遗传算法在伺服系统参数中的应用答辩稿
遗传算法在伺服系统参数中的应用

题目遗传算法在伺服系统参数中的应用
间2 0 1 4 . 0 6____________
毕业任务书
一、题目
遗传算法在伺服系统参数中的应用
二、指导思想和目的要求
利用已有的专业知识,培养学生解决实际工程问题的能力;培养科学操作能力培养学生的团结合作攻关能力。
三、主要技术指标
关键词:摩擦模型,遗传算法,系统辨识
ABSTRACT
Friction is an impediment to improve the control accuracy of servo systems, before to achieve low-velocity and high precision control, we must compensate the friction exist in the system. Model-based friction compensation is more pertinency . Generally, this method can achieve good control effect if we can gain an exact friction model of the system. Parameters identification of friction model is the main issue of this dissertation.
1.熟悉掌握遗传算法的基本原理;
2.对伺服系统静态摩擦参数进行辨识。
四、进度和要求
第01周----第02周:英文翻译;
第03周----第04周:了解智能算法的发展趋势;
第05周----第06周:学习遗传算法;
第07周----第09周:掌握伺服系统静态摩擦模型;
基于遗传算法的电液位置伺服控制系统PID参数整定
文章编号:167321220(2009)022044203基于遗传算法的电液位置伺服控制系统P I D参数整定汤 永,吴志刚,李新民(中国直升机设计研究所,景德镇,333001)摘 要 为了改善电液伺服位置系统的控制性能,本文采用了传统遗传算法对相关P I D参数进行寻优整定。
通过仿真工具S I M UL I N K和实际试验表明,控制系统既有较快的动态响应,又有较高的稳态精度。
关键词 电液位置伺服;P I D整定;遗传算法中图分类号: V227 文献标识码: AP I D Tun i n g ba sed on Gen eti c A lgor ithm s i n Electr o2Hydrauli cPositi on Ser vo SystemT ANG Y ong,WU Zhigang,L I Xinm in(China He licop ter R esearch and Deve l opment Institute,Jing dezhen,333001)Ab stra ct I n order to i m p r ove the perf or m ances of e lec tr o2hydraulic position servo syste m,traditi onG A(Gene tic Algorithm s)was applied t o P I D Tuning.The results of S I M U L I N K si mula ti ons indicatethat the system not only has the faster dynam ic res ponse,but also shows the better ulti ma te preci2 sion.It was pr oved to be eff ective by te st also.Key word s electr o2hydraulic positi on servo;genetic a lgorithm s;P I D tuning1 前言某型直升机地面联合试验台的旋翼系统桨距变化采用电液位置伺服控制系统来实现。
自适应遗传算法在数控伺服系统控制参数优化中的应用
Z i e g l e r _ Ni c h o l s 算 法与 自适应遗传 算法整 定的 P I D控 制 系统的动 态响应性能作 了对比分析 , 仿真试验结果证 明了基 于
机床 的加工精度和可靠性受数控伺服系统工作 按照程序给定的控制算法计算控制输 出量 , 工控机发 过 程 中的诸 多 干 扰 因 素 的影 响 ,为 了进 一 步地 提 高 出 的控制 指 令通 过 D / A 和功 率放 大器 驱 动交 流 伺 服 电机 , 再 由电机转 矩通 过滚 珠丝 杠驱 动工作 台运动 。 系 统 的控制 性 能 ,我们 在 建 立 系统 模 型 时应 该 考 虑 驱 动系统 位置测量 系统 较 多 的影 响 因素 _ 1 ] 。目前工 业 控制 中常用 的控 制方 法
该数控伺服系统模型的微分方程表达式如下[ 4 ] : 电压 平衡 方 程 :
L i = 【 ( 一0 m ) 一i J — 电机 的动力 学平 衡方 程 :
=
一尺
( 1 )
( 2)
K, i 。 一l K( 1 O一 o )
工 作 台的动力 学平 衡 方程 :
一
:
控 制 系 统在 每 个 采样 周 期 内根据 测 量 系 统 的反 馈 数
Q ! ! ± : 鱼
2
+ 2 0 5 6 + 1 7 5 2 0 i ) ( s + 2 0 5 6 — 1 7 5 2 0 i )  ̄ + 8 4 6 1 . 4 ) + 2 6 . 6 2 7 1
基于免疫遗传算法优化的PID控制在交流伺服系统中的应用

服系统中难 以取得满意 的效果 。而免疫 遗传算法 (G 是 一 种 模 拟 自然 选 择 和 进 化 过 程 的 寻 优 算 IA)
法 ,能够 随对 象 的变 化 而发 生 变 化 ,除 了具 有 传
实 际角 位 移 ;e为 0 和 0比较 的偏 差 ;U为 基 于 IA的 PD控制 器 的输 出 ,6 G I 0为实 际 电机 转速 。 U 与 6的偏差 e 过 P 转速 调节器产 生期 望 的电机 0 w经 I
