐标、方形体 船舶在海上航行时,需要确定船舶的位置、航向和航程,这就要求在地球表面建立坐标系和 确定方向的基准线,因此要对地球的形状有一定的了解。 地球的自然表面是不平坦的,是一个非常复杂而又不规则的曲面。陆地上有高山、深谷和平 地;海洋里有岛屿和海沟。因此,地球的自然表面不是数学曲面,不能直接在其上进行运算,也不能 直接在其上建立坐标系。 航海上所研究的地球形状,是指由假想的大地水准面所包围的闭合几何体——大地球体。所 谓大地水准面,是指与各地铅垂线相垂直且与完全均衡状态的海平面相一致的水准面,详细地说大 地水准面是与平均海面相重合且延伸至大陆底部的一个连续的、无叠痕的、无棱角的闭合曲面。 大地球体仍是一个不规则的球体,不是数学曲面,不能直接在其上进行运算,也不能直接在其上建 立坐标系,怎么办呢?一般在航海上,以大地球体的近似体代替大地球体来建立坐标系进行航海 计算,以地球园球体作为它的第一近似体,而以地球椭园体作为它的第二近似体。 1. 第一近似体——地球圆球体
为地球中心: 地 轴 ( axis o f t h e e arth) — 地 球 自 转 的 轴
图 1-1-1 地球椭圆体示意 图
( PN PS ),即通过地球中心连结南极和北极的一条假想的线。
图 1-1-2 地球椭圆体示意图
地极(terrestrial poles) —地轴与地球表面相交的两点。从地极上空府视,以极为
格林经线(Greenwich meridian)——通过英国伦敦格林尼治天文台原址的经线(PNGP s),又称本初子午线或零度经线。
航海学-第一篇基础知识
第一篇 基础知识第一章 坐标、方向与距离第一节 地理坐标一、地球形体船舶在海上航行时,需要确定船舶的位置、航向和航程,这就要求在地球表面建立坐标系和确定方向的基准线,因此要对地球的形状有一定的了解。
地球的自然表面是不平坦的,是一个非常复杂而又不规则的曲面。
陆地上有高山、深谷和平地;海洋里有岛屿和海沟。
因此,地球的自然表面不是数学曲面,不能直接在其上进行运算,也不能直接在其上建立坐标系。
航海上所研究的地球形状,是指由假想的大地水准面所包围的闭合几何体——大地球体。
所谓大地水准面,是指与各地铅垂线相垂直且与完全均衡状态的海平面相一致的水准面,详细地说大地水准面是与平均海面相重合且延伸至大陆底部的一个连续的、无叠痕的、无棱角的闭合曲面。
大地球体仍是一个不规则的球体,不是数学曲面,不能直接在其上进行运算,也不能直接在其上建立坐标系,怎么办呢?一般在航海上,以大地球体的近似体代替大地球体来建立坐标系进行航海计算,以地球园球体作为它的第一近似体,而以地球椭园体作为它的第二近似体。
1. 第一近似体——地球圆球体在解决一般航海问题时,为了计算上的简便,通常是将大地球体当做地球园球体,其半径R =6,371,110M 。
2. 第二近似体——地球椭圆体 在较为准确的航海计算中,需要将为大地球体当做地球椭园体,如图1-1-1所示,地球椭园体是由椭圆P N QP S Q ′绕其短轴P N P S 旋转一周而形成的几何体。
地球椭园体的参数有:长半轴a 、短半轴b 、扁率c 和偏心率e ,它们之间的相互关系是:a b a c -=; a b a e 22-=; c e 22≈ 在不同的历史时期,依据的测量结果不同,因而所推算出的地球椭圆体的参数也不相同。
我国从1954年开始采用前苏联克拉索夫斯基椭圆体参数,现在准备逐步采用IUGGl975年推荐的地球椭圆体参数,参见表1-1-1。
二、地球上的基本点、线、圈把地球看做第二近似体即椭圆体,如图1-1-2所示,O 为地球中心:地轴(axis of the earth)—地球自转的轴(S N P P ),即通过地球中心连结南极和北极的一条假想的线。
航海学
④ 十六个偏点:N/E、NE/N、NE/E、E/N、E/S、SE/E、SE/S、S/E
S/W、SW/S、SW/W、W/S、W/N、NW/W、NW/N、N/W。
这样,将360o圆周等分成32个罗经点,每个罗经点为11o.25.