和抗 干扰 能力 。
关 键词 :PD控 制 ;交流伺服 系 统 ;交流 伺服 电动机 ;免疫遗 传算 法 I实验 I ,
App ia i n fPI Co r lBa e n I lc to o D nt o s d o GA n AC e v y t m i S r o S se
e i e ty a d te r s lsa e s tsa tr v d n l n h e u t r aifc oy. KEY ORD S : PI c nr l AC e v y tm ; AC s r o moo W D o to ; s r o s se e v tr; I GA ; Ex e m e t pr i n
维普资讯
基 于 免 疫 遗 传算 法 优 化 的 PD控 制 在 交 流 伺 服 系 统 中 的应 用 曾 玉金 I
~ ~ , 誊 I 【 川 l #甚| H 驰 … # * 毁 据 gt 。 ☆! § # 4 ~ 叠 馥 囊 ! 黼 癸 氍 ; 黼 群 #§诺 嚣 粕 旃
曾玉金 ,齐春 燕
( 湛江师范学院 自然科学研究 中心 ,湛江 5 44 2 0 8)
摘
要 :根据 高性 能交流伺 服 系统 的要 求 ,设 计 了一种 基 于 免疫 遗传 算 法 (G 、PD控 制 的 IA) I
基于遗传算法的伺服系统摩擦参数辨识与仿真
计 算 机 应 用 ,2016,36(S1):110—112
ISSN 1001.9081 C6 10
http://www.joca.ca
文章编号 :1001·9081(2016)s1—0l10—03
随着控制理论和计算 机技术 的不 断发展 ,伺 服系统 已在 设置得很大而这往往会受 到硬件设 备条件的限制 。其他针对
工业生产 、电力 系统 、跟踪 系统 等诸 多 领域 中得 到 了广泛 应 伺服 系统摩擦环节 补偿 的控 制方法有很多 ,如模糊控 制 、滑模
用 -3]。在伺 服系统中 ,摩擦 因素 通常 会对整 个控 制 系统产 变 结 构 控 制 、优 化 控 制 等 。
生非常大 的影 响,如果不考虑伺服系统摩擦 因素 的影 响 ,可能
针对伺 服系统的摩擦补 偿控制 方法 ,要想 获得 良好 的控
会使 系统在位 置跟踪伺 服方 式时产 生死 区或极 限环 ,引起稳 制效 果 ,首先需 要对 伺 服系统 的 摩擦 参数 进行 精确 的 辨识 。
态误差 ,继而会使系统在速度伺服时产生爬坡 或者振荡 现象 , 由于摩擦 本身是一个非 常复杂 的非线性 现象 ,它 与伺服 系统
基 于 遗传 算 法 的 伺 服 系统 摩 擦 参 数 辨识 与 仿 真
张 来福 ,田 赘 ,姜 敏 ,郝 丽花 ,刘 宏
(国网山西 省电力科学研究 院,太原 030001) ( 通信作者电子邮箱 lfzhang1967@126.com)
摘 要 :首先 ,基 于伺 服 系统 的 Stribeek摩 擦 模 型 ,利 用遗 传 算 法 对 摩擦 参 数进 行 辨 识 和 优 化 ,提 出 了基 于 Stribeck摩擦模型 的伺服 系统摩擦 参数的辨识方法 ,并根据 伺服 系统 的控 制要 求选取合适 的 目标 函数 ,以使 辨识 出来 的摩擦参数 不断逼近 实际摩擦 参数 ;然后 ,为 了验证基于遗传算法 的伺 服 系统摩擦 参数 的辨识效果 ,进 而利用上 一步 通过遗传 算法辨 识 出来的摩擦 参数 ,将传 统的 PD控制与基 于摩擦模 型补 偿 的 PD控 制方 法进行 比较 ,并利 用 Matlab 软件进行仿 真分析 。仿 真结果表明 :采 用基 于摩擦补偿 的 PD控制方法 的伺服 系统 的动态响应要优 于传统的 PD控 制 方法 ,在伺服 系统 的跟踪控 制中能够有效消除 由于摩擦 因素 引起 的跟踪误 差,提 升伺服 系统的动 态性能 。
基于遗传算法的电静压伺服系统模型参数辨识
文章编号:1004-7182(2020)01-0072-06
导弹与航天运载技术 MISSILES AND SPACE VEHICLES
DOI:10.7654/j.issn.1004-7182.20200113
No.1 2020 Sum No.372
基于遗传算法的电静压伺服系统模型参数辨识
Zhang Chun-long, Zhao Ying-xin, Zhang Peng, Hao Wei-yi, Feng Wei
(Beijing Institute of Precision Mechatronics and Controls, Beijing, 100076)
Abstract: An Electro-Hydrostatic Actuator (EHA) model, including a controller, a motor and a hydraulic actuator is constructed. The inputs and outputs of each block are recorded when testing the EHA prototype, based on which the model parameters are identified. The Least Square Identification is performed at first, whose parameters identification result is introduced into the initial group of a Genetic Algorithm Identification to get optimized. It is shown that this method is practicable, for the model with parameters from the optimized identification result matched the real system better, with over 90% similarity, both in time domain and frequency domain.
基于遗传算法优化的直流伺服电机PID控制器设计(王超)
广西科技大学毕业设计(论文)说明书课题名称基于遗传算法优化的直流伺服电机PID控制器设计系别电气与信息工程学院专业自动化班级094班学号200900301124姓名王超指导教师叶洪涛2013 年5 月23 日摘要近年来,直流伺服控制系统己经在工业生产控制等多领域得到了广泛应用。
其中应用作为动力源的直流伺服电机显得尤其重要。
PID (Proportional、Integral、Derivative)即比例、积分、微分控制规律是工业过程控制中应用最为广泛的控制策略,它具有算法简单、鲁棒性好、可靠性高的优点。
若已知PID控制器的结构,则控制器的控制品质由比例、积分时间和微分时间系数这三个参数来决定。
其控制算法比较简单,但相比之下其参数整定优化显得复杂很多。
遗传算法是一种借鉴生物界自然选择和自然遗传学机理上的迭代自适应概率性搜索算法。
自20世纪60年代诞生以来在国际上一直备受关注,近年来遗传算法的理论发展和实际应用被看作成研究热点之一。
本文运用遗传算法来来对直流伺服电机PID控制器参数进行优化设计。
首先建立直流伺服电机的模型;其次,简要介绍PID控制器原理,并介绍了衡量PID 控制系统的四项主要指标。
再次,概要介绍了遗传算法并阐述其应用步骤。
然后,运用遗传算法对直流伺服电机PID控制器参数进行整定优化,对比使用MATLAB 里的Signal Constraint模块整定的曲线来分析,最后总结了论文所做的工作,表明了使用遗传算法对直流伺服电机模型的PID控制器参数整定优化具有良好的效果,并指出了使用遗传算法进行PlD参数整定优化还有待解决的问题。
关键词:遗传算法;直流伺服电机;PID控制器;参数优化;仿真AbstractIn recent years, DC servo control system has been in the field of industrial control, etc widely application. The application of DC servo motor as a power source is especially important. PID (Proportional, Integral, Derivative) is proportional, Integral and differential control law is the most widely used in industrial process control control strategy, it has simple algorithm, the advantages of good robustness, high reliability. If known the structure of the PID controller, the controller is the control of quality by the proportional, integral and differential time coefficient to determine the three parameters. Its control algorithm is simple, but compared with its parameter setting optimization much more complex. Genetic algorithm is a kind of biological natural selection and natural genetic mechanism for reference on the iterative adaptive probabilistic search algorithm. Since its birth in the 1960s has been in the world, much attention has been paid in recent years, the theory development and practical application of genetic algorithm is considered as one of the hot research topic.This paper uses genetic algorithm to the DC servo motor PID controller parameters optimization design. First of all establish DC servo motor model; Second, briefly introduced the principle of PID controller, and introduces the four main indicators of PID control system. Again, introduces the genetic algorithm and its application procedure. Then, using genetic algorithm PID controller parameter setting of the DC servo motor optimization, contrast to use MATLAB in Signal Constraint module setting curve to analyze, finally summarizes the dissertation work, shows that using the genetic algorithm of DC servo motor setting to optimize PID controller parameters in the model has good effect, and points out that using genetic algorithm to optimize PlD parameter setting remains to be solved problem.Key words: genetic algorithm; The DC servo motor; PID controller; Parameter optimization; simulation目录摘要 (Ⅰ)Abstract (Ⅱ)第1章绪言 (1)1.1课题背景 (1)1.2本课题研究意义和目的 (2)1.3国内外研究现状 (3)1.4本文的主要研究内容 (4)第2章直流伺服电机的模型建立 (6)2.1直流伺服电机的物理模型 (6)2.2 直流伺服电机的数学模型 (6)2.2.1 电机的基本方程组 (6)2.2.2 电机的传递函数 (7)第3章PID控制器 (8)3.1PID控制器基本原理 (8)3.2PID控制系统的主要性能指标 (9)第4章遗传算法 (10)4.1遗传算法概要 (10)4.1.1遗传算法的起源及发展 (10)4.1.2遗传算法的应用领域 (11)4.1.3遗传学基本概念 (13)4.2遗传算法的应用步骤 (14)4.3遗传算法的基本流程图 (16)第5章基于遗传算法的PID控制器参数整定优化设计及仿真 (17)5.1MATLAB及S IMULINK仿真环境简介 (17)5.2基于遗传算法的PID参数整定优化 (17)5.2.1基于遗传算法的PID参数整定优化原理 (17)5.2.2基于遗传算法的PID参数整定优化流程图 (19)5.2.3基于遗传算法的PID参数整定优化步骤 (19)5.2.4基于遗传算法的PID参数整定优化结构图 (20)5.3基于遗传算法的PID参数整定优化的仿真实验 (20)结论 (25)致谢 (26)参考文献 (27)附录(程序清单) (28)第1章绪言1.1 课题背景PID控制器是最早起源发展的控制策略之一,原因在于它所涉及的设计算法和控制结构都相对比较简单,同时也十分适用于实际中的工程应用,另外PID控制方案并不要求建立精确的控制对象的数学模型,且一般采用PID控制的控制效果令人比较满意,因此在工业实际应用过程中,PID控制器是应用最为广泛的控制策略,也是历史最悠久、生命力最顽强的基本控制方式之一。
遗传算法论文答辩
遗传算法基本概念与原理
序号 遗传学概念 遗传算法概念 数学概念
9/20
1
2 3 4 5 6 7 8 9 10 11 12 13
个体
群体 染色体 基因 基因位 适应值 种群 选择 交叉 交叉概率 变异 变异概率 进化、 适者生存
要处理的基本对象、结构
个体的集合 个体的表现形式 染色体中的元素 某一基因在染色体中的位置 个体对于环境的适应程度,或在环境压力下的 生存能力 被选定的一组染色体或个体 从群体中选择优胜的个体,淘汰劣质个体的操 作 一组染色体上对应基因段的交换 染色体对应基因段交换的概率(可能性大小) 染色体水平上基因变化 染色体上基因变化的概率(可能性大小) 个体进行优胜劣汰的进化,一代又一代地优化
遗传算法提供了一种求解复杂系统问题的通用框架,它
5/20
不依赖于问题的具体领域,对问题的种类有很强的鲁棒性,所以
GA在函数优化,组合优化、生产调度问题、自动控制、机器人
学、图象处理、人工生命、遗传编码和机器学习等方面获得了广 泛的运用。从遗传算法的理论和技术两方面概述目前的研究现状;
描述遗传算法的主要特点、基本原理;应用遗传算法来解决函数
遗传算法基本概念与原理
8/20
遗传算法的基本思想正是基于模仿生物 界遗传学的遗传过程.它把问题的参数用 基因代表,把问题的解用染色体代表(在 计算机里用二进制码表示),从而得到一 个由具有不同染色体的个体组成的群体. 这个群体在问题特定的环境里生存竞争, 适者有最好的机会生存和产生后代.后代 随机化地继承了父代的最好特征,并也在 生存环境的控制支配下继续这一过程。
N
f (x j )
j 1
遗传算法基本概念与原理
交叉 就是互换两个染色体某些位上的基因。 例如, 设染色体 s1=01001011,
自适应遗传算法在数控伺服系统控制参数优化中的应用
样性的同时 , 保证 了算法 的收敛性 , 同时也保 持 了较好 的 系统稳 定性。结论 与传 统 Z g r il— e e Nco 算法的 PD参数整定进行动态响应性能对比分析与仿真试验 , i l hs I 表明基 于 自适应遗传算法的
PD参数整定方法具有一定的优越性 , I 能快速平稳地跟随期望输 出值 , 系统响应具有较好的 实时性
c se . to s B sd o h tn ad gn t l rh usd Me d ae n te s d r e e c a o tm,aP D p a ee dut e tm to spee t , h a i gi I a m t ajs n e d i rsne r r m h d
西 北大学学报 ( 自然科学 版) 2 1 年 6月 , 4 卷第 3期 , n ,0 1V 1 1N . 01 第 1 J . 2 1 , o. , o3 u 4 Ju a o ot et n esy( a rl cec dt n orl f r w s U i r t N t a Si eE io ) n N h v int grh a p r ryi r s h tt a l w ep c do tu a e a — dut t sdo d pi e e ca o tm h s u e o t ntm a icnf l et up t l p me b v il i s i i e t o o x e vu r
Ab t a t sr c :Ai T e c mb n tr l p i z t n p o lm n P D a a t rc n r l f h m h o i ao a t i o miai r b e i I p r mee o t e CNC s I o s s m sd s o o o t eT y t i i・ e
遗传算法在电液伺服系统分层模糊控制中的应用

1 系统 的描述
被 控 对 象 是 汽 车 板 簧 一小 车 系 统 , 中液 压 缸 的 其
额定载荷为 10k 小车质量约为 2 0k , 0 N, 5 g板簧具有严 重 的非 明 系统 的不 确 定性 。控 制 系统 框 图如 用
fzy c nr lb sd o e ei l oi u z o to a e n g n tcag rt hm sp o o e . I h tae ,t fte fzy c nr l r r o n ce n t a es-tefrto e i i rp s d n te srtg y woo u z o tols a ec n e td i wo ly r h e h s n sa i u z o tolrb s d o e ei oih o tmiai fzy c nrle a e n g n tcag rtm p i z t n:a d te s c n n satpia u z o tolr T u h u er ffzy r ls a d l o n h e o d o e i y c lfz y c nr l . h s te n mb so u z e n e u