3.三种方向划分系统之间的换算
(1)半圆→圆周法
NE半圆,圆周度数 = 半圆度数;
航海学教案
第一篇 基础知识 第一章 坐标、方向和距离
§1—2 航向与方位 ⒉ 磁罗经差
是船上磁罗经的磁针在受到地磁和船磁合力的影响下指示的罗北(NC)偏开 真北 (NT)的角度。 (如图1-1-10所示) NC偏在NT的东面时为正(+);
NC偏在NT的西面时为负(-); △C = Var. + Dev. ⑴ 磁差(Variation, Var.)
陀螺罗经刻度盘0o所指的方向称为陀罗北(compass north, NG)。 (2)罗经差:罗经差分为:陀螺罗经差(gyro-compass error, △G);简称 陀罗差。 磁罗经差(compass error, △C)。简称罗经差。
航海学教案
第一篇 基础知识 第一章 坐标、方向和距离
§1—2 航向与方位 ⒈ 陀罗差
第二近似体 两极略扁的旋转椭圆体(航海上为了更准确地计算)。
(earth ellipsoid) 二、地理坐标(geographic coordinate) 地理坐标是建立在地球椭圆体表面上,用来表示地面上
的位置。 地球上的基本点、线、圈。
航海学教案
第一篇 基础知识
第一章 坐标、方向和距离§1—1 地球形状、地理坐标与大地坐 标系
经差与纬差(difference of longitude & latitude)分别用符号“Dλ”和“Dφ”表示。
航海学基础知识.doc

第一章航海学基础知识第一节地球形状与地理坐标一、大地球体船舶在海面上航行,实际是在地球表面的海面里航行,为了研究诸多航海问题,应该对地球的形状和大小有个基本的了解。
地球的自然表面有高山、深海,形状非常复杂。
在地球表面的3/4 被大洋所覆盖,大陆的高低起伏与地球的半径相比,又显得微不足道。
所以,航海上讨论的地球形状,并不是指其自然形状,而是指由大地水准面所包围的几何体的形状。
地球上任意一点的水准面是指通过该点且与该点的铅垂线垂直的平面。
液体的静止表面就是水准面。
设想一个与平均海面相吻合的水准面,并将它延伸到陆地内部,在延伸中始终保持此面处处与当地的铅垂线正交,这样形成的一个连续不断的、光滑的闭合曲面,叫做大地水准面。
被大地水准面所围成的球体叫做大地球体。
二、大地球体的近似体大地球体是一个不规则的几何体。
为了应用的方便,在不同的应用场合会使用到大地球体的近似体:1.第一近似体,地球圆球体(terrestrial sphere)在一般的航海计算中,例如在天文计算、构建简易墨卡托海图图网时,为了便于计算,通常将地球近似看作圆球体。
根据地球圆球面上大圆弧1′的弧长等于1 n mile 即1852m的规定,可推算出地球圆球体的半径R E :60 360×R = nmile = 3437.7468nmile = 6366707m2π2.第二近似体,地球椭圆体(earth ellipsoid)地球椭圆体也叫旋转椭圆体,在大地测量学、地图学和需要精确的航海计算中,应该将大地球体近似为两极略扁的地球椭圆体。
航海中,地理坐标的建立、墨卡托海图的绘制都是建立在地球椭圆体的基础上的。
地球椭圆体是由椭圆P N QP S Q′绕其短轴P N P S 旋转而成的几何体(图1-1-1)。
椭圆短轴P N P S(即地球的地轴earth ′s axis )的两个端点是地理北极P N 和地理南极P S;椭圆长轴QQ′绕短轴旋转所成的平面是赤道平面,它在地球椭圆体面上的截痕是赤道,赤道是一个大圆。
航海学海证重点总结
笔记航海学基础知识第一章第一节地球形状,地理坐标和大地坐标系大地球体不属于地球的任何模型,:由大地水准面所包围的几何体。
描述地球形状制作摩卡托投影海图时。
定义地理坐标时使用地球椭圆体为地球数学模型的场合:摩卡托图网时。
制作简易使用地球圆球体为地球数学模型的场合:计算大圆航线时Ψ1n mile=l852.25—9.31cos244度14分),1海里=1852 m(。
在两极附近最长1n mile的实际长度在赤道附近最短°。
180°,否则,应加减360经差的绝对值不应大于地埋纬度:某点在地球椭圆子午线上的法线与赤道面的交角经差、纬差的定义、方向性及计算??????D?90?18?D??12??????D??18??0???D??18000?12纬差,经差为正值,分别表示北纬差和东经差。