h sv rid t e e e t e eso h tae y. a e fe h f ci n s ft esrtg i v
Ke wo d y r s: Ge ei g r山m Hir rhc lfzy Elcr - y a l ev Co tolr Re ltmec nrl n t a oi cl eac ia u z e to h drui s Io c nr l e a—i o to
遗传 算 法在 电液 伺 服 系统 分 层 模 糊 控 制 中的 应 用
基于遗传算法的组合优化问题研究-毕业设计答辩

随机生成城市
各个模块的具体实现
顺序 近邻表示
矩阵表示
整数编码
各个模块的具体实现
步骤三
城市编码
整数编码: n个城市分别用 0到n-1之间不 同的整数表示 ,n个数的一个 排列就代表旅 行商问题的一 个可能解 ,同 时亦是染色体 的一种构成。
自然,简单和符合逻辑 满足TSP问题的约束条件
保证了每个城市经过且只经过一次,并 且保证任何一个城市子集中不形成回路。
遗传算法的优点
遗传算法作为一种模拟生物进 化的一种算法,提供了一种求解复 杂系统优化问题的通用框架。它不 依赖于问题的具体领域,对问题的 种类有很强的鲁棒性,具有自组织、 自适应和自学习性。这种自组织、 自适应特性不需要事先描述问题的 全部特点,所以可解决那些复杂的 非结构化问题。
设计的基本流程
圆形地图:当用户选 择圆形地图时,程序 接收一个圆形地图菜 单响应消息,调用圆 形坐标地图类,然后 调用函数在屏幕上画 一个圆形地图。
直角坐标地图
圆形地图
各个模块的具体实现
步骤二
城市生成
用户可以点击鼠标左键产生城市,也可 以选择菜单栏的设置城市选项,通过输入 城市数目来随机生成城市。还可以按指定 的城市坐标,设置指定的城市。当然,如 果用户选择错了城市,可以在该城市上点 击鼠标右键来清除城市。如果用户要清除 所有的城市,可以双击鼠标右键或选择菜 单栏的结束选项,都可以清除所有的城市 。
设计中所做的改进
二
改进循环交叉算法
通过认真分析循环交叉算法的原理, 根据具体的编程实现,对原循环交叉算 法作了改进。对原循环交叉中子代初始 位设为定值的情况,在本设计中我改为 了随机值。这样,种群的结果会多样化 ,从而避免了“早熟收敛”现象。最后 ,对两种算法进行了仿真实验,并且对 实验结果进行了比较,详细情况见论文 5.4节。
遗传算法整定PID控制交流伺服系统的研究
LU C u — n , H U L , U igdn I h nf g Z O u G Q n —ig a O
( c ol f l tcl n ier g h na gU i ri f eh ooy S e yn 10 3 C ia S ho o Ee r a E g ei ,S e yn nv syo c nl , h na g10 2 , hn ) ci n n e t T g
s o grb s es go efr nc f nia iga dhg -p e y a crs o s b i , t n u t s, o dp r ma eo tjmm n i s edd nmi ep nea i y r o n o a - n h l t
Ke r s e e i lo i m; y wo d :g n tc a r h AC ev yse ; rme e p i z o g t s r o s tr paa t ro t a mi  ̄i n
① 按 照 Z e lr N c os规 则 的 间 接 整 定 方 法 :② 直 接 ige2 ih l
整 定 方 法 即 采 用 试 验 加 试 凑 的 方 式 由 人 工 整 定 。 直 接 整 定方法 是直 接 基 于 响 应 曲 线 拟 和来 整定 控 制 参数 , 而 不 需 要 其 他 中 间 步 骤 。 这 种 整 定 工 作 不 仅 需 要 熟 练 的 技 巧 , 且 往 往 还 相 当 费 时 ,更 重 要 的 是 当 被 控 对 而 象 特 性 发 生 变 化 需 要 调 节 器 参 数 作 相 应 调 整 时 ,P D I
l 遗 传 算 法 的 基 本 原 理
基 本 的遗 传 算 法 以 包 含 解 集 的 种 群 ( o uain) p p lt o 为对 象 , 种 群 中 的 个 体 ( n iiu 1 之 间 以 某 种 规 律 在 idvd a ) 进 行 交 叉 ( rso e )、 异 ( tt n) 作 , 生 成 的 co sv r 变 muai 操 o 在 新 种 群 中进 行 优 选 , 概 率 方 式 保 留 优 势 个 体 , 汰 劣 以 淘 势 个 体 , 此 周 而 复 始 , 到 进 化 目 标 。 。 它 包 含 以 如 达 。 下 操 作 : 个 体 编 码 ( n o ig 是 将 个 体 的 真 实 值 映 ① e c dn ) 射 为遗 传 编 码 的 过 程 ; 产 生 初 始 种 群 ( nt lp p l— ② iia o ua i tn i )一 般 按 照 设 定 好 的 种 群 规 模 , 随 机 的 方 式 产 生 o 以
遗传算法的人工智能在交流伺服中的设计

,
‘ ’
( =1 2 … , ) ,, 5
( 6 2— )
( ) 理 结果输 出层 : Ⅳ 推
, I
¨= D’ ’砉 』 。
(=,3 , 七1 ,4 ) 2 ,5
( 7 2— ) ( 8 2— )
0‘= ’ nt’五 ‘ / = e‘/u ’ ’z ‘ t (
出
图 2 模糊神经网络控制器结构模型 № . s u tr d l f u 2 t cuemo e o ry啦u e o kc nrl r r f mI t r o tol nw e
(I) 入层 : 输
( 2 2— )
net ‘ ’ =
( 隶属函数计算层 : Ⅱ)
一
[ i C ]/b 0‘ ¨一
( =12 i ,.七=1 2 … , ) ,, 6
( 3 2— ) ( 4 2— )
0k =z =ep nt ‘ ) i /k x ( ek ’ ‘ i i
( 综合计算层 : Ⅲ) nt =l叮 ‘ ( 5 e ‘ H i ’2— ) k’ k
维普资讯
第1 期
顾
平等 : 遗传算法 的人工智 能在 交流伺服中的设计
系统利用误差反向传播来指导学习, 模糊推理控制器有两个输入 e A , 为误差 ,e 和 ee △ 是误差的变化
率 ,d g 是给定值 , u是被控制对象输 出值 , e △ 是误差的变化率划分为 n 将 和 e 个模糊子集 , 将其用高斯型
2 模糊 神经 网络推理模型
2 1 模糊 神经 网络 控制 器 .
在人工神经网络中把信息的存储和数据处理合为一体 , 能从不完全 、 不清楚 的信息联想出来完整的信 息实现了对人类思维模式的模拟 。为 了使系统具有 良好的透 明性 , 】 在神经 网络的推理中引用了模糊规
遗传算法毕业答辩

感谢您的观看
THANKS
遗传算法的优势
遗传算法在组合优化问题中 具有全局搜索能力强、可处 理大规模问题等优势,因此 在许多领域得到广泛应用。
遗传算法的不足
虽然遗传算法在组合优化问 题中具有许多优点,但也存 在一些不足,如计算量大、 容易陷入局部最优解等问题 ,需要进一步改进和完善。
约束优化问题
01
02
03
约束优化问题
约束优化问题是指在满足 一定约束条件下寻找最优 解的问题,如线性规划、 非线性规划、整数规划等。
遗传算法与梯度下降法结 合
梯度下降法适用于连续可微的优化问题,与 遗传算法结合使用可以解决一些连续优化问 题验环境
实验数据
为了验证遗传算法的性能,我们采用了多种数据集,包括标准函数优化问题和实际应用问题,如旅行商问题、背 包问题等。
实验环境
实验在高性能计算机上进行,配置了足够的内存和处理器资源,确保算法运行速度和精度。
缺点
搜索时间长,效率较低;对于某些问 题,可能无法找到全局最优解;参数 设置对结果影响较大,需要经验丰富 的专业人员进行调整。
03
遗传算法在优化问题中的应 用
函数优化问题
函数优化问题
遗传算法通过不断迭代和选择 ,寻找函数的最优解。它可以 处理多峰值、非线性、离散和 连续等各种类型的函数优化问 题,具有全局搜索和鲁棒性强 的特点。
讨论
针对实验结果,讨论了遗传算法在实际应用中的潜力和局限性,并提出了改进方向和未 来研究展望。
06
结论与展望
研究成果与贡献
算法优化
本研究对遗传算法进行了优化,提高了算法的搜索效率和精度,为解决复杂优化问题提 供了新的思路和方法。
应用拓展
基于遗传算法的伺服系统静态摩擦辨识
0.3
0.25
Position tracking
0.2
0.15
0.1
0.05
0
0
0.05
0.1
0.15 time
0.2
0.25
0.3
0.35
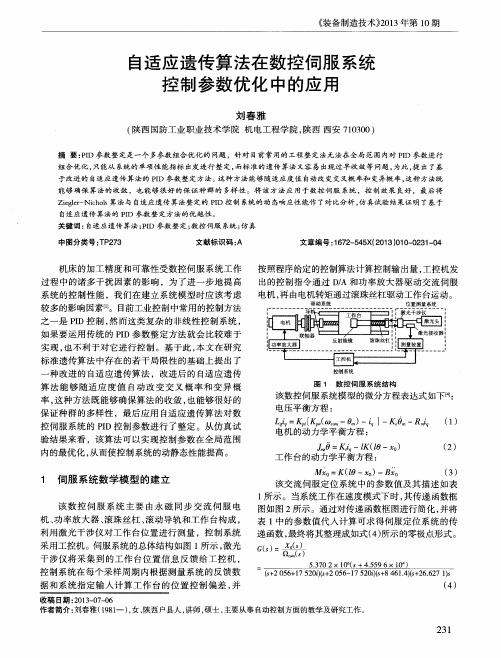
图1 恒速斜波跟踪(速度指令为1.0时)
0.4 0.3 0.2
Identified static friction force
0.1 0 -0.1 -0.2 -0.3 -0.4 -0.5 -1.5
-1
-0.5
0 w
0.5
1
1.5
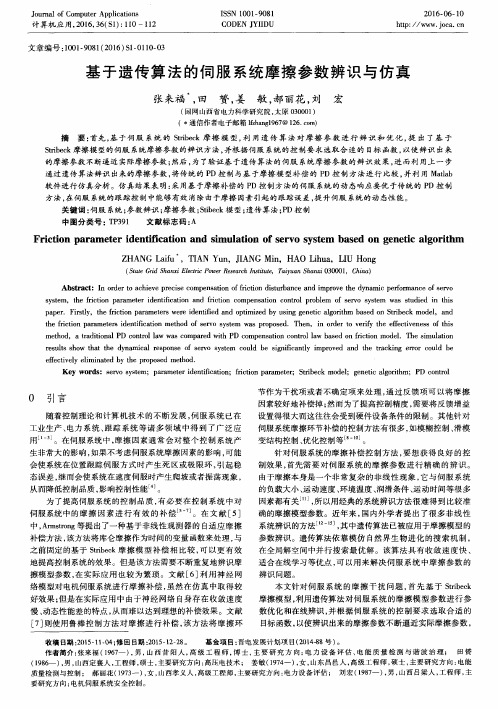
图2 Stribeck 曲线辨识
10 8
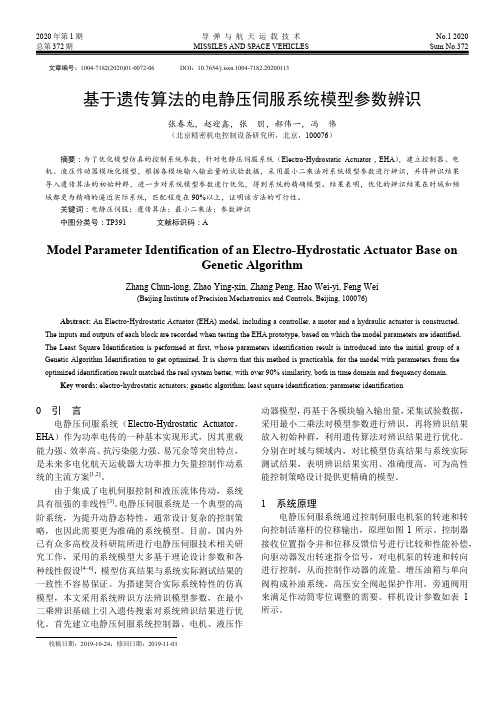
Static friction force identification error
x 10
-4
6 4 2 0 -2 -4 -6 -8 -1.5
-1
-0.5
0 speed
0.5
1
1.5
图3 Stribeck 曲线辨识误差
程序清单
i V ˆ s
2
ˆ ,
i i
0 i
(6)
ˆ ,
i i
0 i
辨识误差为
ˆi ei Fsi F s
i 1, 2,, N
其中 Fsi 值根据所建立的Stribeck曲线得 到。
•
伺服系统中摩擦现象的特点--低转速时摩 擦转矩与转速呈指数关系,高转速时摩擦 转矩与转速呈线性关系。 • 对于线性摩擦部分和非线性摩擦部分分开 进行讨论,利用线性最小二乘技术得到线 性和非线性摩擦的相应参数,这种方法简 洁,但由于伺服系统静态摩擦的模型比较 复杂,因此,应用这种方法比较麻烦,准 确性也不是很高。
遗传算法毕业答辩PPT课件

第一部分
绪论
01
第二部分
数据挖掘概述 02
第三部分 遗传算法概述
03
第四部分
遗传算法的改进 04
第1页/共40页
第五部分
遗传算法的 应用实例
05
06
第六部分 总结与展望
绪论
选题背景及研究意义 国内外研究现状
第2页/共40页
选题背景及研究意义
数据挖掘和遗传 算法在不同领域 有着广泛的应用