负值表示南纬差和西经差。
GPS大地坐标系采用WGS-84。
方向的确定和划分(测者地面真地平上确定方向):南北线为测者真地平与测者子午圈平面的交线;东西线为测者真地平与测者卯酉圈平面的交线。
方向划分方法有三种:圆周法半圆周法罗经点法。
圆周法是航海最常用的表示方法,半圆法是天文航海中年常用的方法。
圆周法的表示,不管百位有没有,必须要有数字,哪怕是O !!!半圆周法:读法与写法的顺序完全一样。
罗经点法(重点):基点±45°=隅点±22.5°=三字点±11.25°=偏点关于隅点:读法依然按照习惯,写法相反。
45°东北NE135°东南SE225°西南SW 315°西北NW关于三字点:读法与写法完全一致,前面加一个,偏向哪一方加上一个字母)2个(在隅点的4个区间每个区间北北东(NNE)东北东(ENE)东南东(ESE)南南东(SSE)等关于偏点:4个区间每个区间4个。
一个罗经点=11.25°后面加四个基点之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一篇基础知识
第一章坐标、方向和距离
1.名词解释:经度、纬度、经差、纬差、磁差、自差、罗经差、陀罗经差、真方位、
磁方位、罗方位、陀螺方位、真航向、磁航向、罗航向、陀螺航向、舷角、海里、灯光初显
2.地理坐标系采用的基本大圆(地理坐标系是建立在地球椭圆体上的坐标系
3.经差、纬差计算和命名方法
4.表示地球椭圆体形状和大小的参数有哪一些
5.航海中为了简化计算对地球的形状采用圆球体、精确计算时采用椭圆体。
6.航海中目前使用的划分方向的方法有哪一些
7.圆周法、半圆法、罗经点法换算
8.磁差变化与哪一些因素有关
9.自差变化与哪一些因素有关
10.磁差资料的查取
11.向位换算
12.1海里的长度计算公式
13.求地理能见距和初现距离
14.中、英版图注射程
15.求计程仪航程、计程仪改正率和到达点计程仪读数的计算
16.相对计程仪“计风不计流”的概念
17.航速校验线必备的条件
18.不同水流条件下测定船速和计程仪改正率的方法
第二章海图
1.名词解释:恒向线、纬度渐长率、基准比例尺
2.墨卡托海图采用的投影方法
3.墨卡托海图的特点
4.大圆海图的特点和投影方法
5.重要海图图式
6.中、英版海图上山高、灯高、比高、净空高度、水深采用的基本面
7.英版海图上PA、PD、ED的含义
8.如何判定海图的可靠程度
第二篇船舶定位
第一章航迹绘算
1.名词解释:东西距
2.风压差的大小与哪一些因素有关
3.风压差确定正负号的方法
4.风压差计算公式
5.压差角的测定(重点是最小距离方位和正横方位法)
6.中分纬度航法的计算
7.海图作业试行规则中对航迹推算的规定(连续不间断,只有通过狭水道、渔区可中
断。
水流显著的海区一小时一个船位,其他海区2-4小时一个船位
8.无风流情况下,推算船位的误差产生的原因有哪一些?正常情况下,航向误差和航
程误差各为多少?概率园的半径是多少?
第二章陆标定位
1.名词解释:船位差
2.航海中常用的船位线有哪几种
3.说出3种距离定位时判定双值性的方法
4.距离定位时观测物标的顺序
5.方位定位时观测物标的顺序和选择物标的原则
6.三标方位定位时产生误差三角形的原因及处理方法
7.倍角法、四点方位法、特殊角法定位的条件
8.方位移线定位注意事项
第三篇航行方法
第一章大洋航行
1.航线有哪几种类型
2.大圆航线分段的原则
3.选择大圆航线时应避开哪一些航行受限制的区域
4.选择大圆航线时应考虑哪一些因素
5.空白定位图有哪一些特点
第二章沿岸航行
1. 选择沿岸航线时应考虑哪一些因素
2. 选择沿岸航线时,确定航线离岸距离时应考虑哪一些因素(一般数据)
3.选择沿岸航线时,确定航线离危险物距离时应考虑哪一些因素
第三章狭水道航行
1.确定富裕水深大小时应考虑哪一些因素
2.通过浅滩的有利时机高潮前一小时
3.判定前方浮标是否有碰撞危险的方法
4. 狭水道航行可以采用的导航方法、转向方法、避险方法有哪一些
5.试述白天判定浅水礁盘存在的方法
6. 试述平行方位转向法
7.利用叠标导航修正航向的方法
8.利用导标导航修正航向的方法
第四章特殊条件下的航行
1.雾中航行逐点航法的优缺点
2. 雾中航行注意事项
3.冰区航行注意事项
4.利用雾号回声判定船与海岸距离的方法。