• 构造智能专家系统
• 利用概念进行文本挖掘
第4页/共40页
国内外遗传算法研究现状
第一部分
六十 年代
七十 年代
八十 年代
九十 年代
第5页/共40页
数据挖掘概述
定义 过程 技术 应用 问题与挑战
第6页/共40页
数据挖掘的概念
第二部分
定义:
数据挖掘就是从大量的、不完全的、有噪声的、模糊的、随机 的实际应用数据中,提取隐含在其中的、人们事先不知道的、 但又是潜在有用的信息和知识的过程 。
设第1轮随机数为0.72,则第6个 个体被选中,第2轮随机数为0.15, 则第1个个体被选中,第3轮随机 数为0.30,则第2个个体被选中; 以此类推,第4,5,6轮随机数 为0.55,0.92,0.40,则第4,9, 3个个体依次被选中。
第22页/共40页
交叉算子
单点 交叉
第三部分
多点 交叉
交叉
第32页/共40页
Matlab遗传算法GUI求函数最大值
第五部分
第33页/共40页
Matlab遗传算法求解TSP问题
第五部分
“旅行商问题”(Traveling Salesman Problem,TSP)可 简单描述为:一位销售商从n个城市中的某一城市出发, 不重复地走完其余n-1个城市并回到原出发点,在所有 可能路径中求出路径长度最短的一条。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摩擦模型
• 静态模型:
• 它描述的是物体静止时的 摩擦力,静摩擦力要大于 库仑摩擦力。当外力小于 某个值时,静摩擦力抵消 外力从而阻止物体运动。 因此静态时的摩擦力不能 仅仅描述成速度的函数, 它还和外力的大小有关。
• 动态模型:
• 人们想到用微分方程来描 述摩擦的动态特性,将摩 擦力的变化看成速度的一 个响应,提出了一系列的 动态摩擦模型。目前,微 分方程形式的动态模型成 为人们研究的热点。
遗传算法的特点
•
遗传算法与问题领域无关且快速搜索的能力是显而易见的,其搜 索从群体出发,具有潜在的并行性,可以进行多个个体的同时比较, 具有随机性、扩展性容传算法也有其不足之处,遗传算法的编程实现比较复杂需 要进行编码和解码,要得到较多的解需要较长时间。对于初始种群的 选择有一定的依赖性,遗传算法并行机制的潜在能力没有得到充分的 利用。
遗传算法概述
• 研究背景:遗传算法(Generic Algorithm简称GA)作为一种解决复杂问题的
有效方法,兴起于在80年代末和90年代初期,但它的历史起源可追溯至60年 代初期早期的研究大多以对自然系统的计算机模拟为主。80年代由Goldberg 进行归纳总结,形成了遗传算法的基本框架,目前遗传算法所涉及的主要领 域有自动控制、规划设计、组合优化、图象处理、信号处理、人工生命等。 可见,遗传算法的应用研究已从初期的组合优化求解拓展到了许多更新、更 工程化的应用方面。
• 研究意义:它可以广泛的应用于人工智能、机器学习、软件工程、知识工程、
函数的优化和控制、大系统理论、模式识别、图像处理、过程监控、机器人 控制、生物工程、神经网络等众多领域。
• 研究目标:通过父系以及母系的基因遗传,后生代比之前生代更加适应于环 境,达到优胜劣汰选择的目的,可以作为问题近似最优解。
全文总结
•
摩擦是制约伺服系统控制精度提高的一个重要因素, 要想实现伺服系统的低速高精度控制,就须对系统存在 的摩擦进行补偿。基于摩擦模型的补偿方法更加具有针 对性,如果能得到系统的比较准确的摩擦模型,一般都 能得到很好的控制效果。摩擦模型参数辨识是本文讨论 的主要问题。综述了国内外在摩擦模型参数辨识方面的 研究进展情况,详细分析了摩擦力的产生机理、摩擦的 动态现象、伺服系统中的摩擦现象以及几种常用的静态、 动态摩擦模型。通过分析、比较,从而选择静摩擦模型 Stribeck作为辨识对象进行辨识仿真。简述了遗传算法 的原理,编码方法、适应度函数、选择算子、交叉算子、 变异算子。利用 PD 控制实现被控对象精确的速度跟踪, 获取静摩擦模型Stribeck曲线,设计了基于遗传算法的 摩擦系数辨识方法,对某静摩擦模型进行参数辨识。通 过在 Matlab/Simulink 下编写程序进行辨识仿真,由仿 真结果验证了辨识方法的可行性。
•
•
•
•
摩擦对于伺服系统的意义
• 影响 在伺服系统中,摩擦是一种难以避免的、复杂的物理现象。特 别是在定位控制、低速度和速度变相的伺服系统中;摩擦力的存在给 系统带来很大的影响。一般情况下,伺服系统设计只把摩擦作为一个 干扰加以抑制,控制器设计通常没有设计摩擦动态特性的影响,这样 的设计没有考虑摩擦非线性的存在对整个系统稳定性造成的影响,随 着对伺服系统控制精度要求的提高,摩擦非线性以及动态特性已经成 为一个不可忽略的重要问题。 • 进展 对摩擦非线性环节建立准确的数学模型,无论从认识摩擦现 象的角度出发,还是从对其进行补偿,以克服摩擦给伺服系统带来的 危害、提高系统的性能的角度出发,其重要性都是不言而喻的.因此, 有关摩擦建模的研究一直十分活跃,国内外很多学者进行了大量的研 究,到目前为止,已经提出的摩擦模型有30多种。
论文题目:
遗传算法在伺服系统参数辨识中的 应用
指导教师:
班级: 学生: 学号:
论文的结构和主要内容
• 第一章:分析了摩擦对伺服系统低速及反向性能的影响, 以及如何消除这种不利影响:综述了近年来国内外在摩擦模 型建模、系统辨识、摩擦模型的参数辨识三个方面的研究 进展情况,进而提出本文的研究内容。 第二章 :比较详细的分析了摩擦现象,包括:摩擦力的 产生、摩擦的动态现象以及伺服系统中的摩擦现象,分析 了几种比较常用的静态摩擦模型和动态摩擦模型。为辨识 出比较准确的系统摩擦模型作好准备。 第三章:介绍了遗传算法的数学基础、应用步骤、编码 方法、适应度函数、选择算子、交叉算子、变异算子以及 遗传算法的运行参数,主要阐述了遗传算法的基本原理。 第四章:介绍了遗传算法应用于系统辨识的基本方法; 针对伺服系统中的摩擦现象,设计了一种基于遗传算法的 摩擦模型参数辨识方法,并通过Matlab/Simulink实现算法 仿真和仿真结果验证。 最后,对本文的工作做一个总结,并对下一步的工作做 了展望。
问题讨论——展望
本论文针对伺服系统中存在的摩擦现象,分析了摩擦对伺服系统 性能的影响以及如何消除摩擦对系统性能的影响,比较详细的分析了 摩擦力的产生摩擦的动态现象以及伺服系统中的摩擦特性,分析了几 种比较常用的静态摩擦模型和动态摩擦模型,简单介绍了遗传算法的 基本理论、数学基础及其实现方法在此基础上提出了一种基于遗传算 法的摩擦模型参数辨识和伺服系统摩擦补偿仿真,验证了遗传算法的 有效性。 • 理论上,遗传算法是同时估计参数空间中的许多点,利用遗传信 息和适者生存的策略来指导方向,所以它具有全局优化的能力,并且 不需要假定搜索空间是连续的,所以用遗传算法进行系统辨识,适应 面广、计算稳定和辨识精度高。而且利用遗传算法建模,可时确定模 型结构及参数,对于线性模型,可同时获得系统的时滞及摩擦现象。 所以在以后的学习中可继续优化遗传算法的模型参数提高计算效率。
0.2
0.25
0.3
0.35
0.4 0.3 0.2
Identified static friction force
0.1 0 -0.1 -0.2 -0.3 -0.4 -0.5 -1.5
-1
-0.5
0 w
0.5
1
1.5
辨识Stribeck曲线与实际Stribeck曲线
遗传算法模型参数辨识流程
• 根据遗传算法辨识原理设计了一个基于遗 传算法的摩擦模型参数辨识算法。针对一 个简单的二阶被控系统,认为选定一个参 数己知的摩擦模型作为系统摩擦的参考模 型,由系统的输入输出数据,利用遗传算 法辨识出系统的摩擦模型参数。并通过 MATLAB/SIMLJLINK程序实现算法仿真与 辨识结果验证。
研究框架——遗传算法主要过程示意图
基于遗传算法的摩擦参数辨识
• 伺服系统的静态摩擦模型
• 静摩擦模型Stribeck曲线的获取
• 基于遗传算法的静摩擦参数的辨识 • 仿真实例
恒速跟踪仿真图
0.35
0.3
0.25
Position tracking
0.2
0.15
0.1
0.05
0
0
0.05
0.1
0.15 time